远程低速UUV纵向操纵性研究
UUV与AUV国内外发展情况
USV与AUV国内外发展情况一、USV国内发展情况1.1上海海事大学“海腾01”上海海事大学日前对外发布最新科研成果,由该校科学研究院航运技术与控制工程交通行业重点实验室无人水面艇课题组开发研制的“‘海腾01’号智能高速无人水面艇”成功落水。
作为国际研究热点,“海腾01”号瞄准世界最先进无人水面艇技术,开发具有全天候、高海况下自主航行,实时进行水面监视监测、水下测量勘探功能,多操控模式、大载荷特点的高速无人水面艇。
“海腾01”号可在海事巡航、航道测量、水文监测、水面防污染监测、进出港与过境船舶监测监视、水上消防、水上溢油控制与回收、海上搜寻救助、沉船勘探打捞、水上反恐、专属经济区守护与活动取证、海洋资源调查与取样等领域无人作业。
该项目获得2010年中央财政支持地方高校发展专项资金支持,并在国内首次实现海上溢油处理水面机器人技术及其装备的试验性应用。
据介绍,“海腾01”号智能高速无人水面艇长10.5米,宽3.6米,满载排水量8.5吨,吃水0.8米。
使用喷水推进,最大航速40节,巡航速度30节。
由艇体、推进系统、能源系统、导航系统、通讯系统、控制系统和任务系统等组成。
具有全自航模式、半自航模式和全遥控模式三种工作模式。
配备有毫米波雷达、激光雷达、前视声纳、立体视觉和360度监控摄像机等监测设备,可进行水上和水下障碍物的全方位探测。
并通过多源信息融合提高障碍物探测的准确性和可靠性,为自主避障提供足够信息。
“海腾01”号既可无人驾驶,也可人工驾驶,驾控台上的人工驾驶具有最高优先级,便于无人艇调试过程中的监控与紧急情况处置。
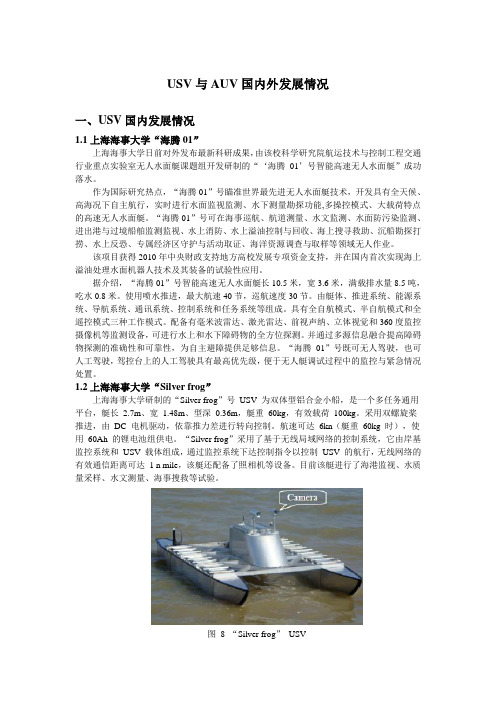
1.2上海海事大学“Silver frog”上海海事大学研制的“Silver frog”号USV 为双体型铝合金小船,是一个多任务通用平台,艇长2.7m、宽1.48m、型深0.36m,艇重60kg,有效载荷100kg。
采用双螺旋桨推进,由DC 电机驱动,依靠推力差进行转向控制。
航速可达6kn(艇重60kg 时),使用60Ah 的锂电池组供电。
一种新型油电混合动力技术在UUV平台的应用

一种新型油电混合动力技术在UUV平台的应用发布时间:2021-04-02T14:20:58.857Z 来源:《科学与技术》2020年第31期作者:王同春[导读] 传统的小型无人艇、UUV、USV等平台一般采用柴油机推进。
王同春中国船舶集团有限公司第七一〇研究所,湖北宜昌 443003摘要:传统的小型无人艇、UUV、USV等平台一般采用柴油机推进。
但由于柴油机自身的振动及噪声,使其在声纳探测等应用领域的发展受到了严重制约。
为解决小型无人艇、UUV、USV等平台的减振降噪问题,本文提出一种新型油电混合动力系统。
该系统主要由高速柴油机、永磁发电机、整流器、蓄电池组及其控制器、推进电机等部分组成,不仅体积小、重量轻,与传统的柴油机推进系统相比,可根据不同的作业任务调整工作模式,从而大大降低了平台在声纳探测等应用场景下的噪声。
本文首先介绍了该电力推进系统的组成及工作原理,并就整流技术、配电模式、蓄电池管理、电力推进、能源综合管控等方面进行研究,对提出的电力推进系统设计方案进行了详细阐述。
关键词:减振降噪;电力推进;永磁同步电机;矢量控制1 引言传统的小型无人艇、UUV一般采用柴油机直接驱动螺旋桨,其优点是功率密度大、操控性好、适应性强、维修保障方便;但其缺点也不容忽视:由于柴油机振动及噪声幅值偏高,导致平台自身噪声极高,减振降噪十分困难,当声纳探测作业时矛盾尤其突出。
为解决小型无人艇、UUV、USV等平台减振降噪的难题,采用全电力推进方案十分必要。
本文题研究的“电力推进系统”要求体积小、重量轻、噪声低、适应性强,能在各种平台间通用。
本研究拟采用高速柴油机与永磁同步发电机成套,以大幅减小机组尺寸重量。
就通气管状态下柴油机工作稳定性、安全性、适应性等方面进行研究;通过理论计算柴油发电机组的振动、扭转振动参数,选择适宜的弹性联轴节;在变转速及变工况条件下测试机组的振动、噪声及扭转振动参数;测定柴油发电机组的负载特性、电压调整率等重要参数,为电力变流装置设计输入提供技术支撑;将柴油发电机组安装到特定的独立舱段,采用强迫水冷,测定柴油发电机组的背压、散热、油耗、输出功率等工作边界。
UUV现状报告

由于UUV在军事方面应用的重要性,各国都在不断地研究各种先进的UUV来增强国防实力,它在军事方面的应用主要包括水下搜索、监视、侦察、猎雷、作战海洋学、通信、导航、反潜作战等。美国应用在军事上UUV的数量在不断增多,国内有众多的研究机构如WHOI、MBARI、MIT等,研制了大量的UUV其中包括“短期水雷侦察系统”(Near—Term Mine Reconnaissance,NMRS)、“长期水雷侦察系统” (Long—Term Mine Reconnaissance System,LMRS)和REMUS
我国拥有32 000km的海岸线和300×104k㎡以上的蓝色国土,蓝色国土约为我国陆地国土面积的三分之一,在这辽阔的海域内蕴藏的极其丰富的资源,仅以油气资源为例:已探明的石油储量达(150~200)×108t,天然气储量63 000×108m3。这些资源是中华民族未来赖以生存和发展的物质基础。
浅谈UUV设备的发展现状
1. 引言
海洋是生命的摇篮、资源的宝库、交通的要道,也是兵戎相见的战场。21世纪人类将面临人口膨胀和生存空间有限的矛盾,陆地资源枯竭和社会生产需要增长的矛盾,以及生态环境恶化和人类发展的矛盾这三大挑战。占地球表面积7l%的海洋,是一个富饶而远未得到充分开发的宝库。人类要维持自身的生存、繁衍和发展,就必须充分利用海洋资源,这也是人类无法回避的必然选择。对人均资源不丰的我国来说,海洋开发更具有特殊的意义[1,2]。
认识海洋、开发海洋需要各种高技术手段,发展这些手段是建设海洋强国、捍卫国家安全和实现可持续发展的伟大目标所必不可少的。作为探索海洋空间的最重要手段之一的水下机器人技术应运而生。
2. UUV的研究动态与水平 Nhomakorabea无人水下航行器(Unmanned Undersea Vehicle,UUV)的研究工作开始于20世纪中期。美国上世纪60年代研制的遥控水下航行器(Remote Operated Vehicles, ROV)就参与了打捞沉入地中海870m海底处的氢弹事件。1974年美国使用“探险者”号UUV参与打捞了沉没在夏威夷海域的苏联潜艇。进入21世纪以来,世界上已有10多个国家的1000余艘各种用途的UUV投入到军用或民用的领域。 由于AUV在军事和科学研究方面的重要性,在过去的十年中,全世界大约有60个AUV研制计划,并建造了大约200个AUV(大部分为实验用)[3],但是随着技术的成熟和近海工业发展的需要,商业用途的AUV也开始出现,并且在不断地发展和壮大。
uuv的工作原理

uuv的工作原理UUV的工作原理一、引言无人水下航行器(Unmanned Underwater Vehicle,简称UUV)是一种能够在水下进行任务的自主移动机器人。
它具有多种用途,如海洋探测、水下勘测、海洋科学研究、海底资源开发等。
本文将从UUV的工作原理角度介绍其基本构成和工作过程。
二、UUV的基本构成UUV主要由以下几个部分组成:1.机体结构:UUV的机体结构通常采用轻质材料制作,以提高机器人的机动性和耐用性。
机体上设有各种传感器和执行器,用于感知和执行任务。
2.动力系统:UUV的动力主要来自于电池或燃料电池。
电池提供能量给电机驱动推进器,使UUV在水下前进。
