TCAS
TCAS
视觉信息
三、音频信息
TCAS除了可以各种视觉信息发出交通咨 询或解脱咨询信息外,还同时以合成语 音来提醒飞行员。在各种情况下的语音 信息及其含义如下表所示。
音频信息(举例) TA RA音频信息语音信息 含义 TRAFFIC, TRAFFIC 交通,交通 CLIMB, CLIMB 爬升,爬升 DESCEND ,DESCEND 下降,下降 INCREASE CLIMB… INCREASE CLIMB 增大爬升,增大爬升 INCREASE DESCEND… INCREASE DESCEND 增大下降,增大下降 CLIMB,CROSSING CLIMB… CLIMB,CROSSING CLIMB 爬升,穿越爬升…爬升,穿越爬升 DESCEND ,CROSSING DESCEND… 下降,穿越下降… CLIMB, CLIMB NOW… CLIMB, CLIMB NOW 爬升,现在爬升…爬升,现在爬升 DESCEND, DESCEND NOW… DESCEND , DESCEND NOW 下降,现在下降…下降,现在 下降 ADJUST VERTICAL SPEED, ADJUST 调节垂直速度,调节 MORNITOR VERTICAL SPEED 监视垂直速度 MAINTAIN VERTICAL SPEED, MAINTAIN 保持垂直速度,保持 MAINTAIN VERTICAL SPEED…CROSSING MAINTAIN 保持垂直速度…保持穿越 CLEAR OF CONFLICT 冲突解除 TCAS TEST TCAS 自检 TCAS TEST OK TCAS自检通过 TCAS TEST FAIL TCAS自检失败
TCAS天线的方向性
8.2 TCAS 的组成与工作概况
TCASⅡ是以S模式应答机为基础而工作的。装 备TCASⅡ,就必须装备S模式应答机。图8-3 为TCASⅡ的系统组成简化框图。 机载防撞系统由下列组件组成: (1) TCAS计算机/收发机一部; (2) TCAS的上、下方向性天线各一部,有 的飞机也可以选装全向的下天线; (3) 两部S模式应答机; (4) 应答机的上、下天线;
飞机防撞系统TCAS

飞机防撞系统可显示飞机周围的情况,有效地辅助飞机驾 驶员主动搜寻和目视发现可能的空中交通冲突,并在需要时 提供语音告警,同时帮助驾驶员以适当机动方式躲避危险, 这些都有助于避免灾难性事故的发生。
飞机防撞系统TCAS简介
TCAS有三类: TCAS Ⅰ:能侦测上7000英尺下10000英尺,前15至40海里,发 现有其它飞机接近时,提前40余秒警告飞行员对方飞机位置和 高度,称为交通咨询(TA, Traffic Advisory),语音警告: “Traffic!Traffic! Traffic!” TCAS Ⅱ:第二代空中防撞系统,目前最广泛使用,会用声音 及显示警告飞行员,称为决断咨询Resolution Advisory (RA),并会语音提示避撞动作,如“Climb! Climb Climb!”“Descend! Descend! Descend!”,另外一架飞 机会有相反警告。 TCAS Ⅲ:第三代空中防撞系统,除了有上下避撞措施还有左 右避撞措施。
飞机防撞系统TCAS简介
1956年6月30日在科罗拉多大峡谷上空6500米处,两架民航班 机相撞造成128人死亡,民航当局随后启动了对有效防撞系统 的研发工作。 1978年,一架轻型飞机在圣地亚哥上空与一架民航班机相撞, 导致了美国联邦航空局(FAA)启动对空中交通警戒和防撞系统 (TCAS)的研究。 最终导致美国国会立法要求实施TCAS的事件是1986年8月31日 在加利福尼亚洲靠近 洛杉矶国际机场的塞 里图斯空域内,一架 墨西哥航空 (Aeromexico)的DC-9 和一架私人飞机空中 相撞。
飞机防撞系统TCAS侦测范围
飞机防撞系统TCAS侦测范围
飞机防撞系统TCAS侦测范围
TCAS无威胁交通目标显示
TCAS接近交通目标显示
关于TCAS故障定位及排故的相关探讨

关于TCAS故障定位及排故的相关探讨摘要交通告警和防撞系统TCAS是飞机飞行中的关键系统,对飞机飞行安全有很大的影响。
本文通过研究TCAS线路及工作原理,从分系统、结构特性以及与实际应用结合,明确TCAS系统遇到故障时采取归类判断分析,并进一步结合故障发生时飞机的实际状态,争取能够快速定位故障,减短飞机停场时间。
一、概述交通告警和防撞系统TCAS是飞机飞行中的关键系统,对飞机飞行安全有很大的影响。
TCAS是一种机载系统,可帮助飞行机组与地面空中交通管制维持安全间隔。
它与空中交通管制应答机一起联合工作,为驾驶员提供附近空域飞机的飞行情况,预测飞机之间的潜在威胁,在飞机之间可能出现冲突时给予驾驶员提示,避免撞机事件的发生。
二、TCAS组成和工作原理(一)TCAS组成某型民机TCAS由1个交通告警和防撞系统收发机、一个定向天线和一个全向天线(选装时将以一个定向天线替代)组成。
(二)TCAS工作原理TCAS系统通过探测附近空间飞机的存在,在附近有飞机与本机距离过近存在安全威胁时,发出警告信息来提示驾驶员。
TCAS发射询问信号到附近飞机上的空中交通管制应答机,并利用应答机的应答信息进行处理得出附近飞机的航迹。
通过这一数据,TCAS能估算出潜在的威胁。
TCAS利用发射信号和应答信号间的时间间隔来计算距离,同时根据方向天线确定方位,从而得到附近每架应答飞机的相对位置。
高度信息由应答机提供。
(三)应答机引发的故障应答机是TCAS系统正常运行的关键交联系统,在某型民机中,应答机装有两部且功能一致。
TDR的故障类型大致分为:内部故障、S模式地址无效输入、RIU(即无线电接口装置)信号无输入、TDR输出信号无效。
此类故障在排故时较为简单判断,即使驾驶舱页面无有效反馈,也可通过地面试验:TCAS的自测试以及ATC的自测试来判断,另两部TDR功能和件号一致,也可通过对串1号和2号TDR来辨别故障位置是否转移。
(四)AHRS和RA引发的故障飞机的姿态和高度数据分别由AHRS(即姿态和航向基准系统)和RA(即无线电高度表)提供。
737-NG_交通警戒和避撞系统

