第七章 S7-200PLC的功能指
s7-200脉冲输出功能
一、 S7-200 PLC 高速脉冲输出功能1、概述S7-200 有两个置PTO/PWM 发生器,用以建立高速脉冲串(PTO)或脉宽调节(PWM)信号波形。
当组态一个输出为PTO 操作时,生成一个50%占空比脉冲串用于步进电机或伺服电机的速度和位置的开环控制。
置PTO 功能提供了脉冲串输出,脉冲周期和数量可由用户控制。
但应用程序必须通过PLC内置I/O 提供方向和限位控制。
为了简化用户应用程序中位控功能的使用,STEP7--Micro/WIN 提供的位控向导可以帮助您在几分钟内全部完成PWM,PTO 或位控模块的组态。
向导可以生成位置指令,用户可以用这些指令在其应用程序中为速度和位置提供动态控制。
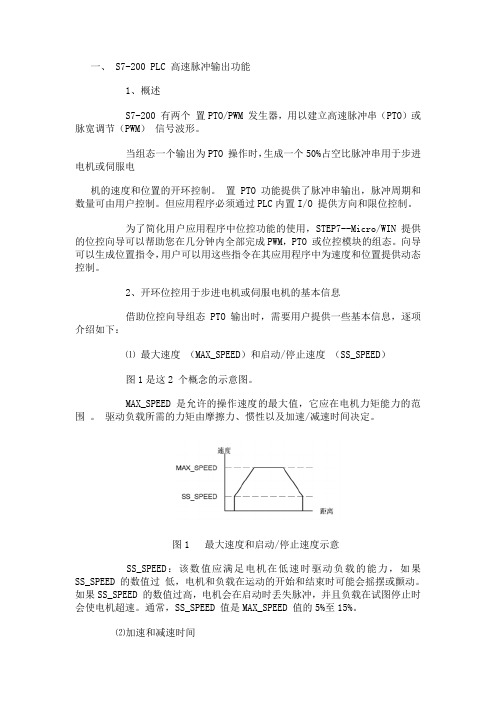
2、开环位控用于步进电机或伺服电机的基本信息借助位控向导组态PTO 输出时,需要用户提供一些基本信息,逐项介绍如下:⑴最大速度(MAX_SPEED)和启动/停止速度(SS_SPEED)图1是这2 个概念的示意图。
MAX_SPEED 是允许的操作速度的最大值,它应在电机力矩能力的范围。
驱动负载所需的力矩由摩擦力、惯性以及加速/减速时间决定。
图1 最大速度和启动/停止速度示意SS_SPEED:该数值应满足电机在低速时驱动负载的能力,如果SS_SPEED 的数值过低,电机和负载在运动的开始和结束时可能会摇摆或颤动。
如果SS_SPEED 的数值过高,电机会在启动时丢失脉冲,并且负载在试图停止时会使电机超速。
通常,SS_SPEED 值是MAX_SPEED 值的5%至15%。
⑵加速和减速时间加速时间ACCEL_TIME:电机从 SS_SPEED速度加速到MAX_SPEED速度所需的时间。
减速时间DECEL_TIME:电机从MAX_SPEED速度减速到SS_SPEED速度所需要的时间。
图2 加速和减速时间加速时间和减速时间的缺省设置都是1000 毫秒。
通常,电机可在小于1000 毫秒的时间工作。
参见图2。
这2 个值设定时要以毫秒为单位。
s7-200plc基本逻辑指令
s7-200plc基本逻辑指令PLC(可编程逻辑控制器)作为现代工业自动化领域中的重要设备,可以实现对各类生产过程的自动控制。
S7-200PLC是西门子公司推出的一款经典型号,具备较高的性能和灵活的编程功能。
本文将重点介绍S7-200PLC的基本逻辑指令,包括输入/输出指令、计算指令、转移指令和比较指令等,以帮助读者更好地理解和应用该型号的PLC。
1. 输入/输出指令输入/输出指令用于读取外部信号并控制输出动作,是PLC程序中最常用的指令之一。
S7-200PLC提供了多种输入/输出指令,其中包括XIC、XIO、OUT、SET、RST等指令。
XIC指令用于判断输入信号是否为真,XIO指令则相反,用于判断输入信号是否为假。
OUT指令用于控制输出信号为真,SET指令用于设置某个输出信号为真,RST指令则相反,用于复位某个输出信号。
2. 计算指令计算指令主要用于对PLC中的数据进行运算和处理,以满足特定的控制要求。
S7-200PLC提供了多种计算指令,包括加法、减法、乘法、除法等。
比如,ADD指令用于两个数据相加,SUB指令用于两个数据相减,MUL指令用于两个数据相乘,DIV指令用于两个数据相除。
这些计算指令可以灵活应用于各类控制场景中,提高了PLC的控制能力和灵活性。
3. 转移指令转移指令用于根据特定条件执行不同的操作,是PLC程序中的决策和跳转指令。
S7-200PLC提供了多种转移指令,包括无条件转移、条件转移、循环转移等。
例如,JMP指令用于无条件转移到指定的程序段,JMPZ指令用于当某个数值为0时转移到指定的程序段,LOOP指令用于设置循环次数并执行指定的程序段。
通过合理应用转移指令,可以实现复杂的控制逻辑和流程控制。
4. 比较指令比较指令用于判断两个或多个数据之间的大小、相等关系,并根据判断结果执行不同的操作。
S7-200PLC提供了多种比较指令,包括大于、小于、等于等。
例如,GT指令用于判断某个数值是否大于另一个数值,LT指令用于判断某个数值是否小于另一个数值,EQ指令用于判断两个数值是否相等。
西门子S7-200 SMART PLC原理及应用教程课件第七章

·类型:分为普通电阻和热敏电阻两大类,并根据接线方式不同分为两 线制、三线制和四线制。
·电阻:
—普通电阻的量程范围是48Ω、150Ω、300Ω、600Ω、3000Ω; —支持的热敏电阻的种类有Pt 10、Pt 50、Pt 100、Pt 200、Pt 500、Pt 1000、LG-Ni1000、Ni 100、Ni 120、Ni 200、Ni 500、Ni 1000、Cu 10、Cu 50、Cu 1000 ·系数:指热敏电阻的温度系数,请参考热敏电阻的说明书。 ·标尺、抑制、平滑和报警:与热电偶模块的意义相同,这里不再赘述。
4.模拟量输出
与模拟量输入模块类似,模拟量输出模块也具备用户电源诊断功能,并在“模 块参数”中默认激活,这里不再赘述。如图7-13所示的是单个输出通道的参数
组态。 在该选项卡中,需要对以下参数进行设置。
·电压信号类型,范围是-10~+10V。 ·电流信号类型,范围是0~20 mA。 ·盲出冻结:
—若勾选,则当CPU的运行状态从运行转到停止后,该模拟量输出通道保持 CPU停止之前最后一个扫描周期;
在该选项卡中,需要对以下参数进行设置。
