FY系列动平衡机产品说明书
FY系列说明书
京药管械(准)字2003第2540038号(更)产品标准号:YZB/京0033-2003-------------------------------------------------------FY系列医用保健制氧机产品使用说明书本产品通过:欧盟CE0197认证 EN ISO 9001认证 EN IS0 13485认证医疗器械产品质量认证医疗器械质量管理体系认证谢谢您购买亚奥系列产品,使用产品前请仔细阅读本说明书并请阅后妥善保管,以备日后查阅感谢您使用亚奥制氧机亚奥FY系列医用保健制氧机是由我公司在1992年开发、研制成功的中小型系列医用分子筛制氧设备。
产品符合国家食品药品监督管理局颁布的医用分子筛制氧设备通用技术规范(《YY/T0298—1998医用分子筛制氧设备通用技术规范》)的各项标准,并通过了北京市食品药品监督管理局的市场准入审定,可以为您提供可靠的服务。
亚奥制氧机采用压力传感控制模式,按分子筛的最佳工作气压值设定为切换控制点,其优点是一是防止过高的气压对分子筛的破坏;二是在气压低的情况下,包括空压机长期运转磨损供气量下降后,以及海拔升高空气稀薄时,都可自动调整流程程序,防止分子筛的粉化,保证氧气高浓度的产出,从而整体延长了制氧机的使用寿命。
亚奥制氧机采用的是目前国际上领先的低压流程设计,其优点一是产氧速度快,3分钟左右氧气浓度即可达到90%以上;二是低压运行安全、稳定,并可减小各类组件的磨损,又有利于延长制氧机的使用寿命。
亚奥制氧机的品质保证不仅仅体现在保修期比较长,而且还承诺氧浓度保证,具体请参照《保修证书》。
为了让您购置的制氧机能提供满意的服务,请您在使用前详细阅读说明书,全面了解和掌握你所购置机型的性能及正确的操作、维护方法。
特别警告使用亚奥制氧机前,必须认真阅读本说明书,按要求操作,并且在医生的指导下使用。
急需用氧者及重症患者在使用本装置时必须自行配置钢瓶氧、液态氧气系统或氧气袋等备用,应付可能出现的如停电、自然灾害、机器故障等供氧停止现象。
2018-2019-平衡机说明书-精选word文档 (15页)
本文部分内容来自网络整理,本司不为其真实性负责,如有异议或侵权请及时联系,本司将立即删除!== 本文为word格式,下载后可方便编辑和修改! ==平衡机说明书篇一:动平衡机说明书动平衡机使用说明图8 说明1.START 键--开始测量如果代码 C13设置 1, 合上轮罩测量开始 , 〈看 10 章改变操作模式〉如果在测量完毕轮罩打开的情况下按动START 键, 而定位制动处于工作状态时,这时车轮罩打开的情况下车轮也可转动, 要确保车轮转动不会被工具或其他类似的物件所妨碍。
--车轮最多转动半圈就被制动, 从而左侧校正面的平衡块能够安放在主轴的正上方。
2.STOP- 键(1)中断测量(2)清除错误代码(3)如果输入完操作模式后,用STOP键 , 新的状态被自动地删除 ,以前的状态被重新建立图 9 键盘详细使用说明1.OP 键开始说明初步化运行2.精确键,--高分辩度显示总读数1克代替5克或OZ替代(需把精确键按下 )(1)显示最小不平衡极限值以下的残余不平衡量 : 只要按下此键 .实际不平衡值即可显示(2)标准平衡模式下显示不平衡值如果平衡模式Alu1到ALU5 被选择,按下精确键 , 然后按下功能键设定平衡模式。
(3)OP 和 UN 程序中精确键作为转换键使用3.C健(1)轻轻地按下此键 , 转换不平衡读数的主量单位〈克或盎司〉,用 C3 活动代号设置开机时单位。
(2)长时间按下此键 , 转换操作模式4. 轮胎类型功能键持续按下这个键旋转车轮 , 即可选择所需轮胎类型 ,松下此键输入值即被存储。
5. 平衡模式功能键持续按下这个键 ,旋转车轮 ,即可选择所需平衡模式,松开此键,存储输入值。
6. 动静态不平衡显示功能键7. 轮圈宽度 , 直径等功能键图 10 显示板,方向显示,提示操作者1). 左侧较正面的指示器2). 左、右校正面的 OK 指示器3). OP 记号--需要执行最优化运行4). 轮圈符号和上装平衡块的位置5). 右侧较正面的方向指示器6). 轮圈直径符号7). 距离机器的附号(左侧校正面)8). 右侧校正面的数字显示 ( 二位数)--轮圈直径--轮圈 / 机器距离 ( 常用mm)--右侧校正而不平衡值--调整和操作极限值模式的状态9).START 键符号当运行使用START时 START 会显示10). 补偿运行完之后符号11). 轮圈宽度符号l2). 左侧校正面的数字显示屏显示;轮圈宽度右侧校正面不平衡值静态不平衡值错误代码C 代码简单语言的平衡模式篇二:中文全自动平衡机说明书目录1、平衡机综述1.1 概述??????????????????????????????????11.2 技术参数????????????????????????????????11.3 操作者注意事项?????????????????????????????11.4 标准安全设施停止按键??????????????????????????22.平衡机安装????????????????????????????????22.1 机械安装????????????????????????????????22.2 电气连接????????????????????????????????2 3 面板含义?????????????????????????????????33.1 显示面板含义??????????????????????????????33.2 控制面板含义??????????????????????????????33.3 功能转换组合键?????????????????????????????44.