有效性34—45—00交通警戒和避撞系统 — 介绍概述交通警戒和避撞系统(TCAS )有助于机组维持与其他装有ATC 应答机的飞机之间的空中交通安全间隔。
TCAS 是一种机载系统,它独立于地面的ATC 系统而工作。
TCAS 向邻近飞机发送询问信号,那些装有空中交通管制雷达信标系统(ATCRBS )应答机或一种空中交通管制S 模式应答机的飞机响应此询问,TCAS 利用这些应答信号计算和它们之间的距离,相对方位和应答飞机的高度。
如果响应的飞机并不报告高度,TCAS 不能计算该飞机的高度。
被TCAS 所跟踪着的飞机称为目标。
利用应答信号中的信息和自身飞机的高度,TCAS 算出目标和自身飞机之间的相对运动。
TCAS 然后计算目标将如何在最最接近点(CPA )贴近自身飞机。
目标被分类列为下列4种中的一种,取决于在CPA 点的间隔和CPA 点将发生的时间:— 其他交通 — 接近交通— 入侵者 — 威胁。
各种目标在显示器上的符号不同。
如果CPA 间隔在某一限度以内,TCAS 向机组提供咨询信息。
TCAS 以机组提供两个等级的咨询信息,即交通咨询(TA )和解脱咨询(RA ),咨询等级取决于高度和CPA 发生时间和在CPA 处的间隔大小。
交通咨询(TA )为直至CPA 发生的时间还相对地更远一些,并且CPA 点和入侵目标的间隔相对大一些。
解脱咨询(RA )为到达CPA 发生的时间相对地很短,并且CPA 点和威胁目标的间隔相对地更小。
交通咨询(TA )表示了入侵目标的距离、方位和相对高度(如果已知其高度的)。
解脱咨询(RA )还向机组发出目视的和语音指令,明确那里是离开威胁目标的安全的垂直间隔。
TCAS 还和另一架装有TCAS 的飞机通信,协调其飞行动作防止相撞。
缩略语abs 绝对 abv 高于 ADIRU大气数据惯性基准组件AGL 高于地面 AI 高度指示器 ant 天线34—45—00—001 R e v 6 09/08/2000有效性34—45—00交通警戒和避撞系统 — 介绍arpt 机场ATC 空中交通管制ATCRBS 空中交通管制雷达信标系统 BITE 机内自检设备 blw 低于cds 通用显示系统 CPA 最最接近点 CPU 中央处理器 CTR 中央、中心 DEU 显示电子组件 DME 测距设备、测距仪EFIS 电子飞行仪表系统 Exp 扩展的(扇形的) FDAU 飞行数据采集组件 FL 飞行高度层、飞行高度 FPM 每分钟×英尺,即 尺/分fwd 向前、前方 gnd 接地、地面 GPWC近地警告计算机grd 接地、地面 iIdent 识别、识别码 IF 中频、中间频率 INT 询问机 I/O 输入/输出 L 左LED 发光二极管 max 最大 MHz 兆赫 NCD 无计算数据 NM 海里,即里 norm 正常 R 右 RA 解脱咨询 rel 相对34—45—00—001 R e v 6 09/08/2000有效性34—45—00REU 远距电子组件 RF 无线电射频、射频 R/T 接收机/发射机、收发机 stby 待用 sw 电门 TA 交通咨询 TAS 真空速TAU 到达最近点时间 TCAS 交通警戒和避撞系统 tfc 交通 trk 航迹VOR 甚高频全切信杆 VSI 垂直速度指示器 Wpt 航路点 Xfr 转换 Xpndr 应答机有效性 34—45—00交通警戒和避撞系统 —介绍34—45—00—001 R e v 6 11/15/2000有效性34—45—00TCAS — 概述概述交通警戒和避撞系统(TCAS )向其他飞机发射信号并接收其他飞机的信号,以获取其高度、距离和方位数据。
ATC_TCAS概述

ATC_TCAS概述
ATC(航空交通管制)和TCAS(空中交通碰撞防止系统)是航空领域
中两个重要的安全措施,旨在确保航空器的安全和防止空中碰撞。
空中交通碰撞防止系统(TCAS)是一种主动的防碰撞系统,旨在增强
航空器的安全性。
这个系统通过使用航空器之间的交流,发出警告并提供
避免碰撞的建议。
TCAS通过接收附近航空器的无线电信号和侦测系统,
计算并分析航空器之间的位置和速度,从而确定潜在的碰撞风险。
如果系
统检测到即将发生碰撞的情况,它会发出警告给飞行员,并提供具体的建议,如改变飞行高度或方向。
ATC和TCAS是独立但相互补充的安全措施。
ATC通过监控航空器的飞
行状况、提供导航指令、协调航空器之间的间隔等措施,确保航空器的安全。
而TCAS则在航空器无法与ATC建立有效通信或ATC系统故障时,通
过识别潜在的碰撞风险并提供建议来确保航空器的安全。
这两个系统在不同的层面上工作。
ATC负责监控大范围的空域和多个
航空器之间的交通情况,通过指示航空器选择不同的高度和/或航线来避
免碰撞。
TCAS则在更局部的范围内运行,并专注于检测潜在的碰撞风险,并发出警告和建议给直接相关的航空器。
总之,ATC和TCAS是航空领域中两个重要的安全措施。
ATC通过监控
航空器运动和提供导航指令,确保航空器的安全。
而TCAS作为一种主动
的防碰撞系统,通过警告和建议,帮助航空器避免碰撞风险。
飞机交通咨询和防撞系统介绍与排故
飞机交通咨询和防撞系统介绍与排故飞机交通警戒和防撞系统(Traffic Alert and Collision Avoidance System),一般简称其为飞机防撞系统(TCAS)。
此系统可显示飞机周围的情况,并在需要时提供语音警告,同时帮助驾驶员以适当的方式躲避危险。
TCAS常与电子水平状态指示器(EHSI)配合使用,由于EHSI是飞机航迹的基准和参考,对冲突飞机的位置能够非常直观地反映出来,所以有利于飞行员在第一时间内做出与TCAS的要求一致的本能反应动作,从而避免碰撞的灾难性事故发生。
TCAS 系统对装有信标应答机的飞机进行位置确定和航迹跟踪。
TCAS监视范围一般为前方35英里,上、下方为3000米,在侧面和后方的监视距离较小。
(为了减少无线电干扰,管制条例对TCAS 的功率有所限制。
它把TCAS的前向作用距离限定在45英里左右,侧向和后向作用距离则更小。
)TCAS的询问机发出脉冲信号,这种无线电信号称为询问信号,与地面发射的空中雷达交通管制(ATC)信号类似。
当其他飞机的应答机接收到询问信号时,会发射应答信号。
TCAS的计算机根据发射信号和应答信号间的时间间隔来计算距离。
同时根据方向天线确定方位,为驾驶员提供信息和警告,这些信息显示在驾驶员的导航显示器上。
TCAS 可以提供语言建议警告,计算机可以计算出监视区内30架以内飞机的动向和可能的危险接近,使驾驶员有25-40秒的时间采取措施。
当前,正在研发或使用的TCAS系统有三种类型:TCAS I、TCAS II 。
下面重点介绍TCAS II。
TCAS II是一种比TCAS I更全面的系统。
TCAS II 通常由TCAS计算机单元、S 模式应答机、S模式/TCAS控制面板、TCAS上下天线、驾驶舱显示组件等组成。
它不但向飞行员提供TA,而且将发出决断咨询(RA,Resolution Advisory),即当入侵目标被标绘,系统会告诉飞机是否爬升、下降、直飞或平飞。
TCAS的工作原理