·类型 热电偶或者电压。 ·热电偶 支持的热电偶类型有B型( PtRh-PtRh)、N型(NiCrSiNiSi)、E型(Ni-Cu-Ni).R型(PtRh-Pt)、S型(PtRh-Pt)、J型(Fe-CuNi)、 T型(Cu-CuNi)、K型(NiCr-Ni、C型( W5Re-W26Re)、 TXK/XK(TXK/XK(L))。如果选电压类型,则±80 mV。 ·标尺 可选摄氏度或华氏度。 ·源参考温度 即冷端补偿温度,可选“内部参考”或者“由参数设
如读取的数值为15000,通过(15000-5530)/P=(27648-5530)/0.5,得出当前压力 P=0.5×9470/22118=0.214 MPa。
plc第七章7.基本指令及应用
逻辑堆栈指令
S7-200可编程序控制器使用一个逻辑堆栈来 分析控制逻辑,用语句表编程时要根据这一堆 栈逻辑进行组织程序,用相关指令来实现堆栈 操作,用梯形图和功能框图时,程序员不必考 虑主机的这一逻辑,这两种编程工具自动地插 入必要的指令来处理各种堆栈逻辑操作。 S7-200可编程序控制器的主机逻辑堆栈结构如 表7-1所示。
基本逻辑指令
基本逻辑指令一般指位逻辑指令、定时器指令 及计数器指令。位逻辑指令又含触点指令、线 圈指令、逻辑堆栈指令、RS触发器指令等。这 些指令处理的对象大多为位逻辑量,主要用于 逻辑控制类程序中。
位逻辑指令
1.标准触点指令 标准触点指令有LD、LDN、A、AN、O、ON、NOT、 =指令(语句表)。这些指令对存储器位在逻辑堆栈 中进行操作。 由于堆栈存储单元数的限制,语句表中A、O、AN、 ON指令最多可以连用有限次。同样,梯形图中,最多 一次串联或并联的触点数也有一定限制,功能框图中 AND和OR指令盒中输入的个数也不能超过这个范围 标准触点指令中如果有操作数,则为BOOL型,操作 数的编址范围可以是:I、Q、M、SM、T、C、S、 VL。
//装入常开触点 //或常开触点 //被串的块开始 //被并路开始 //与常开触点 //栈装载或,并路结束 //栈装载与,串路结束 //输出触点 //装入常开触点 //逻辑推入栈,主控 //与常开触点 //输出触点 //逻辑读栈,新母线 //装入常开触点 //或常开触点 //栈装载与 //输出触点 //逻辑弹出栈,母线复 //装入常开出触点 //或常开触点 //栈装载与 //输出触点
5、LRD(逻辑读栈指令)Logic Read LRD,逻辑读栈指令。把堆栈中第二级的值复 制到栈顶。堆栈没有推入栈或弹出栈操作,但 原栈顶值被新的复制值取代。在梯形图中的分 支结构中,当左侧为主控逻辑块时,开始第二 个和后边更多的从逻辑块。应注意,LPS后第 一个和最后一个从逻辑块不用本指令。
第七章 S7-200系列PLC基本指令
2. 指令表编辑器中指令的组成与使用 如图所示,在指令表编辑器中,程序也分为一个个 的网络段,这样可方便地与梯形图进行转换。当然也可 以不分网络段,此时指令表程序不能转换。注释部分和 梯形图编辑器中相同。
指令表程序的基本构成为指令助记符+操作数。如LD I0.0,LD为指令助记符,表示具体需要完成的功能;I0.0为 操作数,表示被操作的内容。指令表属于文本形式的编程 语言,和汇编语言类似,可以解决梯形图指令不易解决的 问题,适用于对PLC和逻辑编程的有经验程序员。
I0.0 I0.1
Network2
Q0.0
Network1 LD I0.0 O I0.1 = Q0.0
I0.0 I0.1
Q0.0
Network2 Q0.1 LD I0.2 ON I0.3 = Q0.1
I0.2 I0.3
I0.2 I0.3 Q0.1
4) 指令说明 (1) O、ON指令可在多个触点并联连接时连续使用。使用次数仅受编程软 件的限制,在一个网络块中最多并联31个触点。 (2) O、ON指令可进行多重并联。
指令表格式
梯形图格式
S bit,N
bit s
N
R bit,N
bit
R N
指 S、R
令
可用操作数 I,Q,M,SM,T,C,V,S,L的位逻辑量 VB,IB,QB,MB,SMB,SB,LB,AC,常数,*VD,*AC, *LD N可设置的范围为:1~255
N
2) 指令功能 S 置位指令,将操作数中定义的N个位逻辑量强制置1。 R 复位指令,将操作数中定义的N个位逻辑量强制置0。 3) 指令应用举例
Network1
Network1 Q0.0
I0.0
S7200PLC顺序控制功能图

6.3 功能图的主要类型
• 6.3.1 单流程 • 这是最简单的功能图,其动作是一个接一个地完成。每个状态仅连接一个
转移,每个转移也仅连接一个状态。如图6-7所示为单流程的功能图、梯形 图和语句表。
6.3 功能图的主要类型
• 6.3.2 可选择的分支和联接
• 在生产实际中,对具有多流程的工作要进行流程选择或 者分支选择。即一个控制流可能转入多个可能的控制流 中的某一个,但不允许多路分支同时执行。到底进入哪 一个分支,取决于控制流前面的转移条件哪一个为真。 可选择分支和联接的功能图、梯形图如图6-8所示。
• 左限位开关LS3 I0.4
右行接触器KM3 Q0.4
• 小球右限位开关LS4 I0.5 左行接触器KM4 Q0.5
• 大球右限位开关LS5 I0.6
• 大小球检测开关SQ I0.7
• (2)系统功能图如图6-12所示,梯形图如图6-13所示。
6.4 顺序控制指令应用举例
• 6.4.2 并行分支和联接电路举例
• 2 解题
• (1)输入/输出点地址分配
• 输入点:
• 手动启动按钮 I0.0; 1#容器满 I0.1;1#容器空 I0.2;
• 2#容器满
I0.3; 2#容器空 I0.4;3#容器满 I0.5;
• 3#容器空
I0.6; 4#容器满 I0.7;4#容器空 I1.0;
• 温度传感器 I1.1
