智林STM32开发板上实现的简单人机界面
基于STM32单机的扫地机器人设计
基于STM32单机的扫地机器人设计1. 引言1.1 背景介绍扫地机器人是一种能够自动清扫地面垃圾和灰尘的智能机器人,广泛应用于家庭、办公室和公共场所等各类环境。
随着人们生活水平的不断提高,对于清洁卫生的要求也越来越高,扫地机器人因其高效、方便、智能的特点而备受人们青睐。
随着科技的不断进步,基于STM32单片机的扫地机器人正逐渐成为研究和开发的热点之一。
STM32单片机具有低功耗、高性能、丰富的外设资源等优点,在嵌入式系统开发中得到广泛应用。
借助STM32单片机的强大功能和稳定性,扫地机器人设计师们可以实现更加智能化和高效化的设计。
本文将详细介绍基于STM32单片机的扫地机器人设计,包括系统架构设计、功能模块设计、传感器选择与应用以及控制系统设计等方面。
通过对这些内容的深入探讨,可以更好地了解基于STM32单片机的扫地机器人设计原理和技术实现,为今后的研究和应用提供参考和借鉴。
1.2 研究意义智能扫地机器人已经成为现代家居中不可或缺的清洁助手。
随着人们生活水平的不断提高以及工作节奏的加快,人们对家庭清洁的需求也越来越迫切。
而基于STM32单机的扫地机器人设计,可以更好地满足人们对高效清洁的需求。
研究意义在于提高家庭清洁的效率和质量,解放人们的双手,让他们可以更多地投入到工作和生活中。
通过对传感器及控制系统的研究与应用,可以使扫地机器人具备更加智能化的功能,可以更好地适应不同家庭环境,并具有更多的人性化设计,使其成为人们的贴心家务助手。
基于STM32单机的扫地机器人设计,还具有较高的可扩展性和灵活性,可以满足不同家庭对清洁需求的差异化需求。
本研究具有重要的实用意义和市场前景,可以为智能家居领域的发展贡献力量。
1.3 研究目的研究目的是为了通过基于STM32单机的扫地机器人设计,提高家庭和办公环境的清洁效率,减轻人力劳动的负担。
通过研究和设计扫地机器人,可以实现智能化的清洁服务,提高家庭生活质量和办公效率。
使用STM32 设计HMI_综述_V1.2_20170307

• 支持Motion JPEG视频
• 动画显示厂家LOGO或商标增强用户体验 • 产品可以嵌入动画教程
更快 x2.50
STM32 F769I 200 MHz 硬件JPEG
STM32 F769I 200 MHz 软件JPEG
* : 每秒帧数
视频演示 – JPEG编解码器
24
谢谢!
25
更多信息请访问我们的官方网站 /stm32
BOM成本风险
功耗风险
最佳平衡
智能家居应用
14 : 21
4
ALARM
-
5C
STM32GUI方案可以做到软件和 硬件的平衡
STM32GUI方案可以做到软件和硬件的平衡
LCD接口&存储 系统性能 图形库
6
SPI+ FMC/FSMC LTDC MIPI DSI
CACHE
Chrom-ART™ JPEG CODEC
绿[7:0]
同步和时序产生器
蓝[7:0]
LTDC提供RGB接口驱动裸屏
LCD面板
图层2
混合
行同步 场同步
完备的外设满足不同接口 --MIPI-DSI
12
Cortex-M4 ART Chrom-ART
LCD-TFT CTRL
DPI eDPI
DSI显示 (带或不带控制器和显存)
DSI
DBI Host
PPI
14 : 21
8
完备的LCD外设接口
ALARM
-5C
FSMC/FMC
MIPI-DSI
LTDC
SPI
CACHE
丰富的LCD接口
STM32 MCU
(Chrom-ART Accelerator)
智嵌STM32F107网络互联开发板V3.0实验例程操作手册

北京智嵌物联网电子技术ISTM32F107网络互联开发板3.0实验例程操作手册版本号:A拟制人:赵工时间:2013年7月1日目录1本文档编写目的 (1)2实验例程操作说明 (1)2.1LED闪烁实验 (1)2.2KEY_LED实验 (1)2.3RS232通讯实验 (1)2.4RS485通讯实验 (2)2.5CAN1通讯实验 (2)2.6CAN1与CAN2通讯实验 (3)2.7I2C实验—读写24c04 (4)2.8SPI通讯实验--读写SST2508B (5)2.9TCP服务器收发数据实验 (5)2.10动态IP实验 (7)2.11HTTP网页服务器实验 (7)2.12USB数据存储实验1(读写STM32F107片内flash) (9)2.13USB数据存储实验2(读写板载SST25F08B) (9)2.14U盘读写实验 (9)2.15USB鼠标实验 (11)2.16USB_JoyStickMouse实验 (11)2.17 2.4G无线模块NRF24l01通信实验 (12)2.18基于NRF24L01的无线RS232通讯实验 (12)2.19DS18B20温度试验 (13)2.20UDP客户端发送数据实验 (14)2.21UDP服务器收发数据实验 (15)2.22TCP客户端收发数据实验 (18)2.2316通道ADC采集实验 (21)2.24UDP与RS232RS485双向数据透明传输例程---开发板做服务器 (23)2.25TCP与RS232RS485双向数据透明传输实验 (23)2.26TCP与CAN双向数据透明传输实验 (23)1本文档编写目的本手册是针对STM32F107网络互联开发板V2.2的例程而编写的,包括每个实验例程的实验原理、实验步骤、注意事项等。
2实验例程操作说明2.1LED闪烁实验实验原理:通过控制PE2/PE3/PE4/PE5的电平变化实现LED灯的亮灭。
实验步骤:(1)用Keil uVision4打开LED灯闪烁实验工程,并编译。
基于stm32的人形机器人制作
摘要:变形机器人是机器人领域中新兴起的一个研究方向,同时也是当前机器人学研究领域的一个热点和难点。
本课题参照人体骨骼结构并综合考虑运动中模块间的碰撞、结构变化步数以及车型状态等因素,为机器人设计精确构型。
基于机器人结构设计,详细探讨本项目变形机器人人车变形过程,具体展示不同构型的特点及相互之间的转换和衔接,打破变形机器人研究局限,推进本领域关键技术的突破。
本文我们主要对机电一体化产品-变形金刚机器人进行了系统设计,该变形机器人旨在满足四五岁儿童对于变形金刚机器人玩具的需求,可在战车和机器人之间变换,并且各变形处的机构变换设计巧妙,变换的多变性、趣味性和实用性都非常高,在战车和变形后机器人的外观上极为逼真、酷炫,对儿童极具吸引力。
我们首先对市场前景进行了调查和分析,之后查阅相关资料并进行分析,随后进行机器人方案设计及具体的机械结构设计,并绘制机器人总装图和关键零部件图,然后进行传感与控制方案设计,包括硬件与软件设计,试验测试,最后编制课程设计说明书。
本文对于硬件电路的连接和软件控制方面进行了详细的阐明,完成变形金刚机器人变形、行走的功能,并实现无线通讯功能。
目录第一章方案设计 (6)1 机械结构方案设计 (6)2 驱动方案选择 (7)2.1 电机的选择 (7)3 传感器的选择 (7)4 结构的合理性和参数的合理性 (8)第二章动作的总体规划详细方案 (9)1 人形态下的行走设计 (9)2 车形态下的运动设计 (9)3 人车转换的变形设计 (9)第三章软件系统设计 (10)1 软件系统总体方案 (10)2 控制方案与流程 (11)第四章程序 (12)第五章项目心得 (14)第一章方案设计1机械结构方案设计本次任务主要对我们的机电一体化产品-变形金刚机器人进行了系统设计,实现自动变形。