TCAS的工作原理TCAS (Traffic Collision Avoidance System) 是用来防止飞机之间的空中相撞的一种防撞系统。
它在飞行中监测周围的飞机,并提供冲突解决建议,以便飞行员能够采取适当的行动来避免相撞。
TCAS 的工作原理涉及到飞机间的通信、数据交换和算法分析,并需要计算机和雷达等设备的支持。
1.主雷达系统:TCAS系统中的主雷达用来监测周围的飞机。
这个雷达系统负责收集目标飞机的数据,例如飞机的位置、速度和高度等。
这些数据通过雷达系统发送给TCAS的计算机进行分析和处理。
2.数据处理与分析:TCAS系统中的计算机负责接收和分析来自雷达系统的数据。
通过对数据的处理和分析,TCAS系统能够判断周围的飞机与本飞机之间是否存在冲突。
计算机会将这些数据转化为目标飞机的三维坐标和速度等信息,并根据特定的算法来评估冲突的可能性。
3.相撞威胁评估:TCAS系统根据计算机分析的数据,评估目标飞机与本飞机之间的相撞威胁。
这个评估包括计算目标飞机和本飞机之间的距离、速度和高度等信息,并通过算法判断威胁的严重程度。
如果存在潜在的相撞威胁,TCAS系统会发出警告信号。
4.冲突解决建议:在判断出潜在的相撞威胁后,TCAS系统会提供冲突解决建议。
这些建议是基于当前飞机状态和目标飞机的位置等信息而确定的。
冲突解决建议以语音和显示方式告知飞行员,指导他们采取适当的行动来避免相撞。
冲突解决建议通常包括上升、下降或转向等操作,以保持安全的间隔。
5. 目标飞机通信:TCAS系统中的计算机可以通过通信链路与目标飞机的TCAS系统进行通信。
这种通信通常通过应答机(Transponder)进行。
目标飞机的TCAS系统会根据请求发送目标位置和速度等信息给本飞机的TCAS系统,以帮助其更准确地评估冲突威胁。
6.计算机算法:TCAS系统的运行需要一系列的算法来分析和处理数据。
这些算法负责评估飞机之间的距离、速度以及高度等因素,并根据飞机状态和航路等信息进行冲突解决建议的生成。
TCAS介绍

• 8.1TCAS概述 • 8.2工作概况 • 8.3保护空域与灵敏度 • 8.4TCAS信号的格式 • 8.5TCAS基本工作原理
1956年在科罗拉多大峡谷上空两架客机 相撞--航空界开始防撞研究。
60年代末 --航空器防撞系统 70年代 --信标防撞系统 80年代 --空中交通警戒与
功用-----通过应答机相互通话,探测和跟踪邻近 空域。根据接近程度,向机组提供警告和推
荐避让措施。
TCAS的工作概况(实例)
三、TCAS分类
• TCAS I :
只有TA咨询信息,没有RA咨询信息。
• TCAS II:
有TA、RA咨询信息,可提供垂直避让信息。
• 信息,还可 以提供水平避让信息。
四、TCASⅡ所能提供的信息
根据入侵机的相对距离和方位,以及威胁等 级在EHSI 或EADI上显示视觉信息:
Others (其它):相对高度大于1200英尺、小于2700英尺,或距离在6 海里以上。
Proximity (接近):相对高度等于或小于1200英尺,且距离在6海里以 内。
Traffic Advisory (交通咨询):系统判明的与本机存在潜在危险接近 的飞机,TCASⅡ会提前一定时间(20~48秒)发出交通咨询。音频
下降,下降
INCREASE CLIMB… INCREASE CLIMB
增大爬升,增大爬升
INCREASE DESCEND… INCREASE DESCEND 增大下降,增大下降
CLIMB,CROSSING CLIMB… CLIMB,CROSSING CLIMB 爬升,穿越爬升…爬升,穿 越爬升
DESCEND ,CROSSING DESCEND… 下降,穿越下降…
飞行仿真中的TCAS建模方法

