PCS7-motor电机
PCS7引脚CFC块说明(工程师培训)
MONITOR:激活监视反馈功能
TIM_MON:监视时间
LOCK:联锁关马达(界别最高)
LOCK_ON:联锁开马达
QMON_ERR:马达监视故障输出
QRUN:马达正在运行
QSTOP:马达停止状态
QSTART:控制输出(连接ቤተ መጻሕፍቲ ባይዱO)
QMAN_AUT:马达手自动状态
驱动块:
I:输入值
QBAD:通道的诊断。等于1表示通道故障
VALUE:输出通道地址
QUALITY:过程值的质量代码
SIM_ON:等于1时激活仿真功能
SIM_V:仿真值
QBAD:通道的诊断。等于1表示通道故障
VALUE:输出通道的地址
QUALITY:过程值的质量代码
F-System
1. F_1oo2AI
DELTA:如IN x的差异在所设的范围之内,则判定两个输入都是正确的
V:输出值
QUALITY:过程值的质量代码
2
MODE:系统生成,表示信号/通道类型。用户不修改。
U:输入值
UHRANGE:量程上限
ULRANGE:量程下限
QBAD:通道的诊断。等于1表示通道故障
VALUE:输出通道地址
QUALITY:过程值的质量代码
3
MODE:系统生成,表示信号/通道类型。用户不修改。
SPEXON_L:程序里选择SP内给定/外给定的开关
SPEXTSEL_OP:操作员选择SP内给定/外给定的开关
SP_OP:操作员输入的设定值
LIOP_MAN_SEL:决定是程序还是操作员具有选择手动/自动的权限
AUT_L:程序里选择手动/自动的开关
AUT_ON_OP:操作员选择手动/自动的开关
PCS7功能块详细说明
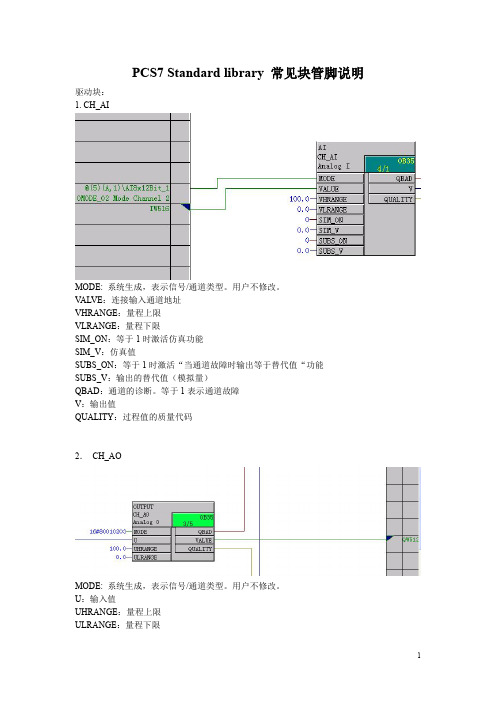
PCS7Standard library常见块管脚说明驱动块:1.CH_AIMODE:系统生成,表示信号/通道类型。
用户不修改。
VALVE:连接输入通道地址VHRANGE:量程上限VLRANGE:量程下限SIM_ON:等于1时激活仿真功能SIM_V:仿真值SUBS_ON:等于1时激活“当通道故障时输出等于替代值“功能SUBS_V:输出的替代值(模拟量)QBAD:通道的诊断。
等于1表示通道故障V:输出值QUALITY:过程值的质量代码2.CH_AOMODE:系统生成,表示信号/通道类型。
用户不修改。
U:输入值UHRANGE:量程上限ULRANGE:量程下限VALUE:输出通道地址QUALITY:过程值的质量代码3.CH_DIMODE:系统生成,表示信号/通道类型。
用户不修改。
VALVE:连接输入通道地址SIM_ON:等于1时激活仿真功能SIM_V:仿真值SUBS_ON:等于1时激活“当通道故障时输出等于替代值“功能SUBS_V:输出的替代值(模拟量)QBAD:通道的诊断。
等于1表示通道故障Q:输出值QUALITY:过程值的质量代码4.CH_DOMODE:系统生成,表示信号/通道类型。
用户不修改。
I:输入值VALUE:输出通道地址QUALITY:过程值的质量代码SIM_ON:等于1时激活仿真功能SIM_V:仿真值QBAD:通道的诊断。
等于1表示通道故障VALUE:输出通道的地址QUALITY:过程值的质量代码控制块:1.模拟量监视MEAS_MONCSF:控制系统故障。
连接通道的QBAD引脚U:过程值输入(PV)QC_U:过程值的质量代码U_AH:报警高高限U_WH:报警高限U_WL:报警低限U_AL:报警低低限HYS:偏差QH_ALM:高高报警输出(红色报警)QL_ALM:低低报警输出(红色报警)QH_WRN:高报警输出(黄色报警)QL_WRN:低报警输出(黄色报警)2.数字量监视:DIG_MONI:过程值QC_I:过程值的质量代码CSF:控制系统故障。
PCS7系统描述_Smart

1系统配置技术概述及系统规格1.1PCS 7控制系统简介西门子公司PCS7过程控制系统是集DCS、SIS、PLC 以及远程IO为一体的新型全集成自动化控制系统。
具有分散控制、集中管理、控制装置和现场仪表全数字化、安装方便成本低和维护管理智能化等特点。
它代表了当今控制系统的发展方向。
我们根据标书的要求,采用西门子全集成过程控制系统PCS7、PROFIBUS DP现场总线、远程IO等组成先进的全集成、全数字化系统。
1.1.1.1控制系统的主要特点采用SIMATIC PCS 7的全集成自动化SIMATIC PCS 7过程控制系统是全集成自动化(TIA)的核心部件,为生产、过程和综合工业中所有领域实现统一的、符合客户要求的自动化,提供了独特的平台。
通过全集成自动化(TIA)理念,西门子为所有过程自动化应用在一个单一平台上提供了统一的自动化技术,从输入物流,包括生产流程或主要流程以及下游流程,直到输出物流。
由此促进了整个公司运作的优化,包括企业资源规划(ERP)级、制造执行系统(MES)级、过程控制级直到现场级。
SIMATIC PCS 7 不仅可以集成在生产现场的整个自动化解决方案中,实现主要过程的自动化,而且还可以通过基于PLC 或PC 的SIMATIC 部件,实现生产现场的辅助流程(例如罐装、包装)或输入/ 输出物流(例如原材料分配、贮存)的自动化。
全集成自动化的优点不仅在设计和工程阶段,而且在装配和调试阶段以及操作和维护阶段都表现不俗,尤其是统一的数据管理、通讯和组态。
统一的数据管理意味着所有软件组件都可访问一个公共数据库。
因此,在一个项目中,输入和修改在一点即可完成。
从而降低了工作量,避免了潜在的错误。
导入符号识别后,就可用于每个软件组件。
即使同时有几位技术人员操作同一项目,亦能确保数据的一致性。
在工程师站定义的参数也可传送到现场中的传感器、执行机构或驱动器。
从公司管理层直到现场层的统一通讯基于国际标准,例如工业以太网或PROFIBUS,并支持经由因特网的全球化信息流。
pcs7电机块电流值报警

电机阀门常见应用之一:
在电机的操作面板上显示电机的电流值?可以实现过流报警功能吗?
