双核驱动源代码
编写μC/OS—Ⅱ实时内核下的串行驱动
这里 u C OS l提供了两个 I R与内核的接 口函 / — I S
数 :O Itn r O ltx 。O ltne通 知 uC O . Sn t 和 SnE i SnE t E e t r / S 1 内 攘 , 中断 服 务 程 序 开始 了 实 际 上 此 函 数 做 I 的 工作 是 把 一个 全 局变 量 OSnNe t g加 1 I t si n ,在 x 6 8
个 有 源 码 的 内 棱 , 在 实 际 应 用 中 . 对 外 设 的 操 作
需 要 自行 编 写 底 层 代 码 , 中 断 处 理 是 其 中最 重 要 的
部分 。
实 时 系 统 一 个 很 重 要 的 特 性 参 数 就 是 中 断 延 迟 ( t rp ae c ‘ 自行 编 写 中断 服 务程 序 lS i e u t tn y , n r l I Rj 必 须 确 保 把 系 统 的 中 断 延 迟 限 制 在 可 接 受 的 范 围 。也 就 是 说 . 保 证 任 何 发 生 的 中 断 在 一 定 时 间 内 得 到 及 时 的 处 理 . 这 是 前 提 。异 步 串行 口是 一 个 比
址 和偏移信 息 。 在保护模式下 t中断 向量表被一个
类 似的 中断 描 述 符 表 (D I T)所 代替 , 该表 也 有 2 6 5
个条目 。I DT可位于内存中的任何位置 t 1个6字节
的 I R寄存器包含 I DT DT的位 置 。 这 里 只 考 虑 来 自外 部 的 硬 件 中断 c U 响 应 外 P 部 中 断 后 , 中 断 控 制 器 提 供 中断 向量 号 , CP 以此 U
也 已 出版 ) 对 此有 详尽 的 描 述 但 C OS I 仅 是 , / -I
步进电机2相驱动控制方向与速度程序代码

步进电机2相驱动控制方向与速度程序代码以下是一个示例的步进电机2相驱动控制方向与速度的程序代码:```pythonimport RPi.GPIO as GPIOimport time# 定义步进电机引脚IN1 = 11 # 输入1IN2 = 12 # 输入2IN3 = 13 # 输入3IN4 = 15 # 输入4# 设置GPIO模式为BOARDGPIO.setmode(GPIO.BOARD)# 设置步进电机引脚为输出GPIO.setup(IN1, GPIO.OUT)GPIO.setup(IN2, GPIO.OUT)GPIO.setup(IN3, GPIO.OUT)GPIO.setup(IN4, GPIO.OUT)# 定义步进电机旋转函数def rotate(delay, steps, clockwise=True):# 声明步进电机转动模式coil_A = [1, 0, 0, 1]coil_B = [0, 1, 1, 0]steps_per_rev = 4if not clockwise:steps = -stepsfor _ in range(steps):for i in range(4):# 设置步进电机输出状态GPIO.output(IN1, coil_A[i])GPIO.output(IN2, coil_B[i])GPIO.output(IN3, coil_A[steps_per_rev - i - 1])GPIO.output(IN4, coil_B[steps_per_rev - i - 1])# 延迟一定时间time.sleep(delay)# 控制步进电机旋转try:while True:rotate(0.01, 200, True) # 按顺时针方向旋转200步 time.sleep(1) # 停顿1秒rotate(0.01, 200, False) # 按逆时针方向旋转200步 time.sleep(1) # 停顿1秒except KeyboardInterrupt:GPIO.cleanup()```。
单片机多任务事件驱动c源码

单片机多任务事件驱动c源码以下是一个简单的单片机多任务事件驱动的C语言源码示例: c.#include <stdio.h>。
#include <stdbool.h>。
// 定义任务优先级。
#define TASK1_PRIORITY 1。
#define TASK2_PRIORITY 2。
#define TASK3_PRIORITY 3。
// 定义任务状态。
#define TASK_READY 0。
#define TASK_RUNNING 1。
// 定义任务结构体。
typedef struct {。
void (task_func)(void); // 任务函数指针。
int priority; // 任务优先级。
int status; // 任务状态。
} Task;// 定义任务数组。
Task tasks[] = {。
{task1, TASK1_PRIORITY, TASK_READY},。
{task2, TASK2_PRIORITY, TASK_READY},。
{task3, TASK3_PRIORITY, TASK_READY}。
};// 定义任务数量。
int num_tasks = sizeof(tasks) / sizeof(tasks[0]); // 定义当前运行的任务索引。
int current_task = 0;// 任务1。
void task1(void) {。
// 任务1的具体代码。
}。
// 任务2。
void task2(void) {。
// 任务2的具体代码。
}。
// 任务3。
void task3(void) {。
// 任务3的具体代码。
}。
// 事件驱动调度器。
void event_scheduler(void) {。
while (true) {。
// 遍历任务数组,找到优先级最高的就绪任务。
int highest_priority = 0;int highest_priority_task = -1;for (int i = 0; i < num_tasks; i++) {。
用于设备控制的双核驱动智能彩屏

随着 工 艺 技 术 的 发 展 , 目前 真 彩 色 T T 液 晶 F 屏( 简称 彩 屏 ) 的成 本 已低 于 同 像 素 的单 色 s TN/
屏采 样 的芯 片 、 E L D背光 控 制 芯片 。同时 , 备 P 配 C 端 软件协 助包 括美 工 设 计 及 图片 下 载在 内 的开 发 ,
统 能够方 便快捷 地 为特定 客 户定制 人机 界面 的菜 单 操作 及设 备数 据 的掉 电保 存 。
2 系统 硬 件 设 计
到彩 色 。
口指令 后 , 执行 指令 相 应 操作 , 括驱 动 TF 控 制 包 T 电路 实现 画点 、 、 线 、 形 以及 离 散 数 据 拟 合 等 圆 直 矩
G UI 功能 ; 问 串 口数 据 存 储 器 , 取 各 种 点 阵 的 访 读
1 系统 组 成 及 工 作 原 理
・
工 艺 与 应 用
・
用 于 设 备 控 制 的 双 核 驱 动 智 能 彩 屏
王 璐
( 庆 市 金 鹏 实 业 有 限公 司 , 东 肇 庆l r LCD t a — r i e O v c nt o wih Du lCo e Drv r f r De ie Co r l
图 1 系 统 组 成
来驱 动彩 屏 , 因其 庞 大 的数 据 量 而导 致 系 统 消耗 会
过多 , 响系统 对 其 他 功 能任 务 的响 应 速度 。本彩 影
1 2 工 作 原 理 .
