改进的单调速率调度算法
单调速率调度算法的可调度性分析与仿真
第2卷 第3 3 期
文 章编号 : 0 94 ( 06 0 0 7 — 3 1 6— 38 20 )3— 0 8 0 0
计
算
机
仿
真
26 月 0 , 年3 0
单调 速 率 调 度 算 法 的 可 调 度 性 分 析 与仿 真
刘 忠仕 , 戴金 海 , 先 洲 桂
T etomeh d rvd sf ud n efrte sh d l i t n yi o ae—mo oo i c e uigag r m. h w to spo ieu eu g ia c o h c e ua lya a ssfrrt l b i l n tncs h d n oi l l h t
中国 分 类 号 - P9 . T 3 19 文 献标 识 码 : A
S h d l b l y An lss a d S m u a in f r Ra e.M o o o i c e u a i t ay i n i l to o t - i n t nc S h d l g Al o i m c e u i g rt n h
KEYW ORDS: t Rae—mo oo i c e u i g a g rt m; c e u a i t ; l — t ra Re —t p r t g s s m ; n tn c s h d l l o h n i S h d lb l y Mu t h e d; a i i l i o eai yt me n e
Smu ain il t 0
1 引盲
单调速率调度 ( ae o o ncSh dl g R )算法 R t —M n t i c eui , MS o n 是一种非常经典 和优秀 的周 期任务调度 算法 , 它是 c L Lu . . i 和 JW. al d在 17 . L ya n 93年提 出的 J MS算法是一种最 优 。R
rtos 速率单调调度算法

RTOS速率单调调度算法1. 什么是RTOS?RTOS(Real-Time Operating System)是一种实时操作系统,用于管理实时任务和资源,以确保系统能够满足实时性要求。
RTOS通常用于嵌入式系统,例如汽车、航空航天和医疗设备等领域。
RTOS的核心功能包括任务管理、调度、中断处理、内存管理和通信等。
其中,调度算法是RTOS中的重要组成部分,它决定了系统中各个任务的执行顺序和时间分配。
2. 什么是速率单调调度算法?速率单调调度算法(Rate Monotonic Scheduling Algorithm)是一种静态优先级调度算法,用于确定实时任务的执行顺序。
该算法基于任务的周期,将优先级分配给任务,优先级越高的任务具有更短的周期。
速率单调调度算法的核心思想是,周期更短的任务具有更高的优先级,因为它们需要更频繁地执行。
通过为任务分配优先级,可以确保系统中的实时任务按照其周期的递减顺序进行调度,从而满足实时性要求。
3. 速率单调调度算法的原理速率单调调度算法的原理可以概括为以下几个步骤:•根据实时任务的周期,为每个任务分配优先级。
周期越短的任务,优先级越高。
•当多个任务具有相同的周期时,可以根据任务的执行时间来确定优先级。
执行时间越短的任务,优先级越高。
•根据任务的优先级,将任务按照优先级递减的顺序进行排序。
•在每个周期开始时,按照排序后的顺序依次执行任务。
如果任务未完成,则等待下一个周期执行。
速率单调调度算法的核心思想是根据任务的周期和执行时间来确定优先级,从而实现任务的有序执行。
该算法的优点是简单高效,适用于周期性任务的调度。
4. 速率单调调度算法的应用速率单调调度算法广泛应用于实时系统中,特别是对于周期性任务的调度。
以下是一些典型的应用场景:•汽车控制系统:例如发动机控制、刹车系统和稳定性控制等任务需要按照严格的时间要求执行。
•航空航天系统:例如飞行控制、导航系统和通信系统等需要快速响应和准确执行的任务。
2019年中国科学院大学862计算机学科综合考研大纲与参考书目

2019年中国科学院大学862计算机学科综合(非专业)考研初试大纲《计算机学科综合(非专业)》考试大纲本《计算机学科综合(非专业)》考试大纲适用于中国科学院大学非计算机科学与技术一级学科下各专业的硕士研究生入学考试。
《计算机学科综合(非专业)》主要内容包括数据结构、操作系统和计算机网络三大部分。
要求考生对计算机科学与技术及相关学科的基本概念有较深入、系统的理解;掌握各种数据结构的定义和实现算法;掌握操作系统和计算机网络所涉及的关键内容,并具有综合运用所学知识分析问题和解决问题的能力。
一、考试内容数据结构1、绪论(1)数据结构的基本概念,数据的逻辑结构、存储结构。
(2)算法的定义、算法的基本特性以及算法分析的基本概念。
2、线性表(1)线性关系、线性表的定义,线性表的基本操作。
(2)线性表的顺序存储结构与链式存储结构(包括单链表、循环链表和双向链表)的构造原理。
在以上两种存储结构上对线性表实施的最主要的操作(包括三种链表的建立、插入和删除、检索等)的算法设计。
3、堆栈与队列(1)堆栈与队列的基本概念、基本操作。