APL 操作功能块(如电机类,阀类)都支持模拟量的面板显示。
电机块MotL(FB1850)可以在操作面板上显示3个模拟量值,例如,用作电机状态监控的电机电流、电机温度值等。
可以为其中的一个模拟量配置相应的限值报警,该限值报警将作为电机报警记录在报警系统中。
只需要将来自任何模拟量模块的有效的模拟量参数连接到以下3个参数中,即可实现面板上的模拟量显示。
如果要进行细节配置,参考以下步骤。
1:标准视图中的模拟量配置:
UserAna1和UserAna2是两个显示在操作面板模拟量值。
默认为隐藏参数。
首先将要显示的模拟量值连接到这两个参数上。
通过隐藏参数UA1unit和UA2unit配置显示的单位。
通过UserAna1/2的identifier属性配置需要显示的用户自定义文本,如“电流”、“温度”等。
2:AV面板中的模拟量显示
标准面板的两个模拟量显示值不支持报警。
如果要做报警,如限流报警、高温报警等,可以使用AV面板的模拟量显示。
该功能需要调用AV功能块(FB1903)
将需要显示的模拟量参数连接到AV块中,将AV块的输出AV_Tech送至电机的AV引脚。
在电机块的IO参数中配置具体的报警限值。
在AV块的Message属性中配置需要显示的报警信息。
PCS7系统的测试单元
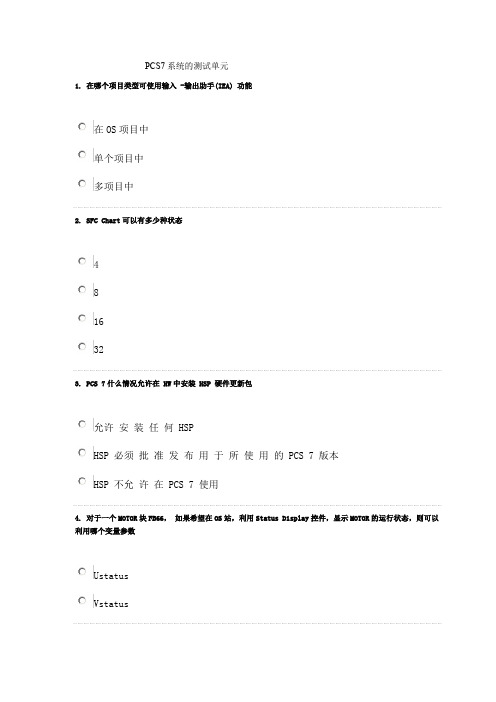
PCS7 系统的测试单元1. 在哪个项目类型可使用输入 -输出助手(IEA) 功能在 OS 项目中 单个项目中 多项目中2. SFC Chart 可以有多少种状态4 8 16 323. PCS 7 什么情况允许在 HW 中安装 HSP 硬件更新包允许 安 装 任 何 HSP HSP 必须 批 准 发 布 用 于 所 使 用 的 PCS 7 版本 HSP 不允 许 在 PCS 7 使用4. 对于一个 MOTOR 块 FB66, 如果希望在 OS 站,利用 Status Display 控件,显示 MOTOR 的运行状态,则可以 利用哪个变量参数Ustatus VstatusMSG_STAT QRUN QSTOP5. OS 上归档的设置应该遵循如下原则单个段不应该超过 1 周,所有段不能超过 6 个月 单个段不应超过 700M,所有段的个数不能超过 200 个 单个段无限制,所有段的个数不能超过 200 个 单个段无限制,所有段不能超过 6 个月 理论上无限制,仅受到硬盘空间大小的限制6. 如果希望把某些在 OS 操作员站设置的 PID 参数保存在用户程序中,则可以用下面哪些方法:Block - Upload CFC --- Readback7. 下列哪个属性表示此变量表示可以上传到 OSS7_m_c S7_trend S7_link S7_edit8. 在 PCS 7V71 中,使用 APL 库里的电机块 MotL,如果想通过就地信号来进行就地/远程切换,并且启停信号不仅过 DCS 而是直接通过 MCC 柜输出,那么 Localsetting 管脚的值应该设置为0 1 2 3 49. 一个 SFC Chart 最多可以有多少个 Sequencer4 8 12 1610. 根据 SFC 的运行状态逻辑,即 SFC OSL,一个 SFC 图在从 Held 状态恢复到 Run 状态,首先要经过哪个状态Holding Held Resuming Starting Completing11. 对于一个 MOTOR 块 FB66, 有很多变量影响 Motor 块的输出控制信号 QSTART,请问下列哪个变量优先级最 高LOCK=1 MSS_OFF=1 LOCK_ON=1 FAULT_OFF=112. CH_XX 块的 Quality 变量表示此通道的状态,下列哪个值表示此通道在仿真状态16#80 16#60 16#44 16#48 16#0013. PCS 7 哪个版本以上可以支持通过 CFC 连线,而不需要额外编程进行 AS-AS 通信PCS 7 V60 PCS 7 V61 PCS 7 V70 PCS 7 V7114. SIMATIC PCS 7 客户机/服务器架构具有最多()个 OS 服务器/服务器对,每个服务器统可有()个过程变 量,每个 OS 服务器/服务器对可拥有最多()个 OS 客户机。
西门子PCS7 Logic Matrix操作指南说明书
操作指南 02月2020年PCS7,Logic Matrix ,使用入门/CN/view/zh/109778800C o p y r i g h t S i e m e n s A G C o p y r i g h t y e a r A l l r i g h t s r e s e r v e d目录1PCS7 Logic Matrix 概述 ..................................................................................... 3 1.1 PCS7 Logic Matrix 概述 (3)2本例的联锁功能介绍 ............................................................................................ 4 2.1本例的联锁功能介绍 (4)3新建Logic Matrix................................................................................................ 5 3.1 新建项目并创建所需的过程标签 ........................................................... 5 3.2 新建Logic Matrix .................................................................................. 6 3.3编辑Logic Matrix 属性 (7)4 组态Logic Matrix................................................................................................ 