有轨巷道式堆垛机的动力学模型研究
巷道堆垛机的工作原理

巷道堆垛机的工作原理
巷道堆垛机是一种用于高密度货物储存和取货的自动化设备。
它通常用于仓库或物流中心,可以快速、高效地堆放货物,以节省空间和提高货物的存储能力。
巷道堆垛机的工作原理如下:
1. 控制系统:巷道堆垛机由一个中央控制系统控制,该系统接收到货物的位置和堆垛的要求后,通过计算机程序指导巷道堆垛机的动作。
2. 巷道:巷道堆垛机通过在仓库内开设的巷道来移动,通常有两个巷道,分别用于进货和出货。
巷道之间有一条中央走廊,使堆垛机能够在不干扰其他操作的同时进行工作。
3. 提升机构:巷道堆垛机通过一个或多个垂直提升机构来移动货物。
提升机构通常由电动液压或电动链条组成,可以将货物从地面运送到所需的储存位置。
4. 堆垛叉:巷道堆垛机有一对可伸缩的叉臂,用于抓取货物并将其放置在储存位置或取货位置。
叉臂通常由电动液压系统控制,可以水平移动和旋转,以便捷地处理货物。
5. 感应系统:巷道堆垛机配备了多种传感器和激光导航系统,以确保安全和准确操作。
这些传感器可以检测障碍物、确定货物位置和控制巷道堆垛机的准确定位。
在工作时,巷道堆垛机首先接收到来自仓库管理系统的指令,确定所需的货物类型和位置。
然后,它会移动到适当的巷道并使用提升机构将货物升起到所需的储存位置。
接下来,叉臂会将货物放置在正确的位置上。
当需要取货时,巷道堆垛机会根据指令将叉臂移动到所需的位置,并将货物取出。
通过这种方式,巷道堆垛机可以实现高效、自动化的货物储存和取货操作,提高仓库的货物处理效率和存储能力。
有轨巷道式堆垛机机械结构的研究

有轨巷道式堆垛机机械结构的研究有轨巷道式堆垛机机械结构的研究引言:随着物流行业的快速发展,堆垛机在仓储装卸作业中起着关键作用。
有轨巷道式堆垛机(AS/RS)是一种高度自动化的设备,可以实现自动化存储和检索货物。
机械结构是有轨巷道式堆垛机的核心部分,对于其运行稳定性、效率和安全性具有重要影响。
本文将探讨有轨巷道式堆垛机机械结构的研究现状,并对其发展趋势进行展望。
一、有轨巷道式堆垛机机械结构的现状1.1 单立柱型结构单立柱型结构是最常见的有轨巷道式堆垛机结构之一。
其具有结构简单、制造成本低等优点,但存在载荷能力有限、受力不均匀等缺点。
1.2 双立柱型结构双立柱型结构通过增加立柱数量提高了堆垛机的稳定性和工作效率。
其适用于大型堆垛机和高负载情况,但制造和安装难度较大。
1.3 桁架型结构桁架型结构是一种近年来较为流行的有轨巷道式堆垛机机械结构。
其具有结构刚性好、自重轻、稳定性高等优点,适用于高速堆垛机和大跨径情况。
二、有轨巷道式堆垛机机械结构的优化与改进2.1 结构刚性的优化有轨巷道式堆垛机在高速运行时,机械振动和变形会对其运行稳定性产生不利影响。
为了提高结构刚性,可以通过增加支撑点、加强关键节点等方式进行优化。
同时,在结构设计中采用优化算法进行优化,以求得更优的结构刚性。
2.2 堆垛机轨道的设计与改进堆垛机轨道是承载并导向堆垛机运动的重要部分。
为了提高堆垛机的稳定性和运行效率,可以采用闭合型轨道结构,增加辅助导向装置,使得堆垛机在运动过程中更加平稳。
2.3 悬臂结构的优化悬臂结构是堆垛机的重要组成部分,直接影响到其抓取货物的能力和稳定性。
通过对悬臂结构的优化,可以提高其刚性和强度,增加载荷能力和工作效率。
三、有轨巷道式堆垛机机械结构的发展趋势3.1 智能化随着信息技术的不断发展,有轨巷道式堆垛机逐渐向智能化方向发展。
通过引入自动识别、无线通信等技术,提高堆垛机的自动化程度和智能化水平,进一步提升其效率和安全性。
巷道式堆垛机控制系统的设计
团固四固团口 8 i
仿一 , 毽■ I A C MI E C P C DI A CA I AP
巷道式堆垛机 控制系统的 设计
姚 松 丽
( 海工 程 技 术 大 学 机 械 工程 学院 , 海 2 1 2 上 上 0 6 0)
Th n r l y t m sg o n t c e e Co t o s e De i n f r La e S a k r S
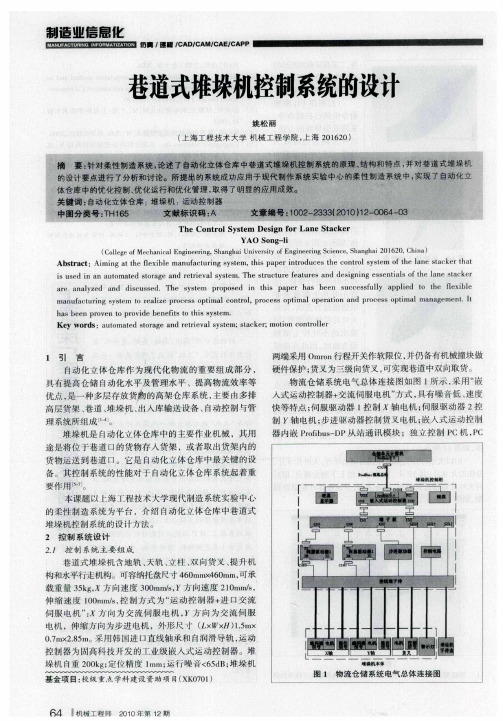
堆垛机是 自动化立体仓库 中的主要作业机械 ,其用 器 内嵌 Po b s DP从 站通 讯 模块 ;独立 控 制 P rf u — i C机 , C P
途是 将位 于巷道 口的货 物存 入货 架 ,或 者取 出货 架 内 的 货 物 运送 到巷 道 口。它是 自动化 立体 仓 库 中最关 键 的设 备 。其控 制 系统 的性 能对 于 自动 化立 体仓 库 系统 起着 重
堆垛机多级货叉瞬态动力学分析
态特性 。因此, 有 必要对其整机进行瞬态动 力学分析。从 而为产品设计和 改进奠定了基础 。
关键 词 : 巷 道 堆垛 机 ; 多级 货叉 ; A N S Y S; 瞬 态 动 力学
中图分类号 : T H1 6 ; T H2 4 6
文献标 识码 : A
文章编号 : 1 0 0 1 — 3 9 9 7 ( 2 0 1 3 ) 0 4 — 0 1 3 4 — 0 3
机 械 设 计 与 制 造
1 3 4
Ma c h i n e r y De s i g n
&
Ma n u f a c t u r e
第 4期 2 0 1 3 年 4月
堆垛机 多级货叉瞬 态动力 学分析
孙 永吉 , 张 红梅 , 邹 雪娟
( 1 . 兰州工业学院, 甘肃 兰州 7 3 0 0 5 0 ; 2 . 中国石油兰州石化公 司, 甘肃 兰州 7 3 0 0 6 0 )