燃料电池则以氢气和氧气为燃料,通过化学反应产生电能。
3.导航系统:UUV的导航系统包括惯性导航系统(Inertial Navigation System,简称INS)、全球定位系统(Global Positioning System,简称GPS)以及水声导航系统。
INS通过测量加速度和角速度来估计UUV的位置和姿态;GPS用于在水面上获取全球定位信息,进而提供精确的位置和导航数据;水声导航系统则利用水声信号进行通信和导航。
4.感知系统:UUV的感知系统包括声纳、摄像头、激光雷达等传感器。
声纳用于探测水下的障碍物和地形;摄像头用于拍摄水下景物和监测周围环境;激光雷达则可以进行三维感知和距离测量。
5.控制系统:UUV的控制系统负责协调各个部件的工作,实现对UUV的精确控制。
控制系统接收来自感知系统和导航系统的数据,并根据事先设定的任务要求,通过控制执行器来调整UUV的运动和姿态。
6.通信系统:UUV的通信系统用于与地面或其他水下设备进行数据交换和远程控制。
通信方式包括无线电通信、水声通信和光纤通信等。
三、UUV的工作过程UUV的工作过程可以分为四个阶段:任务规划、航行、探测和数据传输。
1.任务规划:在任务规划阶段,操作员通过地面控制站与UUV进行通信,设定任务目标和路径。
UUV操纵性能综合优化模型研究
俞强, 杨松林, 辛磊
要: 操纵性能是无人潜器 (UUV) 航行的重要性能之一, 其优劣直接影响到 UUV 的航行安全和稳定性, UUV
模型。采用模糊评判方法构造操纵性系统总目标函数, 利用专家咨询法确定了各子系统的权重; 通过大量艇体
摘 操纵性能评判和优化是 UUV 优化设计的重要组成部分。基于 AUTOSUB 型无人潜器的设计模型, 在充分分析 艇体操纵性能的基础上, 重点研究 UUV 水平运动和垂直运动性能, 提出了较为完备的 UUV 操纵性能优化数学 操纵性能数据对各个性能指标进行统计分析, 选择模糊数学中对应的隶属度函数进行拟合, 确定相应隶属度函 数参数; 利用禁忌搜索算法对遗传算法的改进而得到的遗传禁忌搜索算法 (GA-TS) , 由并行和分层策略改进遗 传算法得到的并行遗传算法 (PGA) 以及遗传二次载波算法 (LGA) , 将数学模型与这 3 种算法集成, 利用 C++ 语 言编写了 UUV 操纵性能优化软件。通过对总系统优化得到的遗传禁忌搜索算法寻优能力最强, 利用该算法研 到一组最佳性能的权重分配。 中图分类号: U661.33 究水平面运动和垂直面运动 2 个子系统, 得到各个性能指标权重对系统目标函数影响程度的排序, 同时分别得 关键词: 无人潜器; 操纵性能; 模糊评判方法; 遗传禁忌搜索算法; 综合优化
第9卷 第1期 2014 第 1 期年 2 月
中 国 舰 船 研 究 Chinese Journal of Ship Research
期刊网址:
Vol.9 No.1 Feb. 2014
UUV 操纵性能综合优化模型研究
江苏科技大学 船舶与海洋工程学院, 江苏 镇江 212003
UUV与AUV国内外发展情况
USV与AUV国内外发展情况一、USV国内发展情况1.1上海海事大学“海腾01”上海海事大学日前对外发布最新科研成果,由该校科学研究院航运技术与控制工程交通行业重点实验室无人水面艇课题组开发研制的“‘海腾01’号智能高速无人水面艇”成功落水。
作为国际研究热点,“海腾01”号瞄准世界最先进无人水面艇技术,开发具有全天候、高海况下自主航行,实时进行水面监视监测、水下测量勘探功能,多操控模式、大载荷特点的高速无人水面艇。
“海腾01”号可在海事巡航、航道测量、水文监测、水面防污染监测、进出港与过境船舶监测监视、水上消防、水上溢油控制与回收、海上搜寻救助、沉船勘探打捞、水上反恐、专属经济区守护与活动取证、海洋资源调查与取样等领域无人作业。
该项目获得2010年中央财政支持地方高校发展专项资金支持,并在国内首次实现海上溢油处理水面机器人技术及其装备的试验性应用。
据介绍,“海腾01”号智能高速无人水面艇长10.5米,宽3.6米,满载排水量8.5吨,吃水0.8米。
使用喷水推进,最大航速40节,巡航速度30节。
由艇体、推进系统、能源系统、导航系统、通讯系统、控制系统和任务系统等组成。
具有全自航模式、半自航模式和全遥控模式三种工作模式。
配备有毫米波雷达、激光雷达、前视声纳、立体视觉和360度监控摄像机等监测设备,可进行水上和水下障碍物的全方位探测。
并通过多源信息融合提高障碍物探测的准确性和可靠性,为自主避障提供足够信息。
“海腾01”号既可无人驾驶,也可人工驾驶,驾控台上的人工驾驶具有最高优先级,便于无人艇调试过程中的监控与紧急情况处置。
1.2上海海事大学“Silver frog”上海海事大学研制的“Silver frog”号USV 为双体型铝合金小船,是一个多任务通用平台,艇长2.7m、宽1.48m、型深0.36m,艇重60kg,有效载荷100kg。
采用双螺旋桨推进,由DC 电机驱动,依靠推力差进行转向控制。
航速可达6kn(艇重60kg 时),使用60Ah 的锂电池组供电。
UUV关键技术及发展趋势探讨舒国平朱新星
UUV关键技术及发展趋势探讨舒国平朱新星发布时间:2023-07-18T04:42:35.396Z 来源:《中国科技信息》2023年9期作者:舒国平朱新星[导读] 依据控制方式的不同,UUV可分为无人自主潜航器(AUV)、有缆遥控潜器(ROV)和自主遥控复合型潜器(HROV)等。
其中,AUV能够依靠其自治能力完成任务,具有机动灵活、使用成本低、作业范围大、环境适应能力强等特点;ARV配备与母船连接的缆索,能够以自主、遥控、半自动等多种模式作业。
本文分析了其主要关键技术,并展望了其发展趋势。
中国船舶集团公司第七一○研究所湖北宜昌 443003摘要:依据控制方式的不同,UUV可分为无人自主潜航器(AUV)、有缆遥控潜器(ROV)和自主遥控复合型潜器(HROV)等。
其中,AUV能够依靠其自治能力完成任务,具有机动灵活、使用成本低、作业范围大、环境适应能力强等特点;ARV配备与母船连接的缆索,能够以自主、遥控、半自动等多种模式作业。
本文分析了其主要关键技术,并展望了其发展趋势。
关键词:UUV;关键技术;发展趋势1 研究现状无人潜航器(UUV)研制始于20世纪50年代。
进入21世纪,随着结构材料、智能控制、导航定位、能源推进及传感器等技术的不断发展,无人潜航器的工作深度、自主控制、续航时间及作业能力均大幅提升。
以美欧为代表的海洋科技强国大力发展大深度无人潜航器装备,多型大深度AUV、ARV已实现业务化应用。
美国在大深度无人潜航器领域居世界领先地位,主要研发应用机构包括美国海军水下作战中心、海军研究局、国防部高级研究计划局(DARPA)等军方单位以及伍兹霍尔海洋研究所(WHOI)、华盛顿大学、麻省理工学院、Hydroid公司、Teledyne公司、波音公司和洛克希德·马丁公司等科研院所和企业。
REMUS系列AUV是美国性能最先进、列装最多、应用最广泛的无人潜航器系列,采用模块化设计,能够搭载不同类型任务载荷完成多种使命任务,已大量出口英、日、澳等国。
潜艇原理第八讲-潜艇的操纵性-1(数学模型)
同一个向量在不同坐标系下 的投影之间的代数关系可以 利用欧拉定理来描述。
欧拉定理:绕定点运动的刚体,从某一位置到另一位置的 任何位移,可以绕通过定点的某一轴转动一次而实现。
基于欧拉角的旋转矩阵生成方法