8 4.1 直接链接“Direct connection” ................................................................. 8 4.2 选择输入/输出变量 “Select Input/Output tag” .................................... 13 4.2.1 增加links ............................................................................................ 13 4.2.2 选择输入/输出变量 .............................................................................. 14 4.2.3 增加更多links ..................................................................................... 16 4.2.4 增加更多原因(Cause )/结果(Effect ) ........................................... 18 4.3组 态Logic Matrix 矩阵交叉点(Intersection ) (20)5 生成 CFCs ......................................................................................................... 21 6操作员站进行Logic Matrix 测试与操作 (22)C o p y r i g h t S i e m e n s A G C o p y r i g h t y e a r A l l r i g h t s r e s e r v e d1PCS7 Logic Matrix 概述1.1PCS7 Logic Matrix 概述PCS7 Logic Matrix 是一个创建和监控逻辑矩阵的工具。
PCS7深入浅出(第九章)
PCS7深⼊浅出(第九章)第9章:过程标签类型、模型主数据库和过程对象视图⽬录:第9章过程标签类型、模型,主数据库和过程对象视图 (3)第9章过程标签类型、模型,主数据库和过程对象视图 (3)1.简介 (3)2.标签类型或者模型 (3)3.标签类型和标签 (4)3.1 马达类型图 (4)3.2 创建标签类型 (5)3.3 分配标签类型的数据⽂件 (8)3.4 IEA编辑器内的标签数据⽂件 (10)3.5 分配导⼊⽂件 (13)3.6 标签的外部编辑 (15)4.模型和拷贝 (16)4.1 创建模型 (16)4.2 拷贝 (20)5.主数据库 (21)5.1 PCS7库的操作 (21)5.2 项⽬的块 (21)5.3 其它库 (21)5.4 库的操作 (22)5.5 使⽤主数据库更新功能块 (22)6.过程对象视图 (23)6.1 过程对象视图的General标签页 (24)6.2 参数标签页 (24)6.3 Siganal标签页 (25)6.4 Message标签页 (27)6.5 Picture object标签页 (28)6.6 Archive标签页 (28)6.7 在过程对象视图中的操作 (30)6.7.1 拆分窗⼝视图 (30)6.7.2 过滤器 (30)6.7.3 查找/替换 (31)6.7.4 定义列 (32)6.7.5 取消 (32)6.7.6 为导出和导⼊选择连接和消息 (33)6.7.7 导出/导⼊过程对象 (37)6.7.8 过程对象视图中的测试模式 (39)练习 (42)练习 (42)练习 9.1 阀门控制标签类型 (42)1. 任务 (42)2. 指南 (42)第9章过程标签类型、模型,主数据库和过程对象视图1.简介如果在应⽤程序中⽤到⼀个特定类型的电机控制,并且在控制过程中频繁使⽤多种变体,您可以为这种电机控制建⽴⼀个类型或者模型,然后同变体⼀起有效地应⽤于程序中。
类型或者模型就象是⼀个模板,可以⽅便地复制各种变体。
PCS7——精选推荐

PCS7要点1、OS服务器跟AS站在NetPro中建立连接时,即建立S7_connection类型连接,OS服务器最好以CP1613等工业网卡与AS的CP431连接。
如果以OS服务器主板集成的网卡eth 与AS的CP431连接,则需要额外的SIEMENS soft License 。
实际上,soft License的价格比一张CP1613价格还要贵。
OS服务器主板集成的网卡eth更适合与终端总线相连。
2、PCS7用软件仿真时(仿真CPU),只能仿真MAC地址,不能使用IP地址,顾AS和OS通信只能用MAC/ISO协议通信,编译OS时,要选择对应的网卡,不要用默认的S7_Connection3、CFC中的每个RUNGROUPB不得超过50个块,否则会编译出错,需要手动调整5带背景DB的SFCHOLDING 过程,M,MAN_OP,均为布尔量2) 初始化RESUMING 过程一、首先,对于任何分度号热电偶(Thermocouple)测温,都要注意冷端温度补偿问题。
例如:SM331 AI8xTC(6ES7 331-7PF11-0AB0)模块提供了“内/外”两种冷端温度补偿方式,供用户选择。
二、其次,关于“VHRANGE”和“VLRANGE”端口量程设置,必需要先明确热电偶(Thermocouple)测温传感器的实际量程而定。
举例如下:1、如果S分度号传感器量程:Range=0~1600℃,则VHRANGE=1.6、VLRANGE=0.0;2、如果K分度号传感器量程:Range=0~1000℃,则VHRANGE=1.0、VLRANGE=0.0;3、如果K分度号传感器量程:Range=0~850℃,则VHRANGE=0.85、VLRANGE=0.0。
2024年PCS7培训教材教程
PCS7培训教材教程一、引言随着工业4.0的兴起,工业自动化控制系统在我国得到了广泛应用,其中西门子PCS7系统凭借其强大的功能和稳定性,在工业控制领域占据重要地位。