1 引言
货叉机构是 自动化立体仓库巷道堆垛机存取货物的工作装 置。 由于结构布置的限制, 货叉长度要小于巷道的宽度 , 但伸出长
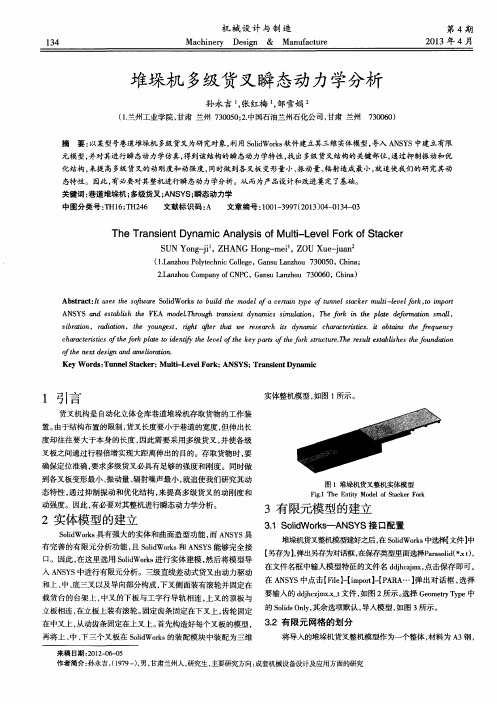
实体整机模型 , 如图 1 所示 。
度却往往要大 于本身 的长度 , 因此需要采用多级货叉 , 并使各级
叉板之间通过行程倍增实现大距离伸出的目的。存取货物时 , 要 确保定位准确 , 要求多级货叉必具有足够的强度和刚度 。同时做 到各叉板变形最小 、 振动量 、 辐射噪声最小 , 就追使我们研究其 动 态特性 , 通过抑制振 动和优化结构 , 来提高多级货叉的动刚度 和 动强度 。因此 , 有必要对其整机进行瞬态动力学分析 。
A b s t r a c t : / t u  ̄ s e s t h e S O tw f a r e S o l i d Wo r k s t o b u i l d t h e m o d e l o f a c e r t a i n t y p e o f t u n n e l s t a c k e r mu l t i - l e v e l f o r k , t o i m p o  ̄ A N S Y S a n d e s t a b l i s h t h e F E A m o d e 1 . T h r o u g h t r a n s i e n t d y n a mi c s s i m u l a t o i n ,T he f o r k i n t h e p l a t e d e f o r ma t i o n s m a l l , v i b r t a i o n ,r a d i t a i o n ,t h e y o u n g e s t ,r i g h t e r t h t a w e r e s e rc a h i t s d y n mi a c c h ra a ct e r i s t i c s .i t o b t a i n s t h e f r e q u e n c y c h r a ct a e r i s t c i s ft o h e f o r k p l a t e t o i d e n t f i y t h e l e v e l ft o h e k e y p a r t s ft o h e f o r k s t r u c t u r e . T h e r e s u l t e s t bl a i s h e s t h e f o u n d ti a o n
物流配送中心的有轨巷道式堆垛机

、 机 械 ,屉 随 体 仓 库的 m 现 而 发展 起 来的 专 用 起厦 l k 机 竹轨 巷遭堆 垛 机心 过运 行 机构 、 升机 卡 起 句和货 义的 嗣 r ,完 成 货物在 货架 范 周 内的纵 向 和横 向 移动 , 作
装 有导 向轮 它 的 I 安装滑 轮或 链轮 机构 、 l水平 导 24 载 货 台 部 : . 轮、 电缆拖 抟机 构或滑 触线 供电装 髓 中部 或下 部盛裟 起 载货 台 足堆 垛 机承 接 贷物 并进 行 升降 运动 的 部件 . 升机 掬 . + 内侧 安桂 州 峁导轨 . 使载 货台平 稳地 卜升及 魁 垂 直吊架 和水 斗结 构 州部分 牢 地 焊接 成 的结 构 £ F降 外 侧犍 有维修 爬梯便 维修 . 下部安 黻 毒莉及 被 动 乍轮 、 行 蛾 动牲 坦 及 F水平 导轮 、 冲 器等 部件 运 缓 件 , 【 有 货义 伸缩 机 构 绳过 载 干断 绳 安伞 装酋 装 松 n 升降动滑 轮 、1 ,降 向轮相I 导轮 删向 后 部和 侧曩 犍有 电 器拄删 机 I 1 F 终端 限位 开 25 货 又 及 降 7 . 关 和选J 认址板 等翻 件 5 货 艾魁堆垛 机 存取 货物 的执 行机构 ,犍 【 于载 货 台 5 } ;
安 全保 护装 置构 成
21 机 . 榘
起升 机构 用 以驱 动载 货 台 }升及下 降。起 升机 构 :
婴F电机 减速 器 、 h 驱动链 轮 动链 条 驱 升降链 轮 、 升降链
堆垛 机的机 架 足m 、桩 I 槊 、 ) . : 横 下横繁组 成 的 f方 条 、 ∈ 配重 块等组 成 升降链 条 虢货 台相 连接 . 升降链 与 形结 构框 架 . 垛 tt书器 取载 构件 为 r俺干 安城零 轮 F磺梁 的健轮披 裁货 台组成 封闭结 构 电机 减速机 足 t , ' J 件 和减 轻堆 垛机 露镀 .I、 横 粱 用榴 制制 作 , 杜 用 力 F 通 过冁动 链轮 带动 升降链 轮 旋转 .升降 链轮再 通 过7 降 1 通 制作 机架 沿 灭轨运 行 , 为防 J框架 倾倒 , I 梁 f I 在 : 横 链 条带动 城货 台 F运动
单立柱有轨巷道式堆垛机机械系统设计

图书分类号:密 级:摘要本文详细论述了普遍应用在现代大中型企业中的单立柱有轨巷道式堆垛机的设计方 案。
文中对堆垛机的分类,特点及其构造进行了详细的叙述。
堆垛机是自动化立体仓库中 最重要的起重堆垛设备,是随着立体仓库的出现而发展起来的专用起重机。
它能够在自动 化立体仓库的巷道中来回穿梭运行,将放置在巷道口的货物存入指定的货格,或者从货格 中取出货物运送到巷口。
设计重点主要包括:堆垛机的机架、升降机构、行走机构、货叉伸缩机构以及安全机 构。