飞行仿真中的TCAS建模方法引言TCAS(Traffic Collision Avoidance System,交通冲突避免系统)是一种用于飞行中的航空器避免相互碰撞的主动安全系统。
在飞行仿真中,TCAS是必不可少的模块,帮助飞行员识别并避免潜在的空中碰撞。
本文将介绍飞行仿真中的TCAS建模方法。
TCAS的基本原理TCAS的基本原理是利用雷达或ADS-B等无线电设备来检测周围的航空器,并根据其位置、速度等信息进行分析和决策。
当TCAS系统检测到与自身飞行方向相逆或可能导致冲突的目标航空器时,它会发送相应的冲突避免指令,如冲突告警、指示上升或下降等。
TCAS建模方法在飞行仿真中,TCAS的建模是模拟TCAS系统,包括检测周围航空器、分析目标航空器的运动,以及生成冲突避免指令。
以下是飞行仿真中TCAS建模的主要方法。
航空器模型首先,需要对目标航空器进行建模。
这涉及到确定目标航空器的位置、速度、航向等参数。
可以通过基于物理模型或经验模型来模拟目标航空器的运动。
模型的准确性对于模拟真实的飞行环境非常重要。
数据融合在飞行仿真中,需要将来自不同来源的数据融合起来,以获取更准确的目标航空器信息。
例如,可以融合来自雷达、ADS-B和传感器数据,以获取目标航空器的位置、速度等。
数据融合算法可以根据数据的可靠性和准确性对不同数据进行加权处理。
碰撞检测在TCAS建模中,碰撞检测是一个关键的步骤。
通过分析目标航空器的位置、速度和飞行路径,可以判断是否存在潜在的空中碰撞风险。
常用的碰撞检测算法包括球形碰撞检测法、包围盒碰撞检测法等。
冲突避免指令当TCAS系统检测到潜在的空中碰撞风险时,需要生成相应的冲突避免指令,以防止碰撞发生。
冲突避免指令可以包括冲突告警、指示上升或下降等。
生成冲突避免指令的方法可以基于规则、优化算法或机器学习等。
随机性建模在飞行仿真中,随机性是不可避免的。
例如,飞行器的位置、速度可能受到气流、风速等因素的影响。
交通警戒与避撞系统(TCAS)工作原理及故障分析

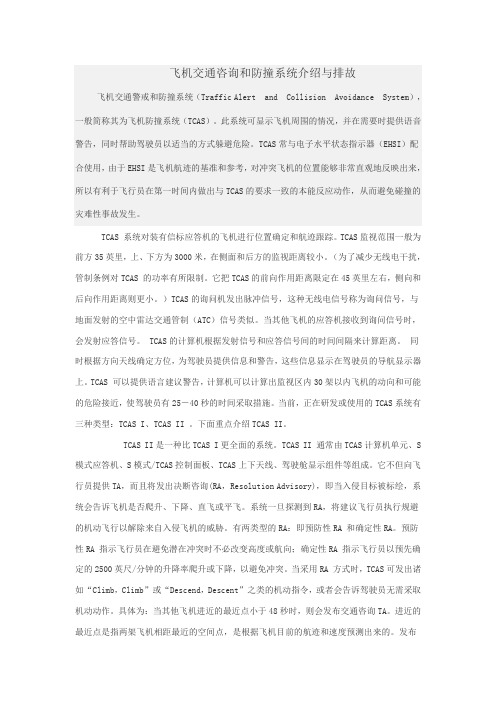
交通警戒与避撞系统( TCAS) 工作原理及故障分析摘要:交通警戒与避撞系统(TCAS)是飞机上的一种航空电子系统,它对飞机的飞行安全起着重要的作用。
本文介绍了TCAS系统的工作原理,并根据实际工作中的排故经验,对TCAS系统的故障进行了故障分析、总结。
关键词:交通警戒与避撞系统;故障分析一、TCAS工作原理1.1 TCAS系统的组成TCAS系统的组成组件有:TCAS计算机;TCAS/ATC控制盒;TCAS的上、下方向性天线。
TCAS计算机:是TCAS系统的核心部件,其主要功能是发出询问信号、接收入侵飞机的应答信号、接收本机其他系统的数字和离散信号、基于本机数据和接收的数据进行计算、产生交通咨询和决断咨询。
TCAS/ATC控制盒:用于驾驶舱人机接口,主要有TCAS方式选择和应答机编码选择等功能。
天线:装有上下两部天线,天线为四单元相控阵天线,使用四根同轴电缆与TCAS计算机相连。
用来发射TCAS计算机的询问信号,和接收入侵飞机发射产生的应答信号并送到TCAS计算机。
1.2 基本原理。
TCAS计算机向其它飞机发送询问信号并接收其它飞机来的应答信号,以获取其高度、距离和方位数据。
TCAS利用这些数据以及从机载飞机系统输入的其它数据进行计算该飞机目标是否构成碰撞威胁,并提供目标位置的目视指示以及交通避撞警戒的目视和语音信息。
二、TCAS常见故障分析TCAS系统的故障在表现形式上,一般在EHSI上显示“ TCAS FAIL”信息。
通过维护手册,根据故障原因再结合工作中遇到的实际情况,我们总结了一些常见的故障源来分析它们的特点。
2.1 TCAS计算机故障TCAS计算机是TCAS系统的核心,其精度要求较高。
在飞机上由于空气气流、颠簸、高空辐射、电磁干扰等客观因素,决定了TCAS计算机在这种恶劣的工作环境中,其故障率也特别高。
这其中包括硬件故障和软件故障两种,硬件故障的判断比较容易,借助计算机内部的自检软件可以明确测试出。
tcas工作原理

tcas工作原理
TCAS(Traffic Alert and Collision Avoidance System)是一种飞机防撞预警系统,其工作原理如下:
1. 雷达(或ADS-B)侦测:飞机上的TCAS系统通过雷达或ADS-B技术侦测周围飞机的位置和速度信息。
2. 监视和跟踪:TCAS系统通过监视和跟踪周围飞机的位置和速度来判断与自身飞机的飞行路径是否存在碰撞危险。
3. 冲突解决算法:如果TCAS系统检测到与其他飞机存在碰撞危险,它将使用一种冲突解决算法来计算避免碰撞的最佳行动。
4. 冲突解决指令:根据算法计算结果,TCAS系统会通过声音警告和显示屏上的指令,向飞行员发出避免碰撞的指令,如上升或下降。
5. 飞行员操作:在接收到避免碰撞的指令后,飞行员必须按照指令执行相应的操作,以避免与其他飞机发生碰撞。
总体上,TCAS系统通过侦测和跟踪周围飞机的信息,并使用冲突解决算法来提供飞行员与其他飞机之间的避免碰撞指令,以确保飞行安全。
空中防撞系统

