高精度符合导线严密平差(已验证)
导线网平差及精度评定程序设计平差

导线网平差及精度评定程序设计平差问题描述背景:导线网平差及精度评定程序设计平差是在测量和测绘工作中常用的一种技术方法。
它是通过对导线网观测数据进行处理和计算,得出导线网的平差结果,并评定其精度,以确保测量结果的准确性和可靠性。
背景:导线网平差及精度评定程序设计平差是在测量和测绘工作中常用的一种技术方法。
它是通过对导线网观测数据进行处理和计算,得出导线网的平差结果,并评定其精度,以确保测量结果的准确性和可靠性。
目的:本文档旨在介绍导线网平差及精度评定程序设计平差的背景和目的。
通过对平差方法和流程的解释,使读者了解导线网平差的基本原理和操作步骤,并了解如何评定导线网平差结果的精度。
这将有助于测量和测绘工作中平差的正确实施,并对测量数据进行科学的分析和解释。
目的:本文档旨在介绍导线网平差及精度评定程序设计平差的背景和目的。
通过对平差方法和流程的解释,使读者了解导线网平差的基本原理和操作步骤,并了解如何评定导线网平差结果的精度。
这将有助于测量和测绘工作中平差的正确实施,并对测量数据进行科学的分析和解释。
目的:本文档旨在介绍导线网平差及精度评定程序设计平差的背景和目的。
通过对平差方法和流程的解释,使读者了解导线网平差的基本原理和操作步骤,并了解如何评定导线网平差结果的精度。
这将有助于测量和测绘工作中平差的正确实施,并对测量数据进行科学的分析和解释。
目的:本文档旨在介绍导线网平差及精度评定程序设计平差的背景和目的。
通过对平差方法和流程的解释,使读者了解导线网平差的基本原理和操作步骤,并了解如何评定导线网平差结果的精度。
这将有助于测量和测绘工作中平差的正确实施,并对测量数据进行科学的分析和解释。
请注意:本文档仅供参考和研究使用,不可用于商业目的或作为法律依据。
建议在实际应用中,根据具体情况和专业要求,进行适当的调整和改进。
请注意:本文档仅供参考和研究使用,不可用于商业目的或作为法律依据。
建议在实际应用中,根据具体情况和专业要求,进行适当的调整和改进。
附和导线、闭合导线的简易平差与支导线的计算
否 无法计算,
所
计算的类 型
跳出提示选 择的提醒框
示
是
点击计算
是否
否
保存
是
保存结果TXT
退出
•
程 序 设 计 流 程
图
基础理论
• 计算方位角闭合差fβ,判断Sβ<fβ容
• β=α’CD -αCD
• fβ容=60或40
n:角的个数
• 分配角闭合差(平均分配),计算改正后的角
度
• V=—β/n βi改=βi+V
政
关键技术和难点
• 度分秒与弧度间的互相转换
•
public static class hddfm
•
{
•
const double pi = 3.1415926;
•
//角度转化为弧度
•
public static double angle_r(double alfa)
•
{
度
•
double alfa1, alfa2;
弧 度
•
return (alfa1 / 180d * pi);
的
•
}
•
//弧度转化为角度
相
•
public static double redian_a(double alfa)
互
•
{
•
double alfa1, alfa2;
•
alfa = alfa * 180d / pi;
转 换
•
alfa1 = Math.Floor(alfa) + Math.Floor((alfa - Math.Floor(alfa)) * 60d) / 100d;
测绘技术中的高精度导线测量方法

测绘技术中的高精度导线测量方法测绘技术是现代社会中不可或缺的一项重要技术,它涉及到地理信息、地质勘测、土地利用等多个领域。
其中,高精度导线测量方法是测绘技术中的重要方法之一。
本文将从测绘技术的重要性、高精度导线测量的原理、应用领域以及未来发展方向等方面进行论述。
首先,我们来探讨测绘技术在现代社会中的重要性。
随着城市的不断扩张和基础设施的完善,人们对地理信息的需求也越来越大。
测绘技术可以提供准确的地理信息数据,帮助规划城市、建设道路、管理资源等。
同时,它还在环境保护、农业生产等方面发挥着重要作用。
可以说,测绘技术是现代社会发展和进步的基石,没有它的支持,很多事情将无法顺利进行。
那么,什么是高精度导线测量方法呢?简单来说,它是通过使用高精度的仪器和设备,对地面上的导线进行测量,从而得到导线的准确位置和其他相关数据的一种技术方法。
在这个过程中,测量人员需要准确操作仪器,合理选择测量点、放置导线等。
而且,还需要考虑环境因素对测量结果的影响。
高精度导线测量方法广泛应用于土地测量、工程测量以及地质勘探等领域。
