TSP问题综述及相应求解算法研究
PSO_TSP问题综述
科技论坛PSO-TSP 问题综述傅刚(福州职业技术学院,福建福州350001)1TSP 问题介绍旅行商问题(Traveling Salesman Problem )是一个典型的组合优化问题,旅行商问题描述如下:给定n 个城市及两两城市之间的距离,求一条经过各城市一次且仅一次的最逗路线。
其图论描述为:设给定带权图G=(V ,E ),其中V 为顶点集,E 为各顶点相互连接组成的弧集,已知各顶点间连接距离,要求确定一条最短Hamil -ton 回路,即遍历所有顶点一次且仅一次的最短回路。
设dij 为城市i 与j 之间的距离,即弧(i ,j )的长度,引入变量:x ij1,若旅行商访问城市i 后访问城市j ;0,否则。
则TSP 的目标函数为minZ=ni ,j=1Σx ij d ijTSP 问题的求最优化解是很困难的。
对于有着n 个城市的TSP 问题,存在着(n-1)!/2条可能的路径。
随着城市数目n 的增长,可能路径的数目以n 的指数倍增加,如果使用穷举法搜索,需要考虑所以的可能情况,并两两比较,找出最优解,那么可搜索的路径及其距离之和的计算量将正比于n!/2,算法的复杂度呈指数增长,人们把这类问题称为“NP 完全问题”。
由于TSP 具有实际应用价值,例如:城市管道铺设优化、物流等行业中的车辆调度优化、制造业中的切割路径优化以及电力系统配电网络重构等现实生活中的很多优化问题都可以归结为TSP 模型来求解,目前TSP 应用的一个重要方面就是无人飞机的航路设计问题,即事先针对敌方防御区内的威胁部署和目标的分布情况,对无人作战飞机的飞行航路进行整体规划设计,可以综合减小被敌方发现和反击的可能性、降低耗油量,从而显著提高UCAV 执行对地攻击(或侦察)任务的成功率。
目前求解TSP 的主要方法有最近邻域搜索算法、模拟退火算法、遗传算法、Hopfield 神经网络算法和蚁群算法等。
本文主要介绍用粒子群优化算法解决TSP 问题及其各种改进方法。
TSP问题的几种常用求解算法比较共3页
TSP问题的几种常用求解算法比较旅行商问题(Traveling Salesman Problem, TSP)是典型的组合优化问题,很多优化问题都可以直接或间接的转为为TSP问题,而且TSP问题已被证明具有NPC计算复杂性,有很大的求解难度,因此研究TSP问题的求解方法有着很大的实际意义。
本文旨在介绍求解TSP的几种常用解法,并结合实例比较这些算法的性能,为TSP的求解提供一些参考。
1 TSP问题描述TSP问题的数学表述为:一个有穷的城市集合C={C1,C2,…,Cm},对于每一对城市Ci,Cj∈C有距离d(Ci,Cj)∈R+。
问:经过C中所有城市的旅行路线,记为序列,是否存在最小的正数B,对所有可能的序列都有2 TSP问题几种常用求解方法TSP问题有着很多求解算法,主要有。
2.1 贪婪算法贪婪算法[2](Greedy algorithm)是求解大规模TSP问题的常用算法之一,是一种求解优化问题的简单、迅速的求解办法。
贪婪法有限考虑当前情况下最优的优化测度,自顶向下,逐步迭代,具有算法简单,耗时短的特点。
但贪婪算法的求解结果往往不是最优的,甚至可能与全局最优解间有不小的差距。
2.2 模拟退火算法模拟退火(Simulated Annealing,SA)算法是求解TSP问题的有效方法之一,容易编程实现,求解速度快。
模拟退火是一种全局优化算法,加入了随机状态模型,使算法以概率选择的方式逼近最优状态,其收敛性可以得到严格的理论证明。
模拟退火算法具有一整套完整的退火搜索计划,包括足够高的初始温度、缓慢的退火速度、大量的迭代次数及足够的概率扰动[3]。
2.3 遗传算法遗传算法(Genetic Algorithm,GA)是一种常用的智能算法,具有全局搜索能力,对TSP问题有良好的效果。
遗传算法是由Michigan大学的J.Holland教授于1975年提出,算法通常由编码、个体适应度评估和遗传运算三部分构成,其中遗传运算包括染色体复制、交叉、变异和倒位等[4]。
实验六:遗传算法求解TSP问题实验2篇
实验六:遗传算法求解TSP问题实验2篇第一篇:遗传算法的原理与实现1. 引言旅行商问题(TSP问题)是一个典型的组合优化问题,它要求在给定一组城市和每对城市之间的距离后,找到一条路径,使得旅行商能够在所有城市中恰好访问一次并回到起点,并且总旅行距离最短。
遗传算法作为一种生物启发式算法,在解决TSP问题中具有一定的优势。
本实验将运用遗传算法求解TSP问题,以此来探讨和研究遗传算法在优化问题上的应用。
2. 遗传算法的基本原理遗传算法是模拟自然界生物进化过程的一种优化算法。
其基本原理可以概括为:选择、交叉和变异。
(1)选择:根据问题的目标函数,以适应度函数来评估个体的优劣程度,并按照适应度值进行选择,优秀的个体被保留下来用于下一代。
(2)交叉:从选出的个体中随机选择两个个体,进行基因的交换,以产生新的个体。
交叉算子的选择及实现方式会对算法效果产生很大的影响。
(3)变异:对新生成的个体进行基因的变异操作,以保证算法的搜索能够足够广泛、全面。
通过选择、交叉和变异操作,不断迭代生成新一代的个体,遗传算法能够逐步优化解,并最终找到问题的全局最优解。
3. 实验设计与实施(1)问题定义:给定一组城市和每对城市之间的距离数据,要求找到一条路径,访问所有城市一次并回到起点,使得旅行距离最短。
(2)数据集准备:选择适当规模的城市数据集,包括城市坐标和每对城市之间的距离,用于验证遗传算法的性能。
(3)遗传算法的实现:根据遗传算法的基本原理,设计相应的选择、交叉和变异操作,确定适应度函数的定义,以及选择和优化参数的设置。
(4)实验流程:a. 初始化种群:随机生成初始种群,每个个体表示一种解(路径)。
b. 计算适应度:根据适应度函数,计算每个个体的适应度值。
c. 选择操作:根据适应度值选择一定数量的个体,作为下一代的父代。
d. 交叉操作:对父代进行交叉操作,生成新的个体。
e. 变异操作:对新生成的个体进行变异操作,以增加搜索的多样性。
TSP问题的算法与应用的研究

上海大学硕士学位论文TSP问题的算法与应用的研究姓名:张东申请学位级别:硕士专业:计算机应用技术指导教师:赵正德20070101的成败,其流程图如图3.3所示。
经过对数据输入的研究和分析,当前主要有两种输入方式:①在界面上直接输入点阵数据;②将点阵数据以文件的形式保存并上传。
其中第一种方式简单直观,但对用户来说,繁琐且容易出错,所以不建议采用。
第二种方式是本文建议采用的方式,特别是将点阵以excel文件存储,用户可以通过拷贝、导入等多种方式,将点阵数据写入excel文件,节省了很多人力且正确率高。
另外,office软件是电脑装机的必备软件之一,所以excel软件的获取不成问题。
在图3.3中的“数据合法性检查”功能,主要针对以下几点进行检查:①项目名称、点数量和excel数据文件不能为空;②新建项目名称不能与该用户已建立的项目名称重名;匿)excel数据文件中的点数据全部存放在sheetl工作表中,并且每个点的横纵坐标水平排放在单元格中,所有的点数据垂直存放,如图3.4所示;④excel数据文件中的点数量必须与页面上填写的点数量相同;⑤其他数据类型的检查。
图3.4excel数据文件格式4.3系统运行TSP应用实例的一般步骤作为一个TSP应用实例,使用该系统一般需要经过以下几个步骤:①完成系统注册,只有合法的注册用户才能够使用该系统;②将TSP应用实例中需要遍历的点的坐标按3.3节中要求的格式保存在excel文件中;③在新项目输入页面中上传该excel数据文件,并按页面要求输入相关信息,如应用项目名称、在excel数据文件中保存的点的数量等:④在项目输入确认页面对上传的数据进行确认。
若发现上传错误,转到③重新上传数据;若确认执行,系统将给出该应用项目的结果报告单。
⑤用户项目列表页面显示了当前建立的应用项目,提供了对应用项目的再次运行功能、应用项目结果察看功能和删除功能。
4.4实例演示在客户端浏览器输入服务器端URL(UniformResourceLocator),就进入了用户登录页面,如图4.1所示。
tsp问题的memetic求解算法

tsp问题的memetic求解算法TSP问题是指旅行商问题(Traveling Salesman Problem),是一个已知的NP-hard问题。