TCAS概述
❖ TCAS I能够侦测上下7000至10000呎,前后15至40海里,发现有航机 接近时,会提前40秒警告飞行员对方飞机的高度和位置。
❖ 第二代空中防撞系统(TCAS II),是目前最被广泛使用的,会用声 音及显示警告飞行员,称为Resolution Advisory (RA),并且会用 语音指示避撞的动作,例如:“Climb!Climb!Climb!”“Descend! Descend!Descend!”。别架飞机若有装TCAS,也会有相反的警告发 出来。
Aural annunciation: "Traffic, traffic” Intruder: solid amber circle Helps to the visual acquisition of the intruder Prepares the crew for a possible RA No maneuver should be made if there is no visual
FL ou «Z » SL radiosonde
FL > 420
7
FL200~420
7
FL100 ~ 200 6
FL50 ~ 100
5
2350ft ~ FL50 4
10000 ft
2
TA
RA
TAU (s)
48
DMOD (NM)
1.3
ZTHR (ft)
1200
TAU (s) vtt*
空中防撞系统 TCAS
Contents
❖ Introduction to TCAS ❖ Function of TCAS ❖ TCAS Aler Area ❖ TCAS Information ❖ Principle of TCAS ❖ TCAS Components ❖ TCAS Interface ❖ TCAS Signal formats ❖ TCAS Display
TCAS

一、填空题1、TCAS的防相撞原理是建立在防撞系统中一项重要的发展即范围/范围率的概念。
这个概念的基础是相遇中距最接近点的时间而不是距离。
2、S模式应答机使用离散地址通信技术可以使两架有冲突的TCAS 飞机完成高可靠性的避让机动协同。
3、TA用于帮助飞行员对侵入飞机进行目视搜寻并让飞行员为潜在的决策咨询RA做准备。
4、RA推荐飞机机动来增加或保持与侵入飞机之间的垂直间隔。
当侵入飞机同样安装有TCASⅡ时,两个TCAS通过S模式数据链能协同他们的决策咨询RA,以保证选择互补的决断方向。
5、TCASⅡ设计能运行的飞行密度为0.3架/平方海里,或半径5海里内24架飞机,TCAS能同时对监视范围内至少30架装有应答机的飞机进行跟踪,这是预测未来20年内终端区可能的最大飞行密度。
6、研究表明TCASⅡ也会造成一些严重的危险,TCAS出现空中危险接近不显示的概率小于10%。
7、对ATC雷达的分析表明,在90%的情况下,化解RA需要的垂直高度偏离都小于300英尺。
在这种研究基础上的结论是:对TCAS的RA进行反应而导致一架飞机侵入另一架飞机保护空域的可能性是很小的。
但是实践经验表明,对RA进行反应而导致的高度改变往往远大于300英尺,导致了TCAS对管制员和空管系统也有一些不利的影响。
8、美国是ICAO国家中第一个强制要求在其空域飞行的客机安装机载防撞系统的。
促使ICAO建议从2003年起在全世界所有的飞机上安装ACASⅡ,包括货机。
从2000年1月1日起,民航所有最大起飞重量超过15,000公斤或最大核准乘客座位多于30座的固定翼涡轮动力飞机,必须安装版本7的设备TCASⅡ;从2005年1月1日起,民航所有最大起飞重量超过5,700 kg或最大核准乘客座位多于19座的固定翼涡轮动力飞机,必须安装版本7的设备TCASⅡ。
9、TCAS使用改良的C模式询问机向附近的A/C模式应答机进行询问。
这类应答机的询问频率是每秒钟一次。
TCAS

“TCAS”是英文“TRAFFIC ALERT AND COLLISION A VOIDANCE SYSTEM ”的缩写。
中文通常译为“交通警戒及防撞系统”,或简称为“防撞系统”。
随着现代飞机数量的日益增加,空域中飞机的密度增大,使飞机非安全接近的可能性大大增加。
为了避免飞机之间危险接近或碰撞的情况发生,现在的各型民用客机都安装了TCAS系统。
TCAS 系统的功用是,向邻近的飞机发出询问信号,通过入侵飞机的机载应答机系统(ATC)对询问信号的应答,获得入侵飞机的代码、高度、航向和其他数据。
TCAS计算机通过数据分析,判断出入侵飞机相对本机的威胁等级。
如果存在潜在的威胁,TCAS系统将向驾驶员发出咨询提示,或发出垂直机动指示,指导驾驶员,避免与入侵飞机发生冲突。
如果不存在威胁,TCAS系统将显示入侵飞机的相对位置和轨迹。
TCAS 系统作为现代飞机的重要机载电子设备,具有探测范围大,探测精度高,反映速度快以及显示清晰易辩读等特点。
它的突出表现和卓越性能,越来越受到广大飞行人员和地面交通管制人员的喜爱和依赖。
是飞机安全飞行的重要帮手。
但是与TCAS系统的卓越表现相对应的,是其复杂的系统交联和内部构造,对系统维护和故障排除提出的更高要求。
TCAS系统对信号的灵敏度和精度有很高的要求,大量的数据计算是其提供高精度电子识别的基础,再加上机上复杂恶劣的电磁环境,造成了各型飞机上TCAS系统故障率相对较高的情况。
作为系统维护工程师,在对TCAS系统进行维护过程中,应该采取什么措施,避免这种高故障率的发生呢?在故障发生后,应如何采取排故方案,使故障在最短时间内得到处理呢?现在,让我们以737-300型飞机为例,对TCAS系统的概况进行阐述。
一、系统组成:TCAS 系统的主要由以下部件构成:1、TCAS 处理器(或计算机);是TCAS系统的核心部件,其主要功能是发出询问信号、接收入侵飞机的应答信号、接收本机其他系统的数字和离散信号、基于本机数据和接收的数据进行计算、产生交通咨询和决断咨询。
tcas 标准