例如,在土地测量中,它可以用于绘制地籍图、划定土地边界等;在工程测量中,它可以用于绘制工程设计图、确定建筑物的水平位置等;在地质勘探中,它可以用于确定地壳运动、岩石构造等。
可以说,高精度导线测量方法在各个领域都发挥着不可替代的作用。
虽然高精度导线测量方法已经取得了很大的进展,但是仍然存在一些问题和挑战。
首先,仪器的精度限制了测量结果的准确性。
目前,虽然市场上有许多高精度的测量仪器,但是它们的价格较高,并不是所有人都能够购买和使用。
其次,环境因素对测量结果的影响也是一个难题。
例如,恶劣的天气条件和地形复杂等因素都会对测量结果产生一定的干扰。
此外,还需要解决数据的处理和存储等问题,以确保数据的安全和可靠性。
面对这些问题和挑战,高精度导线测量方法在未来的发展中仍然有很大的空间和潜力。
一方面,随着科技的不断发展,仪器的精度和功能将会不断提高,使得测量结果更加准确可靠。
附合导线坐标差平差法

^
∆ x (4, 5 ) = x 5 -x 4,
^
^
∆ y (4, 5 ) = y 5 -y 4
┇
┇
^
^
^
^
∆ x (8, 3 ) = x 3 -x 8, ∆ y (8, 3 ) = y 3 -y 8(14)
式中
d Δx CD =-S·sinTd ( T0+R2-R1+…… ) d Δy CD =-S·cosTd ( T0+R2-R1+…… )(19)
(16)
式中 T°CD —— 由TAB 推算出的近似方位角。
2.3 观测值Δx ( i,j ),Δy ( i ,j)权的确定
解算法方程,即可求得未知数
因为Δx ( i,j ),Δy ( i ,j)由测边,测角计算
δx =-(BTPB )-1 BTP l (12)
1.2.3 精度评定
m0 = ±
8785.0507(.0508)
6
2034.6038(.6039 )
8785.9597(.9598)
7
2261.3451(.3451)
8863.1235(.1236)
8
2293.9420(.9421)
9029.2028(.2028)
9
2298.5337(.5337)
10 2275.4310(.4310)
N = AP-1AT (3)
NK +W =0 (4)
10
∴ K = -N -1W
(5)
V = P -1AT K (6)
观测值加上改正数即得平差值
1.1.3 精度评定
m0 = ±
V T PV γ
式中
附合导线严密平差算法总结
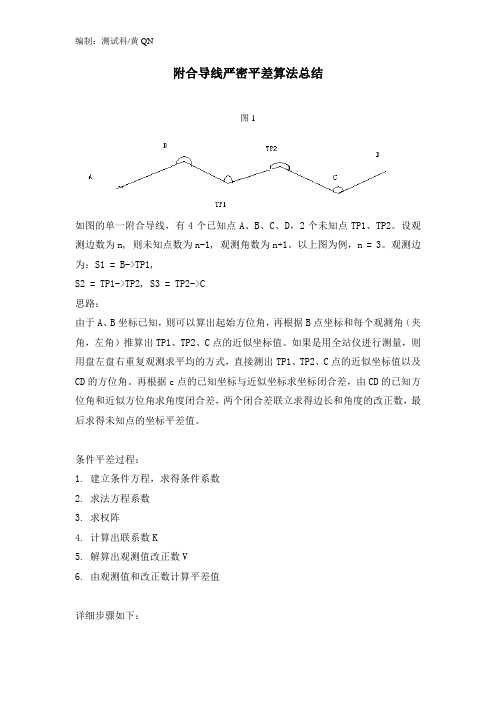
附合导线严密平差算法总结图1如图的单一附合导线,有4个已知点A、B、C、D,2个未知点TP1、TP2。
设观测边数为n, 则未知点数为n-1, 观测角数为n+1。
以上图为例,n = 3。
观测边为:S1 = B->TP1,S2 = TP1->TP2, S3 = TP2->C思路:由于A、B坐标已知,则可以算出起始方位角,再根据B点坐标和每个观测角(夹角,左角)推算出TP1、TP2、C点的近似坐标值。
如果是用全站仪进行测量,则用盘左盘右重复观测求平均的方式,直接测出TP1、TP2、C点的近似坐标值以及CD的方位角。
再根据c点的已知坐标与近似坐标求坐标闭合差,由CD的已知方位角和近似方位角求角度闭合差,两个闭合差联立求得边长和角度的改正数,最后求得未知点的坐标平差值。
条件平差过程:1.建立条件方程,求得条件系数2.求法方程系数3.求权阵4.计算出联系数K5.解算出观测值改正数V6.由观测值和改正数计算平差值详细步骤如下:1、建立条件方程在单一附合导线中,只需要三个条件方程即:方位角附合条件、纵坐标附合条件和横坐标附合条件方程。
(省略了条件方程的推导过程,详细过程请查看参考资料:《测量平差.pps》)(1)方位角附合条件[Vβi]n+11+ Wβ= 0式中,Wβ= - (T0– T CD+ [βi]n+11 - (n+1)*180°)(角度闭合差)βi ——角度观测值(夹角,左角)Vβi ——各观测角的改正数。
