FLC design for bounded separable functions with linear input-output relations as a special
CFD松弛因子的解释之欧阳数创编
1、FLUENT 中关于松弛因子的解释由于流体力学中要求解非线性的方程,在求解过程中,控制变量的变化是很必要的,这就通过松弛因子来实现的。
它控制变量在每次迭代中的变化。
也就是说,变量的新值为原值加上变化量乘以松弛因子。
如:A1=A0+B*DETAA1 新值A0 原值B 松弛因子DETA 变化量松弛因子可控制收敛的速度和改善收敛的状况为1,相当于不用松弛因子大于1,为超松弛因子,加快收敛速度小于1,欠松弛因子,改善收敛的条件一般来讲,大家都是在收敛不好的时候,采用一个较小的欠松弛因子。
Fluent里面用的是欠松弛,主要防止两次迭代值相差太大引起发散。
松弛因子的值在0~1之间,越小表示两次迭代值之间变化越小,也就越稳定,但收敛也就越慢。
这个1e-3或者1e-4的收敛标准是相对而言的。
在FLUENT中残差是以开始5步的平均值为基准进行比较的。
如果初值取得好,迭代会很快收敛,但是残差却依然很高;但是当你改变初场到与基准相差很大的值时,残差开始会很大,但随后却可以很快降低到很低的水平。
其实两种情况下流场是基本相同的。
2、FLUENT 收敛判断由此来看,判断是否收敛并不是严格根据残差的走向而定的。
可以选定流场中具有特征意义的点,监测其速度,压力,温度等的变化情况。
如果变化很小,符合你的要求,即可认为是收敛了。
一般来说,压力的收敛相对比较慢一些的。
是否收敛不能简单看残差图,还有许多其他的重要标准,比如进出口流量差、压力系数波动等等。
尽管残差仍然维持在较高数值,但凭其他监测也可判断是否收敛。
最重要的就是是否符合物理事实或试验结论。
残差曲线是否满足只是一个表面的现象,还要看进口和出口总量差不得大于1%,而且即使这样子,收敛解也不一定准确,它和网格划分/离散化误差,以及物理模型的准确性都有关系。
所以需要试验数据来验证。
残差的大小不能决定是否收敛,用FLUENT计算时,一般多采用监测一个面的速度(或者是压力、紊动能等参数)基本上不随着计算时间的推移而变化,就认为基本达到收敛据质量守恒,收敛时进、出口的流量数值应大致相等(一般认为进出口质量差值比上入口质量的相对值小于0.5%时收敛,但是对特殊情况可能不同),但符号相反,一般出口流量是负值。
软件开发模型

喷泉模型喷泉模型fountain model是一种以用户需求为动力,以对象为驱动的模型,主要用于描述面向对象的软件开发过程。
喷泉模型是一种以用户需求为动力,以对象为驱动的模型,主要用于采用对象技术的软件开发项目。
该模型认为软件开发过程自下而上周期的各阶段是相互迭代和无间隙的特性。
软件的某个部分常常被重复工作多次,相关对象在每次迭代中随之加入渐进的软件成分。
无间隙指在各项活动之间无明显边界,如分析和设计活动之间没有明显的界限,由于对象概念的引入,表达分析、设计、实现等活动只用对象类和关系,从而可以较为容易地实现活动的迭代和无间隙,使其开发自然地包括复用。
喷泉模型不像瀑布模型那样,需要分析活动结束后才开始设计活动,设计活动结束后才开始编码活动。
该模型的各个阶段没有明显的界限,开发人员可以同步进行开发。
其优点是可以提高软件项目开发效率,节省开发时间,适应于面向对象的软件开发过程。
由于喷泉模型在各个开发阶段是重叠的,因此在开发过程中需要大量的开发人员,因此不利于项目的管理。
此外这种模型要求严格管理文档,使得审核的难度加大,尤其是面对可能随时加入各种信息、需求与资料的情况。
优点缺点1、喷泉模型的优点喷泉模型不像瀑布模型那样,需要分析活动结束后才开始设计活动,设计活动结束后才开始编码活动。
该模型的各个阶段没有明显的界限,开发人员可以同步进行开发。
其优点是可以提高软件项目开发效率,节省开发时间,适应于面向对象的软件开发过程。
2、喷泉模型的缺点由于喷泉模型在各个开发阶段是重叠的,因此在开发过程中需要大量的开发人员,因此不利于项目的管理。
此外这种模型要求严格管理文档,使得审核的难度加大,尤其是面对可能随时加入各种信息、需求与资料的情况。
瀑布模型(Waterfall Model)什么是瀑布模型?1970年温斯顿·罗伊斯(Winston Royce)提出了著名的“瀑布模型”,直到80年代早期,它一直是唯一被广泛采用的软件开发模型。
动网格经典集合
【让网格动起来】Fluent中动网格出现负体积,怎样处理? 最近在做一个三维旋转圆柱绕流算例,动网格这边一直有负体积出现,试了很多次 也没有解决,但同样的操作二维就可以实现,在预览三维动网格时迭代到一定时 间后最大单元畸变率就开始增大直到超过0.95,到出现负体积,这是什么原因造 成的呢,旋转的那块采用四面体结构,其畸变率小于0.83,还有一个就是三维四 面体的畸变率是不是多数在0.7以上呢?udf应该是没有问题,参数设臵也感觉没 有问题,现在不知原因错在哪?求老师指点。 /ap/bd/Q/qv/id/12036 间步长设臵要合适,建议修改时间步长和网格重建参数。 还要修改网格重建参数,网上有很多过于这个的分析,可以参考一下。 【让网格动起来】在Fluent中,并行编译UDF时,Primitive Error at Node 1: open_udf_library: 系统找不到指定的文件 是什么原因? (1)并行的UDF和单机的UDF不一样,不能用单机的UDF编译后的文件目录直接用 ,必须重新在并行情况下编译一次(会看到目录下多了两个文件夹); (2)修改libudf为绝对路径。 /ap/bd/Q/qv/id/12092
【让网格动起来】动态分层(layering)问题 您好,我在练习动网格,用的动态分层的方法,做的实例如下,让小方块向 右动起来。我将流场分了四个区域(小方块上部,小方块左部,小方块 右部,小方块下部)。上下区域的分界线采用的是interface。小方块左右 两边设定为刚体运动,上下两边设定为变形。四个interface设臵为变形。 采用的软件是fluent 6.3.26。layering的设定是拉伸0.4,合并0.2,希望高度 1m(图中网格每格为2m,物体运动速度1m/s) /ap/bd/Q/qv/id/12191 主要是interface没设臵好。你的整个流场还是在一个区域中。 【让网格动起来】使用动网格模拟流致振动在模拟流致振动这个问题,在网 上的许多文献都是是用fluent+UDF的办法加以解决,而软件教学书本上 常常使用的是workbench进行流固耦合模拟。请问使用以上哪一种方法较 好(较好发文章)呢?并且请教一下流致振动这一块,需要学习什么样的 基础知识呢? fluent+UDF和workbench进行耦合,是两种不同的处理方式。 如果只是发文章,两种方法都可以。 /ap/bd/Q/qv/id/12199
Common Mode Filter Design Guide

Common M ode F ilter D esign G uideIntroductionThe selection of component values for common mode filters need not be a difficult and confusing process. The use of standard filter alignments can be utilized to achieve a relatively simple and straightforward design process, though such alignments may readily be modified to utilize pre-defined component values.GeneralLine filters prevent excessive noise from being conducted between electronic equipment and the AC line; generally, the emphasis is on protecting the AC line. Figure 1 shows the use of a common mode filter between the AC line (via impedance matching circuitry) and a (noisy) power con-verter. The direction of common mode noise (noise on both lines occurring simultaneously referred to earth ground) is from the load and into the filter, where the noise common to both lines becomes sufficiently attenuated. The result-ing common mode output of the filter onto the AC line (via impedance matching circuitry) is then negligible.Figure 1.Generalized line filteringThe design of a common mode filter is essentially the design of two identical differential filters, one for each of the two polarity lines with the inductors of each side coupled by a single core:L2Figure 2.The common mode inductorFor a differential input current ( (A) to (B) through L1 and (B) to (A) through L2), the net magnetic flux which is coupled between the two inductors is zero.Any inductance encountered by the differential signal is then the result of imperfect coupling of the two chokes; they perform as independent components with their leak-age inductances responding to the differential signal: the leakage inductances attenuate the differential signal. When the inductors, L1 and L2, encounter an identical signal of the same polarity referred to ground (common mode signal), they each contribute a net, non-zero flux in the shared core; the inductors thus perform as indepen-dent components with their mutual inductance respond-ing to the common signal: the mutual inductance then attenuates this common signal.The First Order FilterThe simplest and least expensive filter to design is a first order filter; this type of filter uses a single reactive component to store certain bands of a spectral energy without passing this energy to the load. In the case of a low pass common mode filter, a common mode choke is the reactive element employed.The value of inductance required of the choke is simply the load in Ohms divided by the radian frequency at and above which the signal is to be attenuated. For example, attenu-ation at and above 4000 Hz into a 50⏲ load would require a 1.99 mH (50/(2π x 4000)) inductor. The resulting common mode filter configuration would be as follows:50Ω1.99 mHFigure 3.A first order (single pole) common mode filter The attenuation at 4000 Hz would be 3 dB, increasing at 6 dB per octave. Because of the predominant inductor dependence of a first order filter, the variations of actual choke inductance must be considered. For example, a ±20% variation of rated inductance means that the nominal 3 dB frequency of 4000 Hz could actually be anywhere in the range from 3332 Hz to 4999 Hz. It is typical for the inductance value of a common mode choketo be specified as a minimum requirement, thus insuring that the crossover frequency not be shifted too high.However, some care should be observed in choosing a choke for a first order low pass filter because a much higher than typical or minimum value of inductance may limit the choke’s useful band of attenuation.Second Order FiltersA second order filter uses two reactive components and has two advantages over the first order filter: 1) ideally, a second