安装轮胎?????????????????????????????????44.1 安装主轴丝杆??????????????????????????????44.2 安装轮胎????????????????????????????????4 5 轮辋数据输入方法?????????????????????????????45.1 自动测量输入轮辋数据??????????????????????????45.2 手动测量输入轮辋数据??????????????????????????55.3 加装延伸杆的轮辋数据输入????????????????????????65.4 ALU-S平衡方式尺寸输入法????????????????????????7 6 平衡机校准程序??????????????????????????????76.1 平衡机自校准程序????????????????????????????76.2 自动测量尺校准程序???????????????????????????86.4 系统自检程序??????????????????????????????8 7 车轮平衡操作???????????????????????????????97.1 小汽车及中小型卡车轮胎的平衡??????????????????????97.2 重新计算不平衡值????????????????????????????107.3 实际不平衡值显示????????????????????????????107.4 静态一动态平衡方式???????????????????????????107.5 特殊形状轮辋平衡(ALU-S平衡方式)????????????????????117.6 不平衡的分解??????????????????????????????12 8不平衡最佳化处理功能??????????????????????????13 9 故障排除?????????????????????????????????14 10 日常维修????????????????????????????????14 10.1调整皮带张力??????????????????????????????14 10.2更换保险丝???????????????????????????????14 10.3平衡显示不稳定?????????????????????????????14 11维修操作????????????????????????????????14 11.1推荐备件????????????????????????????????14 11.2检查距离测量尺?????????????????????????????15 11.3检查位置传感器?????????????????????????????15 11.4 安装压力传感器于合适位置????????????????????????15 11.5 轮胎测量和校准平衡。
平衡机操作说明书
显示板显示出要求的平衡重量。使用定位装置 转到加平衡块的两个位置。 按按钮 15 或开始键 10 结束后轮辐位置功能。 LED24 熄灭。
将轮圈夹到平衡机上,确保阀在 12 点钟方向。 按开始键 10,开始测量操作。轮圈的不平衡进 行检测。测量操作后显示如下:
=过程 2
按钮 16:保存数据 在按下按钮 16 后,可以用+/-按钮 4/5
按按钮 15 开始后轮辐定位。LED24 点亮,制 动(任选)打开,LED23 熄灭。
如果外部平衡块的轮胎不在 12 点钟方向,会 响起两次哔哔声表示错误信息。
首先将轮辐转动到 12 点钟方向,保持此位置直 到声音信号确认了位置的转换。 对第二个轮辐重复此操作。同样声音信号确认 了位置。
过程: 按按键 13 激活均衡模式。将轮胎剥离轮圈。 显示区 LED24 点亮,显示以下的信息:
6. 规格
-2-
1. 用户注意事项 这些操作说明适用于 BM10-50 和 S 型号的操作 人员和管理人员。
操作员指的是汽车行业经训练的人员。他们必 须在此种平衡机的操作上受过培训(如在路斯 霸公司培训)
使用本产品意味着你接受下列的条件: 版权: 软件及数据是路斯霸公司或供应商的资 产,受版权法,国际法和其它法律的保护,严 禁私自翻录。禁止私自翻制或出售数据或软件, 违者将受法律惩罚。一旦侵权产生,路斯霸保 留起诉和索取损害赔偿的权利。
-7-
D:再次按 AI 按钮进入下一个程序: -内部粘合重量 -轮辐内部的外部粘合重量
E:再次按 AI 按钮进入下一个程序: -内部夹钳重量 -轮辐内部的外部粘合重量
按按钮 10 开始最后一次测量操作。程序自动从 均衡功能退出,以先前检测的数据开始标准的 测量操作。LED24 在测量结束后熄灭。
轮胎动平衡机的操作使用说 明手册
轮胎动平衡机的操作使用说明手册原答案:【产品说明】 ◆、车轮不平衡会造成振动,使汽车附着力减小,车轮跳动,损坏减振器及其转向零件。
◆、车轮平衡可消除轮胎的振动或使之减小到许可范围之内,这样可避免由此带来的不利影响及其造成的损坏。
◆、本机为带有微电脑的数字显示车轮的平衡机,可平衡最大轮胎的重量65kg。
通过移动测量尺,轮辋直径及衡机至轮辋距离都可自动输入到机器内。
◆、电脑可自动进行“S方式”计算(对于只在内侧加平衡块的铝合金轮辋)。
平衡机有自校准系统,系统可作较宽范围内的调整,故除可平衡普通轮胎外,还可平衡特殊车辆轮胎(摩托车轮胎及赛车轮胎)。
ALU功能还使平衡机用于平衡各种特殊形状的轮辋。
◆、本机还可提供宽度自动输入可选附件,用来自动输入轮辋宽度。
【注意事项】 ◆、在开始使用平衡机前,请认真阅读这操作使用说明手册。
◆、妥善保存手册,以备今后参考。
◆、避免拆去和更改机器零件,否则将影响正常操作,当需要修理时,请与技术维修服务部联系。