6.4 顺序控制指令应用举例
• 图6-9所示为并行分支和联接的功能图和梯形图。需要特别说 明的是,并行分支联接时要同时使状态转移到新的状态,完 成新状态的启动。另外在状态S0.2和S0.4的SCR程序段中, 由于没有使用SCRT指令,所以S0.2和S0.4的复位不能自动 进行,最后要用复位指令对其进行复位。这种处理方法在并 行分支的联接合并时会经常用到,而且在并行分支联接合并 前的最后一个状态往往是“等待”过渡状态。它们要等待所 有
7-西门子S7-200系列PLC应用指令解析

电气控制与PLC
6
高速计数器指令
2018/10/14
电气控制与PLC
7
时钟指令
读实时时钟指令(TODR):从硬件时钟中读取当前日期,并把它装载到一个8字节、 起始地址为T的时间缓冲区。 写实时时钟指令(TODW):将当前时间和日期写入硬件时钟,当前时钟存储在以地 址T开始的8字节时间缓冲区中。时钟指令见表。 使ENO=0的错误条件:间接寻址(代码:0006)、TOD数据错误(代码:0007,只对 写实时时钟指令有效)、时钟模块不存在(代码:000C)。 时钟指令所有日期和时间值必须按照BCD码的格式编码,如图所示。 时间和日期(TOD)时钟在电源掉电或内存丢失后,初始化日期和时间为:日期01Jan-90、时间00:00:00、星期日。
LAD BGN-ITIME EN ENO OUT FBD BGN-ITIME EN ENO OUT BITIM OUT IN: ID、QD、VD、MD、SMD、SD、 LD、HC、AC、*VD、*LD、*AC OUT: ID、QD、VD、MD、SMD、SD、 LD、AC、*VD、*LD、*AC CITIM IN,OUT STL
时间间隔定时器指令
时间间隔定时器指令:触发时间间隔指令(BITIM)和计算时间间隔指令(CITIM)。 BITIM指令:读内臵的1ms计数器的当前值,并将此值存储到OUT中,双字ms值的最 大定时间隔是2的32次幂或49.7天。 CITIM指令:计算当前时间和IN提供的值之间的时间差,时间差被存储到OUT中,双 字ms值的最大定时间隔是2的32次幂或49.7天。依据BITIM指令执行的时间,CITIM自动 处理在最大间隔内发生的1ms定时器翻转。
2018/10/14
S7-200 SMART PLC 系统功能说明(图文并茂)

Page 1 of 58
存储卡
S 7 2 0 0S M A R TC P U支持商用M i c r o S D 卡(支持容量为4 G ,8 G ,1 6 G ):可用于程序传输,C P U 固件更新,恢复 C P U出厂设置。 打开C P U 本体数字量输出点上方的端子盖,可以看到右侧有一卡槽,将M i c r o S D 卡缺口向里插入,如图 1 所示:
S7-200 SMART 实时时钟
S 7 2 0 0S M A R T 的硬件实时时钟可以提供年、月、日、时、分、秒的日期/ 时间数据。 C P UC R 4 0A C / D C / R e l a y没有内置的实时时钟,C P US R 2 0 、C P US R 4 0 、C P US T 4 0 、C P US R 6 0 、C P US T 6 0 支持内置的实时时钟,C P U 断电 状态下可保持7 天。 S 7 2 0 0S M A R TC P US R 2 0 的时钟精度是± 1 2 0秒 /月,C P US R 4 0 、C P US T 4 0 、C P US R 6 0 、C P US T 6 0 的时钟精度是 1 2 0秒 /月。 S 7 2 0 0S M A R TC P U靠内置超级电容为实时时钟提供电源缓冲,保持时间为典型值7 天,最小值6 天。缓冲电源放电完毕后,再次上电后 时钟将停止在缺省值,并不开始走动。 注意:因为 C P UC R 4 0无内置超级电容,所以实时时钟无电源缓冲,尽管用户可以使用R E A D _ R T C和 S E T _ R T C指令设置日期/ 时间 数据,但是当 C P UC R 4 0断电并再次上电时,这些日期/ 时间数据会丢失,上电后日期时间数据会被初始化为2 0 0 0 年1 月1 日。 为了提高运算效率,应当避免每个程序周期都读取实时时钟。实际上可读取的最小时间单位是1 秒,可每秒读取一次(使用S M 0 . 5 上 升沿触发读取指令)。 使用程序读取的实时时钟数据为B C D 格式,可在状态表中使用十六进制格式查看。 要设置日期、时间值,使之开始走动,可以:
S7-200PLC功能指令

S7-200PLC功能指令4.4 S7-200 PLC的功能指令PLC的功能指令(Functional Instruction)或称应⽤指令,是指令系统中满⾜特殊控制要求的那些指令。
在本节中主要介绍数据处理指令、数据运算指令、转换指令、表功能指令、程序控制类指令、中断指令、⾼速计数器指令、⾼速脉冲指令等。
1.指令格式指令的梯形图格式主要以指令盒的形式表⽰,如图4-49所⽰:图4-49 指令的梯形图格式指令盒的顶部为该指令的标题,如MOV_B,⼀般由两部分组成,前⾯部分为指令的助记符,后⾯部分为参与运算的数据类型,B表⽰字节,W表⽰字,DW表⽰双字、R表⽰实数、I表⽰整数、DI表⽰双整数。
指令的指令表格式也分为两部分,如字节传送指令的指令表格式为:MOVB IN,OUT。
前⾯部分为指令的助记符,后⾯部分为指令的操作数,其中“IN”为源操作数,“OUT”为⽬的操作数。
为了节省篇幅,对每条功能指令的操作数的内容即数据类型做如下约定:字节型:VB、IB、QB、MB、SB、SMB、LB、AC、*VD、*LD、*AC和常数。