order filter provides 12 dB per octave attenuation (four times that of a first order filter) after the cutoff point,and 2) it provides greater attenuation at frequencies above inductor self-resonance (See Figure 4).One of the critical factors involved in the operation of higher order filters is the attenuating character at the corner frequency. Assuming tight coupling of the filter components and reasonable coupling of the choke itself (conditions we would expect to achieve), the gain near the cutoff point may be very large (several dB); moreover, the time response would be slow and oscillatory. On the other hand, the gain at the crossover point may also be less than the presumed -3 dB (3 dB attenuation), providing a good transient response, but frequency response near and below the corner frequency could be less than optimally flat.In the design of a second order filter, the damping factor (usually signified by the Greek letter zeta (ζ )) describes both the gain at the corner frequency and the time response of the filter. Figure (5) shows normalized plots of the gain versus frequency for various values of zeta.Figure 4.Analysis of a second order (two pole) common modelow pass filterThe design of a second order filter requires more care and analysis than a first order filter to obtain a suitable response near the cutoff point, but there is less concern needed at higher frequencies as previously mentioned.A ≡ ζ = 0.1;B ≡ ζ = 0.5;C ≡ ζ = 0.707;D ≡ ζ = 1.0;E ≡ ζ = 4.0Figure 5.Second order frequency response for variousdamping f actors (ζ)As the damping factor becomes smaller, the gain at the corner frequency becomes larger; the ideal limit for zero damping would be infinite gain. The inherent parasitics of real components reduce the gain expected from ideal components, but tailoring the frequency response within the few octaves of critical cutoff point is still effectively a function of ideal filter parameters (i.e., frequency, capaci-tance, inductance, resistance).L0.1W n1W n 10W nRadian Frequency,WG a i n (d B )V s V s LR s LCs LC j L R j LC LR LCCMout CMin L L n n n L ()()=++=−+⎛⎝⎜⎞⎠⎟=+−⎛⎝⎜⎞⎠⎟≡≡≡≡111111212222ωωζωωωωωωζradian frequencyR the noise load resistance LFor some types of filters, the design and damping char-acteristics may need to be maintained to meet specific performance requirements. For many actual line filters,however, a damping factor of approximately 1 or greater and a cutoff frequency within about an octave of the calculated ideal should provide suitable filtering.The following is an example of a second order low pass filter design:1)Identify the required cutoff frequency:For this example, suppose we have a switching power supply (for use in equipment covered by UL478) that is actually 24 dB noisier at 60 KH z than permissible for the intended application. For a second order filter (12dB/octave roll off) the desired corner frequency would be 15 KHz.2)Identify the load resistance at the cutoff frequency:Assume R L = 50 Ω3)Choose the desired damping factor:Choose a minimum of 0.707 which will provide 3 dB attenuation at the corner frequency while providing favorable control over filter ringing.4)Calculate required component values:Note:Damping factors much greater than 1 may causeunacceptably high attenuation of lower frequen-cies whereas a damping factor much less than 0.707 may cause undesired ringing and the filter may itself produce noise.Third Order FiltersA third order filter ideally yields an attenuation of 18 dB per octave above the cutoff point (or cutoff points if the three corner frequencies are not simultaneous); this is the prominently positive aspect of this higher order filter. The primary disadvantage is cost since three reactive compo-nents are now required. H igher than third order filters are generally cost-prohibitive.Figure 6.Analysis of a third order (three pole) low pass filter where ω1, ω2 and ω4 occur at the same -3dB frequency of ω05)Choose available components:C = 0.05 µF (Largest standard capacitor value that will meet leakage current requirements for UL478/CSA C22.2 No. 1: a 300% decrease from design)L = 2.1 mH (Approx. 300% larger than design to compensate for reduction or capacitance: Coilcraft standard part #E3493-A)6)Calculate actual frequency, damping factor, and at-tenuation for components chosen:ζ = 2.05 (a damping factor of about 1 or more is acceptible)Attenuation = (12 dB/octave) x 2 octaves = 24 dB 7)The resulting filter is that of figure (4) with:L = 2.1 mH; C = 0.05 µF; R L = 50 ΩL 1L 2VCMout s VCMin s R R L s R L s sC R L s sC R L s L L s L s sC L L R s L Cs L L C R s L L L L L L L()()()()=+⎛⎝⎜⎞⎠⎟+++++⎛⎝⎜⎜⎜⎜⎞⎠⎟⎟⎟⎟=++++222121*********11Butterworth →+++112212233s s s n n n ωωω()()L L R R L L L n n L 12111222+==+ωω;()L L C n 1n2C =2;ωω2211414=.L L L L n n n 12L n3n2L2n2L2C R =1;R R ωωωωωω33224422===ωπωζωμn n n Lf C L L R L =====294248070727502rad /sec =1Hn .1215532πLC=Hz (very nearly 15KHz)The design of a generic filter is readily accomplished by using standard alignments such as the Butterworth (“maxi-mally flat”) alignments. Figure (6) shows the general analysis and component relationships to the Butterworth alignments for a third order low pass filter. Butterworth alignments provide an inherent ζ of 0.707 and a -3 dB point at the crossover frequency. The Butterworth alignments for the first three orders of low pass filters are shown in Figure (7).The design of a line filter need not obey the Butterworth alignments precisely (although such alignments do pro-vide a good basis for design); moreover, because of leakage current limits placed upon electronic equipment (thus limiting the amount of filter capacitance to ground),adjustments to the alignments are usually required, but they can be executed very simply as follows:1)First design a second order low pass with ζ ≥ 0.52)Add a third pole (which has the desired corner fre-quency) by cascading a second inductor between the second order filter and the noise load:L = R/ (2 π f c )Where f c is the desired corner frequency.Design ProcedureThe following example determines the required compo-nent values for a third order filter (for the same require-ments as the previous second order design example).1)List the desired crossover frequency, load resistance:Choose f c = 15000 Hz Choose R L = 50 Ω2)Design a second order filter with ζ = 0.5 (see second order example above):3)Design the third pole:R L /(2πf c ) = L 250/(2π15000) = 0.531 mH4)Choose available components and check the resulting cutoff frequency and attenuation:L2 = 0.508 mH (Coilcraft #E3506-A)f n= R/(2πL 1 )= 15665 HzAttenuation at 60 KHZ: 24 dB (second order filter) +2.9 octave × 