生成旋转矩阵的一种简单方式是把它作为三个基本旋 转的序列复合。关于右手笛卡尔坐标系的 z-, y- 和x-轴的 旋转分别叫做 yaw, pitch 和 roll 旋转。在下面的介绍中, 我们将以速度向量为例,通过上述基本旋转矩阵的操作过 程来得到速度向量 U 在不同坐标系下投影的对应关系。 固定坐标系的三个坐标轴记为 x3 , y3 , z3 ,速度向量 在上述三轴上的投影记为 u3 , v3 , w3 。
u cos cos vcos sin sin sin cos wcos sin cos sin sin u sin cos vsin sin sin cos cos wsin sin cos cos sin u sin v cos sin w cos cos
u2 u1 cos w1 sin v2 v1 w2 u1 sin w1 cos
u2 cos 0 sin u1 v 0 v U 2 R U1 1 0 y , 2 1 w2 sin 0 cos w1
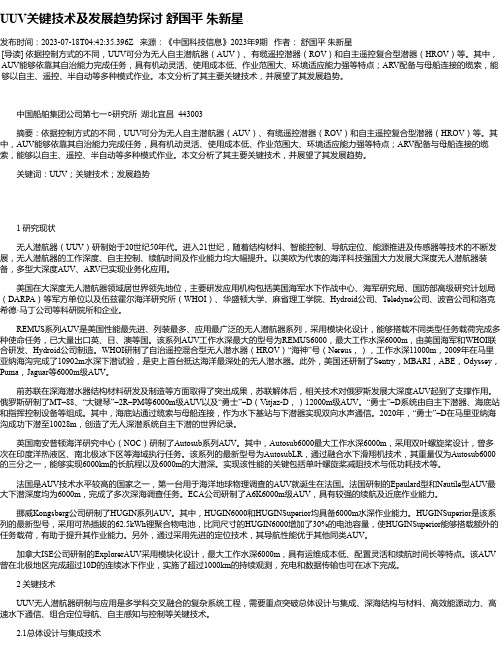
第六章 潜艇的操纵性
§6.1 潜艇操纵性的特点
良 好 的 潜 艇 操 纵 性 潜艇运动 的稳定性
保持一定航行状态 (航向、深度)不 变的性能
潜艇运动 的机动性
改变航行状 态的性能
§6.1 潜艇操纵性的特点
影响潜艇操纵性的因素
基于遗传算法的UUV快速性和能源系统综合优化分析

c o mp r e h e n s i v e o b j e c t i v e f u n c t i o n o n r a p i d i t y a n d e n e r g y s y s t e m o f U UV i s e s t a b l i s h e d;t h e i n t e g r a t e d
O ne i n t e g r a t e d o p t i mi z t i o n me t h o d o n r a p i di t y a nd e n e r g y s y s t e m o f UU V
WA N G Me n g - y u n , Y U Q i a n g , YA N G S o n g — l i n
第3 7卷 第 2期
2 0 1 5年 2月
舰
船
科
学
技
术
Vo 1 . 3 7, No . 2
S HI P SCI ENCE AND T ECH NOLOGY
Fe b.,2 01 5
基 于 遗传 算 法 的 U U V快 速性 和 能 源 系统 综 合 优 化 分 析
王 蒙云 , 俞 强 , 杨 松 林
( 江 苏科技 大 学 船舶 与 海 洋工程 学 院 , 江苏 镇江 2 1 2 0 0 3 )
摘 要 : 水 下无 人航 行器 ( U U V ) 的总体优化设计一般 由快速性 、 操纵性 、 结构强 度 、 能 源系统等 系统构成 , 各
个系统之间耦合 , 综 合 考 虑各 系统 问 的耦 合 作用 对 于 U U V的设计至关重要 , 本 文 针对 U U V 快 速 性 和 能 源 系 统 综 合 优
基于领航者的多UUV协调编队滑模控制

哈 尔 滨 工 程 大 学 学 报 Journal of Harbin Engineeb. 2018
基于领航者的多 UUV 协调编队滑模控制
李娟, 马涛, 刘建华
( 哈尔滨工程大学 自动化学院,黑龙江 哈尔滨 150001)
摘 要:针对多无人水下航行器( unmanned underwater vehicle, UUV) 编队控制易受外界环境扰动的问题,本文提出 一种基于领航者的鲁棒滑模编队控制方法。 该方法采用滤波反步法设计控制器,使领航者跟踪期望路径。 为了使 跟随者能够更好地跟踪上领航者,利用领航者的位置与速度信息进行编队控制器设计,增加系统的鲁棒性的同时, 分别对跟随者的纵向速度误差和横向速度误差进行了积分滑模面的设计。 仿真结果表明:针对外界环境扰动及参 数的不确定性,本文所提出的鲁棒性的滑模编队控制器是切实有效的。 关键词:多无人水下航行器; 领航 - 跟随; 路径跟踪; 二阶滤波器; 滤波误差补偿回路; 滤波反步法; 滑模控制; 编队;协调控制 DOI:10������ 11990 / jheu. 201703102 网络出版地址:http: / / www. cnki. net / kcms / detail / 23������ 1390. u. 20171211. 0914. 020. html 中图分类号:TP273������ 2 文献标志码:A 文章编号:1006⁃7043(2018)02⁃0350⁃08
Abstract:In this study, to address the vulnerability of the multi⁃UUV formation control to disturbances from the ex⁃ ternal environment, a pilot⁃based robust sliding mode formation control method is proposed. In the proposed meth⁃ od, the controller was designed by the filter backstepping method to enable the pilot to track the desired path. The pilot’ s location and velocity information were used in the design of the fleet controller. The follow⁃ups of the longi⁃ tudinal velocity and lateral velocity errors were integrated into the sliding mode surface design to enable the follow⁃ ers to properly track the pilot and robustness, respectively. Finally, the simulation results revealed that the pro⁃ posed robust and effective sliding mode formation controller was effective and feasible for control under disturbances from the external environment and parameter uncertainty. Keywords:unmanned underwater vehicle( UUV) ; leader⁃follower; path following; second order filter; filter error compensation loop; filtering backstepping; sliding mode control; formation; coordination control
一种面向自动驾驶汽车的非线性纵向级联控制策略

关键词:纵向控制 自动驾驶汽车 速度跟踪 横向控制 非线性控制
A Nonlinear Vertical Cascade Control Strategy for Self-driving Automobiles
Gu Mingqin (Chery Auto Co., Ltd.) Xu Jingyang (China Automotive Technology & Researc源自 Center Co., Ltd.)