字型及INT型:VW、IW、QW、MW、SW、SMW、LW、AC、T、C、*VD、*LD、*AC和常数。
双字型及DINT型:VD、ID、QD、MD、SD、SMD、LD、AC、*VD、*LD、*AC和常数。
2.指令的执⾏条作和运⾏情况指令梯形图格式中的“EN”端是允许输⼊端,为指令的执⾏条件,只要有“能流流⼊EN 端,指令就执⾏。
要注意的是:只要条件存在,该指令会在每个扫描周期执⾏⼀次,如果希望只执⾏⼀次,要在“EN”前加⼀条跳变指令。
在语句表(STL)程序中没有EN允许输⼊端,允许执⾏STL语句的条件是栈顶的值必须是“1”。
4.ENO状态(⽤于指令的级联)指令盒的右边设有“ENO”使能输出,若EN端有“能流”且指令被准确⽆误地执⾏了,则ENO端会有“能流”输出,传到下⼀个程序单元,如果指令运⾏出错,ENO端状态为0。
简述s7-200plc工作原理

简述s7-200plc工作原理
S7-200 PLC(可编程逻辑控制器)工作原理可以简述如下:
1. 输入模块:S7-200 PLC通过输入模块检测外部信号,如传
感器、按钮等。
输入信号经过处理和转换后,传递给CPU进
行处理。
2. CPU(中央处理器):CPU是PLC的核心部分,负责执行
用户程序。
它接收来自输入模块的信号,并根据用户设定的程序逻辑进行处理,以确定输出的开关状态。
3. 内存:PLC通过内存储存用户编写的程序和数据。
程序存
储在程序存储器中,数据存储在数据存储器中。
CPU从内存
中获取程序指令,根据指令逻辑进行计算并更新数据。
4. 输出模块:CPU根据程序逻辑计算得出的结果,通过输出
模块控制开关状态,控制外部设备的操作。
输出信号经过输出模块的转换和处理后,送达外部设备。
5. 编程软件:PLC编程软件用于用户编写PLC的控制程序。
用户可以在软件界面上输入程序逻辑,并进行在线调试和监测。
6. 通信接口:PLC可以通过通信接口与其他设备进行数据交
换和远程控制。
用户可以通过通信接口连接计算机、上位机、人机界面等设备,实现对PLC的编程、监测和控制。
综上所述,S7-200 PLC通过输入模块接收外部信号,CPU根
据编写的程序逻辑进行计算,并根据计算结果通过输出模块控制外部设备的工作状态,从而实现自动化控制。
第7章 S7-200系列PLC基本指令

第7章 S7-200系列PLC基本指令 S7-200系列PLC基本指令
3. 边沿触发指令(脉冲生成) 边沿触发指令(脉冲生成) (1) EU(Edge Up):上升沿微分输出指令。 (2) ED(Edge Down):下降沿微分输出指令。
第7章 S7-200系列PLC基本指令 S7-200系列PLC基本指令
例7-10 断电延时型定时器应用示例
第7章 S7-200系列PLC基本指令 S7-200系列PLC基本指令
7.1.4 定时器指令
应当注意:对于S7-200系列PLC的定时器,时基分别为1ms、 应当注意 10ms、100ms定时器的刷新方式是不同的。1ms时基定时器,每隔 1ms定时器刷新一次当前值,与扫描周期和程序处理无关,扫描周期较 长时,定时器在一个周期内可能多次被刷新,其当前值在一个周期内不 一定保持一致;10ms定时器,在每个扫描周期开始时刷新,在每个扫 描周期内,当前值不变;100ms定时器在该定时器指令执行时被刷新。
第7章 S7-200系列PLC基本指令 S7-200系列PLC基本ቤተ መጻሕፍቲ ባይዱ令
7.1.1 基本位操作指令
基本逻辑指令的语句表由指令助记符和操作数两部分组成,操作数 由可以进行位操作的寄存器元件及地址组成。常用位操作指令助计符的 定义如下所述: (1)LD(Load):装载指令,对应梯形图从左侧母线开始,连接常开 触点。 (2)LDN(Load Not):装载指令,对应梯形图从左侧母线开始,连 接常闭触点。 (3)A(And):与操作指令,用于常开触点的串联。 (4)AN(And Not):与操作指令,用于常闭触点的串联。 (5)O(Or):或操作指令,用于常开触点的并联。 (6)ON(Or Not):或操作指令,用于常闭触点的并联。 (7)=(Out):置位指令,线圈输出。
电气控制与PLC第七章-zhm

第七章
S7-200系列PLC基本指令 及逻辑控制应用技术
内
外
3、定时器指令
• S7-200系列PLC的定时器是对内部时钟累计时间 增量计时的。每个定时器均有一个16位的当前值 寄存器用以存放当前值(16位符号整数)和一个 16位的预置值寄存器用以存放时间的设定值;还 有一位状态位,反应其触点的状态。 • S7-200系列PLC提供三种类型的定时器:
TON (接通延时定时器)、 TOF (断开延时定时器)、 TONR (记忆接通延时定时器), 共256个定时器。
• 启动后,正转搅拌5s,停2s,再反转5s,停2s为一个工作循 环;循环运行3个周期后停机。
第三节 梯形图程序的经验设计法
• 一、以典型的功能电路拼凑,经修改完成 常用电路启保停电路。
例1:以两名小孩、青年学生1人、两名成人组成抢答组; 要求:1、小孩两人中任1人抢答则小孩抢答成功;成人需两人同时抢答, 抢答才成功;青年学生1人独立抢答。 2、主持人按“抢答”键后5s内有人抢答则幸运彩球旋转。
√
×
立即触点指令
只用于输入量I (改错题)
常开立即触点指令:LDI、AI、OI 常闭立即触点指令:LDNI、ANI、ONI
符号:I 符号:/I
在指令执行时:立即读入物理输入点的值,依据该值决定触点的接通或断开状态, 但并不更新该物理输入点对应的输入过程映像寄存器。 当物理输入点状态为1时,常开立即触点闭合 当物理输入点状态为0时,常闭立即触点闭合 即:将物理输入值存入栈顶
