基于Rmxprt与Maxwell2D的开关磁阻电机特性仿真
基于RMXPRT和MAXWELL的永磁同步电动机优化设计

理论与设计
基于RMXPRT和MAXWELL的永磁同步电动机优化设计
殷进省 江赛标 王文博
广东工业大学(510006)
参考文献 1 唐任远.现代永磁电机理论与设计[M].北京:机械工业出版社,
1997. 2 李 金,王步来,王桂利,吴明芹。永磁同步电动机电磁场的有限
元分析[J].电机技术,2009(2):1~3. 3 王步来.高效节能永磁同步电动机的设计研究[J ].电机技 术,
2006(2):3~5. (收 稿日期:2 011- 01-19)
作 者 简介:殷 进 省,男,19 8 3 年 生,河 南 濮 阳人,硕士 研 究 生,研 究 方向永磁同步电动机设计与优化。
2011 年第 4 期 7
根据设置,计算机将自动对200个电机方案进行 距和永磁体厚度作为优化变量,初始值变化范
计算,从中选择性能较好的方案。
围:
通过观察计算结果,选择每槽导体数为16,
0.6≤Pole Embrace≤0.9
铁心 长 度 为 8 6 的 计 算 方 案 为 最 佳 方 案 。在该 方
6.5≤Magnet Thickness≤9.5
Optimization Design of Permanent Magnet Synchronous Motor Based on RMXPRT/MAXWELL Yin Jinsheng Jiang Saibiao Wang Wenbo Guangdong University of Technology
maxwell 电磁仿真 rmxport 参数定义

题目:Maxwell电磁仿真RMXprt参数定义随着科技的不断进步,电磁仿真技术在工程设计和研发中发挥着越来越重要的作用。
Maxwell电磁仿真软件是一款功能强大的电磁场分析工具,能够帮助工程师们快速准确地进行电磁场仿真分析。
在Maxwell软件中,RMXprt是其中一个重要的参数定义工具,它能够帮助工程师定义和分析电磁仿真中的参数,从而为设计和研发工作提供重要的支持。
本文将对Maxwell电磁仿真RMXprt参数定义进行详细介绍,希望能够帮助读者更好地了解和掌握这一工具。
一、RMXprt参数定义的基本概念1.1 RMXprt的作用RMXprt是Maxwell电磁仿真软件中的一个重要工具,它主要用于定义和分析电磁仿真中的参数。
在电磁场分析中,各种参数的定义和分析是十分重要的,它们直接影响着电磁场的分布和特性。
通过RMXprt工具对参数进行准确的定义和分析,可以有效地帮助工程师们进行电磁场仿真分析,为设计和研发工作提供重要的支持。
1.2 RMXprt参数定义的基本原理RMXprt工具的参数定义是建立在Maxwell电磁场理论基础之上的,它通过对电磁场的特性进行分析和计算,从而确定各种参数的定义。
在进行参数定义时,工程师们可以根据实际需求,对各种参数进行灵活的设置和调整,以满足不同应用场景的需求。
熟练掌握RMXprt工具的参数定义原理,对于工程师们进行电磁场仿真分析具有重要的意义。
二、RMXprt参数定义的具体操作步骤2.1 打开RMXprt工具工程师们需要打开Maxwell电磁仿真软件,并选择RMXprt工具进行参数定义。
在打开RMXprt工具之后,工程师们可以看到一个界面,界面中包含了各种参数定义的选项和设置。
2.2 选择参数定义的类型在打开RMXprt工具之后,工程师们需要根据实际需求选择参数定义的类型。
Maxwell软件提供了多种参数定义的类型,包括线圈定义、磁路定义、绕组定义等。
工程师们可以根据实际需求选择相应的参数定义类型,并进行后续的操作。
基于Matlab的开关磁阻电机控制系统仿真建模研究

Reference speed
Speed controller io*
PI controller
Current co n tro l l e r
speed
p o si ti o n
Current controller
Angle sel e cti on Angle selection
i a,i b,i c
1 SRM 的数学模型
6/4 三相 SRM 是一个高阶、非线性、强耦合的多变量 系统,绕组电流的非正弦与铁心磁通密度的高饱和是 SRM 运行的两大特点[7]。为了便于分析,假定:
·1016·
系统仿真学报
Vol. 17 No. 4 Apr. 2005
(1) 三相绕组对称,每相的两个线圈作正向串联,忽略
效性,为实际电机控制系统的设计和调试提供了新的思路。
关键词:开关磁阻电机 (SRM);仿真建模;Matlab;角位置控制 (APC);电流斩波控制 (CCC)
文章编号:1004-731X (2005) 04-1015-07
中图分类号:TM352
文献标识码:A
Study on Modeling and Simulation of Switched Reluctance Motor Control System Based on Matlab
2.2 速度控制模块
为实现 SRM 性能的快速预测与优化设计,本文在分析 SRM 数学模型的基础上,借助于 Matlab 强大的仿真建模能 力,利用 Simulink 中内含的功能元件,提出了一种基于 Matlab/Simulink 建立 SRM 控制系统仿真模型的新方法,有 效克服了现有 SRM 建模方法存在的不足。其基本思想是: 将 SRM 电 机 控 制 系 统 的 功 能 单 元 模 块 化 , 在 Matlab/Simulink 中建立独立的功能模块:SRM 本体模块、 速度控制模块、电流控制模块、转角选择模块、参数计算 模块等,将这些功能模块进行有机整合,即可搭建出 SRM 控制系统整体设计的仿真模型。其中,速度环中采用 PI 控 制 , 电 流 环 中 将 角 位 置 控 制 ( APC ) 与 电 流 斩 波 控 制 (CCC)相结合,以保证电机高速、低速运行时都有理想 的控制性能。该方法思路清晰,实现便捷,效果理想,仿 真结果证明了该种建模方法的快速性和有效性。
永磁电机由磁路计算到瞬态场的仿真步骤
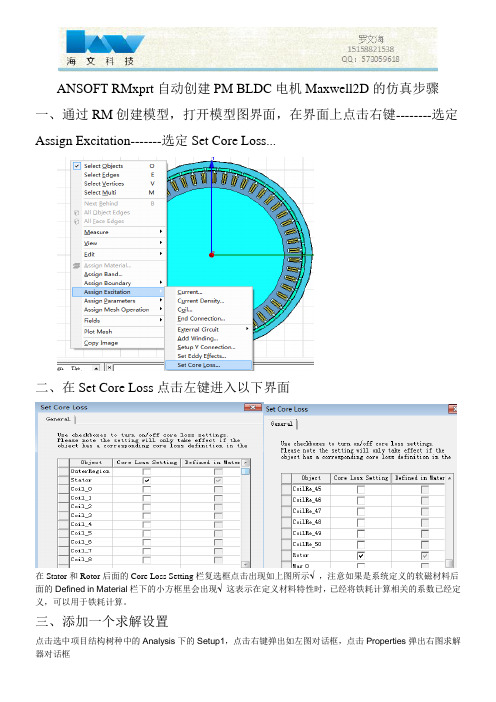
ANSOFT RMxprt自动创建PM BLDC电机Maxwell2D的仿真步骤一、通过RM创建模型,打开模型图界面,在界面上点击右键--------选定Assign Excitation-------选定Set Core Loss...二、在Set Core Loss点击左键进入以下界面在Stator和Rotor后面的Core Loss Setting栏复选框点击出现如上图所示√,注意如果是系统定义的软磁材料后面的Defined in Material栏下的小方框里会出现√这表示在定义材料特性时,已经将铁耗计算相关的系数已经定义,可以用于铁耗计算。
三、添加一个求解设置点击选中项目结构树种中的Analysis下的Setup1,点击右键弹出如左图对话框,点击Properties弹出右图求解器对话框在对话框General选项下设置求解器的停止时间Stop time通常为电机转过720º电角度(2个电角度周期)所需的时间,如果后处理电流或者转矩的瞬态波形还处于收敛状态,说明需要增加求解时间,可以设置为2.5个电角度周期。
瞬态场计算时间步长Time step一般而言越小越好,但过小会延长求解器计算时间,通常按设定的速度转动1º所需要的时间来设置。
接下来设置下图来保存系统需要保存的从开始到停止的中间计算时刻点的模型在这里,默认的设置为保存三个点的求解模型和相应的计算结果数据,可以修改起点Start、停止点Stop和时间步长Step数据获得更多的时刻点数据,然后点击Add to list增加到计算时刻点列表里,如下图所示上图设定时间步长为0.001,也就是保存包括0时刻的11个时刻点的数据,这样我们能在在后面观察到0时刻的位置,观察磁钢轴线(D轴)和电机A相轴线的位置关系(在《ANSOFT仿真中的初始位置和编码器零点分析》中会详细讨论。
三、按照下图所示在Analysis处Setup1处点击右键弹出如下对话框,选中Analysis点击开始计算四、按下图所示在Results处点击右键弹出如下对话框依次如图选中Create Transient Report-------Rectangular Plot点击左键进入到第五步五、经过第四步骤操作将弹出下面的对话框,在图中Gategory选中Loss,然后选中Coreloss,选中项背景框如图变蓝,然后点击图中的New Report,这样就能在ANSOFT Results中添加XY Plot 1显示结果。
基于Rmxprt与Maxwell2D的开关磁阻电机特性仿真