(2)堆栈与队列的顺序存储结构与链式存储结构的构造原理。
(3)在不同存储结构的基础上对堆栈与队列实施插入与删除等基本操作对应的算法设计。
4、串(1)串的基本概念、串的基本操作和存储结构。
(2)串的模式匹配算法和改进的KMP算法5、数组和广义表(1)数组的概念,以及表示和实现(2)矩阵(对称矩阵和稀疏矩阵)的压缩存储(3)广义表的基本概念6、树与二叉树(1)树的定义和性质(2)二叉树的概念、性质和实现(3)遍历二叉树和线索二叉树(4)树和森林(5)赫夫曼树及其应用(6)回溯法与树的遍历(7)树的计数7、图(1)图的定义,基本概念,图的分类,常用名词术语。
(2)图的邻接矩阵存储方法、邻接表存储方法的构造原理。
(3)图的遍历操作。
(4)图的连通性、最小生成树(5)最短路径的计算(6)AOV网与拓扑排序。
RMS调度算法

设某系统的任务集
系统,有强实时和 弱 实 时 之 分。 实 时 系 统 行 为 的 正 确 性不但依赖于计算 结 果 的 正 确 性,还 依 赖 于 产 生 结 果 的时间。解决实时性的关键是任务的合理调度。
实时系统 的 任 务 一 般 分 为 周 期 性 和 非 周 期 性 两 类,其中,周期任务是 系 统 要 处 理 的 主 要 任 务,占 用 处 理机的时间较多;而 非 周 期 任 务 则 是 系 统 为 了 处 理 一 些意外情况或紧急事件所需执行的任务[3]。任务调度 强调的是时间的约 束,通 常 可 采 用 静 态 调 度 算 法 和 动 态调度算法。动态调度算法虽然在某些性能上优于静 态调度算法,但静态调度算法占用处理机的开销小,稳 定性和可预测性好,时间行为的分析也比较容易,因而 实现方便。静态调度 的 本 质 是:事 先 为 每 个 任 务 规 定 一个优先级,该任务 作 业 流 中 的 每 一 项 作 业 都 具 有 相 同的优先级,然后 依 照 优 先 级 大 小 调 度 任 务。 常 用 的 静态调度算法有 FIFO(先 进 先出)、RMS(速 率单 调 算 法)、DM(S 时限单调算法)。现已证明,RMS 是最优的 静态调度算法[5]。本 文 主 要 讨 论 进 行 部 分 改 进 后 的 RMS 算法及其在弱实时系统中的应用。
功后,建立 END to END 通信链路。上下位采用字节方 式进行透明通信,响应速度得到提高,采用软握手解决 呼叫和通信链路的检测。通过上下位机各自的限时通 信机制有效避免通信总线死锁问题。适用于数据流量 较小而且信息固定的场合。 参考文献
1 王志平,熊光泽 . 实时调度算法研究 . 电子科技大学学报,2002 2 Nissanke N. Realtime systems. New Jersey:Prentice Hall,1997 3 刘怀,胡继峰 . 实时系统的多任务调度[J]. 计算机工程,200(2 3) 4 Hsuch C. Lin K J,Fan N. Distributed pinwheel scheduling with end-toend
生产调度问题及其优化算法
生产调度问题及其优化算法背景及摘要这是一个典型的Job-Shop动态排序问题。
目前调度问题的理论研究成果主要集中在以Job-Shop问题为代表的基于最小化完工时间的调度问题上。
一个复杂的制造系统不仅可能涉及到成千上万道车间调度工序,而且工序的变更又可能导致相当大的调度规模。
解空间容量巨大,N个工件、M台机器的问题包含M(N)!种排列。
由于问题的连环嵌套性,使得用图解方法也变得不切实际。
传统的运筹学方法,即便在单目标优化的静态调度问题中也难以有效应用。
本文给出三个模型。
首先通过贪婪法手工求得本问题最优解,既而通过编解码程序随机模拟优化方案得出最优解。
最后采用现代进化算法中有代表性发展优势的遗传算法。
文章有针对性地选取遗传算法关键环节的适宜方法,采用MATLAB 软件实现算法模拟,得出优化方案,并与计算机随机模拟结果加以比较显示出遗传算法之优化效果。
对车间调度系列问题的有效解决具有一定参考和借鉴价值。
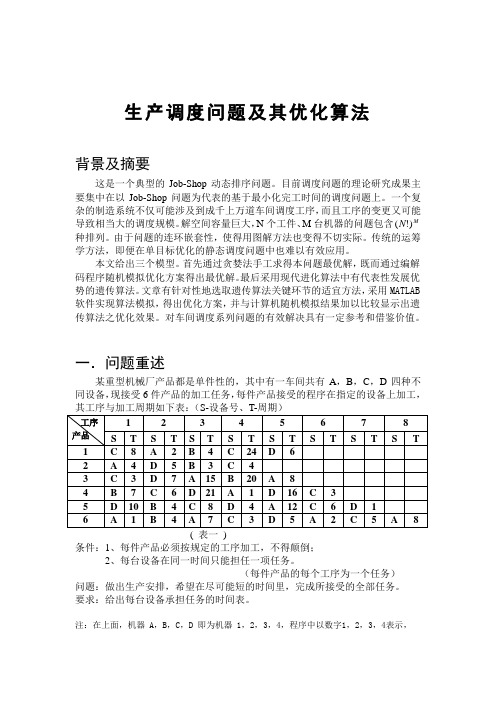
一.问题重述某重型机械厂产品都是单件性的,其中有一车间共有A,B,C,D四种不同设备,现接受6件产品的加工任务,每件产品接受的程序在指定的设备上加工,条件:1、每件产品必须按规定的工序加工,不得颠倒;2、每台设备在同一时间只能担任一项任务。
(每件产品的每个工序为一个任务)问题:做出生产安排,希望在尽可能短的时间里,完成所接受的全部任务。
要求:给出每台设备承担任务的时间表。
注:在上面,机器 A,B,C,D 即为机器 1,2,3,4,程序中以数字1,2,3,4表示,说明时则用A ,B ,C ,D二.模型假设1.每一时刻,每台机器只能加工一个工件,且每个工件只能被一台机器所加工 ,同时加工过程为不间断;2.所有机器均同时开工,且工件从机器I 到机器J 的转移过程时间损耗不计; 3.各工件必须按工艺路线以指定的次序在机器上加工多次; 4.操作允许等待,即前一操作未完成,则后面的操作需要等待,可用资源有限。
