PDAS9.5安装说明
智能PDA使用说明书(含POS)
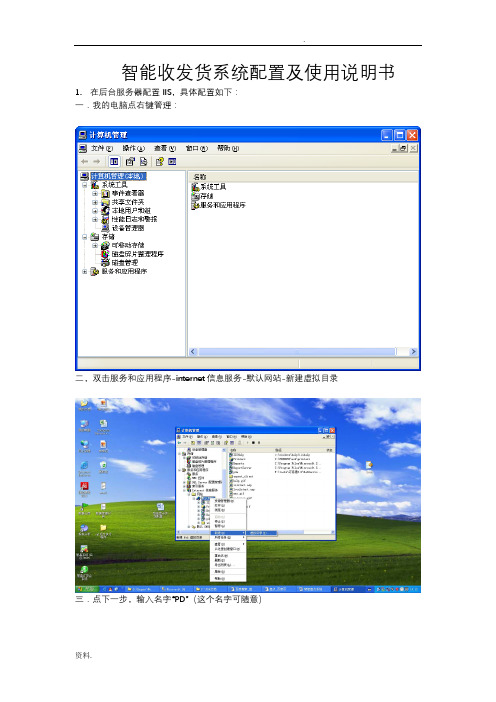
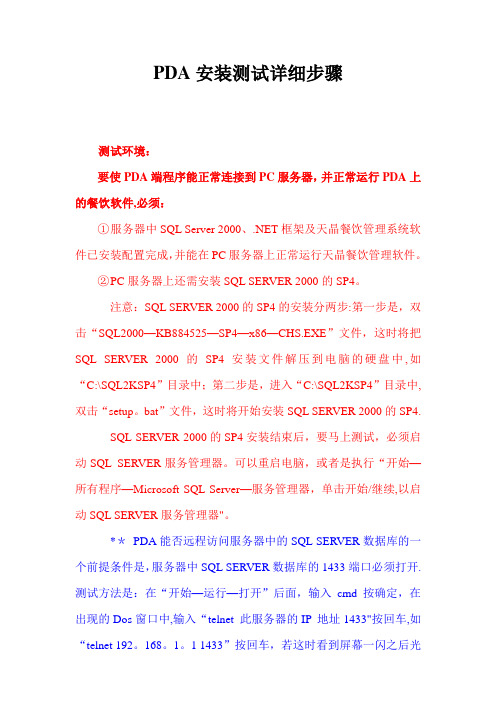
智能收发货系统配置及使用说明书1.在后台服务器配置IIS,具体配置如下:一.我的电脑点右键管理:二,双击服务和应用程序-internet信息服务-默认网站-新建虚拟目录三.点下一步,输入名字“PD”(这个名字可随意)四.点下一步,选择服务端Pdaservice的路径,按确定再按下一步。
五.然后再完成备注:建立完成后点PD右键属性,在虚拟目录选项里面,应用程序名,在右边点创建,执行权限选纯脚本,然后点,ASP版本选2.0六.然后去到服务端Pdaservice的文件下面,打开EncryptConfigText 输入服务器名(本机可为.)、数据库的用户密码、数据库名。
然后点保存,如图所示七.安装activesync4.5,只有安装该软件后电脑和PDA才能传输文件。
(只需一直点下一步直到完成)二.各个模块应用说明开机自动进入系统显示登陆画面,如图参数设置,可切换仓库和店铺系统。
如图:单据,如图订货会选项,如图下载控制,如图数据中心,如图:数据清除,如图系统主菜单,如图:1.仓库盘点一..选择仓库盘点.可以输入手工单号,选择一个仓库;如果是店铺盘点,选择店铺盘点,界面都是一样的。
如图二.选择表体[F2],输入仓位,就可以进行扫描了.三。
.扫描完成如图四.如果要修改数量,先在数量框输入正确的数量,然后再点修改.比如把货号002YM1219改为10,先在数量输入10五.点修改,如图六.点”是”就可以了.七.全部扫描完成后,点功能-确认,数据生成一个还原点即确认数。
八.然后我们继续向下盘点,可以再建一个仓位02,继续扫描九.扫描完之后如果发现数量不对或不想要这个仓位的数据可以点撤消,就回到原来的还原点,扫描完成后直接点保存,就生成盘点单。
2.厂家来货一.打开厂家来货模块,选择厂家来货,可以引用采购单或厂家到货通知单。
如图二.先获取单号,点查询,系统会把所有单据列出来,双击你要下载的单据,前面变Y,按下载.,下载完成点返回。
PDA安装测试详细步骤
PDA安装测试详细步骤测试环境:要使PDA端程序能正常连接到PC服务器,并正常运行PDA上的餐饮软件,必须:①服务器中SQL Server 2000、.NET框架及天晶餐饮管理系统软件已安装配置完成,并能在PC服务器上正常运行天晶餐饮管理软件。
②PC服务器上还需安装SQL SERVER 2000的SP4。
注意:SQL SERVER 2000的SP4的安装分两步:第一步是,双击“SQL2000—KB884525—SP4—x86—CHS.EXE”文件,这时将把SQL SERVER 2000的SP4安装文件解压到电脑的硬盘中,如“C:\SQL2KSP4”目录中;第二步是,进入“C:\SQL2KSP4”目录中,双击“setup。
bat”文件,这时将开始安装SQL SERVER 2000的SP4.SQL SERVER 2000的SP4安装结束后,要马上测试,必须启动SQL SERVER服务管理器。
可以重启电脑,或者是执行“开始—所有程序—Microsoft SQL Server—服务管理器,单击开始/继续,以启动SQL SERVER服务管理器"。
**PDA能否远程访问服务器中的SQL SERVER数据库的一个前提条件是,服务器中SQL SERVER数据库的1433端口必须打开.测试方法是:在“开始—运行—打开”后面,输入cmd按确定,在出现的Dos窗口中,输入“telnet 此服务器的IP 地址1433"按回车,如“telnet 192。
168。
1。
1 1433”按回车,若这时看到屏幕一闪之后光标在左上角不停闪动,说明正常;若出现“不能打开到主机的连接,在端口1433:连接失败”,说明服务器中SQL Server 2000端口不正常,可能是SQL SERVER 2000的SP4安装不正确等原因造成的。