文章在确定堆垛机的总体设计方案的前提下, 再对各个机构进行受力分析和设计计算, 最后进行必要的相关校核并最终确定各个的机构实际取值。
本次的毕业设计运用多种起重机的现代设计方法,特别是运用计算机辅助设计(CAD) 的方法,在计算机上将堆垛机的设计图纸CAD 化,大大提高了设计的效率,节省时间。
关键词: 自动化立体仓库;堆垛机;升降机构;行走机构;货叉伸缩机构;安全机构AbstractThis article has discussed the design of the singlepillar type of NarrowAisle Stacker Crane which has been universally used in modern most enterprises in detail. This article described the kinds of stakers, features and the structure in detail. Stacker cranes is the most important part of the automation threedimensional storehouse among the take heavy crane pile up equipment, it can in the tunnel of automation cube in the shuttle operation of round trip, will locate in tunnel the goods of mouth stock goods shelf; or opposite take out the goods transit in goods shelf go to tunnel mouth.The design focus mainly include: The stacker's rack, walk organization, fork telescoping mechanism and safe organization. Under the premise of overall design scheme of stacking crane, then for organization analyze by force condition calculate. Finally, check nuclear necessarily and definite every numerical.This Graduation Design use many kinds of Modern Designs of the crane, especially to use the method of Computeraided design(CAD),Stackers will be the design drawings of the CAD on the computer, which greatly improve the efficiency of the design and saving time.Keywords: Automation threedimensional storehouse Stacker Crane Movement organization Walk organization Fork telescoping mechanism Safe organization目 录1引言 (1)1.1 研究背景及意义 (1)1.2 研究的内容及设计思路 (1)1.2.1 主要设计内容 (1)1.2.2 设计要求 (1)1.3 研究的发展趋势 (2)1.4 堆垛机所受载荷的简化方法 (2)2 堆垛机的整体结构设计方案 (4)2.1 堆垛机结构的主要结构组成 (4)2.2 单立柱有轨巷道式堆垛机的特点 (5)2.3 堆垛机的机架结构 (5)2.4 堆垛机伸缩货叉的结构设计 (5)2.5 堆垛机起升机构的整体设计 (6)2.5.1 柔性件的选取 (6)2.5.2 卷筒的选取 (6)2.5.3 电动机的选取 (7)2.5.4 减速器的选取 (7)2.5.5 制动器的选取 (8)2.6 堆垛机行走机构的整体设计 (9)2.6.1 驱动方式的选取 (9)2.6.2 车轮的的设计 (9)2.6.3 电动机的选取 (10)2.6.4 减速器的选取 (10)2.6.5 制动器的选取 (10)2.7 轨道的设计与安装 (10)2.8 堆垛机的控制装置 (10)3堆垛机机架的结构设计计算 (13)3.1 机架立柱的尺寸设计 (13)3.2 机架的上、下横梁设计 (14)3.3 框架结构的设计数据 (14)4堆垛机伸缩货叉机构的设计计算 (15)4.1 伸缩货叉的扰度与强度 (15)4.1.1 下叉的受力分析计算 (15)4.1.2 中叉的受力分析计算 (16)4.1.3 上叉的设计分析计算 (17)4.2 货叉各参数的选择 (18)5堆垛机行走机构的设计计算 (19)5.1 行走机构电动机的选取 (19)5.2 堆垛机行走轮的设计计算 (19)5.3 行走机构减速器的选取 (20)5.4 行走机构联轴器的选择 (20)6堆垛机升降机构的设计计算 (21)6.1 升降机构零部件的设计计算 (21)6.1.1 钢丝绳的计算 (21)6.1.2 卷筒的相关尺寸计算 (21)6.2 升降机构传动装置的选取 (22)6.2.1 电动机的选择 (22)6.2.2 减速器的选择 (22)结论 (23)致谢 (24)参考文献 (25)附录 (26)附录1 (26)1 引言随着世界经济的持续发展和科学技术的突飞猛进以及经济全球化的趋势的加强,各国 面临着前所未有的机遇和挑战。