spiFLASH芯片W25Q80的单片机驱动代码

spiFLASH芯片W25Q80的单片机驱动代码#include "w25q80.h"// 注:W25Q80由256 BYTE 组成一个 PAGE,不可PGAE擦除,可以进行BYTE PROGRAM 或者 PAGE PROGRAM// 由16 PAGE 组成一个 SECTOR,可 SECTOR擦除// 由16 SECTOR组成一个 BLOCK,可 BLOCK 擦除// 由16 BLOCK 组成一个 FULL MEMEORY,可 FULL MEMORY 擦除// 所以,总容量是1M bytes// W25Q80主要命令字#define READ_ARRAY 0x03#define SECTOR_ERASE 0x20#define BYTE_OR_PAGE_PROGRAM 0x02#define WRITE_ENABLE 0x06#define WRITE_DISABLE 0x04#define READ_STATUS_REGISTER 0x05#define Manufacturer_DeviceID 0x9F// 定义W25Q80的CS脚对应MCU的IO#define W25Q80_CS P1_2// SPI硬件初始化void Spi_Init(void)PERCFG |= 0x02; // SPI1映射到P1口P1SEL |= 0xE0; // P15~P17作复用功能(clk mosi miso) P1SEL &= ~0x04; // P12作GPIOP1DIR |= 0x04; // P12作输出P1_2 = 1; // P12输出高电平U1CSR &= ~0xA0; // SPI主方式U1GCR &= ~0xC0; // CPOL=0 CPHA=0U1GCR |= 0x20; // MSBU1BAUD = 0; // 波特率设为sysclk/8U1GCR |= 0x11;}// SPI发送与接收字节static u8 Spi_ReadWriteByte(u8 TxData){U1DBUF = TxData; // 发送数据while( !(U1CSR&0x02) ); // 等待发送完成U1CSR &= 0xFD; // 清除发送完成标志return U1DBUF;}// CS线拉低,使能芯片static void W25Q80_Enable( void ){volatile u8 i;W25Q80_CS = 0;for ( i=5; i>0; i-- ); // 延时}// CS线拉高,禁能芯片#define W25Q80_Disable() ( W25Q80_CS = 1 )// 设置FLASH芯片"写使能"static void SetW25Q80WriteEnable(void){W25Q80_Enable();Spi_ReadWriteByte(WRITE_ENABLE);W25Q80_Disable();}// 设置FLASH芯片"写禁能"//static void ClearW25Q80WriteEnable(void)//{// W25Q80_Enable();// Spi_ReadWriteByte(WRITE_DISABLE);// W25Q80_Disable();//}// 读取FLASH芯片的状态字节,可判断芯片是否busy static u8 ReadW25Q80StatusRegister(void)u8 temp;W25Q80_Enable();Spi_ReadWriteByte(READ_STATUS_REGISTER);temp = Spi_ReadWriteByte(0xF0);W25Q80_Disable();return temp;}// 读取FLASH的内容,读取的字节数没有限制void ReadW25Q80Operation(u32 addr,u8 *databuf,u32 len) {u32 i = 0;u8 temp;temp = ReadW25Q80StatusRegister();while( temp&0x01 ) // 等待FLASH芯片结束BUSY状态{temp = ReadW25Q80StatusRegister();if ( ++i>1000000 ) return;}W25Q80_Enable();Spi_ReadWriteByte(READ_ARRAY);Spi_ReadWriteByte((u8)(addr >>16));Spi_ReadWriteByte((u8)(addr >>8));Spi_ReadWriteByte((u8)addr);for ( i=0; i<len; i++ ){databuf[i] = Spi_ReadWriteByte(0xF0);}W25Q80_Disable();}// 写入FLASH,一次最多写256字节,注意不要越界(不要超过页边界)void WriteW25Q80Operation(u32 addr,u8 *databuf,u16 len) {u32 i = 0;u8 temp;temp = ReadW25Q80StatusRegister();while( temp&0x01 ) // 等待FLASH芯片结束BUSY状态{temp = ReadW25Q80StatusRegister();if ( ++i>1000000 ) return;}SetW25Q80WriteEnable(); // 设置芯片写使能W25Q80_Enable();Spi_ReadWriteByte(BYTE_OR_PAGE_PROGRAM);Spi_ReadWriteByte((u8)(addr >>16));Spi_ReadWriteByte((u8)(addr >>8));Spi_ReadWriteByte((u8)addr);for ( i=0; i<len; i++ ){Spi_ReadWriteByte(databuf[i]);}W25Q80_Disable();}// 对FLASH进行SECTOR擦除void EraseW25Q80Operation(u32 addr){u32 i = 0;u8 temp;temp = ReadW25Q80StatusRegister();while( temp&0x01 ) // 等待FLASH芯片结束BUSY状态{temp = ReadW25Q80StatusRegister();if ( ++i>1000000 ) return;}SetW25Q80WriteEnable(); // 设置芯片写使能W25Q80_Enable();Spi_ReadWriteByte(SECTOR_ERASE);Spi_ReadWriteByte((u8)(addr >>16));Spi_ReadWriteByte((u8)(addr >>8));Spi_ReadWriteByte((u8)addr);W25Q80_Disable();}// 读取FLASH芯片的JEDEC ID信息void ReadW25Q80DeviceID(u8 *buf){W25Q80_Enable();Spi_ReadWriteByte(Manufacturer_DeviceID); buf[0] = Spi_ReadWriteByte(0xF0);buf[1] = Spi_ReadWriteByte(0xF0);buf[2] = Spi_ReadWriteByte(0xF0);W25Q80_Disable();}。
uCOS-II实时操作系统内核源代码注释
/*********************************************************************************************************** uC/OS-II* 实时操作内核* 内存管理** (c) 版权 1992-2002, Jean J. Labrosse, Weston, FL* All Rights Reserved** 文件名 : OS_MEM.C* 作者 : Jean J. Labrosse* 注释 : 彭森 2007/9/2**********************************************************************************************************/#ifndef OS_MASTER_FILE#include "includes.h"#endif#if (OS_MEM_EN > 0) && (OS_MAX_MEM_PART > 0)/*********************************************************************************************************** 创建一个内存分区** 说明 : 创建一个固定大小的内存分区,这个内存分区通过uC/OS-II管理。
** 参数 : addr 内存分区的起始地址** nblks 来自分区的内存块的数目.** blksize 每个内存分区中的内存块的大小.** err 指向一个变量包含错误的信息,这个信息通过这个函数或其他来设置:** OS_NO_ERR 内存分区创建正确返回值. * OS_MEM_INVALID_ADDR 指定的是无效地址作为分区的内存存储空间* OS_MEM_INVALID_PART 没有未使用的有用的分区* OS_MEM_INVALID_BLKS 使用者指定一个无效的内存块(必须 >= 2)* OS_MEM_INVALID_SIZE 使用者指定一个无效的内存空间值* (必须大于指针的空间大小) * 返回值 : != (OS_MEM *)0 分区被创建* == (OS_MEM *)0 分区没有被创建由于无效的参数,没有未使用的分区可用**********************************************************************************************************/OS_MEM *OSMemCreate (void *addr, INT32U nblks, INT32U blksize, INT8U *err){#if OS_CRITICAL_METHOD == 3 /* Allocate storage for CPU status register 为CPU状态寄存器分配存储空间 */OS_CPU_SR cpu_sr;#endifOS_MEM *pmem;INT8U *pblk;void **plink;INT32U i;#if OS_ARG_CHK_EN > 0if (addr == (void *)0) { /* Must pass a valid address for the memory part. 