◆、清洁机器进不能用压力太高的压缩空气。
◆、用酒清洁塑料板和键盘座(避免酒精中含杂质)。
◆、开始轮胎平衡之前,确认轮胎安全可靠地锁定在连接器法兰上。
◆、操作人员穿紧工作服以防挂住,非操作人员不要开动机器。
◆、避免在平衡机周围放置杂物,以免影响正常操作。
◆、超出平衡机使用手册规定的功能范围,平衡机将不能使用。
提问人的追问 2009-11-29 19:56轮胎动平衡机的操作步骤提问人的追问 2009-11-29 20:18怎样能安全转换轮胎型号回答人的补充 2009-11-29 20:27轮胎动平衡机的具体操作步骤如下:1.清除被测车轮上的泥土,石子和旧平衡块.2.检查轮胎气压,视必要充至规定值.3.根据轮辋中心孔的大小选择锥体,仔细地装上车轮,用大螺距螺母上紧.4.打开车轮平衡机电源开关,检查指示与控制装置的面板是否指示正确.5.用卡尺测量轮辋宽度L,轮辋直径D(也可从胎侧读出),用平衡机上的标尺测量轮辋边缘至机箱距离A,再用键入或选择器旋钮对准测量值的方法,将A,D,L值键入指示与控制装置中去。
FY系列动平衡机产品说明书
FY系列动平衡机产品说明书FY系列数显动平衡机使用说明书浙江省温岭市先导电机技术研究所电话: 86144065E-mail:地址:浙江省温岭市经济开发区二期( 楼山)目录1、概述2、主要技术性能3、基本结构4、基本工作原理5、安装与调试6、操作与使用7、平衡转速与平衡精度8、维护保养及故障排除9、附图一、概述FY型系列动平衡机产品, 可用于中小型电机转子、转轴、转盘、汽车机械, 电动工具等旋转零件, 在电机、轻工、纺织等部门得到广泛运用。
FY型系列动平衡机采用数码显示, 电气测量部分采用CMOS数字集成电路, 该系列产品结构简单、性能稳定、灵敏度高、指示直观、通用性强等优点, 是旋转体平衡工艺的理想设备。
FY型系列动平衡机产品经改动后成为专用机, 以满足一些特殊形状的转子, 倍受广大用户欢迎。
二、主要技术性能三、基本结构3.1基本结构本系列动平衡机基本结构是由机械部分和电气测量部分两大部分组成。
3.1.1机械部分其轮廓可见附后的示意图, 它是由光电系统、弹性支承系统、传感器、传动系统等主要部分组成, 每个系统都有一定的独立性, 用一定的连接方式装在底座系统上。
3.1.2电气测量部分附图中标出了仪表正面的示意图, 标出了主要部分, 有的还简单说明其主要作用。
四、基本工作原理当被测转子由传动和驱动马达组成的驱动系统驱动时, 由于被测转子不平衡量而产生的离心力, 使得由悬挂板簧组成的弹性系统受迫作径向机械振动, 其振动频率等于转子旋转频率, 振动幅值与不平衡量成正比, 机械振动信号经过测振传感器转换成电讯号。
当转子旋转时, 光电头将涂在转子表面的标示线, 经过光敏三极管的通断输出一个脉冲( 其频率与转子旋转频率机同) 此脉冲作为相应基准讯号, 此讯号经锁相倍频后, 得到一个方波信号, 一方面用来测速, 一方面用来控制跟踪滤波器, 同时经分频分相后, 得到二个对称方波讯号, 它的频率与转速相同, 相位与光电基准脉冲对应。
动平衡机简易操作步骤
硬支撑动平衡机简易操作步骤1、做动平衡的前提条件⑴工件必须轴向不能弯曲⑵25kg<工件质量<500kg⑶工件最大直径≤600mm⑷必须称出工件的实际重量2、。
3、调整圈带X力,调整并紧固轴向止动器,轴向止动力不宜过大,不能影响转子前后方向的自由振动,可用加钢球的方法解决。
4、打开整机电源,双击桌面上的动平衡图标〔CAB〕进入平衡测量。
在被测工件上反光较好的位置作一个不反光标记,并将光电传感器探头对准标记后固定。
用手推动工件,当标记经过光电传感器时,传感器指示灯熄灭;在不经过标记时,指示灯应点亮。
将不反光标记最先经过光电传感器探头的一边作为零度,沿工件旋转方向依次往后等分为90°、180°、270°。
5、工件参数设置和系统参数设⑴工件参数设置a _左支撑架中心到工件左配重块的中心距离;b _工件左右两配重块的中心距离;c _右支撑架中心到工件右配重块的中心距离;r1_工件轴径中心到工件左配重块中心的距离;r2_工件轴径中心到工件右配重块中心的距离。
⑵正确设置工件合格X围参数㈠平衡精度等级的合理选用与不平衡量的简化计算公式①平衡精度等级的合理选用:精度等级G 转子类型举例G630 刚性安装的船用柴油机的曲轴驱动件;刚性安装的大型四冲程发动机曲轴驱动件 G250 刚性安装的高速四缸柴油机的曲轴驱动件 G100 六缸和多缸柴油机的曲轴驱动件。
汽车、货车和机车用的〔汽、油、柴油〕发动机整机。
G40 汽车车轮、箍轮、车轮整体;汽车、货车和机车用的发动机的驱动件。
G16 粉碎机、农业机械的零件;汽车、货车和机车用的〔汽油、柴油〕发动机个别零件。
燃气和蒸气涡轮、包括海轮〔商船〕主涡轮刚性涡轮发动机转子;透平增压器;机床驱动件;特殊要求的中型和大型电机转子;小电机转子;涡轮泵。
海轮〔商船〕主涡轮机的齿轮;离心别离机、泵的叶轮;风扇;航空燃气涡轮机的转子部件;飞轮;机床的一般零件;普通电机转子;特殊要求的发动机的个别零件。
飞宇科技FY系列航模平衡仪 FY-30A 多旋翼版本安装说明书
注意: a) 安装和使用本产品需要一定的多旋翼飞机的遥控技巧。 b) 假如您是一个从来都没有进行过任何一次多旋翼飞行操作的初学者,我们建议您别独
自安装本设备。请找有经验的人帮忙,您会需要他们为你提供一些基本知识以便您能成功地使 用本设备。
c) 如果您是一位富有经验的多旋翼飞机操作手,您会发现本设备的安装简单有序。只需 要按照本说明书进行操作就不会有差错。
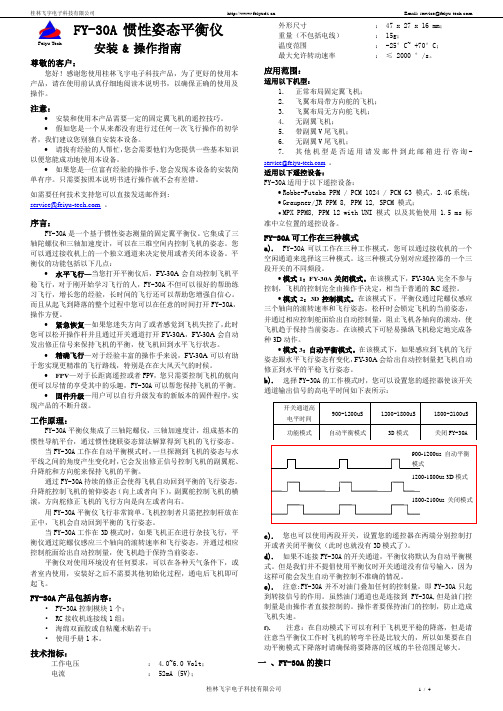
X 字形布局
1 4
2 3
十字形布局
1
ON OFF
1234
X-Type QuadCopter Layout:
1 = ESC 1 2 = ESC 2 3 = ESC 3 4 = ESC 4
CCW CW CCW CW
cw = 顺时针
ccw = 逆时针
ON OFF
1234
4
2
十 - Type Quad Layout:
序言
FY30A 是一个基于惯性姿态测量的固定翼平衡仪。它集成了三轴陀螺仪,三轴加速度计可以 在三维空间内控制飞机的姿态,并且可以通过下载升级固件 V1.20 而用于多旋翼飞机。
适用机型:
FY30A 用于多旋翼可以试用一下机型:X 字形和十字形布局的四轴,三轴等。其他机型是否适 用请发邮件到此邮箱进行咨询:service@。
4. 我们强烈推荐使用我们配置的泡棉减震垫来做减震安装,具体安装方法参见下图。
检查减震安装情况 FOR VIBRATION a) 按照说明书中的建议安装 FY-30A, 并参看螺旋桨转动用法说明书。 b) 在自动平衡模式下发动油门,切记不要起飞! c) 观察红色的工作指示灯的状态。 d) 如果红色指示灯不亮,说明该情况下震动符合要求,可以保持正常工作。如果是红色指示
FY系列动平衡机产品说明书
F Y系列动平衡机产品说明书内部编号:(YUUT-TBBY-MMUT-URRUY-UOOY-DBUYI-0128)FY系列数显动平衡机使用说明书浙江省温岭市先导电机技术研究所h电话:0576-8614412286144065地址:浙江省温岭市经济开发区二期(楼山)目录1、概述2、主要技术性能3、基本结构4、基本工作原理5、安装与调试6、操作与使用7、平衡转速与平衡精度8、维护保养及故障排除9、附图一、概述FY型系列动平衡机产品,可用于中小型电机转子、转轴、转盘、汽车机械,电动工具等旋转零件,在电机、轻工、纺织等部门得到广泛运用。
FY型系列动平衡机采用数码显示,电气测量部分采用CMOS数字集成电路,该系列产品结构简单、性能稳定、灵敏度高、指示直观、通用性强等优点,是旋转体平衡工艺的理想设备。
FY型系列动平衡机产品经改动后成为专用机,以满足一些特殊形状的转子,倍受广大用户欢迎。
二、主要技术性能三、基本结构3.1基本结构本系列动平衡机基本结构是由机械部分和电气测量部分两大部分组成。
3.1.1机械部分其轮廓可见附后的示意图,它是由光电系统、弹性支承系统、传感器、传动系统等主要部分组成,每个系统都有一定的独立性,用一定的连接方式装在底座系统上。
3.1.2电气测量部分附图中标出了仪表正面的示意图,标出了主要部分,有的还简单说明其主要作用。
四、基本工作原理当被测转子由传动和驱动马达组成的驱动系统驱动时,由于被测转子不平衡量而产生的离心力,使得由悬挂板簧组成的弹性系统受迫作径向机械振动,其振动频率等于转子旋转频率,振动幅值与不平衡量成正比,机械振动信号通过测振传感器转换成电讯号。
当转子旋转时,光电头将涂在转子表面的标示线,通过光敏三极管的通断输出一个脉冲(其频率与转子旋转频率机同)此脉冲作为相应基准讯号,此讯号经锁相倍频后,得到一个方波信号,一方面用来测速,一方面用来控制跟踪滤波器,同时经分频分相后,得到二个对称方波讯号,它的频率与转速相同,相位与光电基准脉冲对应。
动平衡机安全操作规程
动平衡机安全操作规程前言动平衡机是用来进行机械设备或零部件的动平衡处理的专用设备。
它可以有效地降低设备运行时的振动,提高设备的使用寿命和稳定性。
然而,不正确的操作和维护可能会导致该设备的故障或事故,对人身和设备造成严重的伤害。
为了保证动平衡机的安全性和稳定性,制定了本操作规程,希望能对使用该设备的人员提供必要的指导,规范操作行为,确保设备的长期安全运行。
适用范围本规程适用于所有使用动平衡机的人员,如维修工程师、检验员和操作工等。
安全准备工作1.初次使用前,必须对设备进行全面检验,如电气、机械、液压系统等。
确保各部件齐全,无个别部件松动、损坏等情况,设备处于正常工作状态。
2.操作前,必须了解设备的结构组成、工作原理,并对使用手册进行认真学习和理解。
如需操作资格,必须进行培训合格后方可操作。
3.操作前,应检查设备是否正确接地,工作环境是否符合安全要求,如地面是否平整、无滑动表面等,设备周围是否存在危险物品等。
4.操作前,必须保证设备没有任何人员或物品在上面,可以正常运转。
操作程序1. 设备的启动及动平衡处理过程1.确保设备处于停止状态,并将处理件安装好,按照设备的启动程序进行操作。
如需进行刹车处理,请先将设备刹车制动器打开,再按照启动程序进行操作。
2.启动设备后,设备将自动进行动平衡处理。
在处理过程中,应密切观察处理件状态,并注意观察设备的运行情况,如有异样及时停止设备运行。
3.完成动平衡处理后,应根据设备的操作程序进行关机处理,确保处理件处于正常位置,将设备刹车制动器关闭,停止设备运行。
2. 突发事件处理1.发生突发事件(如设备出现故障、人员受伤等)时,必须立即停止设备正常运行,进行安全处理。
如遇电气故障,应关闭电源开关,禁止再次使用该设备。
2.对突发事件应及时记录并进行整理,以方便后期对设备进行排查、处理、维护。
3. 维护保养1.设备使用过程中应进行定期维护保养,如油品更换、设备清洗、部件润滑等。
动平衡机操作步骤
动平衡机操作步骤
1.准备工作:先检查动平衡机的各部分机构是否正常,仔细查看被测物件的状态。
2.安装被测物件:将被测物件轴向调整到安装准备位置,安装在夹具上,并确保夹具安装牢固、稳定。
3.标定测试程序:根据被测物件的类型和规格,选择和标定合适的测试程序。
4.启动测试程序:启动测试程序,等待被测物件平衡后停止,检查平衡结果是否符合技术标准要求。
5.调整测试参数:若平衡结果不符合技术标准要求,根据测试程序提示调整测试参数来达到最好平衡结果。
6.发布报告:测试完成后,根据测试数据和结果,发布测试报告。