巷道式堆垛机的工作原理
巷道式堆垛机的工作原理巷道式堆垛机是一种用于仓储物流系统中的自动化设备,主要用于在狭窄的货架通道中进行货物的存储和取货操作。
它通过运行在地面上的导轨来引导垂直提升的货架车辆,从而实现高效的货物存储和取货功能。
下面将详细介绍巷道式堆垛机的工作原理。
一、巷道式堆垛机的结构组成1. 主机:巷道式堆垛机的主要组成部分,包括提升机构、行走机构、操作系统等。
提升机构用于实现货架车辆的上下运动,行走机构则用于在货架通道中的行走。
2. 货架车辆:负责携带货物进行存储和取货操作的载体,通过提升机构进行上下运动。
3. 导轨:贯穿整个货架通道,为货架车辆提供准确的行走轨迹,保证货架车辆的稳定移动。
4. 控制系统:用于控制整个巷道式堆垛机的运行,包括对提升机构、行走机构等的控制和监控。
二、巷道式堆垛机的工作原理1. 货物存储:当需要存储货物时,首先操作人员通过控制系统指令将货架车辆驶入目标货架通道,车辆驶至目标位置后,提升机构开始上升,抬起货物直至到达目标存储位,同时货架车辆开始退行,直至退出货架通道,完成一次存储任务。
2. 货物取出:当需要取货时,操作人员通过控制系统指令将货架车辆驶入目标货架通道,车辆停至目标位置后,提升机构开始下降,负责提升货物至合适高度,然后通过横移机构将货物横移到提取位置,完成一次取货操作。
3. 巡航巷道:在货架通道操作过程中,巷道式堆垛机通过导轨实现高精度的导航。
在控制系统的指令下,行走机构将货架车辆沿着指定路线准确行进,同时具有防撞功能,保证安全移动。
4. 控制系统:整个巷道式堆垛机的工作过程都由控制系统控制,操作人员通过控制系统进行操作指令的下达,监控巷道式堆垛机的运行状态,以及对故障进行排除和维护。
控制系统保证了整个设备的正常运行。
三、巷道式堆垛机的特点1. 高效性:巷道式堆垛机能够在狭窄的货架通道中进行存取货物操作,节省了货物存储空间,提高了仓储的存储效率。
2. 自动化:巷道式堆垛机通过控制系统的指令实现自动化操作,减少了人工操作的时间和成本,并提高了操作的精度和准确性。
巷道堆垛机结构动态响应仿真分析

MS E ot r ,a d tr u h s lt g d a mi rs o s s o e s u tr u n o w r n a k r rv l g t ur 8 C F A s f e n h o s i ai y a c e p n e ft t cu e d r g fr ad a d b c wad t e n ,a q J wa mu n h r i a i  ̄ e s s ds iu o a e .vb ain s a e a d e t p ot e c o re u irt nfo f n n I w e l .I p o ie 峙 it b t n p t r r i tn irt h p n xr s p r ra t n f c sd et vb a o m r t d r o 8u i o o i r o a 瑚 h es t rvd s
6 4
提升速度、货叉速度、平稳性、振动与噪声等 ,例 如 :国产堆垛机 的运行速度最高仍 为 2m s 右, / 左 而 国外最 高 可达 5m s 3 / ;()结 构 相对笨 重 。然 而 ,
提高 堆垛 机运 行速 度不 是简 单 的转 速 改变 ,它受 到 多种 因素 的制 约 。设 计 者 按 照 传 统 的经 验 设 计 方 法 ,在物理 样 机制造 出来 之前 无法 把握 其动力 学 特 性 变化 规律 ,因而难 以从 原理 上解决 结 构合理 性 的 问题 ,带 来 最 直 接 的 问 题 就 是 设 备 振 动 大 ,噪 声 大 。本文 借 助 C E方 法 ,模 拟 昆 船 集 团研 发 的单 A 立柱 堆垛 机 T 1 3m s D15在 / 的速 度下 结构 的动态 响 应历 程 ,为堆垛 机 的设 计提供 理论 参考 。
巷道式堆垛机工作原理
巷道式堆垛机工作原理
巷道式堆垛机是一种自动化物流设备,用于实现货物的高密度储存和快速取放。
其工作原理如下:
1. 货物存储:巷道式堆垛机通常工作于高架仓库中,其中设有一系列垂直贯通整个仓库的巷道。
货物通过输送设备将入库的货物送至巷道入口。
2. 系统控制:堆垛机配备有专门的控制系统,通过与仓库管理系统(WMS)进行连接,实现货物信息的读取和指令的下发。
控制系统根据任务需求,确定巷道式堆垛机的操作方式和路径。
3. 运行路径规划:巷道式堆垛机根据控制系统下发的指令,运行于预定的巷道中。
通过激光或传感器等装置,堆垛机实时感知巷道和堆垛架的位置。
4. 货物取放:堆垛机借助于升降机构和伸缩臂等装置,将货物从入库位置或储位中取出,然后移动到指定的出库位置,完成货物的取放任务。
5. 数据交互:堆垛机在取放货物的同时,将其与仓库管理系统进行数据交互,包括货物信息的更新、库存变动的记录等。
6. 安全保护:巷道式堆垛机配备有安全装置,如激光防撞装置、急停按钮等,以确保工作过程中的安全性。
巷道式堆垛机通过自动化的操作,可以实现货物的高效储存和准确取放,提高仓库的货物处理能力和运作效率。
堆垛机提升系统的动力学模型研究
响应 .