为了帮助广大工程技术人员更好地掌握PCS7系统的使用方法,本教程将详细讲解PCS7系统的基本原理、配置方法、编程技巧和故障处理等内容。
通过本教程的学习,读者将能够熟练运用PCS7系统进行工业自动化控制系统的设计和实施。
二、PCS7系统概述1.PCS7系统简介(1)高度集成:PCS7系统将过程控制、离散控制、驱动控制、批量控制等功能集成在一个统一的平台上,实现了各子系统之间的无缝连接。
(2)开放性:PCS7系统支持多种现场总线协议,如Profibus、Profinet等,便于与第三方设备进行集成。
(3)易于扩展:PCS7系统采用模块化设计,可根据项目需求进行灵活扩展。
(4)高效稳定:PCS7系统采用高性能的硬件平台和优化的软件算法,保证了系统的稳定性和高效性。
2.PCS7系统组成(1)工程师站(EngineeringStation):用于系统配置、编程和维护。
(2)操作员站(OperatorStation):用于实时监控和控制生产过程。
(3)控制器(Controller):用于执行控制策略,如SIMATICS7-400、SIMATICS7-1500等。
(4)现场仪表和执行器:用于实时采集现场数据和执行控制指令。
三、PCS7系统配置与编程1.系统配置(1)硬件配置:根据项目需求,选择合适的控制器、I/O模块、通讯模块等硬件设备。
(2)软件配置:安装PCS7软件,并进行系统授权和更新。
(3)网络配置:配置工程师站、操作员站与控制器之间的网络连接。
2.编程(1)CFC编程:采用连续功能图(CFC)编程方式,实现控制策略的快速搭建。
(2)SFC编程:采用顺序功能图(SFC)编程方式,实现复杂控制逻辑的编写。
(3)GRAPH编程:采用GRAPH编程方式,实现批量控制过程的编写。
完整版PCS7MOTOR块使用总结

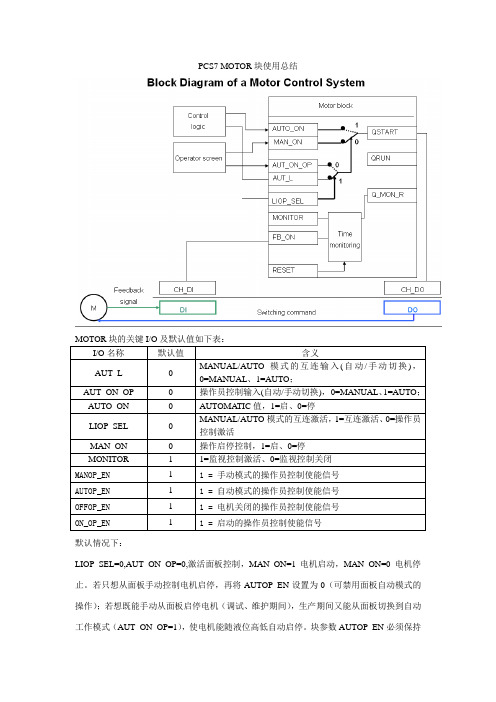
PCS7 MOTOR块使用总结Block Diagram of a Motor Control SystemI/O名称默认值含义AUT_L0MANUAL/AUTO 模式的互连输入(自动/手动切换),0=MANUAL 、1=AUTO ;AUT ON OP0操作员控制输入(自动/手动切换),0=MANUAL、仁AUTO ;AUTO ON0AUTOMA TIC 值,仁启、0=停LIOP_SELMANUAL/AUTO 模式的互连激活,1 =互连激活、0=操作员控制激活MAN ON0操作启停控制,仁启、0=停MONITOR1仁监视控制激活、0=监视控制关闭MANOP EN1 1 =手动模式的操作员控制使能信号AUTOP EN1 1 =自动模式的操作员控制使能信号OFFOP EN1 1 =电机关闭的操作员控制使能信号ON OP EN1 1 =启动的操作员控制使能信号LIOP_SEL=0,AUT_ON_OP=0,激活面板控制,MAN_ON=1 电机启动,MAN_ON=0 电机停止。
若只想从面板手动控制电机启停,再将AUTOP_EN设置为0 (可禁用面板自动模式的操作);若想既能手动从面板启停电机(调试、维护期间),生产期间又能从面板切换到自动工作模式(AUT_ON_OP=1),使电机能随液位高低自动启停。
块参数AUTOP_EN必须保持为1, 且将液位高启(停)电机、液位低停(启)电机的逻辑程序连接于电机的AUTO_ON 端。
图标中的电机应修改成泵,手动、自动状态显示不用修改;若想电机既能在面板手动控制,也能在现场控制箱上启停控制,且由现场控制箱上的开头决定那儿启停有效。
将LIOP_SEL 参数设置为1,将AUT_L 连接于C/L 选择开头,将AUTO_ON 连接于现场的启停信号。
此种结构需要将块图标中的A/M 模式显示改为LOCAL/CENTRE, 且在块实例属性事将AUTO_ON_OP 0 、1对应的文本改为集控/就地。
PCS7的CFC块引脚说明
一、双向阀门(液压或汽动)输入管脚说明:1、EN:BOOL,功能块使能端。
2、L_SS_ACT:BOOL,安全位置连锁驱动。
3、L_OPEN_ACT:BOOL,开阀连锁驱动。
4、L_CLOSE_ACT:BOOL,关阀连锁驱动。
5、L_HOLD:BOOL,保持连锁开关,为1时状态保持。
6、L_OPEN_COND:BOOL,开阀连锁条件。
7、L_CLOSE_COND:BOOL,关阀连锁条件。
8、L_RESET:BOOL,报警复位。
9、CSF:BOOL,控制系统故障,为1时表示外部错误。
10、SS_POS:BOOL,安全位置,1为开到位,0为关到位。
与L_SS_ACT结合使用。
11、LOCAL:BOOL,机旁操作。
12、QC_LOCAL:BYTE,机旁信号点质量。
13、REMOTE:BOOL,远程操作。
14、QC_REMOTE:BYTE,远程信号点质量。
15、HMI_T_EN:HMI测试模式使能端。
16、HMI_TEST:HMI测试模式,当HMI_T_EN为1时有效。
17、HMI_MANUAL:HMI手动模式。
18、HMI_AUTO:HMI自动模式。
19、POWER:BOOL,控制电源合闸信号。
20、QC_POWER:BYTE,控制电源合闸信号点质量。
21、FB_OLS:BOOL,开到位。
22、QC_FB_OLS:BYTE,开到位信号点质量。
23、FB_CLS:关到位。
24、QC_FB_OLS:关到位信号点质量。
25、QC_QOPEN_INS_I:BYTE,开阀指令品质代码输入。
26、QC_QCLEN_INS_I:BYTE,关阀指令品质代码输入。
27、OP_OPEN:BOOL,机旁箱开阀按钮,当LOCAL为1且POWER为1时,如该管脚为1,则有开阀指令。
该功能仅限于机旁进PLC的情况。
28、OP_CLSE:BOOL,机旁箱关阀按钮,当LOCAL为1且POWER为1时,如该管脚为1,则有关阀指令。
该功能仅限于机旁进PLC的情况。
PCS7_V71的新特点
AS 1Biblioteka AS 2AS nnew
PDM V7.0 as server
▪ On all MSC’s all maintenance information available.