三.符号说明及初始数据表达分析i J - 第i 个工件 (i=1…6)M J - 机器顺序阵 )(j i J M,表示i 工件的第 j 个操作的机器号j M - 第j 台机器 (j=1…4)JM- 工件排列阵 ),(j i M J 表i 机器上第j 次加工的工件号T - 加工时间阵 ),(j i T 为i 工件的第 j 个操作的时间周期 C - 整个任务完成时间整理数据后得到:M J =[ C A B C D 0 0 0 ] T = [ 8 2 4 24 6 0 0 0 ][ A D B C 0 0 0 0 ] [ 4 5 3 4 0 0 0 0 ] [ C D A B A 0 0 0 ] [ 3 7 15 20 8 0 0 0 ] [ B C D A D C 0 0 ] [ 7 6 21 1 16 3 0 0 ] [ D B C D A C D 0 ] [ 10 4 8 4 12 6 1 0 ] [ A B A C D A C A ] [ 1 4 7 3 5 2 5 8 ] 上述二阵直接从题目得出,而JM则是我们要求的。
基于单调速率的可调度性判定改进算法
3 R 可调度性判定算法改进 M
31 理论依据 . R 调度模型 中每个任务 的优先级是确 定的,任务 间的 M
是为本文研究改进算法定义 的任务的 4个变量 ,在第 3节中 详细介绍 。 本文研究 的调度模型是基于理想情况 的 R 调度模 型 , M 理想 的 R 上述理论 的研究 ,文献 [】 2提出了可调度性判定的
充要条件 ,此条件能确切 判定所有情况下的 R 调度性 ,但 M 算法复杂度较高 ,不能满足任 务集 的实时判定 ,限于篇幅不 详细陈述。
其中 ,c 表示任务 t的执行 时间; 表示任务 t的周期 ;D f ,
表示 任务 的截止时间 ;P 表示任 务 t 的优先级( 数值越 定义 小优先级越大) U 表示任务 t的 C U利 用率( i ) ; P U =C / , 因此整个任务集的 C U利用率为 : P U=∑ ( 巨, w U 。厶, w, )
定理 任何任 务在与 比其 优先级高 的所有任 务同时到达 时 ,达到临界时刻 ,任务在临界时刻到达 时,任务执行将花 费最长的响应 时间。
2 R 调度算法 M
2 R 调度模型 . 1 M 定义 T=i_ … …, 】 ftt t 为一个含有 n个周期任 务的任 务 l,
集 。集 合 中 的任 务 用 =(i , , 巨, , ) 表 示 。 C, , U , ‘, 来
[ ywo d ]ra.me c eue R tMo oo i( M)ts tshd l it s;lc a al Ke r s e1i h d l; ae n tncR ;aks ;c eua lyt tc kv r be t s e bi e o i
D0I 1.9 9jsn10 -4 82 1.20 2 : 03 6 /i .0 03 2 .0 1 .1 .s 2
RMS模块
RMS任务按单调速率优先级分配(RMPA)的调度算法,称为单调速率调度(RMS)。
RMPA是指任务的优先级按任务周期T来分配。
它根据任务的执行周期的长短来决定调度优先级,那些具有小的执行周期的任务具有较高的优先级,周期长的任务优先级低。
RMS(Rate-Monotonic Scheduling)调度算法简介不考虑n=1的情况。
RMS是单处理器下的最优静态调度算法。
1973年Liu和Layland发表的这篇文章的前半部分首次提出了RM调度算法在静态调度中的最优性.它的一个特点是可通过对系统资源利用率的计算来进行任务可调度性分析,算法简单、有效,便于实现。
不仅如此,他们还把系统的利用系数(utilization factor)和系统可调度性联系起来,推导出用RM调度所能达到的最小系统利用率公式. 同时,这篇论文中透露出来的证明思想和方法也被人们所效仿. 下面就让我们来看看这篇文章中关于RM调度算法的重要结论。
任何一个结论都有一个模型假设,让我们先列出这里的假设:(A1) 所有的任务请求都是周期性的,必须在限定的时限内完成;(A2) 任务的作业必须在该任务的下一个作业发生之前完成,这样避免了考虑队列问题;在这里,我们对任务和作业不作特别的区分,因为一个任务请求就是一个作业。
(A3) 任务之间都是独立的,每个任务的请求不依赖于其他任务请求的开始或完成;(A4) 每个任务的运行时间是不变的,这里任务的运行时间是指处理器在无中断情况下用于处理该任务的时间;(A5) 所有的非周期性任务都在特殊的情况下运行,比如系统初始化或系统非正常紧急处理程序。
(A6) 其它一些假设,比如,单处理器,可抢占调度,任务切换的时间忽略不计等等。
RMS算法⑴任务T i (P i,Ci,D i) 模型:周期为P i,计算时间为Ci,时限D i 为周期终点。
任务在周期起点释放,高优先级任务可抢占低优先级任务的执行。
⑵优先级分配方法:静态固定分配。
计算机大学毕业论文-网络控制系统中的信息调度研究

摘要文章首先阐述了网络控制系统中的信息特征和信息调度的概念和意义。
根据网络控制系统的研究方法:调度与控制分开设计和调度与控制协同设计两大方面,介绍了网络控制系统中信息调度的研究现状。
最后探讨了有待解决的问题和发展趋势。