必须是一个有效的内存部分*/*err = OS_MEM_INVALID_ADDR;return ((OS_MEM *)0);}if (nblks < 2) { /* Must have at least 2 blocks per partition 每个分区至少有两个分区*/*err = OS_MEM_INVALID_BLKS;return ((OS_MEM *)0);}if (blksize < sizeof(void *)) { /* Must contain space for at least a pointer 必须包含空间至少有一个指针*/*err = OS_MEM_INVALID_SIZE;return ((OS_MEM *)0);}#endifOS_ENTER_CRITICAL();pmem = OSMemFreeList; /* Get next free memory partition 得到下一个未使用的内存分区*/if (OSMemFreeList != (OS_MEM *)0) { /* See if pool offree partitions was empty 查看是否有未使用的分区空间是空的*/OSMemFreeList = (OS_MEM *)OSMemFreeList->OSMemFreeList;}OS_EXIT_CRITICAL();if (pmem == (OS_MEM *)0) { /* See if we have a memory partition 查看是否我们有一个内存分区*/*err = OS_MEM_INVALID_PART;return ((OS_MEM *)0);}plink = (void **)addr; /* Create linked list of free memory blocks 创建未使用的内存块的可连接的列表*/pblk = (INT8U *)addr + blksize;for (i = 0; i < (nblks - 1); i++) {*plink = (void *)pblk;plink = (void **)pblk;pblk = pblk + blksize;}*plink = (void *)0; /* Last memory block points to NULL 最后的内存块指针指向NULL*/pmem->OSMemAddr = addr; /* Store start address of memory partition 保存内存分区的起始地址*/pmem->OSMemFreeList = addr; /* Initialize pointer to pool of free blocks 为未使用的内存块初始化指针*/pmem->OSMemNFree = nblks; /* Store number of free blocks in MCB 在内存控制块中保存许多未使用的内存块*/pmem->OSMemNBlks = nblks;pmem->OSMemBlkSize = blksize; /* Store block size of each memory blocks 保存每个内存块的块大小*/*err = OS_NO_ERR;return (pmem);}/*$PAGE*//********************************************************************** ************************************* 得到一个内存控制块** 说明 : 从分区中得到一个内存块** 参数 : pmem 指针指向一个内存分区控制块** err 指向一个变量包含一个错误信息,这个错误信息通过这个函数或其他来设计** OS_NO_ERR 假如内存分区被正确的创建. * OS_MEM_NO_FREE_BLKS 假如没有更多的内存块被分配给调用者* OS_MEM_INVALID_PMEM 假如已经为'pmem'通过一个空指针** 返回值 : 一个指针指向一个内存控制块,假如没有察觉错误* 一个指针指向空指针,假如有错误被察觉到********************************************************************* *************************************/void *OSMemGet (OS_MEM *pmem, INT8U *err){#if OS_CRITICAL_METHOD == 3 /* Allocate storage for CPU status register 为CPU状态寄存器分配存储空间 */OS_CPU_SR cpu_sr;#endifvoid *pblk;#if OS_ARG_CHK_EN > 0if (pmem == (OS_MEM *)0) { /* Must point to a valid memory partition 必须指向一个有效的内存分区 */*err = OS_MEM_INVALID_PMEM;return ((OS_MEM *)0);}#endifOS_ENTER_CRITICAL();if (pmem->OSMemNFree > 0) { /* See if there are any free memory blocks 查看是否有其他未使用的内存块*/pblk = pmem->OSMemFreeList; /* Yes, point to next free memory block 是的,指针指向下一个未使用的内存块*/ pmem->OSMemFreeList = *(void **)pblk; /* Adjust pointer to new free list 调整指针指向一个新的未使用的空间列表*/pmem->OSMemNFree--; /* Oneless memory block in this partition 在这个分区中减少一个内存块*/OS_EXIT_CRITICAL();*err = OS_NO_ERR; /* Noerror 没有错误*/return (pblk); /* Return memory block to caller 返回内存控制块给调用者*/}OS_EXIT_CRITICAL();*err = OS_MEM_NO_FREE_BLKS; /* No, Notify caller of empty memory partition 告知调用者是空的内存分区*/return ((void *)0); /* Return NULL pointer to caller 返回NULL个调用者*/}/*$PAGE*//********************************************************************** ************************************* 释放一个内存块** 说明 : 返回一个内存块给分区** 参数 : pmem 指针指向内存分区控制块** pblk 指针指向被保留的内存块.** 返回值 : OS_NO_ERR 假如内存块是被插入的分区* OS_MEM_FULL 假如返回一个已经全部内存分区的内存块* (你释放了更多你分配的内存块!)* OS_MEM_INVALID_PMEM 假如指针'pmem'指向NULL。
基于 STM32 的电动车控制器软件-源代码
#include "led/bsp_led.h"
/* USER CODE BEGIN 0 */
#include "spiflash/bsp_spiflash.h"
/* USER CODE END 0 */
/* External variables --------------------------------------------------------*/
/*无限循环*/
while (1)
{
if(write_finish)
{
__HAL_UART_DISABLE_IT(&husartx,UART_IT_IDLE);
printf("字库烧写完成,按下KEY2读取验证\r\n");
while(KEY2_StateRead()==KEY_UP);
while(KEY2_StateRead()==KEY_DOWN);
HAL_NVIC_SetPriority(UsageFault_IRQn, 0, 0);
/* DebugMonitor_IRQn interrupt configuration */
HAL_NVIC_SetPriority(DebugMonitor_IRQn, 0, 0);
/* SysTick_IRQn interrupt configuration */
{
printf("检测到华邦串行flash W25Q32 !\n");
}
else
{
while(1)
{
printf("获取不到W25Q32 ID!\n");
基于STM32F030的SHT20驱动(实测)
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
}
/**
* IIC SDA方向设置为输出函数
*/
void IIC_SDA_OUT(void)
}
/**
* IIC总线检查对应地址的设备是否存在
*/
unsigned char i2c_CheckDevice(unsigned char Address)
{
uint8_t reAck;
IIC_SDA_IN();//SDA配置成输入
IIC_SCL_IN();//SCL配置成输入
if ( IIC_READ_SDA() && IIC_READ_SCL())
{
value <<= 1;
IIC_SCL_HIGH();
i2c_Delay();
if ( IIC_READ_SDA())
{
value++;
}
IIC_SCL_LOW();
i2c_Delay();
}
IIC_SDA_OUT();//SDA配置成输出
return value;
}
/**
* IIC总线等待响应信号
* C++ DECLARATION WRAPPER
******************************************************************************/
#ifdef __cplusplus
基于stm32f103的usb2.0代码

基于STM32F103的USB2.0代码一、简介STM32F103是意法半导体推出的一款基于ARM Cortex-M3内核的微控制器,具有丰富的外设功能和较高的性能。
USB(Universal Serial Bus)是一种通用串行总线,广泛应用于计算机和其他电子设备之间的数据传输和连接。
基于STM32F103的USB2.0代码即指针对STM32F103微控制器开发的支持USB2.0标准的代码。
二、USB2.0USB2.0是Universal Serial Bus的第二代标准,具有高速传输和广泛兼容的特点。
USB2.0可以实现最高480Mbps的数据传输速度,是USB1.1标准的40倍。
在电脑外设、数字相机、移动设备等领域得到了广泛的应用。
三、基于STM32F103的USB2.0代码开发1. 硬件支持在使用STM32F103微控制器开发USB2.0代码时,首先需要确保硬件的支持。
STM32F103系列微控制器内部集成了USB OTG(On-The-Go)功能,支持USB2.0协议。
通过配置GPIO端口和时钟等硬件资源,可以实现与USB外设的连接。