一、假设PDA还未连接到无线AP,但已用数据连接线将PDA 与主服务器连接起来,并已通过Microsoft ActiveSync进行了连接。
PDA与数据采集器连接、设置使用说明书
PDA连接数据采集说明书1.在计算机上安装PC-PDA同步软件(方便直接在电脑上为PDA安装与数据采集器通讯软件及下载数据)。
2.打开安装完毕的PC-PDA同步软件Microsoft ActiveSync如(图1)(图1)3.开启PDA。
使用标配的PC与PDA连接线(如图2)连接电脑与PDA(如图3)(图2)标配线(图3)那么PC-PDA同步软件Microsoft ActiveSync就会自动连接到PDA(如图4、5、6)。
中途出现(图4)时选择取消;出现(图5)时选择确定;(图6)为电脑与PDA已经连接成功。
(图4)(图5)(图6)4.在安装PDA与数据采集器通讯的软件PconnectCE。
双击PconnectCE里边的SETUP.EXE 如:(图7)(图7)点击Next(图8)(图8)选择‘是’如:(如图9、10)开始安装软件到PDA(图9)(图10)点击确认(图11)(图11)(图12)为把PconnectCE已经安装到PDA中。
(图12)5.使用标配的PDA-232线如(图13)和空猫线(图14)连接到数据采集器(图13)(图14)(图15)为线路连接后的图。
这样PDA就可以与数据采集器进行通讯了。
(图15)6.PDA操作:1)安装CF卡到PDA 如(图16),完全插入为止。
(图16)2)PDA与数据采集器通讯的设置:用触摸笔点击PDA屏幕左上角的WINDOWS图标如:(图17)(图17)选择Programs,找到PconnectCE图标并-单击PconnectCE图标进入PconnectCE主程序界面,用触摸笔点击屏幕左下角的New,跳出对话框-选择需要连接的数据采集器型号并按压左下角的“OK”键。
弹出选择界面:选择通讯端口(默认的为COM1)、站点名称自己起名或是默认、数据采集器型号默认、PakBus Address默认、密钥默认,点击右上角的“OK”按钮完成设置。
3)PDA与数据采集器通讯的连接与收集数据:用触摸笔点击屏幕下方的CONNECT按钮,进行PDA与数据采集器的通讯。
PDA采集软件升级安装说明
PDA采集软件升级安装说明
2014年1月1日,国家统计局对PDA采集软件进行了升级和用户注销工作,所有的PDA必须重新注册,具体操作方法如下:
1、使用自己的名字用14位码注册到普查区,登录到移动终端管理平台,会收到制度包、底册包和地图包,另外还会收到两个升级安装包,收到升级包后进行下载。
2、移动终端管理平台可以直接升级安装,PDA采集软件必须先卸载后再安装,否会同步失败。
卸载方法:在应用管理里找到PDA数据采集,点卸载。
安装方法:安装文件放在PDA的thtf3目录下的APP目录下,点击PDA数据采集软件LV5.026.apk。
3、安装完成后登录PDA采集软件,进行数据同步。
同步完成后可以采集普查数据。
4、关于清华同方的PDA的数据采集更新,必须用360助手等第三方软件卸载预装的PDA采集5.015版后,再安装PDA数据采集5.026版,如果直接覆盖安装会提示同步失败。
软件新增功能:一个PDA可以采集多个普查区数据,不需要进行数据清除工作,具体操作方法是在终端管理平台的系统管理里有个新增普查区,把此PDA需要普查的普查区代码增加进来,然后登录到PDA数据采集软件进行数据
同步,此时同步只要选择地图数据同步即可,进入数据采集时会显示本PDA的所有任务,可以进行各个普查区的数据采集工作。
PADS 9.5安装使用指南
图 2.4 选择 Modify(更改),进入图 2.5。
图 2.5
选择所需要安装的产品,看个人喜好吧!呵呵,看不懂就全选。然后单击改变路径如图 2.6。
图 2.6 选择需要的安装目录,注意安装路径不能有空格和中文,估计会出错的。单击项目路径进入 图 2.7。
图 2.7
9
首先修改绿色框中的项目路径。然后将蓝色框前钩钩去掉设置下工作空间的路径,好和绿色框 路径相同。后点击 Done,回到安装选项界面如图 2.8。