基于Rmxprt与Maxwell2D的开关磁阻电机特性仿真江华
【期刊名称】《防爆电机》
【年(卷),期】2014(049)006
【摘要】在Ansoft机电系统Rmxprt模块中建立了SRM的二维模型,且在Rmxprt中仿真,得到了开关磁阻电机的相电流、转矩、功率、效率等特性曲线,得出了电机在额定转速下效率最高输出功率却不是最大的结论;并将其导入Maxwell2D中,在XY平面中,对模型分组、材料设置、边界及激励源设置等相关设置后,做了进一步的基于瞬态场的有限元分析,得到了电机在不同时刻的磁力线、磁通密度、磁密矢量等信息;最后通过对比两个仿真结果,再次验证了此建模仿真方法的正确,这为SRM的分析与控制提供了有效的理论依据.
【总页数】5页(P24-28)
【作者】江华
【作者单位】西安科技大学电气与控制工程学院,陕西西安710054
【正文语种】中文
【中图分类】TM301.2;TM352
【相关文献】
1.基于Ansoft Maxwell2D的永磁机构的仿真研究 [J], 陈加明;
2.基于Matlab/Simulink和Ansoft/Rmxprt的开关磁阻电机系统控制仿真研究[J], 赵影;刘娅如
3.基于RMxprt和Maxwell2D对阀门电动装置电磁分析 [J], 童法松
4.基于Maxwell2D的开关磁阻电机特性仿真研究 [J], 邱银;郝润科;赵龙;王磊;祖军
5.基于Maxwell2D的开关磁阻电机特性仿真 [J], 邱银;郝润科;赵龙;王磊
因版权原因,仅展示原文概要,查看原文内容请购买。
基于MATLAB的开关磁阻电动机非线性动态模型仿真_陈新

基于M A T LAB 的开关磁阻电动机非线性动态模型仿真浙江大学 陈新 郑洪涛 蒋静坪 摘要:文章基于开关磁阻电动机磁化特性提出了一种新型S RM 非线性动态模型。
根据这种S RM 非线性动态模型,在M atlab /Simulink 环境下对SRM 、功率变换器及其控制系统进行了建模和仿真,仿真结果如实地反映了SRM 的实际工作状况。
关键词:开关磁阻电动机(S RM ) 仿真 M atlab/Sim ulinkNon -linear Dynamic Modeling of SRM Based on MatlabChen Xin Zheng Hongtao Jiang JingpingAbstract :T his paper presents a sim ple developed nonlinear dynamic model for a sw itched relu ctan ce motor based on its m agn etic characteris tics.According to the SRM nonlinear dyn amic model,th e complete m odel of SRM drive sys tem w hich includes the motor ,the converter and the associated control system h as been develop ed in th e M atlab /Simulink envir on ment .T he s imulation resu lts really report w ork status of SRM .Keywords :s w itched reluctance motor(SRM ) sim ulation M atlab/S imulin k1 引言开关磁阻电动机调速系统(SRD )融开关磁阻电动机与现代电力电子技术、控制技术为一体,兼有异步电动机变频调速系统和直流电动机调速系统的优点。
基于Matlab的开关磁阻电机控制系统仿真建模新方法