Abstract: In order to control the self-driving car steadily, this paper proposes a nonlinear longitudinal cascade control strategy and a hybrid lateral control method so that the automatic vehicle can run safely in multicurve state. Firstly, the vehicle model is abstracted as the dynamic model of the bicycle vehicle, the longitudinal control external circulation control strategy is designed, and the stability of the system is analyzed by the Lyapunov method. Then, the dynamic models of the engine and power system are established, and the torque controller for the bottom control of the vehicle is designed to implement the internal circulation control strategy of the vehicle. Finally, hybrid horizontal control and longitudinal control are used to control the vehicle to run on multiple curved roads. They are tested under various camber sections. The experimental results show that under the condition that the speed is not higher than 30km/h, the system can safely travel according to the reference speed to achieve the purpose of controlling the vehicle.
UUV对低速机动目标空间轨迹跟踪控制研究
UUV 对低速机动目标空间轨迹跟踪控制研究
ABSTRACT
Achieving tracking the spatial trajectory of low-speed underwater maneuvering target accurately plays a decisive role in many underwater operations that UUV needs to finish. Preprocessing the noise of UUV’s sensor measurement data, such as denoising and smooth-fitting, can provide more accurate input for the trajectory tracking controller; Designing a controller, which can not only realize trajectory tracking of target accurately for UUV, but also has a strong robustness to the uncertainty of UUV’s system model parameters and external disturbance, is crucial for UUV to complete various tasks in the complex underwater environment. Therefore, several key problems existed in spatial trajectory tracking of low-speed underwater maneuvering target for UUV have been researched in this paper as follows:
UUV在线路径规划技术现状及发展趋势

UUV在线路径规划技术现状及发展趋势UUV在线路径规划技术是UUV研究领域中的一个重要部分。
本文首先综述国内外UUV路径规划的发展现状,然后从使用不同计算方法的角度,分别从传统规划法、智能规划法和几何规划法,综述了UUV实时路径规划技术的研究现状和特点,指出了各种方法的优点和不足。
采用流函数法为UUV在复杂海洋环境下进行实时的航路规划。
最后,展望了UUV路径规划技术的发展趋势。
标签:UUV;路径规划;趋避;传统规划;智能规划0 引言在UUV的研究技术中,在线路径规划技术是完成其导航的一个重要环节。
典型的路径规划问题是指在有障碍物的工作环境中,按照一定的评价标准(行走路线最短、所用时间最少等)为机器人寻找一条从起点到终点的运动路径,让机器人在运动过程中能安全、无碰撞地通过所有的障碍物。
因而路径规划问题又可以称为避碰规划问题。
在线路径规划问题就是UUV的实时路径规划问题,又称局部路径规划。
文中从使用不同计算方法的角度,介绍了机器人路径规划技术的现状、特点及发展趋势。
1传统规划方法1.1 可视图法可视图法把UUV看作一点,将UUV、目标点的各顶点进行组合连接,并保证这些直线均不与障碍物相交,这就形成了一张图称为可视图。
1.2 自由空间法自由空间法通常是按比例扩大障碍物,而把UUV缩小成一点,然后采用预先定义的凸多边形等基本形状构造自由空间来描述UUV及其周围的环境,并将自由空间表示为连通图,然后通过搜索连通图来进行路径规划。
此方法比较灵活,即使起始点和目标点改变,也不必重构连通图,但是算法的复杂程度与障碍物的多少成正比,且不能保证任何情况下都能获得最短路径[2]。
1.3 人工势场法人工势场法的基本思想是将UUV在环境中的运动视为一种虚拟人工受力场中的运动。
障碍物对UUV产生斥力,目标点产生引力,引力和斥力周围由一定的算法产生相应的势,UUV在势场中受到抽象力作用,抽象力使得UUV绕过障碍物。
该法结构简单,便于低层的实时控制,在实时避障和平滑的轨迹控制方面,得到了广泛应用,其不足在于存在局部最优解,容易产生死锁现象。
欠驱动UUV首尾平行操舵控制器设计研究
欠驱动UUV首尾平行操舵控制器设计研究段曰逊;龚时华【摘要】对欠驱动UUV首尾平行操舵模式的控制特性和应用需求进行分析,建立首尾平行操舵控制数学模型.设计首尾平行操舵混合控制器,尾舵通过PID控制器实现深度控制,首舵通过基于模糊PID的前馈-反馈复合控制器实现姿态调整.首舵前馈控制器用于补偿尾舵引起的扰动,模糊PID反馈控制器用于补偿前馈控制偏差和外界扰动.仿真结果表明,设计的混合控制器实现了小攻角爬潜控制,控制器精度高、适应性好,首舵反馈控制采用模糊PID控制器后,具有更高的鲁棒性.【期刊名称】《舰船科学技术》【年(卷),期】2019(041)005【总页数】5页(P65-69)【关键词】UUV;PID控制器;模糊控制器;前馈-反馈控制器【作者】段曰逊;龚时华【作者单位】中国船舶重工集团公司第七〇五研究所昆明分部,云南昆明 650101;中国船舶重工集团公司第七〇五研究所昆明分部,云南昆明 650101【正文语种】中文【中图分类】U674.9410 引言为避免欠驱动UUV在低速状态下可能出现的“反常操舵”(即出现逆速)现象[1],或者为了加强欠驱动UUV纵平面的控制舵效,部分UUV在总体设计上会同时布置尾水平舵和首水平舵。