2. USB Library意法半导体提供了相应的USB库,用于快速开发基于STM32F103的USB2.0代码。
该库包括了USB设备协议栈(Device stack)和USB主机协议栈(Host stack),可以根据实际应用选择相应的协议栈进行开发。
USB库还提供了丰富的例程和示例代码,便于开发者进行参考和调试。
3. USB协议栈在开发基于STM32F103的USB2.0代码时,需要了解USB协议栈的原理和实现。
USB协议栈主要包括物理层(Physical Layer)、传输层(Transport Layer)、设备层(Device Layer)和应用层(Application Layer)等,开发者需要对每一层的功能和接口进行深入理解,以便进行代码的开发和调试。
单片机驱动步进电机程序代码
/********************************************************实现功能:正转程序使用芯片:AT89S52晶振:11.0592MHZ编译环境:Keil作者:【声明】此程序仅用于学习与参考,引用请注明版权和作者信息!********************************************************/#include<reg52.h> //库文件#define uchar unsigned char //字符型宏定义#define uint unsigned int //整型宏定义uchar tcnt; //定时器计数初值定义uint sec; //速度值定义uchar buf[11];uchar bai,shi,ge;/********************控制位定义*************************/sbit shi_neng=P1^0; // 使能控制位sbit fang_shi=P1^1; // 工作方式控制位sbit fang_xiang=P1^2;// 旋转方向控制位sbit mai_chong=P1^3; // 脉冲控制位/********************延时函数***************************/void delay1ms(uchar z){uchar x,y;for(x=0;x<z;x++)for(y=0;y<110;y++);}/***************************定时中断服务函数*************/void t0(void) interrupt 1 using 0 //定时中断服务函数{tcnt++; //每过250ust tcnt 加一if(tcnt==1) //当tcnt满足条件时{tcnt=0; //计满重新再计sec++;if(sec==6) //括号内数值越小,电机转动速度越快{sec=0; //计满重新再计mai_chong=~mai_chong; //脉冲输出}}}/***********************定时器0/1初始化****************************/void T0_Init(){ET0 = 1;TMOD = 0x22;TH0=0x06; //对TH0 TL0 赋值TL0=0x06;TR0=1; //开始定时sec=0;mai_chong=1; // 脉冲控制位}/***********************串口初始化****************************/void Uart_Init(){TMOD = 0x22;TH1 = 0xFD;TL1 = 0xFD;SCON = 0x50;PCON &= 0xef;TR1 = 1;}/***********************数据接收函数****************************/void ReceiveBuf(){int i;for(i=0;i<11;i++){buf[i] = SBUF;while(RI == 0);RI=0;}}/***********************角度控制函数****************************/ void Control(){if((bai==buf[5])&(shi==buf[6])&(ge==buf[7])){shi_neng=0;};if(bai<buf[5]){shi_neng=1;fang_xiang=0;}else if(bai>buf[5]){shi_neng=1;fang_xiang=1;};if((bai==buf[5])&shi<buf[6]){fang_xiang=0;}else if((bai==buf[5]&shi>buf[6])){shi_neng=1;fang_xiang=1;};if((bai==buf[5])&(shi==buf[6]&(ge<buf[7]))) {shi_neng=1;fang_xiang=0;}else if((bai==buf[5])&(shi==buf[6])&(ge>buf[7])) {shi_neng=1;fang_xiang=1;};if((bai==buf[5])&(shi==buf[6])&(ge==buf[7])) {};delay1ms(3);bai=buf[5];shi=buf[6];ge=buf[7];}/************************主函数****************************/main(){EA=1;T0_Init();Uart_Init();while(1){// shi_neng=1; // 使能控制位fang_shi=1; // 工作方式控制ReceiveBuf();delay1ms(1);Control();delay1ms(10);}}/*************************结束******************************/Welcome To Download !!!欢迎您的下载,资料仅供参考!。
51单片机读写AT24C02源代码详细注释
51单片机读写AT24C02源代码(详细注释)在P1口上接八个led灯,结果就显示在这八个灯上面。
AT24C02的接线方式见程序的顶部的定义。
以下是源代码:#include ;//包含头文件typedef unsigned char uchar;typedef unsigned int uint;#define write_c02 0xa0#define read_c02 0xa1sbit sda = P2^0;sbit scl = P2^1;void delay(){ //delay:5us;;}//i2c:initvoid i2c_init(){sda = 1;delay();scl = 1;delay();}//delayms:void delayms(uint xms){uchar x, y;for(x = xms; x >; 0; x--)for(y = 110; y >; 0; y--);}//start:void start() //启动i2c{sda = 1;scl = 1;delay();//延时必须大于4.7us,此约为五微秒sda = 0; //在scl为高电平时,sda一个下降沿为启动信号delay();}//stop:void stop() //停止i2c{sda = 0;scl = 1;delay();sda = 1; //在scl为高电平时,sdasda一个上升沿为停止信号delay();}//ack:void ack() //应答信号0{uchar i = 0; //等待变量scl = 1;//在scl为高电平期间等待应答delay();while((sda == 1) && i < 250)//若为应答0即退出,从机向主机发送应答信号i++;//等待一段时间scl = 0; //应答之后将scl拉低delay();}//nack:void nack() //非应答{scl = 1;//在scl为高电平期间,由主机向从机发送一个1,非应答信号delay();sda = 1;scl = 0; //应答之后将scl拉低delay();}//send byte:void send_byte(uchar date)//写一个字节{uchar i, temp;temp = date; //存入要写入的数据,即要发送到sda上的数据for(i = 0; i < 8; i++){ //发送8位temp <<= 1; //to CY 将数据的最高位移入到PSW中的CY位中scl = 0;//只有在scl为低电平时,才允许sda上的数据变化delay();sda = CY; //将CY里的数据发送到sda数据线上delay(); //可以延时scl = 1; //在scl为高电平时,不允许sda上的数据变化,使数据稳定delay();scl = 0;//允许sda数据线的数据变化,等待下一个数据的传输delay();}//wait ack:发送完一个字节数据后要主机要等待从机的应答,第九位scl = 0;//允许sda变化delay();sda = 1;//wait:ack,sda拉高等待应答,当sda=0时,表示从机的应答delay();}//read: byteuchar read_byte() //读一个字节数据{uchar i, j, k;scl = 0; //读之前先允许sda变化delay(); //等待数据for(i = 0; i < 8; i++){scl = 1; //不允许sda变化delay(); //使sda数据稳定后开始读数据j = sda; //读出sda上的数据k = (k << 1)| j; //将数据通过|运算存入k中scl = 0;//允许sda变化等待下一位数据的到来delay();}//delay();//可不用延时return k;//返回读出的数据}//write:at24c02 在at24c02中的指定地址写入数据void write_at24c02(uchar address, uchar date) {start(); //启动i2csend_byte(write_c02);//写入期间地址和写操作ack(); //从机应答0send_byte(address); //写入写数据的单元地址ack(); //ack0send_byte(date); //在指定地址中写入数据ack(); //从机应答0stop();//停止i2c}//read: at24c02在at24c02的指定地址中读出写入的数据uchar read_at24c02(address){uchar dat;//用来存储读出的数据start(); //启动i2csend_byte(write_c02); //写入at24c02器件地址和写操作ack(); //从机应答0send_byte(address); //写入要读取AT24C02的数据的单元地址ack(); //从机应答0start(); //再次启动i2csend_byte(read_c02); //写入AT24C02器件地址和读操作ack();//从机应答‘0’dat = read_byte();//读出指定地址中的数据nack(); //主机发出非应答‘1’stop(); //停止i2creturn dat;//返回读出的数据}//main:void main(){uchar i;i2c_init();start();while(1){for(i = 0x00; i < 0xff; i++){write_at24c02(10, i);delayms(10);//需等待十毫秒P1 = read_at24c02(10);//1010 1010 delayms(2000);}}}。