7.清理工作:清理动平衡机和夹具,保存测试数据记录。
平衡机操作说明书
操作区 4/5 +/-:增加或减少机器的轮圈距离输入 6/7 +/-:增加或减少轮圈宽度输入 8/9 +/-:增加或减少轮圈直径输入 10 Start:开始每项程序功能 11 Stop/Pos:关闭激活的功能/
激活/关闭制动功能 12 确认输入/选择菜单 13 铝/钢程序选择 14 激活均衡程序 15 激活后轮辐位置 16 保存当前的轮圈数据 17 提取储存的轮胎数据
F2 试用 按输入键 12 开始试用。试用可以使可能存在的 夹具的不平衡对结果造成的影响最小化。 试用的显示如下:
=以盎司显示 按输入键 12 确认所选的单位。
F4:出厂设置 按输入键 12 复位到出厂设置。 复位显示在屏幕上约 4 秒,如下:
F5:标定 按输入键 12 开始标定。机器在使用 500 个循环 之后,必须重新调整。重新调整保证了测量值 的稳定质量。只有用附上的标定重量和中心安 装的标准夹具才能进行标定。你可以将板上的 标定重量加在左后边以进行保存。 标定操作显示如下:
=轴在绝对垂直的位置
=轴在任意的位置
按钮 13:ALU 程序选择 使用 AI 按钮在 8 个不同的平衡程序间 选择。所选的程序在显示区的 18 和 19 显示。
=自动操作关闭 按输入键 12 确认选择。
F7:挤压/舍入 在按输入键 12 之后,你可以使用+/-按钮 4/5 调整变化量为 1 克或 0.1 盎司的挤压值。 所有比此设置更小的检测值会显示为 0。
按钮 14:均衡 如果系统在测量操作的最后检测到大于 30 克 的不平衡值,LED20 点亮。使用均衡程序分别 检测轮圈和轮胎的不平衡,以便达到最优化的 安装。
程序: 开始测量操作,用定位装置 2 同平时一样将平 衡块加在轮圈的里面。用手调节车轮,使用定 位装置 2 或按按钮 Pos.11,到外部平衡块的 12 点钟方向。
动平衡机操作流程及注意事项

动平衡机操作流程及注意事项下载温馨提示:该文档是我店铺精心编制而成,希望大家下载以后,能够帮助大家解决实际的问题。
文档下载后可定制随意修改,请根据实际需要进行相应的调整和使用,谢谢!并且,本店铺为大家提供各种各样类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,如想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by theeditor. I hope that after you download them,they can help yousolve practical problems. The document can be customized andmodified after downloading,please adjust and use it according toactual needs, thank you!In addition, our shop provides you with various types ofpractical materials,such as educational essays, diaryappreciation,sentence excerpts,ancient poems,classic articles,topic composition,work summary,word parsing,copy excerpts,other materials and so on,want to know different data formats andwriting methods,please pay attention!动平衡机是一种用于测量和校正旋转物体不平衡量的设备。
以下是一般动平衡机的操作流程及注意事项:操作流程:1. 准备工作:确保动平衡机安装牢固,周围环境清洁,无杂物干扰。
动平衡机操作说明
动平衡机操作说明
1.清除被测车轮上的泥土,石子和旧平衡块;
2.检查轮胎气压,视必要充至规定值;
3.根据轮辋中心孔的大小选择锥体,仔细地装上车轮,用大螺距螺母上紧;
4.打开车轮平衡机电源开关,检查指示与控制装置的面板是否指示正确;
5.用卡尺测量轮辋宽度L,轮辋直径D(也可从胎侧读出),用平衡机上的标尺测量轮辋边缘至机箱距离A,再用键入或选择器旋钮对准测量值的方法,将A,D,L值键入指示与控制装置中去;
6.放下车轮防护罩,按下起动键,车轮旋转,平衡测试开始,自动采集数据;
7.车轮自动停转或听到“DI”声后按下停止键并操纵制动装置使车轮停转后,从指示装置读取车轮内,外不平衡量和不平衡位置;
8.抬起车轮防护罩,用手慢慢转动车轮。
青岛欧派汽车维修保养介绍,当指示装置发出指示(音响,指示灯亮,制动,显示点阵或显示检测数据等)时停止转动。
在轮辋的内侧或外侧的上部(时钟12点位置)加装指示装置显示的该侧平衡块质量。
内外侧用分别进行,平衡块装卡要牢固;
9.安装平衡块后有可能产生新的不平衡,就重新进行平衡实训,直到不平衡量 10.测试结束,关闭电源开关。
FY说明书
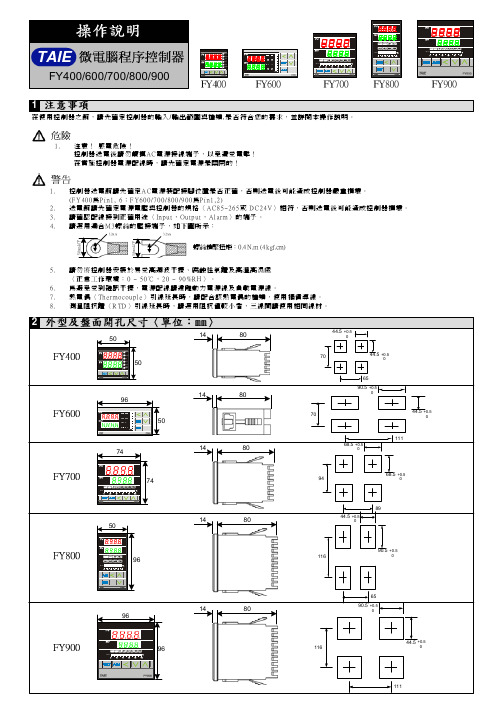
1.注意!感電危險!控制器送電後請勿觸摸AC 電源接線端子,以免遭受電擊!在實施控制器電源配線時,請先確定電源是關閉的!FY400/600/700/800/9001.控制器送電前請先確定A C電源裝配接腳位置是否正確,否則送電後可能造成控制器嚴重損壞。
(FY 400為Pi n1, 6;F Y600/700/800/900為P in 1,2)2.送電前請先確定電源電壓與控制器的規格〈AC 85~265或 DC 24V〉相符,否則送電後可能造成控制器損壞。