对于同时配置首、尾水平舵的UUV而言,纵平面控制通常有3种操舵模式,即首尾分时单独操舵、首尾相对操舵和首尾平行操舵。
首尾分时单独操舵模式中,不工作的舵面在零位上可起到稳定鳍的效果,也可以作为纵平面的备份执行机构,提高控制的可靠性。
后2种操舵模式为首尾舵联合控制,控制过程涉及首、尾舵产生的升力与操纵力矩的交叉耦合关系,二者具有截然不同的控制效果。
首尾相对操舵模式中,其有效的控制输入为叠加后的操纵力矩,直接控制目标是UUV俯仰角。
其原理是利用UUV攻角产生的升力与力矩实现纵平面机动控制。
其优点是可获得较大的(即首尾舵叠加的)纵倾控制力矩,纵平面机动性较好,应用较为广泛。
但由于爬潜过程中攻角较大,在某些对UUV纵倾姿态平衡性存在特殊要求的任务中,该模式难以满足需求。
基于专家S面控制的UUV姿态控制系统设计
基于专家S面控制的UUV姿态控制系统设计黄悦华;刘瑞勇;杨培培;李闯;向东旭【摘要】近年来,长航程UUV的应用越来越多,长航程UUV在水下进行长距离航行时,由于不同水域的海水密度不同,使得UUV的受力状况发生变化,从而影响其航行姿态角,使其不能按照预定的路径完成航行任务,甚至发生危险.本文针对姿态变化问题,将专家控制和S面控制相结合,设计一种专家S面控制器,并进行半实物仿真.仿真试验结果表明,该方法可以实现对UUV实时准确的定深定向调节,满足实际使用要求.【期刊名称】《三峡大学学报(自然科学版)》【年(卷),期】2015(037)006【总页数】5页(P80-84)【关键词】UUV;整体构架;专家S面控制;定深定向;半实物仿真【作者】黄悦华;刘瑞勇;杨培培;李闯;向东旭【作者单位】三峡大学电气与新能源学院,湖北宜昌 443002;三峡大学电气与新能源学院,湖北宜昌 443002;三峡大学电气与新能源学院,湖北宜昌 443002;三峡大学电气与新能源学院,湖北宜昌 443002;三峡大学电气与新能源学院,湖北宜昌443002【正文语种】中文【中图分类】TP273UUV恶劣的工作环境决定了其可能会遇到各种可控或不可控的危险,如果UUV没有性能良好的控制系统,极有可能会导致水下机器人失事或失联[1],最终沉入海底或者被他国所窃取.基于此,面对复杂的海域工作环境,如何研究有效且可靠的UUV控制系统,成为装备高质量UUV设备的重要课题.综合控制系统是整个UUV的核心组成部分,其设计的优劣直接影响到整个UUV的性能以及航行的安全性.该课题中UUV的航行分为自主航行和遥控模式两种航行方式,其中自主航行由中央控制单元自主决策控制航行,遥控模式下的航行是通过上位机以无线电或者有揽通信的方式与实验艇通信;自主航行模式下,通过惯导(INS)、深度计、多普勒测速仪(DVL)等传感器获取UUV的运动信息,并根据这些信息做出控制决策,来完成自主航行任务.本课题设计的UUV综合控制系统整体构架如图1所示.此UUV具有如下功能:1)通过操控台可对UUV进行操控,包括对各个模块的电源控制、对UUV进行手操驾驶、预编程操控、定向航行、定深航行控制.2)UUV实时信息可以实时反馈给操控台.包括UUV电池组的测量系统和控制系统的电流、电压、已用电量,实验艇的实时姿态:横滚角、俯仰角、偏航角、航行速度、电机转速、实时位置、深度,离底高度,各个阀门开关状态、各个水舱水量、以及舱内实时图像等.这些数据通过两路信道传输,为保证航行安全,主要考虑无线电通信的顺畅[2].3)对UUV运行状态进行实时监测,包括7个舱的漏水检测、温度检测、氢气浓度检测、火警检测;控制系统、测量系统以推进电机电流和电压监测以及超深、超速、无线电通信等各种报警检测,并具备在运行故障(主要指超深)情况下通过释放压载确保实验艇的安全.4)通过给定推电机的转速或者航速(一般而言,转速和航速对应有一定的关系)可以控制UUV的前进,通过给定水平舵机、垂直舵机和围壳舵机一定角度来控制UUV转向和下潜运动,通过压载水舱注排水及左右浮力水舱调水可以控制艇的横滚、俯仰等艇态和负浮力的设定,以在水面环境不利于水平舵机发挥舵效的时候辅助UUV顺利下潜.5)对UUV位置进行实时监测,并具有导航定位功能.UUV在水面标定时完成GPS的信息的收集,并将该信息给到惯性导航装置,当实验艇下潜到水下时,由惯性导航装置和多普勒计程仪计算出当前的航行位置,当实验艇浮出水面时,通过操控台给定校准指令,将当前实验艇的位置与GPS位置进行校准.实验艇同时利用深度计和多普勒计程仪实时获取UUV在水下的深度和离底高度、航行速度等信息.6)可通过路径规划来实现实验艇的路径跟踪航行.采用智能积分时应该遵循的判断条件是:当>0时,对偏差进行积分;当<0时,不对误差进行积分.此条件为是否引入智能积分的基本判断条件.除此之外,还应该考虑边界条件[3],即偏差及偏差变化率出现的极值点的情况,综合上述3种情况组合,可以将是否引入智能积分的条件总结如下:1)当>0且e≠0时,对偏差进行积分控制;2)当或e=0时,不对偏差积分.这样的积分作用即为智能积分.引入智能积分,能够在模糊控制的基础上提高控制系统的稳态状态和精度.有智能积分的条件可以得到智能积分的S面控制模型[4],如下描述:由S面控制模型可知,控制参数为k1、k2和ki,相比模糊控制,S面控制需要调整的变量简单得多.改变k1、k2和ki的值就能实现偏差和偏差变化率在控制输出中的比重的调整,达到对超调量和收敛速度的控制效果的优化[5],同时控制系统的稳态误差,以满足智能作业的要求.在S面控制系统中,一般采用人工调整或者自适应调整这两种参数调整方式.所谓人工调整,指的是通过对k1、k2和ki大小的调节,实现水下机器人在一般情况下的运动控制精度.所谓自适应调整,指的是需对k1、k2两个参数进行智能的在线调整,实现系统实时的动态性能和稳态性能.应该注意的是,在参数调整的过程中,由于是全局范围内的参数调整,导致自适应调整和人工调整都不能达到控制参数的最佳匹配.但是,S面控制方法主要关注控制过程的全局性,注重控制过程稳定、超调小、平滑、收敛速度快等控制效果.通过对S面控制器参数的修改,能够比较方便地完成控制器全局过程的控制.在自适应调整中,参数k1、k2对S面控制器的控制作用有重要影响,即这两个参数的变化会对S面控制器的输出产生大的干扰,导致控制系统的动态性能和稳态性能的变化,对于水下机器人而言,固定k1、k2的值不能达到较好的控制效果[6].通过本章前面的阐述,可以建立一个完整的智能控制理论模型—专家S面控制器,其控制模型如图2所示.专家S面控制器是以间接专家控制系统为基础,运用人的知识和经验[7],并按照专家在求解控制问题时的启发式思维模式和控制规则构造而成的控制策略.专家S面控制器通过对参数k1、k2和ki的在线调整,使得系统动态性能和稳态性能达到要求.专家S面控制器作为一个二级实时智能协调控制器,由两部分组成:专家智能协调级、基本控制级.由S面控制和专家控制组成控制级,S面控制器为控制系统的基本控制级,控制级与被控对象组成实时闭环控制系统.专家智能协调级由数据库、知识库和智能协调器组成,数据库主要用来存放误差变化率和误差的阈值以及参数k1、k2的在线调整范围;知识库主要为常规的产生式规则的集合;智能协调器为推理机.