tcas 标准TCAS(Traffic Collision Avoidance System)是一种空中交通碰撞避免系统,主要用于飞机之间的空中交通冲突避免。
它是目前世界上航空器上安装规模最大的、应用最广泛的航空安全设备之一。
TCAS旨在通过提供良好的避免措施来减少飞机之间的冲突风险,保障航空交通的安全。
TCAS标准提供了与其他飞机的领域内和领域外交流,以及与地面控制的交流。
通过这些交流和共享的数据,TCAS能够提供准确的空中交通信息和冲突预警,并向驾驶员提供相关建议。
该系统通过使用雷达和全球定位系统(GPS)等技术手段,实时监测飞机的位置、速度、高度等参数,从而确定可能出现冲突的目标。
TCAS系统可分为TCAS I和TCAS II两种类型。
TCAS I主要用于民航飞机,能够标识潜在的冲突目标,并为驾驶员提供相关警告。
而TCAS II不仅能够提供冲突目标警报,还可以根据冲突的严重程度向驾驶员提供具体的指示,以帮助驾驶员进行适当的避免行动。
TCAS系统通过两个操作模式来实现交通冲突避免。
当飞机与其他目标之间存在冲突时,系统将进入“协同操作模式”。
在这种模式下,TCAS会与其他飞机的TCAS系统进行通信和协调,以制定出避免冲突的行动方案。
当两个飞机间的水平距离足够近时,TCAS系统会向驾驶员发出警告,指示其适当地上升或下降,以避免撞击。
与此同时,TCAS系统还能通过监测其他飞机的运动状况来保持飞机之间的最佳间隔。
当飞机与其他目标之间没有冲突风险时,系统将进入“独立操作模式”。
在这种模式下,TCAS系统会根据飞机的位置和速度自动计算出最佳的爬升或下降速度,以保持安全间隔。
TCAS标准的提出和应用,使得空中交通事故的发生率得以大幅降低。
这一系统的成功应用不仅极大地提高了飞行安全水平,也为航空运输业提供了巨大的推动力。
随着技术的不断发展,TCAS系统也在不断进行升级和改进,以满足日益增长的航空交通需求。
总而言之,TCAS标准是一种在航空器上广泛应用的空中交通碰撞避免系统。
TCas期刊发表周期

TCas期刊发表周期TCas期刊是电子和电气工程师协会(IEEE)旗下的一个重要学术期刊,它涵盖了电子、电气工程领域的多个重要研究方向。
对于很多科研工作者来说,能够在TCas期刊上发表论文是一种荣誉,也是对自己研究成果的认可。
然而,很多人对于TCas期刊的发表周期并不是很清楚,接下来我们就来详细介绍一下。
TCas期刊的发表周期主要取决于稿件的审稿和编辑过程。
一般来说,作者首先需要将自己的论文投递到TCas期刊的编辑部,然后经过编辑部的初审,如果初审通过,就会进入到专家学者的审稿环节。
在这个环节中,专家学者会对论文的学术质量、创新性、实用性等方面进行评审,如果论文通过了专家学者的评审,就会进入到编辑修改阶段。
在这个阶段,编辑会对论文的语言、格式、图表等方面进行修改和规范,确保论文符合期刊的要求。
最后,经过编辑的最终审定,论文就会正式发表在TCas期刊上。
整个审稿和编辑过程通常会耗费一定的时间,因此TCas期刊的发表周期相对较长。
一般来说,从投稿到最终发表,需要6个月到1年的时间。
当然,这只是一个大致的时间范围,实际的发表周期还会受到一些其他因素的影响,比如投稿时的期刊审稿量、审稿专家的评审速度等等。
对于很多作者来说,这样相对较长的发表周期可能会让他们感到有些焦虑,但是我们也要明白,TCas期刊之所以能够保持较高的学术水准,正是因为它对于每一篇论文都进行了严格的审稿和编辑,确保了期刊的质量和学术影响力。
因此,我们应该对于发表周期保持理性的认识和期待,做好充分的准备和耐心等待,相信自己的研究成果最终会得到应有的认可和回报。
总的来说,TCas期刊的发表周期虽然相对较长,但是这也是为了保证期刊的学术水准和质量。
对于作者来说,应该对于发表周期保持理性的认识和期待,做好充分的准备和耐心等待。
同时,我们也希望TCas期刊能够在未来进一步优化审稿和编辑流程,缩短发表周期,让更多优秀的研究成果能够更快地被学术界和社会认可和应用。
TCAS告警研究分析及处置

TCAS告警研究分析及处置一、TCAS 告警原理机制TCAS通过询问和监听周围飞机的ATC应答机,来监视本架飞机周围空域中其他飞机的存在,位置及运动状况。
(1)根据发射信号和应答机信号间的时间间隔来计算入侵飞机和本机的相对距离。
(2)根据方向天线对确定入侵飞机的相对方位。
(3)从入侵飞机应答机信号中获得入侵飞机的高度。
下图为TCAS TA和RA检测的水平和垂直范围示意图TCAS检测水平与垂直断面TCAS在不同高度具备不同的告警设置参数如下:其中SL为灵敏度,是在不同条件下对触发TA/RA的告警控制。
SL1:STAND BYSL2:TA ONLYSL2-SL7:根据高度自动选择TAU为飞机至最接近点所需的时间估计,江北机场海拔高度在415m,两机触发的TCAS RA告警阈值在短五边满足1000-2530ft高度层,敏感级为3。
二、TCAS虚警分析TCAS 虚警和TCAS真实告警一般有如下区别,真实的TCAS告警判明有与本机在潜在的危险接近的飞机时,会提前20-48秒发出TA警告,在TA发出后本机对入侵飞机连续监视大约15秒钟后,如果入侵飞机与本机的危险接近情况仍然存在,则TCAS会发出RA告警。
虚假TCAS 警告出现TA 和 RA 之间的时间间隔很短(几秒钟) , 或者直接出现RA 而不出现TA ,或者在本机周围空域无其它飞机的情况下发出TA .虚假的T CAS 告警往往是突然出现的RA ,RA 会持续时间很短(一般几秒钟)就消失了。
TCAS虚警通常会有以下原因(1)TCAS因本机设备原因收到本机应答机回答的信号。
包括应答机抑制失效、本机应答机高频率和连续的C模式询问等情况。
(2)TCAS收到了其他飞机带有错误的应答机信号。
包括其他入侵飞机带有错误的高度编码器,地面ATC测试,或者假目标假信号,分离信号等。
(3)TCAS使用的1030/1090MHZ无线电频率受到干扰。
三、国内TCAS虚警案例分析(一)2015年昆明长水机场实施独立独立平行进近以后,发生了多起TCAS RA告警,导致飞机中止进近并复飞的事件时有发生,对机场运行带来了较大影响。
TCas期刊发表周期