影 响提 升 系 统 垂直 振 动 的 主要 因素 有 ① 速 度 传感 器 和 电机 转 子 的 同轴 度 ; ② 钢 丝绳 的 张力 ; ③ 曳 引轮绳 槽磨 损 ; ④提 升 系统 的起 、 制动 加速 度 ; ⑤
他 工作状 态ቤተ መጻሕፍቲ ባይዱ突然变 化时 , 机械 系统将 产生强 烈 的冲
击 和振 动. 故 堆垛机 的振 动 问题 是制 约堆垛 机技 术 水 平 的主要 因素之 一. 本 文主要 针对 应用最 广 泛的
双 立柱巷 道式 堆垛 机 的工 作特 点 , 研 究提 升系统 在
垂 直方 向 、 横 向 的振 动机 理 , 并 建立其 动力 学模 型. 对 于堆垛 机 的设计 、 减振、 振 动控 制 等 方 面都 具 有
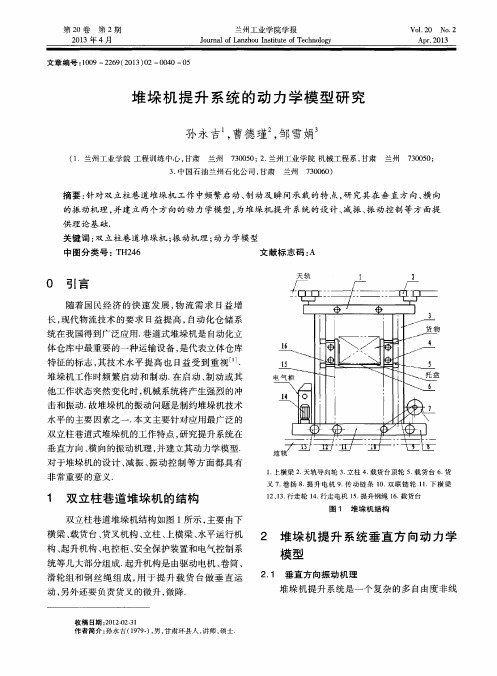
1 2、 1 3 . 行走轮 l 4 . 行 走 电机 1 5 . 提升钢绳 1 6 . 载 货 台
图 1 堆 垛 机 结 构
横梁 、 载货 台 、 货叉 机构 、 立柱 、 上横梁 、 水平 运行 机 构、 起升机 构 、 电控 柜 、 安全 保 护装置 和 电气 控制 系 统 等几 大部分 组成 . 起升 机构 是 由驱 动 电机 、 卷筒、
绳头 弹簧 .
2 . 2 垂 直方 向动 力学模 型
对该 提升 系统 的物 理模 型 简化 如下 j . 1 )选 曳 引 比 为 1 : 1的提 升 系统 进 行 建 模 分
析.