3.請確認配線接到正確用途〈I n p u t,Ou tp u t,Alar m〉的端子。
4.請選用適合M3螺絲的壓接端子,如下圖所示:5.請勿將控制器安裝於易受高週波干擾、腐蝕性氣體及高溫高濕處〈正常工作環境:0 ~ 50℃,20 ~ 90%R H 〉。
6.為避免受到雜訊干擾,電源配線請遠離動力電源線及負載電源線。
7.熱電偶〈Th er mo co u p le〉引線延長時,請配合該熱電偶的種類,使用補償導線。
8.測溫阻抗體〈RT D〉引線延長時,請選用阻抗值較小者,三線間請使用相同線材。
在使用控制器之前,請先確定控制器的輸入/輸出範圍與種類,是否符合您的需求,並詳閱本操作說明。
FY400FY600FY700FY800FY900143.2mm3.2mm螺絲鎖緊扭矩:0.4 N.m (4 kgf.cm)5050AT OUT1OUT2PV 序值(P V ) /數名稱顯的感測值 / 參數段顯示器〉SV 定值(S V 值(Set Va lu e 數目前的設定值段顯示器〉SET 定鍵完成時,按下此顯示時,按下此減少鍵*鍵減少設定值*增加鍵*鍵增加設定值*OUT1T1動作指作時,此燈亮〈綠OUT2T2動作指作時,此燈亮〈綠AT 動演算指時,此燈亮〈橙AL1m1動作報動作時,紅色〉AL2m2動作報動作時,*OU T1輸出百分比顯示十個L ED 對應顯示控制輸出百分比。
飞宇科技FY系列航模平衡仪 FY-30A 固定翼版本说明书
FY-30A惯性姿态平衡仪安装&操作指南尊敬的客户:您好!感谢您使用桂林飞宇电子科技产品,为了更好的使用本产品,请在使用前认真仔细地阅读本说明书,以确保正确的使用及操作。
注意:∙安装和使用本产品需要一定的固定翼飞机的遥控技巧。
∙假如您是一个从来都没有进行过任何一次飞行操作的初学者,我们建议您别独自安装本设备。
∙请找有经验的人帮忙,您会需要他们为您提供一些基本知识以便您能成功地使用本设备。
∙如果您是一位富有经验的操作手,您会发现本设备的安装简单有序。
只需要按照本说明书进行操作就不会有差错。
如需要任何技术支持您可以直接发送邮件到:service@。
序言:FY-30A是一个基于惯性姿态测量的固定翼平衡仪。
它集成了三轴陀螺仪和三轴加速度计,可以在三维空间内控制飞机的姿态。
您可以通过接收机上的一个独立通道来决定使用或者关闭本设备。
平衡仪的功能包括以下几点:∙水平飞行—当您打开平衡仪后,FY-30A会自动控制飞机平稳飞行,对于刚开始学习飞行的人,FY-30A不但可以很好的帮助练习飞行,增长您的经验,长时间的飞行还可以帮助您增强自信心。
而且从起飞到降落的整个过程中您可以在任意的时间打开FY-30A,操作方便。
∙紧急恢复—如果您迷失方向了或者感觉到飞机失控了,此时您可以松开操作杆并且通过开关通道打开FY-30A,FY-30A会自动发出修正信号来保持飞机的平衡,使飞机回到水平飞行状态。
∙精确飞行—对于经验丰富的操作手来说,FY-30A可以有助于您实现更精准的飞行路线,特别是在在大风天气的时候。
∙FPV—对于长距离遥控或者FPV,您只需要控制飞机的航向便可以尽情的享受其中的乐趣,FY-30A可以帮您保持飞机的平衡。
∙固件升级—用户可以自行升级发布的新版本的固件程序,实现产品的不断升级。
工作原理:FY-30A平衡仪集成了三轴陀螺仪,三轴加速度计,组成基本的惯性导航平台,通过惯性捷联姿态算法解算得到飞机的飞行姿态。
动平衡机操作规程(完)

多功能硬支承平衡机操作规程工作准备1、操作人员必须经过培训的且具有操作能力的工作人员,必须熟悉平衡机的性能,掌握操作动平衡机的功能,非动平衡机操作者不允许私自开启动平衡试验机;2、动平衡机在启动前需要检查电机、皮带、工装等部件是否处于良好状态。
检查动平衡实验机的各各电线接头是否连接牢靠,有无松动现象,润滑部位要加油润滑;3、在实验操作的过程中,应站到操作台位置处,并且一定要将防护罩移动到指定的位置,以防止工件在转动的过程中添加物松动飞出对工作人员造成伤害;4、准备好要做动平衡试验的工件以及实验工件所用的工装。
工作期间1、操作流程2、键盘介绍1、“SET定标”功能键,作定标参数设定用,一下用(S)表示。
2、“HALT选停”功能键,用作删除按键。
在定标过程中作停止及记录用,详见“平衡机定标操作”。
以下用(H)表示。
3、“+/-”功能键,在测量时为加重和去重方式的切换,详见“测平衡操作”;在转子参数设置中又作滚动指针用,详见“基本参数设置”。
以下用(+)表示。
4、“QUIT退出”功能键,作各子界面退回到主菜单用,详见各界面操作提示。
一下用(Q)表示。
5、“0~9”为数字键,主要用于数字设定及修改。
6、“*”为小数点的输入键。
在测量过程中作打印功能键,在转子参数设置中又作翻页用,详见“基本参数设置”。
一下用(*)表示。
7、“EXE执行”功能键,为回车确认键。
一下用(E)表示。
注:1、外接的键盘接口(作为选件)可从前面板插入。
操作与上述按键对应。
3、操作使用打开电源开关,计算机自动完成自检后,直接进入测量界面。
在测量界面中按(Q)退到主菜单界面。
主菜单左下角的数据为现在所选着的参数,可以通过“设参数”来修改。
右下角有5个子菜单,按对应的数字键来选着,光标指针指到该选择项后按(E)进入该子菜单。
在进入平衡操作前应注意所用平衡的转子类型是否选择好并且是否已做过参数设定,如未设定则应按以下步骤处理。
1、转子型号选择在主菜单上选择数字键“4”,然后按执行键(E),进入参数设置界面。
动平衡机操作流程

动平衡机操作流程
动平衡机是一种用于实时监测和调整转子动态均衡性能的重要机械设备。
它能检测和控制转子轴线、轴内基准轴上的轴向动量、转子级数的振动等性能指标,以保证转子的正常操作。
下面介绍动平衡机的操作流程:
1.准备工作:在操作前需要先进行现场准备,包括检查转子驱动型号对应,检查并确认平衡机产品型号,确定转子装载位置,确定安装位置,检查各部件连接方式是否正确,检查链接螺栓是否松动,并确保电源供应可靠。
2.连接线路:安装完成后,需要进行线路连接,线路连接包括框架电缆的接线绝缘,动平衡机与转子的线路接线,以及与主机和控制台的连接。
3.调试设备:调试设备时,需要先根据设备文件内容确定设备各部件参数,然后进行操控台的初始化调试,确保动平衡仪表正常。
最后,仔细检查各项性能指标,确保性能指标符合设备要求。
4.调整平衡:对已安装完毕的转子进行平衡调整,首先开启动平衡机,经过几次测试,确定轴向动量等性能指标,然后根据这些指标调整转子的平衡并保持转子的正常操作,并定期检测调整。
5.检查和确认:在进行完调整后,需要检查和确认转子的性能指标是否达到设定要求,以保证转子的正常操作。
以上内容为动平衡机的操作流程,进行操作前需要仔细阅读操作动平衡机的操作手册,确定安装环境,根据操作规范进行操作,在实
施过程中需要谨慎,注意安全,以免出现意外情况。
此外,一个有效地动平衡技术,可以帮助企业提高转子的生产效率,并为企业的技术进步做出贡献。
飞宇科技 FY-91Q惯性姿态平衡仪说明书

FY-91Q惯性姿态平衡仪说明书工作原理:惯性姿态平衡仪(AFSS)FY-91Q 是一款先进的多旋翼惯性姿态平衡仪(简称AFSS)和简易自动驾驶仪。
FY-91Q集成了三轴陀螺仪和三轴加速度计,组成一个精确无漂移的惯性姿态平衡系统。
同时,它利用GPS和气压传感器获得飞行器精确的三维定位。
通过结合姿态控制和定位,实现惯性导航和自动驾驶。
支持固件升级,通过升级不同的固件可以用于4轴飞行器,6轴飞行器,Y型6电机的飞行控制。
FY91Q不但可以实现多旋翼飞行的稳定控制,还能实现位置悬停和自动返航等功能。
气压计和GPS & COMPASS模块FY-91Q控制模块集成了一个气压传感器,用来测量和起飞点的相对高度。
在GPS&COMPASS模块中集成了三轴的磁场传感器和GPS模块,用于测量飞行航向和位置。
FY91Q不连接GPS&COMPASS模块时只能实现自动平衡和稳定飞行,不能实现自动悬停和自动返航。
FY-91Q连接GPS&COMPASS模块在上电后就开始搜索GPS定位信号,当首次检测到GPS定位并且使用的定位卫星大于5颗星后FY-91Q会记录当前的位置为返航点。
设备功能:FY-91Q惯性姿态平衡仪●稳定和自动平衡—FY-91Q 可以在任意天气情况下自动保持飞机的水平飞行姿态。
这对于刚开始学习飞行的人,操作飞行器非常的简单和容易。
当你感觉飞机要失控的时候只要稳定飞行的油门,松开操作杆,就可以自动恢复到水平状态。
●自动悬停—连接GPS&COMPASS模块后就可以实现自动悬停,GPS定位后切入自动悬停模式可以保持飞行器在一定范围和高度上自动悬停。
当推动操作杆时候可以改变飞行器的位置,当松开操作杆后就会自动悬停到新的位置。
●自动返航--连接GPS&COMPASS模块后就可以实现自动返航,GPS定位后切入自动返航模式,飞行器会保持当前的高度自动飞回返航点,然后保持悬停。
可选择的通过AP117和数传电台的功能升级FY-91Q提供了一个可选择的数据接口,可以结合AP117 和FY数传电台使用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
FY系列数显动平衡机
使
用
说
明
书
浙江省温岭市先导电机技术研究所
h
电话:0576-8614412286144065
地址:浙江省温岭市经济开发区二期(楼山)
目录
1、概述
2、主要技术性能
3、基本结构
4、基本工作原理
5、安装与调试
6、操作与使用
7、平衡转速与平衡精度
8、维护保养及故障排除
9、附图
一、概述
FY型系列动平衡机产品,可用于中小型电机转子、转轴、转盘、汽车机械,电动工具等旋转零件,在电机、轻工、纺织等部门得到广泛运用。
FY型系列动平衡机采用数码显示,电气测量部分采用CMOS数字集成电路,该系列产品结构简单、性能稳定、灵敏度高、指示直观、通用性强等优点,是旋转体平衡工艺的理想设备。
FY型系列动平衡机产品经改动后成为专用机,以满足一些特殊形状的转子,倍受广大用户欢迎。
二、主要技术性能
三、基本结构
3.1基本结构
本系列动平衡机基本结构是由机械部分和电气测量部分两大部分组成。
3.1.1机械部分
其轮廓可见附后的示意图,它是由光电系统、弹性支承系统、传感器、传动系
统等主要部分组成,每个系统都有一定的独立性,用一定的连接方式装在底座系统上。
3.1.2电气测量部分
附图中标出了仪表正面的示意图,标出了主要部分,有的还简单说明其主要作用。
四、基本工作原理
当被测转子由传动和驱动马达组成的驱动系统驱动时,由于被测转子不平衡量而产生的离心力,使得由悬挂板簧组成的弹性系统受迫作径向机械振动,其振动频率等于转子旋转频率,振动幅值与不平衡量成正比,机械振动信号通过测振传感器转换成电讯号。
当转子旋转时,光电头将涂在转子表面的标示线,通过光敏三极管的通断输出一个脉冲(其频率与转子旋转频率机同)此脉冲作为相应基准讯号,此讯号经锁相倍频后,得到一个方波信号,一方面用来测速,一方面用来控制跟踪滤波器,同时经分频分相后,得到二个对称方波讯号,它的频率与转速相同,相位与光电基准脉冲对应。
五、安装与调试
5.1安装
本系列产品中,FY-2型、FY-5型、FY-16型机械部分和仪表部分直接放置在较为坚固的工作台上,机械部分最好放置于平整的水泥台面上。
FY-50和FY-100型动平衡机的机械部分安装在基础底座上。
5.2调试
5.2.1机械部分检查
松开机械部分锁紧装置,用手轻轻拨动轴支承部分,支承部分应振动平稳、无卡