关键词网络控制系统;信息调度;静/动态调度;混合调度;调度与控制协同设计1 引言网络控制系统(Network Control System,NCS)是指传感器、控制器和执行器通过网络形成的闭环反馈控制系统。
目前,大部分关于NCS的研究针对NCS存在的问题和特性建立系统模型、分析系统稳定性、给出控制方法和控制规律,以保证系统具有良好的稳定性和高质量的控制性能。
然而NCS的性能不仅依赖于控制策略及控制规律的设计,而且还受到网络通信和网络资源的限制。
信息调度尽量避免网络中信息的冲突和拥塞现象的发生,从而大大提高了网络控制系统的服务性能。
2 NCS中的信息特征与信息调度概念在NCS中网络传输的信息主要分为两类:实时性信息和非实时性信息[3]。
实时性信息对时间要求非常苛刻,如果在规定时间的上限内某一信息未能起作用,则该信息将被丢弃,启用最新的信息。
而在NCS信息调度策略中主要调度两类数据信息:周期性信息和非周期性信息。
周期性信息是一种实时性信息,一般要求在传输周期时间内必须传送给目标节点,周期性信息也被称为时间触发信息或者同步信息。
非周期性信息是指节点间的请求服务等信息,它们的发生时刻是随机的,非周期性信息也被称为事件触发信息、异步信息或者随机性信息。
此外,在NCS信息调度中不能忽视突发性信息,突发性信息指一些事先无法预知的突发性的或者随机的事件(例如报警信号、异常处理等),这类信息必须在一定时间内给予处理,否则系统可能出现异常甚至瘫痪。
在网络控制系统中,信息调度发生在应用层,即传感器、控制器与执行器之间信息传递的过程中。
当系统网络中某节点发生数据传输碰撞时,信息调度规定节点的优先发送次序、发送时刻和时间间隔,以避免网络冲突。
常用的调度优化算法公式
常用的调度优化算法公式常用的调度优化算法有很多种,每种算法都有其特定的优势和适用的场景。
本文将介绍几种常见的调度优化算法,并对其进行简要的概述和比较。
1. 先来先服务(First-Come, First-Served, FCFS)先来先服务是最简单的调度算法之一,它按照作业到达的顺序进行调度。
即使作业的执行时间不同,也会按照它们到达的顺序进行执行。
这种算法的优点是简单易实现,但缺点是可能导致长作业等待时间过长,而短作业等待时间过短。
2. 最短作业优先(Shortest Job First, SJF)最短作业优先算法会优先调度执行时间最短的作业。
这种算法可以最大程度地减少作业的等待时间,但需要事先知道每个作业的执行时间。
当作业的执行时间难以估计时,这种算法可能会导致长作业等待时间过长。
3. 优先级调度(Priority Scheduling)优先级调度算法会为每个作业指定一个优先级,并按照优先级进行调度。
优先级可以按照作业的重要性、紧急程度或其他因素进行设置。
这种算法可以根据实际需求进行灵活的调度,但需要合理设置优先级,否则可能导致某些作业一直得不到执行。
4. 时间片轮转(Round Robin, RR)时间片轮转算法将每个作业分配一个固定的时间片,作业在这个时间片内执行,然后切换到下一个作业。
如果一个作业在一个时间片内没有完成,它将被放到队列的末尾继续执行。
这种算法可以确保每个作业都有机会执行,但可能导致一些长作业的等待时间过长。
5. 多级反馈队列(Multilevel Feedback Queue, MLFQ)多级反馈队列算法将作业分成多个队列,并为每个队列分配不同的优先级。
作业首先进入最高优先级的队列,如果在一个时间片内没有完成,它将被移到下一个优先级的队列,直到完成或到达最低优先级的队列。
这种算法可以平衡长作业和短作业的执行时间,但需要合理设置队列数量和优先级。
以上是几种常见的调度优化算法,它们各有优缺点,在不同的场景中选择适合的算法可以最大程度地提高系统的性能和效率。
单调速率任务分配算法利用率的界限分析
调度 模 型基础 上 , 细致 刻 画 了任 务 分配算 法 如何 分 配任 务 的行 为 。依 据 Lu和 Lyad定理 , 出 多 i al n 给
处理 器下任务分配算法的最小 R M利用率界的定理 。仿真 结果表 明, 分配算法的利 用率界是 不同特 征任 务 集 选择 不 同分 配算 法进 行任 务 划分 的关键 , 通过 对任 务 集总利 用 率与算 法利 用率界 的 比较 , 判
w r n y e . n d t e a t n h t o h a k lo ain ag r h s a o ae t e t k t rc so s w I e it d i e ml e e a a z d a h c i s t a w t e t s al t o t l l o h s c o l im l t h a o p o e s r e e d pc e d t c s n b e n te mo e f re t e p ro a k i h p o e s rs se s a d o h d lo e mpi e d t n mu i r s o y t m.A c r i g t h h oy o i & L ya d te t e r p v i s c c o d n te t e