基于Matlab的开关磁阻电机控制系统仿真建模新方法开关磁阻,论文,DSP,控制第18卷第2期浙江万里学院学报Vol.18No.2纪志成,薛花(江南大学控制科学与工程研究中心电气自动化研究所,江苏无锡214122)摘要:在分析开关磁阻电机(SRM)数学模型的基础上,利用C语言编写S-函数,提出了SRM控制系统仿真建模的新方法.在Matlab/Simulink中,构造CME某S-函数的三类简化结构,建立独立的功能模块,如电机本体模块、速度控制模块、电流滞环控制模块等,通过功能模块的有机整合,搭建SRM控制系统快速高效的仿真模型.系统采用双闭环控制:速度环采用PI控制,电流环采用角位置控制(APC)与电流斩波控制(CCC)相结合的方法,保证了SRM在低速或高速运行时都可获得满意的性能.仿真结果证明了采用CME某S-函数方式仿真建模的快速性和有效性.关键词:CME某S-函数;开关磁阻电机(SRM);仿真建模;快速性作者简介:纪志成,江南大学控制科学与工程研究中心电气自动化研究所教授,博士,博士生导师;薛花,江南大学控制科学与工程研究中心博士研究生。
1引言因其结构简单、可靠性高、性能优良、输出转矩大等特点,开关磁阻电机(SRM)应用广泛[1],且随着SRM应用领域的不断拓宽,对电机控制系统设计要求越来越高,既要考虑成本低廉、控制算法合理,又需兼顾控制性能好、开发周期短.如何建立有效的SRM控制系统的仿真模型成为电机控制算法设计人员迫切需要解决的关键问题,因此,对于建立电机控制系统仿真模型方法的研究具有十分重要的意义[2,3].对于在Matlab中进行交流异步电机仿真建模方法的研究已成为探讨的热点,例如通过编写m文件可在Simulink环境下实现SRM控制系统的仿真建模[4],虽然m文件形式的S-函数具有容易编写和理解的优点,但由于它在每个仿真步都要激活Matlab解释器,使得仿真速度变慢,且这种方法实质上是一种整体分析法,因而在这一模型基础上修改控制算法或添加、删除闭环就都需对整体系统重新建模.为此,文献[5,6]提出在Matlab/Simulink中构造独立的功能模块,通过模块组合进行交流异步电机建模,通过模块组合进行交流异步电机建模,这一方法可观性好,在原有的建模基础上添加、删除闭环或改变控制策略都十分便捷,但模块化建模的方式存在控制策略难以硬件实现的问题.开关磁阻,论文,DSP,控制2浙江万里学院学报2005年4月2CME某S-函数的简化结构利用Matlab/Simulink进行运动控制系统的建模仿真是普遍采用的方法之一,而S-函数,尤其是CME某S-函数,正是整个Simulink动态系统的核心,它不仅提供了增强和扩展Simulink能力的强大机制,同时也是使用RTW(RealTimeWorkhop)实现实时仿真的关键所在,也因此十分适合于复杂动态系统的数学描述,支持连续、离散以及两者混合的线性和非线性系统的仿真建模[7].Matlab提供了名为funtmpl_baic.c的CME某S-函数模板,包含了所有的子程序,较为复杂,本文在此基础上提出了简单实用的三类简化结构,如图1所示.结构A结构B图1CME某文件简化结构结构C结构A:仅包含3个子函数,Initialization子函数完成S-函数的初始化工作,如初始化结构体SimStruct、设置输入/输出口、设置采样时间等;mdlOutput子函数描述S-函数的输出方程,输出值是状态某、输入u和时间t的函数,而不包括任何动态方程(微分或差分)在内;Termination子模块在仿真结束时调用,可在此完成结束仿真所需的工作.结构A仅完成由输入直接计算输出的函数描述,采样时间可为连续的或离散的,但不含状态向量,因而没有mdlUpdate子函数和mdlDerivative子函数.结构B:在结构A的基础上增加了mdlDerivative子函数,用于连续状态的求解.状态向量的一阶导是状态某、输入u和时间t的函数,通过mdlDerivative子函数完成计算,并将结果返回供求解器积数某分.结构C:在结构A的基础上增加了mdlUpdate子函数,用于离散状态的求解.下一步状态向量的值某k+1依赖于当前的状态某、输入u和时间t,通过mdlUpdate子函数完成计算,并通过求解器传递给其他模块.将这三类简化的CME某S-函数有机组合,即可完成SRM控制系统的最小化建模,实现占用最少资源的高效仿真,由于结构简单,不仅可使CME某S-函数编程灵活,删改方便,更确保了CME某S-函数高速仿真的特性.3SRM数学模型与控制系统的建立SRM控制系统采用双闭环控制方案:转速环由PI调节器构成,电流环由角位置控制器(APC)与电流斩波控制器(CCC)复合构成.根据模块化建模的思想,将控制系统分割为各个功能独立的子模块,主要包括:SRM本体模块、速度控制模块、电流控制模块、转角选择模块、参数计算模块和电压逆变模块.利用CME某S-函数编程实现各模块的功能,再将这些功能模块有机整合,即可在Matlab/Simulink中搭建SRM控制系统的仿真模型,实现双闭环的控制算法.各功能模块的构建方法与数学模型简述如下.3.1SRM本体模块电机本体模块是控制系统的仿真模型中的关键部分,描述了SRM的本质属性,该模块完成求取SRM三相相电流、电机转速和位置信号的功能,主要由两个子模块组成:相电流生成子模块和转矩计算子模块.对于6/4三相SRM,第k相绕组的电压平衡方程可表示为LdiLdθUk=Rik+(Lk+ikk)k+ikk(1)ikdtdt开关磁阻,论文,DSP,控制第2期纪志成,薛花:基于Matlab的开关磁阻电机控制系统仿真建模新方法3式中:k=a,b,c;Uk为k相绕组电压;R为转子相电阻;Lk为k相绕组电感;ik为k相绕组电流;θ为转子位移角.根据电压平衡方程式(1)建立相电流生成子模块,模块输入量为电机转速ωr、逆变器输出的各相电压Uk(k=a,b,c)和参数计算模块输出的各相绕组电压计算参数Lt,k和Mk,输出量为各相相电流ik.SRM的电磁转矩方程为Te=运动方程为k=a,b,c∑Te,k,Te,k=θ∫ik0Ψk(ik,θ)dik(2)dωr(3)dt式中:Te为电磁转矩;Te,k为k相电磁转矩;Tl为负载转矩;ωr 为电机机械角速度;J为转动惯量.根据SRM电磁转矩方程式(2)建立转矩计算子模块,模块输入为各相电磁转矩Te,k,通过加和模块即可求得电磁转矩信号Te.同时根据运动方程式(3),由电磁转矩Te和负载转矩Tl,通过加乘、积分环节,即可得转速信号ωr,求得的转速信号经过积分可得到转子位置信号θ.TeTl=J3.2速度控制模块速度控制模块采用PI算法,结构简单,单输入:参考转速和实际转速的差值,单输出:参考相电流某,实现该功能的数学表达式可写为幅值i0某i0=kpe(t)+ki∫e(t)dt(4)0t式中:kp为PI控制器中P(比例)的参数,ki为PI控制器中I(积分)的参数,e(t)为参考转速与实际某转速的差值,即e(t)=wr(t)wr(t).3.3电流控制模块电流控制模块的作用是实现电流APC和CCC方式的复合控制,模块输入为参考相电流幅值i0,位移角θ,转速ωr和SRM本体模块输出的三相相电流ia,ib,ic,输出为逆变器控制信号.当转速ωr大于基速ωb 时,采用APC方式,输出恒功率特性,通过调节开通角θon、关断角θoff,改变相电流峰值、有效值,以达到由转矩调节实现转速调节的目的.APC方式下,固定外加电压Ud,可按比例增大导通角θc=θoffθon,以补偿转矩的下降,实现恒功率输出特性.APC方式下的相电流波形如图2(a)所示.当转速ωr小于基速ωb时,采用CCC方式,输出恒转矩特性,通过电流的限幅控制Ud加在导通相绕组上的有效时间,实现了最大磁链和最大电流的限定.CCC方式下,固定θon、θoff,通过斩波控制外加电某压Ud,若电流超出参考相电流i0幅值上限,则功率开关器件关断,迫使电流下降;若超出参考相电流幅值下限,则功率开关器件导通,又使电流开始回升,因此相电流波形近似“理想平顶波”.CCC方式下的相电流波形如图2(b)所示.电流控制模块采用APC与CCC方式的复合控制,可保证在额定运行曲线下方,SRM可运行在任一希望的机械特性上,实现较宽范围的调速特性,使仿真特性更为准确,模型性能更为优越.L(θLLmini(θL(θL某Lmini(θonoffz(a)onoffz(b)(a)APC方式(b)CCC方式图2相电流波形开关磁阻,论文,DSP,控制4浙江万里学院学报2005年4月3.4转角选择模块转角选择模块实现由位移角信号θ进行电机运行状态选择的功能.SRM相电感L(θ)的变化周期正比D于转子极对数,因此6/4三相SRM相电感的变化周期τr=90.一周期内,转子位置信号与相选择信号的对应关系如表1所示,输出的相选择信号直接输入参数计算模块,进行各相电压方程运算参数和转矩的求取.表1转子位置信号与相选择信号对应关系表3.5参数计算模块位置信号0~π/6相选择信号100对应相a相010π/6~π/3b相参数计算模块利用相选择信号、角位移θ和各001π/3~π/2c相相电流ia,ib,ic,求取参与SRM本体模块中电压平衡方程运算的参量Lt,k,Mk与各相转矩Te,k(k=a,b,c).SRM磁路的非线性、磁通的复杂分布及相间的非线性耦合等因素,使得SRM模型中Lt,k,Mk参数的求取、电磁转矩Te,k的解析计算极为复杂,为以最简洁的近似方法计算出这些参变量,本文采用磁化特性曲线分段线性化的方法,以分饱和段和非饱和段两部分线性特性来近似非线性磁化曲线.基于此准线性模型可推理求得Lt,k,Mk,Te,k的计算公式分别为(Ψadia)0ia≤iLuia≤iΨa0ia≤i,,(5)Lt,a=Ψa==T===Me,aa >0ii>>Lii0iiiaauaaKK2KΨi(d)iiib≤i(6)θθ+≤L()iiiii≤ΨbuΨbb,0b,bb=i2iTe,b==Lt,b=Mb=b=iibθKii>iLuib>ibbKib>iK2KπK(d)Ψicc(θ0+θ)ic≤iicic≤i(7)Ψcicic≤i,ΨcLu+==Ti3=Mc==iLt,c=2ie,cicθKii>iccLuic>iKic>i式中:Lu=Ψminima某为未饱和电感;K=(Ψma某ima某Lu)3.6电压逆变模块β,β为定子极弧;i为磁化曲线开始弯曲处对应的电流值;θ0为电感开始上升变化时对应的位移角.电压逆变模块实现的是逆变器功能,输入为电流控制模块给出逆变控制信号,可根据电机所处的运行阶段输出三相端电压.4SRM控制系统CME某S-函数设计方法Matlab6.5的Simulink环境中,在分析SRM数学模型的基础上,提出了利用CME某S-函数建立SRM图3SRM控制系统仿真建模组成框图SRM双闭环控制系统主要由6个功能模块组成,利用CME某S-函数的三类简化结构,编写程序实现模块功能.其中:①电机本体模块,描述SRM机理特性,具有连续采样时间和连续状态,采用7输入4开关磁阻,论文,DSP,控制第2期纪志成,薛花:基于Matlab的开关磁阻电机控制系统仿真建模新方法5输出的B结构;②速度控制模块,实现PI控制策略,具有离散状态,采样时间1m,采用2输出1输出的C结构;③电流控制模块,实现APC和CCC的复合控制,具有连续采样时间,无状态向量,采用4输入3输出的A结构;④转角选择模块,实现电机运行状态的选择功能,无状态向量,采样时间1m,采用1输入1输出的A结构;⑤参数计算模块,求取电压平衡方程中的运算参量,无状态向量,采样时间0.1m,采用6输出3输出的C结构;⑥电压逆变模块,描述逆变功能,具有连续采样时间,无状态向量,采用3输入3输出的A结构.结构A为CME某S-函数的最简架构,结构B、C是结构A的拓展.模块的输入、输出间为简单的直馈关系,无连续或离散状态向量时,可采用结构A编写CME某S-函数;当需实现一个连续系统时,首先在结构A的基础上,对结构B模板中的mdlInitilizeSize子函数做适当修改,包括对连续状态个数、状态初始值和采样时间的设置等,还需编写mdlDerivative子函数,对于多变量系统,系统结构向量返回的是所有连续状态的导数,最后在mdlOutput子函数中对系统输出方程做一修改;当需实现一个离散系统时,首先在结构A的基础上,对结构C模板中mdlInitilizeSize子函数的离散状态个数、状态初始值和采样时间等设置做适当修改,然后编写mdlUpdate和mdlOutput子函数,分别输入要表示的系统离散状态方程和输出方程.三类简化结构简单实用,有效实现了易编、易改、易理解的编程原则,确保了设计效率与质量.5仿真结果本文基于Matlab/Simulink建立了6/4三相SRM控制系统的仿真模型,并对该模型进行了双闭环控制方式的仿真实验.SRM参数为:电机相电压Ud=300V,最大相电流I0ma某=10A,相绕组电阻R=1.5Ω,定、转子极弧β=βr=30°,饱和时的最大磁通Ψma某=0.8Wb,最小磁通Ψmin=0.16Wb,磁化曲线转折处对应电流值i=2A,转动惯量J=0.002kg·m2,额定转速ne=500rad/,极对数np=2.为了验证所设计的SRM控制系统仿真模型的静、动态性能,系统空载起动,进入稳态运行后,在t=0.3时参考转速由500rad/突变为150rad/,在t=0.5时突加负载转矩Tl=8N·m,在t=0.6时卸载至1N·m,同时参考转速由150rad/突变为700rad/,稳态t=0.8时再突增负载转矩至3N·m,可得系统转速、转矩、a相电流、a相电压波形如图4~7所示.由仿真波形分析可得:在ne=500rad/额定转速下,系统响应快速且平稳,相电流和相波形较为理想,参考电流的限幅作用十分有效;空载稳速运行时,参考转速由500rad/突降至150rad/,电机工作在CCC方式下,再突增为700rad/后,电机工作在APC方式下,突变过程中电机实际转速始终能迅速跟踪给定,超调小,无静差,说明系统反应快速,具有较高的控制精度;在t=0.5,0.6,0.8时突变负载转矩,电机转速有小跳变,但能够快速回复至平稳运行状态,说明系统运行特性对参数扰动有较强的鲁棒性.仿真结果证明了这种新型的基于CME某S-函数SRM仿真建模方法的有效性.)/dar(wW/(rad·-1)t()图t/开关磁阻,论文,DSP,控制6浙江万里学院学报2005年4月Ua/V)V(aUia/A)A(ait/t()t()t/图6a相电流波形图7a相电压波形5结论本文在分析SRM数学模型的基础上,提出了一种基于CME某S-函数仿真建模的新方法.将该方法应用于Simulink环境下SRM控制系统模型的设计,采用经典的速度、电流双闭环控制方法对该建模方法进行了测试,仿真实验结果表明:波形符合理论分析,系统能平稳运行,具有较好的静、动态特性.采用简单明了的三类CME某S-函数简化结构,使得实现、验证控制算法十分便捷,改换或改进控制策略十分简易,只需对部分编程语句进行修改即可实现功能模块的更新或替换.特别的是,与m文件S函数建模和框图建模相比,结合了C语言优势的S-函数仿真速度最快,而且可实现对操作系统和硬件访问的特点,使得该方法为设计和调试实际SRM控制系统提供了有效的手段和工具.。
Ansys(Ansoft)MaxwellRMxprt电机仿真入门详细教程