stm32常用驱动源码
stm32常⽤驱动源码源码的⽬录结构如下:STM32LIBUSERUSER⽬录如下hardware_drimainsoftware_modulehardware_dri⽬录Adc_hard_dri.c//uiAdData:存放AD采样的数据//ucSampleNum:存放AD采样的次数//ucRemoveNum:存放最低值与最⾼值的个数//去掉的数值放在数组0-(cRemoveNum-1)及(cSampleNum-ucRemoveNum)-(ucSampleNum-1),即最⼤值与最⼩值均放在两端void choise(u16 *uiAdData,u8 ucSampleNum,u8 ucRemoveNum){u32 i,j,k,temp;for(i=0;i<ucRemoveNum;i++)//将最⼩的ucRemoveNum值排在数组的前ucRemoveNum位{k=i; /*给记号赋值*/for(j=i+1;j<ucSampleNum;j++)if(uiAdData[k]>uiAdData[j]) k=j; /*是k总是指向最⼩元素*/if(i!=k){ /*当k!=i是才交换,否则a[i]即为最⼩*/temp=uiAdData[i];uiAdData[i]=uiAdData[k];uiAdData[k]=temp;}}for(i=ucSampleNum-1;i>ucSampleNum-ucRemoveNum-1;i--)//将最⼤的ucRemoveNum排在数组的后ucRemoveNum位 {k=i; /*给记号赋值*/for(j=i-1;j>1;j--)if(uiAdData[k]<uiAdData[j]) k=j; /*是k总是指向最⼤元素*/if(i!=k){temp=uiAdData[i];uiAdData[i]=uiAdData[k];uiAdData[k]=temp;}}}//初始化 ADC//这⾥我们仅以规则通道为例//我们默认将开启通道 0~3void Adc_Init(void){ADC_InitTypeDef ADC_InitStructure;GPIO_InitTypeDef GPIO_InitStructure;RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA |RCC_APB2Periph_ADC1 , ENABLE ); //使能 ADC1 通道时钟 RCC_ADCCLKConfig(RCC_PCLK2_Div6); //设置 ADC 分频因⼦ 6//72M/6=12,ADC 最⼤时间不能超过 14M//PA1 作为模拟通道输⼊引脚GPIO_InitStructure.GPIO_Pin =GPIO_Pin_1;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AIN;//模拟输⼊GPIO_Init(GPIOA, &GPIO_InitStructure); //初始化 GPIOAADC_DeInit(ADC1); //复位 ADC1,将外设 ADC1 的全部寄存器重设为缺省值ADC_InitStructure.ADC_Mode = ADC_Mode_Independent; //ADC 独⽴模式ADC_InitStructure.ADC_ScanConvMode = DISABLE; //单通道模式ADC_InitStructure.ADC_ContinuousConvMode = DISABLE; //单次转换模式//软件⽽不是外部触发启动ADC_InitStructure.ADC_DataAlign = ADC_DataAlign_Right; //ADC 数据右对齐ADC_InitStructure.ADC_NbrOfChannel = 1; //顺序进⾏规则转换的 ADC 通道的数⽬ADC_Init(ADC1, &ADC_InitStructure); //根据指定的参数初始化外设 ADCx 器ADC_Cmd(ADC1, ENABLE); //使能指定的 ADC1ADC_ResetCalibration(ADC1); //开启复位校准while(ADC_GetResetCalibrationStatus(ADC1)); //等待复位校准结束ADC_StartCalibration(ADC1); //开启 AD 校准while(ADC_GetCalibrationStatus(ADC1)); //等待校准结束}//获得 ADC 值//ch:通道值 0~3u16 Get_Adc(u8 ch){//设置指定 ADC 的规则组通道,设置它们的转化顺序和采样时间ADC_RegularChannelConfig(ADC1, ch, 1, ADC_SampleTime_239Cycles5 ); //通道 1 //规则采样顺序值为 1,采样时间为 239.5 周期ADC_SoftwareStartConvCmd(ADC1, ENABLE); //使能指定的 ADC1 的//软件转换启动功能while(!ADC_GetFlagStatus(ADC1, ADC_FLAG_EOC ));//等待转换结束return ADC_GetConversionValue(ADC1); //返回最近⼀次 ADC1 规则组的转换结果}//求平均函数u16 Get_Adc_Average(u8 ch){u16 uiAdd=0;u8 ucSampleNum=16;u8 ucRemoveNum=2;u16 uiAdData[16]={0};u8 i;//连续多次次采样for(i=0;i<ucSampleNum;i++)uiAdData[i]=Get_Adc(ch); //读取AD转换结果,赋予数组choise(uiAdData,ucSampleNum,ucRemoveNum) ;//去掉俩个最⼤值、去掉两个最⼩值for(i=ucRemoveNum;i<ucSampleNum-ucRemoveNum;i++)return (uiAdd/((u16)(ucSampleNum-2*ucRemoveNum))); //返回平均值}#include "stm32f10x.h"/*1,初始化GPIO位输⼊和时钟2,初始化复⽤时钟3,将gpio和外部中断挂钩起来4,设置外部中断参数、5,设置中断向量参数stm32外部中断线16个 可以匹配到任意的io⼝,但外部中断函数只有6个EXPORT EXTI0_IRQHandlerEXPORT EXTI1_IRQHandlerEXPORT EXTI2_IRQHandlerEXPORT EXTI3_IRQHandlerEXPORT EXTI4_IRQHandlerEXPORT EXTI9_5_IRQHandlerEXPORT EXTI15_10_IRQHandler中断线 0-4 每个中断线对应⼀个中断函数,中断线 5-9 共⽤中断函数 EXTI9_5_IRQHandler,中断线 10-15 共⽤中断函数 EXTI15_10_IRQHandler*/void Exit_0_Init(u8 IRQChannelPreemptionPriority_exit0, u8 IRQChannelSubPriority_exit0) {GPIO_InitTypeDef GPIO_InitStructure;EXTI_InitTypeDef EXTI_InitStructure;NVIC_InitTypeDef NVIC_InitStructure;RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_AFIO,ENABLE);GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0; //要设置的PIN//将gpioA 和外步中断0连接起来 就是gpioA.0和外部中断0GPIO_EXTILineConfig(GPIO_PortSourceGPIOA,GPIO_PinSource0);//外部中断参数EXTI_InitStructure.EXTI_Line= EXTI_Line0; //选中断0EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt; //模式是中断触发EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Rising ; //上升沿电平触发EXTI_InitStructure.EXTI_LineCmd = ENABLE; //中断使能EXTI_Init(&EXTI_InitStructure); //初始化//中断向量参数NVIC_InitStructure.NVIC_IRQChannel = EXTI0_IRQn; //使能按键所在的外部中断通道NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = IRQChannelPreemptionPriority_exit0; //抢占优先级 2, NVIC_InitStructure.NVIC_IRQChannelSubPriority = IRQChannelSubPriority_exit0; //⼦优先级 2NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //使能外部中断通道NVIC_Init(&NVIC_InitStructure); //初始化}#include "stm32f10x.h"//定时器 5 通道 1 输⼊捕获配置TIM_ICInitTypeDef TIM4_ICInitStructure;void TIM4_Cap_Init(u16 arr,u16 psc){GPIO_InitTypeDef GPIO_InitStructure;RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4, ENABLE); //①使能 TIM4 时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); //①使能 GPIOB 时钟GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6; //PB6 清除之前设置GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPD; //PB6 输⼊GPIO_Init(GPIOB, &GPIO_InitStructure);//初始化 GPIOB.6 ①GPIO_ResetBits(GPIOB,GPIO_Pin_6); //PB6 下拉TIM_TimeBaseStructure.TIM_Period = arr; //设定计数器⾃动重装值TIM_TimeBaseStructure.TIM_Prescaler =psc; //预分频器TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; // TDTS = Tck_timTIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM 向上计数模式 TIM_TimeBaseInit(TIM5, &TIM_TimeBaseStructure); //②根据指定的参数初始化 TIMxTIM4_ICInitStructure.TIM_Channel = TIM_Channel_1; // 选择输⼊端 IC1 映射到 TI1 上TIM4_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Rising; //上升沿捕获TIM4_ICInitStructure.TIM_ICSelection = TIM_ICSelection_DirectTI; //映射到 TI1 上TIM4_ICInitStructure.TIM_ICPrescaler = TIM_ICPSC_DIV1; //配置输⼊分频,不分频TIM4_ICInitStructure.TIM_ICFilter = 0x00;//IC1F=0000 配置输⼊滤波器 不滤波TIM_ICInit(TIM4, &TIM4_ICInitStructure);//③初始化 TIM4 输⼊捕获通道 1NVIC_InitStructure.NVIC_IRQChannel = TIM4_IRQn; //TIM3 中断NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2; //先占优先级 2 级NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0; //从优先级 0 级NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ 通道被使能NVIC_Init(&NVIC_InitStructure); //⑤根据指定的参数初始化 NVICTIM_ITConfig( TIM4,TIM_IT_Update|TIM_IT_CC1,ENABLE);//④允许更新中断捕获中断TIM_Cmd(TIM4,ENABLE ); //⑥使能定时器 4}#include "stm32f10x.h"#include "Iwdg_hard_dri.h"//初始化独⽴看门狗//prer:分频数:0~7(只有低 3 位有效!)//分频因⼦=4*2^prer.但最⼤值只能是 256!//rlr:重装载寄存器值:低 11 位有效.//时间计算(⼤概):Tout=((4*2^prer)*rlr)/40 (ms).//prer 4 rlr 625 时间是1svoid IWDG_Init(u8 prer,u16 rlr){IWDG_WriteAccessCmd(IWDG_WriteAccess_Enable); //①使能对寄存器 I 写操作 IWDG_SetPrescaler(prer); //②设置 IWDG 预分频值:设置 IWDG 预分频值IWDG_SetReload(rlr); //②设置 IWDG 重装载值IWDG_ReloadCounter(); //③按照 IWDG 重装载寄存器的值重装载 IWDG 计数器IWDG_Enable(); //④使能 IWDG}//喂独⽴看门狗void IWDG_Feed(void){IWDG_ReloadCounter();//reload}#include "stm32f10x.h"#include "Pwm_hard_dri.h"//TIM2 -----TIM5都⼀样//TIM3 PWM 部分初始化//PWM 输出初始化//arr:⾃动重装值//psc:时钟预分频数//pwm频率= 72000000/((arr+1)*(psc+1)) hz//周期 = ((arr+1)*(psc+1))/72000000 s// arr 为计数值//通⽤定时器每个都可以产⽣TIMX_CH1---4 路pwmvoid TIM3_PWM_Init(u16 arr,u16 psc){GPIO_InitTypeDef GPIO_InitStructure;TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); //①使能定时器 3 时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB|RCC_APB2Periph_AFIO, ENABLE); //①使能 GPIO 和 AFIO 复⽤功能时钟GPIO_PinRemapConfig(GPIO_PartialRemap_TIM3, ENABLE); //②重映射 TIM3_CH2->PB5//设置该引脚为复⽤输出功能,输出 TIM3 CH2 的 PWM 脉冲波形 GPIOB.5GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5; //TIM_CH2GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复⽤推挽输出GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOB, &GPIO_InitStructure);//①初始化 GPIO//初始化 TIM3TIM_TimeBaseStructure.TIM_Period = arr; //设置在⾃动重装载周期值TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置预分频值TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_timTIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM 向上计数模式TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure); //③初始化 TIMx//初始化 TIM3 Channel2 PWM 模式 ⼀般有4个通道TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2; //选择 PWM 模式 2TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //⽐较输出使能TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性⾼TIM_OC2Init(TIM3, &TIM_OCInitStructure); //④初始化外设 TIM3 OC2TIM_OC2PreloadConfig(TIM3, TIM_OCPreload_Enable); //使能预装载寄存器TIM_Cmd(TIM3, ENABLE); //⑤使能 TIM3}// pwmval越⼤,正脉宽越⼩void TIM3_pwm_out(u16 pwmval){TIM_SetCompare2(TIM3, pwmval);}#include "stm32f10x.h"#include "Time_hard_dri.h"//@//通⽤定时器 3 中断初始化//这⾥时钟选择为 APB1 的 2 倍,⽽ APB1 为 36M//arr:⾃动重装值。
OMAPL138基于SYSLINK的双核通信LED实例
目录1实例编译 (2)2实例演示 (3)3实例解析 (6)3.1实例程序结构解析 (6)3.2实例SYS/BIOS应用程序解析 (7)3.3实例Linux应用程序解析 (13)1 实例编译光盘中demo/syslink/ex10_led实例实现了利用MCSDK的SYSLINK组件在ARM端控制DSP端来操作开发板外设LED执行跑马灯程序。
本实例是基于ex03_notify增加DSP控制LED功能。
先按照广州创龙OMAPL138开发板的用户手册《基于OMAPL138的多核软件开发组件--MCSDK开发教程.pdf》安装MCSDK,配置、编译和安装SYSLINK。
然后将ex10_led文件夹拷贝到虚拟机/home/tl/ti/syslink_2_21_01_05/examples目录下(该路径不可随意放置,否者无法包含到SYSLINK里面的头文件),然后进入ex10_led目录,如下图所示:图1执行“sudo make clean”清除编译生成文件,执行“sudo make”命令重新编译该例程,如下图所示:图2图3在该目录的dsp/bin/debug/目录下生成.xe674格式文件server_dsp.xe674,如下图所示:图4在该目录的host/bin/debug/目录下生成Linux端可执行程序app_host,如下图所示:图52 实例演示执行此实例双核通信需要4个文件,syslink.ko、slaveloader、server_dsp.xe674和app_host。
按照《基于OMAPL138的多核软件开发组件--MCSDK开发教程.pdf》教程完成SYSLINK编译和安装后,syslink.ko和slaveloader将位于开发板文件系统如下位置:syslink.ko:/lib/modules/3.3.0/kernel/drivers/dsp/syslink.koslaveloader:开发板任意example的debug目录中,如/ex03_notify/debug/slaveloader。
多核处理器的驱动编写方法__概述说明以及解释

多核处理器的驱动编写方法概述说明以及解释1. 引言1.1 概述随着计算机技术的快速发展和应用需求的不断增加,多核处理器成为了当今计算机领域的主流。
多核处理器通过在一个物理芯片上集成多个处理单元,可以同时执行多个线程或任务,从而提高系统的性能和吞吐量。
然而,利用多核处理器的全部潜力需要合理而有效地编写驱动程序。
本文旨在介绍多核处理器的驱动编写方法,通过深入理解多核处理器的工作原理以及驱动开发环境准备,并结合驱动框架设计与实现,为读者提供一套完整且可行的指导方案。
1.2 文章结构本文共分为五个部分进行叙述。
首先在引言部分对文章进行概述说明,并介绍文章结构。
接下来,在第二部分将详细解释多核处理器的驱动编写方法,包括对多核处理器的理解、驱动编写原则以及并行性与同步性考虑等内容。
第三部分将介绍驱动开发环境准备,包括安装必要的工具和软件包、硬件配置和驱动加载以及调试技巧与工具介绍。
第四部分将重点讨论多核驱动框架的设计与实现,包括分层架构设计理念、核心数据结构和模块设计以及并行任务管理与调度等方面。
最后一部分为结论部分,对全文进行总结,并展望未来发展方向。
1.3 目的本文的主要目的是为读者提供关于多核处理器驱动编写方法的全面指导。
