常用三维移动扫描车型号及参数(精)
放射科领域新设备--移动三维C型臂X光机PLX7200

移动三维C型臂X光机PLX7200本款C型臂X光机产品可广泛应用于骨科、外科、矫形外科、泌尿外科、脊柱外科、腹部外科、疼痛科、消化科、妇科及手术室等,大幅度拓宽骨科手术范围,提高诊治水准。
同时,该款C型臂X光机设备可支持骨组织活检、脊柱椎弓根螺钉植入术、长管状骨髓内钉固定术、及适合采用螺钉固定的手、足骨折手术等骨科、创伤科复杂诊治。
PLX7200型移动式三维C型臂临床应用范围:PLX7200型移动式三维C型臂广泛应用于骨科、外科、矫形外科、泌尿外科、脊柱外科、腹部外科、疼痛科、消化科、妇科及手术室等,大幅度拓宽骨科手术范围,提高诊治水准。
支持骨组织活检、脊柱椎弓根螺钉植入术、长管状骨髓内钉固定术、及适合采用螺钉固定的手、足骨折手术等骨科、创伤科复杂诊治。
PLX7200型移动式三维C型臂七大优势:优势一、高品质数字化影像链,铸就精确、卓越图像品质1、数字化高频高压发生器,采用微焦点,提供更高系统分辨率和几何清晰度。
2、X线管组件等核心部件为自主研发、生产,以专业的技术提供给您高品质X射线源。
优势二、专业影像采集、处理系统,达到医院高水平诊断要求1、全数字化图像采集、处理系统,为您提供高清影像,支持您做出精确诊断。
2、百万像素以上的数字图像存储;12bit采集与输出。
3、标配两台19寸1兆屏高清医用监视器,以专业的品质呈献给您大尺寸无失真图像。
4、通过高对比度和高亮度显示系统,图像层次更加丰富、细腻,用户能够准确、清晰地观察到低密度超微病灶。
优势三、智能化数字脉冲剂量控制技术全面降低射线危害,呵护医患健康1、自主开发掌握了国内领先的数字脉冲剂量智能控制技术,达到欧盟医疗器械相关要求。
2、真正实时、连续脉冲透视技术的应用,实现多频率任意调节,瞬时高毫安输出,为精确诊断提供高质量图像,同时保证了低剂量。
优势四、全等中心四维电动设计,突破传统带来全新临床体验1、C形臂机架采用等中心设计理念,支持中心区域锥形束扫描成像,为临床诊断提供优质影像。
便携式三坐标测量机一览表及技术规格

便携式三坐标测量机一览表及技术规格什么是便携式三坐标测量机?便携式三坐标测量机是一种移动式三坐标测量设备,也称为便携式CMM。
它可以测量物体的形状、尺寸、位置、角度等几何特征。
便携式三坐标测量机可以应用于汽车、飞机、制造业、航空航天、船舶等行业,在维修、检验等方面有很大的用处。
便携式三坐标测量机的优点•移动性强,适用于现场测量和实地勘探;•准确度高,精度可以到达微米级别;•测量速度快,便于快速获取数据;•操作简单,不需要复杂的操作和编程技能。
便携式三坐标测量机技术规格技术参数型号A 型号B 型号C测量范围(mm)300x300x300 600x600x600 1000x1000x1000测量精度(μm) 2.5+L/300 3.0+L/200 4.0+L/100重复性误差(μm) 1.5 2.0 2.5测量速度(mm/s)100 150 200测量软件I++DME PC-DMIS Measuremind 3D通信接口USB、WiFi USB、RS-232 Bluetooth、WiFi注:L为测量长度(mm)便携式三坐标测量机型号与价格一览表型号适用范围价格(万元)PXM 60 零部件测量 4.5-6.5WM 100 矿产勘探 5.5-7.5HPPM 200 飞机维修8.5-10.5VDM 300 汽车制造12.5-15.5MM 400 船舶维护18.5-20.5便携式三坐标测量机的应用领域汽车制造汽车制造需要对轮廓、尺寸、孔距等进行精确测量。
便携式三坐标测量机可以测量整个汽车的几何特征、轮胎的轮距、轴距、车轮垂直度和制动器尺寸等关键参数,确保汽车的质量。
飞机维修飞机是一种十分复杂的机器,需要经常进行检验和维修。
便携式三坐标测量机可以测量飞机的表面、结构、引擎、机翼等部件的尺寸和位置。
这样,维修人员可以准确地定位问题,并采取正确的措施。
制造业在制造业中,便携式三坐标测量机可以进行零件加工的精确度检测、对零件进行测量等。
3D扫描仪参数

江苏农林职业技术学院
机电工程学院
三维扫描仪技术参数
一、拍照式三维扫描仪
型号(项目)VTOP200B
二、手持式激光三维扫描仪
型号(项目)VTOP600H 生产企业天津微深科技有限公司品牌VTOP
型号600H
重量小于1kg
尺寸315*165*105毫米
光源形式三束交叉激光线以及一束可以单独工作的激光线,共计
7束激光线,高速扫描
激光发射位置所有激光由同一位置发出,最大限度避免多位置多角度发射激光而产生遮挡和相互干扰
白光补偿启动照度阀值35LX
切换单束激光扫描深孔及
死角
支持
扫描速率265,000次测量/秒
激光类别Ⅱ级(人眼安全)
分辨率0.05毫米
精度最高0.03毫米
体积精度1
(单独使用扫描仪)
0.02毫米+0.08毫米/米
基准距300毫米
景深250毫米
输出格式. ply、.xyz、.dae、.fbx、.ma、.obj、.asc、.stl等,可定制工作温度5~40℃
接口方式采用千兆网线连接,能支持远距离正常工作价格22.8万元
三、桌面SLA打印机
四、双喷头FDM印机。
移动C臂X光机技术规格要求
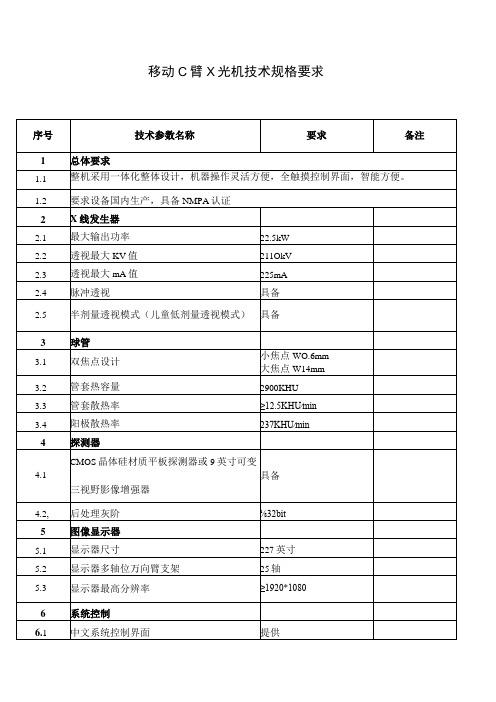
3
球管
3.1
双焦点设计
小焦点WO.6mm
大焦点W14mm
3.2
管套热容量
2900KHU
3.3
管套散热率
≥12.5KHU∕min
3.4
阳极散热率
237KHU∕min
4
探测器
4.1
CMOS晶体硅材质平板探测器或9英寸可变
三视野影像增强器
具备
4.2,
后处理灰阶
⅛32bit
5Байду номын сангаас
图像显示器
5.1
显示器尺寸
227英寸
7.4
C臂旋转角度
2±205°
7.5
C臂最低水平位投照高度
≤102cm
8
图像处理功能
8.1
图像存储
2100,OOO幅
8.2
透视存储功能
具备
8.3
负片技术
具备
8.4
USB端口及存储格式
具备
8.5
实时金属修正功能
具备
8.6
标准DICOM功能
具备
移动
序号
技术参数名称
要求
备注
1
总体要求
1.1
整机采用一体化整体设计,机器操作灵活方便,全触摸控制界面,智能方便。
1.2
要求设备国内生产,具备NMPA认证
2
X线发生器
2.1
最大输出功率
22.5kW
2.2
透视最大KV值
211OkV
2.3
透视最大mA值
225mA
2.4
脉冲透视
具备
2.5
半剂量透视模式(儿童低剂量透视模式)
5.2
常用测量机器人型号及参数(精)
常用测量机器人型号及参数测量机器人型号1:SRX测量机器人仪器介绍:索佳超级测量机器人可实现对目标的快速判别、锁定、跟踪、自动照准和高精度测量,可以在大范围内实施高效的遥控测量。