外部机械结构包括作为战车整体外观的躯壳和车顶,用于连接躯壳以及车顶的支架,与支架连接组成战车车头的两个车头灯以及引擎盖,与支架上端连接的头部,与支架中部连接的两条手臂以及与支架下端连接的两条腿,安装于二条手臂上的前轮以及安装于二条腿上的后轮。
第6章 人机界面——按键输入与液晶显示[44页]
![第6章 人机界面——按键输入与液晶显示[44页]](https://img.taocdn.com/s3/m/a7bd3afeb0717fd5360cdca6.png)
延时法——
就是按照时序要求通过延时函数实现各种时序关系,也就是通
过延时以等待“忙”状态结束
优点:简单
缺点:在时序要求较高的场合,有可能会出现意外、失常
2
查询状态法——
通常情况下,功能模块大多会提供一个“忙”状态信号或引脚,
可以随时获取该模块的当前状态
如果是“忙”状态,则不能对它进行写入操作,否则,可以进
B0H、B1H、B2H、B3H、B4H、B5H、B6H、B7H、B8H、B9H、BAH、BBH、BCH、BDH、BEH、BFH
黄色部分对应上半屏显示 白色部分对应下半屏显示
对应一屏显示
第一行:80H、81H、82H、83H、84H、85H、86H、87H 第二行:90H、91H、92H、93H、94H、95H、96H、97H 第三行:88H、89H、8AH、8BH、8CH、8DH、8EH、8FH 第四行:98H、99H、9AH、9BH、9CH、9DH、9EH、9FH
模块的PSB脚在模块上直接焊接为低电平端(串行方式)
模块的RST脚可以不接
液晶模块的电源和背光使用+5V电源
STM32与液晶模块12864的接口实现——延时法
STM32与液晶模块12864的软件接口——初识12864
1
对12864的操作——
——读忙状态(同时读出指针地址内容),初始化之后每次对12864
的读写均要进行忙检测
——写命令:所有的命令可以查看指令表。写地址也是写指令
——写数据:操作对象有DDRAM、CGRAM、GDRAM
——读数据:操作对象也是DDRAM、CGRAM、GDRAM
DDRAM、CGRAM、GDRAM——
DDRAM:(Data Display Ram),数据显示RAM,往里面写啥,屏幕
基于STM32的便携式人机界面系统
Ke r s: oa tt n;AR mi rc n r l r T 2;T T l u d cy tl u n ma h n n e a e y wo d t tl a i s o M co o t l ;S M3 oe F i i r sa ;h ma — c i e it r c q f
第 l 9卷 第 5期
V0 . 9 11
No5 .
电子设 计 工程
Elc r n c De i n En ie rn e to i sg gn e i g
2 1 年 3月 01
Mfr 2 1 l . 0l l f
基才 S M3 T 2的便携 式人机 界 面 系统
邸 兴 ,陈 贝 韩 俊 ,
持 计 算 系统 , 完 成 实 时 的 测 量 要 求 , 这 一 系 统 中 中 文 人 来 而 机 界 面成 为 一 种 事 实 上 的 行 业标 准 。 现显 示 汉 字 的 T 液 实 丌 晶 和 可 输 入 数 字 的小 键 盘 已成 为 智 能 设 备 必 不 可 少 的组 成 部 分 。同 时作 为便 携 式 设 备 基 本 要求 的低 功 耗 特 性 也 贯 穿 于
在 全 站 仪 应 用 于 飞机 的测 量过 程 中 ,常 会涉 及 到 计 算 ,
以 满 足 不 同 的 应 用 环 境 与 测 量 要 求 . 往 的 方式 是测 量后 期 以 编 辑 软 件 在 计 算 机 上 实 现 。 代 测 量 迫 切 需 要 一 种 便 携 式 手 现
处 理 器 。 由 于 S M3 F 0 R T T 2 13 B 6不 带 有 MC 所 以 采用 软件 . 模 拟 总 线 的 方法 , 成 对 液 晶模 块 的驱 动 。 完
STM32的小型仿人机器人控制系统设计
基于stm32简易人机界面设计
基于STM32的便携式人机界面系统(出自)人机界面系统STM32处理器总线时序在全站仪应用于飞机的测量过程中,常会涉及到计算,以满足不同的应用环境与测量要求,以往的方式是测量后期编辑软件在计算机上实现,现代测量迫切需要一种便携式手持计算系统,来完成实时的测量要求,而这一系统中中文人机界面成为一种事实上的行业标准。
实现显示汉字的TFT液晶和可输入数字的小键盘已成为智能设备必不可少的组成部分。
同时作为便携式设备基本要求的低功耗特性也贯穿于中文人机界面的设计始终。
这种低功耗中文人机交互界面需要在选取处理器和具体元器件上有特殊考虑。
微功耗、高性能应作为选择相关器件的首要要求。
本文选用了意法半导体公司基于ARM最新Cortex—M3内核的STM32F103RB作为主控芯片,通过选择合适的液晶模块,构建了一个高性能低功耗的中文人机界面系统。
1 系统的工作原理本系统以STM32F103RBT6为核心,采用晶彩光电的AM240320TFT液晶屏作为显示器,完成内容的显示,由于STM32F103RBT6内部Flash为128 K,如果用来储存汉字字库,对芯片资源是一种极大的浪费,所以本文中采用微控制器外挂SPI接口Flash的设计思路,将不用重复改变的中文字库存放在外部Flash芯片里面,需要时再通过SPI口调入处理器。
由于STM32F103RBT6不带有FSMC,所以采用软件模拟总线的方法,完成对液晶模块的驱动。
2 系统硬件设计2.1 供电部分电路由于整个系统采用3.3 V供电,所以必须外部稳压电路将电压稳定到3.3 V,本设计中采用三端稳压芯片LM1117-3.3,将外部电池电压稳定为3.3 V位系统提供电源,为处理器、液晶显示器、SPI Flash供电,采用二极管IN4007串接在电源正极,为系统提供电源反接保护。
供电部分原理图如图1所示。
2.2 液晶显示部分电路设计液晶显示部分主要由微控制器驱动液晶显示模块完成人机界面状态的显示,通过发送命令字,完成液晶模块的初始化以及汉字的显示。
人机界面简单使用技巧

人机界面简单使用技巧人机界面是人与机器之间的交互界面,通过该界面可以实现人对机器的操作和控制。
使用人机界面时,我们应该掌握一些简单的使用技巧,以便更加高效地完成任务。
首先,我们需要熟悉不同人机界面的布局和功能。
不同的机器会有不同的人机界面,比如电脑的桌面界面、手机的操作界面等。
在我们开始使用之前,可以先观察界面的各个部分,了解每个功能的作用,为后续的操作做好准备。
其次,我们需要掌握一些常用的操作技巧。
比如,在电脑的桌面界面上,我们可以使用鼠标来点击、拖拽、双击等操作;在手机的操作界面上,我们可以使用手指来滑动、点击、捏合等操作。
掌握这些基本的操作技巧可以让我们更加流畅地进行各种操作。
另外,我们还可以通过快捷键来快速地完成一些常用的操作。
比如,在电脑上可以使用Ctrl+C来复制选中的文本,使用Ctrl+V来粘贴已复制的内容;在手机上可以使用双击屏幕顶部来快速返回顶部,使用双击屏幕底部来快速返回底部等。
熟练掌握这些快捷键可以让我们的操作更加高效。
此外,我们还可以根据自己的需要对人机界面进行个性化设置。
比如,在电脑上可以更改桌面的壁纸、图标的大小和位置等;在手机上可以更改主题、布局等。
通过个性化设置,我们可以将界面调整到自己最舒适的状态,提高操作的效率。
最后,我们还需要注意一些基本的使用注意事项。
比如,在操作界面上不要频繁点击同一个按钮,以免造成界面的卡顿;在使用快捷键时要确保按下的键是正确的,以免造成误操作。