在TSP问题中,一个旅行商要在一系列城市之间旅行,每个城市之间的距离已知,旅行商需要找到最短的路线,使得每个城市都恰好被访问一次,最后回到起点城市。
Memetic算法是一种将遗传算法(Genetic Algorithm)与局部(Local Search)相结合的元型算法,用于求解最优化问题。
在TSP问题的求解中,Memetic算法可以优化基于遗传算法的随机过程,并通过加入局部操作来进一步提高算法的效率和准确性。
Memetic算法的基本流程如下:1.初始化种群:创建一个初始的候选解集合,每个候选解表示为一个路径序列,通过随机生成一定数量的路径来构建初始种群。
2.遗传算法的操作:通过选择、交叉和变异等操作,生成新的候选解集合。
选择使用适应度函数来评估每个候选解的适应度,并根据适应度进行选择操作。
交叉和变异操作用于生成新的候选解。
3. 局部操作:对每个候选解应用局部操作,以进一步优化候选解。
局部算法可以是简单的2-opt、3-opt等操作,也可以是更复杂的局部算法,如Lin-Kernighan算法等。
4.评估和选择:对新生成的候选解进行评估,并根据适应度函数进行选择操作,保留适应度较高的候选解。
5.终止条件:当满足终止条件时,停止算法,并返回最优解。
Memetic算法的关键之处在于局部操作的设计,局部操作可以根据特定问题的特点进行优化。
对于TSP问题,局部操作可以通过交换两个城市的位置来改进解的质量,以逼近最优解。
通过将遗传算法和局部相结合,Memetic算法能够综合利用全局和局部的优势,减少遗传算法收敛速度慢的问题,并提高算法的求解效率和准确性。
它能够通过遗传算法的全局发现更好的解空间,并通过局部来优化这些候选解,以获得更接近最优解的解。
总结起来,Memetic算法是一种使用遗传算法和局部相结合的元启发式算法,用于求解TSP问题。
TSP问题的解决与实现讲解
TSP问题的解决与实现讲解1. 问题描述所谓TSP问题是指旅行家要旅行n个城市,要求各个城市经历且仅经历一次,并且要求所走的路程最短。
该问题又称为货郎担问题、邮递员问题、售货员问题,是图问题中最广为人知的问题。
2. 基本要求(1) 上网查找TSP问题的应用实例;(2) 分析求TSP问题的全局最优解的时间复杂度;(3) 设计一个求近似解的算法;(4) 分析算法的时间复杂度。
3. 提交报告课程设计报告提交内容包括:(1) 问题描述;(2) 需求分析;(3) 概要设计;(4) 详细设计;(5) 调试分析;(6) 使用说明;(7) 测试结果;(8) 附录(带注释的源程序)。
参见“数据结构课程设计概述.pdf”和“数据结构课程设计示例.pdf”。
指导教师(签字):系主任(签字):批准日期:2014年月日1.问题描述(1)题目要求旅行家要旅行n个城市,要求各个城市经历且仅经历一次,最终要回到出发的城市,求出最短路径。
用图论的术语来说,假如有一个图G=(V,E),其中V是顶点集,E是边集,设D=(d)是由ij顶点i和顶点j之间的距离所组成的距离矩阵。
TSP问题就是求出一条通过每个顶点且每个顶点只通过一次的具有最短距离的回路。
(2)基本要求a. 上网查找TSP 问题的应用实例;b. 分析求TSP 问题的全局最优解的时间复杂度;c. 设计一个求近似解的算法;d. 分析算法的时间复杂度。
(3)测试数据5个城市的TSP 问题:注:由于矩阵所表示的是两个城市之间的距离,所以该矩阵为对称矩阵路程矩阵如图所示:最短路径为v 0v 1v 4v 2v 32.需求分析(1)本程序用于求解n 个结点的最短哈密尔顿回路问题。
(2)程序运行后显示提示信息—“Please insert the number of cities:”,例如用户输入5,则表示结点n 的值为5;接下来程序输出提示信息—“Please insert the distance between one city and another:”,例如用户输入测试数据中给出的路程矩阵,表示任意两个城市之间的距离,比如第一个城市到第0个城市之间的距离为25。
算法设计大作业—求解Tsps问题
基于贪心算法求解TSP问题一、TSP问题TSP问题(Travelling Salesman Problem)即旅行商问题,又译为旅行推销员问题、货郎担问题,是数学领域中著名问题之一。
假设有一个旅行商人要拜访n个城市,他必须选择所要走的路径,路径的限制是每个城市只能拜访一次,而且最后要回到原来出发的城市。
路径的选择目标是要求得的路径路程为所有路径之中的最小值。
TSP问题是一个组合优化问题。
该问题可以被证明具有NPC计算复杂性。
TSP问题可以分为两类,一类是对称TSP问题(Symmetric TSP),另一类是非对称问题(Asymmetric TSP)。
所有的TSP问题都可以用一个图(Graph)来描述:V={c1, c2, …, ci, …, cn},i = 1,2, …, n,是所有城市的集合.ci表示第i个城市,n为城市的数目;E={(r, s): r,s∈V}是所有城市之间连接的集合;C = {crs: r,s∈V}是所有城市之间连接的成本度量(一般为城市之间的距离);如果crs = csr, 那么该TSP问题为对称的,否则为非对称的。
一个TSP问题可以表达为:求解遍历图G = (V, E, C),所有的节点一次并且回到起始节点,使得连接这些节点的路径成本最低。
二、贪心算法贪心算法,又名贪婪算法,是一种常用的求解最优化问题的简单、迅速的算法。
贪心算法总是做出在当前看来最好的选择,它所做的每一个在当前状态下某种意义上是最好的选择即贪心选择,并希望通过每次所作的贪心选择导致最终得到问题最优解。
必须注意的是,贪心算法不是对所有问题都能得到整体最优解,选择的贪心策略必须具备无后效性,即某个状态以后的过程不会影响以前的状态,只与当前状态有关。
1、贪心算法的基本思路从问题的某一个初始解触发逐步逼近给定的目标,以尽可能快地求得更好的解。
当达到某算法中的某一步不能再继续前进时,算法停止。
大致步骤如下:1)建立数学模型来描述问题;2)把求解的问题分成若干个子问题3)对每一个子问题求解,得到子问题的局部最优解4)把子问题的局部最优解合成原问题的一个解2、贪心算法的实现框架贪心算法没有固定的算法框架,算法设计的关键是贪心策略的选择,而贪心策略适用的前提是:局部最优策略能导致产生全局最优解。
TSP问题及其应用综述
TSP问题及其应用综述作者:林沐霖何茂森朱俊明来源:《科教导刊·电子版》2019年第06期摘要 TSP是数学领域内一道著名的难题之一,如何求解一直是学术界研究的热点问题。
本文首先阐述了TSP问题的基本概念,介绍了TSP问题的一般描述及数学模型,然后归纳了现有对TSP问题求解的较为有效的方法—蚁群算法和遗传算法,最后阐述了TSP的应用领域。
关键词 TSP 遗传算法蚁群算法中图分类号:TP301.6 文献标识码:A1 TSP问题的基本概念TSP(Traveling Salesman Problem)问题,可译为旅行商问题,是数学领域中著名的组合优化类难题之一。
1.1 TSP问题的描述现有对TSP问题的标准描述为:已知有城市数量为,一位旅行商人从其中的某一个城市出发,途中需要经过所有的城市,但经过的次数有且仅有一次,最后再回到出发的城市,怎样规划路线才能使旅行商所走的路线最短。
1.2 TSP问题的数学模型设城市集合为V={v1,v2,…,vA},对城市的访问顺序为T={t1,t2,…,tA},其中ti=V(i=1,…A),而且ti+1=t1,则问题的目标函数如下:意为目标函数的最优值为所有途径城市之间的路径和最短。
1.3 TSP问题的分类从上述描述中可以看出TSP问题即是在若干城市或地点之间寻找一条回路,根据vi→vi+1与vi+1→vi的距离是否相当,可以将TSP问题分为对称TSP问题和非对称TSP问题。
2 TSP问题的求解方法TSP问题已经被证明是一个NP-hard问题,即在P≠NP的假设下,找不到一个多项式时间算法来求解其最优解。
TSP问题很容易被描述清楚,但是却较难找到合适的求解算法,自1932年TSP问题出现以来,已经有诸多学者在研究相关领域的问题,但至今仍为找到有效的方法。
曾经传统的经典优化算法经常被用来求解TSP问题的解,但是当城市数量较大时,就难以快速找到最优解。
随着人工智能的发展,出现了许多独立于问题的独立算法,如蚁群算法、粒子群算法、遗传算法、鱼群算法、狼群算法等等。
摘要TSP问题是组合优化领域的经典问题之一.