使您在遥控测量操作中的那些烦恼成为历史。
该系统由索佳新一代全站仪SRX和索佳超级目标捕捉系统组成。
系统特点:索佳超级测量机器人可实现对目标的快速判别、锁定、跟踪、自动照准和高精度测量,可以在大范围内实施高效的遥控测量。
使您在遥控测量操作中的那些烦恼成为历史。
该系统由索佳新一代全站仪SRX和索佳超级目标捕捉系统组成。
超级目标捕捉系统由镜站端可发射扇形光束的RC遥控器和测站端SRX系列全站仪上的光束探测器组成;光束探测器能敏锐地感知RC遥控器所发出的瞬间光信号,并驱动全站仪快速地指向目标,对目标进行精确照准和测量。
系统内置智能方向传感器可以判别和锁定指定目标,实现对目标的智能跟踪。
超级目标捕捉系统驱动全站仪快速照准棱镜所在方位,并对目标实施高精度的自动照准和测量。
超级目标捕捉系统能够驱动全站仪自动照准和锁定目标棱镜,测量过程中移动棱镜时即使出现影响目标通视的障碍物(如建筑、树木、汽车等物体),仪器也能锁定目标棱镜,确保测量工作的正确进行。
在地形复杂的条件下作业时,测量人员只须注意脚下的路面,而不必太在意棱镜的姿态。
即使目标棱镜暂时失锁,只须在镜站方发出搜索指令,仪器便可快速地重新锁定目标。
即使镜站附近有其他反射棱镜也不会产生误测,超级目标捕捉系统会驱动全站仪锁定和照准正确的棱镜。
技术性能参数:测量机器人型号2:GPT-9000A彩屏 WinCE测量机器人仪器介绍:彩屏 WinCE测量机器人采用最安全的1级激光,无棱镜测距达2000m,再一次打破了无棱镜测距的极限。
系统特点:■ 采用最安全的1级激光,无棱镜测距达2000m,再一次打破了无棱镜测距的极限■ 配备自动追踪,自动照准功能和Windows CE操作系统;跟踪速度达15°/秒,可以用于几乎所有的测量领域■ 红色激光指向:装有红色、极小光点激光指示器,轻松可知被测点位置,方便用户定向或放样作业■ XTRAC 棱镜跟踪技术:●瞬间重捕跟踪锁定技术●拓普康第三代快速锁定技术●快速锁定技术和IR通讯技术的完美结合■ 高级系统设计:仪器端和反光镜端均为无线连接●Windows CE操作系统●彩色触摸屏幕●新型、超快速伺服马达驱动■ 内置无线电通讯系统:●内置2.4GHz SpSp无线电通讯系统●集成在仪器的侧面板中●可选配用于FC-200 的RS-1电台模块■ 新型的FC-200野外控制器:●内置蓝牙无线通讯模块●Inetl XScale520MHz CPU ●Windows CE操作系统●彩色触摸屏幕●可选配RS-1电台模块■ 真正无线连接的系统:●GPT-9000A测量机器人●FC-200野外控制器●RS -1电台模块●轻便的360°棱镜●功能强大的TopSURV 软件技术性能参数:测量机器人型号3:GTS-900A测量机器人产品特点:彩屏 WinCE测量机器人您工作中最佳助手,配备自动追踪,自动照准功能和Windows CE操作系统,跟踪速度达15°/秒;可以用于几乎所有的测量领域。
三维激光扫描系统技术参数

三维激光扫描系统技术参数一.仪器精度:(1)点位精度:3 mm @ 50 m; 6 mm @ 100 m(2)距离精度:1.2 mm + 10 ppm(3)角度精度:8" / 8"(垂直/水平)(4)标靶获取精度:2 mm @ 50 m(5)双轴补偿器:实时机载液态传感器形式的双轴补偿,可选开/关,分辨率1’,补偿范围+/- 5’,补偿精度1.5"二.激光扫描:(6)激光类型:脉冲式,超高速WFD(波形数字化)增强技术,颜色及波长:1550 nm (不可见的) /658 nm (可见的),激光等级1级(符合IEC60825:2014标准)(7)扫描距离,范围:最小距离0.4 m最大范围270 m(34 %反射率),范围噪音*0.4 mm rms @ 10 m,0.5 mm rms @ 50 m(8)扫描速率:1000000点/秒(9)激光光斑大小:前窗激光光斑直径≤3.5mm(10)数据储存容量:256 GB内置固态硬盘(SSD)或外接USB设备(11)数据传输:千兆以太网,集成WLAN USB 2.0设备(12)机载界面显示:触摸屏(触笔)控制,真彩色VGA图形显示(640 x 480像素)(13)激光对中器:激光安全等级:1级(IEC 60825:2014)对中精度:1.5 mm @ 1.5 m 激光光斑直径:2.5 mm @ 1.5 m可打开/关闭(14)激光发散角:<0.23mrad(15)视场角:水平:360°(max)垂直:270°(max)照准:无视差,可变焦(16)仪器可同时使用两块内置锂电池和一块外挂锂电池,支持热交换2块内电池内置电池> 5.5小时(2块电池)外挂电池> 7.5小时(常温下)以便适应长时间野外作业;外接电源:24 V直流电或100 - 240 V交流电,典型40w功耗;。
三坐标雷达探测主要技术参数

三坐标雷达探测主要技术参数1.引言1.1 概述概述三坐标雷达是一种常用的测量工具,用于测量物体的形状、尺寸及位置等参数。
它通过向目标物体发送射频信号,并接收反射回来的信号来实现测量。
三坐标雷达具备高精度、高分辨率和非接触等特点,已广泛应用于制造业、航空航天、汽车工业等领域。
本文将详细介绍三坐标雷达的主要技术参数,包括其基本原理和工作方式、测量精度和分辨率以及应用前景和发展趋势等方面。
了解这些技术参数对于正确选用三坐标雷达、提高测量精度具有重要意义。
首先,我们将介绍三坐标雷达的基本原理和工作方式。
三坐标雷达利用电磁波的特性,通过发送和接收信号来实现测量。
其工作方式类似于常见的雷达系统,但针对不同的应用场景和测量对象进行了优化。
我们将详细解释三坐标雷达的工作原理和信号处理流程。
其次,我们将探讨三坐标雷达的测量精度和分辨率。
三坐标雷达可以实现非常高的测量精度,其精度通常以毫米甚至亚毫米级别来表示。
同时,分辨率也是评价三坐标雷达性能的重要指标,它决定了雷达能够分辨出不同目标之间的细微差别。
我们将介绍影响测量精度和分辨率的因素,并讨论如何提高雷达的性能。
最后,我们将展望三坐标雷达的应用前景和发展趋势。
随着制造业的发展和对质量控制的要求越来越高,三坐标雷达在产品检测、工艺优化等方面的应用前景非常广阔。
同时,随着雷达技术的不断发展和创新,三坐标雷达在测量精度、测量速度、适用范围等方面也将不断提升。
我们将对三坐标雷达在未来的发展方向进行展望,并探讨可能的技术突破和应用领域拓展。
通过阅读本文,读者将对三坐标雷达的主要技术参数有较为深入的了解,并能够对其应用前景和发展趋势有所把握。
希望本文能够为读者提供有价值的参考和指导,帮助他们更好地理解和应用三坐标雷达技术。
1.2文章结构1.2 文章结构本文主要介绍三坐标雷达探测的主要技术参数。
文章结构如下:1. 引言:对三坐标雷达探测技术进行概述,说明其重要性和应用领域。