此外,我们还要注意保存重要的操作和数据,以防止意外情况的发生。
总的来说,通过掌握人机界面的使用技巧,我们可以更加熟练、高效地操作机器,提高工作和学习的效率。
除了上述提到的一些基本技巧,我们还可以通过使用帮助文档、参加培训等方式来深入了解人机界面的更多功能和操作方法。
只有不断学习和熟练掌握,我们才能真正成为人机界面的使用高手。
基于stm32的人机交互终端的设计
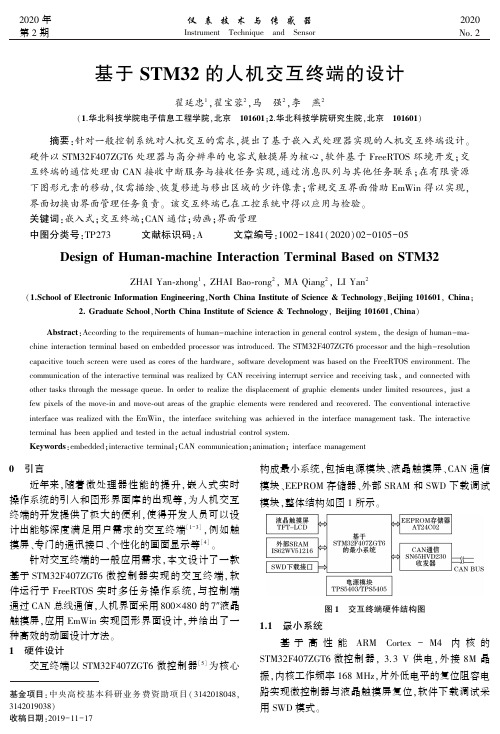
㊀2020年㊀第2期仪表技术与传感器Instrument㊀Technique㊀and㊀Sensor2020㊀No 2㊀基金项目:中央高校基本科研业务费资助项目(3142018048,3142019038)收稿日期:2019-11-17基于STM32的人机交互终端的设计翟延忠1,翟宝蓉2,马㊀强2,李㊀燕2(1.华北科技学院电子信息工程学院,北京㊀101601;2.华北科技学院研究生院,北京㊀101601)㊀㊀摘要:针对一般控制系统对人机交互的需求,提出了基于嵌入式处理器实现的人机交互终端设计㊂硬件以STM32F407ZGT6处理器与高分辨率的电容式触摸屏为核心,软件基于FreeRTOS环境开发;交互终端的通信处理由CAN接收中断服务与接收任务实现,通过消息队列与其他任务联系;在有限资源下图形元素的移动,仅需描绘㊁恢复移进与移出区域的少许像素;常规交互界面借助EmWin得以实现,界面切换由界面管理任务负责㊂该交互终端已在工控系统中得以应用与检验㊂关键词:嵌入式;交互终端;CAN通信;动画;界面管理中图分类号:TP273㊀㊀㊀文献标识码:A㊀㊀㊀文章编号:1002-1841(2020)02-0105-05DesignofHuman⁃machineInteractionTerminalBasedonSTM32ZHAIYan⁃zhong1,ZHAIBao⁃rong2,MAQiang2,LIYan2(1.SchoolofElectronicInformationEngineering,NorthChinaInstituteofScience&Technology,Beijing101601,China;2.GraduateSchool,NorthChinaInstituteofScience&Technology,Beijing101601,China)Abstract:Accordingtotherequirementsofhuman-machineinteractioningeneralcontrolsystem,thedesignofhuman-ma⁃chineinteractionterminalbasedonembeddedprocessorwasintroduced.TheSTM32F407ZGT6processorandthehigh-resolutioncapacitivetouchscreenwereusedascoresofthehardware,softwaredevelopmentwasbasedontheFreeRTOSenvironment.ThecommunicationoftheinteractiveterminalwasrealizedbyCANreceivinginterruptserviceandreceivingtask,andconnectedwithothertasksthroughthemessagequeue.Inordertorealizethedisplacementofgraphicelementsunderlimitedresources,justafewpixelsofthemove⁃inandmove⁃outareasofthegraphicelementswererenderedandrecovered.TheconventionalinteractiveinterfacewasrealizedwiththeEmWin,theinterfaceswitchingwasachievedintheinterfacemanagementtask.Theinteractiveterminalhasbeenappliedandtestedintheactualindustrialcontrolsystem.Keywords:embedded;interactiveterminal;CANcommunication;animation;interfacemanagement0㊀引言近年来,随着微处理器性能的提升,嵌入式实时操作系统的引入和图形界面库的出现等,为人机交互终端的开发提供了极大的便利,使得开发人员可以设计出能够深度满足用户需求的交互终端[1-3],例如触摸屏㊁专门的通讯接口㊁个性化的画面显示等[4]㊂针对交互终端的一般应用需求,本文设计了一款基于STM32F407ZGT6微控制器实现的交互终端,软件运行于FreeRTOS实时多任务操作系统,与控制端通过CAN总线通信,人机界面采用800ˑ480的7ᵡ液晶触摸屏,应用EmWin实现图形界面设计,并给出了一种高效的动画设计方法㊂1㊀硬件设计交互终端以STM32F407ZGT6微控制器[5]为核心构成最小系统,包括电源模块㊁液晶触摸屏㊁CAN通信模块㊁EEPROM存储器㊁外部SRAM和SWD下载调试模块,整体结构如图1所示㊂图1㊀交互终端硬件结构图1.1㊀最小系统基于高性能ARMCortex-M4内核的STM32F407ZGT6微控制器,3.3V供电,外接8M晶振,内核工作频率168MHz,片外低电平的复位阻容电路实现微控制器与液晶触摸屏复位,软件下载调试采用SWD模式㊂㊀㊀㊀㊀㊀106㊀InstrumentTechniqueandSensorFeb 2020㊀1.2㊀电源模块交互终端外部接入24VDC,其内部电路需要5V和3.3V的两种电源供电,其中5V为液晶触摸屏的背光供电,而3.3V为微控制器和其他模块供电的主电源㊂输入24VDC经TPS5403单片降压稳压器转换输出电压/电流为3.3V/710mA,经TPS5405单片降压稳压器转换输出电压/电流为5V/500mA㊂1.3㊀触摸屏㊁SRAM与EEPROM显示屏选用了7ᵡ彩色TFT-LCD电容触摸屏,分辨率为800ˑ480,16位彩色显示,驱动芯片为SSD1963,触屏驱动芯片为FT5206㊂由于STM32F407ZGT6片内SRAM容量仅192KB,难以支撑画面显示需求,为此外扩一片1MSRAM的IS62WV51216芯片㊂STM32F407ZGT6以FSMC方式与TFTLCD模块及外部SRAM接口,使用FSMC_NE3片选TFTLCD模块,使用FSMC_NE4片选SRAM芯片,微控制器以IIC接口驱动触屏芯片[6]㊂交互终端应用中会有参数掉电记忆的需求,为此电路中加入EEPROM芯片,这里选用IIC接口的AT24C02㊂1.4㊀CAN通信STM32F407ZGT6内置bxCAN(基本扩展CAN)控制器,波特率最高达1Mbps,CAN总线驱动选用总线收发器SN65HVD230,该芯片具有差分收发能力和良好抗干扰能力,适用于较高通讯速率与高可靠性的CAN总线通信[7]㊂2㊀软件设计2.1㊀软件功能2.1.1㊀CAN通信交互终端界面上显示的信息来源于其服务的控制系统,而控制参数与行为又反作用于其服务的系统,信息的传输通过CAN通信实现,CAN信息的收发及处理需通过交互终端的软件功能实现㊂2.1.2㊀动画显示人机界面是一个控制系统的窗口,除常规的参数与状态显示