摘要:TSP问题是组合优化领域的经典问题之一,吸引了许多不同领域的研究工作者,包括数学,运筹学,物理,生物和人工智能等领域,他是目前优化领域里的热点.本文从动态规划法,分支界限法,回溯法分别来实现这个题目,并比较哪种更优越,来探索这个经典的NP(Nondeterministic Polynomial)难题.关键词:旅行商问题求解算法比较一.引言旅行商问题(Travelling Salesman Problem),是计算机算法中的一个经典的难解问题,已归为NP一完备问题类.围绕着这个问题有各种不同的求解方法,已有的算法如动态规划法,分支限界法,回溯法等,这些精确式方法都是指数级(2n)[2,3]的,根本无法解决目前的实际问题,贪心法是近似方法,而启发式算法不能保证得到的解是最优解,甚至是较好的解释.所以我认为很多问题有快速的算法(多项式算法),但是,也有很多问题是无法用算法解决的.事实上,已经证明很多问题不可能在多项式时间内解决出来.但是,有很多很重要的问题他们的解虽然很难求解出来,但是他们的值却是很容易求可以算出来的.这种事实导致了NP完全问题.NP表示非确定的多项式,意思是这个问题的解可以用非确定性的算法"猜"出来.如果我们有一个可以猜想的机器,我们就可以在合理的时间内找到一个比较好的解.NP-完全问题学习的简单与否,取决于问题的难易程度.因为有很多问题,它们的输出极其复杂,比如说人们早就提出的一类被称作NP-难题的问题.这类问题不像NP-完全问题那样时间有限的.因为NP-问题由上述那些特征,所以很容易想到一些简单的算法――把全部的可行解算一遍.但是这种算法太慢了(通常时间复杂度为O(2^n))在很多情况下是不可行的.现在,没有知道有没有那种精确的算法存在.证明存在或者不存在那种精确的算法这个沉重的担子就留给了新的研究者了,或许你就是成功者.本篇论文就是想用几种方法来就一个销售商从几个城市中的某一城市出发,不重复地走完其余N—1个城市,并回到原出发点,在所有可能的路径中求出路径长度最短的一条,比较是否是最优化,哪种结果好.二.求解策略及优化算法动态规划法解TSP问题我们将具有明显的阶段划分和状态转移方程的规划称为动态规划,这种动态规划是在研究多阶段决策问题时推导出来的,具有严格的数学形式,适合用于理论上的分析.在实际应用中,许多问题的阶段划分并不明显,这时如果刻意地划分阶段法反而麻烦.一般来说,只要该问题可以划分成规模更小的子问题,并且原问题的最优解中包含了子问题的最优解(即满足最优子化原理),则可以考虑用动态规划解决.所以动态规划的实质是分治思想和解决冗余,因此,动态规划是一种将问题实例分解为更小的,相似的子问题,并存储子问题的解而避免计算重复的子问题,以解决最优化问题的算法策略.旅行商问题(TSP问题)其实就是一个最优化问题,这类问题会有多种可能的解,每个解都有一个值,而动态规划找出其中最优(最大或最小)值的解.若存在若干个取最优值的解的话,它只取其中的一个.在求解过程中,该方法也是通过求解局部子问题的解达到全局最优解,但与分治法和贪心法不同的是,动态规划允许这些子问题不独立,(亦即各子问题可包含公共的子子问题)也允许其通过自身子问题的解作出选择,该方法对每一个子问题只解一次,并将结果保存起来,避免每次碰到时都要重复计算.关于旅行商的问题,状态变量是gk(i,S),表示从0出发经过k个城市到达i的最短距离,S为包含k 个城市的可能集合,动态规划的递推关系为:gk(i,S)=min[gk-1(j,S\{j})+dji] j属于S,dji表示j-i的距离.或者我们可以用:f(S,v)表示从v出发,经过S中每个城市一次且一次,最短的路径.f(S,v)=min { f(S-{u},u)+dist(v,u) }u in Sf(V,1)即为所求2.分支限界法解TSP问题旅行商问题的解空间是一个排列树,与在子集树中进行最大收益和最小耗费分枝定界搜索类似,使用一个优先队列,队列中的每个元素中都包含到达根的路径.假设我们要寻找的是最小耗费的旅行路径,那可以使用最小耗费分枝定界法.在实现过程中,使用一个最小优先队列来记录活节点,队列中每个节点的类型为M i n H e ap N o d e.每个节点包括如下区域: x(从1到n的整数排列,其中x [ 0 ] = 1 ),s(一个整数,使得从排列树的根节点到当前节点的路径定义了旅行路径的前缀x[0:s], 而剩余待访问的节点是x [ s + 1 : n - 1 ]),c c(旅行路径前缀,即解空间树中从根节点到当前节点的耗费),l c o s t(该节点子树中任意叶节点中的最小耗费), rc o s t(从顶点x [ s : n - 1 ]出发的所有边的最小耗费之和).当类型为M i n He a p N o d e ( T )的数据被转换成为类型T时,其结果即为l c o s t的值.分枝定界算法的代码见程序.程序首先生成一个容量为1 0 0 0的最小堆,用来表示活节点的最小优先队列.活节点按其l c o s t 值从最小堆中取出.接下来,计算有向图中从每个顶点出发的边中耗费最小的边所具有的耗费M i n O u t.如果某些顶点没有出边,则有向图中没有旅行路径,搜索终止.如果所有的顶点都有出边,则可以启动最小耗费分枝定界搜索.根的孩子(图1 6 - 5的节点B)作为第一个E-节点,在此节点上,所生成的旅行路径前缀只有一个顶点1,因此s=0, x[0]=1, x[1:n-1]是剩余的顶点(即顶点2 , 3 ,., n ).旅行路径前缀1 的开销为0 ,即c c = 0 ,并且,r c o st=n i=1M i n O u t .在程序中,bestc 给出了当前能找到的最少的耗费值.初始时,由于没有找到任何旅行路径,因此b e s t c的值被设为N o E d g e. 程序旅行商问题的最小耗费分枝定界算法templateT AdjacencyWDigraph::BBTSP(int v[]){// 旅行商问题的最小耗费分枝定界算法// 定义一个最多可容纳1 0 0 0个活节点的最小堆MinHeap > H(1000);T *MinOut = new T [n+1];// 计算MinOut = 离开顶点i的最小耗费边的耗费T MinSum = 0; // 离开顶点i的最小耗费边的数目for (int i = 1; i <= n; i++) {T Min = NoEdge;for (int j = 1; j <= n; j++)if (a[j] != NoEdge &&(a[j] < Min || Min == NoEdge))Min = a[j];if (Min == NoEdge) return NoEdge; // 此路不通MinOut = Min;MinSum += Min;}// 把E-节点初始化为树根MinHeapNode E;E.x = new int [n];for (i = 0; i < n; i++)E.x = i + 1;E.s = 0; // 局部旅行路径为x [ 1 : 0 ] = 0; // 其耗费为0E.rcost = MinSum;T bestc = NoEdge; // 目前没有找到旅行路径// 搜索排列树while (E.s < n - 1) {// 不是叶子if (E.s == n - 2) {// 叶子的父节点// 通过添加两条边来完成旅行// 检查新的旅行路径是不是更好if (a[E.x[n-2]][E.x[n-1]] != NoEdge && a[E.x[n-1]][1] != NoEdge && ( + a[E.x[n-2]][E.x[n-1]] + a[E.x[n-1]][1] < bestc || bestc == NoEdge)) {// 找到更优的旅行路径bestc = + a[E.x[n-2]][E.x[n-1]] + a[E.x[n-1]][1]; = bestc;E.lcost = bestc;E . s + + ;H . I n s e r t ( E ) ; }else delete [] E.x;}else {// 产生孩子for (int i = E.s + 1; i < n; i++)if (a[E.x[E.s]][E.x] != NoEdge) {// 可行的孩子, 限定了路径的耗费T cc = + a[E.x[E.s]][E.x];T rcost = E.rcost - MinOut[E.x[E.s]];T b = cc + rcost; //下限if (b < bestc || bestc == NoEdge) {// 子树可能有更好的叶子// 把根保存到最大堆中MinHeapNode N;N.x = new int [n];for (int j = 0; j < n; j++)N.x[j] = E.x[j];N.x[E.s+1] = E.x;N.x = E.x[E.s+1]; = cc;N.s = E.s + 1;N.lcost = b;N.rcost = rcost;H . I n s e r t ( N ) ; }} // 结束可行的孩子delete [] E.x;} // 对本节点的处理结束try {H.DeleteMin(E);} // 取下一个E-节点catch (OutOfBounds) {break;} // 没有未处理的节点}if (bestc == NoEdge) return NoEdge; // 没有旅行路径// 将最优路径复制到v[1:n] 中for (i = 0; i < n; i++)v[i+1] = E.x;while (true) {//释放最小堆中的所有节点delete [] E.x;try {H.DeleteMin(E);}catch (OutOfBounds) {break;}}return bestc;}while 循环不断地展开E-节点,直到找到一个叶节点.当s = n - 1时即可说明找到了一个叶节点.旅行路径前缀是x [ 0 : n - 1 ],这个前缀中包含了有向图中所有的n个顶点.因此s = n - 1的活节点即为一个叶节点.由于算法本身的性质,在叶节点上lco st 和cc 恰好等于叶节点对应的旅行路径的耗费.由于所有剩余的活节点的lcost 值都大于等于从最小堆中取出的第一个叶节点的lcost 值,所以它们并不能帮助我们找到更好的叶节点,因此,当某个叶节点成为E-节点后,搜索过程即终止. while 循环体被分别按两种情况处理,一种是处理s = n - 2的E-节点,这时,E-节点是某个单独叶节点的父节点.如果这个叶节点对应的是一个可行的旅行路径,并且此旅行路径的耗费小于当前所能找到的最小耗费,则此叶节点被插入最小堆中,否则叶节点被删除,并开始处理下一个E-节点.其余的E-节点都放在while 循环的第二种情况中处理.首先,为每个E-节点生成它的两个子节点,由于每个E-节点代表着一条可行的路径x [ 0 : s ],因此当且仅当是有向图的边且x [ i ]是路径x [ s + 1 : n - 1 ]上的顶点时,它的子节点可行.对于每个可行的孩子节点,将边的耗费加上 即可得到此孩子节点的路径前缀( x [ 0 : s ],x) 的耗费c c.由于每个包含此前缀的旅行路径都必须包含离开每个剩余顶点的出边,因此任何叶节点对应的耗费都不可能小于cc 加上离开各剩余顶点的出边耗费的最小值之和,因而可以把这个下限值作为E-节点所生成孩子的lcost 值.如果新生成孩子的lcost 值小于目前找到的最优旅行路径的耗费b e s t c,则把新生成的孩子加入活节点队列(即最小堆)中.如果有向图没有旅行路径,程序返回N o E d g e;否则,返回最优旅行路径的耗费,而最优旅行路径的顶点序列存储在数组v 中.3.回朔法解TSP问题回朔法有"通用解题法"之称,它采用深度优先方式系统地搜索问题的所有解,基本思路是:确定解空间的组织结构之后,从根结点出发,即第一个活结点和第一个扩展结点向纵深方向转移至一个新结点,这个结点成为新的活结点,并成为当前扩展结点.如果在当前扩展结点处不能再向纵深方向转移,则当前扩展结点成为死结点.此时,回溯到最近的活结点处,并使其成为当前扩展结点,回溯到以这种工作方式递归地在解空间中搜索,直到找到所求解空间中已经无活结点为止.旅行商问题的解空间是一棵排列树.对于排列树的回溯搜索与生成1,2,……, n的所有排列的递归算法Perm类似.设开始时x=[ 1,2,… n ],则相应的排列树由x[ 1:n ]的所有排列构成.旅行商问题的回溯算法找旅行商回路的回溯算法Backtrack是类Treveling的私有成员函数,TSP是Treveling的友员.TSP(v)返回旅行售货员回路最小费用.整型数组v返回相应的回路.如果所给的图G不含旅行售货员回路,则返回NoEdge.函数TSP所作的工作主要是为调用Backtrack所需要变量初始化.由TSP调用Backtrack(2)搜索整个解空间.在递归函数Backtrack中,当i = n时,当前扩展结点是排列树的叶结点的父结点.此时,算法检测图G是否存在一条从顶点x[ n-1 ]到顶点x[ n ]的边和一条从顶点x[ n ]到顶点1的边.如果这两条边都存在,则找一条旅行售货员回路.此时,算法还需判断这条回路的费用是否优于已找到的当前最优回路的费用best.如果是,则必须更新当前最优值bestc和当前最优解bestx.当i < n时,当前扩展结点位于排列树的第i–1 层.图G中存在从顶点x[ i-1 ]到顶点x[ i ]的边时,x[ 1:i ]构成图G的一条路径,且当x[ 1:i ]的费用小于当前最优值时,算法进入排列树的第I层.否则将剪去相应的子树.算法中用变量cc记录当前路径x[ 1:i ]的费用.解旅行商售货员问题的回溯法可描述如下:templateclass Traveling {friend Type TSP(int * *,int [],Type);private:void Backtrack(int i);int n, //图G的顶点数* x, //当前解*bestx; //当前最优解Type * *a, //图G的邻接矩阵cc, //当前费用bestc, //当前最优值NoEdge; //无边际记};templatevode Traveling::Backtrack(int i){if(I==n){if(a[x[n-1]][x[n]]! = NoEdge &&a[x[n]][1]!= NoEdge &&(cc + a[x[n-1]][x[n]]+a[x[n]][1]bestc== NoEdge) ){for(int j=1;j<=n;j++)bestx[j]=x[j];bestc =cc + a[x[n-1]][x[n]]+ a[x[n]][1];}}else {for(int j=I; j<=n;j++)//是否可进入x[j]子树if(a[x[i-1]][x[j]]! = NoEdge &&(cc + a[x[i-1]][x[i]]< bestc||bestc == NoEdge//搜索子数Swap(x[i],x[j]);cc += a[x[i-1]][x[i]];Backtrack(I+1);cc -= a[x[i-1]][x[i]];Swap(x[i],x[j]);}}}templateType TSP(Type * *a,int v[],int n,Type NoEdge){Traveling Y;//初始化YY.x = new int[n+1];// 置x为单位排列for(int i=1;i<=n;i++)Y.x[i] = I;Y.a=a;Y.n=n;Y.bestc = NoEdge;Y.bestc = v; = 0;Y. NoEdge = NoEdge;//搜索x[2:n]的全排列Y.Backtrack(2);Delete[] Y.x;三.