1.1 如何从官方获取 Pads30 天试用软件? ..................................................................... 1 1.2 安装前的准备工作 ....................................................................................................... 4 第二部分 安装 ............................................................................................................................... 5 2.1 Pads 的安装 ........................................................................................................................ 5 2.2 如何激活软件? .............................................................................................................. 10 2.3 如何解决 Windows8 中 Pads logic 选项功能不能使用的问题? ............................... 13 祝语 .......................................................................................................................................... 15
【VIP专享】手持仪软件安装及系统配置步骤说明
安全信息系统手持仪PDA软件安装及系统配置步骤说明目录上位机环境配置(Windows XP) (1)上位机环境配置(Windows7 32/64位) (4)下载“PDA软件配置程序” (6)PDA网络配置 (9)下载PDA“安全信息系统” (11)PDA输入法设置 (14)PDA显示屏背光设置 (16)PDA声音设置 (18)无线信号预连接设置 (19)备注 (22)手持仪常见故障分析 (23)上位机环境配置(Windows XP)1.如果使用的上位机计算机的操作系统是WindowsXP,则需要在计算机上安装微软系统同步工具Microsoft ActiveSync 4.5.0或更高版本该软件。
上位机将Microsoft ActiveSync软件设置为开机自启动模式。
2.安装上位机驱动(1)打开PDA电源,并通过USB接口与PC机相连。
(2)若PDA第一次与PC机同步,则首先会提示安装驱动:(3)选择从列表或指定位置安装:(4)选择在送所中包括这个位置,点击浏览,定位到安装包中驱动所在文件夹Driver:(5)点击确定后,将会自动寻找驱动引导文件并安装驱动:(6)若碰到提示信息,则选择仍然继续:(7)完成安装后,若驱动安装正确,PC机将会与巡检仪进行同步,若碰到提示,则选择是,或者下一步即可,当同步连接成功,则打开Microsoft ActiveSync后将会出现下图画面PC机的右下角也会显示下面的小图标,未连接成功时为灰色,连接成功时为绿色,双击该图标,则可以弹出如下窗口:上位机环境配置(Windows7 32/64位)1.如果操作系统为Windows7系统,则不需要安装驱动,只需要安装同步软件即可,Windows7 32位系统请使用drvupdate-x86.exe同步软件安装包,而Windows7 64位请使用ActiveSync6.1_OfficialRelease-x64.exe同步软件安装包。
PDA掌上电脑程序说明