2. 正文:2.1 三坐标雷达的基本原理和工作方式:介绍三坐标雷达的基本原理,包括其组成结构和工作原理。
室内外一体化移动扫描系统推车式扫描仪技术参数

1、室内外一体化移动扫描系统(推车式扫描仪)技术参数2、三维激光点云地形地籍成图软件参数▲(1)支持加载las、xyz、ply、pcd等格式点云,点云加载量超过200GB。
(2)可按包围盒、GPS时间等方式筛选点云。
(3)可根据高程、强度、时间、类别、强度、边缘增强等方式渲染点云,并支持保存渲染方案。
(4)支持算法自动分类点云地面点,支持手动分类点云。
▲(5)支持基于点云地面点实时构建并导出三角网模型,并使用BRUSH工具快速编辑优化三角网,支持按类别、高程、光照方向渲染三角网模型。
▲(6)可使用控制点验证DEM数据三角网精度,并输出精度报告。
▲(7)可基于DEM快速生成等高线,并支持贝塞尔曲线、张力样条曲线、三次B样条曲线等方式拟合等高线,生成的等高线直接是DWG或MDB等格式,无需转化。
(8)支持基于同名点精化点云,能够实时可视化消除点云分层,并能进行同名点误差统计。
▲(9)支持全景影像显示,并能实现点云和全景自动匹配;可使用双像量测功能量测像素空间坐标,并能在全景影像中量取坐标、边长和面积等参数。
(10)支持断面生产,可生成、编辑断面线,根据断面线快速显示点云剖面;可直接在剖面按照坡度或间距自动提取特征点,并能手动添加特征点。
▲(11)支持CASS、纬地等常见断面格式输出,支持不同断面格式一键转化;断面格式满足相对中桩距离+绝对高程、相对中桩距离+与中桩高差、里程+绝对高程、特征点坐标+相对中桩距离等格式。
▲(12)支持使用高程点或者DEM数据进行格网法土方计算;支持三角网法土方计算、断面法土方计算、方格网法土方计算、等高线法土方计算;可自动算出待整平场地的目标高程,使需平整场地的填方挖方相等。
▲(13)可将点云在GIS地图上叠加显示。
▲(14)具有骨架线符号化技术,具备完善的国标符号库,支持国标1:500、1:2000、1:5000、1:10000等比例尺符号模版。
(15)支持在点云、倾斜三维模型、正摄影像、DEM数据上成图;可双窗口联动、三窗口协同作业。
三维激光扫描移动测量在铁路运营中的应用

三维激光扫描移动测量在铁路运营中的应用随着科技的不断发展,三维激光扫描移动测量技术在铁路运营中的应用越来越广泛。
这种技术可以快速、精准地对铁路线路、车辆和设备进行测量和检测,为铁路运营提供了强大的技术支持。
本文将探讨三维激光扫描移动测量技术在铁路运营中的应用,介绍其原理和优势,并展望其未来发展前景。
一、三维激光扫描移动测量技术的原理和特点三维激光扫描移动测量技术是一种利用激光雷达和其他传感器,通过扫描周围环境来获取三维点云数据的测量方法。
它可以实现快速、精准的数据采集,无需接触被测物体,适用于复杂环境和大范围的测量任务。
在铁路运营中,这种技术可以应用于铁路线路的检测、铁路车辆的安全检测和设备的维护等方面。
1. 高精度:激光扫描可以实现毫米级的测量精度,可以满足铁路运营对测量数据的高精度要求。
2. 快速高效:采用激光扫描技术可以实现快速的数据采集和处理,大大提高了测量效率。
3. 非接触式测量:激光扫描可以实现对被测物体的远距离、非接触式的测量,避免了传统测量方法中可能存在的安全隐患和测量困难。
4. 适用性强:激光扫描技术可以适用于不同的铁路线路、车辆和设备,具有很强的通用性和适用性。
1. 铁路线路测量:三维激光扫描技术可以对铁路线路进行快速、精准的测量,包括铁轨的弯曲度、坡度和高低差等参数的检测。
可以及时发现线路的异常情况,提高铁路线路的安全性和稳定性。
2. 铁路车辆检测:利用激光扫描技术可以对铁路车辆进行尺寸、形状和结构的测量,包括车辆外观的损坏情况、车身的变形和轨间横向间隙等参数的检测。
可以有效发现车辆的安全隐患,提高车辆的安全性和可靠性。
3. 设备维护和管理:三维激光扫描技术还可以应用于铁路设备的维护和管理,包括轨道通信设备、信号设备和设备立柱等。
可以实现设备的快速、精准的测量和检测,及时发现设备的故障和缺陷,提高设备的可靠性和稳定性。
随着铁路运营对数据精度和效率要求的不断提高,三维激光扫描移动测量技术在铁路运营中的应用前景十分广阔。
HandySCAN 3D 移动式高精度 3D 扫描仪说明书

THE TRULY PORTABLE METROLOGY-GRADE3D SCANNERSThe HandySCAN 3D TM handheld scanners of new &UHDIRUP·V ÁThe easiest 3D scanning experience,generating fast and reliablemeasurements.The most accurate scanning and probing solutions, whether in a lab oron the shop floor.The truly portable metrology-grade 3D scanners delivering highly accuratemeasurements.CREAFORM 3D SCANNERSACCURACY. PORTABILITY. SIMPLICITY.THE HANDYSCAN 3D SCANNERS : YOUR BEST ALLY AT ALL STAGESOF YOUR PRODUCT LIFECYCLE MANAGEMENT–C–M–M–C–M– S–I ntegration of prototypePRGLÀFDWLRQV LQWR &$' À OH – Form study, proof-of-concept prototypes–ErgonomyprototypesTesting, simulation and analysis–3D scan-to-CAD–R everse engineering (extracting design-intent) –P ackaging design–R apid prototyping/Manufacturing – ,QWHJUDWLRQ RI SURWRW\SH PRGLÀ FDWLRQV LQWR &$' À OH –P rototype inspection– F inite element analysis (FEA) –I nterference analysis – D eformation, geometry analysis Tooling design Assembly/Production Quality control– R À [WXUHV MLJV DQG SDWWHUQV – 8SGDWH RI &$' À OH WR UHÁ HFW DV