外,参数与状态驱动的动画显示可显著提升界面表现力,而动画实现的本质是在短时间内(<20ms)实现画面像素的改变与刷新,由于嵌入式系统的资源有限,动画显示功能需得到高效处理㊂2.1.3㊀界面管理交互终端要展现的就是界面,一方面展示控制系统的运行状态与参数,将参数与状态信息在选择的位置,以设定颜色㊁大小㊁字体等属性显示出来;另一方面,控制参数与命令的设置与显示,除完成相关信息的显示外,参数设置界面还涉及到按钮操作㊁对话框等窗口操作;此外还涉及触屏的驱动与检测㊂2.2㊀操作系统本设计采用FreeRTOS操作系统,将系统功能划分为若干个任务㊁合理设置任务优先级㊁选择适当的同步与通信机制使得软件结构清晰㊁模块化㊁容易维护[8]㊂2.3㊀GUI图形库EmWin专为LCD图形界面提供了模块化设计并且适用于多任务操作环境,除可实现基本图形绘制㊁颜色填充㊁图片文字的显示外,它的强大功能表现在丰富的可直接调用的接口函数㊁窗口管理功能等,借助GUI开发工具EmWin进行人机界面的开发可有效地提升开发效率[9]㊂2.4㊀任务架构综合上述因素,构建软件总体框架如图2所示㊂图2㊀软件总体框架触屏检测任务用于各界面的触屏检测管理,当点击界面上的按钮(或图标)时,产生相应的标志,通知界面管理任务;CAN接收及接收中断服务用于CAN总线信息接收;界面的切换与交互操作由界面管理任务实现;实时显示任务用于实时数据及状态的更新显示;动画任务用于监控界面的同步动画显示㊂3㊀CAN通信本交互终端通过CAN总线与控制装置进行通信,一方面接收控制装置发来的信息,将信息以某种形式记录或显示在界面上㊂另一方面,交互终端接受人工操作并将操作信息发往控制终端㊂在RTOS运行环境下,交互终端会有多个任务,任务间的通信可通过信号量㊁事件标志组㊁消息队列等方式实现㊂CAN通信按照如下思路实现㊂3.1㊀通信任务的规划在RTOS的多任务运行环境下,CAN总线通信需㊀㊀㊀㊀㊀第2期翟延忠等:基于STM32的人机交互终端的设计107㊀㊀根据信息接收与发送的特点与过程来处理,为便于处理,设立多个任务处理CAN通信㊂中断服务程序:总线通讯时,信息的接收是被动的,时间上是随机的,为不致接收信息的溢出或丢失,CAN信息的接收采用中断方式,在中断服务程序中快速完成信息的接收与转发,以减少对CPU时间的占用㊂CAN接收任务:对接收信息需进行解析以进行相应的处理㊂CAN信息的发送:相对于信息接收,信息的发送是主动的,当某个任务需要向CAN总线发送信息时,将信息按设定格式装配好,调用库函数u8CANx_Send_Msg(u8∗msg,u8len)即可㊂3.2㊀CAN控制器的初始化CAN通信初始化除引脚设置㊁时钟使能㊁波特率设置㊁中断设置外,还需注意:3.2.1㊀过滤器设置当CAN总线上节点较多时,传输的信息也会增多,为不使交互终端受到无关信息的干扰,CAN提供了28个过滤器,每个过滤器有标识符列表与标识符屏蔽位两种模式㊂标识符列表要求列出所有可接收的ID,只有与这些ID完全相同的数据帧或远程帧才能通过过滤被接收㊂而屏蔽位模式可将ID的某些位按位屏蔽,从而可过滤出一组ID来㊂在CAN初始化时,需根据通信的内容设置过滤模式㊂3.2.2㊀接收队列的选择STM32F407ZGT6的CAN控制器具有2个三级缓冲的FIFO,具有强大的缓冲接收能力,降低了处理器接收CAN信息时的负担㊂每个过滤器在设置时,可选择关联的FIFO,从而使所接收的信息得以按照ID分流㊂3.3㊀接收中断服务初始化后,每当CAN总线上有信息帧能够通过ID过滤进入FIFO,就会触发中断(FIFO内消息非空时中断)㊂中断服务中,首先识别哪个FIFO产生中断,将信息帧读出,然后立即将信息存入接收消息队列㊂3.4㊀CAN接收处理CAN接收任务用于消息的解析与处理,程序流程图如图3所示㊂首先检查消息队列是否为空,消息队列内的消息来自于接收中断服务㊂若不为空,将接收消息中的数据读取到数据缓冲区,提取其中蕴含的消息类型信息MSG_Type㊂然后根据消息类型,对接收到的信息按约定做出相应的解析,并通过适当的方式通知其他任务进行处理㊂图3㊀CAN接收任务流程图4㊀动画处理人机交互终端的作用就是要提供友好的人机界面,而其中的监控界面是控制系统人机界面开发的重点,与系统运行状态相联系的动画功能是焦点㊂动画是指受控图形按照一定规律在画面上运动,以形象表现系统某些受控属性,动画显示对提高人机交互界面乃至整个系统的品质有作用㊂4.1㊀动画原理最基本的动画表现形式为图形的移动与旋转,而实际的动画效果多是由各种图元的运动组合,其基本原理是使图形每隔一定时间移动或旋转一定的像素,将各种图形移动组合在一起就可以获得表现系统运动特质的动画效果,所移动的像素可由所关联的变量加以确定㊂当要在显示屏上呈现图形的移动或旋转效果时,需要做以下工作:描绘新增区域的像素;恢复原被掩盖区域的像素㊂这些工作本质上都是像素描绘㊂4.2㊀描绘问题由于显示屏的像素描绘是逐点进行的,每个像素点的描绘需要指定像素坐标,发出写GRAM命令,然后再输出颜色信息这一操作过程㊂作为外设的显示屏,其访问速度相对处理器内部指令执行速度要慢得多,使得每个像素点的描绘需要耗用处理器很多的指令执行时间㊂当要实现一个图形的移动效果时,如果整个图形全部擦除后再在新的位置重新描绘图形的㊀㊀㊀㊀㊀108㊀InstrumentTechniqueandSensorFeb 2020㊀所有像素,要消耗处理器很长时间,不仅画面的观感会有闪烁,而且也会挤压其他应用代码的运行时间,尤其在处理器负荷较重时㊂4.3㊀有效描绘由于在每帧画面的图形移动过程中只是部分区域的像素发生了改变,即移进区域需新绘和移出区域需恢复原覆盖的显示㊂如果仅对变化的像素点进行描绘,而不是将整个图形擦除后在新的位置上进行重绘,减少了对CPU时间的消耗,从而改善画面动画效果㊂以一个填充矩形的水平移动为例,设矩形的像素数为x(U)∗y(V),如果按简单的擦掉重绘的方式,需要描绘2xy个像素㊂实际图形在平面移动中,如果移动Δx个像素,需重绘的像素为2yΔx个,而中间的(x-Δx)y像素没有变化,不需要重绘㊂如图4所示:由于Δx很小,需重绘的像素量大幅降低,从而大幅节省了处理器的时间㊂图4㊀图形移动像素变更示意图一个人机界面由若干个图形元素合成,当一个移动图形掠过不同的图形元素时,移出的区域就要恢复成原来被掩盖的图形元素像素,需要判断像素恢复点属于哪个可显示的图形,这将增加像素描绘的复杂性,使描绘时间加长㊂因此,应尽可能使移动图形在一个单色背景中移动,以简化软件的设计㊂5㊀界面管理人机交互终端除了实现控制系统的监控画面外,还需要若干的参数(或状态)的显示/设置界面,用以实现参数设置㊁数据统计㊁状态指示与设置等功能㊂内容涉及按钮的操作㊁参数与图形的显示㊁对话框操作等[10],开发这类的界面是耗时与繁琐的,利用EmWin的图形界面库可使这类开发的工作量显著降低㊂具体地,利用EmWin附带的GUIBuilder工具创建界面㊂GUIBuilder是一款无需编程即可创建对话框的工具,它提供了丰富的控件,只需简单的拖拽㊁摆放与属性设置即可完成界面的设计,结果生成.c文件嵌入应用程序中即可,设计的初始参数设置界面如图5所示㊂图5㊀参数设置界面在多界面工作的情况下,必然存在界面之间的切换问题,界面切换时需要载入界面的图形与参数,并接受这一界面的操作管理㊂以下以载入某一参数设置界面的过程为例加以说明,界面任务流程图如图6所示,其中需显示的参数位于控制端,还需通过CAN通信获取参数㊂图6㊀界面管理任务流程图在界面管理任务中,需要等待界面更新标志,只㊀㊀㊀㊀㊀第2