三种方法的比较1.动态规划法和回朔法的比较:这本来就是两个完全不同的领域,一个是算法领域,一个是数据结构问题.但两者又交叉,又有区别.从本质上讲就是算法与数据结构的本质区别,回朔是一个具体的算法,动态规划是数据结构中的一个概念.动态规划讲究的是状态的转化,以状态为基准,确定算法,动态规划法所针对的问题有一个显著的特征,即它所对应的子问题树中的子问题呈现大量的重复.动态规划法的关键就在于,对于重复出现的子问题,只在第一次遇到时加以求解,并把答案保存起来,让以后再遇到时直接引用,不必重新求解.简单的说就是:动态规划法是从小单元开始积累计算结果.回朔讲究过程的推进与反还,随数据的搜索,标记,确定下一步的行进方向,回朔是去搜索.如果想要搜索时,发现有很多重复计算,就应该想到用动态规划了.动态规划和搜索都可以解决具有最优子结构的问题,然而动态规划在解决子问题的时候不重复计算已经计算过的子问题,对每个子问题只计算一次;而简单的搜索则递归地计算所有遇到的的子问题.比如一个问题的搜索树具有如下形式:........A......./.......B...C...../.\./.....D...E...F如果使用一般深度优先的搜索,依次搜索的顺序是A-B-D-E-C-E-F,注意其中节点E被重复搜索了两次;如果每个节点看作是一个子问题的话,节点E所代表的子问题就被重复计算了两次;但是如果是用动态规划,按照树的层次划分阶段,按照自底向上的顺序,则在第一阶段计算D,E,F;第二阶段计算B,C;第三阶段计算A;这样就没有重复计算子问题E.搜索法的优点是实现方便,缺点是在子问题有大量的重复的时候要重复计算子问题,效率较低;动态规划虽然效率高,但是阶段的划分和状态的表示比较复杂,另外,搜索的时候只要保存单前的结点;而动态规划则至少要保存上一个阶段的所有节点,比如在动态规划进行到第2阶段的时候,必须把第三阶段的D,E,F三个节点全部保存起来,所以动态规划是用空间换时间.另外,有一种折衷的办法,就是备忘录法,这是动态规划的一种变形.该方法的思想是:按照一般的搜索算法解决子问题,但是用一个表将所有解决过的子问题保存起来,遇到一个子问题的时候,先查表看是否是已经解决过的,如果已解决过了就不用重复计算.比如搜索上面那棵树,在A-B-D-E的时候,已经将E记录在表里了,等到了A-B-D-E-C的时候,发现E已经被搜索过,就不再搜索E,而直接搜索F,因此备忘录法的搜索顺序是A-B-D-E-C-(跳过E)-F自底向上的动态规划还有一个缺点,比如对于下面的树:........A......./.......B...C......G...../.\./.\..../.....D...E...F..H (I)如用自底向上的动态规划,各个阶段搜索的节点依次是:D,E,F,H,IB,C,GAA才是我们最终要解决的问题,可以看到,G,H,I根本与问题A无关,但是动态规划还是将它们也解决了一遍,这就造成了效率降低.而备忘录法则可以避免这种问题,按照备忘录法,搜索的次序仍然是:A-B-D-E-C-(跳过E)-F.备忘录法的优点是实现简单,且在子问题空间中存在大量冗余子问题的时候效率较高;但是要占用较大的内存空间(需要开一个很大的表来记录已经解决的子问题),而且如果用递归实现的话递归压栈出栈也会影响效率;而自底向上的动态规划一般用for循环就可以了.值得一提的是,用动态规划法来计算旅行商的时间复杂度是指数型的.2. 分支限界法和回朔法的比较:分支限界法类似于回溯法,也是一种在问题的解空间树T上搜索问题解的算法.但在一般情况下,分支限界与回溯法的求解目标不同.回溯法的求解目标是找出T中满足约束条件的所有解,而分支限界法的求解目标则是找出满足约束条件的一个解,或是在满足约束条件的解中找出使某一目标函数值达到极大或极小的解,即在某种意义下的最优解.我们先看一个列子:设G=(V,E)是一个带权图.图1中各边的费用(权)为一正数.图中的一条周游线是包括V中的每个顶点在内的一条回路.一条周游路线的费用是这条路线上所有边的费用之和.所谓旅行售货员问题就是要在图G中找出一条有最小费用的周游路线.给定一个有n个顶点的带权图G,旅行售货员问题要找出图G的费用(权)最小的周游路线.图1是一个4顶点无向带权图.顶点序列1,2,4,3,1;1,3,2,4,1和1,4,3,2,1是该图中3条不同的周游路线. 301 256 1043 20 4图1 4顶点带权图该问题的解空间可以组织成一棵树,从树的根结点到任一叶结点的路径定义了图G的一条周游路线.图1是当n=4时这种树结构的示例.其中从根结点A到叶结点L的路径上边的标号组成一条周游路线1,2,3,4,1.而从根结点到叶结点O的路径则表示周游路线1,3,4,2,1.图G的每一条周游路线都恰好对应解空间树中一条从根结点到叶结点的路径.因此,解空间树中叶结点个数为(n-1)!.A1B2 3 4C D E3 24 2 3F G H I J K4 3 4 2 3 2L M N O P Q图2 旅行售货员问题的解空间树对于图1中的图G,用回溯法找最小费用周游路线时,从解空间树的根结点A出发,搜索至B,C,F,L.在叶结点L处记录找到的周游路线1,2,3,4,1,该周游路线的费用为59.从叶结点L返回至最近活动结点F处.由于F处已没有可扩展结点,算法又返回到结点C处.结点C成为新扩展结点,由新扩展结点,算法再移至结点G 后又移至结点M,得到周游路线1,2,4,3,1,其费用为66.这个费用不比已有周游路线1,2,3,4,1的费用小.因此,舍弃该结点.算法有依次返回至结点G,C,B.从结点B,算法继续搜索至结点D,H,N.在叶结点N算法返回至结点H,D,然后再从结点D开始继续向纵深搜索至结点O.依次方式算法继续搜索遍整个解空间,最终得到1,3,2,4,1是一条最小费用周游路线.以上便是回溯法找最小费用周游路线的实列,但如果我们用分支限界法来解的话,会更适合.由于求解目标不同,导致分支限界法与回溯法在解空间树T上的搜索方式也不相同.回溯法以深度优先的方式搜索解空间树T,而分支限界法则以广度优先或以最小消耗优先的方式搜索解空间树T.分支限界法的搜索策略是,在扩展结点处,先生成所有的儿子结点(分支),然后再从当前的活动点表中选择下一个扩展结点.为了有效地选择下一扩展结点,以加速搜索的进程,在每一活结点处,计算一个函数值(限界),并根据这些已计算出的函数值,从当前活结点表中选择一个最有利的结点作为扩展结点,使搜索朝着解空间树上的最优解的分支推进,以便尽快的找出一个最优解.四.结论:参考文献:。
智能算法的TSP算法求解文献综述
文献综述题目:智能算法的TSP算法求解文献综述学生姓名:系别:数学物理系专业年级: 2012级信息与计算科学学号: 20120702015年 6 月 30日智能算法的TSP算法求解1 简介TSP问题为组合优化中的经典问题,已经证明为一NP完全问题,即其最坏情况下的时间复杂性随着问题规模的扩大,按指数方式增长,到目前为止不能找到一个多项式时间的有效算法。
遗传算法是一种进化算法,其基本原理是仿效生物界中的“物竞天择,适者生存”的演化法则。
遗传算法把问题参数编码为染色体,再按照所选择的适应度函数,利用迭代的方式进行选择、交叉、变异以及进化逆转等运算对个体进行筛选和进化,使适应值大的个体被保留,适应值小的个体被淘汰,新的群体继承了上一代的信息,又优于上一代,这样反复循环,直至满足条件,最后留下来的个体集中分布在最优解的周围,筛选出最优个体作为问题的解。