EXLOW tooling measurements–T ooling validation/Inspection–V irtual assembly – T ool/Robot path programming – P art assessment before machining – F irst article inspection (FAI)–P art-to-CAD inspection – S upplier quality inspectionDocumentationMaintenance, repair andoverhaul (MRO)Replacement/Recycling– A s-built documentation of parts/Tooling – M systems, serious gaming –D igital archiving– W ear and tear analysis – &XVWRP UHSDLUV 0RGLÀ FDWLRQ – A s-built documentation of parts/Tooling before maintenance – R everse engineering for developing replacement/Restoration parts – P lanning of complex assemblies disassembly/DismantlingOTHER APPLICATIONSC R E A F O R M 3D S C A N N I N GALL OF THE CREAFORM PORTABLE 3D SCANNERS FEATURE INNOVATIVE AND EXCLUSIVE TECHNOLOGIES:TRUaccuracy TMACCURATE MEASUREMENTS IN REAL LIFE OPERATING CONDITIONSTRUportability TM 3D SCANNING WHERE YOU NEED TO GO TRUsimplicity TMOVERLY SIMPLE 3D SCANNING PROCESSAUTOMATIC MESH OUTPUT: READY-TO-USE FILES, RIGHT AS YOUCOMPLETE ACQUISITION.QUICK WORKFLOW INTEGRATION: USABLE SCAN FILES TO BEIMPORTED INTO RE/CAD SOFTWARE WITHOUT POST-PROCESSING.REAL-TIME VISUALIZATION: LOOK AT THE COMPUTER SCREENTO SEE WHAT YOU ARE DOING AND WHAT IS LEFT TO BE DONE.ON-THE-GO SCANNING: TAKE IT FROM PLACE TO PLACE ORUSE IT IN-HOUSE OR ON SITE.LIGHTWEIGHT AND SMALL: WEIGHTS 0.85 kg (1.9 lb.), CANREACH CONFINED AREAS. FITS INTO A CARRY-ON.QUICK SET-UP: UP AND RUNNING IN LESS THAN 2 MINUTES.NO RIGID SETUP REQUIRED: THE PARTAND SCANNER CAN BE MOVED FREELY DURING SCANNING.SELF-POSITIONING: ITUSES TRIANGULATION ON OPTICAL REFLECTORS TO DETERMINE ITS RELATIVE POSITION TO THE PART.STAND-ALONE DEVICE: NO EXTERNAL POSITIONING SYSTEM, NOARMS, NO TRIPOD OR FIXTURE.FASTEST 3D SCANNER ON THE MARKET: 25 TIMES FASTER THANTHE PREVIOUS GENERATION.HIGHEST MEASUREMENT RATE AMONG ALL LASER SCANNERS:480,000 MEASURES/SVERSATILE: VIRTUALLYLIMITLESS 3D SCANNING – NO MATTER THE PART SIZE, COMPLEXITY, MATERIAL OR COLOR.USER-FRIENDLY: VERYSHORT LEARNING CURVE, REGARDLESS OF THE USER’S EXPERIENCE LEVEL.METROLOGY-GRADE MEASUREMENTS:ACCURACY OF UP TO 0.030 mm (0.0012 in.), RESOLUTION OF UP TO 0.050 mm (0.002 in.), HIGH REPEATABILITY AND TRACEABLE CERTIFICATE.–U ser-friendly interface: VXelementswas designed to simplify the wholescanning process to its essential core,through a powerful and simple process;–S urface optimization algorithm: avoidsthe creation of multiple scan layers andensures a more accurate mesh withoutany post-treatment;–D irect mesh output: an optimized meshcan be exported in all standard formats,right as you complete acquisition. Nocomplicated alignment or point cloudprocessing needed;–N o limitation to the scan resolution:you simply need to input a resolutionvalue, independent from the size ofWKH VFDQQHG REMHFW 5HVROXWLRQ FDQ EHchanged at any time before/after thescan;–R eal-time visualization: the user canYLHZ WKH ' VXUIDFH DV WKH REMHFW LV EHLQJscanned;–S can results enhancement: KROH À OOLQJVPDUW GHFLPDWLRQ ERXQGDU\ À OWHUV HWF VXELEMENTS TM : CREAFORM’S3D SOFTWARE PLATFORMHHW RI 'HOHPHQWV DQG WRROV LQWR D XVHU IULHQGO\ VLPSOLÀ HG DQG VOHHN ZRUNLQJ environment. Its real-time visualization provides a simple, enjoyable scanning experience.