6 = 41.4 dB5)The resulting filter configuration is that of figure (6)with:L 1 = 2.1 mH L 2 = 0.508 mH R L = 50 ΩConclusionsSpecific filter alignments may be calculated by manipu-lating the transfer function coefficients (component val-ues) of a filter to achieve a specific damping factor.A step-by-step design procedure may utilize standard filter alignments, eliminating the need to calculate the damping factor directly for critical filtering. Line filters,with their unique requirements, yet non-critical character-istics, are easily designed using a minimum allowable damping factor.Standard filter alignments assume ideal filter compo-nents; this does not necessarily hold true, especially at higher frequencies. For a discussion of the non-ideal character of common mode filter inductors refer to the application note “Common Mode Filter Inductor Analysis,”available from Coilcraft.Figure 7.The first three order low pass filters and their Butterworth alignmentse i +–e O +–R LL 2Ce i +–e O +–R LL 1Ce i +–e O +–R LL 1L 2Filter SchematicFilter Transfer FunctionButterworthAlignmentFirst OrderSecond OrderThird Ordere e Ls R o iL =+11e e LCs Ls R oi L=++112e e L L R s L Cs L L s R o iLL =++++111231212()e e s o in=+11ωe e LCs Ls R oiL =++112e e s s so i n n n =+++122133221ωωω。
CFDesign中文教程
亚音速流 低速流动 0.0<Mach<0.3,可以认为是不可压流,等熵 0.3<Mach<0.8,通常认为是轻微的可压流,等熵
跨音速流 0.8<Mach<1.2,认为是可压流,不等熵 可能会有激波的存在
Email: caeda@, Tel:010-6837 3930
CAEDA(原 ECSD)
使用滑动按钮就可以对模型进行半剖显示,如下图
Email: caeda@, Tel:010-6837 3930
CAEDA(原 ECSD)
标准显示和旋转。点击这个按钮,会弹出下面的窗口
使用滑动按钮就可以对模型进行定量的旋转显示。
左:缩放。点击这个按钮,然后在主窗口拖出一个矩形区域,释放鼠标,就完 成了对这个区域的放大。右:恢复到前一个图像(角度和缩放)。
Feather Tree(特征树)中所有的设置选项一目了然,用户可以直观的看到一个模型的所 有信息并可以方便的更改设置,它包括单位设置、坐标系选择、计算域由哪些个体构成、材 料设置、边界条件的设置、初始化和体面线网格大小几个方面。
EFDC翻译

EFDC翻译EFDC输⼊⽂件:1、⽔平⽹格特性⽂件cell.inp⽔平⽹格标识符celllt.inp⽔平⽹格标识符(⽤于平均⽔体迁移)depth.inp⽔体深度、底部海拔、底部粗糙度(⽤于笛卡尔⽹格)dxdy.inp⽔平⽹格的间距、深度、底部海拔、底部粗糙度、植被等级等(⽤于笛卡尔⽹格或正交⽹格)gcellmap.inp正交⽹格覆盖(⽤于笛卡尔⽹格)lxly.inp⽔平⽹格中⼼坐标及⽹格⽅向(⽤于笛卡尔⽹格或正交⽹格)mappgns.inp模型⽹格的特定配置(代表南北或Y⽅向的周期性区域)mask.inp松散边界设置(⽤户限制⽔流经过特殊⽹格表⾯)2、基本数据及启动控制⽂件efdc.inp主控⽂件show.inp将屏幕打印控制在特定的⽹格区域(模拟运⾏后)3、初始化及重新启动控制⽂件salt.inp初始盐度扩散(⽤于冷启动盐度分层流动模拟)dye.inp染料最初扩散(⽤于冷启动模拟)restart.inp 重新启动⼀个模拟restran.inp任意时间间隔的平均迁移区域(仅⽤于⼤规模迁移模拟)4、物理变化模拟⽂件gwater.inp⼟壤湿度模型特点modchan.inp⼦⽹格通道模型设置moddxdy.inp⽹格⼤⼩修改(主要⽤于⼦⽹格通道宽度⽐例校准)qctl.inp液压控制结构描述vege.inp植被阻⼒特性wave.inp波流边界层模型或波浪感应电流(⾼频表⾯重⼒波场的激活条件)5、时间序列及边界条件aser.inp⼤⽓压⼒时间序列dser.inp染料浓度时间序列pser.inp开放边界的⽔位时间序列qser.inp容积源库时间序列sdser.inp悬沙浓度时间序列sfser.inp贝类排泄时间序列sfbser.inp贝类⾏为时间序列sser.inp盐度时间序列tser.inp温度时间序列6、其他⽂件fldang.inp 本地M2潮汐椭圆涨潮流轴的逆时针⾓度EFDC输出⽂件:1、诊断输出⽂件2、重新启动和运输⽂件3、时间序列,点样本和最⼩⼆乘谐波分析输出⽂件4、⼆维图形和可视化⽂件5、三维图形和可视化⽂件⽹格⽣成及预处理:EFDC建模系统配置的第⼀步是定义被建模区域的⽔平⾯域。
DesignCompile使用说明之一

Design Compile使用说明孙枫叶一.软件说明Design Compile是synopsys的综合软件,它的功能是把RTL级的代码转化为门级网表。
综合包括转译(Translation),优化(Opitimization),映射(Mapping)三个过程。
在转译的过程中,软件自动将源代码翻译成每条语句所对应的功能模块以及模块之间的拓扑结构,这一过程是在综合器内部生成电路的布尔函数的表达,不做任何的逻辑重组和优化。
优化:基于所施加的一定时序和面积的约束条件,综合器按照一定的算法对转译结果作逻辑优化和重组。
在映射过程中,根据所施加的一定的时序和面积的约束条件,综合器从目标工艺库中搜索符合条件的单元来构成实际电路。
DC有两种界面,图形界面通过敲入design vision&调用出来,另一种命令行界面通过dc_shell-t调用。
建议初学者使用图形界面,因为图形界面比较容易上手;业界的人士比较青睐命令行界面,因为其所耗的资源少,并且将所用的命令写成综合脚本的形式,便于查阅。
因为门级和代码级不同,代码级考虑的是理想情况,但是实际电路不是这样的,它有门级的延时,线的延时,信号的转换时间,甚至时钟信号到达各个触发器的时间不相等。
基于这些考虑,DC通过施加约束,模拟实际环境,根据实际情况得出门级网表。
因此如何适当的施加约束是DC的关键所在。
二.库的配置通过上述说明可知,DC需要通用库和工艺库的支持,DC用到的工艺库是.db或者是.lib格式的,其中.lib格式的文件是可读得,通过此文件可以了解库的详细信息,比如说工作电压,操作温度,工艺偏差等等。
.db格式的库是二进制的,不可读。
.db格式的库由.lib格式的库通过命令read_lib生成。
目标工艺库(Target_library):是指将RTL级的HDL描述到门级时所需的标准单元综合库,它是由芯片制造商(Foundry)提供的,包含了物理信息的单元模型。
Application Note AC147说明书
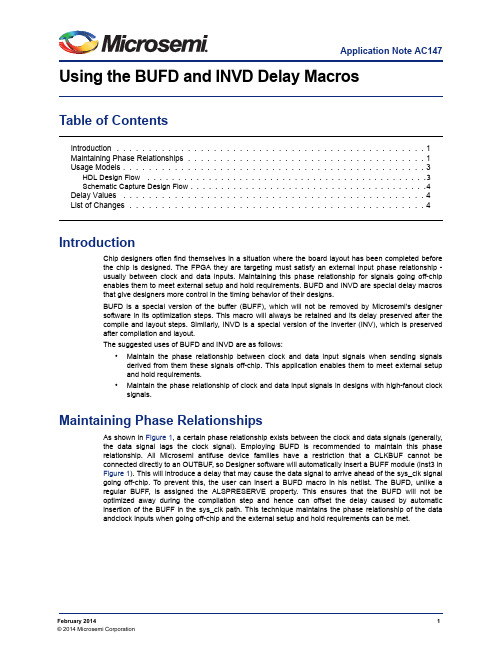
Application Note AC147February 20141© 2014 Microsemi CorporationUsing the BUFD and INVD Delay MacrosTable of ContentsIntroductionChip designers often find themselves in a situation where the board layout has been completed before the chip is designed. The FPGA they are targeting must satisfy an external input phase relationship -usually between clock and data inputs. Maintaining this phase relationship for signals going off-chip enables them to meet external setup and hold requirements. BUFD and INVD are special delay macros that give designers more control in the timing behavior of their designs.BUFD is a special version of the buffer (BUFF), which will not be removed by Microsemi’s designer software in its optimization steps. This macro will always be retained and its delay preserved after the compile and layout steps. Similarly, INVD is a special version of the inverter (INV), which is preserved after compilation and layout.The suggested uses of BUFD and INVD are as follows:•Maintain the phase relationship between clock and data input signals when sending signals derived from them these signals off-chip. This application enables them to meet external setup and hold requirements.•Maintain the phase relationship of clock and data input signals in designs with high-fanout clock signals.Maintaining Phase RelationshipsAs shown in Figure 1, a certain phase relationship exists between the clock and data signals (generally,the data signal lags the clock signal). Employing BUFD is recommended to maintain this phase relationship. All Microsemi antifuse device families have a restriction that a CLKBUF cannot be connected directly to an OUTBUF, so Designer software will automatically insert a BUFF module (inst3 in Figure 1). This will introduce a delay that may cause the data signal to arrive ahead of the sys_clk signal going off-chip. To prevent this, the user can insert a BUFD macro in his netlist. The BUFD, unlike a regular BUFF, is assigned the ALSPRESERVE property. This ensures that the BUFD will not be optimized away during the compilation step and hence can offset the delay caused by automatic insertion of the BUFF in the sys_clk path. This technique maintains the phase relationship of the data andclock inputs when going off-chip and the external setup and hold requirements can be met.Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1Maintaining Phase Relationships . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1Usage Models . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3HDL Design Flow . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3Schematic Capture Design Flow . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4Delay Values . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4List of Changes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4Using the BUFD and INVD Delay Macros2In Figure2, the clock signal coming from the CLKBUF has a high fanout. This means increased capacitive loading and hence increased delay. In contrast, the data signal has a fanout of only one. The clock network’s high fanout may allow the data input to (undesirably) lead the clock signal. Again, introducing one or more BUFD macros (inst1) in the data signal path provides enough delay to offset the delay of the high-fanout clock net.Figure 1 • Control of Phase Relationship between Data and System Clock using BUFDUsage Models3If inversion of the signal is required in addition to delay, the INVD macro is available. Again, the ALSPRESERVE property is assigned to this macro to avoid elimination during optimization steps.Usage ModelsHDL Design FlowNone of the synthesis tools that support Microsemi technologies will infer the INVD or BUFD macros in the synthesized netlist. Simulation library models of INVD and BUFD, similar to their INVD and BUFF counterparts, are available from Microsemi in both VHDL and Verilog. The manual process for buffer insertion is as follows:1.Import the synthesized netlist into Designer. Run compile and layout.2.Invoke Timer from Designer to check the timing/phase relationships for the signals of interest.ing a text editor, manually modify the netlist and insert BUFD and/or INVD macros into thedesired paths.4.Import the modified netlist into Designer. Again run compile and layout.5.Invoke Timer again to review the delays for the signals of step 2.If necessary, repeat steps 3 through 5 until the design timing requirements are met.Figure 2 • Control of Phase Relationship in Designs with High Clock FanoutsUsing the BUFD and INVD Delay Macros4Schematic Capture Design FlowINVDs and BUFDs are available for the following Microsemi-supported schematic capture tools:•ConceptHDL PE13.5 and PE13.6•Mentor Graphics c.4 and D.1•Workview Office 7.5•Powerview 6.1•ePD 1.0•ePD 1.1 TypicalTo avoid inadvertent instantiation of INVD or BUFD where INV or BUFF is intended, the graphicalsymbols for INVD and BUFD have warning labels "Special Use Only." The flow for buffer insertion is as follows:1.Generate an EDIF netlist with the schematic tool.2.Import the EDIF netlist into Designer. Run compile and layout.3.Invoke Timer from Designer to check the timing/phase relationships for the signals of interest.4.Edit the schematics to insert BUFD and/or INVD macros into the desired paths.5.Check and save your schematics. Generate an EDIF netlist from the modified schematics.6.Import the modified netlist into Designer. Again run compile and layout.7.Invoke Timer again to review the delays for the signals of step 3.8.If necessary, repeat steps 4 through 7 until the design timing requirements are met.Delay ValuesTable 1 shows the rising (R) and falling (F) delays for INVD and BUFD in different Microsemi families.These values are obtained using the fastest speed grade for the device using typical temperature,voltage, and process corners as well as optimized placement. Actual delay numbers may vary with the device, speed grade, and actual placement.List of ChangesThe following table lists critical changes that were made in the current version of the document.Table 1 • BUFD/INVD Delay for Various Microsemi Technology FamiliesACT1ACT2ACT33200DX 42Mx SX eX RTAX-S Units BUFD R 3.9 4.3 2.6 4.2 1.80.7 1.1 4.5ns F 3.7 3.5 2.5 3.4 1.60.7 1.1 4.6ns INVD R 3.8 4.3 2.4 3.9 1.80.7 1.1 6.5ns F3.6 3.6 2.2 3.2 1.60.7 1.1 6.1nsSpeed Grade-3-1-3-3-3-3STD-1Revision ChangesPage Revision 1(February 2014)Table 1 is updated to include RTAX-S values (SAR 47788).45192673-1/02.14© 2014 Microsemi Corporation. All rights reserved. Microsemi and the Microsemi logo are trademarks of Microsemi Corporation. All other trademarks and service marks are the property of their respective owners.Microsemi Corporation (NASDAQ: MSCC) offers a comprehensive portfolio of semiconductor solutions for: aerospace, defense and security; enterprise and communications; and industrial and alternative energy markets. Products include high-performance, high-reliability analog and RF devices, mixed signal and RF integrated circuits, customizable SoCs, FPGAs, and complete subsystems. Microsemi is headquartered in Aliso Viejo, Calif. Learn more at .Microsemi Corporate HeadquartersOne Enterprise, Aliso Viejo CA 92656 USA Within the USA: +1 (949) 380-6100Sales: +1 (949) 380-6136Fax: +1 (949) 215-4996。
毕业设计-英文翻译、译文--一种混沌图像加密并行算法-英译中附英文原文【范本模板】

附件C :译文基于离散混沌映射的图像加密并行算法摘要:最近,针对图像加密提出了多种基于混沌的算法。
然而,它们都无法在并行计算环境中有效工作。
在本文中,我们提出了一个并行图像加密的框架.基于此框架内,一个使用离散柯尔莫哥洛夫流映射的新算法被提出.它符合所有并行图像加密算法的要求.此外,它是安全、快速的。
这些特性使得它是一个很好的基于并行计算平台上的图像加密选择。
1. 介绍最近几年,通过计算机网络尤其是互联网传输的数字图像有了快速增长。
在大 多数情况下,传输通道不够安全以防止恶意用户的非法访问。
因此,数字图像的安全性和隐私性已成为一个重大问题.许多图像加密方法已经被提出,其中基于混沌的方法是一种很有前途的方向[1-9].总的来说,混沌系统具有使其成为密码系统建设中重要组成部分的几个属性:(1)随机性:混沌系统用确定的方法产生长周期、随机的混沌序列。
(2)敏感性:初始值或系统参数的微小差异导致混沌序列的巨大变化. (3)易用性:简单的公式可以产生复杂的混沌序列。
(4)遍历性:一个混沌状态的变量能够遍历它的相空间里的所有状态,通常这些状态都是均匀分布的.除了上述性能,有些二维(2D )的混沌映射是图像像素置换天生的优良替代者。
Pichler 和Scharinger 提出一种在扩散操作[1,2]之前使用柯尔莫哥洛夫流映射的图像排列方式.后来,Fridrich 将此方法扩展到更广义的方式[3].陈等人提出基于三维猫映射的图像加密算法[4]l 。
Lian 等人提出基于标准映射的另一种算法[5]。
其实,这些算法在相同的框架下工作:所有的像素在用密码分组链接模式(CBC)模式下的加密之前首先被用离散混沌映射置换,当前像素密文由以前的像素密文影响。
上述过程重复几轮,最后得到加密图像.这个框架可以非常有效的实现整个图像的扩散。
但是,它是不适合在并行计算环境中运行。
这是因为当前像素的处理无法启动直到前一个像素已加密.即使有多个处理元素(PE),这种计算仍然是在一个串行模式下工作.此限制了其应用平台,因为许多基于FPGA / CPLD或者数字电路的设备可以支持并行处理。
翻译
在塑料注射成型中以系统的计算机辅助方法优化设计冷却系统H. Qiao*Cardiff School of Engineering, Queen’s Buildings, The Parade, PO Box 925, Cardiff, CF24 0YF,UKReceived 10 December 2003; received in revised form 10 October 2005; accepted 10 November2005 A vailable online 27 December 2005摘要在塑料注射成型中,由于冷却系统显著影响最终产品的产量和质量,因此冷却系统的设计十分重要。
在本文中,将一种系统的计算机辅助方法开发应用于冷却系统的优化设计。
该方法补偿了一般的传统冷却系统设计中设计师以经验和直觉为基础的反复试验过程。
研究表明,冷却系统设计的优化过程中的各个方面包括使用边界元法(BEM)进行冷却分析,基于扰动设计的灵敏度分析方法,优化问题公式化,以及基于DFP法和SA法的新型混合优化方法。
对实例的研究表明,我们所提出的冷却系统的优化设计方法是高效,可靠和实用的。
1.介绍注塑周期由注射,保压,冷却等几个阶段组成。
由于冷却阶段占用注塑周期中约80%的时间,因此冷却系统设计具有相当大的重要性。
冷却系统必须能够以所需的速率带走热量以便塑料制件可以在开模中不产生变形。
同时,冷却部分应尽可能均匀和平衡,以减少不必要的缺陷,比如凹陷,不均匀收缩,内部热残余应力和翘曲。
在冷却系统的设计中,设计变量通常包括冷却通道的尺寸、位置和布局以及冷却液的热性能、温度和流速。
因为这么多的设计参数的涉及,所以设计确定最佳的冷却系统的工作是非常困难的。
传统过程中,设计者利用他的经验和直觉指导设计过程。
人工设计过程的优点是可以利用设计师的判决设计。
然而,当设计问题变得更加复杂,仅基于设计师判断的人工设计过程不足以完成,甚至是不可能的。
CFX边界条件及CCL语言-精品文档

施加边界条件文件的步骤
在CFX-Pre中读入边界条件文件。这个可以通过 Tools>Initialize Profile Data 并选择相应的文件来实 现。我们也可以载入多个边界条件文件,每一个文件也 可以应用在多个地方。
CFX 10.0
3-8
© 2005 ANSYS CHINA, Inc.
施加边界条件文件的步骤
可选项取决于边界类型及域的 设定
- 例如:超音速的可选性取决于 域设定里面的热传递模型 - 在右边例子中,只模拟了湍流 (i.e. 没有传热或多组分/多相流 模拟)
CFX 10.0
3-4
© 2005 ANSYS CHINA, Inc.
边界类型
进口
• 流体自进口流入计算域: 用白色箭头表示
出口
边界条件/CFX表达式语言
讲座 3
3-1
© 2005 ANSYS CHINA, Inc.
CFX 10.0
边界条件
在计算域的所有外部边界上都需要 尽量采用意义明确的名字(你不需要接受系统的默认名 字) 选择边界所在的域 (当计算中有多个域的时候适用).
CFX 10.0
3-2
© 2005 ANSYS CHINA, Inc.
3-5
© 2005 ANSYS CHINA, Inc.
CFX 10.0
预设边界条件
• 可以通过对已知数据文件的插值来设定边界条件. • 我们经常使用以前的模拟结果或已知的实验数据作为当 前模拟的边界条件 • CFX-Pre 可以用插分功能来根据读入的数据生成CEL 表 达式. • 当我们采用“Profile”方法设定边界条件时,这些数据是 自动生成的.