▪ Some restrictions for ES/PDM
page 18
I/O
AS – Automation System
MC – Multi Client
s
Topics
过程自动化的趋势 PCS 7 V7.1的新特点 高级过程库
PCS 7 V7.1 - 高级过程库 亮点
使用的经验
▪ 适合所有行业和地区
易于使用
▪ 符合人体工程学的符号和面板 ▪ 统一的状态信息 ▪ 统一的操作模式(自动,开,手动,服务) ▪ 灵活的连锁功能 ▪ 笔记事件查阅功能
适应和可扩展功能
▪ 特征参数 如本地模式 ▪ 模块化的功能,例如监视辅助变量
信号状态结构变量 集成资产管理
集成仿真功能 集成的高级过程控制
page 24
高级过程库 信号状态
新技术特点: 使用包含过程值和状态的结构变量 状态符合PROFIBUS & PROFINET国际组织的PA行规
ChannelFunctionBlock
客户的优势:
➢ 简单的配置 ➢ 改进的安全机制
page 10
OS Server Web-Viewer
OpenPCS 7 -附加的系统配置
新技术特点:
OpenPCS7运行在OS Client,OS Server and CAS
Engineering System
OS Client
New
OPC Clients
page 32
(完整版)PCS7MOTOR块使用总结
PCS7 MOTOR块使用总结I/O名称默认值含义AUT_L 0 MANUAL/AUTO模式的互连输入(自动/手动切换),0=MANUAL、1=AUTO;AUT_ON_OP 0 操作员控制输入(自动/手动切换),0=MANUAL、1=AUTO;AUTO_ON 0 AUTOMA TIC值,1=启、0=停LIOP_SEL 0 MANUAL/AUTO模式的互连激活,1=互连激活、0=操作员控制激活MAN_ON 0 操作启停控制,1=启、0=停MONITOR 1 1=监视控制激活、0=监视控制关闭MANOP_EN 1 1 = 手动模式的操作员控制使能信号AUTOP_EN 1 1 = 自动模式的操作员控制使能信号OFFOP_EN 1 1 = 电机关闭的操作员控制使能信号ON_OP_EN 1 1 = 启动的操作员控制使能信号默认情况下:LIOP_SEL=0,AUT_ON_OP=0,激活面板控制,MAN_ON=1电机启动,MAN_ON=0电机停止。
若只想从面板手动控制电机启停,再将AUTOP_EN设置为0(可禁用面板自动模式的操作);若想既能手动从面板启停电机(调试、维护期间),生产期间又能从面板切换到自动工作模式(AUT_ON_OP=1),使电机能随液位高低自动启停。
块参数AUTOP_EN必须保持为1,且将液位高启(停)电机、液位低停(启)电机的逻辑程序连接于电机的AUTO_ON 端。
图标中的电机应修改成泵,手动、自动状态显示不用修改;若想电机既能在面板手动控制,也能在现场控制箱上启停控制,且由现场控制箱上的开头决定那儿启停有效。
将LIOP_SEL参数设置为1,将AUT_L连接于C/L选择开头,将AUTO_ON连接于现场的启停信号。
此种结构需要将块图标中的A/M模式显示改为LOCAL/CENTRE,且在块实例属性事将AUTO_ON_OP 0、1对应的文本改为集控/就地。
(若是简单电机手动控制启停,可直接使用这些参数);若AUT_ON_OP=1则激活从AUTO_ON启停电机(使用CFC、SFC启停、逻辑程序启动电机)。
PCS7相关资料总结

图1 在“Permissions”一栏中可以将“Full Control”权限分配给所需要的用户。执行
-
99
-
2
表 03
AS PO 数的计算 在 AS 没有组态过程对象。 在 AS 中占用 0 个过程对象。
图. 04: AS 过程对象的授权信息 示例 2
OS PO 数的计算 手动创建的 25 个 OS 变量算作一个 PO,对于 OS 的所有变量中每 60 个变量算 作一个 PO。
1. 算法 35 个手动建立的变量 = 1 PO (整体计算)
从 PCS 7 V7.0 开始,如何计算 AS 和 OS 授权的 PO 个数? 描述: 在 PCS 7 中,对于 AS 和 OS 的过程对象授权是不同的。下表表述了过程对象 计算的不同方法。
序 描述 号. 1 AS 过程对象 (授权: "AS RT PO")
下面的每一个对象占用 1 个 "AS RT PO" 授权:
因为第一种算法结果超过了第二种算法结果,所以取第一个结果 11 个 PO。
图. 03: WinCC 过程对象的授权信息 示例 1
示例 2: 下面的块从"PCS 7 Library V71"库中得到。
数量 块
监控& 消息上传 OS 变量个数 AS PO OS PO
35 手动创建的过程变量
-
35
PCS7 PID-Tuner使用说明

PCS7 PID-Tuner使用说明目录描述: (3)要求: (3)注意: (4)步骤: (5)1,为控制器优化做准备 (5)2,启动PCS 7的PID整定器 (5)3,设置曲线记录参数 (6)4,启动控制器优化 (7)5,优化过程操作 (8)Step1.选择过程特性(是否存在积分环节) : (8)Step2.选择操作模式(手动/自动),输入实现阶跃仿真的起始点: (8)Step3.设定目标点: (9)Step4.数据收集: (10)Step5.复位: (10)Step6.控制器设计: (11)Step7.选择控制器的类型和参数: (12)Step8.使用优化参数仿真: (14)Step9.应用参数: (16)描述:从PCS 7 V5.1开始,可以使用调试工具“PCS 7 PID Tuner”来优化控制器。
这个工具可以通过测量方式识别控制对象参数并给出优化参数的设置建议。