图 2 垂 直 方 向 动 力 学模 型
第七章 有轨巷道堆垛机

二、自动认址和定位
自动控制的堆垛机必须具有自动认址系统。自动认址 系统可分为数字式和非数字式两大类,而数字式认址又可 分为相对数字认址系统和绝对数字认址系统
1. 相对数字认址系统
每个货格有一个列号和一个层号。当操作人员输入货 格地址时,计数器里就记下了目的地址的列数和层数。从 中减去堆垛机在接受这个作业命令时所处位置的列数和层 数后,其差值就分别代表堆垛机从目前所处位置走到目的 地址需沿巷道纵长方向经过的列数和沿垂直方向经过的层 数。堆垛机沿巷道运行时,每经过1个货列就计1个数。计 够了一定的数(离目的地的距离)就减速,到达了目的地 就停止。在货台升降时,也用同样的方法认址。
第三节 安全保护装置与措施
一、运行保护
1. 在运行和升降方向,距终端开关一定距离处设强迫减速开 关,以确保及时减速。
2. 货叉伸缩机构只有在堆垛机运行机构不工作和起升机构亦 不工作时,才能启动。反过来,如果货叉已离开中央位置, 堆垛机运行机构便不能启动,而起升机构只能以慢速工作。
二、钢丝绳过载和松弛保护
当载货台上承受载荷超过最大或最小允许值时,通过钢 丝绳的拉力大小,调节装置中的弹簧产生不同行程,从而切 断起升装置电机回路电源,使装置及时停止运转。
三、钢丝绳断绳保护 断绳保护装置是由螺杆、压缩弹簧、左右安全钳及连
单立柱有轨巷道式堆垛机结构设计

单立柱有轨巷道式堆垛机结构设计
单立柱堆垛机的设计结构通常包括以下几个方面:
1. 垂直吊挂系统:单立柱堆垛机通常配备垂直吊挂系统,用于悬挂货物并通过垂直运动使货物上下移动。
这种系统通常包括一个吊杆和一个吊钩,通过电动驱动进行上下移动。
2. 行走系统:单列式堆垛机通常配置一组行走轨道,通过行走轨道和行走驱动器的驱动,实现机器的行走和位置的调整。
行走系统通常具有平移和旋转功能。
3. 升降系统:除了垂直吊挂系统外,单立柱堆垛机还配备了升降系统。
通过一组电动驱动升降啮合机构控制货台板的升降,使货物从地面升高到所需的高度。
4. 控制系统:单列式堆垛机的控制系统通常包括电气控制柜和操作面板。
操作面板通常安装在机器的侧面,用于手动控制机器运行、故障报警及维护设置。
以上就是单立柱有轨巷道式堆垛机的基本结构设计,它们的配置和选择通常会根据用户的需求以及具体的操作要求来确定。
一种有轨巷道堆垛机运行中轨道受力分析系统及方法[发明专利]
![一种有轨巷道堆垛机运行中轨道受力分析系统及方法[发明专利]](https://img.taocdn.com/s3/m/c2db79f14128915f804d2b160b4e767f5bcf8044.png)
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 202010516779.8(22)申请日 2020.06.09(71)申请人 罗伯泰克自动化科技(苏州)有限公司地址 215500 江苏省苏州市常熟古里镇银通路(72)发明人 胡军 赵成明 王建兴 (51)Int.Cl.G01L 5/00(2006.01)(54)发明名称一种有轨巷道堆垛机运行中轨道受力分析系统及方法(57)摘要本发明涉及一种有轨巷道堆垛机运行中轨道受力分析系统及方法,包括压力传感器、与所述压力传感器通信连接的信号采集卡、与所述信号采集卡通信连接的上位机、与所述上位机通信连接的堆垛机地面柜PLC;堆垛机在运行过程中,在轮轨相互作用下,堆垛机轨道及其各个部件在堆垛机荷载作用下产生应力、变形及其他动力响应;本设计能够对整个堆垛机轨道受力分析,综合判断出轨道的金属疲劳状况及磨损程度,利于提前预测故障,减少故障损失,也有利于优化轨道设计。
权利要求书2页 说明书4页 附图2页CN 111829703 A 2020.10.27C N 111829703A1.一种有轨巷道堆垛机运行中轨道受力分析系统,其特征在于,包括压力传感器、与所述压力传感器通信连接的信号采集卡、与所述信号采集卡通信连接的上位机、与所述上位机通信连接的堆垛机地面柜PLC;所述压力传感器设置于堆垛机轨道底部,用于检测堆垛机轨道压力;信号采集卡,用于收集所有压力传感器检测到压力信号,并将所有信号压缩、打包、放大后传输至上位机中;上位机,用于接收信号采集卡传输来的压力信号,并将接收到的压力信号通过软件进行分析处理,实时输出个压力传感器的动态信息,将压力传感器实时动态信息与上位机中数据库存储的比对数据进行比对,根据比对数据是否异常来确定是否报警和控制堆垛机地面柜PLC执行相关指令;堆垛机地面柜PLC,用于接收并执行上位机发出的指令控制堆垛机的工作状态。
有轨式巷道堆垛机机械结构设计-毕业设计【范本模板】
编号本科生毕业设计有轨式巷道堆垛机机械结构设计The Design of the Overall structure and walking mechanism of a stacker crane学生姓名专业学号指导教师学院2011年 06 月自动化立体仓库是物流中的重要组成部分,它是在不直接进行人工干预的情况下自动地存储和取出物流的系统.它是现代工业社会发展的高科技产物,对提高生产率、降低成本有着重要意义。
近年来,随着企业生产与管理的不断提高,越来越多的企业认识到物流系统的改善与合理性对企业的发展非常重要.堆垛机是自动化立体仓库中最重要的起重堆垛设备,它能够在自动化立体的巷道中来回穿梭运行,将位于巷道口的货物存入货格;或者相反取出货格内的货物运送到巷道口。