如果是用全站仪观测,则Wβ= - (T CD– T CD)式中,T CD ——CD的方位角观测值,T CD ——CD的已知方位角(2)纵坐标X附合条件方程[Cos TI * VSi]1n - (1/ ρ”)* [(Yn+1- Yi) * Vβi]1n - W x = 0;式中,TI——各方位角观测值(近似值)VSi——边长改正数Yn+1—— C点即终止点的横坐标Y的观测值(近似值)Yi——待定点的横坐标Y的观测值Wx = - (Xn+1- XC)XC—— C点即终止点的纵坐标X的已知值ρ” = 2062.65(3)横坐标Y附合条件方程[Sin TI * VSi]1n + (1/ ρ”)* [(Xn+1- Xi) * Vβi]1n– W Y = 0;式中,TI——各方位角观测值(近似值)VSi——边长改正数Xn+1—— C点即终止点的纵坐标X的观测值(近似值)Xi——待定点的纵坐标X的观测值WX = - (Yn+1- YC)YC—— C点即终止点的横坐标Y的已知值ρ” = 2062.652、求条件方程的系数矩阵联立3个方程得改正数条件方程组:[Vβi]n+11+ Wβ= 0[Cos TI * VSi]1n - 1/ ρ”* [(Yn+1- Yi) * Vβi]1n - W x = 0;[Sin TI * VSi]1n + 1/ ρ”* [(Xn+1- Xi) * Vβi]1n– W Y = 0;其系数矩阵arrA为:(即改正数V的系数,此处以图1为例, n = 3)3、联系数法方程(简称法方程)AP-1A T K – W = 0A——系数矩阵arrAK ——乘系数P ——权阵W ——闭合差矩阵由上得法方程的系数阵N:N = AP-1A T(权的推导见参考资料:《全站仪观测导线测量平差方法的研究.pdf》)角度权:P βi = 1;(因为角度的标称精度是固定的,各观测角权值相等) 边长权:P Si = (μ0 *μ0 ) / (M D * M D )(误差比例系数固定,边长的误差与距离有关,因此不一致)式中,μ0 ——先验测角中误差,以秒为单位 M D —— 距离观测中误差若 导线边长为S i (米),e1 为仪器的边长标称固定误差(mm ),e2为仪器的边长比例误差系数(无单位),则M D = ± (e1 + e2 * S i * 0.001)mm 需转化为厘米:M D = M D ** 0.1 (cm )由于此处是要P 的逆矩阵P -1,因此要求P 的各元素的倒数(P 是对角矩阵,对角矩阵的逆矩阵就是原矩阵元素的倒数) Psi = 1/ Psi ;由上可得,P -1 矩阵如下:4、求改正数由于N 已经在前面的步骤中求出,求N 的逆矩阵。
导线测量平差教程
计算方案的设置一、导线类型:1.闭、附合导线(图1)2.无定向导线(图2)3.支导线(图3)4.特殊导线及导线网、高程网(见数据输入一节),该选项适用于所有的导线,但不计算闭合差。
而且该类型不需要填写未知点数目。
当点击表格最后一行时自动添加一行,计算时删除后面的空行。
5.坐标导线。
指使用全站仪直接观测坐标、高程的闭、附合导线。
6.单面单程水准测量记录计算。
指仅进行单面读数且仅进行往测而无返测的水准测量记录计算。
当数据中没有输入“中视”时可以用作五等、等外水准等的记录计算。
当输入了“中视”时可以用作中平测量等的记录计算。
说明:除“单面单程水准测量记录计算”仅用于低等级的水准测量记录计算外,其它类型选项都可以进行平面及高程的平差计算,输入了平面数据则进行平面的平差,输入了高程数据则进行高程的平差,同时输入则同时平差。
如果不需进行平面的平差,仅计算闭、附合高程路线,可以选择类型为“无定向导线”,或者选择类型为“闭附合导线”但表格中第一行及最后一行数据(均为定向点)不必输入,因为高程路线不需定向点。
二、概算1.对方向、边长进行投影改化及边长的高程归化,也可以只选择其中的一项改正。
2.应选择相应的坐标系统,以及Y坐标是否包含500KM。
选择了概算时,Y坐标不应包含带号。
三、等级与限差1.在选择好导线类型后,再选择平面及高程的等级,以便根据《工程测量规范》自动填写限差等设置。
如果填写的值不符合您所使用的规范,则再修改各项值的设置。
比如现行的《公路勘测规范》的三级导线比《工程测量规范》的三级导线要求要低一些。
2.导线测量平差4.2及以前版本没有设置限差,打开4.2及以前版本时请注意重新设置限差。
四、近似平差与严密平差的选择及近似平差的方位角、边长是否反算1.近似平差:程序先分配角度闭合差再分配坐标增量闭合差,即分别平差法。
2.严密平差:按最小二乘法原理平差。
3.《工程测量规范》规定:一级及以上平面控制网的计算,应采用严密平差法,二级及以下平面控制网,可根据需要采用严密或简化方法平差。
附合导线平差计算过程说明
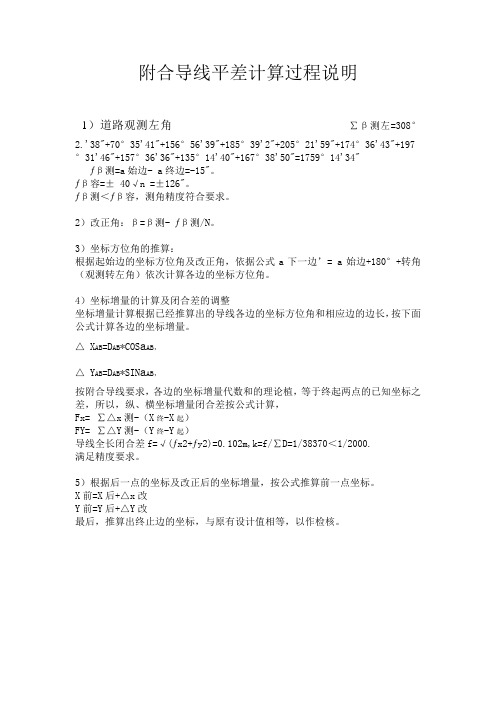
附合导线平差计算过程说明1)道路观测左角∑β测左=308°2.'38"+70°35'41"+156°56'39"+185°39'2"+205°21'59"+174°36'43"+197°31'46"+157°36'36"+135°14'40"+167°38'50"=1759°14'34"ƒβ测=a始边- a终边=-15"。
ƒβ容=± 40√n =±126"。
ƒβ测<ƒβ容,测角精度符合要求。