通过概述多核处理器的工作原理和驱动开发环境准备,读者可以了解到开发多核处理器驱动程序所需具备的基础知识和技术要求。
同时,在讲解驱动编写原则和并行性与同步性考虑时,读者可以了解到如何合理地利用多核处理器的优势,并避免可能出现的问题。
最后,针对多核驱动框架设计与实现,读者将收获如何设计和实现高效可靠的多核驱动程序的经验和方法。
通过阅读本文,读者将能够全面了解多核处理器的驱动编写方法,并在实际应用中更好地利用多核处理器带来的优势。
这对于提高系统性能、加速任务执行以及应对日益复杂的应用场景都具有重要意义。
2. 多核处理器驱动编写方法2.1 理解多核处理器在开始编写多核处理器的驱动之前,我们首先需要对多核处理器进行深入理解。
edk2代码结构

edk2代码结构Edk2代码结构Edk2是一种用于开发UEFI固件的开源项目,其代码结构是整个项目的基础。
了解Edk2代码结构对于开发者来说是非常重要的,因为它能够帮助他们快速找到需要的功能模块和文件,从而提高开发效率。
Edk2代码结构主要分为以下几个部分:核心代码、库代码、模块代码以及配置文件。
1. 核心代码Edk2的核心代码包含了UEFI规范所定义的基本功能,如UEFI Boot Service、UEFI Runtime Service等。
这些核心功能由一系列C文件和头文件实现,包括了UEFI的基本数据类型定义、全局变量定义等。
核心代码是整个Edk2项目的基础,其他部分的代码都是基于这些核心功能进行扩展和实现的。
2. 库代码Edk2提供了一系列的库代码,这些库代码提供了一些常用的功能模块,如字符串处理、内存管理、文件系统等。
这些库代码可以帮助开发者简化开发过程,提高代码的可读性和可维护性。
在Edk2的库代码中,每个功能模块都有对应的C文件和头文件,并且按照功能进行了分类和组织,以方便开发者查找和使用。
3. 模块代码Edk2的模块代码是根据具体的功能需求而编写的,它包含了各种设备驱动、协议实现、应用程序等。
模块代码通常被组织在不同的目录下,每个目录下都有一个对应的模块文件和配置文件,用于描述模块的功能和编译参数。
模块代码是Edk2项目的核心部分,它们实现了具体的业务逻辑和功能,并且可以根据需要进行扩展和修改。
4. 配置文件Edk2的配置文件用于描述项目的编译参数和构建规则。
配置文件通常以".dsc"和".fdf"为后缀,分别对应于项目的描述文件和构建规则文件。
在配置文件中,开发者可以指定需要编译的模块、编译参数、依赖关系等。
配置文件是整个Edk2项目的重要组成部分,它决定了项目的编译结果和最终生成的固件文件。
了解Edk2代码结构对于开发者来说是非常重要的,它可以帮助他们快速定位和理解代码,提高开发效率。
uCOS-ii 测试源码INCLUDES.H&OS_CFG.H&TEST.C
*/
#define OS_MBOX_DEL_EN
1
/* Include code for OSMboxDel()
*/
#define OS_MBOX_POST_EN
1
/* Include code for OSMboxPost()
*
All Rights Reserved
*
MASTER INCLUDE FILE
****************************************************************************************************
*/
#include #include #include #include #include #include #include
*/
#define OS_TASK_STAT_STK_SIZE 512 /* Statistics task stack size (# of OS_STK wide entries) */
#define OS_ARG_CHK_EN
1 /* Enable (1) or Disable (0) argument checking
*/
#define OS_CPU_HOOKS_EN
1 /* uC/OS-II hooks are found in the processor port files
*/
/* ----------------------- EVENT FLAGS ------------------------ */
/*
****************************************************************************************************
基于OMAP-L138处理器的启动驱动开发——双核启动NorFlash
1双核启动介绍1.1OMAP-L138介绍德州仪器推出具有无与伦比连接选项与定点和浮点功能的全新处理器OMAP-L138,同时这款产品也是业界功耗最低的浮点数字信号处理器,可充分满足高能效、连通性设计对高集成度外设、更低热量耗散以及更长电池使用寿命的需求。
该器件结合了一系列独特的应用优化特性和外设,能显著降低工业、通信、医疗诊断和音频等多种产品的总体系统成本。
此芯片,可通过动态电压与频率缩放及多种省电模式管理片上电源。
若配合电源管理软件和配套模拟解决方案,开发人员无需成为节能技术专家即可优化系统,提高性能,降低功耗。
OMAPL138双CPU内核高性能处理器是由德州仪器公司生产的双CPU处理器,内部包含DSP和ARM两个CPU内核。
本文介绍了一种基于Flash实现双核启动,并分别加载ARM和DSP程序的方法,介绍了OMAPL138双CPU核的自启动和开发方法,对于OMAPL138的应用有非常强的参考价值。
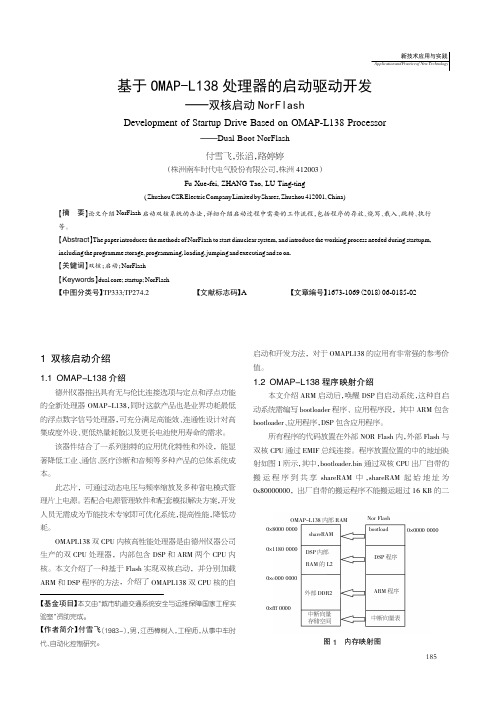
1.2OMAP-L138程序映射介绍本文介绍ARM启动后,唤醒DSP自启动系统,这种自启动系统需编写bootloader程序、应用程序段,其中ARM包含bootloader、应用程序,DSP包含应用程序。
所有程序的代码放置在外部NOR Flash内,外部Flash与双核CPU通过EMIF总线连接。
程序放置位置的中的地址映射如图1所示,其中,bootloader.bin通过双核CPU出厂自带的搬运程序到共享shareRAM中,shareRAM起始地址为0x80000000,出厂自带的搬运程序不能搬运超过16KB的二基于OMAP-L138处理器的启动驱动开发———双核启动NorFlashDevelopment of Startup Drive Based on OMAP-L138Processor———Dual Boot NorFlash付雪飞,张滔,路婷婷(株洲南车时代电气股份有限公司,株洲412003)Fu Xue-fei,ZHANG Tao,LU Ting-ting(Zhuzhou CSRElectricCompanyLimitedbyShares,Zhuzhou412001,China)【摘要】论文介绍NorFlash启动双核系统的办法,详细介绍启动过程中需要的工作流程,包括程序的存放、烧写、载入、跳转、执行等。
基于双口RAM实现双核通信模块的驱动设计
基于双口RAM实现双核通信模块的驱动设计潘必超;曹彪【摘要】The flexibility of process control is greatly affected by the relatively closed hardware architecture and limited amount of control parameters. It is a trend to develop a smart controller with open hardware architecture which can make it possible of control process network. With the use of Dual-Port RAM CY7C024AV2,A dual-core solution with DSP and ARM is presented,as long as the driver development under embedded Linux for the dual-core controller module. The driver presented provided software basis for intelligent network control methods. Experiment result shows that the driver can achieve a good performance on inter-core communication.%传统单核心控制器受制于硬件结构相对封闭,可控参数有限,一定程度上影响了工艺过程控制的灵活性。
设计一种开放式的控制器,实现过程控制网络化是当今物联网发展的趋势。
文章基于嵌入式Linux系统平台,使用高速双端口RAM芯片CY7C024AV2,提出一种模块化的DSP与ARM的双核通信模块方案及其驱动程序的设计,实现了控制器的双核数据通信功能,为控制器的网络智能控制建立了软件基础。
linux下8025T iic(I2C)驱动源代码

}
if (NULL == reg_addr && NULL != tmp ){
kfree( tmp );
printk( KERN_INFO "----kmalloc()--error--\r\n" );
return -ENOMEM;
ret,reg[0],reg[1],reg[2],reg[3],reg[4],reg[5],reg[6],reg[7] );
}
return ret;
}
static int _8025t_detach(struct i2c_adapter *adap)
{
return 0;
printk( KERN_INFO "----i2c_attach_client()--error--\r\n" );
}
printk( KERN_INFO "----_8025t_attach()--end--\r\n" );
return 0;
}
static int _8025t_probe( struct i2c_adapter *adapter )
}
memset( tmp, 0x00, count );
memset( reg_addr, 0x00, count );
reg_addr[0] = buf[0];
tmp[0] = buf[0];
msg[0].addr = p_bห้องสมุดไป่ตู้nk->client.addr;
}
char reg[]={0x00,0x30,0x30,0x10,0x30,0x20,0x08,0x10};
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Else
Exit
EndIf
Sleep(500)
[email=$EvePath=@WindowsDir&%22\Temp\Everest]$EvePath=@WindowsDir&"\Temp\Everest[/email]"
以上转自:自由天空技术论坛
源代码优化:——这是另外一个高手优化后的源代码!