专家智能协调级主要实现在线监测控制系统,实时监测系统性能[8].根据系统的数据信息,通过推理机完成对S面控制器参数的在线调整,实现对控制对象的有效控制.在本文的研究对象中,存在规则库少、推理搜索空间有限的缺点,因此本文采用有条件推理结论的正向推理机制[9],通过对控制规则的逐条匹配,实现控制规则集的完善和在线智能.由S面的数学控制模型可知,在S面控制系统中,控制参数k1、k2分别对偏差和偏差变化率有很大的影响效果,下面对系统响应的影响进行具体分析:控制参数k1影响偏差e在系统中的控制作用.k1的变化将引起误差的控制效果,如果k1取值增大,误差的控制效果相应增强,导致系统控制所要上升时间变短,由于控制的惯性作用,产生较大的超调量,收敛速度变慢,如果k1选取过大,系统可能产生较大幅度的震荡现象,所以k1的值不能过大.如果减小参数k1的值,削弱误差的控制作用,这样可以减小超调量,同时避免震荡的产生,但如果k1的值过小,导致误差的控制作用不够,将使得上升速度变缓,收敛时间增长,稳定状态下的误差变大,同样不能达到控制效果.控制参数k2影响偏差变化率在系统中的控制作用.k2的变化将会引起误差变化率的控制效果,如果k2取值增大,误差变化率的控制效果相应增强,S面控制系统的灵敏度得到提升,能够抑制超调的发生.如果k2的值选取过大,将使S面控制器对出现的细微变化过于敏感,超前使用了误差变化率的控制作用,使系统的响应时间变长.如果k2的值过小,S面控制系统的灵敏度被大幅削弱,将不能对超调产生较好的控制效果.通过分析,控制参数k1、k2的选取将对控制器的控制效果造成不同的影响,在系统的不同控制阶段,参数k1、k2的值都将对控制器的控制效果产生不同的影响.通过对S面控制系统经验的总结,得到了如下所示的控制参数在线调整算法,这样的一组产生式的控制规则用来实现本文控制策略中的k1、k2和ki选取:R1 IF (e>0 and<0 and e>δ)THEN(K1=Δk1,K2=0)R3 IF (e<0 and<0) THEN(K1=-Δk1,K2=Δk2)R5 IF (e>0 and>0) THEN(K1=Δk1,K2=0)R6 IF>0 or=0且e≠0) THEN(ki=ki)R7 IF<0 and=0) THEN(ki=0)上述规则中,e和为系统中的偏差和偏差的变化率,Δk1、Δk2表示k1和k2的极小增量,其值可按照实际控制情况选取,K1和K2表示k1和k2的动态修正因子.如果k1(t)、k2(t)、k1(t-1)、k2(t-1)为上一时刻和当前时刻的参数,那么他们具有如式(1)所示的调整规则.本文中,k1(0)、k2(0)和ki的初始值主要按照控制系统的特性和控制经验选取.UUV定深定向控制系统半实物仿真试验,要求能为UUV定深定向控制系统提供真实的工作环境,模拟不同的工作条件,并能模拟各种极端条件下的工作情况,以检验系统的控制器的各种功能和可靠性,分析系统、设备的临界工作条件.UUV定深定向控制系统半实物仿真试验具体应实现如下功能:1)仿真机建立UUV的模型,包括6个自由度的受力模型以及动力系统、浮力、均衡模型,并对UUV的6自由度非线性模型进行仿真解算.2)采用半实物模拟机构,即三轴转台,直观地体现给定艉水平舵、艉垂直舵、围壳舵舵角时,三轴转台的运动状态,分析反馈数据的正确性.在UUV预编程航行及自主航行时候,观察定深定向航行过程中三轴转台的变化过程,分析其合理性.3)通过海流模拟器模拟不同的海况,浪涌、温度、盐度、深度等数据,分析在不同的海况下算法的适应性.4)通过中央控制单元输入的UUV定深航行的深度,模拟定深航行过程,分析到达预定深度的仿真波形图;通过中央控制单元输入UUV的航向,模拟定向航行过程,分析到达预定航向的仿真波形图.UUV定深定向控制系统半实物仿真试验原理图如图3所示,为了UUV定深定向控制系统的功能,在进行UUV定深定向控制系统半实物仿真系统设计时,必须包括以下设备:1)DSPACE实时仿真系统:主要功能是仿真被控对象和环境;2)Matlab仿真工作站:主要功能是建立UUV定深定向控制系统的数学模型;3)Fluent仿真工作站:主要完成UUV结构特性分析、流体动力性能分析;4)GPS 及深度信号给定机构:自主航行和预编程航行时,需要最初的GPS位置信号才能开始航行,深度给定信号后才能进行定深航行,为提供UUV的航行深度控制;5)中央控制单元:本课题使用的中央控制单元是由盛博协同设计制作,主要是基于PC104主板设计的.主要的定深定向算法均在中央控制单元中执行.在进行定深定向控制时,根据Matlab仿真工作站反馈的深度信息进行定深控制,同时根据三轴转台给定的航向角进行航向控制,根据三轴转台给定的横滚角和俯仰角进行航行过程中的姿态控制;6)本文所研究的控制对象比较特殊,不同于一般UUV,在下潜过程中先进行注水动作使得实验艇处于零浮力的状态,然后电机启动,艉水平舵、围壳舵、艉垂直舵开始打舵.因此在Matlab仿真工作站的仿真模型应建立均衡系统模拟完成注排水过程.基于均衡系统设计需要准确的主排水流量信息,故在本文中使用的模型没有采用均衡系统.在下潜准备过程中直接将潜深初值设置为-2 m.浮力状态设置为小负浮力状态下开始仿真.如图4所示为定深定向的Matlab工作站半实物仿真模型,主要由3部分组成,控制算法、深度控制模型、航向控制模型.定深算法中,对俯仰角的控制具有重大意义,它除了能更好地控制航行器下潜姿态以外,还是衡量控制算法的一个重要指标.为了保证航行器定深控制的性能,俯仰角在定深控制过程中至关重要.在实际航行过程中,由于海流等各种干扰因素的存在,控制定深常态状态下会存在一定的偏差,UUV在航行时就会通过不停的打舵来校正俯仰角,保持航行的姿态,一般情况下,UUV的俯仰角不应该超过正负10°的范围,对于本文的研究对象而言,由于其体积重量庞大,艇体长的特点,一般控制实验艇的俯仰角在正负5°的范围以内,否则就要进行水下均衡调整艇的状态,甚至进行应急处理以保证实验的安全.定深控制主要是航行器从水面下潜到某一深度和航行器在某一深度航行时受到各种扰动而加以纠正控制.深度的变化必将伴随着俯仰角的的变化,俯仰角如果变化过于剧烈,深度控制将产生较大的超调量,如果俯仰角变化过于缓慢,将导致深度变化也很缓慢,调节时间长.该控制算法是基于专家S面控制算法研究而设计的,控制算法考虑了UUV的垂向速度以及俯仰角速度,由于UUV的排量大,机动能力较小型UUV差,因此通过UUV的艉水平舵和艏水平舵来实现的.1)定深20 m,即深度从0 m变深到20 m的过程,航向角定向10°,且从0°变到10°,如图5所示.如图5(a)所示,此次定深定向航行过程中第240 s时航行深度第一次达到20 m,之后60 s发生了超调,超调量0.8 m左右,第400 s时航行深度收敛于20 m的设定深度值,具有较好的深度控制效果;在定深定向航行的过程中,由图5(b)可以看出,实验艇在0~100的范围内产生了一个大的埋首,根据智能控制的理念,俯仰角提前产生归零趋势,在200 s时俯仰角为0°,此时系统检测深度未到20 m,再次产生埋首的效果,直到第400 s系统深度到达20 m,实验艇开始抬首,此时抬首,产生了一定的超调量.此定向航行中航向角的基本趋势、控制趋势与定深航行相同.图5(d)中也对定深航行过程中(0~400 s的时间内)的垂向速度进行了分析,可以看出,在340 s左右的时间上,垂向速度由正值向负值过渡,以抵消超调.2)定深12.5 m,即深度从0 m变深到12.5 m,航向角5°方向,且从0°到5°,如图6所示.如图6(a)所示,此次定深定向航行过程中第170 s时航行深度第一次达到12.50 m,之后50 s发生了超调,超调量0.6 m,第340 s时航行深度收敛于12.5 m的设定深度值,具有较好的深度控制效果;在定深定向航行的过程中,由图6(c)可以看出,实验艇在0~200的范围内产生了一个大的埋首,根据智能控制的理念,俯仰角提前产生归零趋势,在1 200 s时俯仰角为0°,12.5 m定深航行的效果与20 m定深航行的不同,俯仰角曲线在很长时间范围内均存在波动,其原因是小深度控制存在近水面干扰.本文将专家控制与S面控制相结合,设计了一种专家S面控制器,对专家S面控制算法进行半实物仿真分析,分别在定深20 m和定深12.5 m,定向10°时对定深效果和定向效果进行分析,得出了较好的结论;进行了水下变深的半实物仿真实验,实验结果表明,变深过程中姿态基本稳定,能够满足实际使用要求.。