2)改正角:β=β测- ƒβ测/N。
3)坐标方位角的推算:根据起始边的坐标方位角及改正角,依据公式a下一边’= a始边+180°+转角(观测转左角)依次计算各边的坐标方位角。
4)坐标增量的计算及闭合差的调整坐标增量计算根据已经推算出的导线各边的坐标方位角和相应边的边长,按下面公式计算各边的坐标增量。
△ X AB=D AB*COS a AB,△ Y AB=D AB*SIN a AB,按附合导线要求,各边的坐标增量代数和的理论植,等于终起两点的已知坐标之差,所以,纵、横坐标增量闭合差按公式计算,Fx=∑△x测-(X终-X起)FY=∑△Y测-(Y终-Y起)导线全长闭合差f=√(ƒx2+ƒy2)=0.102m,k=f/∑D=1/38370<1/2000.满足精度要求。
5)根据后一点的坐标及改正后的坐标增量,按公式推算前一点坐标。
X前=X后+△x改Y前=Y后+△Y改最后,推算出终止边的坐标,与原有设计值相等,以作检核。
附和导线近似平差
三、导线测量的外业工作CAD、CASS、纬地语言编程、excel VBA语言编程、VB可视化编程、主流软件的使用(如:CAD、CASS、纬地等),其次更需要明确测量的内涵。
(一)踏勘选点选点就是在测区内选定控制点的位置。
选点之前应收集测区已有地形图和高一级控制点的成果资料。
根据测图要求,确定导线的等级、形式、布置方案。
在地形图上拟定导线初步布设方案,再到实地踏勘,选定导线点的位置。
若测区范围内无可供参考的地形图时,通过踏勘,根据测区范围、地形条件直接在实地拟定导线布设方案,选定导线的位置。
导线点点位选择必须注意以下几个方面:1、为了方便测角,相邻导线点间要通视良好,视线远离障碍物,保证成像清晰。
2、采用光电测距仪测边长,导线边应离开强电磁场和发热体的干扰,测线上不应有树枝、电线等障碍物。
四等级以上的测线,应离开地面或障碍物1.3 以上。
3、导线点应埋在地面坚实、不易被破坏处,一般应埋设标石。
4、导线点要有一定的密度,以便控制整个测区。
5、导线边长要大致相等,不能悬殊过大。
导线点埋设后,要在桩上用红油漆写明点名、编号,并用红油漆在固定地物上画一箭头指向导线点并绘制“点之记”方便寻找导线点,如图6-5所示。
(一)踏勘选点选点就是在测区内选定控制点的位置。
选点之前应收集测区已有地形图和高一级控制点的成果资料。
根据测图要求,确定导线的等级、形式、布置方案。
在地形图上拟定导线初步布设方案,再到实地踏勘,选定导线点的位置。
若测区范围内无可供参考的地形图时,通过踏勘,根据测区范围、地形条件直接在实地拟定导线布设方案,选定导线的位置。
导线点点位选择必须注意以下几个方面:1、为了方便测角,相邻导线点间要通视良好,视线远离障碍物,保证成像清晰。
2、采用光电测距仪测边长,导线边应离开强电磁场和发热体的干扰,测线上不应有树枝、电线等障碍物。
四等级以上的测线,应离开地面或障碍物1.3 以上。
3、导线点应埋在地面坚实、不易被破坏处,一般应埋设标石。
附合导线平差步骤

控制点坐标平差处理城市平面控制网的种类较多,有GPS网、三角网、边角组合网和导线网,其中导线网按等级划分为三、四等和一、二、三级。
本文以附合导线的内业数据处理为例,说明控制点坐标平差处理的方法。
导线的内业计算,就是根据起始点的坐标和起始边的坐标方位角,以及所观测的导线边长和转折角,计算各导线点的坐标。
计算的目的除了求得各导线点的坐标外,还有就是检核导线外业测量成果的精度。
(1)(2)式中n为导线观测角个数。
角度闭合差的计算公式为:f=α终边′-α终边(2-6)β测图2-21 附合导线计算示意图角度闭合差fβ的大小,表明测角精度的高低。
对于不同等级的导线,有不同的限差(即fβ容)要求,例如图根导线角度闭合差的允许值为:fβ容=±60″n(2-7)式中n为多边形内角的个数。
这一步计算见辅助计算栏,f=+41″, fβ容=±120″。
β测若f β测≤f β容,说明测角精度符合要求,此时需要进行角度闭合差的调整。
调整是应注意:当用左角计算α终边′时,改正数的符号与f β测符号相反;当用右角计算α终边′时,改正数的符号与f β测符号相同。
可将闭合差按相反符号平均分配给各观测角,而得出改正角:β=β测-f β测/n (2-8)式中n 为多边形内角的个数。
按(-f β测/n )式计算的改正数,取位至秒,填入表格第3列。
当f β测>f β容时,则说明测角误差超限,应停止计算,重新检测角度。
(3)坐标方位角的推算根据起始边的坐标方位角及改正角,用(2-5)式依次计算各边的坐标方位角,填入第5列。
αCD′=(4)2-9)、(2-10因表中,fx =+0.21m ,fy =∑Δy 测=+0.11m 。