2 基于遗传算法TSP算法2.1 基于遗传算法的TSP算法总体框架TSP问题的遗传算法包括编码设计、种群初始化、适应度函数选择、终止条件设定、选择操作设定、交叉操作设定以及变异操作设定和进化逆转操作.为简化TSP问题的求解,假设每个城市和其它任意一个城市之间都以欧氏距离,直接相连.遗传算法TSP问题的流程图如图1所示。
.N2.2 算法的详细设计2.2.1 解空间的表示方式遗传算法对解空间的表示大多采用二进制编码形式,但是二进制编码方式不适合TSP 问题的解的表示,因为它要求特殊的修补算子来修复变化算子所产生的非法路径(即不可行路径).给出城市编号,用十进制数编码来表示解更合适,例如:近邻表示、次序表示和路径表示等等.这里采用了最简单的路径表示法.它是最自然、最接近人类思维的表示法。
2.2.2 种群初始化种群的规模选择应适当,盲目的增大种群规模不能使算法得到改进,反而大大增加了计算的开销。
2.2.3 适应度函数适应度表明个体或解的优劣性,不同的问题,适应度函数的定义方式也不同,优化的目标就是选择适应度函数值尽可能大的染色体,适应度函数值越大的染色体越优质,反之越劣质.求得种群中所有个体的适应值后,将适应值最大的个体保存起来,到演化完毕时,这个个体就是最后要求的最优解。
TSP问题的算法研究

TSP问题的算法研究简介旅行商问题(Traveling Salesman Problem,简称TSP)是指在旅行商(salesman)需要依次拜访多个城市,并最终返回起点城市的问题。
TSP是一个著名的NP-hard问题,在实际应用中有着广泛的应用。
本文将对TSP问题的算法研究进行探讨。
问题描述给定n个城市之间的距离矩阵D(n*n),以及起点城市,要求找到一条最短的路径,使得旅行商能够依次经过每个城市,并最终回到起点城市。
传统方法基于暴力搜索的穷举算法最简单直观的解决TSP问题的方法是穷举法。
即尝试遍历所有可能的路径,计算每条路径的总长度,并找出最短路径。
但这种方法的时间复杂度为O(n!),随着城市数量的增加,计算量呈指数级增长,不适用于大规模问题。
动态规划算法动态规划算法可以用于求解TSP问题的近似解。
其基本思想是将问题划分为子问题,并利用子问题的最优解求解原问题的最优解。
但是由于TSP问题的子问题形态特殊,采用动态规划算法时需要引入状态压缩技巧,以减小问题规模,提高求解效率。
进化算法遗传算法遗传算法是一种基于进化和遗传机制的优化算法,常用于解决TSP问题。
其基本思想是模拟生物进化中的遗传、突变、选择等过程,通过不断迭代优化求解策略,最终找到最优解。
遗传算法的步骤如下:1.初始化一组随机的路径作为初始种群。
2.计算每个路径的适应度评估值,即路径长度。
3.使用选择操作选取一部分适应度较高的个体作为父代。
4.使用交叉操作生成子代,在子代中引入新的解,并避免陷入局部最优解。
5.使用变异操作对子代进行突变,增加种群的多样性。
6.计算新种群中每个路径的适应度评估值。
7.重复步骤3-6,直到满足停止条件。
蚁群算法蚁群算法是基于蚁群觅食行为的启发式算法,常用于求解TSP问题。
其基本思想是通过模拟蚂蚁在寻找食物过程中的行为,不断更新路径信息素,从而实现解的优化。
蚁群算法的步骤如下:1.初始化一群蚂蚁,每只蚂蚁在一个城市开始。
求解TSP问题算法综述

求解TSP问题算法综述一、本文概述本文旨在全面综述求解旅行商问题(Traveling Salesman Problem, TSP)的各种算法。
TSP问题是一个经典的组合优化问题,自提出以来就引起了广泛的关注和研究。
该问题可以描述为:给定一系列城市和每对城市之间的距离,求解一条最短的可能路线,使得一个旅行商从某个城市出发,经过每个城市恰好一次,最后返回出发城市。
本文将首先介绍TSP问题的基本定义、性质及其在实际应用中的重要性。
接着,我们将综述传统的精确算法,如动态规划、分支定界法等,以及它们在求解TSP问题中的优缺点。
然后,我们将重点介绍启发式算法和元启发式算法,包括模拟退火、遗传算法、蚁群算法等,这些算法在求解大规模TSP问题时表现出良好的性能和效率。
本文还将探讨近年来新兴的机器学习算法在TSP问题求解中的应用,如深度学习、强化学习等。
我们将对各类算法进行总结和评价,分析它们在不同场景下的适用性和性能表现。
我们也将展望TSP问题求解算法的未来发展方向,以期为相关领域的研究和实践提供有益的参考和指导。
二、经典算法求解旅行商问题(TSP)的经典算法多种多样,每种算法都有其独特的优缺点和适用场景。
本节将对一些代表性的经典算法进行综述。
暴力穷举法(Brute-Force):暴力穷举法是最简单直观的TSP求解算法。
其基本思想是生成所有可能的旅行路径,计算每条路径的总距离,然后选择最短的那条。
虽然这种方法在理论上可以找到最优解,但由于其时间复杂度为O(n!),对于大规模问题来说计算量极大,因此并不实用。
动态规划(Dynamic Programming, DP):动态规划是一种通过将问题分解为更小的子问题来求解的优化方法。
对于TSP问题,DP算法可以将一个大循环中的多个子问题合并成一个子问题,从而减少重复计算。
然而,TSP的DP算法仍面临“维度灾难”的问题,即当城市数量增多时,所需存储空间和计算时间呈指数级增长。
基于模拟退火算法的TSP问题求解算法研究
基于模拟退火算法的TSP问题求解算法研究旅行商问题(Traveling Salesman Problem,TSP)是运筹学中一个经典的问题,它是一个非常著名的NP难题。
该问题的简化版本就是,给定一些城市和每对城市之间的距离,求解访问每个城市一次且仅一次,并回到起点所需要的最短路径。
这个问题在实际生产和科学研究中具有重要的应用价值,例如供应链物流、电路设计等领域。
由于该问题是NP难问题,传统的精确求解算法在处理较大的实例时会遇到很大的困难。
因此,研究者们通常选择利用启发式算法来求解TSP问题。
其中一种较为经典的启发式算法是模拟退火算法(Simulated Annealing Algorithm,SAA)。
模拟退火算法的基本原理是模拟物质的固化过程,从一个高温状态开始,利用概率方法在状态空间中随机漫步,降低温度,直至固化为止。
在求解TSP问题中,SAA的核心思想是通过迭代寻找更优解,它的求解过程类似于热力学中的退火过程。
SAA解决TSP问题的具体步骤如下:1.建立初始解:随机生成一条回路2.设定初始温度T,以一定的步长降温3.在当前解的邻域内,随机产生一个新解4.计算ΔE = Enew - Eold,其中Enew为新解的目标函数值,Eold为当前解的目标函数值5.当ΔE < 0,接受新解。
当ΔE > 0,计算概率P = exp(-ΔE/T),如果P > rand(0, 1),则接受新解。
6.重复3-5步,直至温度降至指定值在应用SAA求解TSP问题时,邻域搜索空间的大小和搜索速度是需要考虑的两个重要因素。
为了提高算法的效率,改进SAA算法成为了许多研究的重点。
一些常见的SAA改进方法包括:1.使用启发式算子,如2-opt算子和3-opt算子,来生成新解,避免了随机产生新解的盲目性。
2.设置合适的退火迭代次数,可以在短时间内获得较好的解,同时提高搜索速度。
3.采用并行计算的方式,多个线程同时搜索,并将较优解合并,可以进一步提高搜索效率。
tsp实验报告

tsp实验报告TSP实验报告一、引言旅行推销员问题(Traveling Salesman Problem,TSP)是一类经典的组合优化问题,它在现实生活中有着广泛的应用。
TSP的目标是寻找一条最短路径,使得旅行推销员能够经过所有城市并回到出发点。
本实验旨在通过使用不同的算法和策略,探索解决TSP问题的方法,并比较它们的效果。
二、实验方法1. 数据集选择本实验选取了某个地区的城市坐标作为数据集,其中包含了20个城市的经纬度信息。