如果用户需要,可以立刻使用这些参数。
从PCS7 V7.1开始,可以优化“PCS 7 Library”和“PCS 7 Advanced Process Library”中的控制器,以及有类似功能的控制器。
同样也可以调整步进控制器的马达启动时间。
要求:1,PCS 7的PID整定器软件安装在工程师站上。
在正常PCS 7的工程师站安装中就可以安装此工具。
2,安装相应授权。
从PCS 7 V7.1开始,不再需要额外的PCS 7 PID整定器授权。
(免费)3,CFC已经编译并下载到PLC中。
4,ES和PLC之间有在线连接。
5,对于控制回路需要了解以下几方面:5.1控制对象的过程特性(是否存在积分环节)5.2控制回路状态(手动或者自动)5.3控制器的阶跃工作点5.4控制器类型(比例积分微分,比例积分或者比例控制器)说明:1,以下以连续型的比例积分控制器为例解释如何使用PCS 7的PID整定器。
2,更多信息可以参考对应的readme文件和PCS 7的PID 整定器的在线帮助文件。
佳能复印机-维修手册(双面单元-A1)中文版

荣 将会以维修信息公告的方式进行交流。
所有维修人员均应对本维修手册以及所有相关的维修信息公告板的内容进行深入的理
共享光 解和掌握,并且具有对设备故障进行识别、分析的能力。
共享光荣
目录
目录
第 1 章规格 1.1 产品规格 ................................................................. 1-1
4.1.2 消耗品 ............................................................... 4-1 4.1.2.1 消耗品 ........................................................... 4-1
介绍
所使用的符号
本文件使用下列符号表示专用信息。
符号 说明
表示非特定性质的项目,可能被列为 “注意” . “小心” . “警告”
表示需要小心以防止电击项目
表示需要小心以防止燃烧 (火灾)项目 表示禁止分解以防止电击或者电路问题的项目 表示需要从电源出口切断电源插座的项目
荣 表示旨在提供注意事项协助理解讨论中主题的项目
5.2.1 卡纸代码清单 ......................................................... 5-1
西门子伺服电机简明样本2013
西门子提供免费的、功能强大的产品图纸工具软件 CAD-Creator。通过 CAD-Creator 软件可以生成电机及驱动、控制系统的 2 维尺寸 图和 3 维立体示意图。 下载网址 :/download/searchResult.aspx?searchText=cad+creator
依靠完善的产品规格体系、创新的模块化设计和上述的丰富可选项,您可以根据实际使用的需求,选择到犹如定制化的最适合电机 产品。您还可以借助西门子选型工具 Sizer 和图纸工具 CAD-Creator 来进行辅助选择,上述软件均免费使用。
请注意 :并非所电机都覆盖所有上文所述可选项。具体的使用需求可咨询西门子当地销售工程师或使用西门子标准选型大全(PM 21) 来进行更精确的选择。
10.0 15.0 18.0 3.7 5.4 8.0 6.5 6.5 2.6 3.0 4.3 5.0 0.9 2.0
15.0 4.7 6.0 8.7 10.0 1.5
堵转 转矩
M0 Nm
3.0 6.0 8.5 11.0 12.0 16.0 20.0 18.0 27.0 36.0 48.0 3.0 6.0 8.5 11.0 8.0 12.0 16.0 20.0 18.0 27.0 36.0 48.0 6.0 8.5 11.0 8.0 12.0 16.0 0.18 0.35 0.85 1.15 1.6 1.6 3.0
PCS-9627D_X_说明书 R2.30

i
PCS-9627D 电动机保护装置
警示! 接地 装置的接地端子必须可靠接地。 运行环境 该装置只允许运行在技术参数所规定的大气环境中,而且运行环境不能存在不正常的震动。 额定值 在接入交流电压电流回路或直流电源回路时,请确认它们符合装置的额定参数。 印刷电路板 在装置带电时,不允许插入或拔出印刷电路板,否则可能导致装置不正确动作。 外部回路
我们定期仔细检查本文档中的内容,在后续版本中会有必要的修正。 资料相关,请联系: 但不可避免会有一些错误之处,欢迎提出改进的意见。 电话:025-87178185、传真:025-8718208 我们保留在不事先通知的情况下进行技术改进的权利。 电子信箱:nr_techsupport@ 南京南瑞继保电气有限公司 公司地址:中国南京江宁区苏源大道 69 号 邮编 211102 公司网址:
PCS-9627D 电动机保护装置
技术和使用说明书
PCS-9627D 电动机保护装置
前言 使用产品前,请仔细阅读本章节!
本章叙述了使用产品前的安全预防建议。在安装和使用时,本章内容必须全部阅读且充分理解。 忽略说明书中相关警示说明,因不当操作造成的任何损害,本公司不承担相应责任。 在对本装置做任何操作前,相关专业人员必须仔细阅读本说明书,熟悉操作相关内容。 操作指导及警告 本手册中将会用到以下指示标记和标准定义: 危险! 意味着如果安全预防措施被忽视,则会导致人员死亡,严重的人身伤害,或
ii
南京南瑞继保电气有限公司
PCS-9627D 电动机保护装置
目录
前言.........................................................................................