导线全长闭合差22y x f f f +==0.24m 。
仅以f 值的大小还不能显示导线测量的精度,应当以f 与导线全长∑D 相比较,即以分子为1的分数来表示导线全长的相对闭合差K ,即fD DfK ∑∑==1 (2-13)表中,K =0.24/572.75=1/2300。
导线测量严密平差方法
全站仪观测导线测量平差方法的研究邱健壮1,赵燕2,李宗才3(1.山东农业大学水利土木工程学院,山东泰安 271018;2.龙口市土地管理局;3.临沂市岸堤水库管理局)摘要:针对全站仪观测导线能够即时直接得到待定点的近似坐标的特点,从而提出了便于实际应用的近似坐标平差和严密坐标平差方法。
分析了其原理和优点,并给出了实际操作的公式。
关键词:导线;平差;方位角;间接平差中图分类号: TU204 文献标识码:A 文章编号:1000-2324(2003)01-0096-04RESEARCH OF TRAVERSE ADJUSTMENT METHOD USING GENERAL TOTAL STATIONQIU Jian-zhuang,ZHAO Yan,LI Zong-cai(College of Water Conservancy and CivilEngineering,Shandong AgriculturalUniversity,Taian,271018,China)Abstract:On the basis of the characteristic that General Total Station can obtain immediately the approximate coordinates of point during observing traverse.This paper introduces the adjustment method of approximate and rigorous coordinates convenient to realistic application,and analysizes its theory and application advantages,and gives the formula convenient to realistic operation.Key words: traverse,adjustment,azimuth,adjustment by observation equations1 问题的提出随着全站仪在工程测量中应用的逐渐普及,采用导线作为测量的平面控制越来越广泛,导线一般多布设成单一导线。
多标段高速公路附合导线测量精度评定和不符值平差

多标段高速公路附合导线测量精度评定和不符值平差随着交通基础设施的不断完善和建设,高速公路成为人们出行的重要选择之一。
而高速公路的建设离不开精确的测量与评定。
本文将就多标段高速公路附合导线的测量精度评定和不符值平差进行探讨。
1. 背景随着交通网络的不断发展,高速公路在人们的日常生活中扮演着越来越重要的角色。
而高速公路的测量工作是保障道路通行安全和舒适性的基础。
而附合导线测量作为高速公路建设中的重要环节,其精度评定和不符值平差是值得研究和探讨的问题。
2. 附合导线测量精度评定附合导线测量精度评定是指对测量的精度进行检测和评定的工作。
在附合导线的测量中,精度评定是至关重要的,它直接关系到测量数据的准确性和可靠性。
通过对测量数据的精度评定,可以及时发现测量误差和偏差,为后续的工程建设提供可靠的数据支持。
3. 不符值平差不符值平差是指通过对测量数据中的不符值进行平差处理,以提高测量数据的准确性和可靠性。
在附合导线测量中,可能会出现一些不符值,这些不符值可能会对测量数据产生不良影响。
进行不符值平差是十分必要的,可以有效提高测量数据的精度和可靠性。
4. 高速公路附合导线测量精度评定和不符值平差的意义对高速公路附合导线的测量精度进行评定和不符值进行平差,可以为高速公路工程建设提供准确可靠的测量数据支持。
只有确保测量数据的准确性和可靠性,才能为后续的工程施工和运营提供可靠的数据保障。
对附合导线测量的精度评定和不符值平差具有重要的意义。
5. 结论在高速公路建设中,附合导线测量的精度评定和不符值平差是必不可少的环节。
只有确保测量数据的准确性和可靠性,才能为高速公路的安全运行提供可靠的数据支持。
必须重视附合导线测量精度评定和不符值平差工作,以确保高速公路的安全和舒适性。
多标段高速公路附合导线测量精度评定和不符值平差是高速公路建设中重要的工作。
只有加强对测量数据的评定和平差处理,才能为高速公路的安全运行提供可靠的数据支持。
附合导线精度的重要指标__概述及解释说明