TCas期刊发表周期TCas期刊是电子与计算机工程师协会(IEEE)旗下的一个重要期刊,它是电子与计算机工程领域的顶级期刊之一,发表的论文涵盖了电子技术、通信技术、计算机技术等多个领域。
对于很多研究人员来说,能够在TCas期刊上发表论文是一种荣耀和肯定。
然而,对于很多作者来说,TCas期刊的发表周期一直是一个比较关心的问题。
那么,TCas期刊的发表周期究竟是怎样的呢?首先,我们需要了解TCas期刊的发表形式。
TCas期刊是一个半月刊,也就是说,它每个月会发表两期。
这种发表形式相比于一些季刊或者年刊来说,发表周期更为频繁,这也意味着作者们有更多的机会将自己的研究成果及时地分享给同行。
同时,对于读者来说,也能够更快地获取到最新的研究成果和技术进展。
其次,TCas期刊的投稿和审稿周期也是作者们比较关心的问题。
一般来说,作者在完成论文后会选择在线投稿到TCas期刊的官方网站。
在提交后,编辑部会对论文进行初步审查,确定是否符合期刊的发表要求。
如果初审通过,论文将进入匿名审稿阶段。
在这个阶段,TCas期刊会邀请相关领域的专家学者对论文进行审稿。
审稿周期一般为2-3个月,具体时间会根据审稿人的审稿速度和论文的修改情况而有所不同。
如果论文被接受,作者需要对论文进行修改,并按照期刊的格式要求进行排版。
整个投稿到最终发表的周期一般为6-8个月。
最后,我们需要了解TCas期刊的发表通知周期。
一般来说,当论文最终被接受发表后,TCas期刊会在1-2个月内通知作者,并安排论文的具体发表时间。
在这段时间内,作者可以根据期刊的要求准备好发表所需的材料,比如摘要、关键词、作者简介等。
同时,作者还需要缴纳发表费用,这也是发表周期的一个重要环节。
综上所述,TCas期刊的发表周期一般为6-8个月,其中包括投稿审稿周期和发表通知周期。
对于很多作者来说,这个周期可能有些长,但也是比较正常的。
在等待的过程中,作者们可以继续深入研究,完善论文,为将来的投稿做好准备。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(3)相对高度:“+”表示对方高于本机;“-”表示对方低于本 机。 (4)升降速度:当相遇飞机的相对升降速度等于或大于500英尺/分 时以向上或向下的箭头表示。 (5)无方位飞机信息是以字符方式显示的该机的距离和相对高度。 字符为黄色表示交通咨询;决断咨询字符为红色。 (6)超显示范围飞机信息以“OUT OFF SCALE”(“超出显示范围”) 表示。 (7)威胁提醒:在出现交通咨询或解脱咨询的时,显示黄色或红色 的“TRAFFIC”(“交通”)字符。 (8)模式信息:按下EFIS控制合上的TFC(交通)按钮,才可能在 显示器上显示TCAS信息。此时,EHSI上显示绿色的“TFC”(“交 通”)。
17
三、TCAS计算机与其它系统的交连
输入信息
• 主要包括无线电高度、航向、大气数据计算机产生的有关本机的 高度、速度、升降速度等信息。
L波段设备的相互抑制
• 飞机上的两部应答机、两部测距机和TCAS均工作于L波段。为避 免相互干扰,同一时刻只应有一部处于发射状态。在五部L波段 设备中的一部开始发射之前,产生一个宽度为28μs的外抑制波 门加到其它L波段设备,以避免其它L波段设备进入发射状态,并 保护其接收设备。
二、地图方式
气象雷达的“地图”(MAP)方式用于观察飞机前下方的 地表特征图形,诸如山峰、河流、湖泊、海岸线、大城市 等的地形轮廓图像。
23
三、湍流方式
湍流区域中的气流运动急速多变,方向变化不定。 气象雷达工作于湍流方式时,雷达能检测出危险的湍流区 域,将其显示为明显的品红色图象或白色图象。气象雷达 湍流方式的检测距离通常为40海里。
(1)入侵飞机的相对位置。 (2)威胁等级——以四种不同的符号来表示对本机威胁等级不同的 飞机: • 一般(其它)飞机以空心的菱形图案表示; • 邻近飞机显示为实心的菱形; • 发出交通咨询的飞机的图象为黄色的圆形; • 交通咨询伴随有语音提醒信息“TRAFFIC,TRAFFIC”(“交通,交 通”)。 • 解脱咨询的飞机为红色的矩形图案。
3.8 避撞系统
3.8.1 TCAS的功用 TCAS的功用
一、机载防撞系统的功用
TCASⅡ可提供本机邻近空域中的交通状况显示,发出交通 咨询TA并能在确实存在潜在的危险接近时提前向机组发出 决断咨询(解脱咨询)RA。 TCASⅡ所提供的决断咨询回避措施为垂直机动咨询:爬升 (clime)或下降(decent)。
20
三、跟踪与显示能力
TCAS计算机的最大监视能力可达30架。 TCAS计算机的最大跟踪能力为每平方海里0.32架,即5海 里×5海里范围内最多可跟踪8架。
21
3.9 气象雷达系统
3.9.1 气象雷达的功用
一、气象雷达的功用
机载气象雷达系统用于在飞行中实时地探测飞机前方航 路上的危险气象区域,以选择安全的回避航路,保障飞 行安全。 工作方式有“气象”、“气象与湍流”、“地图”等几 种。
14
(3)XPNDR(应答机)
• 工作方式开关置于(应答机)位时,应答机处于全功能状态, 可以正常应答模式A和模式C的询问。
(4)TA(交通咨询)
• 此时在应答机正常工作的基础上,TCAS也正常工作,可在需 要时产生交通咨询, 但仍不能产生解脱咨询。
(5)TA/RA(解脱咨询)
• 工作方式开关置于TA/RA(解脱咨询)位,应答机和TCAS均处 于全功能状态。
16
二、TCAS的询问信号
1、模式A、C呼叫询问
• TCAS计算机通过模式A、C询问,获得相遇飞机的信息,计算该飞 机的距离,并利用方向性天线来测量其方位。
2、TCAS对模式S应答机的询问与信息获取