HHDEG掌上电脑测量程序集测绘通使用说明书新疆兵团勘测测绘分院目录第一章安装《掌上电脑测绘程序集》安装程序 (3)获取许可号 (3)卸载程序 (5)第二章计算类功能介绍极坐标计算 (6)支导线计算 (7)第三章放样类功能介绍点放样计算 (8)直线放样计算 (9)曲线放样计算 (10)第四章记录类功能介绍水平角记录 (12)水准记录 (14)第五章其它类功能介绍前方交会 (17)后方交会 (18)图幅查询 (19)第一章安装《掌上电脑测绘程序集》1、安装程序1.1连接好计算机与PDA,调试通后,运行cht.exe即可,程序会自动安装到PDA相应得地方。
1.2将自动安装程序cht.cab备份到PDA中,如需安装时,在PDA中点击此程序即可。
程序安装到PAD 后,其调用的位置在快捷菜单下,如图1所示。
图12、获取许可码本程序经过加密,为保护产权,使用者应取得许可码后,方能使用。
未取得许可码的用户,运行程序后的界面如下图2此时点击“获取ID号”按钮,将显示你PDA的机器号,界面如下图3。
图3将你的ID号核对无误后,发给作者,可以获得合法授权的版本使用。
正式的程序启动,界面如下图4:图4测绘通目前的主要功能有:1—极坐标计算,2—支导线计算,3—野外放样,4—前方交会,5—直线放线,6—曲线放线,7—图号查询,8—三角高程计算,9—水准记录,10—水平角记录,11—后方交会等主要项目。
根据不同的工作容,只需点击相应的选项即可。
3、卸载程序点击PDA开始页中的“设置-系统-删除程序”,选择测绘通,即可删除,如图5所示。
图5第二章计算类功能介绍1、极坐标计算当选择极坐标按钮时,界面如下图6所示图6按定向点后的OK钮,将出现如下图7的界面,如果PDA中预先存有已知点文件,点击查询按钮,可以从已知点文件中调用数据,如果没有,可以在编辑框输入,并将数据保存到指定的文件中,以备下次再用。
在曲线放样、后方交会中,没有这种调用数据的方法,可以在此程序中建立已知点文件,供其它程序使用。
PDAS9.5安装说明
1.下载解压后,打开软件安装目录,如下图2.双击PADS9.5_mib进行安装。
弹出如下对话框3.点击NEXT后出现如下视窗4点选SKIP出现以下视窗5.点选Agree后出现如下视窗6.点选进行自定义安装,出现如下视窗7,点选选择要安装的产品,根据你自己的需要选择,如下图因为单机用,所以要取消Server Services ,不要勾选。
8点击选择安装的路径,建议不要更改安装路径和文件名,采用默认安装。
并点选出现如下视窗9.点选Install进行安装。
安装界面如下10.安装完后,会出现如下视图,选再点结束安装。
11.接下来进行破解打LICENSE文件夹,开复制MentorKG.exe到安装目录C:\MentorGraphics直接运行破解程式MentorKG.exe,会出现如下视窗12.按回车键后出出现LICENSE的视窗13.将此文件另存为LICENSE.TXT,存放的路径为你软件的安装路径,例如C:\MentorGraphics\LICENSE.TXT14.(XP操作系统)添加一个环境变量。
方法:右键我的电脑—属性,出现如下视窗(win7操作系统)添加一个环境变量。
方法:桌面上——计算机—右键—属性。
弹出如下对话框点选环境变量,出现如下视图,新增一个用户变量。
变量名为MGLS_LICENSE_FILE 变量值为C:\MentorGraphics\LICENSE.TXT变量值就是我们安装14步LICENSE.TXT文件保存的路径和文件名。
15,。
执行PADS Layout 运行软件,出现如下视图破解完成。
如果这样还破解不了,直接运行PADS9.5_Crack文件夹中的Crack文件,三分钟后再打开软件,运行这个和谐文件是没有任何窗口弹出的软件软件设置成英文的方法:。
起航电子软件。
PDA操作手册