电气控制与PLC应用技术第7章 S7-200PLC的通信与网络

7.2.2
S7-200 PLC支持的通信协议
其中专用的通信协议有PPI、MPI、自由口和 USS等;通用协议有 PROFIBUS、AS-i、工业以太 网、Modbus和Modem等 1.PPI协议
PPI 协议是点对点通信协议,它是一个主/从协议。 在PPI协议中,所有S7-200 PLC都默认为从站, 主站可以是其他CPU主机(如S7-300/400等)、 编程用计算机或SIMATIC编程器、文本显示器或 触摸屏等。标准的PPI通信距离为50m,如果使用 一对RS-485中继器,通信距离可以达到1200m。
第7章 S7-200 PLC通信与网络
主要内容
通信及网络的基础知识 S7-200 PLC通信与网络
S7-200 PLC通信接口及网络部件
S7-200 PLC通信指令及应用
7.1 通信及网络的基础知识
数据通信:就是将数据信息通过适当的传输线 路从一台机器传送到另一台机器。 这里的机器可以是计算机、PLC或具有通信功 能的其他数字设备。 数据通信系统:由传送设备、传送控制设备和 传送协议及通信软件等组成。
7.2.2 S7-200 PLC支持的通信协议
4.自由口协议
自由口协议是用户自定义通信协议,并通过用 户程序对通信口进行操作。 通过设置特殊存储字节SM30(端口0)或SM130 (端口1)可以选择自由口通信模式。 当选择自由口通信模式时,通信协议完全由用 户程序控制,用户可以通过发送指令(XMT)和发 送中断、接收指令(RCV)和接收中断来控制通信 口的操作。 自由口通信模式只限在CPU处于RUN模式时才能 使用,当CPU处于STOP模式时,自由口通信被停止, 通信口自动转换为正常的PPI协议模式。
7.1.1 串行通信的基础概念
S7-200PLC使用说明书及编程软件
S7-200 PLC 使用说明一、 PLC 的结构与工作原理PLC 的结构PLC 的类型繁多,功能和指令系统也不尽相同,但结构与工作原理则大同小异,通常由主机、输入/输出接口、电源、编程器扩展器接口和外部设备接口等几个主要部分组成。
1. 主机主机部分包括中央处理器(CPU )、系统程序存储器和用户程序及数据存储器。
CPU 是PLC 的核心,它用以运行用户程序、监控输入/输出接口状态、作出逻辑判断和进行数据处理,即读取输入变量、完成用户指令规定的各种操作,将结果送到输出端,并响应外部设备(如编程器、电脑、打印机等)的请求以及进行各种内部判断等。
PLC 的内部存储器有两类,一类是系统程序存储器,主要存放系统管理和监控程序及对用户程序作编译处理的程序,系统程序已由厂家固定,用户不能更改;另一类是用户程序及数据存储器,主要存放用户编制的应用程序及各种暂存数据和中间结果。
2. 输入/输出(I/O )接口I/O 接口是PLC 与输入/输出设备连接的部件。
输入接口接受输入设备(如按钮、传感器、触点、行程开关等)的控制信号。
输出接口是将主机经处理后的结果通过功放电路去驱动输出设备(如接触器、电磁阀、指示灯等)。
I/O 接口一般采用光电耦合电路,以减少电磁干扰,从而提高了可靠性。
I/O 点数即输入/输出端子数是PLC 的一项主要技术指标,通常小型机有几十个点,中型机有几百个点,大型机将超过千点。
3. 电源图中电源是指为CPU 、存储器、I/O 接口等内部电子电路工作所配置的直流开关稳压电源,通常也为输入设备提供直流电源。
4. 编程器编程器是PLC 的一种主要的外部设备,用于手持编程,用户可用以输入、检查、修改、调试程序或监示PLC 的工作情况。
除手持编程器外,还可通过适配器和专用电缆线将PLC 与电脑联接,并利用专用的工具软件进行电脑编程和监控。
5. 输入/输出扩展单元I/O 扩展接口用于连接扩充外部输入/输出端子数的扩展单元与基本单元(即主机)。
S7-200plc的基本指令及编程

堆栈 是一
组能够存 储和取出 数据的暂 时存储单 元。
堆栈 结构
S0 S1 S2 S3 S4 S5 S6 S7 S8
名称
STACK 0 STACK 1 STACK 2 STACK 3 STACK 4 STACK 5 STACK 6 STACK 7 STACK 8
3.编程顺序 梯形图按照从上到下,从左到右 的顺序绘制。 4.编号分配 对外部输入/输出设备分配编号, 编号的分配必须是主机或扩展模块 本身实际提供的,而且是用来进行 编程的。
5.内、外触点的配合
在梯形图中选择输入继电器的触点类型(内 部触点)与两方面的因素有关: 一是输入设备的触点类型(外部触点) 二是控制电路的实际通断要求。 输入设备的触点类型与输入继电器触点类型 的*异或结果*决定了控制电路的实际通断
I0.0 I0.1 Q1.0 Q0.0 Q0.2-Q0.4
Q1.0=I0.0*I0.1 Q0.0(SET)=I0.0*I0.1 Q0.2-Q0.4(RESET)=I0.0*I0.1
4.立即指令
立即指令允许对输入和输出点进行快速 和直接存取 当用立即指令读取输入点的状态时,相 应的输入映像寄存器中的值并未发生更新; 用立即指令访问输出点时,访问的同时, 相应的输出寄存器的内容也被刷新。
位操作类指令 ,主要是指位操作及
位运算指令,同时也包含与位操作密切相关 的定时器和计数器指令。
一、指令格式及说明方式约定
1.本章所介绍的指令都给出了梯形图 LAD、语句表STL两种最常用的编程语言的 表达形式,部分指令给出了功能框图FBD形 式,用以说明功能框图的应用特点。
西门子S7-200PLC功能及作用介绍