期翟延忠等:基于STM32的人机交互终端的设计109㊀㊀有出现界面更新标志,界面切换工作才开始执行㊂在进入界面时,需要获取该界面的参数㊂如果界面参数位于控制端,界面管理任务需通过消息队列向CAN发送任务发送请求参数的消息,再由CAN发送任务将其发送到控制端㊂CAN接收任务接收控制端的响应消息并将解析后的参数存入缓冲区㊂与控制端的通信有时间约束,若在规定时间内收到参数则在界面上显示,若超时则指示通讯失败㊂参数设置界面中要显示若干个标号与触屏按钮,每个按钮为一个控件,界面的交互操作涉及按钮检测㊁参数值修改㊁界面刷新㊁消息传递等内容㊂这些功能均利用EmWin的图形库实现,所生成的代码文件以回调函数的形式被调用运行㊂当查询到退出参数设置界面标志置位时,判断参数是否更改㊂若更改则将修改后的参数放入消息队列由CAN发送任务推送到控制端,将界面标号设置为监控主界面且置位界面更新标志位,从而退出参数设置界面㊂6㊀应用基于STM32开发的嵌入式人机交互终端在快开压滤机控制系统中得以应用,如图7所示㊂图7㊀嵌入式人机交互终端监控画面示例系统中,交互终端安装于控制柜上,与位于现场的压滤机控制器间通过CAN总线通信,控制器的某些运行参数与状态通过CAN通信传输至交互终端并在交互终端上以多种方式呈现,交互终端上的某些设置参数与命令也通过CAN通信传输至控制器以控制系统的运行㊂为了生动体现控制系统的运行状况,交互终端的监控界面以动画形式显示控制系统的压紧㊁进料㊁卸料等进程,形象地表现了控制系统的实时进程㊂此外,交互终端上还设有若干个参数设置与统计㊁状态设置与显示界面,各个界面间可方便地通过触屏按钮进行切换㊂7㊀结束语基于STM32所设计的嵌入式交互终端,硬件设计简单合理㊂FreeRTOS实时操作系统环境下的软件开发将交互终端的功能分成了若干个相对独立又相互配合的任务,EmWin图形库的使用使界面设计变得方便快捷,软件开发效率显著提高,而有效的实时动画实现方法与嵌入式处理器的运行相匹配,动画功能的实现更是提高了交互终端的品质㊂动画功能的进一步开发,需借助于辅助软件的开发,以实现更为生动与灵活的动画功能㊂参考文献:[1]㊀陈新,蒲庆文.基于emWin图形库的电动汽车液晶仪表设计[J].仪表技术与传感器,2013(7):105-107.[2]㊀李鹏飞,许金凯,韩文波,等.嵌入式人机交互界面的设计与实现[J].液晶与显示,2014,29(5):716-720.[3]㊀邓霞.一种新型储能变流器的人机界面设计方法与实现[J].电测与仪表,2016,53(4):97-101.[4]㊀张保静,周四春,唐琳.液晶编程器人机交互界面的设计与实现[J].核电子学与探测技术,2013,33(3):388-391.[5]㊀姚文祥.ARMCortex-M3权威指南[M].北京:北京航空航天大学出版社,2014.[6]㊀李路遥,王志新,邹建龙.采用STM32F103ZET6的移动应急照明电源人机交互系统设计[J].电源技术,2014,38(4):697-699.[7]㊀孔祥通,王春平,孙书鹰,等.基于CAN总线的嵌入式监控设备的设计[J].中国测试,2013,39(4):85-87;96.[8]㊀左忠凯,刘军,张洋.FreeRTOS源码详解与应用开发:基于STM32[M].北京:北京航空航天大学出版社,2017.[9]㊀万晓凤,刘志宇,丁小华,等.基于μC/OS-Ⅱ和emWIN的光伏逆变器实时监控系统[J].仪表技术与传感器,2017(3):58-63.[10]㊀宋勐翔,陈兰岚.基于ADS1298和STM32F407的心电采集与显示系统设计[J].现代电子技术,2015,38(13):141-144.作者简介:翟延忠(1965 ),教授,博士,主要研究领域为工业生产自动化与信息化,嵌入式技术开发与应用㊂E⁃mail:zidongkongzhi@126.com翟宝蓉(1994 ),硕士研究生,主要研究领域为嵌入式技术开发与应用㊂E⁃mail:zhaibaorong@qq.com。
STM32人机界面的应用解析
STM32人机界面的应用解析简介本文档旨在解析STM32人机界面的应用。
人机界面是指将人与机器之间的交互通过界面进行实现。
本文将重点介绍STM32微控制器在人机界面中的应用。
STM32微控制器STM32微控制器是意法半导体(STMicroelectronics)公司推出的一款低功耗、高性能的微控制器。
它提供了强大的计算和通信能力,适用于各种应用领域。
人机界面的需求在很多应用中,人机界面起到了至关重要的作用。
通过人机界面,用户可以与设备进行交互、输入指令、获取信息等。
在一些嵌入式系统中,人机界面还可以用于显示系统状态、调整参数等功能。
STM32在人机界面中的应用STM32微控制器广泛应用于各类人机界面设计中。
它具有以下优点:1. 强大的计算和通信能力:STM32微控制器采用了高性能的ARM Cortex-M内核,具有强大的计算能力和丰富的通信接口,可以支持复杂的人机界面设计。
2. 多种外设支持:STM32微控制器集成了丰富的外设,如LCD控制器、触摸屏控制器、USB接口等,可以方便地与各种输入输出设备进行连接。
3. 低功耗设计:STM32微控制器采用了先进的低功耗技术,可以有效延长设备的使用时间,适用于电池供电的应用场景。
4. 灵活的软件支持:STM32微控制器具有丰富的软件开发工具和库,开发人员可以使用各种开发环境进行开发,并且可以利用现有的软件资源加快开发进度。
应用案例以下是一些使用STM32微控制器的人机界面应用案例:1. 工业控制面板:在工业控制设备中,人机界面可以用于显示设备状态、设置调试参数等。
2. 智能家居控制器:人机界面可以用于控制智能家居设备,如灯光控制、温度调节等。
3. 医疗仪器界面:医疗仪器中的人机界面可以用于患者信息展示、操作指导等。
结论通过对STM32微控制器在人机界面应用的解析,我们可以看出STM32在人机界面设计中具有很大的优势,并且有着广泛的应用前景。
在选择人机界面方案时,考虑使用STM32微控制器将会是一个不错的选择。
基于STM32单机的扫地机器人设计

基于STM32单机的扫地机器人设计一、引言扫地机器人是一种智能化的家用清洁设备,能够自主扫地并清洁地面。
目前市面上的扫地机器人大多采用各种传感器和控制器来实现自主导航和清扫功能。
本文将基于STM32单机设计一款简单的扫地机器人,通过使用STM32的处理能力和丰富的外设接口,实现机器人的自主导航和清扫功能。
二、硬件设计1.控制器选择本设计将采用STM32F4系列的微控制器作为控制器,该系列的处理器性能强大,具有丰富的外设接口,足以满足扫地机器人的控制需求。
2.传感器选择扫地机器人需要有多种传感器来实现自主导航和避障功能,包括超声波传感器、红外传感器、光电编码器等。
这些传感器能够帮助机器人获取周围环境的信息,从而实现自主导航和避障。
3.执行器选择扫地机器人需要有清扫装置,选择合适的电机和驱动器来驱动清扫装置。
还需要有驱动轮来实现机器人的移动。
4.电源管理扫地机器人需要有合适的电源管理模块,能满足各个模块的电源需求,并具备一定的电池管理能力,以便机器人长时间工作。
三、软件设计1.系统架构扫地机器人的软件分为上位机控制程序和下位机控制程序。
上位机控制程序用于与机器人进行通信和控制,下位机控制程序用于处理传感器数据和执行控制指令。
2.传感器数据处理下位机控制程序需要对传感器获取的数据进行处理,包括距离数据的处理、地面清扫状态的判断等。
3.导航算法扫地机器人需要一定的导航算法来实现自主导航功能,比如障碍物避障、路径规划等。