中邮物流综合信息平台版本号:V2.0 文档编号:速递物流综合信息平台PDA程序操作指南北京维深科技发展有限公司二○○九年九月文档管理信息表主题MC3000物流信息平台PDA操作指南版本V2.0.0内容PDA操作指南(出入库、配送操作)关键字参考文档提交时间2009-9-13撰写人刘继伟文档修改记录序号原章节号现章节号修改内容备注目录1 PDA应用程序安装 (1)1.1应用程序安装 (1)1.2操作主界面 (1)2 PDA入库操作 (2)2.1PDA批处理入库操作流程 (2)2.2使用PDA进行入库“扫描勾核” (2)2.2.1 下载进口勾核数据 (2)2.2.2 入库“扫描勾核”操作(PDA端) (4)2.2.3 常用功能键 (5)2.2.4 进口数据上传 (7)2.3PDA发送“总包条码”信息到中心局系统 (8)2.3.1 下载设备维护信息到PDA (8)2.3.2 扫描抄登方式发送数据到中心局系统 (9)2.3.3直接扫描方式发送数据到中心局系统 (17)2.4PDA无线入库操作 (24)3 PDA出库操作 (26)3.1PDA出库操作流程 (26)3.2批处理扫描勾核出库数据 (26)3.2.1 下载出口配发数据到PDA (26)3.2.2 PDA扫描勾核操作 (28)3.2.3 上传出口配发数据 (30)3.3PDA端发送勾挑数据到两网子系统 (32)3.3.1 下载设备维护信息到PDA (32)3.3.2 中心局系统预配发操作台 (33)3.3.3 PDA勾核配发信息 (34)3.3.4 发送“勾核配发”信息到中心局系统 (35)3.3.5 中心局系统出口配发方式 (36)3.3.6 中心局系统网上发送装车信息 (44)3.4PDA无线出库操作 (46)4 PDA配送操作 (48)4.1下载配送数据 (48)4.2PDA配送操作流程 (49)4.3配送数据回传 (51)41 PDA应用程序安装1.1 应用程序安装如果用户的PDA目前执行的程序没有退出按钮,无法退出到系统桌面,可按以下方式先卸载旧程序:请在MC3000设备上,先用触摸笔点一下屏幕使屏幕获得焦点,然后按住FUNC键,手不要松开.再按住CTRL键,手也不要松开.最后再按下F4键.此时屏幕上会弹出是否退出程序的提示,点是退出原应用程序.应用程序退出后,将MC3000通过通讯座与PC相连,将MC3000-Application目录下的所有以CNPL开头的文件都删除,然后查看是否有hwpenreg.reg文件,如有此文件也一并删除.再整个删除掉NJMZ文件夹.然后进入Application下的Startup文件夹.如果文件夹下有物流条码.exe文件或者是以CNPL开头的文件,一并删除.全部删除完成后,同时按1+9+电源键,冷启动设备.应用程序安装:将设备与计算机相连,根据PDA的实际情况(彩屏或黑白屏)将对应的PDA彩屏或者黑白屏文件夹下的所有内容复制到MC3000的Application文件夹下.再同时按1+9+电源键冷启动设备.程序即安装完成.此时可在MC3000-Application-Vision文件夹下运行“CNPL仓库管理系统.exe”文件,为操作方便,可选中该文件,在PDA点按文件——发送快捷方式,将该程序发送到桌面快捷方式,然后直接在PDA桌面进入程序即可。
PDA开发 驱动安装
PDA开发驱动安装
说明:此文档的作用是介绍PDA与电脑连接所需驱动安装。
安装驱动才能将PDA和电脑连接起来。
(Xp系统安装为例)
1:如下图所示;
Xp安装ActiveSyncsetup_PConline.msi文件
Win7安装drvupdate-x86.exe文件
2:安装,双击打开软件,进入下图。
3:点击上图中的“下一步”,进入下图
4:在上图中,选择“我接受许可协议中的条款”,点击“下一步”,进入下图。
5:在上图中,输入信息,点击“下一步”,进入下图。
6:点击“更改”,可以修改安装路径,也可以直接点击“下一步”安装。
下图是更改路径界面。
7:在上图中,修改好路径后点击“确定”,进入下图。
8:在上图中,点击“下一步”,进行安装。
9:在上图中,点击“安装”,进入安装,如下图。
10:安装成功界面,如下图。
pda硬件使用说明

S3000 Series 中文使用说明书版权声明本文内所收录信息为说明产品目前状况,不具保证之意涵,包括但不限于任何暗示性或可销售性保证、或适用于某一特殊目的之保证;本公司保留调整有关产品功能、规格、保修信息及本文内容等的权利,恕不另行通知。