滞现象,按被校转子的长度调节二个摆架间的距离,尽可能使转子的二个轴承档放在V型架上或支承轴承上,调节摆架高度,使转子处于水平状态,当转子旋转时,转子不会向左右窜动,V型架或支承轴承上应放润滑油,以减少摩擦,转子轴承档处应光洁无杂物,以免影响测试精度。
5.2.2仪表部分调试
打开仪表开关,初调各旋钮位置如下:
5.2.3机械部分与仪表部分的信号联连
5.2.4光电传感器调节
将被平衡工件安置在支承架上,在工件表面或侧面选一反光面,并在反光面上加贴一块长、宽约5毫米的反光标志(可涂上黑漆或用黑色油性记号笔、黑色电工胶布等),要求工件转动一周仅能有一处不反光,其它处均反光。
如被平衡工件反光面光洁度不够,请用砂布将表面砂光。
调节光电传感器的高低,使其与被平衡工件中心位置等高(以黑色标记处为
准),光电传感器上的两光孔距离5-15mm
5.2.5转速、方位检查
启动动平衡机,调节仪器上光电调节旋钮,使仪器转速显示到计算转速左右。
转速可按下式估算:
工件转速=马达转速×驱动轮直径/工件拖动部分直径
例如:电动机转速为2800r/min,皮带轮直径为40,转子直径为30,则仪器上的转速显为40/30×2800=3.733千转/分左右即可。
被平衡转子实际转速的验证方法:拔动仪表轻重开关,这时仪器显示的轻重方位应相差180度。
当仪器转速显正常时,仪器才能正常工作。
注:(为避免电网周波干扰,平衡转速应避开3000转/分)。
如果转速显示不稳定,应重新调整光电传感器,直至转速稳定。
方位计算方法:以划黑线为基准向转动方向计算槽数。
划黑线处为零位如方位等分数为6,则划黑线既是0位又是6位。
例:黑色标记黑色标记
6.1
制作“标准转子”是大批量校验转子中的第一只转子,用来作“平面分离”用,因此制作“标准转子”是校验大批量转子时第一道步骤。
“标准转子”是从一种型号的批量中任选一只转子,不过要求轴承档处光洁、平整、无杂物。
按上述方法放好转子后,启动马达,待转速稳定后,选偏量较大一面所指示的
方位加试块(如A面方位为2.0,则在A面2.0位置上加垫片)然后启动马达观看偏量有无变化,此时如变化不大,方位在移动,取下试块,向方位变动的方向上移动一定距离加试块(如这时方位反映在3.0,则应取下2.0位置的垫片加在2.5的位置,如这是方位反映在1.0,则应取下2.0位置的垫片,加在1.5位置上即可)在校正时A、B两面应交叉进行,直到“标准”为止。
6.2操作与使用
在工件批量平衡之前,为提高平衡效率,须首先按工件对平衡机进行调试,即平面分离。
这需要用一个平衡好的“标准工件”对仪器进行调试。
平面分离
平面分离的作用是为了克服在A面去重、加重时,B面偏量会有变化,在B面去重、加重时,A面偏量会有变化。
方法如下:一般采用加重法(开关处于重位置)在标准转子的B面任一位置上加重(如2.0位置上),启动平衡机后,调整A面分离旋钮,使A面偏量显示为以前数值或最小,这时观看B面方位反映是否在2.0位置附近,如不是则调整光电头与样记处的位置或角度,直到在2.0位置附近(由于转子时校好的,则在2.0位置上加上垫片后,2.0位置上应重),取下B面试重,加到A面任一位置上,启动平衡机后调整B面试重,加到A面任一位置上,启动平衡机后调整B面分离旋钮,使B 面偏量显示为以前数值,取下标准转子,即可进行批量平衡工作。
七、平衡转速与平衡精度
电机的实际转速与转子被平衡的转速无关,而是与残余的平衡量有关。
残余不平衡量,电机实际转速,转子的质量、转子的半径及平衡精度几者关系如下式:
即m=eM/r(g)m:转子的残余不平衡量(g)
e:允许偏移量(μm)[与平衡精度成反比,与电机转子成
反比]
M:为转子的质量(Kg)
r:为转子的半径(mm)
八、维护、保养及故障排除
8.1维护保养
8.1.1初次使用本机时,必须详尽阅读和“消化”本机的使用说明书,以便能按规
定要求正确使用本机。
8.1.2使用前要根据各个部分的要求,全面检查一下本机各部分安装连接是否正确。
8.1.3装置驱动带时,通过调整尽量使驱动带与工件的前后夹角一致,使驱动带对工
件的压力垂直于地面,并用手驱动转子,观察转子转动是否正常,应避免转子转动部分碰撞支架,轴向窜动可以使用防窜装置。
8.1.4仪器调试后,不可移动光电传感器位置,以免造成角度偏差,光电孔的镜片和
光敏管头要保持干净,应避免脏物遮光。
8.1.5仪器不宜放在强光源下或阳光能照射到的地方工作,否则会影响光电头的正
常工作。
8.1.6若工件初始不平衡量大,或其它因素造成摆架大幅度振动时,应先调整两边
锁紧螺丝,使其振动幅度变小,以保护传感器。
若发现因不平衡量太大导致工件跳动,就应减小电机O型圈带,降低平衡转速,否则仪器显示不正确。
平衡转速应避免与电机转速相同或相近。
8.1.7避免异物掉入支承墙内,以免影响摆架正常工作。
8.1.8工作时,转子轴颈与本机V型支承块接触处,应经常加油润滑(如支承块为
塑料时,磨损太厉害时应当更换)。
8.1.9若电网波动大,超过额定电压的±10%时,则应配用稳压电源。
该套设备应可靠接地,防止发生意外。
仪表各调节旋钮,调节好后不要随意乱动。
O型带松紧程度以能驱动转子,稳定转速为宜,不可过紧。
搬运本机时,应将两边锁紧螺丝锁紧,以保护传感器。
本机不得在露天存放,长期不用时应加防尘罩,机械部分要上防锈油,使用后应及时保养。
8.2故障排除
光电传感器
A
(安装在支架里面的,后面装有孔与仪表、后面板、B 面插孔相
底座
万向磁座开关
传感器A (安装在支架里面的,后面装有3芯信号插孔与仪表、后面板、A 面插孔相连)
反映转子在平衡机上的实际转速
仪表前面板
A 面偏量A 面方位转速
B 面方位B 面偏量(反映B 面振动大小)
(反映B 面轻或重的位置)
手动锁
定
去
重时至于重的位置
动平衡仪表后面板与动平衡机连接方式:皮带。