Ansys(Ansoft)MaxwellRMxprt电机仿真入门详细教程最近课题需要使用ANSYS对三相交流感应电机进行一些仿真,关于ANSYS分析的资料网上很多,但感觉对于新手来说最麻烦和最艰难的还是刚开始那个阶段。
之前在网上搜索了一下感觉也没有非常傻瓜的入门教程,后来在外网上找到一个不错的教程(电机建模,电机分析),在这里以文字的方式进行分析总结一下。
在教程中使用的ANSYS版本是18.2,因为需要进行电磁仿真,所以还需要另外安装相应版本的Ansys Electronics Suite。
才能使用教程中的Maxwell和RMxprt模块。
接下来对整个步骤做一下详细的说明。
整个分析过程主要包括两部分:(1)在RMxprt快速建立三相交流电机的仿真模型(2)对模型进行分析(1)建立电机模型Step1:打开ANSYS workbench,并从软件左边拖拽一个RMxprt分析模块到右侧活动窗口,随后双击Setup进入ANSYS电气分析模块。
Step2:在软件左侧项目管理的窗格内,右键点击RMXprtDesign1并在弹出的对话框中选择感应电机。
Step3:随后单机页面上的添加求解步骤按钮,按下图所示设置电机的相关额定参数。
Step4:双击左侧项目栏中的Machine分支,如退所示设置电机的一些基本信息Step5:双击左侧任务栏里的Stator分支,俺如果所示设置定子参数,随后双击Stator目录下的Slot项目,在弹出的菜单栏中取消勾选Autodesign,随后再次双击SLot分支,如图所示设置定子相关参数。
Step6:双击左侧项目栏中Stator分支下的Winding,如下图所示对电机定子绕组进行参数设置Step7:接下来同理先双击Rotor进行转子参数设置,双击Rotor Slot进行转子槽设计,双击Winding进行转子绕组设计Step8:双击左侧任务栏中的Shaft,对电机轴的参数进行设定Step9:完成以上电机参数设置后可以选择页面上的Validate按钮进行参数检查,没有问题的话可以保存,随后点击选项栏里的Analyze All 和 Solution Data,可以查看点击查看所构造点击的一些基本参数。
基于Maxwell的四相开关磁阻电机的设计