PCS7综合实验演练第四部分

PCS7实验(4)实验16 VXC1.程序组Simatic—step7—VXC—Compare Versions。
在菜单上选取open,如下图所示。
23412.点击工具栏上的compare with……选中需要比较的CFC,如下图所示。
结果如下图所示。
红色表示两个CFC不一致的地方。
实验17 两个小顺控器在PCS7 7.0中,SFC如果停了,可以从刚才停止的地方执行,但6.0就要从头开始执行。
如果在加原料的时候阀在漏,那主顺控器就要停止,把所有设备停掉,等修好后再执行,但每次已经加入的原料就浪费,所以用DB块存起来。
Holding sequencer:挂起的时候把所有设备状态放到DB块中,再把设备关闭。
Resuming sequencer:恢复的时候把DB块中的数据恢复回来。
1.在Component View的blocks文件夹下创建DB1(DB61后的由系统使用)阀的状态 V1:BOOL; V2:BOOL;V3:BOOL;电机状态 M1:BOOL;加热阀手动自动 A_H:BOOL;手操值 MAN_OP:REAL;2.打开Reac_SFC(1)插入小顺控器Holding,如下图所示。
对标签按鼠标右键,选择insert sequence at end。
更名为Holding。
对Holding双击,填入start condition。
如下图所示。
在该小顺控器中双击START,分别填写Initialization和Termination选项卡中的语句。
Initialization:DB1.V1=Reactor.FB_V1_OPDB1.V2=Reactor.FB_V2_OPDB1.V3=Reactor.FB_V3_OPDB1.M1= Reactor.MOTOR_ON_OFFDB1.A_H= TICA1.AUT_ON_OPDB1.MAN_OP= TICA1.MAN_OP关阀:V1.LIOP_SEL=1;V1.AUT_L=1;V1.AUTO_OC=0;V2.LIOP_SEL=1;V2.AUT_L=1;V2.AUTO_OC=0;V3.LIOP_SEL=1;V3.AUT_L=1;V3.AUTO_OC=0;关电机:M1.LIOP_SEL=1;M1.AUT_L=1;M1.AUTO_ON=0;关加热阀:TICA1.AUT_ON_OP=Manual;TICA1.MAN_OP=0.0。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
PCS 7 V7.1 SP1中,APL库MotL功能块主要用于控制单向启停电机,可以实现电机的手动控制、自动控制、就地控制等;控制命令可以为单点的高低电平启停也可以为双点的脉冲控制启停;电机启动或运行过程中可以实行安全的连锁保护控制等。
其中MotL块的4种操作模式:就地模式、自动模式、手动模式、停止服务模式介绍如下。
❑就地模式:此操作模式下,电机可通过位于“就地”的控制箱进行就地启停控制。
❑自动模式:此操作模式下,电机由程序功能块的输出来自动控制。
❑手动模式:此操作模式下,电机由操作员通过上位机面板手动控制。
❑停止运行:“停止运行”操作模式适用于所有带操作模式切换的功能块。
该操作模式适用于维护和维修阶段(例如,更换设备)。
进入此模式后,功能块将被禁用,上位机面板、程序自动控制命令等都不能控制电机。
此外现场的故障信号也不会生成任何报警消息。
在此操作模式下,电机和阀的所有输出均设置到安全位置。
(电机的安全位置始终是电机停止)以下是4种模式之间的切换关系,从图中看出除停止运行模式外,其他各种模式之间可以进行相互的切换。
“停止运行“模式只能从“手动”模式下向其进行过渡。
图2操作模式的切换下文将通过具体的章节详细介绍上述各功能的应用。
3MotL块的基本使用3.1 MotL块调用及基本管脚介绍MotL功能块编号为FB1850,通过CFC进行调用,安装在循环中断OB中(OB30~OB38)中。
如图,在PCS 7 AP Library V71/Drivers里找到MotL然后拖入相应CFC中即可。
图3 调用MotL功能块基本管脚如下图,更详细的内容可以参见在线帮助。
其中FbkRun管脚连接的是现场电机启动反馈信号,Start连接的是单点高低电平型电机启动输出信号,该两管脚为最基本的信号输入和输出管脚。
图4MotL电机块管脚3.2如何通过操作员面板启/停电机在CFC中调用该功能块后,对相应的基本管脚进行连接即可完成电机的基本控制功能。
MotL中与基本控制功能相关的管脚有:注:如果希望使用双点脉冲输出型控制信号,请参考下述5.1章节的内容。
图5操作员面板启/停电机的CFC连接可以启动/停止电机。
图6操作员界面手动操作启停点击表3LocalSetting设置注:LocalSetting管脚默认是不可见的。
此外,模式切换时,只能从手动和自动操作模式切换到就地模式。
3.3.1就地模式Localsetting=1就地模式LocalSetting = 1,控制信号(远程/就地模式切换信号Remote,就地启停信号Off/On)来自现场,经过通道块连接到MotL的相应参数上。
电机块经过通道块将启动信号传递到控制电机启停的控制室(MCC)。
电机的运行反馈通过连接参数FbkRun从控制室传送到电机块。
在这种就地模式下,DCS 面板不能操作,也不能切换到其他模式。
图7就地模式LocalSetting = 13.3.2就地模式LocalSetting=2就地模式LocalSetting = 2下,就地开关直接和MCC相连接直接启停电机。
就地模式切换信号连接到LocalLi管脚,此时DCS中的MotL块将基于FbkRun反馈来校正并跟踪现场电机状态。
输入信号StartLocal和StopLocal的控制在这种情况下不起作用。
在这种就地模式下,DCS面板不能操作,也不能切换到其他模式。
图8就地模式LocalSetting = 2注:可以借助输出参数LocalAct的硬接线连接到控制室,以确保MCC中只有在就地模式下才能从就地启停电机。
3.3.3就地模式LocalSetting=3就地模式LocalSetting = 3下,同LocalSetting = 1模式的控制方式。
不同的是就地模式的切换通过面板上执行,现场无就地切换信号。
地切换信号。
时,面板上的模式切换按钮和电机启停按钮为灰色不可操作。
图11CFC中通过程序互连启/停电机图12通过程序互连启/停电机的面板一些复杂的电机控制回路需要使用到连锁保护控制的功能,MotL功能块提供了最多三种类型的连锁,对应的管脚分别为Intlock、Protect和Permit,如图13。