$Q RSWLPL]HG VFDQ À OH LV DXWRPDWLFDOO\ FUHDWHG DQG DYDLODEOH XSRQ completion of the data acquisition step, which contributes to greatly shorten your part inspection or design process.EXTEND THE POWER OF YOUR HANDYSCAN 3D SCANNERACCESSORIESCREAFORMCUSTOMER SERVICEWhen you purchase a Creaform 3Dmeasurement solution, you can rely on the CreaCare TM customer service program. We find it important to help you simplify your work, increase your efficiency and make the most out of your Creaform device.You want to make sure to start things right? For a small fee, you can ask that a qualified expert comes over to your business place to help you get started with your system, and to train your staff on your specific applications.Of course, we offer you readily available, multilingual technical support on all continents, ensured by knowledgeable, proactive and committed product specialists.To protect your investment further and keep you on the technological edge, you can also subscribe to a CreaCare Maintenance Plan, offered in various protection packages. Depending on the package selected, you could get instant downloading access to each new release of our proprietary data acquisition software or get a free loaner unit while your device gets serviced, for instance.CREAFORMMETROLOGY AND 3D ENGINEERING SERVICESConvinced of the quality and possibilities of the Creaform technologies, but not quite yet ready to commit and buy? Know thatCreaform offers a wide range of metrology and 3D engineering services. Our experts have earned a worldwide reputation foreffectiveness and professionalism. Whether you need their help to perform 3D scanning, quality control, reverse engineering, FEA/CFD simulations, product and tooldevelopment or training services, you can count on their commitment to meet your requirements with responsiveness and adaptability.Authorized DistributorHandySCAN 3D, HandySCAN 300, HandySCAN 700, Go!SCAN 3D, MetraSCAN 3D, TRUaccuracy, TRUportability, TRUsimplicity , VXelements, MaxSHOT 3D, VXmodel, VXremote, CreaCare and their respective logo are trademarks of Creaform Inc. © Creaform inc. 2015. All rights reserved. V2TECHNICAL SPECIFICATIONSHandySCAN 300TMHandySCAN 700TMWEIGHT 0.85 kg (1.9 lb.)DIMENSIONS77 x 122 x 294 mm (3.0 x 4.8 x 11.6 in.)MEASUREMENT RATE205,000 measurements/s480,000 measurements/sSCANNING AREA 225 x 250 mm (8.8 x 9.8 in.)275 x 250 mm (10.8 x 9.8 in.)LIGHT SOURCE 3 laser crosses7 laser crosses (+1 extra line)LASER CLASS 2M (eye-safe)RESOLUTION 0.100 mm (0.0039 in.)0.050 mm (0.0020 in.)ACCURACYUp to 