基于Maxwell的四相开关磁阻电机的设计
瞿广宇;刘伟;杨湄
【期刊名称】《微特电机》
【年(卷),期】2016(44)9
【摘要】由于当今开关磁阻电机所具备的众多优势,对于开关磁阻电机的研究以及模拟方真势在必行.但介于开关磁阻电机的高成本性,利用Ansoft 14软件对其进行模拟仿真及相关优化分析非常有必要.针对中高速的8/6级四相开关磁阻电机进行仿真,分析其工作特性、相关参数规律以及相比于三相开关磁阻电机的优势.在得到相关数据后给出具体的优化建议以及电机今后需要改进的方向,为今后对四相开关磁阻电机提供有效且准确的参考.
【总页数】4页(P58-60,64)
【作者】瞿广宇;刘伟;杨湄
【作者单位】成都理工大学,成都610059;成都理工大学,成都610059;西华大学,成都610039
【正文语种】中文
【中图分类】TM352
【相关文献】
1.基于Rmxprt与Maxwell2D的开关磁阻电机特性仿真 [J], 江华
2.基于Maxwell2D的开关磁阻电机特性仿真研究 [J], 邱银;郝润科;赵龙;王磊;祖军
3.基于Maxwell和Simplorer8/6极开关磁阻电机绕组短路故障分析与研究 [J], 肖丽;孙鹤旭;张培培;刘卫鹏
4.基于Ansoft/Maxwell 2D的开关磁阻电机起动性能仿真分析与实验研究 [J], 杨泽斌;黄振跃;张新华
5.基于Maxwell2D的开关磁阻电机特性仿真 [J], 邱银;郝润科;赵龙;王磊
因版权原因,仅展示原文概要,查看原文内容请购买。
基于Maxwell 3D的开关磁阻平面电动机仿真研究
基于Maxwell 3D的开关磁阻平面电动机仿真研究陈燕;马春燕;王振民;李更新【期刊名称】《微电机》【年(卷),期】2009(042)007【摘要】开关磁阻平面电动机结构简单、运行可靠,但其双凸极结构使磁路非线性非常严重,给磁路分析乃至控制带来很大困难.利用Maxwell 3D电磁场分析软件,采用有限元方法对开关磁阻平面电机进行静态电磁特性仿真分析;绘制出电磁推力特性曲线和磁链特性曲线.仿真结果可以用于指导该电机及其控制系统的设计和优化.%Switched reluctance planar motor (SRPM) is a kind of novel machine, which have the ad-vantages of simple structure and reliable operation. However, its dual-salient pole structure lead to mag-netic circuit nonlinear very seriously, and bring great difficulties to magnetic circuit analysis as well as control. In this paper, analyzed the static electromagnetic characteristics by using the finite element a-nalysis software Maxwell 3D, mapped the curve of electromagnetic force and flux linkage ultimately. The results of simulation can be available to design and optimize this new type of machine and its control sys-tem.【总页数】3页(P13-15)【作者】陈燕;马春燕;王振民;李更新【作者单位】太原理工大学信息工程学院,太原,030024;太原理工大学信息工程学院,太原,030024;太原理工大学信息工程学院,太原,030024;太原理工大学信息工程学院,太原,030024【正文语种】中文【中图分类】TM352【相关文献】1.基于Maxwell2D的开关磁阻电机特性仿真研究 [J], 邱银;郝润科;赵龙;王磊;祖军2.基于Ansoft/Maxwell 2D的开关磁阻电机起动性能仿真分析与实验研究 [J], 杨泽斌;黄振跃;张新华3.基于Ansoft Maxwell 2D的开关磁阻电机仿真研究 [J], 周会军;丁文;鱼振民4.Maxwell 3D在开关磁阻平面电机结构设计中的应用 [J], 李更新;马春燕;陈燕;王振民5.基于Maxwell 2D的开关磁阻电动机的仿真研究 [J], 周会军;丁文;鱼振民因版权原因,仅展示原文概要,查看原文内容请购买。
基于Maxwell2D的开关磁阻电机特性仿真

基于Maxwell2D的开关磁阻电机特性仿真邱银;郝润科;赵龙;王磊【摘要】采用Ansoft公司的RMxprt和Maxwell模块建立了开关磁阻电机的二维模型,并对其进行了有限元分析,得到了开关磁阻电机运行时的转矩、电流、功率等特性曲线,并且通过不同导通角的比较找到了电机运行时转矩脉动较小的控制角,这些工作为电机的实际运行控制提供了依据.%A two-dimensionnal model of the switched reluctance motor was established by using RMxprt and Maxwell2D from Ansoft corporation. Through finite element analysis of this SRM the torque, current, power curve of the switched reluctance motor were given at the run-time. By comparing different conduction angle, could get the control angel at which the motor' s torque ripple was smaller. All this work provided a basic foundation for the actual operation of the motor control applications.【期刊名称】《电机与控制应用》【年(卷),期】2012(039)010【总页数】5页(P5-8,18)【关键词】开关磁阻电机;有限元分析;特性分析【作者】邱银;郝润科;赵龙;王磊【作者单位】上海理工大学光电信息与计算机工程学院,上海200093;上海理工大学光电信息与计算机工程学院,上海200093;上海理工大学光电信息与计算机工程学院,上海200093;上海理工大学光电信息与计算机工程学院,上海200093【正文语种】中文【中图分类】TM3520 引言开关磁阻电机驱动系统是一种新型的机电一体化驱动装置,由开关磁阻电机(Switched Reluctance Motor,SRM)、功率变换器、位置传感器、控制器四个部分组成,具有结构简单,性能优越,调速性能可靠等优点,在电动车驱动、家用电器、航空工业等领域都有很好的应用前景。
rmxprt与maxwell2d电机铁芯长度的转换关系

rmxprt与maxwell2d电机铁芯长度的
转换关系
RMxprt(Rotor Model eXpert)和Maxwell 2D都是ANSYS公司的电机设计与仿真软件。
在电机设计中,铁芯长度通常是电机的一个重要参数之一。
由于RMxprt和Maxwell 2D是不同的工具,它们的数据格式和模型表示方式可能有所不同。
在一般情况下,这两个软件的转换关系并不是直接的线性关系,因为它们是用于不同目的的工具。
如果你想在两者之间进行数据转换,通常需要详细了解每个软件的模型和数据表达方式。
你可能需要参考各软件的文档或者联系ANSYS的技术支持来获取具体的转换方法和公式。
请注意,这样的转换可能是复杂的,因为这涉及到不同工具中模型的物理表示和求解方法的差异。
最好的方法是直接咨询ANSYS的技术支持或参考相关的文档和手册。
1/ 1。
基于MATLAB的开关磁阻电机调速系统的建模与仿真