lcs拉格朗日逆序结构ftle的matlab程序

LCS拉格朗日逆序结构FTLE的MATLAB程序近年来,随着数值计算技术的不断发展和进步,拉格朗日 Coherent Structures(LCS)的研究受到了人们的关注。
其中,FTLE(Finite Time Lyapunov Exponent)是一种用于分析流场中动力学特性的有效工具。
本文将重点介绍LCS的拉格朗日逆序结构,并给出相应的MATLAB程序。
文章结构将分为以下几个部分:一、LCS拉格朗日逆序结构的理论基础1.1 LCS的概念和意义LCS是指在流场中能够保持较长时间的运动特性,能够有效地分割流场并保持其结构的特殊曲线或曲面。
LCS的研究可以帮助人们更好地理解流体运动的轨迹、混沌性质等。
1.2 拉格朗日逆序结构的概念拉格朗日逆序结构是指沿着LCS的反向时间演化轨迹所形成的结构。
通过分析拉格朗日逆序结构,可以揭示流场中的潜在动力学特征。
二、FTLE在LCS研究中的应用2.1 FTLE的定义FTLE是描述流体微元在一定时间内本征扩张率的指标,可以用于揭示流场中的混沌程度、涡旋结构等动力学特性。
2.2 FTLE与LCS的关系通过计算FTLE场,可以获取LCS的有用信息,帮助人们识别流场中的动力学结构。
三、MATLAB程序设计与实现3.1 计算流场的微分方程需要根据流场的描述方程,编写相应的微分方程。
3.2 计算FTLE场利用编写好的微分方程,可以通过MATLAB程序计算得到流场的FTLE场。
3.3 分析拉格朗日逆序结构在获取了FTLE场之后,可以通过特定的算法和计算方法分析得到LCS的拉格朗日逆序结构。
四、实例分析本文将给出一个具体的实例分析,通过该实例可以更加直观地了解LCS的拉格朗日逆序结构并应用MATLAB程序进行计算。
通过以上的内容,读者可以初步了解LCS的拉格朗日逆序结构及其在流场分析中的重要性,并且能够掌握相应的MATLAB程序设计和实现方法。
希望本文对LCS研究和MATLAB程序设计有所帮助。
一个三维四翼混沌系统的分岔分析及其电路实现
一个三维四翼混沌系统的分岔分析及其电路实现
鲍慧玲;薛华
【期刊名称】《合肥工业大学学报(自然科学版)》
【年(卷),期】2014(000)002
【摘要】文章提出了一个新的含有5个平衡点的三维四翼混沌系统,深入分析了
所有平衡点的Hopf分岔和全局分岔过程。
理论分析证明,在特定平衡点上能产生Hopf分岔现象;Lyapunov指数和数值分岔分析证明,当系统的参数发生变化时,系统轨迹由不动点过渡到周期轨、混沌吸引子;最后利用模拟器件设计了该混沌系统的硬件电路,理论分析与电路实验结果一致,电路实验验证了三维四翼混沌系统的存在性。
【总页数】5页(P155-158,208)
【作者】鲍慧玲;薛华
【作者单位】上海科学技术职业学院通信与电子信息系,上海 201800;滨州学院
物理与电子科学系,山东滨州 256603
【正文语种】中文
【中图分类】TM132
【相关文献】
1.一个四维四翼混沌系统及其电路实现 [J], 鲁池梅
2.一个超混沌四翼系统的电路实现及其异结构同步 [J], 杨志宏;屈双惠;容旭巍;张
彩霞
3.一个分数阶四翼混沌系统的动力学特性及其多元电路实现 [J], 杨志宏;屈双惠;马志春;张彩霞
4.一个四翼超混沌系统的多翼效应及其控制电路实现 [J], 杨志宏;屈双惠;王清
5.一个四翼超混沌系统的电路实现及其同步控制 [J], 屈双惠;容旭巍;吴淑花;杨志宏;于津江
因版权原因,仅展示原文概要,查看原文内容请购买。
Origin8.0在超声波频谱分析实验课中的应用

与其他常规无损检测技术相比,超声波频谱分析技术具有检测范围广,检测深度大;缺陷定位准确,检测灵敏度高等特点,在材料超声检测和评价中得到了广泛应用。
超声波频谱分析是把频谱分析的理论和方法应用于超声检测的技术。
其中,频谱分析是一种比较成熟的信号处理技术,基于频谱分析方法的信号处理技术成为现代超声检测技术的重要组成部分。
频谱分析是指应用傅立叶变换将时域问题转换为频域问题,在频域内对信号进行分析。
超声检测中采集到的各种波形如反射波、透射波、表面波、散射波等,利用频谱分析技术从采集到的这些信息中,提取尽可能多的有关传输通道的特征信息,如振幅、相位、相位差或者是功率谱、相关谱、倒频谱等,用于研究和分析被检对象物理性能的细微变化和不连续性[1-3]。
对此,超声频谱信号处理是实验课程的重点,旨在强化学生对信号处理的重视程度,熟悉和掌握Origin软件里的“信号处理”模块的功能,加深学生对频谱分析方法理论知识的进一步理解和巩固。
Origin8.0[4]是Window平台下应用于科技作图和数据分析的软件,由Origin Lab公司开发。
它是一个多文档界面应用程序,采用直观的、图形化的、面向对象的窗口菜单和工具栏操作。
操作方便且功能强大,能满足复杂的数据分析[5,6]、图形处理[7]、函数拟合[8]、信号处理[9,10]等高级功能,因此它在教学、科研、工程技术等领域具有广泛的应用。
在超声波频谱分析实验中充分利用了Origin软件中信号处理功能,大大简化数据处理过程,充分发挥软件快捷、高效、精度高等特点。
在本文中,我们利用Origin8.0处理采集的超声数据信号,研究内容包括以下四个方面:(1)信号采样与滤波。
(2)数据截断与加零处理。
(3)信号加窗处理。
(4)幅度谱与相位谱分析。
完整地实践超声数字信号频谱分析的整个过程:采样→滤波→截断→FFT(加窗)→得到幅度谱、相位谱。
一、实验设备本实验采用水浸聚焦脉冲回波超声检测系统采集试样的一次表面回波[11]。
阳极标准DNV RP-F103

RECOMMENDED PRACTICED ET N ORSKE VERITASDNV-RP-F103CATHODIC PROTECTION OF SUBMARINE PIPELINES BYGALVANIC ANODESOCTOBER 2003Since issued in print (October 2003), this booklet has been amended, latest in April 2006.See the reference to “Amendments and Corrections” on the next page.Comments may be sent by e-mail to rules@For subscription orders or information about subscription terms, please use distribution@Comprehensive information about DNV services, research and publications can be found at http :// , or can be obtained from DNV, Veritas-veien 1, NO-1322 Høvik, Norway; Tel +47 67 57 99 00, Fax +47 67 57 99 11.© Det Norske Veritas. All rights reserved. No part of this publication may be reproduced or transmitted in any form or by any means, including pho-tocopying and recording, without the prior written consent of Det Norske puter Typesetting (FM+SGML) by Det Norske Veritas.Printed in NorwayIf any person suffers loss or damage which is proved to have been caused by any negligent act or omission of Det Norske Veritas, then Det Norske Veritas shall pay compensation to such person for his proved direct loss or damage. However, the compensation shall not exceed an amount equal to ten times the fee charged for the service in question, provided that the maximum compen-sation shall never exceed USD 2 million.In this provision "Det Norske Veritas" shall mean the Foundation Det Norske Veritas as well as all its subsidiaries, directors, officers, employees, agents and any other acting on behalf of Det Norske Veritas.FOREWORDDET NORSKE VERITAS (DNV) is an autonomous and independent foundation with the objectives of safeguarding life, prop-erty and the environment, at sea and onshore. DNV undertakes classification, certification, and other verification and consultancy services relating to quality of ships, offshore units and installations, and onshore industries worldwide, and carries out research in relation to these functions.DNV Offshore Codes consist of a three level hierarchy of documents:—Offshore Service Specifications. Provide principles and procedures of DNV classification, certification, verification and con-sultancy services.—Offshore Standards. Provide technical provisions and acceptance criteria for general use by the offshore industry as well asthe technical basis for DNV offshore services.—Recommended Practices. Provide proven technology and sound engineering practice as well as guidance for the higher levelOffshore Service Specifications and Offshore Standards.DNV Offshore Codes are offered within the following areas:A)Qualification, Quality and Safety Methodology B)Materials Technology C)Structures D)SystemsE)Special Facilities F)Pipelines and Risers G)Asset Operation H)Marine Operations J)Wind TurbinesAmendments and CorrectionsThis document is valid until superseded by a new revision. Minor amendments and corrections will be published in a separate document normally updated twice per year (April and October).For a complete listing of the changes, see the “Amendments and Corrections” document located at: /technologyservices/, “Offshore Rules & Standards”, “Viewing Area”.The electronic web-versions of the DNV Offshore Codes will be regularly updated to include these amendments and corrections.Amended April 2006,Recommended Practice DNV-RP-F103, October 2003 see note on front cover Page 3CONTENTS1.GENERAL (5)1.1Introduction (5)1.2Scope (5)1.3Objectives and use (6)1.4Structure of document (6)1.5Relation to DNV-OS-F101 and other DNVdocuments on pipeline corrosion control (6)2.REFERENCES (7)2.1DNV (Det Norske Veritas) (7)2.2EN (European Standards) (7)2.3ISO (International Organisation forStandardization) (7)3.TERMINOLOGY AND DEFINITIONS (7)4.ABBREVIATIONS AND SYMBOLS (7)4.1Abbreviations (7)4.2Symbols for CP design parameters (7)5.CATHODIC PROTECTION DETAILEDDESIGN (8)5.1General (8)5.2Calculation of mean current demand forcathodic protection (8)5.3Calculation of Final Current Demand forCathodic Protection (9)5.4Calculation of total anode net mass tomeet mean current demand (9)5.5Calculation of total anode current output tomeet final current demand (10)5.6Distribution of anodes (10)5.7Documentation of completed CPdetailed design (12)6.ANODE MANUFACTURING (12)6.1General (12)6.2Manufacturing procedure specification (12)6.3Pre-production qualification testing (PQT) (13)6.4Quality control of production (13)6.5Materials and casting (13)6.6Inspection and testing of anodes (13)6.7Documentation and marking (14)6.8Handling, storage and shipping of anodes (14)7.ANODE INSTALLATION (14)7.1Design of anode attachment (14)7.2Installation procedure specification (14)7.3Pre-production qualification testing (PQT) (15)7.4Quality control during production (15)7.5Receipt and handling of anodes and materials forinstallation (15)7.6Anode installation (15)7.7Inspection and testing of anode installation (15)7.8Documentation (15)8.ANNEX 1 RECOMMENDATIONS FORCOATING BREAKDOWN FACTORS (16)D ET N ORSKE V ERITASRecommended Practice DNV-RP-F103, October 2003Amended April 2006, Page 4see note on front coverD ET N ORSKE V ERITASAmended April 2006Recommended Practice DNV-RP-F103, October 2003 see note on front cover Page 51. General1.1 Introduction1.1.1 Submarine pipelines are designed with an external coat-ing as the primary system for corrosion control. Still, a cathodic protection (CP) system is normally provided as a back-up to account for any deficiency in the coating system. Such deficiencies may include holidays during coating manu-facturing, damage to the coating during transportation and installation of coated linepipe, and mechanical damage or other coating degradation during operation of the pipeline. In defining the required capacity of the CP system, the design of the pipeline coating system is the primary factor.Guidance note:Pipeline coatings may have other objectives in addition to corro-sion control, including mechanical protection, thermal insulation and/or anti-buoyancy. In its widest sense, the term “pipeline coating” includes “linepipe coating” (or “factory coating”) applied on individual pipe joints in a factory, “field joint coating”(FJC) and “coating field repairs” (CFR). In addition to the design of the coating system, the quality control of its application is essential for its performance and thus also for CP design.