4.电机控制下位机控制程序需要实现对电机和驱动器的控制,包括清扫装置的开启和关闭、驱动轮的驱动。
5.通信模块上位机控制程序需要通过合适的通信模块与下位机进行通信,常用的通信模块有蓝牙模块、Wi-Fi模块等。
四、总体设计通过上述的硬件设计和软件设计,整个扫地机器人系统能够实现自主导航和清扫功能。
下位机控制程序获取传感器数据进行处理,采取相应的控制策略来实现自主导航,并对电机执行控制指令来实现地面清扫。
基于STM32的触摸屏显示系统设计

基于STM32的触摸屏显示系统设计1.引言随着科技的不断进步,触摸屏显示系统越来越普及和应用广泛。
触摸屏提供了一种直观、简单且交互性强的用户输入方式,因此在很多领域都有广泛的应用,如智能手机、平板电脑、汽车导航等。
本文将介绍一种基于STM32的触摸屏显示系统设计。
2.系统架构系统由主控板、触摸屏模块以及液晶显示器组成。
主控板使用STM32微控制器作为核心,负责整个系统的控制和数据处理。
触摸屏模块通过SPI接口与主控板连接,实现对触摸事件的检测和数据传输。
液晶显示器通过GPIO接口与主控板连接,用于显示系统界面。
3.系统功能该触摸屏显示系统具有以下功能:3.1触摸事件检测和处理系统能够实时检测到用户的触摸事件,并根据触摸事件进行相应的处理。
通过触摸屏模块的驱动和算法,可以高效地检测到触摸事件的位置和状态,如按下、滑动、放开等,并将触摸事件数据传输给主控板进行处理。
3.2图形界面显示系统能够将处理后的数据以图形界面的形式显示在液晶显示器上。
主控板通过与液晶显示器的通信,将界面数据传输给显示器,并控制显示器进行相应的显示。
用户可以通过触摸屏进行交互,如点击按钮、滑动列表等。
3.3音频播放系统还可以进行音频播放功能。
通过主控板的音频接口,可以连接外部音频设备,如音响或耳机。
用户可以通过触摸屏界面选择和控制音频文件的播放、暂停、调节音量等。
4.系统设计4.1硬件设计硬件设计包括主控板、触摸屏模块和液晶显示器的选型和连接设计。
主控板选择STM32系列的微控制器,具有丰富的外设和高性能的处理能力。
触摸屏模块选择支持SPI接口的触摸屏驱动芯片,能够实现高速数据传输和准确的触摸事件检测。
液晶显示器选择支持GPIO接口的液晶屏,具有较高的分辨率和显示效果。
4.2软件设计软件设计包括主控板的固件开发和触摸屏界面的设计。
主控板的固件开发主要包括驱动程序和应用程序的编写。
驱动程序包括对触摸屏模块和液晶显示器的控制程序,实现数据传输和显示控制。
基于STM32单机的扫地机器人设计

基于STM32单机的扫地机器人设计扫地机器人是一种可以自动清扫地面的机器人,其使用在家庭和办公场所非常广泛。
为了实现扫地机器人的自动化清洁功能,可以使用单片机来设计控制系统,并且STM32单片机是一种常用的选择。
STM32单片机是由意法半导体(STMicroelectronics)公司推出的一种基于ARM Cortex-M内核的系列微控制器。
它具有低功耗、高性能和丰富的外设接口等特点,非常适合于扫地机器人控制系统的设计。
在扫地机器人的设计中,需要使用传感器来获取环境信息。
可以使用STM32单片机的外部中断和定时器来进行传感器数据的读取。
可以使用红外传感器或激光传感器来检测地面上的障碍物,并通过外部中断来触发停止机器人运动的操作。
扫地机器人需要具备自主导航的能力,以实现房间内的自动清洁。
可以使用STM32单片机的PWM输出功能来控制机器人的电机,从而实现前进、后退和转向等动作。
还可以使用编码器来监控电机转动的速度和位置,以实现精确的导航。
在扫地机器人的设计中,还需要借助STM32单片机的通信接口来实现与外部设备的数据交互。
可以使用UART接口来与上位机进行通信,实现机器人状态的监控和控制。
还可以使用I2C或SPI接口来连接其他传感器和执行器,以实现更多的功能扩展。
在软件设计方面,可以使用STM32Cube软件套件来开发扫地机器人的控制程序。
STM32Cube提供了一系列的驱动程序和中间件,可以大大简化开发者的开发工作。
使用STM32CubeMX工具可以快速生成基础的工程框架,并通过HAL库来访问STM32单片机的硬件资源。
基于STM32单片机的扫地机器人设计可以实现自动清洁的功能,并具备较高的精确性和可扩展性。
通过合理的硬件设计和软件开发,可以实现一个高效、智能的扫地机器人系统。
基于STM32单机的扫地机器人设计
基于STM32单机的扫地机器人设计扫地机器人是一种能够自动清扫地面的智能设备,广泛应用于家庭、办公场所、商业区等各种场景。
本文将基于STM32单片机进行扫地机器人的设计。
我们需要选择适用于扫地机器人的STM32单片机,推荐使用STM32F405RG。
该单片机具有丰富的外设资源和强大的计算能力,适合用于实现扫地机器人的各种功能。
接下来,我们需要进行机器人的机械结构设计。
扫地机器人需要具备行走、清扫、避障等功能,因此需要设计一个具有足够承载能力和稳定性的底盘,并安装电机、传感器等设备。
可以参考市面上已有的扫地机器人样机进行设计,或者自行设计一个适用于该单片机的机械结构。
然后,我们需要进行电路设计。
扫地机器人需要使用电机驱动、传感器接口、电源管理等电路。
根据具体需求,可以选择合适的模块或者自行设计电路。
需要注意的是,STM32单片机的开发板通常会提供一些常用的接口,例如UART、I2C、SPI等,可以方便地与电路进行连接。
接下来,我们需要进行软件开发。
扫地机器人的软件包括底层驱动程序和上层应用程序。
底层驱动程序负责控制电机、读取传感器等底层操作,可以使用STM32提供的库函数进行开发。
上层应用程序负责实现机器人的具体功能,例如行走、清扫、避障等,可以使用C/C++语言进行开发。
在软件开发过程中,可以借助Keil、IAR等集成开发环境进行开发,也可以使用STM32CubeMX进行图形化配置。
我们需要进行系统调试和优化。
扫地机器人的设计开发过程中,可能会遇到各种问题,例如电路连接错误、软件逻辑错误等。
需要通过仔细的调试和测试来解决这些问题,确保机器人能够正常运行。
还可以根据实际需求对系统进行优化,例如降低功耗、提高运行效率等。
基于STM32单片机的扫地机器人设计主要包括选型、机械结构设计、电路设计、软件开发、系统调试和优化等步骤。
通过认真的设计和开发,我们可以实现功能强大、性能稳定的扫地机器人。
基于STM32单机的扫地机器人设计
基于STM32单机的扫地机器人设计随着科技的发展和人们生活水平的不断提高,智能家居产品在我们的生活中扮演着越来越重要的角色。
扫地机器人作为智能家居产品的代表之一,其应用范围也越来越广泛。
本文将介绍一种基于STM32单机的扫地机器人设计方案,帮助读者了解扫地机器人的工作原理和设计过程。
一、扫地机器人的工作原理扫地机器人是一种能够自主清扫地面的智能设备,其工作原理主要包括感知环境、路径规划和清扫操作。
感知环境是扫地机器人能够识别和感知周围环境的能力,通常通过激光雷达、摄像头和红外传感器等设备来实现。
路径规划是指扫地机器人在感知到环境之后,能够根据环境情况制定清扫路径,避开障碍物并完成清扫任务。
清扫操作则是扫地机器人根据路径规划进行清扫操作,通常通过刷盘、吸尘和拖布等方式清理地面。
二、基于STM32单机的扫地机器人设计方案在扫地机器人的设计中,STM32单机是一种常用的控制芯片,其性能稳定、功耗低、易于使用,非常适合用于扫地机器人的控制系统。
下面将介绍一种基于STM32单机的扫地机器人设计方案。