1.3当前的主要研究热点和发展方向
开关磁阻电动机调速系统同样也存在一些自身的不足和缺点,这主要表现在以下几个方面:
(1)系统采用的是磁阻式电动机,其能量转换密度低于电磁式电动机。
(2)开关磁阻电动机运行时转矩脉动较大,通常转矩脉动的典型值为±15%,由转矩脉动导致的噪声问题以及待定频率下的谐振问题也较为突出。
(4)起动转矩高,启动电流小
(5)可控参数多,调速性能好
(6)适用于频繁启动、停车以及正反转运行
(7)效率高,损耗小
开关磁阻电动机调速系统作为一种新型的调速系统,兼有直流传动和普通交流传动的优点,以向各种传统调速系统挑战的势头正在逐步应用在家用电器、一般工业、伺服与调速系统、牵引电动机、高速电动机、航天器械以及汽车辅助设备等领域,显示出强大的市场竞争力。
2.2开关磁阻电动机介绍
开关磁阻电机(SR电机)的基本结构及基本原理的提出可追溯到19世纪40年代,那时的电机研究人员已认识到利用顺序磁拉力使电机旋转是简单易行的,但由于电机的运行特性(效率、功率因数、利用系数等)很差,仅应用于少数小功率场所,因而一直没有引起人们的研究兴趣。直到20世纪60年代,大功率晶闸管投入使用,为开关磁阻电机的研究和发展奠定了重要的物质基础。
2.3.2国内研究
从1984年开始,我国许多单位先后开展了SR电机的研究工作,如北京纺织机电研究所、南京航空航天大学、东南大学、福州大学、华中理工大学、华南理工大学、河海大学、合肥工业大学、哈尔滨电工学院、南京调速电机厂、西安微电机研究所、上海电科所、上海中达一斯米克公司等,且开关磁阻电机调速系统的研究被列为中小型电机“七五科研规划项目”。在借鉴国外经验的基础上,我国SR电机调速系统的开发研究起点较高,目前各单位都集中于较优的三相和四相控制方案,至今国内已有十余家单位推出不同性能、不同用途的从1kw至55kw等多种规格的系列产品,应用于纺织、冶金、机械、运输等行业的数十种生产机械和交换器是SRD系统能量传输的关键部分,是影响系统性能价格比的主要因素,由蓄电池或交流电整流后得到的直流电提供电源,起控制绕组开通与关断的作用。由于SR电机绕组电流是单向的,使得功率变换器主电路不仅结构简单,而且相绕组与主开关器件是串联的,可以避免直通短路危险。但是合理选择和设计功率变换器是提高SRD的性能价格比的关键之一,功率变换器主电路形式的选取对SRM的设计也直接产生影响。SR电机的功率变换器主电路的结构形式与供电电压、电动机相数及主开关器件的种类有关。
Rmxprt+Maxwell 2d+Maxwell 3d完成BLDC仿真

Rmxprt+Maxwell 2d+Maxwell 3d完成BLDC仿真作者:saleing 完成日期:2010 年1 月8 日自学ansof这个软件有一段时间了,第一次做BLDC电机的仿真,本人还是菜鸟级别,还不知道结果对不对呢!特把仿真过程发上来大家一起探讨。
在此要特别感谢“欧阳庆”、“y1949b”以及帮助过我的前辈们,你们真的很棒!一、首先用rmxprt进行建模及初步设计因比较简单,所以具体的尺寸就不一一列出,直接出结果。
二、创建maxwell 2d模型及分析Auto step必须勾选设置机械运动选项设置setup其它设置保持默认就可以了,下面开始仿真,时间大约20分钟就可以出结果。
力矩波形相电流转速感应电动势磁链磁通磁场强度三、创建3D模型及分析Modeler——Export——指定路径——打开创建OuterRegion、InnerRegion、Band。
选中Band进行运动设置(初始角7.5度,衡速在额定转速下,主要看你要仿真起动、空载还是额定)设置主边界设置辅边界ZeroTangentialHField边界激励设置:对先线圈进行截面提取,有两个截面的要分离设线圈匝数(和rmxprt一致)Add winding(选择用外电路方式)定义外电路(和2d的外电路一样,就用2D的外电路)Setup设置(和2d差不多)Analysis(用了差不多24个小时,啊!很郁闷)结果(步长不是很密,所以曲线看起来不是很正常)到此,仿真真结束!请大大家一起探讨,互相学习!Saleing 2009年1月8日。
基于Ansoft的永磁同步发电机建模与仿真
酗删如咖理论与设计基于Ansoft的永磁同步发电机建模与仿真朱少林王群京合肥工业大学(230009)ModelingandSimulationofPermanent—magnetSynchronousGeneratorBasedonAnsoftZhuShaolinWangQunjingHefeiUniversityofTechnology摘要:利用Ansoft软件中的RMxprt和Maxwell2D模块建立了永磁同步发电机(PMSG)的系统仿真模型。
通过对PMSG模型进行瞬态仿真,得到它的反电动势曲线、相电流曲线以及气隙磁密分布曲线。
仿真结果为永磁同步发电机的进一步优化设计提供了理论依据。
关键词:永磁同步发电机Ansoft瞬态仿真Abstract:Asimulationmodelofpermanent-magnetsynchronousgenerator(PMSG)waspresentedusingRMxprtandMaxwell2DmoduleofAnsoft.Theback-emfcurve.phasecurrentcurveanddistributionoftheairgapmagneticf1UXdensitycurvewereobtainedbythetransientsimulationonthePMSG.TheresultsofsimulationprovidedtheoreticalfoundationfortheoptimizationdesignofPMSG.Keywords:PMSGAnsoftTransientsimulation与电励磁同步发电机相比,永磁同步发电机具有结构简单、运行可靠、体积小、质量轻、损耗小、效率高、电机的形状和尺寸可以灵活多样等显著优点。
随着永磁材料性能的不断提高和完善,特别是铷铁硼永磁材料的热稳定性和耐腐蚀性的改善,价格的逐步降低,以及电力电子器件的进一步发展,永磁同步发电机在国防、工农业生产和日常生活等方面获得了越来越广泛的应用。
基于Magnet的直线开关磁阻电机仿真研究

MA Q n —ig H N G A u nfn igqn ,S A G U N X a - e
( e a o t h i U i ri ,J ou 5 0 3 hn ) H n nP l e n n esy i zo 4 0 ,C ia yc c v t a 4
Ab t a t T i p p ri t d c st e mo e i g o ie r s t h d r l ca c tru i g Ma e fI f - s r c : h s a e n r u e h d l fl a wi e eu t n e mo o s g to o o n n c n n n lt a c r o a in T e b s e o ma c s f S y i o p r t . h a i p r r n e RM r n l z d b s d o e mo e . w ih i cu e t e c o c f o L ae a ay e a e n t d 1 h h c n l d h
d srb to fma e i ed a h lg e n n l n d ta l trp st n, sai l cr ma n tcc a - it u i n o g t f l tt e ain d a d u a i e r nsao o i o i n ci g i t t ee to g e i h r c a trsisa d d na c smu a in r s ls Alo t e p pe n y n u n e o ifr n p n d lc to ce it n y mi i lto e u t. c s h a ra a s if e c fd fe e to e e o ains l l a d t r o o ain o tro y a cpe o a c . T e r s lst i l t n c n b v ia l o d — n u n.f lc to fmo o n d n mi r r n e f m h e u t o smu ai a e a alb e t e o sg n p i z h sn w y e ma h n n o to y tm. in a d o tmie t i e tp c i e a d c n r ls se Ke o d y W r s: L RM ; Ma ne ; Si l t n S g t mu a i o
基于AnsoftMaxwell2D的开关磁阻电机仿真研究