图13连锁功能4.1.1启动使能(许可Permit)电机处于停止位置并准备启动时,如果启动条件允许(即输入Permit = 1),则允许启动电机;如果启动条件不允许(输入Permit = 0)则不能启动电机,此时如图13中“停止”右边的按钮为灰色。
该激活使能条件只针对电机处于停止位置时有效,即只在启动电机时进行连锁,如果电机已经启动起来,则不再校验该使能信号。
(即电机启动后,即使条件不允许,电机也不会停止)。
4.1.2不带复位的互锁(互锁Intlock)该类互锁条件用于连锁停止电机。
当互锁条件来时(输入Intlock = 0),电机将进入安全位置(电机停止)。
互锁条件消失后(输入Intlock = 1),如果电机处于自动或就地模式,而且启动信号存在(如StartAut=1),则电机将再次启动。
在手动模式下可再次操作面板启动电机。
该互锁和上述的许可条件最大的区别是,该条件不仅仅针对电机停止状态有效,在电机运行情况下也同样有效。
4.1.3带复位的互锁(保护Protect)该类互锁条件用于连锁停止电机。
当互锁条件来时(输入Protect = 0),电机将进入安全位置(电机停止)。
互锁条件消失后(输入Protect = 1),操作员需要通过点击面板中的复位按钮(仅在自动模式下)复位故障后,电机方可再次启动。
图14就地模式下禁用互锁功能注:上述的三种互锁信号有效情况下为1,连锁时为0,此外该功能通常会结合APL库下Interlock功能块一起使用(Interlck组下的Intlk02、Intlk04,Intlk08和Intlk16)。
关于Interlock功能块的使用,详见APL库的在线帮助。
此外,如果在就地模式和仿真模式下不希望使用该互锁功能,则可以通过输入参数BypProt = 1旁路互锁功能。
4.2 MotL的脱扣保护功能及快速停止功能4.2.1脱扣功能(Trip)用于电机过热保护停止电机(Trip = 0)。
如果电机由于脱扣功能停止运行,则OS上会生成一条消息(过程控制消息),并在面板中使用“脱扣”(Trip)文本加以指示。
如果电机此时处于自动模式下,则必须使用“复位”(Reset)按钮(或通过可互连输入参数RstLi = 1)复位脱扣。
手动模式下可不必复位。
此外,同互锁功能,在就地模式和仿真状态下可通过参数BypProt = 1屏蔽该功能。
图15脱扣功能图16脱扣消息4.2.2电机快速停止功能(Rapid Stop)在所有操作模式(手动、自动和就地模式)和操作状态(如强制状态)中,快速停止具有最高优先级。
该功能默认情况下为关闭状态,需要通过功能块的特性参数Feature位来设置(Feature管脚默认是隐藏的)。
双击Feature位将Bit14设置为1(如图17)则使能快速停止功能(画面可操作,如图18),使用RapidStp = 1输入参数发出进入快速停止状态的命令,也可以通过单击面板中的“快速停止”(Rapid Stop)按钮来停止电机。
快速停止后的电机如果需要重新启动,则必须手动通过复位按钮复位后方可再次启动。
图17电机快速停止功能CFC中设置图18电机快速停止功能画面中操作图19电机快速停止复位注:在就地模式Localsetting=2和Localsetting=4中,如果也希望实现面板的快速停止功能,则需要将输出参数R_StpAct = 1(快速停止激活)连接到实际的I/O中,以便通过硬件实现快速停止功能。
5 MotL块的扩展功能5.1控制脉冲输出电机MotL功能块提供两种类型的输出控制命令:单点高低电平型控制命令(Start)和双点脉冲型控制命令(P_Start和P_Stop)。
实际使用过程中根据具体应用情况选择不同的输出命令。
脉冲输出控制时,脉冲的宽度可以通过PulseWidth来设置,如图20所示。
图20脉冲输出注:其中P_Stop输出脉冲为反脉冲,即停止命令输出时,P_Stop将输出低电平脉冲信号(P_Stop=0),无信号输出时P_Stop保持高电平信号(P_Stop=1)。
5.2电机块的仿真操作仿真功能为APL功能块提供的标准功能,用于系统调试时在反馈信号等现场条件不具备的情况下正常输出控制命令。
如图6,可以在面板上点击参数按钮,切换到如图21画面,然后打开仿真功能,即可进行仿真操作。
图21打开仿真注:打开仿真功能需要当前登录的用户具有1100号权限(Highest process controlling)5.3 MotL块的辅助值及附加模拟量显示功能5.3.1附加辅助值显示附加辅助值显示功能用于在电机面板的标准视图中额外显示最多两个辅助变量,例如,可以指示电机电流或线圈温度等。
为此,需要将要显示的变量与输入参数UserAna1或UserAna2互连。
在CFC中的块的对象属性(I/O >标识符)中,可指定要在面板的标准视图中为这些参数显示的文本(标识符列),如图22。
只有连接该变量后,面板才会额外显示两个附加辅助值,否则为隐藏状态。
显示辅助变量的单位可以通过管脚UA1unit和UA2unit来指定,如图24,具体代码与变量的对应关系请参见在线帮助文档。
图22附加辅助值名称图23面板中显示附加辅助值图24单位代码修改注:辅助变量管脚UserAna1和UserAna2默认为隐藏状态,使用时需要将其显示出来。
此外该功能仅仅提供两个辅助变量的面板显示功能,不支持报警功能。
5.3.2附加模拟值的限值监视如果除对附加变量进行显示外,还需提供限幅报警的功能,则需要借助额外的AV功能块来实现。
如图25,从APL库的Monitor组中加入AV功能块,AV功能块的AV输入连接所需监视的变量,AV块的AV_Tech输出管脚和电机块的AV连接,AV块的AV_Out连接到电机块的UserAna1。
则此时MotL功能块的面板上会出现如图26的按钮,点击后弹出限值界面,即可对AV变量进行限幅设置。
图25CFC中连接AV图26AV面板注:AV变量的报警文本信息需要通过AV功能块来组态。
5.4MotL块的几个时间参数为了更好的对电机进行实时的监控和保护,MotL块增加了如下几个时间参数。
❑MonTiStatic=3用于设置电机启动后的静态监控时间,例如,电机运行中如果丢失了运行信号超过3秒,则报警并输出停止命令。
(该时间必须小于等于动态监控时间)❑MonTiDynamic=10用于设置电机启动时的动态监控时间,例如,点击电机运行后如果10秒内没有运行反馈,则报警并输出停止命令。