UUV与AUV国内外发展情况
USV与AUV国内外发展情况一、USV国内发展情况1.1上海海事大学“海腾01”上海海事大学日前对外发布最新科研成果,由该校科学研究院航运技术与控制工程交通行业重点实验室无人水面艇课题组开发研制的“‘海腾01’号智能高速无人水面艇”成功落水。
作为国际研究热点,“海腾01”号瞄准世界最先进无人水面艇技术,开发具有全天候、高海况下自主航行,实时进行水面监视监测、水下测量勘探功能,多操控模式、大载荷特点的高速无人水面艇。
“海腾01”号可在海事巡航、航道测量、水文监测、水面防污染监测、进出港与过境船舶监测监视、水上消防、水上溢油控制与回收、海上搜寻救助、沉船勘探打捞、水上反恐、专属经济区守护与活动取证、海洋资源调查与取样等领域无人作业。
该项目获得2010年中央财政支持地方高校发展专项资金支持,并在国内首次实现海上溢油处理水面机器人技术及其装备的试验性应用。
据介绍,“海腾01”号智能高速无人水面艇长10.5米,宽3.6米,满载排水量8.5吨,吃水0.8米。
使用喷水推进,最大航速40节,巡航速度30节。
由艇体、推进系统、能源系统、导航系统、通讯系统、控制系统和任务系统等组成。
具有全自航模式、半自航模式和全遥控模式三种工作模式。
配备有毫米波雷达、激光雷达、前视声纳、立体视觉和360度监控摄像机等监测设备,可进行水上和水下障碍物的全方位探测。
并通过多源信息融合提高障碍物探测的准确性和可靠性,为自主避障提供足够信息。
“海腾01”号既可无人驾驶,也可人工驾驶,驾控台上的人工驾驶具有最高优先级,便于无人艇调试过程中的监控与紧急情况处置。
1.2上海海事大学“Silver frog”上海海事大学研制的“Silver frog”号USV 为双体型铝合金小船,是一个多任务通用平台,艇长2.7m、宽1.48m、型深0.36m,艇重60kg,有效载荷100kg。
采用双螺旋桨推进,由DC 电机驱动,依靠推力差进行转向控制。
航速可达6kn(艇重60kg 时),使用60Ah 的锂电池组供电。
军用UUV的发展与应用前景展望
UUV发展现状及其使命任务的情况 下, 结合 潜艇武器系统的特点 就军用 UUV 的组成、布放 与回收、作战 的论述。最后指出, 从长 期发展 的角 度看, UUV 作为信 息网 络的节 点, 必 然是信
息网络系统中的关键 设备以及水下系统的关键探测和攻击装备。
6
鱼雷技术
日本在水下航行器领域居于世界先进水平。 执行水下打捞和救助任务是水下航行器发展
初期的典型使命, 一般采取有缆方式。在水下航 行器的发展进程中, UUV 多次成功执行过水下打 捞和救助任务。
UUV 的隐蔽性使它 更能够适应于 水下侦察 和警戒任务, 在敏感海区、争议海区或可能的未来 海战场, 由于种种原因, 常规海上军事力量无法收 集信息和侦察目标; 或者在潜艇无法活动的浅水 区域, 需要一些秘密装备或者无人系统能够渗透 到上述 地区进行 搜集情报、监视 和侦察。显然, UUV 是执行上述任务 的最好载体。在危险度很 高, 环境状况随时变化的浅海, UUV 可以长时间、 自主地进行隐秘性工作, 收集水中和水面上的情 报。美国、日本、加拿大、俄罗斯、法国、英国、德国 等国都研制了执行水下搜索和侦察的 UUV[ 3] 。
为了保护本国领海, 不少国家都在研究和铺 设水下通信网络, 作为未来海战侦察、通信和中继 网络。而 UUV 既可以通过该水下通信网络与水 面进行双向通信, 也可以作为该水下通信网络的 通信中继装置。使用多条 UUV 可以在水下组成 一个具有作战、侦察、通信、警戒等功能的局部网 络系统, 在海战中将发挥极大的作用 [ 5] 。
然而uuv的作用决不仅限于此由于它目标小续航时间长使用方式更灵活功能更强外形和布放形式更多样化而且多数情况下可以反复使用在搜索侦察远程攻击潜艇防御自主作战以及水下网络作战等方面都可担负更重要的任务或提高现有设备的作战性能1搜索和侦察搜索和侦察功能主要是指收集和传送多种形式的数据在敏感区域或潜艇难以到达的区域uuv自主完成水下搜索任务它可作为一个艇外传感器或独立武器平台在不增加母舰危险的前提下扩大探测范围
UUV自航发射方法探究

UUV自航发射方法探究UUV(无人水下航行器)是一种具有高度自主化能力的水下机器人,可以在水下进行各种任务,例如海底勘探、搜救、环境监测等。
UUV具有高度自主化能力,可以既不需要人工控制,也不需要接收地面信号进行指示,可以根据预设的任务模式和自主感知环境条件来自主航行、控制方向和深度、执行任务及返回起点。
由于UUV的应用领域广泛,因此其自航发射方法的研究也变得越来越重要。
UUV的自航发射是指UUV可以自主从水面起点出发,并自主航行到指定目标位置进行任务并返回起点。
UUV的自航发射方法有多种不同的方式,例如通过人工控制、远程遥控、无线通讯、自主感知等不同方式来实现。
其中,常用的方法有自主导航、惯性导航、地形匹配导航等等。
自主导航是一种常见的UUV自航发射方法,通过利用UUV 自主感知环境信息来自主进行导航和控制。
在自主导航中,UUV可以利用各种传感器来获取周围环境信息,例如水温、水流、深度、水下地形等等。
这些环境信息可以被存储在UUV的控制设备中,并在UUV航行过程中进行实时处理和分析。
在自主导航中,UUV可以通过控制舵、推进器等来自主控制航向和速度。
惯性导航是另一种常见的UUV自航发射方法,通过使用惯性测量单元(IMU)来确定UUV的姿态、加速度、角速度等重要参数,然后根据这些参数计算出UUV的位置和速度。
这种方法适用于在水面上起点出发的UUV,并向指定的目标位置自主航行。
惯性导航可以大大提高UUV在水下环境中的导航精度和可靠性,并能够在无GPS和无通讯信号的情况下进行自主航行。
地形匹配导航是一种利用地形数据进行导航的方法,通过地形特征匹配来确定UUV的位置和速度。
这种方法适用于需要沿着水下地形特征线前进的UUV。
在地形匹配导航中,UUV可以使用高精度测深设备来获取水下地形数据,并将这些数据与地图数据进行匹配,得到UUV的位置和速度。
总之,UUV的自航发射方法是UUV自主化运行的重要组成部分。
通过自主感知、自主控制和自主导航等方式,UUV可以自主进行航行和任务执行。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
I
1 + 2 75一 Ⅷ, 4 =一 A2 n =K I 1
{ 1
。 : V a= A6 K ; 2 + 6 6 )
.