---e-n-d---of---G-u-i-d-a-n-c-e---n-o-t-e---1.1.2 Cathodic protection of pipelines can be achieved using galvanic (or “sacrificial”) anodes, or impressed current from rectifiers. For submarine pipelines, galvanic anode systems are most commonly applied. Such systems have traditionally been designed as self-contained systems with all anodes installed directly on the pipeline itself (bracelet type anodes). However, the CP design in this document (as in ISO 15589-2) allows for CP by anodes installed on adjacent structures electrically con-nected to the pipeline such as platform sub-structures, subsea templates and riser bases.For pipelines in CRA's susceptible to hydrogen induced stress cracking (HISC) by CP, this concept has the main advantage that the installation of anodes on the pipeline itself can be fully avoided for shorter lines.Guidance note:Apparently all failures of CRA pipelines due to HISC have been related to the welding of anodes to the pipeline causing stress concentrations, susceptible microstructure and defect coating.The concept of installing anodes on adjacent structures also has the advantage that the complete anode surfaces are exposed to seawater, increasing the anode electrochemical performance and the anode current output compared to those for anodes partly or fully covered by seabed sediments. Moreover, the potential for damage to the pipeline coating during installation is reduced.---e-n-d---of---G-u-i-d-a-n-c-e---n-o-t-e---1.1.3 The design of pipeline CP systems is mostly carried out in two steps; conceptual and detailed CP design. The ‘concep-tual CP design’ will typically include selection of anode mate-rial, tentative net mass and dimensions of anodes, and concept for fastening of anodes. The conceptual design shall further take into account potential detrimental effects of cathodic pro-tection such as the pipeline materials’ intrinsic susceptibility to hydrogen embrittlement by CP and the magnitude of local stresses induced during installation, commissioning and oper-ation of the pipeline that may lead to damage by HISC. For this conceptual CP design, reference is made to the applicable sec-tions of DNV-OS-F101 and ISO 15589-2 (see 1.3.1). During the ‘detailed CP design’ (i.e. as covered in this document), the final net anode mass and dimensions of anodes, and their dis-tribution on the pipeline are defined.1.2 Scope1.2.1 This Recommended Practice (RP) has been prepared to facilitate the execution of detailed CP design and the specifica-tion of galvanic anode manufacturing and installation. While the requirements and recommendations are general, the docu-ment contains advice on how amendments can be made to include project specific requirements. The document can also easily be amended to include requirements/guidelines by a reg-ulating authority, or to reflect the pipeline operator’s general philosophy on pipeline corrosion control.Guidance note:It is recommended that any additional conservatism is introduced by use of a “design factor” rather than modification of one or more of the many design parameters used for CP calculations.For example, it may be specified that the design life shall be based on the maximum estimated lifetime of the pipeline multi-plied with some constant larger than 1 (one).---e-n-d---of---G-u-i-d-a-n-c-e---n-o-t-e---1.2.2 The document covers the detailed design of CP for sub-marine pipeline systems (see 1.3.1) using galvanic anodes, either Al - or Zn -based, and the manufacturing and installation of such anodes. For CP of subsea manifold templates, riser bases and other subsea structures where components of a pipe-line system are electrically connected to major surfaces of structural C-steel, use of DNV-RP-B401 is recommended for CP design (see 1.5.3). For conceptual CP design, Sec.5 is applicable to preliminary calculations of the anode net mass and anode distribution. This RP is based on the sections in ISO 15589-2 that are applicable (see 1.3.1). For compliance with the general philosophy in DNV-OS-F101, primarily with respect to procedures for quality control, or for the purpose of clarification and guidance, some amendments are given. This RP further contains some formula for calculation of CP protec-tive range from adjacent structures and minimum distance between pipeline anodes that are not included in the ISO stand-ard. Default values for galvanic anode performance and design current densities that do not require any special qualification or field testing are also recommended.1.2.3 By referring to specific pipeline coating systems for linepipe, field joints and field repairs in DNV-RP-F102 and DNV-RP-F106, and implementing the detailed requirements for the quality control of their manufacturing as defined in these documents, specific design parameters for calculation of current demands for CP are recommended in this RP. This is to enable a CP design without any arbitrary allowance for deficiencies associated with the design and quality control of such coatings, reducing the need for excessive conservatism in the design. In this RP, and contrary to ISO 15589-2, the current demands for cathodic protection are calculated for specific combinations of linepipe and field joint coating.Guidance note:In case certain deviations from the requirements to coating design and/or quality control of manufacturing in DNV-RP-F106 and DNV-RP-F102 are identified, the CP design parameters associated with pipeline coatings in this document (i.e. “coating breakdown factors”) may still be applicable. However, the user of this document should then carefully assess the significance of any such deviations.---e-n-d---of---G-u-i-d-a-n-c-e---n-o-t-e---1.2.4 Full conceptual design of CP (see 1.1.3 and 1.2.2), detailed design of impressed current CP systems, testing of galvanic anode material for the purpose of either qualification or quality control, and the operation of pipeline CP systems are not addressed in this document. For these items, reference is made to the general guidelines in DNV-OS-F101 and the more detailed recommendations in ISO 15589-1, -2.1.2.5 Although considerations related to safety and environ-mental hazards associated with galvanic anode manufacturing and installation are of great importance, such are never-the-less beyond the scope of this document.D ET N ORSKE V ERITASRecommended Practice DNV-RP-F103, October 2003Amended April 2006 Page 6see note on front cover1.3 Objectives and use1.3.1 This RP complies with the requirements, recommenda-tions and guidelines in the applicable sections of ISO 15589-2. It is applicable to ‘submarine pipeline systems’ as defined in DNV-OS-F101, except risers above LAT for which cathodic protection is not efficient. For landfall sections protected by impressed current CP, reference is made to ISO 15589-1.1.3.2 The document has two major objectives. It may be used as a guideline to pipeline operator’s or their contractor’s execution of detailed CP design, and to the specification of gal-vanic anode manufacturing and installation. It may also be used as an attachment to an inquiry or purchase order specifi-cation for such work. If Purchaser has chosen to refer to this RP in a purchase document, then Contractor should consider all requirements in this document as mandatory (see Sec. 3), unless superseded by amendments and deviations in the spe-cific contract.1.3.3 CP design, anode manufacture and anode installation are typically carried out by three different parties (all referred to as Contractor in this RP). The party issuing a contract (Purchaser) may be either the installation contractor or Owner. For defini-tion of contacting parties and associated terms, see Sec.3. 1.3.4 Besides any reference to this document in a ‘purchase document’ (see definition in Sec. 3), the information given in 1.3.5 to 1.3.7 (intended as a check-list) shall be enclosed, as applicable to the detailed CP design, anode manufacturing and anode installation, respectively.1.3.5 For cathodic protection detailed design:—conceptual design report, if completed (5.1)—relevant data from pipeline design basis, including e.g.information on pipe material and dimensions, installation conditions, internal fluid temperature, marine environ-mental conditions, degree of burial or rock-dumping, line-pipe and field joint coating design, design life (5.1)—requirements to documentation and verification, including schedule for supply of documentation (5.7).1.3.6 For anode manufacturing:—anode material type (i.e. Al- or Zn-base) and any detailed requirements to chemical composition of anode material(6.5.1)—outline anode drawing (including anode cores) with tenta-tive tolerances (5.7.1)—project specific requirements to pre-production qualifica-tion testing (PQT), including schedule for notification and supply of documentation, number of anodes to be cast and tested destructively for each casting mould (6.3)—any special requirements to ‘manufacturing procedure specification’ (MPS) (6.2.1) or ‘inspection and testing plan’ (ITP) (6.4.2)—requirements for frequency of destructive testing during production, and