附合导线精度的重要指标概述及解释说明1. 引言1.1 概述附合导线精度是衡量导线传输准确性的重要指标,它代表了导线信号在传输过程中的稳定性和精确性。
在现代通信和电力系统中,附合导线精度被广泛应用于综合布线、电力传输、电磁兼容性等领域。
通过对附合导线精度的深入研究和理解,我们可以更好地优化系统设计,提高数据传输效率和可靠性。
1.2 文章结构本文将围绕附合导线精度的重要指标展开论述。
首先,在第二部分将介绍什么是附合导线精度,以帮助读者全面了解其含义与作用。
紧接着,在第三部分将阐述为何附合导线精度具有重要意义,并探讨其在实际应用中的影响。
接下来,在第四部分至第六部分将逐一解释说明三个关键要点,并探讨每个要点在实际应用中的意义和影响。
最后,在结论部分总结文章内容,强调附合导线精度对于有效数据传输的重要性。
1.3 目的本文旨在阐述附合导线精度作为重要指标的概念和意义,以帮助读者全面了解该指标在通信和电力系统中的应用价值。
通过深入探讨附合导线精度对于数据传输的影响因素和实际应用案例分析,读者将能够更好地认识并理解如何优化系统设计,提高数据传输的质量和效率。
2. 附合导线精度的重要指标是测量设备中一项关键性能参数,它用来表示测量结果与真实值之间的接近程度。
在工业生产和科学研究领域中,附合导线精度的高低直接影响到测量结果的可信度和准确性。
2.1 什么是附合导线精度:附合导线精度是指在特定条件下,测量设备所提供的输出值与试验对象真实值之间的差异程度。
通常以误差或偏差来表示,越小表示测量结果越接近真实值。
2.2 为什么附合导线精度重要:附合导线精度是评估一个测量设备质量好坏的关键指标,直接决定了测量结果的准确性和可信度。
只有具备较高的附合导线精度,才能保证测量结果可以真实地反映被测试对象的特征。
此外,在实际应用中,由于不同行业对于数据准确性要求的不同以及工作环境等因素的影响,对于附合导线精度也可能存在不同程度上限制要求。
附合导线按条件平差算例共6页word资料

§9.4 附合导线按条件平差算例9.4.1附合导线的条件平差方程式如图9-6所示,符合在已知),(A A y x A ,),(C C y x C 之间的单一符合导线有n 条AB α与CDα是已知方位角。
设观测角为1β、2β、… …、1+n β,测角中误差为 ,观测边长为1s 、2s 、… …、n s ,测边中误差为si σ(=i1、2、…、n )。
此导线共有12+n 个观测值,有1-n 个未知数,故)1(2-=n t 则3)1(2)12(=--+=n n r 。
因此,应列出三个条件方程,其中一个是坐标方位角条件,另两个是纵、横坐标条件。
图9-6 单一附合导线图1、坐标方位角条件设观测角i β的改正数为i v (=i 1、2、…、+n 1),观测边i s 的改正数为si v (=i 1、2、…、n )。
由图9-6知ο180)1(ˆ11+-∑+=+=n in i BA CD βαα (9-1) 011=+∑+=a i n i v ω (9-2)式中a ω—方位角条件的不符值,按ο180)1(ˆ11+-∑+-=+=n in i CD BA a βααω (9-3) 若导线的A 点与C 点重合,则形成一闭合导线,由此坐标方位角条件就成了多边形的图形闭合条件。
2、纵、横坐标条件 设以1ˆx∆、2ˆx ∆、…、n x ˆ∆表示图中各导线边的纵坐标增量之平差值;1ˆy∆、2y ∆、…、n y ˆ∆表示图中各导线边的横坐标增量之平差值;由图可写出以坐标增量平差值表示的纵、横坐标条件。
⎪⎪⎭⎪⎪⎬⎫∑+∆∑+=∆∑+=∑+∆∑+=∆∑+=∆∆yi ni n A i n A C xi ni n A i n A C v y y y y y v x x x x x 111111ˆˆ (9-4) 令 ⎪⎪⎭⎪⎪⎬⎫--∆∑=--∆∑=)()(11A C i ny A C i nx y y y x x x ωω (9-5) 则 ⎪⎪⎭⎪⎪⎬⎫=+∑=+∑∆∆0011y yi nx xi nv v ωω (9-6) βσ以微分量代替改正数,则有将上式代入式9-6得纵坐标条件式,且同理已可得横坐标的条件式即⎪⎪⎭⎪⎪⎬⎫=+-'∑+∑=+-'∑-∑====0)(1sin 0)(1cos 1111y i i Cni si i n i x i i Cni si i ni v x x v v y y v ωραωρα (9-7)上式就是单一符合导线的纵、横坐标条件方程x ω、y ω为条件式的不符值,按⎪⎪⎭⎪⎪⎬⎫-'=-∆∑+=-'=-∆∑+=C CC i n A y C CC i nA x y y y y y x x x x x 11ωω (9-8) 式中i x 、i y 是由观测值计算的各导线点的近似坐标。