0.040 mm (0.0016 in.)Up to 0.030 mm (0.0012 in.)VOLUMETRIC ACCURACY*0.020 mm + 0.100 mm/m (0.0008 in. + 0.0012 in./ft)0.020 mm + 0.060 mm/m (0.0008 in. + 0.0007 in./ft)VOLUMETRIC ACCURACY (WITH MAXSHOT 3D)*0.020 mm + 0.025 mm/m (0.0008 in. + 0.0003 in./ft)STAND-OFF DISTANCE300 mm (11.8 in.)DEPTH OF FIELD250 mm (9.8 in.)PART SIZE RANGE (RECOMMENDED)0.1 – 4 m (0.3 – 13 ft)SOFTWAREVXelementsOUTPUT FORMATS .dae, .fbx, .ma, .obj, .ply, .stl, .txt, .wrl, .x3d, .x3dz, .zprCOMPATIBLE SOFTWARE 3D Systems (Geomagic® Solutions), InnovMetric Software (PolyWorks), Dassault Systèmes (CATIA V5 and SolidWorks), PTC (Pro/ENGINEER), Siemens (NX andSolid Edge), Autodesk (Inventor, Alias, 3ds Max, Maya, Softimage).CONNECTION STANDARD1 X USB 3.0OPERATING TEMPERATURE RANGE5-40 °C (41-104 °F)OPERATING HUMIDITY RANGE (NON-CONDENSING)10-90%%DVHG RQ WKH ,62 VWDQGDUG YROXPHWULF DFFXUDF\ LV GHÀQHG DV D VL]H GHSHQGHQW YDOXH&UHDIRUP LQF +HDG 2IÀFH5825 rue St. GeorgesLévis, Québec G6V 4L2 Canada Tel.: 1.418.833.4446Fax: 1.418.833.9588*******************|Creaform U.S.A. Inc.1590 Corporate DriveCosta Mesa CA 92626 USATel.: 1.855.939.4446 | Fax: 1.418.833.9588。
三维扫描仪型号分类

三维扫描仪通过扫描收集到的这些三维数据具有相当广泛的用途,工业设计、瑕疵检测、逆向工程、机器人导引、地貌测量、医学信息、生物信息、刑事鉴定、数字文物典藏、电影制片、游戏创作素材等等都可见其应用。
不同使用场景的三维扫描设备,差异是很大的。
下面给大家介绍一下三维扫描仪的分类和一些常见的型号。
以下是一些常见型号的三维扫描仪产品。
一、地面三维激光扫描仪地面三维扫描仪适用于几米到几百上千米的空间范围,精度一般是毫米级,在建筑、数字化工厂、公共安全等行业较为适用。
目前比较有名的地面三维扫描设备有Faro 法如,Trimble天宝,徕卡等,不同品牌各有千秋,我这边大致阐述一下。
法如FARO 手持三维扫描仪,是美国Faro公司的产品,品牌知名度高,产品优点在于设备很小很轻,大小仅有24厘米x 20厘米x 10厘米,重量仅有4.2公斤。
非常便于在复杂的环境下移动和安置。
而且其内置彩色相机可提供高达1亿6千5百万像素的无视差彩色叠加。
最终结果可得到精细照片级三维彩色影像。
还有一个优点是在阳光直射下,可高速远距离扫秒,例如Faro Focus S350,扫描距离一站可以达到350米,而且利用其所集成的GPS接收器,能够使每一次扫描与后处理相关联。
Faro这系列地面三维激光扫描仪降低了外业工作的强度,同时该设备的价格较有竞争力。
美国天宝Trimble地面三维扫描仪,较之于Faro来说略大,也是厘米级的精度,主机尺寸为335 mm宽x 386 mm 高x 242 mm 深,重量为10.7公斤(含三角基座不含电池)。
凭借天宝专利的Lightning闪电技术,在其整个测程范围内,TX8都可以每秒1百万个精确激光点的速度获取数据。
天宝的Lightning技术很少受到表面类型和大气条件变化的影响,所以可从每个测站中获得完整性的数据集。
二、低精度手持三维扫描仪这种三维扫描仪比较新兴,市场上同类型的产品很少。
比较出名的是MV F6手持式3D扫描仪,这款扫描仪使用红外光,专门用于扫描几十厘米到几米的大型物体和大面积空间,能迅速扫描复杂场景。
车载移动测量实景三维数据规范
ICS点击此处添加ICS号点击此处添加中国标准文献分类号DB江西省地方标准DB / XXXXX—XXXX车载移动测量实景三维数据规范Rules for inspection and acceptance of ground mobile mapping system点击此处添加与国际标准一致性程度的标识(征求意见稿)XXXX-XX-XX发布XXXX-XX-XX目录1 范围 (1)2 规范性引用文件 (1)3 术语与定义 (1)4 总则 (3)4.1 数学基础 (3)4.2 数据内容 (4)4.2.1 可量测实景影像 (4)4.2.1.1 实景影像 (4)4.2.1.2 内外方位元素 (4)4.2.1.3 时间参数 (4)4.2.1.4 应用接口 (4)4.2.2 连续360度全景影像 (4)4.2.2.1 全景影像 (4)4.2.2.2 全景拼接参数 (4)4.2.2.3 外方位元素 (4)4.2.3 激光点云 (4)4.2.4 可定位视频 (4)4.2.4.1 视频数据 (4)4.2.4.2 定位数据 (4)4.2.4.2 时间参数 (5)4.3 数据规格 (5)4.3.1 可量测实景影像数据 (5)4.3.2 连续360度全景影像数据 (5)4.3.3 激光点云 (5)4.3.4 可定位视频 (5)5 数据采集与处理 (5)5.1 数据处理内容 (5)5.1.1 定位定姿数据处理 (5)5.1.1.1 GNSS数据 (5)5.1.1.2 IMU数据 (5)5.1.1.3里程数据 (5)5.1.2 影像地理参考 (5)5.1.3 影像测图及属性数据处理 (6)5.1.4 影像数据处理 (6)5.1.5 数据融合 (6)5.1.6 影像切片和属性数据库创建 (6)5.1.7 激光点云数据 (6)5.1.8可定位视频数据 (6)5.2 数据处理要求 (6)5.2.1 地理参考处理 (6)5.2.2 GNSS定位数据的处理: (7)5.2.3 定位定姿数据处理要求: (7)5.2.4 数据压缩 (7)5.2.5 影像处理 (7)5.2.6 保密处理 (7)5.2.7 位置姿态精度 (7)5.2.8 属性数据 (7)5.2.9 激光点云数据处理 (8)5.2.10 车载可定位视频数据处理 (8)6 数据与数据集 (8)6.1数据内容 (8)6.1.1 车载平台三维位置数据 (8)6.1.2 时间参数数据 (8)6.1.3 定位定姿结果数据 (8)6.1.4 彩色点云数据 (8)6.1.5 影像数据 (8)6.1.6 车载视频数据 (8)6.2 数据组织结构 (9)6.3 数据输出格式 (9)6.3.1 可量测实景影像数据格式 (9)6.3.2 360度全景影像数据格式 (9)6.3.3 车载激光扫描数据格式激光数据 (9)6.3.4 车载移动视频数据格式视频数据 (9)6.4 数据集 (9)6.5 数据精度 (9)6.5.1 可量测实景影像数据精度 (9)6.5.2 360度全景影像数据精度 (10)6.5.3 车载激光扫描数据精度 (10)6.5.4车载可定位视频数据精度 (10)6.6 元数据 (10)7 数据包装与标识 (12)7.1 数据产品包装 (12)7.2 数据产品标示与示例 (12)7.2.1 可量测实景影像数据集的标示及示例 (12)7.2.2 360度全景影像数据集的标示及示例 (13)7.2.3 车载移动视频数据集的标示及示例 (13)7.2.4 车载激光扫描数据集的标示及示例 (14)附录1实景影像目录格式 (15)前言本标准的起草规则依据GB/T 1.1-2009。
车身三维扫描成像系统技术参数

1.设备名称:车身三维扫描成像系统
2.设备清单及技术参数要求
设备名称
数量
主要技术参数及要求
使用范围
汽车车身扫描系统硬件
1台套
Байду номын сангаас参数:
(1)结构形式:采用无需机械辅助的自定位的CCD和激光束相结合的手持式扫描结构。
(2)激光等级:II级或以上
(3)扫描速度:≥480,000 次测量/秒;
(3)车身内部骨架及结构的测量
(4)汽车其他零部件的测量
配套软件
1套
配套扫描软件要求:
(1)可实现扫描系统的自定位;
(2)实时扫描时能实现实时动态拼接显示;
(3)扫描数据可以以点云模式及三角网格面数据两种模式直接显示;
(4)点云分辨率可以在扫描前设置,也可以在扫描后设置,确保获得合理密度的点云数据;
(5)数据文件以STL,Igs,等格式输出,兼容Catia V5、UGS、PRO-E、Imageware、Rapidform,3dmax,maya等软件,具备扫描表面、点云、目标点等多种扫描模式;
(6)可以单独获取和保存工件上定位目标点位置坐标,以便实现装配扫描和组合扫描功能。
(4)扫描景深不小于25cm;
(5)扫描精度:不低于0.03mmISO:0.02+0.06mm/m;
要求:
(1)支持动态扫描;
(2)支持组合装配或拆解扫描;
(3)能实现工件的正反面及内外扫描;
(4)正反面扫描时能实现自动的数据拼接,无需通过后期软件进行拼接。
(1)车身外表面的测量
(2)车身可拆卸零部件的测量
三维激光扫描仪

三维激光扫描仪三维激光扫描仪参数1防尘/防水等级:≥IP54。
2扫描技术规格:扫描最远距离≥130m。
激光类别:I级安全激光。
*3激光发射频率:≥1500,000点/秒。
*4测量精度:距离精度:基础误差≤1.5mm,每增加1km误差增加≤10mm;角度精度:≤18″/18″(垂直/水平);噪音精度:≤0.5mm;点位精度:在10m距离扫描单点精度≤1.9mm。
5扫描视角:水平方向:360°;垂直方向:≥290°。
6相机系统:单个镜头像素≥1200万像素,能够生成全景影像,全景影像最高像素≥4.32亿像素。
任何光线条件下的HDR图像获取都可在2分钟之内完成。
7数据采集速度:一测站360°扫描和HDR全景照片的获取时间<2分钟。
*8实时拼接:可实现扫描仪实时全自动点云拼接。
9双倍扫描:可开关,实现自动去除视场内移动物体10视觉惯性系统:实时跟踪计算扫描测站相对于前一测站的实时相对位置。
11倾斜传感器:基于惯性导航系统,倾斜补偿精度≤3分12附加传感器:内置测高仪、指南针、卫星定位系统13移动设备操作:可远程控制扫描,2D和3D的数据查看、标注,扫描测站可自动配准。
14数据存储:工业级可插拔3.0闪存,单个闪存≥256G15电池:原装电池2块,支持热插拔,使用两块电池工作时间≥4小时。
备用电池2块。
16配套一台笔记本电脑和一个平板笔记本电脑参数:屏幕尺寸>15英寸、屏幕分辨率≥3840*2160、CPU≥Xeon E-2186M、显卡显存≥16GB、内存≥16GB硬盘:≥1T,预装正版Windows10专业版,三年全球联保(自出厂之日起);平板参数:系统:ios系统、硬盘:≥512G、尺寸:10.1英寸~12英寸二、配套三维点云后处理软件*17、三维后处理软件必须为一体的,不需要在另加第三方软件,且必须至少包含以下模块:A、点云处理模块,要求可同时处理点云数据≥10亿,软件调用数据流畅。
常用三维移动扫描车型号及参数3(精)
常用三维移动扫描车型号及参数2
三维移动扫描车型号3:Landmark移动测绘系统---美国Trimble
Landmark系统介绍:
Landmark移动测绘系统是美国天宝(Trimble)公司研制的一套完全基于陆路交通工具(汽车/火车)进行移动测绘的系统,能为各个行业信息化过程中的基础数据建设提供快速的、准确的高精度数据采集和三维建模解决方案。
Applanix Landmarks 系统(LMS)可以为数据生产公司和最终用户提高生产效率,是业内第一款移动制图和三维建模解决方案。
Landmark系统特点和优势:
1、可以快速移动制图,并可以得到三维地形数据,可以克服GPS信号失锁。
2、相对于GPS和全站仪等测量方式,Landmark可以实现小范围内的三维地形数据快速生成,对于机场、石油管线、市政管理等测绘数据生产具有较大的意义,可以大大缩短项目数据采集时间、节省大量的人工费用,减少工程的复杂度。
3、相对于航空摄影测量方式,机动灵活,成本低,更新数据快,周期短。
4、系统平台可以搭载多种遥感数据获取系统。
5、获取数据快速精准,并且信息量非常大。
Landmark系统技术参数:
1. 定位定姿系统(POS LV)
2. 数码相机
3.激光扫描仪-SICK。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
常用三维移动扫描车型号及参数
三维移动扫描车型号1:拓普康IP-S2移动测量系统
仪器介绍:
拓普康IP-S2移动测量系统成功解决了多维空间信息采集的瓶颈,采用卫星定位、惯导测量等融合定位方式,利用集成的360°相机和多重激光扫描设备,可以快速地提供精确的多元数据流,并且可在线进行数据更新,节省了大量的人力物力。