基于A n soft M axw ell 2D 的开关磁阻电机仿真研究收稿日期:2004-11-22修回日期:2005-10-08周会军 丁文 鱼振民(西安交通大学电气工程学院,西安,710049)摘 要:基于A nsoft M axw ell 2D 的仿真环境,建立了开关磁阻电动机(SRM )的系统仿真模型。
在建立仿真模型基础上,对电动机的基本特性进行了仿真研究,获得了电机不同位置时的磁场分布、静态电磁参数和动态性能仿真结果。
仿真结果可以用于指导该型电机及其控制系统的设计和优化。
关键词:开关磁电动机;A nsoft 软件;M axw ell ;2维磁场中图分类号:TM 352 文献标识码:A 文章编号:1001-6848(2005)06-0010-03Si m ula tion and Ana lysis of Switched Reluctance M otorZHOU H u i -jun ,D I N G W en ,YU Zhen -m in(Shoo l of E lectrical Engineering ,X i’an J iao tong U niversity ,X i’an ,Ch ina )Abstract :T h is paper introduces the modeling of s w itched reluctance mo to r using M axw ell 2Dof A nsoft co rpo rati on .T he basic perfo r m ances of SRM are analyzed based on the model ,w h ich include the distributi on of m agnetic field at the vari ous ro to r po siti on ,static electrom agnetic characteristics and dynam ic si m ulati on results .T he results o si m ulati on can be available to design and op ti m ize th is new type m ach ine and contro l system .Key words :SRM ;A nsoft ;Si m ulati on ;M axw ell 2D0 引 言开关磁阻电机驱动系统由电机本体(Sw itchedR eluctanceM o to r ,简称SRM )、功率变换器、位置传感器和控制器4部分组成[1]。
基于RMXPRT和MAXWELL的永磁同步电动机优化设计

基于RMXPRT和MAXWELL的永磁同步电动机优化设计
基于RMXPRT和MAXWELL的永磁同步电动机优化设计殷进省;江赛标;王文博
【期刊名称】《电机技术》
【年(卷),期】2011(000)004
【摘要】利用基于磁路法的RMXPRT软件对一款50kW、200V 的永磁同步电动机方案进行优选,得到较为理想的电机方案后将其导入到电磁场有限元分析软件MAXWELL进行优化计算.算法选用遗传算法,以永磁同步电动机的极弧系数、极弧偏心距和永磁体厚度作为优化变量,以气隙磁密、齿槽转矩和永磁体面积作为优化目标.优化后效果明显,对实际应用具有一定的指导意义.
【总页数】3页(5-7)
【关键词】永磁同步电动机;Maxwell;有限元分析优化设计
【作者】殷进省;江赛标;王文博
【作者单位】广东工业大学,510006;广东工业大学,510006;广东工业大学,510006
【正文语种】中文
【中图分类】TM302
【相关文献】
1.基于感应电动机的自起动永磁同步电动机设计[J], 阮天虎; 夏永明; 潘海鹏
2.电动机的高效率化技术——适用于全封闭异步电动机和永磁同步电动机的节能技术 [J], 邓隐北; 赖诚明; 黄起金
3.基于Maxwell2D的永磁同步电动机磁极优化设计 [J], 唐先全
4.基于遗传算法的永磁同步电动机优化设计 [J], 石有计。
基于Maxwell 2D的开关磁阻电动机的仿真研究

才能真实地仿真S M R 的性能, 获得更真实的S M R 瞬 ; 军 态性能, 并为电 机驱动系统的 设计和优化提供依据。 : 营 利用M xe awl2 lD建立S M二维有限元模型, ; R 建 薹
模 过程 如下 : i 吕
2系统仿真模 型的建立
2 1S M 工作 原 理 和仿真 模 型 . R
维普资讯
…
蔓 堕 … . … … … … …… … …… … …… … … 皇 苎
一一
基 于 Ma w l2 的开 关 磁 阻 电动 机 的仿 真 研 究 x e D l
周会 军 , 丁 文 , 振 民 鱼
( 西安交通大学 , 陕西西安 70 4 ) 109 摘 要: 基于 Maw l2 x e D的仿真环境 , l 建立 了开关磁阻电动机 ( R 的系统仿 真模 型 , 开关磁 阻电动机 的基 S M) 对
服系统 各个 领域 , 盖功 率 范 围 1 ~ 覆 0w 5 MW 的各
序地 给各 相定 子 绕组 通 电 , 可 以产 生 持 续 的 电磁 就 转矩 , 使转 子旋 转 。 而
-c Ⅱ
; i i
种 高低 速驱 动 系统 , 呈现 强 大 的市 场 潜力 。
帚 tp/ tI 《《W. oo / T
Байду номын сангаас
由于开关 磁 阻 电动机 、 功率 变换 器 、 控制 器 三者
A sf公 司 的 Maw l2 是一 个 功 能 强 大 、 not x e D l 结
之 间 的强耦合 特 征 , 只有使 S M在 外 电路 的控 制 下 R
果精 确 、 易于 使 用 的 二 维 电磁 场 有 限元 分 析 软 件 。 本 文 采用 Maw l2 x e D软件 建立 S M 模型 , l R 功率 变换 器模 型 和驱动 电路 模 型 , 完成 了开 关 磁 阻 电动 机 驱 动 系统 的仿真 研究 。
Maxwell仿真永磁同步电机步骤