r f u o L a ln . h h o y o e mi mu u H a o o n o a k al ain ag r h Wa r s n e .T er s l f i l t n s o a eu i z t n ft n h i m t z t n b u d f r s lo t o i m s p e e td i i t c o l t h ut o mu a o h w t t ti a o e s s i h t h l i b u d o l ai n ag r h i e k y p n il rd f rn l h r c e z d t k s t t e e tdf r n g r h o al ae o n f l t o t m st e r cp e f i ee t c a a t r e a e s o s lc i e e ta o t mst l t ao c o l i h i o y i s l i c o t k .T ru h t e c mp r o e w n t e tt t ia in o t e t k s t d te u i z t n b u d o t e ag r m,i C e s a s h o g h o ai n b t e h a ui z t f e t iai n f o t s ol l o h a s n a h l o o h l i h t a b n
算任务调度算法
算任务调度算法任务调度算法有很多种,以下是一些常见的任务调度算法:1. 先到先服务算法(FCFS):也被称为FIFO,CPU按照进程的到达顺序处理进程,进程运行到自己放弃占用CPU。
这个调度策略既可以支持抢占也可以不支持抢占。
2. 最短工作优先算法(SJF):这个算法同样既可以支持抢占也可以不支持抢占。
该算法可以最小化地缩短每个进程的等待时间。
它可以在批处理系统中比较容易实现,因为该系统的CPU时间是可以提前知道的。
因此,它不可以在交互式系统中运行。
在这个算法中,处理器需要提前知道进程会被分配多少CPU时间。
3. 基于优先级的调度算法:基于优先级的调度算法一般上是不支持抢占的,也是在批处理系统中最常见的调度算法之一。
4. 轮转法:轮转算法是所有调度算法中最简单也最容易实现的一种方法。
轮转法简单地在一串节点中线性轮转,平衡器将新请求发给节点表中的下一个节点,如此连续下去。
这个算法在DNS域名轮询中被广泛使用。
但是简单应用轮转法DNS转换,可能造成持续访问同一节点,从而干扰正常的网络负载平衡,使网络平衡系统无法高效工作。
轮转法典型适用于集群中所有节点的处理能力和性能均相同的情况,在实际应用中,一般将它与其他简单方法联合使用时比较有效。
5. 加权法:加权算法根据节点的优先级或权值来分配负载。
权值是基于各节点能力的假设或估计值。
加权方法只能与其他方法合用,是它们的一个很好的补充。
6. 散列法:散列法也叫哈希法(Hash),通过单射不可逆的Hash函数,按照某种规则将网络请求发往集群节点。
以上信息仅供参考,具体使用哪种任务调度算法需要根据实际情况来决定。
单调速率调度算法的改进
I pr v m e t o a e m o t n c s he ul l o ih m o e n f r t - no o i c d i a g r t m ng
L IXue q a — i o, L ANG hu ng, CHEN a I S a Yu n
O 引 言
随着 嵌入 式 实 时操 作 系统 应 用 的 不 断深 人 , 多
常、 高效率工作 的任 务调度算法 , 直是实 时系统 一 领域 内研究 的 焦点 ¨ .
常见 的 嵌 入 式 系 统 调 度 算 法 有 先 来 先 服 务 ( rt o rt evc , C S 调 度 策 略 、 先 级 驱 i fs cmef ri F F ) i s e s 优
( oeeo o p a dC r E g, hnzo nvo ih .Z egh u40 0 ,hn ) C lg C m . n o . n . egh uU i fL tn ,hn zo 5 0 2 C i l f n Z . g I d a
Ab ta t Ai n ttep o lm ftecasc s t c e uigag r h t a ny d tr n ste ts S sr c : mig a h r be o h lsi t i s h d l lo tm h to l eemie h ak’ ac n i
p o t y ispe o a d c n n t g a a t e t e d i e o o g p ro n m p ra a k . ee, e i i r r y b t r d, n a o u r n e he d a ln fl n e i d a d i o tntt s s H r a n w i
一种改进的集群系统的任务调度算法

Ke y wo r ds: b a l a n c e; s c h e d u l i ng a l g o it r hm ; d y n a mi c p r e e mp t i o n t hr e s ho l d