for verification of bracelet anode tab posi-tions by measurements and/or anode fit-up test on adummy pipe sample (6.6.3)—any specific requirements to Contractor’s management of non-conformities and concession requests (6.6.7)—retaining of anode material specimens (6.6.1)—requirements to marking of anodes (6.7)—any specific requirements to handling, storage and ship-ping of anodes (6.8)—project specific requirements to final documentation, including schedule for supply (6.7).1.3.7 For anode installation:—anode installation design requirements, including anode drawing (tentative from CP conceptual or detailed design report, subsequently to be replaced by anode manufac-turer’s drawing)—design premises affecting anode installation, e.g. linepipe dimensions, type of linepipe coating, pipeline installation concept—location of anodes in relation to pipe ends and field joints(7.6.3)—any special requirements to qualification of anode installa-tion (PQT), including e.g. verification of anode integrity during pipeline installation, application of in-fill and repair of linepipe coating, as relevant (7.3)—any special requirements to quality control, e.g. use of IPS(7.2.1) and ‘daily log’ (7.4.2)—any specific requirements to handling and storage of anodes and materials for anode installation (7.5.3)—project specific requirements to final documentation, including schedule for supply (7.8.3).1.4 Structure of document1.4.1 Requirements and recommendations for detailed cathodic protection design, anode manufacturing and anode installation are contained in Sec. 5, 6 and 7, respectively. 1.5 Relation to DNV-OS-F101 and other DNV docu-ments on pipeline corrosion control1.5.1 DNV-OS-F101 “Submarine Pipeline Systems”, Sec. 8, gives general guidelines to the conceptual and detailed design of CP systems and contains some requirements and recom-mendations associated with anode manufacturing and installa-tion, in addition to pipeline coatings. Inspection of CP systems in operation is addressed in Sec. 10 of the same document. 1.5.2 DNV-RP-F106 “Factory Applied Coatings for External Corrosion Control” and DNV-RP-F102 “Pipeline Field Joint Coating and Field Repair of Linepipe External Coatings” pro-vide detailed requirements to the manufacturing of pipeline coatings.1.5.3 DNV-RP-B401 “Cathodic Protection Design” (2005) covers CP of other offshore structures than pipelines. How-ever, it is applicable for certain components of a pipeline sys-tem like those installed on manifold templates and riser bases (see 1.3.1).D ET N ORSKE V ERITASAmended April 2006Recommended Practice DNV-RP-F103, October 2003 see note on front cover Page 72. References2.1 DNV (Det Norske Veritas)2.2 EN (European Standards)2.3 ISO (International Organisation for Standardi-zation)3. Terminology and Definitions4. Abbreviations and Symbols4.1 Abbreviations4.2 Symbols for CP design parametersReferences within brackets refer to paragraphs in this docu-ment where the design parameters are defined.DNV-OS-F101Submarine Pipeline SystemsDNV-RP-B401Cathodic Protection DesignDNV-RP-F106Factory Applied External Pipeline Coatings forCorrosion ControlDNV-RP-F102Pipeline Field Joint Coating and Field Repair ofLinepipe External CoatingEN 10204 Metallic Products – Types of Inspection Docu-mentsISO 8501-1Preparation of Steel Substrate Before Applicationof Paint and Related Products – Visual Assessmentof Surface Cleanliness.– Part 1: Rust Grades and Preparation Grades ofUncoated Steel Substrates and of Steel SubstratesAfter Overall Removal of Previous Coatings. ISO 8503-2Preparation of Steel Substrates Before Applicationof Paints and Related Products – Surface Rough-ness Characteristics of Blast-Cleaned Substrates.– Part 2: Method for the Grading of Surface Profileof Abrasive Blast-Cleaned Steel– Comparator ProcedureISO 10474Steel and Steel Products – Inspection Documents ISO 10005Quality Management – Guidelines for QualityPlansISO 13847Petroleum and Natural Gas Industries- PipelineTransportation Systems – Welding of Pipelines ISO 15589-1Petroleum and Natural Gas Industries- CathodicProtection of Pipeline Transportation Systems– Part 1: Onshore Pipelines (see 1.3.1)ISO 15589-2Petroleum and Natural Gas Industries- CathodicProtection of Pipeline Transportation Systems– Part 2: Offshore Pipelines (see 1.3.1)Owner party legally responsible for design, constructionand operation of the pipelinePurchaser party (Owner or main contractor) issuing inquiry orcontract for engineering, manufacturing or installa-tion work, or nominated representative Contractor party to whom the work has been contracted shall indicates a mandatory requirementshould indicates a preferred course of actionmay indicates a permissible course of actionagreed agreement refers to a written arrangement between Purchaser and Contractor (e.g. as stated in a contract)report andnotifyrefers to an action by Contractor in writingacceptedacceptancerefers to a confirmation by Purchaser in writingcertificate certified refers to the confirmation of specified properties issued by Contractor or supplier of coating materials according to EN 10204:3.1.B, ISO 10474:5.1-B or equivalent.purchase document(s)refers to an inquiry /tender , or a purchase/contract specification, as relevantmanufacture manufacturing refers to work associated with anode manufactur-ing and installation, including qualification of aMPS (i.e. PQT) and WPSCDS Coating Data SheetCFR Coating Field RepairCP Cathodic ProtectionCR Concession RequestCRA Corrosion Resistant AlloyFJC Field Joint CoatingHISC Hydrogen Induced Stress CrackingHV Vicker HardnessIPS Installation Procedure Specification (see 7.2)ITP Inspection and Testing Plan (see 6.4.2)LAT Lowest Astronomical TideLE Liquid EpoxyMIP Manufacturing and Inspection Plan (see 6.4.2)MPS Manufacturing Procedure Specification (see 6.2)PE PolyethylenePP PolypropylenePVC PolyvinylchloridePQT Pre-Production Qualification Testing (see 6.3)RP Recommended PracticeSMYS Specified Minimum Yield StressWPQ Welding Procedure QualificationWPS Welding Procedure SpecificationA c (m²)surface area (5.2.1)a constant(5.2.7)b constant(5.2.7)D (m)linepipe outer diameter (5.6.4)d (m)linepipe wall thickness (5.6.5)E a° (V)design closed circuit anode potential (5.5.1)E c°(V)design protective potential (5.5.1)E'c (V)global protection potential (5.6.3)∆E A (V)electrolytic voltage drop (5.6.9)∆E Me (V)metallic voltage drop (5.6.3)ε (A·h/kg)anode electrochemical capacity (5.4.1)f cm mean coating breakdown factor (5.2.5)f cf final coating breakdown factor (5.3.2)f'cf mean final coating breakdown factor (5.6.4)I af (A)final anode current output (5.5.1)I c (A)current demand (5.2.1)I cm (A)mean current demand (5.2.1)I cm (tot) (A)total mean current demand (5.2.9)I cf (A)final current demand (5.3.1)I cf (tot) (A)total final current demand (5.3.1)i cm (A/m²)design mean current density (5.2.3)L (m)length of pipeline to be protected from oneanode (5.6.3)L tot (m)length of pipeline section (5.6.9)M (kg)total net anode mass (5.4.1)M a (kg)individual net anode mass (5.6.9)N number of anodes (5.5.3)R Me (ohm)metallic resistance (5.6.3)R af (ohm)anode final resistance (5.5.1)r ratio: length of cutbacks (2 off) to linepipecoating per pipe joint (5.6.4)ρMe (ohm·m)resistivity of linepipe material (5.6.5)t f (years)design life (5.2.6)u anode utilisation factor (5.4.2)D ET N ORSKE V ERITASRecommended Practice DNV-RP-F103, October 2003Amended April 2006 Page 8see note on front cover5. Cathodic Protection Detailed Design5.1 General5.1.1 The detailed design of a pipeline CP system is normally preceded by a conceptual design activity (see 1.1.3), during which the type of CP system and type of galvanic anode material to be used (i.e. unless an impressed current CP system was selected) have been defined. A concept for anode attach-ment will normally also be selected, considering requirements for the integrity of anodes during pipeline installation and pro-vision of electrical connection of anode material to the pipeline. If no CP conceptual report has been prepared, then the premises and basic concepts for detailed CP design shall be defined by Purchaser in some other reference document (see 5.1.3). This information shall be included in an inquiry (ref. 1.3.5)5.1.2 The pipeline conceptual design will normally define the generic type of pipeline coatings to be utilised for linepipe and pipeline components, and for coating of field joints. Based on this, it is common practice to carry out a preliminary calcula-tion of current demands for cathodic protection and the associ-ated total net mass of anode material required, resulting in a preliminary sizing and distribution of individual anodes (see 1.1.3).5.1.3 In addition to the conceptual CP design report (if com-pleted), the project design basis should contain all project spe-cific input parameters for the execution of detailed CP design. Purchaser should ensure