Ansoft Maxwell 14 永磁同步电机仿真步骤总结
首先是建立一个RMxprt文件,选择电机类型为下图的
Permanent-MagnetSynchronous Motor
只要按照下面的参数输入即可
磁钢材料NTP264H要自己定义
Danper是怎么出来的?要右键”Rotor’ ,选择Insert Danper,就可以了
所有参数输入完毕,现在要定义个求解设置,右键“Analysis”添加一个setup,
模型
绕组的连接如下
求解结果
一键导入到maxwell14 2D瞬态场里去分析即可,右键Analysis setup 的creat Maxwell design ,auto setup 要打勾
导入模型如图,是1/4模型(导入整个模型的方法?加注fragnet 1)
因为是1/4模型,所以要设置一个Symmetry Multiplier ,右键”model”,就可以看
到,设置如下
电机在零负载转矩的起动:点击“model”的树,将其展开,双击Motion setup 作如下设置
为了得到,更好的仿真图像,设置一下仿真时间,双击Solve setup 作如下设置
以下就是在零负载转矩的情况下的得出的各种起动时间图,横轴的时间单位是毫秒(ms)
做完了以上的仿真,再做一个电机在额定负载下的起动过程,把上面的文件复制一下,然
后改一下名称,结果如图然后双击负载的那个,改一个参数就可以,要改的参数,在motion setup里(上面有提到过的)将load Torque 设置成如下就可以,然后开始让电脑开始仿真(Analys all)
结果的图如下。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
( 西安科技 大学 电气 与控 制 工程 学 院 , 陕 西西安 7 1 0 0 5 4 )
摘 要 在A n s o f t 机 电系统 R m x p r t 模 块 中建 立了 S R M 的二维模 型 , 且在 R m x p r t 中仿真 , 得 到了开关磁阻 电机 的相 电流 、 转矩 、 功率、 效 率等特 性曲线 , 得 出了 电机在 额定 转速下 效率最 高输
出功率却不是最大的结论 ; 并将 其导入 Ma x w e l l 2 D 中, 在X Y平面 中 , 对 模型分 组 、 材 料设 置 、 边 界 及激励源设置等相关设置后 , 做 了进一步 的基于瞬 态场 的有限 元分析 , 得到 了 电机在 不 同时刻 的 磁力线 、 磁通 密度 、 磁密矢量等信息 ; 最后通 过对 比两个仿 真结果 , 再次 验证 了此建模 仿真方法 的
第 第卷 4 9 ( 盖 总 薯 第 6 1 8 1 期 1 ) ( E X P L O S I O N - P R O O F E L E C T R I C M V I A C H I N E ' )
爆' 琳 龟 机
基于 R m x p r t 与M a x w e l l 2 D的开关磁阻 电机特性仿真 木
通常 由功 率变 换 器 、 开关 磁 阻 电机 ( S w i t c h e d R e — l u c t a n c e Mo t o r , S R M) 、 位置检 测 装置 、 电流 检 测装 置及 控 制器 五个 部 分组 成 。S R M凭着结构简单 、 运行 稳定 、 调 速 范 围宽 等 优 点 使 其迅 速 成 为调 速
r a t e d s p e e d b u t o u t p u t p o we r i s n o t . By i mp o r t i n g t h e mo d e l t o Ma x we l l 2D ,r e l e v a n t s e t t i n g s s u c h a s mo d e l g r o u p i n g we r e ma d e,ma t e ia r l s e t t i n g,b o u n d a r y a n d e x c i t a t i o n s o u r c e s e t t i n g a n d f u r t h e r in f i t e — e l e me n t a n a l y s i s o n t h e b a s i s o f t r a n s i e n t i f e l d wa s c a r r i e d o u t ,t h e n ma g n e t i c ie f l d l i n e,f lu x d e n s i t y,f l u x d e n s i t y v e c t o r a n d o t h e r i n f o r ma t i o n we r e o b t a i n e d . At l a s t ,i t v e r i ie f d v a l i d i t y o f t h i s s i mu l a t i o n mo d e l i n g me t h o d b y c o mp a r i n g t h e t wo s i mu l a t i o n r e s u l t s ,a l s o p r o — v i d e e f f e c t i v e t h e o r y f o u n d a t i o n f o r f u th r e r a n a l y s i s a n d c o n t r o l or f S RM . Ke y wo r d s S wi t c h e d r e l u c t a n c e mo t o r : Ma x we l l 2 D; i f n i t e . e l e me n t a n a l y s i s ; n o n l i n e a r
1 基于 A n s o f t / R mx p r t 的 仿 真
1 . 1 R m x p r t 中模 型 的建 立
R m x p r t 为旋转 电机设计软 件 , 而 Ma x w e l l 2 D
是一种功能强大 、 结果准确的二维电磁场有 限元 分析软件 , 其中有高性能的矩阵求解器和 多 C P U 处 理能 力 。Ma x w e l l 2 D的瞬 态 求 解 器 能 同 时 求解
和是 其两大 特征 , 这给 S R M 数学 模 型 的建 立 带来
了很 大 的困难 。而 有 限 元法 为 当今 各 类 电磁 场 、 电磁 波工程 问题定量 分析 与 优化 设计 的主 导 数值 计算方 法 , 本 文利 用 A n s o i机 电 系统 ( f 包含 R m x — p r t 、 Ma x w e l l 2 D、 Ma x w e l l 3 D) 的R m x p r t 模块对 S R M
本身 性 能 进 行 研 究 , 在 有 限 元 方 法 的基 础 上 在 Ma x w e l l 2 D中对 S R M 的瞬 态性 能进 行 了进 一步 的 分析 , 两大 模块 中的仿真 结果 一致 , 与理 论 规律 和 经验 数据相 符 合 。
系统 中的一员, 并且在煤炭工业 、 油田、 机床设备 、 家 用 电器 等领 域都 得 到了很 好 的应用 ¨ 。
mo d u l e o f An s o i f e l e c t r o me t r i c a l s y s t e m. Th e c h a r a c t e r i s t i c c u r v e s o f p h a s e c u r r e n t ,t o r q u e,
0 引言
开 关磁 阻 电机 驱 动 系统 ( S w i t c h e d R e l u c t a n c e Mo t o r D r i v e r , S R D) 是一种新型的调速驱动装置 ,
复杂 系统 , 绕 组 电流 的非 线 性 与 铁 心磁 通 的高 饱
中图分类号 : T M3 0 1 . 2; T M 3 5 2 文献标识码 : A 文章编号 : 1 0 0 8 - 7 2 8 1 ( 2 0 1 4 ) 0 6 4 3 0 2 4 - 0 0 5 Cha r a c t c r i s t i c Si mu l a t i o n o f Swi t c h e d Re l uc t a n c e Mo t o r Ba s e d o n
Rm x p r t a n d Ma x we l l 2 D
J i a n g h u a ( S c h o o l o f E l e c t i r c a l a n d C o n t r o l E n g i n e e i r n g , X i ’ a n U n i v e r s i t y o f S c i e n c e a n d T e c h n o l o -
性 的特征 。该 曲线 充 分 反映了 开关磁 阻 电机 的 非
而生 成 S R M 的 2 D 模 型 。 本 文 中 选 用 了 四相 8 / 6 的S R M, 主要 参数如 表 1 。
表 1 S R M 基 本 参 数数 据
线性 特征 , 并 且可 以将 得到 的数 据保 存 导 出 , 进行 二次 开发 利 用 。例 如 与其他 的仿 真软 件结 合 进行 仿真 , 文献 [ 3 ] 就是利用 R m x r p t 仿 真 得 到 的 曲线 数据 , 导 入 到 Ma t l a b / S i mu l i n k中仿 真 。文 献 [ 4 ] 同样利 用相 同 的参数 在 A n s o l与 Ma f t l a b中仿 真 , 对 比仿 真结 果 , 验 证 了 此 模 型 的 优 点 。将 使得 电
驱 动 电路选 用三 相 不对 称 桥 式 驱 动 电路 , 该
机 的 仿 真 对 象 不 仅 仅 限 于 Ma t l a b 系 统 自 带 的 S R M模型 , 用 户可 以将 系统 自带 的模 型 数 据 替换 成 自己需要 仿真 的 电机模 型数 据 。 图 2与图 3分 别 为输 出 功 率与转 速 的关 系曲 线 和效率与 转速 的 关 系 曲线 图 。图 2中可 以看 出 当转 速 在 6 3 0 r / m i n左 右 时 , 输 出 功 率最 大 , 将 近 6 4 0 W。而 实际上 电机 的额定转速 为 1 5 0 0 r / m i n , 很
磁场 、 电路 及运 动 等强耦 合 的方程 , 可 以轻 而 易举 的解 决 S R M 性 能 分 析 问题 。本 文 就 是 在 R mx p r t
中建 立 S R M 的几何 模 型 然 后 导 Ma x w e l l , 铁心磁通也已饱 和, 磁链 的增 加 有 限 , 该 图充分反映出 S R M 非线
p o we r a n d e f f i c i e n c y we r e g o t ,a n d c o n c l u s i o n t h a t e f f i c i e n c y o f t h e mo t o r i s ma x i mu m u n d e r i t s
转子 位置 角 的增加 , 磁链 也 随着 增加 ; 当电流 处于 较大 值时 , 磁链 增加 量 变小 , 曲线 变密 。而 当转 子 位置 角 不变 时 , 随 着 电流 的增 大 , 磁 链 明显 增 加 , 当电流增 加 到一定 值 时 , 磁链 增加 的速 度 变慢 , 曲 线 的斜 率变小 。实 际 上 , 在 电流较 小 时 , 铁 心 磁通 未饱 和 , 绕 组 电流近 似 线性 增加 , 磁链 与 电流 的平 方成 正 比 , 故起 动 阶段 磁链迅 速 上升 , 当电流 增加