这些城市的位置分布较为均匀,有助于测试算法在不同城市分布情况下的表现。
2. 算法实现本实验采用了两种常见的算法来解决TSP问题:贪心算法和遗传算法。
贪心算法:该算法的基本思想是每次选择距离当前位置最近的未访问城市作为下一个目的地,直到所有城市都被访问过。
贪心算法简单直观,但不能保证获得最优解。
遗传算法:该算法通过模拟生物进化过程来解决问题。
它通过随机生成初始种群,然后通过选择、交叉和变异等操作,逐步优化种群中的个体,直到找到最优解。
遗传算法适用于求解复杂问题,但计算量较大。
3. 实验步骤首先,使用贪心算法计算出一条初始路径。
然后,利用遗传算法对该路径进行优化,得到更短的路径。
实验中,设置了合适的参数,如种群大小、交叉概率和变异概率,以获得较好的结果。
三、实验结果与分析经过多次实验,得到了贪心算法和遗传算法的结果,并与最优解进行了比较。
1. 贪心算法结果使用贪心算法,得到了一条初始路径,总长度为X。
该路径并不是最优解,但它提供了一个起点,可以作为遗传算法的输入。
2. 遗传算法结果经过遗传算法的优化,得到了一条更短的路径,总长度为Y。
与贪心算法相比,遗传算法能够通过不断迭代优化路径,找到更接近最优解的结果。
3. 与最优解的比较通过与最优解进行比较,可以评估算法的性能。
实验结果显示,贪心算法得到的路径长度为Z,遗传算法得到的路径长度为W,分别与最优解相差了A%和B%。
可以看出,遗传算法在寻找最优解方面表现更好,但仍存在一定的误差。
TSP问题算法分析报告
算法第二次大作业TSP问题算法分析021251班王昱(02125029)一.问题描述“TSP问题”常被称为“旅行商问题”,是指一名推销员要拜访多个地点时,如何找到在拜访每个地点一次后再回到起点的最短路径。
TSP问题在本实验中的具体化:从A城市出发,到达每个城市并且一个城市只允许访问一次,最后又回到原来的城市,寻找一条最短距离的路径。
二.算法描述2.1分支界限法2.1.1 算法思想分支限界法常以广度优先或以最小耗费(最大效益)优先的方式搜索问题的解空间树。
在分支限界法中,每一个活结点只有一次机会成为扩展结点。
活结点一旦成为扩展结点,就一次性产生其所有儿子结点。
在这些儿子结点中,导致不可行解或导致非最优解的儿子结点被舍弃,其余儿子结点被加入活结点表中。
此后,从活结点表中取下一结点成为当前扩展结点,并重复上述结点扩展过程。
这个过程一直持续到找到所需的解或活结点表为空时为止。
2.1.2 算法设计说明设求解最大化问题,解向量为X=(x1,…,xn),xi的取值范围为Si,|Si|=ri。
在使用分支限界搜索问题的解空间树时,先根据限界函数估算目标函数的界[down, up],然后从根结点出发,扩展根结点的r1个孩子结点,从而构成分量x1的r1种可能的取值方式。
对这r1个孩子结点分别估算可能的目标函数bound(x1),其含义:以该结点为根的子树所有可能的取值不大于bound(x1),即:bound(x1)≥bound(x1,x2)≥…≥ bound(x1,…,xn)若某孩子结点的目标函数值超出目标函数的下界,则将该孩子结点丢弃;否则,将该孩子结点保存在待处理结点表PT中。
再取PT表中目标函数极大值结点作为扩展的根结点,重复上述。
直到一个叶子结点时的可行解X=(x1,…,xn),及目标函数值bound(x1,…,xn)。
2.2 A*算法算法思想对于某一已到达的现行状态, 如已到达图中的n节点, 它是否可能成为最佳路径上的一点的估价, 应由估价函数f(n)值来决定。
TSP问题报告 算法分析与设计
TSP问题一、问题描述所谓 TSP 问题是指旅行商要去 n 个城市推销商品,其中每个城市到达且仅到达一次,并且要求所走的路程最短(该问题又称货郎担问题、邮递员问题、售货员问题等)。
TSP 问题最容易想到、也肯定能得到最优解的算法是穷举法,即考察所有可能的行走线路,从中选出最佳的一条。
二、解题思路1.基本思路对于图G=(V,E),从起点出发,其余点作为路径集合,然后列出路径集合中各个点作为子路径起点,其余点作为路径集合的情况,从中选取路径长度最短的情况,再对路径集合迭代计算,直到路径集合为空的时候,这时最短路径的情况即是该点到原点的距离,路径集合是空集{},此时已触碰临界条件,可以不断回溯之前的迭代,进而解决此问题。
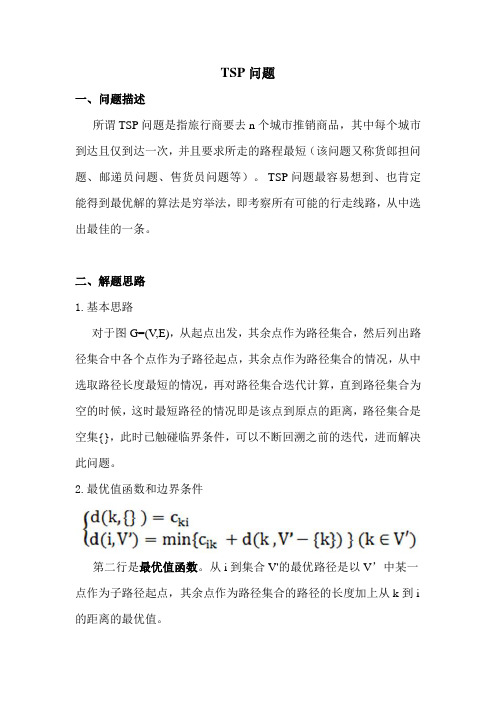
2.最优值函数和边界条件第二行是最优值函数。
从i到集合V'的最优路径是以V’中某一点作为子路径起点,其余点作为路径集合的路径的长度加上从k到i 的距离的最优值。
第一行是边界条件。
当子路径的路径集合是空集时,最优子问题的解,本题来说也就是子路径的最短路径就是从子路径的起点到原来起点的距离。
3.标记函数标记函数同时也是算法的核心函数,完全按照递推公式的思想,使用迭代的方式。
distance是第一个核心函数,主要负责路径的输出;distance1是第二个核心函数,主要负责寻求子集合的最短路径并计算长度。
第一核心函数中调用了第二核心函数,第一核心函数只负路径的输出,在将问题细化深入的过程中,将真正的路径寻找和计算交给第二核心函数。
4.标记函数的解读:(1)distancedouble distance(int a,int b[],int c,double d[][NUM],int start) a:子问题起点b[]:字问题路径集合d[][]:距离矩阵(最开始创建的,所有调用函数过程中,都使用的这个,没有更改,只有读取)start:原问题起点(达到临界条件时,找到路径长度)//边界条件if(c==0){cout<<start;return d[a][start];}//非临界条件时候,构建所有路径集合的,起点和对应的路径集合,在迭代的时候会使用到else{for(i=0;i<c;i++){point[i]=b[i];k=0;for(j=0;j<c;j++){if(i!=j){e[i][k]=b[j]; /*节点方阵,冗余的*/k++;}}}mindistance=distance1(point[k],e[k],c-1,d,start)+d[a][point[k] ];//假定下一层的最短路径就是p[0]以及其对应的路径矩阵e[k]for(i=0;i<c-1;i++) //比较出下一层真正的最短路径if(mindistance>(distance1(point[i+1],e[i+1],c-1,d,start)+d[ a][point[i+1]])){k=i+1;mindistance=distance1(point[k],e[k],c-1,d,start)+d[a][poin t[k]];}cout<<point[k]<<"->";return distance(point[k],e[k],c-1,d,start)+d[a][point[k]]; }(2)distance1double distance1(int a,int b[],int c,double d[][NUM],int start) //边界条件if(c==0){return d[a][start];}//非边界条件else{for(i=0;i<c;i++){point[i]=b[i];k=0;for(j=0;j<c;j++){if(i!=j){e[i][k]=b[j];k++;}}}//拆分该点到达起点所需经过的集合该点的下一点到达起点所需经过的集合mindistance=distance1(point[0],e[0],c-1,d,start)+d[a][point[ 0]];for(i=0;i<c-1;i++)if(mindistance>(distance1(point[i+1],e[i+1],c-1,d,start)+d[ a][point[i+1]]))mindistance=distance1(point[i+1],e[i+1],c-1,d,start)+d[a][ point[i+1]];return mindistance; //求最小值}}5.时间复杂度分析整体的时间复杂度是O (2^n )。