西门子S7-200PLC功能及作用介绍SIMATIC S7-200 SMARTSIMATIC S7-200 SMART是西门子公司经过大量市场调研,为中国客户量身定制的一款高性价比小型PLC产品。
结合SINAMICS驱动产品及SIMATIC人机界面产品,以S7-200 SMART为核心的小型自动化解决方案将为中国客户创造更多的价值。
RUN模式下的CiR配置可在RUN模式下更改参数分配:否电源电压DC24V:是输入电流耗用电流,典型值:40mA来自背板总线DC5V,典型值:80mA功率损失功率损失,典型值:1.5W模拟输入模拟输入端数量:2;电阻温度计温度测量的技术单位,可调整:是;摄氏度/华氏度输入范围电阻温度计:是;电阻传感器:Pt10,Pt50,Pt100,Pt200,Pt500,Pt1000,Ni100,Ni120,Ni200,Ni500,Ni1000,Cu10 ,Cu50,Cu100,LG-Ni1000电阻:是;48Ω,150Ω,300Ω,600Ω,3000Ω,输入范围(额定值),电阻温度计Cu10:是输入电阻(Cu10):10ΩNi100:是输入电阻(Ni100):100ΩNi1000:是输入电阻(Ni1000):1000ΩLG-Ni1000:是输入电阻(LG-Ni1000):1000ΩNi120:是输入电阻(Ni120):120ΩNi200:是输入电阻(Ni200):200ΩNi500:是输入电阻(Ni500):500ΩPt100:是输入电阻(Pt100):100ΩPt1000:是输入电阻(Pt1000):1000ΩPt200:是输入电阻(Pt200):200ΩPt500:是输入电阻(Pt500):500Ω输入范围(额定值),电阻0至150欧姆:是0至300欧姆:是0至48欧姆:是0至600欧姆:是0至3000欧姆:是电阻温度计(RTD)电压输入允许的输入电压(毁坏限制),最大值:30V电阻测量电压输入允许的输入电压(毁坏限制),最大值:30V模拟值构成测量原理:SigmaDelta集成和转换时间/每通道分辨率分辨率(包括过调制范围):15位+VZ带有过调制的分辨率(包括符号在内的位数),最大值:15bit;150、300、600和3000欧姆时;否则15位+VZ可参数化的集成时间:是;10/16.67/20/100ms测量值滤波可参数化:是;使用数字滤波分4个等级等级:无:是;1x等级:弱:是;4x等级:中等:是;16x等级:强:是;32x防护等级和防护类别IP20:是标准、许可、证书CE标记:是机械/材料外壳类型(正面):塑料尺寸宽度:45mm高度:100mm深度:81mm重量重量,约:148.7g。
PLC-第7章S7-200系列plc基本指令及逻辑控制应用技术

顺序起停控制梯形图:
• 通电延时定时器实现断电延时的功能:
• 实例:某锅炉鼓风机和引风机的控制时序如下 图,要求鼓风机比引风机晚8s启动,引风机比 鼓风机晚18s停机,请设计梯形图控制程序。
PLC端子I/O分配表:
输入端口
输出端口
启动按钮:I0.0 停止按钮:I0.1
方案2:
二、有记忆接通延时定时器
TONR,有记忆接通延时定时器指令。用于对许多间隔的累计定时。 对于保持型通电延时定时器,则当输入IN为“1”时,定时器计时(数 时基脉冲);当IN为“0”时,其当前值保持(不象TON一样复位)下次IN 再为1时,Txxx当前值从原保持值开始再往上加,将当前值与设定值PT作比 较,当前值大于等于设定值时,则定时器状态置“1”,以后即使IN再为 “0”也不会使定时器复位,要令定时器复位必须用复位指令。 指令格式:TON R Txxx,PT
S7-200系列可编程控制器基本指令
1. 简单逻辑指令 2. 置位/复位和脉冲微分指令 3. 定时器指令 4. 计数器指令 5. PLC循环扫描的工作方式 6. 梯形图程序经验设计法
返回主页 上一章 下一章
1
1. 简单逻辑程序
基本逻辑电路
简单逻辑指令示例
图1 简单逻辑指令程序及时序图
3
2. 置位/复位指令
保持型通电延时定时器程序及时序图:
三、断开延时定时器
TOF,断开延时定时器指令。用于断开后的单一间隔 定时。当使能输入由接通到断开时,定时器开始计数,当 前值达到预设值时,定时器位动作,当前值等于预设值, 停止计数。
指令格式:TOF Txxx,PT 例:TOF T35,6
• 实例:某锅炉鼓风机和引风机的控引风机比 鼓风机晚18s停机,请设计梯形图控制程序。
S7-200_PLC的复杂功能指令-1(07)

主讲: 主讲: s7s7-200
机电一体化
§7-12 高速脉冲输出指令
1. 高速脉冲输出的几个概念 1) 高速脉冲输出的形式 ● 高速脉冲串输出 PTO :
( Pulse Train Output )
输出指定数量,占空比为50% 的方波脉冲串。 输出指定数量,占空比为50% 的方波脉冲串。 指定数量
PTO的种类 3) PTO的种类
PTO方式下,要输出多段脉冲串时, PTO方式下,要输出多段脉冲串时,允许脉 方式下 冲串排队。PTO输出多段脉冲的方式有两种: 冲串排队。PTO输出多段脉冲的方式有两种: 输出多段脉冲的方式有两种 ●单段PTO:定义一个脉冲串,输出一个脉冲 单段PTO 定义一个脉冲串 输出一个脉冲 PTO: 脉冲串, 特性参数通过特殊寄存器分别定义) 串 (特性参数通过特殊寄存器分别定义) 。 多段PTO 集中定义多个脉冲串 PTO: 多个脉冲串, ●多段PTO:集中定义多个脉冲串,按顺序输 出多个脉冲串(特性参数通过包络表集中定义) 。 多个脉冲串(特性参数通过包络表集中定义)
● 宽度可调脉冲输出 PWM :
( Pulse Width Modulation )