附合导线严密平差软件的应用

附合导线严密平差软件的应用摘要:导线测量过程中,角度与边长不可避免地会产生误差,使得方位角、纵横坐标产生闭合差。
平差的目的就是要合理地分配这些闭合差,求得角度、边长、坐标的最或然值,并评定精度。
本软件是本人根据导线严密平差原理利用Visual Basic语言进行开发的,具有界面直观,简单易用,计算准确等特点。
同时还可绘制出导线平面图、误差椭圆图、展点到CAD上及生成平差报告等功能。
关键词:导线;严密平差;软件;应用一、综述1.1导线布设形式介绍在测区范围内的地面上按一定要求选定的具有控制意义的点称为控制点。
将测区内相邻控制点用直线连接,总体所构成折线形式,称为导线。
其中构成导线的控制点称为导线点,折线边也称为导线边。
导线测量就是依次测定各导线边的长度和各转折角值,再根据起始数据,推算各边的坐标方位角,求出各导线点的坐标,从而确定各点平面位置的测量方法。
导线测量在建立小地区平面控制网中经常采用,尤其在地物分布较复杂的建筑区、视线障碍较多的隐蔽区及带状地区常采用这种方法。
按照不同的情况和要求,导线可布设为附合导线、闭合导线和支导线。
1.2附合导线导线从某一已知点B出发,经过1、2、3等点(新布设的未知控制点)后,最终附合到另一已知点C上。
将这种布设在两已知点间的导线形式称为附合导线。
由于B、C两高级控制点的坐标已知,故该布设形式对观测成果有严密的检核作用。
图1-1 附合导线1.3闭合导线导线从一个已知控制点B出发,经过1、2、3、4等点后,最终又回到该已知点,构成一个闭合多边形。
把这种起讫于同一点的导线形式称为闭合导线。
该导线形成的闭合多边形在客观上对于观测成果具有严密的检核作用。
闭合导线是一种特殊的附合导线。
1.4支导线从一个已知控制点出发,既不附合于另一个已知控制点,也不闭合于原来的起始点。
由于支导线缺乏检核条件,不易发现测量工作中的错误,故一般只限于在地形测量的图根导线中采用。
二、近似平差和严密平差导线测量过程中,角度与边长不可避免地会产生误差,使得方位角、纵横坐标产生闭合差。
附和导线平差计算详细教程,留着慢慢学习!
附和导线平差计算详细教程,留着慢慢学习!本篇继续讲解附和导线的内业平差。
平差顾名思义就是把总误差进行平均分配,让每个点的误差都控制在允许的范围内。
平差有两种方式,一是手动平差,二是软件平差。
本文讲解手动平差,这个过程能让新手测量员们掌握平差的原理,和相关的基础知识。
本文还是以上篇的实例来讲解,开始前先来看看上篇文章中我们外业观测的记录。
第1步,制作平差计算表并填入已知数据在Excel中按适当格式制作一个《附和导线平差计算表》(表格我已经做好了,需要的可以给我发私信),然后按要求输入起始边和附和边的起、终点坐标并计算方位角和边长。
再参照观测记录表在”测点“栏中依次填入各个测点,在”观测左角值”栏中填入每个测站测得的平均角值,在“距离”栏中填入各导线边的平均边长。
填入后的效果如下图:注:已知边的方位角和边长的计算方式很多,比如用5800计算器的Pol函数,道路之星的测站、CASS查询等。
第2步,计算角度闭合差计算角度闭合差,是为了检验外业角度观测的精度是否满足相应等级导线的技术要求。
如果实测的角度闭合差<>相关计算公式:实测角度闭合差=实测附和边方位角-理论附和边方位角实测附和边方位角=起始边方位角-N*180+实测左角值之和容许角度闭合差各等级导线有相应规定(各等级导线的技术要求在上篇文章中)。
注:N为测量站数,方位角取值范围是0度(含)到360度(不含),大于360度的减去360度,小于0度的加上360度。
本案例经计算:角度闭合差=7.1秒,容许闭合差=22秒,观测精度合格。
第3步,计算左角改正数经过角度闭合差的计算,确定外业成果合格后,就要计算左角改正数。
左角改正数=角度闭合差的相反数/测站个数改正后左角值=观测左角值+左角改正数本案例角度闭合差=7.1秒,那么左角改正数=-7.1/5=-1.42秒。
分配说明:为尽量平均分配误差,我们可将改正数保留1位小数,所以案例中每个测站分配-1.4秒,这时还有0.1秒未得到分配。
附合闭合导线平差DOC
测量班冬季培训复习题纲一.填空(每空0分,共计0分)1.水准仪的结构是由(望远镜、水准器、基座)构成的。
2. 测量工作中常用(方位角)来表示直线的方向。
3. 地面点到大地水准面的铅垂距离叫(绝对高程).4. 经纬仪导线外业测量工作的主要内容是(选点并设立标志,距离测量,角度测量)。