tsp问题总结归纳

tsp问题总结归纳TSP(Traveling Salesman Problem,旅行商问题)是一类经典的组合优化问题,在数学和计算机科学领域具有重要的研究价值和实际应用。
本文将从定义、解决方法和应用三个方面,对TSP问题进行总结归纳。
一、定义TSP问题是指给定一系列城市和城市之间的距离,求解经过每个城市一次且路径最短的旅行路线。
该问题可以用图论中的欧拉图和哈密顿图来描述。
在欧拉图中,一笔画问题要求从图的一个顶点开始,经过每个边一次并回到起点;而哈密顿图中,要求从图的一个顶点开始,经过每个顶点一次而路径最短。
二、解决方法1. 穷举法:穷举法是最简单直接的解决TSP问题的方法,即尝试遍历所有可能的路径,并计算每条路径的总距离,从中选出最短的一条。
然而,由于TSP问题的复杂性,穷举法在实际应用中很少使用,因为其时间复杂度随着城市数量的增加而急剧增加。
2. 动态规划:通过将问题分解为子问题,并利用子问题的最优解构建整体最优解。
动态规划方法可以有效地解决TSP问题,但其时间复杂度仍然较高,在大规模问题中难以实施。
3. 遗传算法:遗传算法是一种基于生物进化原理的搜索算法,通过模拟遗传、突变和选择等操作,逐步优化解的质量。
遗传算法在解决TSP问题中具有良好的性能和适应性,能够处理较大规模的问题,但其结果并不一定是全局最优解。
三、应用TSP问题在实际生活和工程领域中有广泛的应用,如物流配送、路径规划、电路布线等。
通过求解TSP问题,可以帮助优化物流运输路线、节约时间和资源成本,提高效率。
结论TSP问题是一个具有理论研究价值和实际应用的经典问题,其求解方法多种多样。
穷举法虽然简单直接,但在实际问题中难以应用;动态规划方法虽然高效,但对于大规模问题仍有限制;遗传算法具有较好的适应性和性能,可以处理较大规模的问题。
TSP问题在实际应用中可以有效地优化物流和路径规划等方面,提高效率和节约成本。
通过对TSP问题的总结归纳,我们可以更好地理解和应用有关组合优化问题的解决方法,推动其在实践中的发展和应用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
TSP问题综述及相应求解算法研究
摘要: TSP 问题是组合优化中的经典问题。
其解决方法有局部优化方法和一些启发式算法。
关键词:TSP;2 - 交叉法算法;L in - Kernighan算法
旅行商问题,即TSP问题(Traveling Salesman Problem)是数学领域中著名问题之一。
假设有一个旅行商人要拜访n个城市,他必须选择所要走的路径,路经的限制是每个城市只能拜访一次,而且最后要回到原来出发的城市。
路径的选择目标是要求得的路径路程为所有路径之中的最小值。
它被证明是NP——难(NP——hard)问题并与VLS制造,输油管道铺设,电路布线等问题有关,学术界对该问题的认识日益深入。
由于求其确定解的时间是指数型的,不易掌握,因而对其近似算法的研究一直是算法设计中的一个重要课题。
目前已经有很多关于求解TSP近似最优解的算法。
主要包括:一些局部优化算法,如:近邻法(nearest - neighbor)最近插入(nearest insertion)、最远插入法(farthest insertion)、贪心法(greedy)、分枝定界法(branch and bound)、填空曲线法(space - filling curve )、Karp 法、2 - 交叉法(2 - op t )、k交叉法及L in - Kernighan 法等;一些启发式算法如模拟退火算法[3 ] 、遗传算法[4 ] 、蚁群算法[5 ] 、免疫算法[6 ] 、神经网络等。
下面就来分析一下TSP问题的各种算法。
( 1) 2 - op t算法
它从城市的一个随机排列(称为路径T)开始并试图去改善它。
T 的邻域定义为交换T 中不相邻的两条边得到的所有路径的集合。
这种移动称为 2 - 交叉法(2 - op t),如图1、图2所示。
图1
如果cost (0, 2) + cost (5, 6) > cost (0, 5) + cost (2, 6) ,即城市0和2 之间的距离与5和6之间的距离和大于0和5与2和6之间的距离和,那么路径T ( 0—2—4—1—8—7—3—5—6—9—0 )就替换(0—5—3—7—8—1—4—2—6—9—0) ,如图2所示。
如果在邻域中找不到比T更好的结果, 则T为 2 - 交换的最优结果且算法结束,在彻底放弃之前一定要尝试多个随机排列。
图2
(2) L in - Kernighan算法
求解TSP 问题的目前最好的局部搜索过程是L in - Ker ~ nighan算法。
图3
基本的L in - Kernighan算法有多种版本,它们在细节上稍有差别。
现在来简单地描述其中的一种,该方法所采用的表示方式并不是哈密顿路径而是所谓的δ- 路径。
下面是它的原理。
δ- 路径结点的个数比边数多1,并且在路径中所有的结点除了最后一个结点可以在前面出现过以外,其它结点都仅出现一次。
如图3所示,它也许可以加深我们的理解,它图示了一条δ-路径: a—b—c—d—e—f—g—h—i—j—e。
这就是一条δ- 路径,因为它有10条边和11个结点,并且除了最后一个结点e外,别的结点都只出现了一次。
任何一条δ- 路径都可以通过替换最后一条边而成为合法路径。
例如,用边(j, a)替换边(j, e)就产生了一条合法路径;并且,用任何一条从j起始的边来代替边(j, e)都会产生一条新的δ-路径,如果用边(j, f)来替换边(j, e)。
用switch(e, f)来表示这样一条路径的替换, e和f表示切换的结点。
其中结点的顺序非常重要:第一个结点(e)被删除并被第二个结点(f)替换。
如果交换的结点本身并不重要,就用sw itch来表示一次替换。
新的δ-路径的费用增加了cost (j, f) - cost (j, e) ,当然这个增量可能为负。
还要注意的是一条δ- 路径有两条“最后边”。
在图 3 中,在建立合法路径或者产生一条新的δ- 路径时既可以替换边(j, e),也可以替换边(f, e)。
下面来描述L in - Kernighan算法的基本步骤。
它从一条随机路径T开始并产生一系列的δ- 路径。
第一条δ- 路径由T产生,后面的δ- 路径则总是通过切换移动由前一条δ- 路径产生。
Step 1产生一条路径T,Best_cost = cost ( T) ,对T中每个结点k和T每条边edge(ik)做以下操作。
Step2 如果存在j ≠k使得cost ( i, j) ≤cost ( i, k)则移去
边(i, k)并增加边(i, j)来建立一条δ- 路p ,否则转向Step4。
Step3 由p 中构造一条路径T,如果cost ( T) < Best_cost 则Best_cost←cost T 保存T;如果存在p 的一个切换使产生了一条费用不大于cost (T ) 的δ- 路则进行切换得到一条新的δ- 路p ,转向Step3。
Step4 如果cost ( T) < Best_cost则Best_cost = cost ( T) , 保存T, 如果还有未测试的结点或者边的组合则转向Step2。
L in - Kernighan算法是最著名的局部搜索算法,它具有非常快的执行速度,能得到100万个城市的最优解,与最优路径仅相差
2% ,在一台现代工作站上只需不到一个小时的时间。