1.硬件设计首先是扫地机器人的硬件设计,包括主控板、传感器模块、驱动器和执行器等。
主控板采用STM32单机控制芯片,通过串行通信与传感器模块和执行器进行数据交换和控制操作。
传感器模块包括激光雷达、红外传感器和摄像头等设备,用于感知环境和获取地面情况。
驱动器和执行器包括电机驱动器、刷盘马达、吸尘器和拖布等设备,用于实现扫地机器人的运动和清扫操作。
2.软件设计其次是扫地机器人的软件设计,包括底层驱动程序、传感器数据处理和路径规划算法等。
底层驱动程序是指控制硬件设备的基本驱动程序,包括与电机、传感器和执行器等设备进行通信和控制操作。
传感器数据处理是指对传感器获取的数据进行处理和分析,例如通过激光雷达获取地面障碍物的位置和距离信息。
路径规划算法是扫地机器人的核心控制算法,通过对传感器数据进行分析和计算,制定清扫路径并实现自主清扫操作。
基于STM32嵌入式开发板的人机交互界面2(DOC)
基于STM3 2嵌入式开发板的人机交互界面设计摘要论文介绍了一种基于嵌入式开发板的人机交互界面设计,此界面利用STM32F103嵌入式开发板作为主控制器,完成类似于智能手机界面及内部软件的设计。
将我们生活中常常接触到的智能手机界面引入到嵌入式开发板上,是将现有成果重返原始开发板的一次设计过程,旨在加深对嵌入式开发板的理解以及加强对嵌入式操作系统的实际操作与开发能力。
本界面主要包括电子相册,万年历以及计算器等软件,具有结构简单,使用方便,设计精美等特点。
关键词:STM32F103嵌入书开发板;人机交互界面;电子相册;万The man-machine interaction interface design based on STM32embedded devel op ment boardABSTRACTPaper introduces a kind of human-computer interaction interface design based on embedded development board, this interface usingSTM32F103 embedded devel opm ent board as themain controller, the finish is similar to the and thesmart phone interface design of the internal software. Will be our lifeoften come into contact with the smart-phone interface is introduced in theembedded devel opm ent board, to return to the original devel opm ent board is the existing results of a design p rocess that aims to dee pen the understanding of embedded devel opm entboard and strengthen the p ractical op eration of embedded op erating system and devel opm ent cap abilities. The interface is mainly including electronic p hoto album, calendar and calculator software, it has a simp le structure, easy to use, exquisite design etc.Key words: STM32F103 embedded develo pm ent board book;The human-co mpu ter interaction interface; Electronic p hoto album;Calendar; Calculator.2项目的研究背景及意义嵌入式系统概述.2课题目标分析及系统总体方案3.4.1电阻式触摸屏基本原理 3.4.2触摸屏硬件接口电路5人机界面的操作错误!未定义书签。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
智林STM32开发板上实现的简单人机界面之三/upload/2009/10/20/78accd80-6a80-4661-a947-d5d9042775f6.rar智林STM32人机交互程序实现之三1、用于智林STM32开发板2、命令支持现在共支持四个命令:help、cls、ledon、ledoff。
输入he lp显示系统的可用命令。
输入cls清屏。
输入ledon,点亮开发板的绿色指示灯。
Ledoff将指示灯熄灭。
如果输入其它命令,屏幕显示Bad Command,重新回到提示符下。
3、输入方法在开发板上有七个按键:摇杆方向键五个、右下角PB2和PB3。
可以用这七个键输入英文和简单命令。
摇杆往上按一下输入a,迅速再按一下切换为b,依次可切换为abcdefg。
往右推可输入hijklmn,往左是opqrst和?,往下是rstuvw和!。
中间键可输入空格、逗号、句号和0123.PB2用于退格,若是退格到提示符,扬声器示警。
PB3表示回车,命令输入完成。
在测试过程中有一些小BUG,不过正常的操作是不会出现的。
系统分类:嵌入式 |用户分类:智林STM32之人机界面篇 |标签:智林,STM32,人机交互,shell |来源:原创 |点击查看原文发表评论阅读全文(353) | 回复(0)发表于2009/10/18 20:25:301系统分类:嵌入式 |用户分类:智林STM32之人机界面篇 |标签:智林,STM32,按键,键盘 |来源:原创 |点击查看原文发表评论阅读全文(289) | 回复(0)发表于2009/10/18 12:11:081Keil MDK下的STM32工程/upload/2009/10/18/1bd2602b-2e1f-4d58-8f31-ec6ef8261660.rarKeilMDK下的STM32工程一、功能分析1、该工程是一个简单的shell,用于智林STM32开发板。
在开发板上有七个按键:摇杆方向键五个、右下角PB2和PB3。
可以用这七个键输入英文和简单命令。
2、使用方法开发板上点复位以后,处于初始模式,最上面一栏显示CPU的使用率(这是ucos统计任务得到的值)和当前模式可输入字符(abcd和空格键)。
同时第二行显示命令提示符:s h>。
摇杆上推输入a在液晶上回显,右推输入b,左推输入c,下推输入d,按OK输入空格。
按PB2可切换输入模式,总共六种模式:初始化是abcd和空格键,按PB2可分别切换为:efgh退格、ijkl逗号、mnop句号、qrstu和vwxyz。
包括所有的英文小写和两个标点、空格键和退格键,简单的命令输入已经够了。
退格键可清除刚刚输入的字符,当到达命令提示符时,再按退格则扬声器报警提示。
3、命令支持现在共支持四个命令:help、cls、ledon、ledoff。
输入help显示系统的可用命令。
输入c ls清屏。
输入ledon,点亮开发板的绿色指示灯。
Ledoff将指示灯熄灭。
如果输入其它命令,屏幕显示Bad Command,重新回到提示符下。
二、工程源代码组织1、文件的组织工程目录下共六个目录:startup、lcd、device、ucos_stm32、ucos、userapp。