() 4
ቤተ መጻሕፍቲ ባይዱ
(+ , =TAG iOK m A ) - s + n
2
I3( f— r 2 一 G A6 r =m GK a 3 2 a= 『 + 2 4 , 1 { 2 2
远程低速 U V纵 向操 纵性研究 U
丁 宝 俊
( 军 驻 太 原地 区 军 事 代 表 室 , 西 太 原 海 山 002 ) 3 0 7
【 摘 要 】 对 远程 低 速 无 人 水 下航 行 器 ( U 的 纵 向 操 纵 性 进 行 研 究 , 建 立 U V纵 向 扰 动 方程 , 供 U V的 纵 向 U V) 可 U 提 u
操 纵 性 研究 中应用 广 泛 的K T 析来 研 究U V的操 纵 —分 U
U V浮心 在 纵平 面 内 的平移 运 动 和 绕 轴 转 动 的 U
性 。K T — 分析 是 基 于扰 动 方程 进行 研 究 的 ,下 面 就 以
U V的纵 向运 动 为例 来说 明 。 U
21 纵 向 运 动 的 扰 动 方 程 .
有 重 要 的 意 义
X。= Y C S -)sn O O I iO
x
y
y ~ iO vcs 。 s + o0 n
2 2 2
・
() 2
V = +
O =一 rtn V t aca ( / y v )
2 操 纵 性 的 K T 分 析 —
在传 统 的U V 纵性 研 究 中 ,静 态 的数值 指 标较 U 操 多 , 如 静稳 定裕 度 、 例 回转 半 径等 。这 里将 运用 在 船舶
在 分 析U V的操纵 性 时 ,常运 用U V的平 面运 动 U U
动模 型 , 经整 理 并 略 去各 个 参 数 前 的 , 略 去二 阶 『 并 △” 小 量 , 理可 得U V的纵 向扰 动方 程 为 : 整 U
方程 , 面建立 U V的纵 向运动 方程 。 下 U
11 坐标 系与航 行 器运 动参数 的选择 .
其 中各个 系 数表 达式 为 :
( 3 )
速 度 、 态角 、 姿 角速 度6 、 角O、 0攻 t舵角 , 参数 。 各
1 . 动 力 学 方 程 2
『 0 = m GA6 0 =r— r l x+ 2 2 l mK 3
f 2 .
运 用动 量 和动 量矩定 理 , 在航 行 器体 坐标 系下 , 可 以建立 航行 器纵 向运动 的动 力学 方程 如 下 :
第2 4卷 第 6期f 第 1 2期1 总 1
机 械 管 理 开 发
M ECHANI AI M ANAGEM ENT AND DEVEL0PM ENT C
20 0 9年 l 月 2
De . 0 9 C2 0
V 1 4 N . S M N .1) o. o6(U o12 2
本 文 中的坐 标 系 采用 文 献[】 的地 面 坐标 系 、 3中 体
坐标 系和 速度 坐标 系 。运动 学参 数选 择 的位 置 坐标 , 。
l + ̄zl +5=6 { 。Oa 口 - . ) 4 - 。8 n 3 +△ △ △ 2 △
2 △ △ +2 △ 。 △ + 3 + 4& n△ = 68 5
13 运 动 学 方 程 .
& =0 9
一
U V操 纵性 是 指 借 助 操 舵 机 构 改 变 或 保 持 运 动 U 姿态 、 向和航深 的性 能, 航 包括 稳 定性 和 机 动性 两 个 方
面 。随着 船舶 操 纵性 理论 的逐 渐成 熟 和 完 善 , U 的 U V 操 纵 性 研 究 也 引 起 了 广 泛 的 关 注 , 而 对 远 程 低 速 U V,对稳 定性 的要求 要 高于对 机 动性 能 的要求 。 比 U 如 , 于军 事 目的 的远程 低 速 U V能否 在水 中稳 定航 用 U 行 , 否具 有 良好 的抗 干扰 性 , 近 水 面航行 的 远程 低 是 在 速 U V受 到波 浪作 用后 还 能否 稳定 航行 , 否 通过 导 U 能 航正确 的导 向 目的地 . 这些 都需 要远 程低 速 U V具 有 U 良好 的稳 定性 。 因此对 远程 低速 U V操 纵性 的研究 具 U
1 纵 向运 动 方 程
假 定 U V扰 动 引 起 的 各 个 运 动 参 量 变 化 为 : , U △
△ A , 8 ,在 小 攻 角 的情 况 下 = TO ̄ , Oa z V C ¥ 一V & = p
= 一
Vsn ̄ 一 0& 一 ic 7, = f
代 入 ( )2 式 所示 的纵 向运 1()
合 成运 动称 为U V的纵 向运 动 。本 文主要 针 对远 程低 U
速U V的纵 向操 纵性 进 行 的研究 。在建 立U V 向扰 U U 纵 动方 程 和提 出纵 向K T 析指 数 的基 础 上 ,运 用 所 建 —分 立 的K T 析指 数分 析 了A、 两型U V的操 纵性 能l] —分 B U 1。 _ 2
K T分析 指 数 . 用 这 些 指 数 可 分 析A、 型 U — 运 B两 UV的 操 纵 性 能 。
【 键 词 】 操 纵 ; 向运 动 ; — 分析 关 纵 KT 【 图分 类 号 】 E 2 【 献 标 识 码 】 A 【 章 编 号 】 10 — 7 X(0 9 0 — 0 9 0 中 95 文 文 0 3 7 3 20 )6 0 2 — 3 0 引 言
a 5 K Vr a 6 & 2=一 2= . 1
(+ 2 m A ) ( G 2&+m x = _G 0 2 鼠+ + z V A % — cs △