that the valid revision of the design basis is available to Contractor during the design work.5.1.4 The design calculations in this section are in accordance with ANNEX A of ISO 15589-2, giving some amendments for the purpose of clarification or to facilitate selection of CP design parameters. (The above standard is sometimes referred to as “the ISO standard” or “the standard” in the text of this RP).5.1.5 All electrochemical potentials associated with CP in this section refer to the Ag / AgCl / seawater reference electrode. (The potential of this reference electrode is virtually equivalent to that of the standard calomel electrode).5.2 Calculation of mean current demand for cathodic protection5.2.1 For the detailed CP design, a pipeline should normally be divided into sections based on variations in fluid and envi-ronmental parameters (e.g. fluid temperature and burial condi-tions) that affect the ‘current demand’ I c for CP.The ‘mean current demand’, I cm (A) for a specific pipeline ‘surface area’ A c is calculated from:I cm = A c⋅ f cm⋅ i cm (1)(f cm and i cm are defined below)5.2.2 In this RP, the surface area associated with field joint coating at girth welds shall be calculated separately and the associated current demand according to equation (1) is then added to the current demand for the pipeline covered by line-pipe coating and for any pipeline components with other types of coating.Guidance note:For CP calculations, a minimum cut-back length of 0.20 m should be applied. As the surface area associated with field joints is only a few percent of the total pipe area, it is not actually nec-essary to subtract the FJC area when calculating the current demand for surfaces with linepipe coating.---e-n-d---of---G-u-i-d-a-n-c-e---n-o-t-e---5.2.3 In equation (1) above, i cm is the ‘design mean current density’, i.e. the mean cathodic current density of an assumed bare metal surface exposed to the environment; i.e. seawater or marine sediments (see Guidance Note to 5.2.4). “mean” refers to an average value for the design life.5.2.4 Table 5.1 gives recommended mean design current densities for buried and non-buried pipelines (or sections of a pipeline) as a function of the fluid temperature but independent of depth. “Buried” refers to pipeline sections to be subjected to trenching and backfilling. Pipelines (or pipeline sections) to be installed in very soft soil for which complete self-burial can be demonstrated (e.g. by calculations) may also be considered as “buried”, however, sections for which incomplete self-burial is expected shall always be considered as “non-buried” for calcu-lation of current demand. Pipeline sections without trenching but covered by rock / gravel dumping may further be consid-ered as “buried”. The design current densities in Table 5-1 are applicable for pipelines with linepipe coating and FJC / CFR as defined in DNV-RP-F106 and DNV-RP-F102, respectively. For any pipeline components or parts of pipelines designed without such coatings, default values of 0.100 A/m2 and 0.050A/m2 are recommended for non-buried and buried items, independent of surface temperature and depth. It is then presumed that any such areas constitute a minor surface area (maximum 2%) compared with the overall surface area (pipe section) to be protected. For any larger surfaces, DNV-RP-B401 is recommended for calculations of CP current demands. The design current densities in this paragraph are applicable to CRA as well as CMn-steel linepipe and ordinary C-steel.*) see definition in 5.2.4Guidance note:The design current densities in Table 5-1 are applicable inde-pendent of geographical location and depth but should be consid-ered as minimum values. Based on special considerations, the Owner/Purchaser may chose to specify higher design values than those in Table 5-1.---e-n-d---of---G-u-i-d-a-n-c-e---n-o-t-e---Guidance note:The current demand associated with cathodic protection of pipe-lines is related to “leakage” of current at pores and narrow cracks or crevices in the coating, primarily in connection with field joints. Hence, there is no direct exposure of steel surfaces to sea-water and the temperature at the metal / electrolyte interface is close to that of the internal fluid temperature. The cathodic current is then primarily related to hydrogen evolution, even for unburied pipeline sections, whilst reduction of dissolved oxygen has a minor contribution to the cathodic reaction. As a conse-quence, seawater parameters affecting oxygen supply (e.g.dissolved content of oxygen and seawater flow), hydrostatic pressure and seawater ambient temperature are less important.The cathodic current is primarily determined by diffusion and migration processes in the pores and crevices and the electrolytic resistivity. For pipelines operating above ambient seawater temperature, the temperature of the internal fluid, having a major effect on diffusion/migration processes and electrolytic conduc-tivity, is the decisive factor for the current demand.---e-n-d---of---G-u-i-d-a-n-c-e---n-o-t-e---5.2.5 f cm in equation (1) is a dimensionless factor (≤1) termed ‘mean coating breakdown factor’, describing the assumed capability of the coating to reduce the current demand for cathodic protection. (See also Guidance Notes to 5.2.7, 5.3.1 and 5.3.2). “mean” refers to an average value for the design life.Table 5-1 Recommended design mean current densities(in A/m2) as a function of internal fluid temperature ExposureConditionInternal Fluid Temperature (°C)≤ 50>50 - 80>80 - 120>120 Non-Buried*)0.0500.0600.0700.100 Buried*)0.0200.0250.0300.040D ET N ORSKE V ERITAS。
FLOW-3D-V9-边界设置 ppt课件

40
2021/3/26 FLOW-3D-V9-边界设置 ppt课件
41
2021/3/26 FLOW-3D-V9-边界设置 ppt课件
42
2021/3/26 D-V9-边界设置 ppt课件
43
2021/3/26 FLOW-3D-V9-边界设置 ppt课件
20
2021/3/26 FLOW-3D-V9-边界设置 ppt课件
21
2021/3/26 FLOW-3D-V9-边界设置 ppt课件
22
2021/3/26 FLOW-3D-V9-边界设置 ppt课件
23
2021/3/26 FLOW-3D-V9-边界设置 ppt课件
24
2021/3/26 FLOW-3D-V9-边界设置 ppt课件
幼儿园园长擅长收集资料在幼儿教育一线工作多年
FLOW-3D-V9-边界设置
FLOW-3D V9.3
2021/3/26 FLOW-3D-V9-边界设置 ppt课件
2
3
2021/3/26 FLOW-3D-V9-边界设置 ppt课件
4
2021/3/26 FLOW-3D-V9-边界设置 ppt课件
5
30
2021/3/26 FLOW-3D-V9-边界设置 ppt课件
31
2021/3/26 FLOW-3D-V9-边界设置 ppt课件
32
2021/3/26 FLOW-3D-V9-边界设置 ppt课件
33
2021/3/26 FLOW-3D-V9-边界设置 ppt课件
34
2021/3/26 FLOW-3D-V9-边界设置 ppt课件
25
2021/3/26 FLOW-3D-V9-边界设置 ppt课件
Fluent软件的介绍

第一章Fluent 软件的介绍fluent 软件的组成:软件功能介绍:GAMBIT 专用的CFD 前置处理器(几何/网格生成) Fluent4.5 基于结构化网格的通用CFD 求解器 Fluent6。
0 基于非结构化网格的通用CFD 求解器 Fidap 基于有限元方法的通用CFD 求解器 Polyflow 针对粘弹性流动的专用CFD 求解器 Mixsim 针对搅拌混合问题的专用CFD 软件 Icepak专用的热控分析CFD 软件软件安装步骤:step 1:首先安装exceed软件,推荐是exceed6。
2版本,再装exceed3d,按提示步骤完成即可,提问设定密码等,可忽略或随便填写。
step 2: 点击gambit文件夹的setup.exe,按步骤安装;step 3: FLUENT和GAMBIT需要把相应license.dat文件拷贝到FLUENT。
INC/license目录下;step 4:安装完之后,把x:\FLUENT.INC\ntbin\ntx86\gambit。
exe命令符拖到桌面(x为安装的盘符);step 5: 点击fluent源文件夹的setup.exe,按步骤安装;step 6: 从程序里找到fluent应用程序,发到桌面上。
注:安装可能出现的几个问题:1.出错信息“unable find/open license.dat”,第三步没执行;2.gambit在使用过程中出现非正常退出时可能会产生*。
lok文件,下次使用不能打开该工作文件时,进入x:\FLUENT.INC\ntbin\ntx86\,把*.lok文件删除即可;3.安装好FLUENT和GAMBIT最好设置一下用户默认路径,推荐设置办法,在非系统分区建一个目录,如d:\usersa) win2k用户在控制面板-用户和密码-高级-高级,在使用fluent用户的配置文件修改本地路径为d:\users,重起到该用户运行命令提示符,检查用户路径是否修改;b) xp用户,把命令提示符发送到桌面快捷方式,右键单击命令提示符快捷方式在快捷方式-起始位置加入D:\users,重起检查.几种主要文件形式:jou文件—日志文档,可以编辑运行;dbs文件-gambit工作文件;msh文件—从gambit输出得网格文件;cas文件—经fluent定义后的文件;dat文件-经fluent计算数据结果文件。
中科大Fluent教程 第四章,边界条件
计算流体与传热传质
概述
进口与出口边界 速度
速度及其分布 湍流参数
压力边界条件 and others... 壁面, 对称, 周期性和轴Axis边界 内部区域
流体(Fluid)
多孔介质(Porous Media) 移动区域(Moving Cell Zones)
?回流区?流动方向有明显压力梯度?下游影响上游流动outflowconditionillposedoutflowconditionnotobeyedoutflowconditionobeyedoutflowconditioncloselyobeyed计算流体与传热传质xy012345600102030405060708计算流体与传热传质多出口边界条件数值模拟?应用outflow边界条件的前提
Boundaries and internal surfaces are represented by face zones. Boundary data are assigned to face zones.
orifice
(interior)
orifice_plate and orifice_plate-shadow
固体(Solid) 内部边界
计算流体与传热传质
Overview
边界条件: 边界条件决定流动. 数学模型求解的需要.
给定进入计算区域的流率或通量. 如 mass, momentum, 和 energy
Fluid/Solid regions represented by cell zones. Material and Source terms are assigned to cell zones.
四阶交叉耦合广义切比雪夫带通滤波器的设计

四阶交叉耦合广义切比雪夫带通滤波器的设计四阶交叉耦合广义切比雪夫带通滤波器的设计【摘要】利用Matlab和HFSS设计了一个四阶交叉耦合广义切比雪夫滤波器,文中详细介绍了设计步骤,设计出的滤波器中心频率为2.60 GHz,通带内的回波损耗为15dB,通带相对带宽FBW=6%,传输零点位置在2.485 GHz和2.72GHz。
【关键词】交叉耦合;滤波器;传输零点一、引言随着滤波器的指标要求越来越高,高选择性、小尺寸的滤波器变得十分重要[1]。
通常在不相邻的谐振腔之间引入额外的交叉耦合,在阻带产生有限传输零点,以此来增加截止频率的陡度,提高滤波器的优越性。
这种耦合谐振器滤波器的综合和设计已得到广泛的研究[2]。
二、设计过程本文介绍了四阶交叉耦合广义切比雪夫滤波器的设计,在FR-4的介质基片上设计滤波器,介质基片的介电常数为,基片厚度为0.8mm,介质的损耗角正切为0.01。
滤波器的设计指标为:滤波器中心频率2.60 GHz,通带内的回波损耗为15dB,通带相对带宽FBW=6%,预设传输零点位置在2.485 GHz和2.72GHz。
滤波器采用四阶规范结构,耦合拓扑结构如图1所示。
通过谐振器1至4的交叉耦合产生一对关于中心频率对称的传输零点以提高通带边缘的选择性[3]。
滤波器由三节不同阻抗传输线构成的谐振器组成的2×2阵列构成,相邻谐振器通过边缘场耦合。
基本谐振模式时,电场最强处位于谐振器低阻耦合线开路端附近,磁场最强处位于谐振器的高阻抗线附近。
当两个耦合谐振器的低阻耦合线节非常接近时,谐振器对主要通过边缘电场耦合。
当两个谐振器的高阻线节靠近时,谐振器对主要通过边缘磁场耦合。
谐振器对在其余位置分布时,电场和磁场耦合同时存在,此时为混合耦合。
由于交叉耦合幅度远小于直接耦合幅度,而边缘电场随距离衰减大于边缘磁场随距离衰减,故使用电场耦合实现交叉耦合系数,谐振器之间的直接耦合由磁场耦合和混合耦合实现。