数量不限, 的脉冲串信号。 输出数量不限 占空比可调的脉冲串信号 输出数量不限,占空比可调的脉冲串信号。
2) 高速脉冲输出端子
每台CPU可以提供 高速脉冲发生器 每台CPU可以提供 2 个高速脉冲发生器 CPU 发生器0 ● PTO/PWM 发生器0 的输出端子是 Q0.0 发生器1 ● PTO/PWM 发生器1 的输出端子是 Q0.1
SM×6.5 SM×
PTO 包络 因用户命令 终止 无错, 0:无错, 1:终止
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
7.1 传送、移位和填充指令
• 移位寄存器存储单元的移出端与SM1.1(溢出)相连,所以 最后被移出的位放在SM1.1位存储单元。移位时,移出位进 入SM1.1,另一端自动补上DATA移入的值。 • 移位方向分为正向移位和反向移位。正向移位时长度N为正 值,移位是从最低字节的最低位(S-BIT)移入,从最高字 节的最高位移出;反向移位时长度N为负值,移位是从最高 字节的最高位移入,从最低字节的最低位(S-BIT)移出。 • 数据类型:DATA和S-BIT为BOOL型,N为字节型,可以指 定的移位寄存器最大长度为64位,可正可负。 • [例7-4 ] 寄存器移位指令举例。 • LD I0.0 • EU • SHRB I0.5,V20.0,5 • SHRB指令执行结果如表7-1所示。
• • • • •
• •
7.1 传送、移位和填充指令 例7-2 移位指令举例。 LD I0.0 SLB VB0,2 SRW VW10,3 例题中若VB0中的内容为00110101,则执行SLB指令 后,VB0中的内容变为11010100;若VW10中的内容 为0011010100110101,则执行SRW指令后, VW10中的内容变为0000011010100110。 2. 循环移位指令( Rotate ) 循环移位指令包括循环左移和循环右移,循环移位 位数的长度分别为字节、字或双字。循环数据存储 单元的移出端与另一端相连,同时又与SM1.1(溢 出)相连,所以最后被移出的位移到另一端的同时, 也被放到SM1.1位存储单元。
7.1 传送、移位和填充指令
7.1 传送、移位和填充指令
• 7.1.2 移位与循环指令 • 该指令包括左移和右移、左循环和右循环。在该类指令中, LAD与STL指令格式中的缩写是不同的。 • 1.移位指令(Shift) • 该指令有左移和右移两种。根据所移位数的长度不同可分为 字节型、字型和双字型。移位数据存储单元的移出端与 SM1.1(溢出)相连,所以最后被移出的位被放到SM1.1位 存储单元。移位时,移出位进入SM1.1,另一端自动补0。 • 例如,在右移时,移位数据的最右端的位移入SM1.1,则左 端补0。 • SM1.1始终存放最后一次被移出的位,移位次数与移位数据 的长度有关,如果所需移位次数大于移位数据的位数,则超 出次数无效。如字左移时,若移位次数设定为20,则指令实 际执行结果只能移位16次,而不是设定值20次。
第七章 S7-200PLC的功能指令
• 随着计算机技术的发展,PLC除了有丰富的逻辑指令外,还 有丰富的功能指令。实际上,现在的PLC就是一个计算机控 制系统。为了满足工业控制的需要,PLC生产厂家为PLC增 添了过程控制、数据处理和特殊功能的指令,这些指令我们 称为功能指令(Function Instruction)。这些功能指令的 出现,极大地拓宽了PLC的应用范围,增强了PLC编程的灵 活性。 • S7-200系列PLC的功能指令主要包括以下类型: • 传送、移位及填充指令 • 算术运算与逻辑运算指令 • 数据转换指令 • 高速处理指令 • 通信指令 • PID指令
7.1 传送、移位和填充指令
• 7.1.3 字节交换指令 • 指令格式:LAD及STL格式如图7-3(a)所示。 • 功能描述:字节交换指令(Swap Byte )将字型输入数据IN 的高字节和低字节进行交换。 • 数据类型:输入为字。 • [例7-5] 字节交换指令举例。 • LD I0.0 • EU • SWAP VW10 • 例题中若VW10中的内容为1011010100000001,则执行 SWAP指令后,VW10中的内容变为0000000110110101。
7.1 传送、移位和填充指令
• 如果移位操作使数据变为0,则零存储器标志位(SM1.0)自 动置位。 • (1)右移指令 • 指令格式:LAD及STL格式如图7-2(a)所示。图中 □处可 为B、W、DW(LAD)或D(STL)。 • 功能描述:把字节型(字或双字型)输入数据IN右移N位后, 在将结果输出到OUT所指的字节(字或双字)存储单元。最大 实际可移位次数为8位(16位或32位)。 • 数据类型:输入输出均为字节(字或双字),N为字节型数据。 • (2)左移指令 • 指令格式:LAD及STL格式如图7-2(b)所示.图中□可为B、W、 DW(LAD)或D(STL)。 • 功能描述:把字节型(字型或双字型)输入数据IN左移N位 后,再将结果输出到OUT所指的字节(字或双字)存储单元。 最大实际可移位次数为8位(16位或32位)。
7.1 传送、移位和填充指令
• 例如在循环右移时,移位数据的最右端位移入最左端,同时 又进入SM1.1。 SM1.1始终存放最后一次被移出的位。移位 次数与移位数据的长度有关,如果意味次数设定值大于移位 数据的位数,则在执行循环移位之前,系统先对设定值取以 数据长度为底的模,用小于数据长度的结果作为实际循环移 位的次数。 • (1)循环右移指令 • 指令格式:LAD及STL格式如图7-2(c)所示.图中□处可为B、 W、DW(LAD)或D(STL)。 • 功能描述:把字节型(字型或双字型)输入数据IN循环右移 N位后,再将结果输出到OUT所指的字节(字或双字)存储 单元。实际移位次数为系统设定值取以8(16或32)为底的 模的结果。 • 数据类型:输入输出均为字节(字或双字),N为字节型数 据。