本文详细论述了在现代大多数企业中普遍使用的双立柱堆垛机的设计方案,文章的重点放在其三个部件:升降机构、行走机构、货叉伸缩机构的设计上.首先,提出各个机构的总体设计方案;其次,对各个机构的受力情况进行了分析并计算,然后估算初取值,再进行校核,最后确定各个实际值.关键词自动化立体仓库堆垛机Automation three—dimensional storehouse is that thing flows important composition part,it is to stock and take out voluntarily under not directly carrying out the condition of artificial intervention the system that thing flows out . it is the high—tech outcome of modern industrial social development, for raise productivity and reduction cost have important meaning。
物流配送中心的有轨巷道式堆垛机

2.2 运行机构 运行机构驱动堆垛机沿运行轨道水平运动, 运行机
构 由 电 机 减 速 器 、行 走 轮 、导 向 轮 等 组 成 。 在 下 横 梁 下 面 安装行走轮,在行走轮侧面有导向轮,保证堆垛机能够在 地轨上正常行驶。轴装式电机减速器安装在前面的行走 轮上,当切断电机电源时,电机能够自动制动,使堆垛机 停止在立体库的巷道中。 2.3 起升机构
中图分类号:TP 29
文 献 标 识 码 :B
文章编号:1002- 2333( 2006) 06- 0073- 02
1引言 堆 垛 机 是 自 动 化 立 体 仓 库 中 最 重 要 的 搬 运 、起 重 、堆
垛 设 备 ,它 担 负 着 出 库 、进 库 、盘 库 等 任 务 。本 文 即 主 要 介 绍在物流配送中心的立体仓库中所应用的有轨巷道式堆 垛机的工作原理及设计要点。 2 堆垛机的结构及工作原理
堆 垛 机 的 机 架 是 由 立 柱 、上 横 梁 、下 横 梁 组 成 的 长 方 形 结 构 框 架 ,是 堆 垛 机 的 主 要 承 载 构 件 。为 了 便 于 安 装 零 件和 减 轻 堆 垛 机 重 量 ,上 、下 横 梁 用 槽 钢制 作 ,立 柱 用 方 通制作。机架沿天轨运行,为防止框架倾倒,在上横梁上 装有导向轮。它的上部安装滑轮或链轮机构、上水平导 轮 、电 缆 拖 挂 机 构 或 滑 触 线 供 电 装 置 。中 部 或 下 部 安 装 起 升机构,立柱内侧安装升降导轨,使载货台平稳地上升及 下 降 。立 柱 外 侧 装 有 维 修 爬 梯 便 于 维 修 ,下 部 安 装 主 动 及 被动 车 轮 、运 行 驱 动 装 置 及 下 水 平 导 轮、缓 冲 器 等 部 件 。 后部和两侧安装有电器控制柜、上升及下降终端限位开 关和选层认址板等部件。
很好的资料有轨巷道堆垛机

在机上便于地面操作的部位装有设定器,操作人员站在巷 道口的地面,通过机上设定器,设定出入库作业方式和地址等 数据。适用于出、入频率高,堆垛机台数不多且未配置输送机 的中小规模(货位一般不超过2000个)仓库。
4. 远距离集中控制方式 设定器安装在地面集中控制室内。操作者通过设定
5. 堆垛机停准后才能伸货叉。
6. 货叉在货格内作微升降时,用检测开关限制 微升降行程或限制其动作时间,以防止货叉微 升降过度,损坏货物、机构或货架。
第四节 电气控制系统
一、控制方式
1. 手动控制方式
用于出入库频率不高,规模不大的仓库。
2. 半自动控制方式
这种控制方式,其控制设备除手动操纵器外,一般还设有 简单的继电器逻辑控制装置。除自动停准功能外,还能自动换 速、自动认址、自动完成货叉伸缩存取货物的功能,适用于出 入库比较频繁,规模不大的仓库。
3、取物装置复杂。堆垛机配备有特殊的取物装置, 常用的有伸缩货叉、伸缩平板,工作时,能对两侧货 架作业,存取货物。 4、堆垛机的电力拖动系统要同时满足快速、平稳和 准确三个方面的要求。
5、安全要求高。必须配备齐全的安全装置,并在电 器控制上采取一系列连锁和保护措施。
三、有轨巷道式堆垛机的分类
1. 按支承方式分 悬挂式堆垛机 : 其行走机构安装在堆垛机门架的
1、整机结构高而窄。采用有轨巷道式堆垛机的 高架仓库货架很高,而货架巷道非常狭窄,堆 垛机的宽度一般只与所搬运的单元货物的宽度 相等。
2、结构的刚度和精度要求高。堆垛机的金属结 构设计除需满足强度要求外,结构的刚度和精 度。制动时,机架顶端水平位移一般要求不超 过20mm,结构振动衰减时间要短。载货台在立 柱上的升降导轨的不垂直度一般要求不超过3~ 5mm。
单立柱有轨巷道式堆垛机运行过程的仿真分析

图 3 堆垛机向前滑行的仿真结果
从仿真结果 (见图 3)可以看出 ,在堆垛机滑行的 过程中 ( t = 6~15 s) ,前 、后轮的法向接触力始终大于 零 (见图 3a) ,说明行走轮始终与轨道接触 ,没有发生 脱轨的趋势 。从图 3b看出 ,堆垛机向前自由滑行 9 s 后 ,速度 的 减 少 量 只 有 01092m / s, 平 均 加 速 度 约 为
图 1 堆垛机的实体模型
此 ,在动力学建模
© 1994-2010 China Academic Journal Electronic Publishing House. All rights reserved.
设备设计 /诊断维修 /再制造
现代制造工程 2007年第 8期
由以上仿真结果可知 ,可以从 X方向加速度绝对
111
© 1994-2010 China Academic Journal Electronic Publishing House. All rights reserved.