5. 水准测量中,水准尺的竖立应( 垂直)6. 设A为后视点,B为前视点,A点高程为35.712m,后视读数为0.983 m ,前视读数为1.149 m ,则A.B两点的高差是(—0.166 m ).7. 在测区内,选定一些具有控制意义和作用的点子称为(控制点).8. 转点在水准测量中起传递(高程)的作用.9. 距离测量的基本单位是(米).10. 方位角的角值范围是(0°--360°).11.将经纬仪安置在O点,盘左照准左测目标A点,水平盘读数为0°01′30″,顺时针方向瞄准B点,水平盘读数为68°07′12″,则水平夹角为(68°05′42″)12.地面点的空间位置是由坐标和高程决定的.13.水准测量的检核方法有测站检核和路线长度检核等.14. 测量的基本工作包括(.测角、测边、测高差)。
15. 水准仪的粗略整平是通过调节(脚螺旋)来实现的.16. 竖直角的角值范围是(0°--90°).17. 在调节水准仪粗平时,要求气泡移动的方向与左手大拇指转动脚螺旋的方向(相同).18.控制导线的布设形式一般为闭合导线和附合导线。
19.水准测量测站校核的方法有改变仪器高法、双面尺法。
20.调节目镜螺旋,可以调节十字丝清晰。
21.从基本方向的北端起,顺时针方向到某一直线的水平夹角,称为该直线的(方位角)22.经纬仪导线最终计算的目的是得到控制点的(坐标)23.水准仪的圆水准器气泡居中,表明仪器达到粗平,长水准管气泡居中,表明仪器达到精平。
24.地面上一条直线的正反方位角之间相差( 180 )度。
附合导线平差计算(函数版)

22468
数据精度
由 两 点 坐 标 , 求 得 方 位 角 , 返 还 十 进 制 角 度
∑△y = 1464.520 fy=∑△y-(Yc-Yb)= 0.016 f=√(fx*fx+fy*fy) = 0.082 K=f/∑D≈1/22468<1/15000 符合精度要求
3.43 #### 22′ 57.8″ ####### -121.569 148.092 3.43 43° 27′ 32.2″ ####### 115.012 3.43 61° 25′ 16.7″ ####### 116.022 3.43 #### 31′ 57.1″ ####### -99.987 3.43 64° 25′ 23.5″ ####### 3.43 #### 20′ 41.0″ ####### -65.986 3.43 29° 19′ 45.4″ ####### 210.005 3.43 #### 01′ 57.8″ ####### -68.994 3.43 44° 57′ 49.3″ ####### 148.645 3.43 83° 28′ 20.7″ 148.456 200.002 117.990 225.004 78.012 162.994 140.009 212.987 108.986
验 算
1801° 30′ 21″ fβ = Σ fβ 测-Σ fβ 理= -34″ fβ 允= ±10√n = ±32″ fβ >fβ 允 , 不符合精度要求
∑△x = 311.160 fx=∑△x-(Xc-Xb)=0.080 f=√(Βιβλιοθήκη x*fx+fy*fy) =
K=f/∑D≈1/22468<1/15000
线 计 算 表
附合闭合导线闭合差计算和粗差检验
方位角 AB(始)和终止边的方位角 CD(终)
为已知。外业观测资料为导线边距离和各转折角。
精选课件
22
即:
f 右 左 ( 始 终 ) n 1 80
检核: f f允 (各级导线的限差见规范)
(2)闭合差分配(计算角度改正数):
Vi f /n
i i
式中:n —包括连接角在内的导线转折角数
精选课件
桩别 备注
大铁钉
食品店
大
中西 北
18-1
庆
12.36m
路 8.75m D5
中
山
路
精选课件
15
2.导线边长测量
——测定导线各边长(往返丈量)。
1).精度要求:符合规范规定。
例:图根导线
).测距方法: 钢尺量距 电磁波测距
D往 D返 1 D平均 3000
精选课件
16
3.导线角度测量
——观测导线各转折角、连接角。
B 1
2904054
xB 1536 .86m
yB 873 .54m
A AB 236 4428
前进方向
AB
D
3
2
1672156
2024708
4
1753125
CD
C
xC 1429 .02 m
yC 1283 .17 m
2140933 CD 60 3801
如图,A、B、C、D是已知点,起始边的
精选课件
4
导线测量概述
导线测量是平面控制测量中最常 用的方法。
闭合导线
导线的已知点和新建点组成的若 干条直线(即导线边)联结成一系
列折线或闭合多边形。
附合导线
导线测量时,通常只需要前后两 点相互通视。