目前,在全球已有近千套IP-S2移动测量系统成功服务于城市景观漫游(如三维数字街景数据采集)、道路及管线设施普查、公众安全等领域。
产品特点:
● 精确记录具有空间参照信息和时标信息的RGB点云及视频影像
● 高精度GPS+GLONASS信号跟踪
● 惯性测量单元辅助导航定位
● 获取道路及周边地物的3D特征
● 获取道路沿线360°全景影像
● 快速、简易的安装和拆卸
特性说明:
可同时获取具有空间和时标信息的RGB点云及360°影像双频GPS+GLONASS 定位IP-S2主控单元使用多传感器实时获取精确的车辆位置和姿态。
由于双频GNSS接收机能同时跟踪GPS和GLONASS信号,从而使IP-S2应用范围更广,尤其在有遮挡的城市区域。
内置IMU连续不间断的监控车辆的运动和姿态,即使行驶在有障碍物、隧道等没有GNSS信号的情况下,IP-S2系统也能跟踪定位车辆的位置。
车轮编码器
车轮编码器提高了定位精度和可靠性。
安装在后轮的车轴上,编码器可以检测每个轮子的转动。
车辆姿态是通过比较两轮之间的转动速度而精确计算得到。
激光扫描仪(可选)
三个2D激光扫描仪能够获取道路路面及两侧的高分辨率3D点云,并且不受光线条件的影响。
IP-S2系统利用高精度的点云数据和GPS时间能够定期进行道路形状、位置和属性等的检测。
360°全景相机(可选)
360°全景相机连续捕获球面影像。
影像与点云的完美结合大大提高了三维分析功能。
高度集成的安装支架,易于快速安装和拆卸IP-S2的安装支架将所有的传感器集成到一块,易于快速、简易安装和拆卸。
运输箱能够装入整个安装支架,为IP-S2系统提供了保护和安全运输。
一台笔记本即可完成任意工作,高集成度系统的配置仅需要车里放置一台笔记本。
从数据采集到处理再到分析都可以使用同一台笔记本完成。
技术指标:
配套软件:
IP-S2 Dashboard——数据采集软件
IP-S2 Dashboard是通过PC端的FireFox Web浏览器来操作的,具备友好的操作界面。
此软件通过网络使用户控制IP-S2主机和配置连接多种传感器。
它也能控制数据采集、存储和显示。
坐标系统转换
专业的坐标系统转换软件能够将WGS84坐标的点云数据转换成本地坐标系统,这将更适用于GIS或CAD平台的应用。
三维移动扫描车型号2:移动道路测量系统(MMS)---武汉立得
仪器介绍:
MMS代表着当今世界最尖端的测绘科技,它是在机动车上装配GPS、CCD、INS/DR等先进的传感器和设备,在车辆高速行进之中,快速采集道路及两旁地物的空间位置数据和属性数据,并同步存储在车载计算机中,经专门软件编辑处理,形成各种有用的专题数据成果,能满足市政城管、交通、公安/应急、铁路、公众位置服务等多领域用户对于实景三维地理信息快速采集与更新的需求。
系统在定姿定位子系统的辅助下,快速采集地貌、地物的点云与影像数据,实时计算出被测物的精确地理坐标,生成空间点云数据信息库,在点云数据库的支持下,与高分辨率实景影像数据进行精确匹配,生成精细、精准的三维地理空间模型,可输出成果:激光点云、高清街景、三维模型、矢量图。
技术指标:
三维移动扫描车型号3:Landmark移动测绘系统---美国Trimble
Landmark系统介绍:
Landmark移动测绘系统是美国天宝(Trimble)公司研制的一套完全基于陆路交通工具(汽车/火车)进行移动测绘的系统,能为各个行业信息化过程中的基础数据建设提供快速的、准确的高精度数据采集和三维建模解决方案。
Applanix Landmarks 系统(LMS)可以为数据生产公司和最终用户提高生产效率,是业内第一款移动制图和三维建模解决方案。
Landmark系统特点和优势:
1、可以快速移动制图,并可以得到三维地形数据,可以克服GPS信号失锁。
2、相对于GPS和全站仪等测量方式,Landmark可以实现小范围内的三维地形数据快速生成,对于机场、石油管线、市政管理等测绘数据生产具有较大的意义,可以大大缩短项目数据采集时间、节省大量的人工费用,减少工程的复杂度。
3、相对于航空摄影测量方式,机动灵活,成本低,更新数据快,周期短。
4、系统平台可以搭载多种遥感数据获取系统。
5、获取数据快速精准,并且信息量非常大。
Landmark系统技术参数:
1. 定位定姿系统(POS LV)
2. 数码相机
3.激光扫描仪-SICK
三维移动扫描车型号4:iMMS移动实景测图系统
IMMS系统介绍:
iMMS移动实景测图系统核心技术:
CV(Camera Vector,相机矢量技术),类人眼的视觉识别、定姿定位技术;
脱颖而出的定位定姿技术,基于相机在移动过程中采集的特征点完成定位定姿,不依赖GPS/IMU/陀螺等定位定姿传感器;
自动解算相机的6个外方位元素,即三维位置坐标(X, Y, Z) 和三维姿态角(θX,θY,θZ=Y,P,R) ;
高精度的三维定位和识别技术,采集得到360度球幕影像视频,影像视频帧
与帧之间间距小于1m;
持续自动跟踪不低于500个特征点,自动计算相机的位置和姿态,排除相机震动噪声干扰,根据GPS/IMU校准相机绝对位置(可选)根据地面控制点/地图校准相机绝对位置 (无GPS情况下)
iMMS移动测图系统主要优势:
硬件配置简便:主要为1个或2个全景相机,并辅以倾斜传感器或加速度计IMS2---相机系统、IMS3---双相机系统
平台灵活:可以是车辆、摩托、电瓶车、船、飞机、人背式…
安装校正十分简单:不同于基于POS、车轮传感器、激光扫描、相机的繁杂系统。
准自动三维建模,可视化量测与识别(一切工作在实景正射影像上展开)可引入计算机图形(便于现况模拟和规划)可引入各种控制点来进行比例尺调整和坐标转换(不仅仅是GPS)
二、三维GIS交互(可提供SDK)视觉定位(因为基于特征点)
应用广泛(GIS数据库更新、资产管理、模拟与规划、虚拟旅游、道路养护、三维导航…)GIS数据库创建/更新
资产管理、仿真演练、测量分析、虚拟旅游、旅游景区/场馆演示、实景导航、道路表面及附属设施盘查和养护、城市规划中的情景模拟、准自动化城市三维建模
iMMS移动测图系统应用领域:
行进速度:
40 – 50 km / h
30 km / h
16 FPS / s
3-5 GB / Km
1 PPS
车辆之间保持:距离5- 10 meter
10m处:绝对精度15 cm RMS,相对精度1-5 cm RMS 50m处:绝对精度20 cm RMS,相对精度15 cm RMS iMMS城市(每km) IMS3 –(3000 – 4000 帧)– 2 小时max
CV影像
+去除死角
km)
IMS3 – ( <3000帧) – 1小时max
CV影像(45分钟)
+去除死角
iMMS移动测图系统数据后处理速度。