现代制造工程 2007年第 8期
设备设计 /诊断维修 /再制造
2)采用多体系统仿真分析的方法可以使设计人 员直观地看到堆垛机各部件的协调运动过程 ,从而可 以及时地对结构参数进行调整和改进 ,有利于缩短产 品开发周期和降低成本 。
图 4 加速度平顺性对立柱摆幅的影响
值及平顺性两方面来控制立柱摆幅 。但加速度绝对值
的减小必然使堆垛机工作效率降低 。因此 ,在堆垛机加
下可以尽可能提高加速度绝对值的大小 ,这对提高堆 垛机的工作效率是非常有利的。在实际样机试验中 ,若 以原来立柱的最大摆幅 01035m 为一个控制范围 ,堆垛 机的加速度可以由原来的 015m / s2提高到 018m / s2。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Re e r h o Dy m i o lo ir a La wa s a ke s a c n na c M de f a Ra l o d ne y— t c r
堆 垛 机 物 理 模 型 的建 立
1 1 思路 分 析 .
出堆 垛机 的动 态特性 , 为减振 减 噪提 供依 据 。 影 响堆 垛 机振 动 的原 因 有很 多 , 主要 有 以下 几
堆垛 机是 一 台 比较 复 杂 的机 器 , 由很 多 构 件组
点: ①堆垛机导轨的平行度 、 面度 、 平 直线度不高造 成的摩擦 ; ②装 配的误差 ; 堆垛 机结构材料 的缺 ③ 陷, 主要指材料 的强度不够及散热性能不好 ; ④结构 设计 中存 在 的不合 理 , 主要 指堆 垛机 的质 量分 布 、 模 态分布和刚度指标不合理 ; 堆垛机运行 时频繁 的 ⑤ 启动 、 停止及加 、 减速产生的惯性力 ; ⑥风阻。在 以
维普资讯
有轨 巷道 式堆 垛机 的动力 学模 型研 究
文章编号 :0 6—15 ( 0 7 0 0 3 0 10 3 5 2 0 ) 2— 0 3— 4
3 3பைடு நூலகம்
有 轨 巷 道 式 堆 垛 机 的动 力学 模 型 研 究
孙军艳 ,曹西京 , 军帅 孙
( 陕西科技 大学 机 电工程学院, 陕西成阳 72 8 10 )
要实现物流的高效 率 , 必须 提高堆垛 机存取速度 。
制约 堆垛 机运 行速 度 的最 主要 的原 因是振 动 太大 引 起 的定位 精度 不准 , 稳性 能差 ; 外一 个制 约堆 垛 平 另
机运 行速度 的原 因是 噪 声 ( 质 上 也 是 一种 振 动 ) 本 。 本 文 主要研 究堆 垛 机 的振 动 问 题 , 以期 从 理 论 上 得
Absr c Ai a i i r to nd n ie n te r n o tc e tp e e t t a t: m tb gv b ain a o s si h u fsa k ra r s n ,wh c v r a fe to ih ha e g e tef c n sa ke  ̄r n s e d a d r s i g p e iin,t ri l rn o wa d t tusn y a c o su y t e t c r u p e nd a d e sn r cso he a tc e b i g fr r ha i g d n mi s t t d h d n mi a a i t .I h ri l y a c c p b l y n t e a tce,we u e fn t l me tmeh d t n lz h d l n s i s ie ee n t o o a ay e t e mo e ,a d u e MATLAB i t a c l t o c lu a e,wh c e lz tc e mo ei g a n y e Th e e r h wi fe h a i o e u i g ih r a ie sa k r d ln nd a a z . l e r s a c l o r t e b ssf rr d cn l t e vb ain a d n ie n t e r h i r to n o s s i h o y. Ke r : i r t n a d wa e;sa k r;fn t lme tme h d;MATLAB;mo a n lss y wo ds v b ai o n v tc e i ie ee n t o d la a y i
S N u —a U J ny n,C O Xi n A g
( h n i nvri f cec n eh ooy i yn h n i 0 , h a S a x U i syo i ea dT c n l ,Xa agS a x 7 2 8 C i ) e t S n g n 1 1 n
摘 要: 针对堆垛机运行 时振动大 、 噪声大 , 严重 影响其 运行 速度 和认址精 度 的问题 , 出利 用 动力学来 研究 提
堆垛机的动态性能 。采用有 限元 法进行 分析 , 助 MA L B软件进行运算 , 借 TA 实现 了对堆垛 机的动力 学建模和分析 , 从理论上得出 了堆垛机 的动态特 性 , 为减振减 噪提供 了依据 。
上 因素 中 , 第一 、 、 二 三项 可 以通 过 提 高 零 件 加 工 精 度和 装 配精度 及 选 用 合适 的 材料 来 解 决 , 四 、 、 第 五
成( 如图 1 所示 ) 而不是单一 的构件 ; , 即使一个具 体 的机器零件也会 因为形状复杂 而造成分 析的困 难 。因此 , 首先 把 堆 垛 机 的 实 体模 型进 行 适 当的 简 化, 建立刚体的动力学几何模型 。对实 际的机器或 零件进行分析时需采用离散 的方法 , 把他们划分成 有限各形状简单 的单元体进行 动力分析 , 然后再用 子结构法组合成整体机器 的动力学模型。
堆垛机是 自动化立体仓库最重要 的搬运设备 ,
是实 现物资 流 动 的载 体 , 在 高层 货 架 巷 道 往 返运 它
行, 将货物存人或取 出, 从而实现物资的流动 。因此
机械动力学 的方法对其进行分析。针对某公司某型 号 的堆垛机 , 中仔细研究 了它的力学环境 , 文 将其简 化成一定的物理模型 , 采用有限元法对其进行分析 , 并利用大型数值计算 软件 M T A A L B进行求解 , 取得 了预 期 的结果 。