其中startup 目录下放着stm32起动文件和库文件、lcd目录下放着液晶驱动文件和shell输出处理文件、device目录下放置设备驱动文件(现在就一个speaker.c用于以后扩展设备)、ucos_stm32放置ucos在STM32下移植时需要的两个文件、usos目录放着uscos操作系统源代码。
Userapp目录放着用户主程序,为了方便阅读,每一个任务使用一个c文件。
2、工程的组织组织方式与文件目录的组织基本一致,用Keil MDK的主菜单project/manage/component s、enviroments子菜单可进行工程文件组的组织。
经过这两天的整理,我觉得源代码的组织已经比较清晰了。
其它的话我也不多说,大家看代码吧。
如果有智林STM32开发板的朋友可以下载、编译使用。
系统分类:嵌入式 |用户分类:智林STM32之人机界面篇 |标签:智林,STM32,人机交互,shell |来源:原创 |点击查看原文发表评论阅读全文(417) | 回复(1)发表于2009/10/17 20:52:261智林STM32程序源代码的分析和整理04智林STM32程序源代码的分析和整理04一、定时器的配置1、概述STM32的定时器功能比较多、配置也较复杂,我现在了解不多,边用边学吧。
智林开发板上有两个用定时器的地方,一个是液晶的背光电源,要求输出一定的PWM波形,用于整流提供电源;二是用于控制喇叭,也是时钟脉冲输出。
定时器首先的选择是计数、还是定时,我这里用的都是定时,输出模式可以是输入时定时器的捕获,可以是比较匹配时设定输出(经常用到这一种)。
2、源程序void TIMx_Config(void) {TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; //时基单元配置数据结构TIM_OCInitTypeDef TIM_OCInitStructure;//输出模式设置数据结构/* PA2脚接着定时器2 CH3方波脉冲输出,该输出是液晶显示整流电源*/GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2; //PA2,复用输出模式GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //即用于定时2 通道3GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructure);/* 时基单元配置:TIM2计数频率=36MHz除以3=12MHz,输出频率=12MHz除以2倍周期值。
*/TIM_TimeBaseStructure.TIM_Period = CCR3_V al;//40写入自动装载寄存器,150KHz 输出。
TIM_TimeBaseStructure.TIM_Prescaler = 2; //分频系数3TIM_TimeBaseStructure.TIM_ClockDivision = 0;//与什么采样相关,这里用不到//向上计数的特点是:从0到加载值,产生溢出;然后重新从0计数。
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure);/* 输出比较模式配置: 通道3 */TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_Toggle; //定时器计数与比较通道匹配时翻转TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;//开启输出通道TIM_OCInitStructure.TIM_Pulse = CCR3_V al;//比较通道的计数值TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_Low; //低电平有效TIM_OC3Init(TIM2, &TIM_OCInitStructure);TIM_OC3PreloadConfig(TIM2, TIM_OCPreload_Enable); //自动重装载,预装载TIM_Cmd(TIM2, ENABLE); /* TIM2定时器工作使能*///TIM_ITConfig(TIM2, TIM_IT_CC3, ENABLE);/* 时钟中断使能*/}这里只列出了液晶使用的定时器2通道3的输出,输出150kHz的频率。
没用到中断。
这个频率是怎么得到的呢?首先是TIM2使用APB1的36M,经过预分频,分频系数为(Prescaler+1)=3,3分频后为12MHz。
计数周期为40,计数到40与输出比较寄存器产生匹配,触发输出翻转,然后计数器重新开始计数。
故输出通道的频率为12MHz除以80,得到150 kHz。
二、串口的配置按键输入命令不怎么方便,很快我就要编写串口通信程序,用串口输入命令,控制开发板。
串口配置用库函数很方便。
void UART_Config(void){ //进行串口的初始化配置USART_InitTypeDef USART_InitStructure;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; /* UART的发送引脚*/GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructure);GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10; /* UART的接收引脚*/GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOA TING;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructure);USART_ART_BaudRate = 115200; //波特率USART_ART_WordLength = USART_WordLength_8b; //数据位8位USART_ART_StopBits = USART_StopBits_1; //停止位1USART_ART_Parity = USART_Parity_No ; //无奇偶校验USART_ART_HardwareFlowControl = USART_HardwareFlowControl_Non e; //无硬件流控USART_ART_Mode = USART_Mode_Rx | USART_Mode_Tx; //发送、接受模式有效USART_Init(USART1, &USART_InitStructure); /* 根据上面结构的参数对串口1进行初始化*/USART1->BRR =0x0271; /* 库函数的串口波特率计算有些问题,这里重新计算了一下*/USART_Cmd(USART1, ENABLE); /* 使能串口1 */}系统分类:嵌入式 |用户分类:智林STM32之人机界面篇 |标签:智林,STM32,源代码,整理 |来源:原创 |点击查看原文发表评论阅读全文(291) | 回复(0)发表于2009/10/17 17:12:091智林STM32程序源代码的分析和整理03智林STM32程序源代码的分析和整理03一、Systick的配置1、简单介绍这是一个系统定时器,时钟源可以为AHB时钟,也可设置为SysClk/8。