7.1 传送、移位和填充指令
• 功)由IN传送到OUT所指的存储单元。 • 数据类型:输入输出均为字节(字、双字或实数)。 • 2. 块传送(Block Move ) • 该类指令可用来进行一次多个(最多255个)数据的传送,它 包括字节块传送、字块传送和双字块传送。 • 指令格式:LAD及STL格式如图7-1(b)所示。图中□处可 为B、W、DW(LAD)、D(STL)或R。 • 功能描述:把从IN开始的N个字节(字或双字)型数据传送到 从OUT开始的N个字节(字或双字)存储单元。 • 数据类型:输入输出均为字节(字或双字),N为字节。 • 3. 字节立即传送(Move Byte Immediate ) • 字节立即传送指令就像位指令中的立即指令一样,用于输入 和输出的立即处理。
第七章 S7-200PLC的功能指令
• 指令介绍中约定如下: • (1)指令格式 给出了指令的梯形图和语句表格式。上面 的指令盒为LAD格式,下面为指令的STL格式。 • (2)功能描述 详细描述了指令的功能,讲解了使用中的 注意事项。 • (3)字符含义 B表示字节,W表示字,I表示整数,DW 表示双字(LAD中),DI表示双整数(LAD中),D表示 双字或双整数(STL中),R表示实数。 • (4)数据类型 对操作数的内容,本书有如下约定: • 字节型包括 VB、IB、QB、MB、SB、SMB、LB、AC、 *VD、*LD、*AC和常数; • 字型及INT型包括:VW、IW、QW、MW、SW、SMW、 LW、AC、T、C、*VD、*LD、*AC和常数。
7.1 传送、移位和填充指令
• 3. 寄存器移位指令(Shift Register) • 指令格式:LAD及STL格式如图7-2(e)所示。 • 功能描述:该指令在梯形图中有三个数据输入端,即DATA 为数值输入,将该位的值移入移位寄存器;S-BIT为移位寄 存器的最低位端;N指定移位寄存器的长度。每次使能输入 有效时,在每个扫描周期内,整个移位寄存器移动一位。所 以要用边沿跳变指令来控制使能端的状态,不然该指令就失 去了应用的意义。
7.1 传送、移位和填充指令
• (1)传送字节立即读指令 • 指令格式:LAD及STL格式如图7-1(c)所示。 • 功能描述:立即读取单字节物理区数据IN,并传送到OUT所 指的字节存储单元。该指令用于对输入信号的立即响应。 • 操作数:输入为IB,输出为字节。 • (2)传送字节立即写指令 • 指令格式:LAD及STL格式如图7-1(d)所示。 • 功能描述:立即将IN单元的字节数据写到OUT所指的字节存 储单元的物理区及映像区,它用于把计算出的Q结果立即输 出到负载。 • 数据类型:输入为字节,输出为QB。
第七章 S7-200PLC的功能指令
• 培训要求 • 了解功能指令在PLC中的主要应用;理解表功能、替换、高速计数器、 高速脉冲输出和PID回路指令的使用方法;掌握S7-200PLC的传送、移 位、填充、运算和数学指令;掌握S7-200PLC的字符串、时钟指令。 • 主要内容 • 7.1 传送、移位和填充指令 • 7.2 运算和数学指令 • 7.3 表功能指令 • 7.4 转换指令 • 7.5 字符串指令 • 7.6 时钟指令 • 7.7 中断 • 7.8 高速计数器指令 • 7.9 高速脉冲输出指令 • 7.10 PID回路指令
7.1 传送、移位和填充指令
移位次数 0 1 2 3 I0.5值 单元内容 1 1 0 0 10110101 10101011 10110110 10101100 位SM1.1 说明 X 1 0 1
移位前,移位时从VB20.4移出
1移入SM1.1,I0.5的值进入 右端 0移入SM1.1,I0.5的值进入 右端 1移入SM1.1,I0.5的值进入 右端
7.1 传送、移位和填充指令
• (2)循环左移指令 • 指令格式:LAD及STL格式如图7-2(d)所示。图中□处可为B、 W、DW(LAD)或D(STL)。 • 功能描述:把字节型(字型或双字型)输入数据IN循环左移 N位后,再将结果输出到OUT所指的字节(字或双字)存储 单元。实际移位次数为系统设定值取以8(16或32)为底的 模所得的结果。 • 数据类型:输入输出均为字节(字或双字),N为字节型数 据。 • 例7-3 循环移位指令举例。 • LD I0.0 • RRW VW0,3 • 例题中若VW0中的内容为1011010100110011,则执行 RRW指令后,VW0中的内容变为0111011010100110。
7.1 传送、移位和填充指令
• (7)使能信号 有些功能指令需要的是使能信号的上升沿, 若使能信号不是一个扫描周期的脉冲信号,则可能会产生意 想不到的结果。所以在使用功能指令时,要注意对输入使能 信号的处理,这一点非常重要。 • 7.1 传送、移位和填充指令 • 此类指令用来完成对数据的非数值运算操作,主要包括传送、 移位、字节交换、循环移位和填充等指令。 • 7.1.1 传送类指令 • 该类指令用来完成各存储单元之间进行一个或者多个数据的 传送。可分为单一传送指令和块传送指令。 • 1. 单一传送(Move) • 单一传送包括字节传送、字传送和双字传送。 • 指令格式:LAD和STL格式如图7-1(a)所示。图中的□处 可为B、W、DW(LAD)、D(STL)或R。