• TCAS计算机按24位地址码对这类飞机进行S模式的询问,获得该 机的高度信息,计算该飞机的距离,并利用方向性天线来测量其 方位。 • 在相遇飞机的应答机为S模式应答机且装备TCAS的情况下,本机 的TCAS计算机即可与该机建立基于S模式数据链的空-空协调关系。 • 空-空协调关系建立后,双方的TCAS计算机即可确定由哪一方来 控制回避机动,并保证所发出的垂直避撞机动咨询为互补性的。
13
三、XPNDR/TCAS控制盒
1、工作方式开关 工作方式开关用于选择应答机和TCAS的工作方式与功 能。 (1)STBY(准备)
• 工作方式开关置于STBY (准备)位时,应答机和TCAS发射机均 不发射,但能接收。此时系统处于准备状态。
(2)ALT RPT OFF(不报告高度)
• 此时应答机系统处于模式A方式,可以正常应答模式A的询问, 但不会应答模式C的询问。TCAS发射机仍处于准备状态。
3、UPPER ANT(上天线)
• UPPER ANT(上天线)红色指示器亮表示TCASⅡ收发机的上天 线故障
11
4、LOWER ANT(下天线)
• LOWER ANT(下天线)红色指示器亮表示TCASⅡ收发机的下天线故 障。
5、RAD ALT(无线电高度)
• 当TCAS计算机无法获得由无线电高度表所提供的无线电高度信息 时,RAD ALT(无线电高度)指示器亮。
四、测试方式
在测试方式,有的雷达发射机所产生的射频能量被引导到 等效负载上去耗散掉,天线并不向外辐射能量。有的雷达 则使发射机工作约1秒钟,以检查收发组工作状况。
24
3.9.2 气象雷达的基本组成
一、气象雷达系统的组成
雷达收发组 雷达天线组 显示器与控制盒 波导系统
25
二、雷达收发组
现代气象雷达发射电路通常采用主振-放大式发射电路。 气象雷达接收机的基本任务是从杂乱的噪生背景中检测 出微弱的目标回波来,产生视频回波信号输送被显示器。
3
4
三、TCASⅡ在EADI上提供的信息
EADI可用于显示TCAS所发出的解脱咨询信息。 解脱咨询信息是本机为回避入侵飞机所应采取的垂直机动 措施,如爬升、下降等
5
四、EFIS控制合对TCAS显示的控制
由于TCAS系统需利用 EHSI和EADI来显示交通咨询和解脱 咨询等信息,所以与EFIS控制合的上的有关控制元件的 设置有关。 (1)EHSI的工作模式
1
二、TCASⅡ在EHSI上提供的信息
TCASⅡ能提供入侵(相遇)飞机的相对位置等图象信息, 相关的字符信息,以及与交通咨询、解脱咨询相关联的语 音提醒信息等,显示在TCAS的专用显示器、电子飞行仪表 系统或其它显示器上。 显示在EHSI或导航显示器ND上的TCAS信息主要是入侵飞机 的图像及其相对位置、威胁等级等。
22
一、气象方式(WX)
此方式的功用是在飞行中连续地向飞行员提供飞机前方航 路及其两侧扇形区域中的气象状况及其它障碍物的平面显 示图象。 可有效探测降水区、潮湿的冰雹、湿性湍流、风切变等目 标的存在,提供目标的强度、距离、方位信息。 对云雾、雪花等不能有效探测,对晴空湍流也不能检测。 机载气象雷达还能有效地发现航路上的山峰、相遇飞机等 目标。但绝不能把气象雷达作为地形回避设备或防撞引导 设备来应用。
来自近地警告系统的抑制信号
• 近地警告系统的产生的“低于下滑道”、“拉起”和“风切变” 警告信息的优先权高于TCAS的咨询信息,所以,在近地警告系统 发出上述三种警告信号时,会抑制TCAS输出交通咨询和解脱咨询。
18
3.8.4 监视能力与τ的概念 监视能力与τ
一、监视空域
TCAS的监视空域为环绕本机的立体空域,TCAS所监视的 本机前方距离可达30海里。 通常监视距离为14海里。
三、雷达天线组
气象雷达所使用的天线有平板型天线和抛物面天线两类; 现代气象雷达均应用平板型天线。 波瓣宽度一般为3∼5°。 为维护方便,天线组件上装有方位扫掠控制开关:将开 关扳至断开位,即可停止天线的方位扫掠。
26
平板型天线
27
三、显示器与控制盒
彩色显示器在显示气象目标时通常用绿、黄、红色来 表示强度逐渐增大的降水区域。 在显示地面目标时,通常用蓝绿色、黄色、品红色来 代表反射强度不同的地面目标。 彩色WXR所显示的目标图像的亮度与目标的距离、面积、 降雨率无关
6、HDNG(航向)
• TCAS计算机所需的航向数据是由惯性基准组件提供的。在无法获 得由惯性基准组件提供的航向数据时,HDNG(航向)指示器亮。
8、R/A(解脱咨询)
• 在TCAS计算机所输出的解脱咨询信息不能正常输出到相应的显示 器上显示时,R/A红色指示器亮。
9、T/A(交通咨询)
• T/A红色指示器亮表示TCAS计算机所输出的交通咨询信息不能正常 输出到相应的显示器上显示。
19
二、τ的概念
TCAS计算机中所进行的监视与跟踪计算的基础,是基于 对入侵飞机接近率的连续监视,TCAS计算机提前发出TA、 RA的时间称为TCAS的τ。 在TCAS计算机发出交通咨询TA并进而发出决断咨询RA后, 从飞行员意识到潜在的危险并按照决断咨询RA采取机动 回避措施,到使飞机改变当前的飞行高度而脱离危险, 是需要一定的时间的。 TA门限为20—48秒,RA为15—30秒。 从TCAS计算机发出交通咨询TA到发出决断咨询RA的间隔 时间为15秒左右。 τ取决于目标的距离接近率与距离,其关系如下: τ= 距离/距离接近率 TCASⅡ发出交通咨询TA的高度范围为±1200英尺。
10、TEST按钮
• 按下TEST按钮,即可启动TCAS计算机的全面自检。 • 在按下TEST按钮、TCAS的自检过程中,所有的状态显示器先全部 亮约1秒;然后全部断开;此后,才显示系统当前的工作状态。 12
二、两部方向性天线
TCAS利用其方向性天线实现与相遇飞机的询问-应答, 并获得目标的方位信息。 TCARS的方向性天线内部设有四个辐射单元,这四个辐 射单元互成900,分别指向飞机的前、后、左、右。 每部天线通过四根同轴电缆与TCARS收发案相连接,每 根同轴电缆的接头标有顺序号,且所涂的颜色不同,安 装时应注意。