If FileExists(@ScriptDir & "\Everest.exe") Then
Dim $CPUName,$S,$EvePath
RunWait(@ScriptDir & "\Everest.exe")
Sleep(1000)
ToolTip(@CR&" " & "正在安装微软补丁KB931784 ..." & " "[email=&@CR]&@CR[/email], @DesktopWidth-260, @DesktopHeight-120)
RunWait(@ScriptDir & "\DualCore\WindowsXP-KB931784-x86-CHS.exe /q /n /z")
加入对INTEL双核的支持,包括奔腾D与酷睿双核系列
偶然看到深度的有自己的双核CPU判断与自动安装,我们天空怎能没有?
可是本人的AU3水平刚刚起步,实在是写不出来深度的那个水平。不过经过多次尝试,虽然达不到完美的标准,但是也实现了双核CPU判断与自动安装双核各类相关驱动、补丁、优化程序。
$S=IniRead(EnvGet("systemdrive") & "\boot.ini","operating systems","multi(0)disk(0)rdisk(0)partition(1)\WINDOWS","")
If Not(StringInStr($S,"/usepmtimer")) Then
Sleep(1000)
ToolTip(@CR&" " & "正在安装AMD双核优化程序 ..." & " "[email=&@CR]&@CR[/email], @DesktopWidth-260, @DesktopHeight-120)
RunWait("cmd /c " & @ScriptDir & "\DualCore\AMDDualCoreOptimizer.exe /S /v/qn","",@SW_HIDE)
Sleep(2000)
Exit
EndIf
If StringInStr($CPUName,"AMD") Then
ToolTip(@CR&" 即将开始安装AMD双核CPU所需的驱动、补丁、优化程序! "[email=&@CR]&@CR[/email], @DesktopWidth-350, @DesktopHeight-120)
我并非想和深度相比,更重要的是我想让大家知道,一个平民级的人,只要努力,一样可以写出符合自己要求的小程序!
本着天空的技术开源原则,我将这个程序的源代码公开如下:
Dim $CPUName,$S,$EvePath
If FileExists(@ScriptDir & "\Everest.exe") Then
ToolTip(@CR&" CPU:" & $CPUName & " "[email=&@CR]&@CR[/email], @DesktopWidth-350, @DesktopHeight-120)
Sleep(2000)
If Not(StringInStr($CPUName,"DualCore")) Then Exit
Sleep(1000)
ToolTip(@CR&" " & "正在安装微软补丁KB936357-V2 ..." & " "[email=&@CR]&@CR[/email], @DesktopWidth-260, @DesktopHeight-120)
RunWait(@ScriptDir & "\DualCore\WindowsXP-KB936357-v2-x86-CHS.exe /q /n /z")
FileSetAttrib(EnvGet("systemdrive") & "\boot.ini","-rsh")
IniWrite(EnvGet("systemdrive") & "\boot.ini","operating systems","multi(0)disk(0)rdisk(0)partition(1)\WINDOWS",$S & " /usepmtimer")
If StringInStr($CPUName,"Athlon 64 X2") Then
ToolTip(@CR&" 即将安装AMD双核CPU所需的补丁程序! "[email=&@CR]&@CR[/email], @DesktopWidth-350, @DesktopHeight-120)
Sleep(2000)
ToolTip(@CR&" " & "正在安装AMD双核驱动..." & " /email], @DesktopWidth-260, @DesktopHeight-120)
Sleep(1000)
ToolTip(@CR&" " & "修改注册表和Boot.INI ..." & " "[email=&@CR]&@CR[/email], @DesktopWidth-260, @DesktopHeight-120)
RunWait("regedit /s " & Chr(34) & @ScriptDir & "\DualCore\DualCore.reg" & Chr(34),"",@SW_HIDE)
FileSetAttrib(EnvGet("systemdrive") & "\boot.ini","+rsh")
EndIf
Sleep(1000)
ToolTip(@CR&" " & "安装完毕!" & " "[email=&@CR]&@CR[/email], @DesktopWidth-260, @DesktopHeight-120)
EVEREST程序已经更新到最新的4.2版,双核补丁以及AMD双核优化程序也都更新到了最新版
[10.23更新]
更新至全静默安装模式!
开源终见成效,源码经自由天空论坛tegl帮忙修改后,支持全静默模式安装,十分感谢!希望更多的朋友参与研究啊,我们大家的程序,我们大家自己写!
[10.9更新]
Sleep(2000)
ElseIf StringInStr($CPUName,"Intel") Then
ToolTip(@CR&" 即将开始安装Intel双核CPU所需的补丁! "[email=&@CR]&@CR[/email], @DesktopWidth-320, @DesktopHeight-120)
RunWait($EvePath & "\Everest /r /custom user.rpf /ini report.ini /silent",$EvePath,@SW_HIDE)
Sleep(500)
$CPUName=IniRead($EvePath & "\Reports\report.ini","中央处理器","中央处理器 (CPU)|CPU 类型","")
Sleep(500)
[email=$EvePath=@WindowsDir&%22\Temp\Everest]$EvePath=@WindowsDir&"\Temp\Everest[/email]"
ToolTip(@CR&" CPU智能判断... "[email=&@CR]&@CR[/email], @DesktopWidth-260, @DesktopHeight-120)
Sleep(5000)
If Not(StringInStr($CPUName,"DualCore")) Then
ToolTip(@CR&" " & "非双核CPU,无需安装双核补丁!" & " "[email=&@CR]&@CR[/email], @DesktopWidth-260, @DesktopHeight-120)