渲染 是将 通 过 三 维 软 件 绘 制 的 3 D几 何 模 型 ,
统资源利用率 。
关键词 :负载均衡 ;调度算法 ;动态抢 占阈值
中 图分 类 号 : T P 3 6 8 文献标识码 : A d o i : 1 0 . 3 9 6 9 / j . i s s n . 1 6 7 2 - 4 3 0 5 . 2 0 1 3 . 0 3 . 0 2 7
( 天津 美术 学 院 设计 与新媒 体 艺术 实验教 学 中心 ,天 津 3 0 0 3 提 高 集 群 系 统 负 载 均 衡 能 力 的 有 效 手 段 。 为 了提 高 系 统 利 用 效 率 ,除 了 每 个 任 务 分
配优先级外 ,还提出基 于动态分配任务抢 占阈值的 L S F( L e a s t S l a c k F i r s t 最小空闲时间优先算法 )改 进算法 , 并将该设 计方法应用到渲染集群系统 中,从而有效地减少 了因任 务抢 占引起 的系统 开销和 提高 了渲染 集群 系
最 短时 间作业 优 先 算 法 ) 、 R M( R a t e M o n o t o n i c速 率
置, 由计 算机 生成 具有 真实感 效果 的 图像 , 以便后 期
编 辑得 到所需 要 的 成 品 。渲 染 应用 在 许 多 领 域 , 特别 是 在 3 D动 漫 电影 产 业 中发 挥 重 要 作 用 , 随 着
p r i o r i t y,t h i s p a p e r a l s o p r o p o s e d p r e e mp t i o n t h r e s h o l d b a s e d o n d y n a mi c a l l o c a t i o n o f t a s k s LS F i m— pr o v e d a l g o r i t h m ,a n d t he d e s i g n me t h o d a p p l i e d t o t h e r e n d e in r g c l u s t e r s y s t e m ,wh i c h e f f e c t i v e l y r e — du c e s t he t a s k p r e e mp t i o n c a u s e d o v e r h e a d a n d i mp r o v e t h e r e n d e r i n g c l u s t e r s y s t e m r e s o u r c e u t i l i z a —
一种基于任务执行预算的单调速率任务调度方法[发明专利]
![一种基于任务执行预算的单调速率任务调度方法[发明专利]](https://img.taocdn.com/s3/m/3ce53d3476eeaeaad0f33005.png)
专利名称:一种基于任务执行预算的单调速率任务调度方法专利类型:发明专利
发明人:颜纪迅,罗星原,滕涌澎,仵鹏博
申请号:CN201811342299.3
申请日:20181112
公开号:CN109558227A
公开日:
20190402
专利内容由知识产权出版社提供
摘要:本发明属于安全关键计算机任务调度技术领域,涉及一种基于任务执行预算的单调速率任务调度方法。
该任务调度方法通过为每个任务增加任务执行预算,从而保证单调速率任务调度中,较低优先级的任务同样能够具备足够的处理器调度时间,不会因为高优先级任务的故障、死锁而无法执行;同时通过计算并借用余量执行时间的方法,在确保低优先级任务可调度的情况下,尽可能避免高优先级任务激发预算超时故障。
对任务预算超时故障的处理是,计算系统当前时刻的余量执行时间,当余量执行时间大于0时,使用余量执行时间来执行发生预算超时故障的任务;当余量执行时间等于0,则将发生预算超时故障的任务切出。
申请人:中国航空工业集团公司西安飞行自动控制研究所
地址:710076 陕西省西安市雁塔区锦业路129号
国籍:CN
代理机构:中国航空专利中心
代理人:杜永保
更多信息请下载全文后查看。
rms名词解释

rms名词解释
RMS可能有多种含义,包括但不限于:
1. RMS是Root Mean Square的缩写,这是一种用于衡量波形振幅大小的方法,常用于计算信号的有效值。
2. RMS是酒店管理系统(Reservation Management System)的缩写,是
一种用于管理酒店预订和客房分配的软件系统。
3. RMS是零售管理系统(Retail Management System)的缩写,是一种用
于管理零售业务的软件系统,包括库存管理、销售分析、顾客关系管理等功能。
4. RMS是风险管理系统(Risk Management System)的缩写,是一种用于
评估和管理风险的软件系统,通常用于金融、保险等行业。
5. RMS(单调速率调度算法)是一种静态优先级调度算法,是经典的周期
性任务调度算法。
RMS的基本思路是任务的优先级与它的周期表现为单调
函数的关系,任务的周期越短,优先级越高;任务的周期越长,优先级越低。
如果想要获取特定语境下的RMS的解释,建议查阅专业领域的专业资料或
者询问相关行业从业者。
单调速率调度算法RMS
余蓝涛'(天津大学精密仪器与光电子工程学院天津300072 )摘要:嵌入式系统对强大实时处理能力的需求和相对紧张的内存及内核资源的现实,对嵌入式操作系统任务调度提出了较高的要求。
因此任务调度的算法的分析,实现和优化,对实现嵌入式系统的实时性有着重大的意义。
从算法提出的理论基础出发,深入分析了经典的单调速率调度算法的思想,特点,具体实现并重点评价了该算法的优点和局限性。
关键词:单调速率调度算法实时嵌入式系统Abstract:The zest for powerful real-time processing of embedded system and the reality of relatively scare memory and kernel resource pave way for the high request for task scheduling・ Therefore, the analysis, implementation and optimization of task scheduling algorithm have a vast meaning for the real-time system・Based on theoretical basis of classic rate-monotonic scheduling algorithm, this paper not only analyzes fundamental thought, characteristics, practical implementation of this classic algorithm in depth・ but also rate its advantages and disadvantsges・Key words: Rate-monotonic Scheduling, Algorithm. Real-time, Embedded System一,引言现在嵌入式系统得到髙速的事展。
改进的单调速率调度算法
改进的单调速率调度算法刁承;虞慧群【期刊名称】《计算机科学与探索》【年(卷),期】2011(005)006【摘要】实时系统中调度算法起着重要的作用.单调速率调度算法(rate monotonic algorithm,RM)是一种被广泛使用的调度算法,并且已被证明是一种最佳的静态优先级算法.传统的RM算法忽略上下文切换需要消耗的时间,针对此问题,提出了一种延迟抢占的改进方法.该方法考虑了上下文切换消耗时间对调度算法的影响,可以减少低优先级任务不必要的频繁抢占.通过实验证明了该方法的有效性.%Scheduling algorithms are one part of the real-time systems of high importance. Rate monotonic algorithm (RM) is a widely used real-time fixed priority algorithm, which has been proved to be optimal. Aiming at the problem that traditional rate monotonic algorithms ignore the time consumption of context switches, this paper proposes a delay preemption rate monotonic algorithm. The algorithm considers the time consumption of context switches, and can reduce the unnecessary preempting behavior to tasks which have lower priorities. The validation is also proved by experiment.【总页数】7页(P562-568)【作者】刁承;虞慧群【作者单位】华东理工大学计算机科学与工程系,上海200237;华东理工大学计算机科学与工程系,上海200237【正文语种】中文【中图分类】TP311【相关文献】1.单调速率调度算法的改进 [J], 李学桥;梁爽;陈园2.单调速率调度算法的可调度性分析与仿真 [J], 刘忠仕;戴金海;桂先洲3.混合实时事务的延期单调速率调度算法及其可调度性分析 [J], 刘云生;何冰;冉龙波4.基于单调速率调度算法的μC/OS-Ⅱ多任务周期的设计 [J], 石为人;欧国建5.基于命题投影时序逻辑的单调速率调度算法模型检测 [J], 田聪;段振华因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
摘
要 :实时 系统 中调 度 算法起 着重要 的作 用 。单调 速 率调 度 算  ̄( t n tnc loi m, M) 一种 被 re a mo oo iagrh R 是 t
广泛使用的调度算法, 并且 已被证 明是一种最佳 的静 态优先级算法。传统的 R 算法忽略上下文切换需要 M 消耗 的时间, 针对此 问题, 出了一种延迟抢 占的改进方法。该方法考虑 了上 下文切换 消耗时间对调度算 提
改进 的单调速 率调 度算法
刁 承 虞 慧群 ,
华东理工大学 计算机科学与工程 系, 上海 20 3 0 27
I pr v d Al o ihm s d o t o t n cS he ulng| m o e g rt Ba e n Ra eM no o i c d i
法 的影响 ,可 以减 少低优 先 级任 务 不必要 的 频繁抢 占。通 过 实验证 明 了该 方 法 的有 效 性 。
p o lm ha r d to a a e m o o o c a g rt si n r h i e c s m p i n o o t x w ic e ,t sp pe r r b e t tta ii n lr t n t ni l o hm g o et e tm on u i to fc n e ts th s hi a rp o— p e e a r e pto ae m o t i l o t .The a g rt os s a d l y p e m i n r t noon c a g r hm i l o hm o i r t e tm e c ns m p i n o o t x i c nsde s h i o u to f c n e t s i h s a d c n r d c h n c s a y p e m p i g b h v o o t s h c v o rp i rte . w t e , n a e u et eun e e s r r e c tn e a i rt a ksw i hha el we ro i s Thev l to s i a i i n i da a s o e y e pe m e t lopr v d b x r i n.
rh ( i m RM) s d l s dra— mefx dp o i loi m, ih h s e np o e ob p i 1 Ai n t h t i wieyu e e lt ie r rt ag r h whc a e rv dt eo t a i i y t b ma. mi ga e t
DI AO e g , Ch n YU i u Hu q n
De a t n f mp trS in ea dEn i e rn , s iaUn v ri o in ea dTe h oo y S a g a 0 2 7, i a p rme t o Co u e ce c n gn e g Ea t n i e st f e c c n lg , h h i 0 3 Chn i Ch y Sc n n 2
I N 6 SS l 73— 4l C0 DEN K YTA 8 9 8 J J ur l onte sofCo putrScen ean c o na Fr i r m of e i c d Te hno og l y
E— al cs @ vi 1 m i:f t p.63.o cr n
+ Co r s o di g a ho : m al u e 98 re p n n ut r E— i:s r n1 6@ gm al o i. r cn
DI AO e g YU iu . mp o e lo i m a e N r t n tn cs h d l g J u n l fFr n ir f Ch n , Hu q n I r v d ag rt h b s d O aemo oo i c e u i . o r a o te so n o
Ke r s e l i y tm ;sh d l g ag rtm ;rt o oo i lo i m ( ) ea r e t n r t y wo d :ra— me s se t c e ui lo i n h ae m n t nc ag rt h RM ;d ly p e mp i ae o
ht:www. a.r t / p/ c j g e o
Te :+8 l 51 60 l 6一 O一 61 56
1 7 —41 /0 /5o )0 6 ・ 7 6 3- 82 1 o (6 ・5 2- 9 1 ・ 0
D : 03 7 Ui n1 7 —4 8 0 1 60 9 Ol1 .7 8 .s.6 39 1. l. .0 h oo y 2 1 , ( ) 5 25 8 mp t rS in ea d T c n l g , 0 1 5 6 : 6 - 6 .
Absr c :S h d ln l o i t a t c e u i g a g rt hms a e o e p r ft e r a —i yse so g mp ra c .Ra e mo t n c ag — r n a to h e ltme s tm fhi h i o tn e t no o i l o