本文内包含有受版权法保护的独家专利信息,版权所有。
除版权法允许部分,否则未得深圳速比邻有限公司书面同意,不得影印、重制作、修改或翻译部份或全部内容。
控制本产品的程序部分亦受版权法保护,版权所有,不得侵犯。
Microsoft、ActiveSync、Pocket IE、Pocket Word、Windows、Windows 98、Windows Me、Windows NT、Windows 2000、Windows XP、Windows 标志、Windows CE标志或为注册商标,或为Microsoft Corporation 在美国及/或其它国家之注册商标。
Microsoft产品为Microsoft Licensing, Inc.授权之OEM产品,Microsoft Licensing, Inc.为Microsoft完全拥有。
本文内所提及的所有其它品牌名称及产品名称皆为各该公司合法的商标名、服务标志或注册商标。
在使用本产品之前,请认真阅读本说明书第一章包装确认 (4)第二章S3000简介 (5)第三章开始使用 (17)第四章其它选购配备的操作 (42)第五章售后服务 (81)第一章 包装确认确认包装内容请于使用前先检查是否含有下列物品:˙下列硬体固件注意:单独配了三联充和多个电池的客户, 设备使用一段时间后,请将设充电器和USB 线底座S3000主机 电池 手腕绳和触摸笔备放在底座上来给主电池充电。
因为这样主电池还可以给备用电池充电。
(如果长时间不给备用电池充电,备用电池电量为0 的情况下,机器将出现无法开机的现象。
)第二章 S3000简介S3000产品资料介绍S3000系列产品是速比邻科技自主研发、设计、生产的针对各行业特点打造的系列工业级手持终端,外型采用人体工程学设计,轻巧灵活,防震防摔,待机时间长,采用双电源模式。
PDA无线点菜系统的操作说明
PDA无线点菜系统说明设计方:山东金达莱软件有限公司2007年10月一、PDA无线点菜系统的硬件说明 (2)二、 SQL Server 方式网络配置步骤 (3)三配置金达莱软件HtOMS (11)四金达莱餐饮服务行业管理软件中的设置 (18)五路由器的安装方法 (19)六 PDA服务端工具与PDA客户端工具的安装 (21)1服务端工具的安装 (21)2 PDA客户端工具的安装 (23)七 PDA如何进行网络配置 (25)八 PDA如何连接数据库 (27)九 PDA无线点菜的操作步骤 (28)1 开台操作 (28)2 点菜操作........................ 错误!未定义书签。
PDA无线点菜系统的操作说明一、PDA无线点菜系统的硬件说明无线点菜系统需要的硬件设备有无线宽带路由器、PDA、桌面式计算机。
符合下列系统要求的掌上电脑(PDA)一般情况下均可使用HtOMS无线点菜接口系统:1、掌上电脑(PDA)中的操作系统是Pocket PC,且版本在Windows 2003 Mobile(TM) 第二版 4.21或以上。
2、支持无线网络传输功能(PDA带有无线网卡。
Wifi 协议:802.11b及802.11?协议)。
3、建议型号:惠普(HP-1950),戴尔(DELL),宏基(ACER)等支持以上功能的掌上电脑(PDA)产品。
设备价一般在2300-3500元。
华硕2626其他说明:1、掌上电脑(PDA)是通过无线路由器(AP)连入局域网和HtOMS酒店系统服务器进行交互的,为此除必须配备掌上电脑(PDA)外,还需配置无线路由器(AP),使用时将路由器和和局域网电脑相连。
2、设备建议:建议选用高接收性能的的产品,以保证建筑物复杂的情况下,无线信号穿透良好、无线信号传输距离较长。
设备价一般在300-2000元。
二、SQL Server 方式网络配置步骤安装前提:您的所有机器均已连成网络,并已全部连通(在“网上邻居”中可互相看到。
PADS 9.5安装使用指南
官方主页网址:/products/pcb‐system‐design/desi)。 如图 1.1 所示:
1
图 1.1 点击下载 Pads 评估版,会跳转到图 1.2。
12
图 2.15
图 2.16 我们将证书文件放到了 PADS9.5 的安装目录。 4.在我的电脑图标上右键—>属性—>高级—>环境变量,如图 2.17。
13
图 2.17 6.单击环境变量后如图 2.18 所示。找到 MGLS_LICENSE_FILE 选项双击,进入图 2.19。
图 2.18
图 2.19 如图 2.19 所示将变量值,即红框内的值改为我们证书的路径,如:
PADS 9.5 安装使用指南
目录
前言 ............................................................................................................................................. 1 第一部分 软件的下载 ................................................................................................................. 1
1.1 如何从官方获取 Pads30 天试用软件? ..................................................................... 1 1.2 安装前的准备工作 ....................................................................................................... 4 第二部分 安装 ............................................................................................................................... 5 2.1 Pads 的安装 ........................................................................................................................ 5 2.2 如何激活软件? .............................................................................................................. 10 2.3 如何解决 Windows8 中 Pads logic 选项功能不能使用的问题? ............................... 13 祝语 .......................................................................................................................................... 15
BD90、BD95服务放大器安装指南bulletin号I G1463-000 USA说明书

BD90, BD95 Servo Amplifier Installation Guide Bulletin No. IG 1463-000/USAIndexGeneral Description (1)Summary of Features & Variations (1)General Specifications (1)Engineering Data....................................................................................................1 & 2Block Diagram (3)BD90 Servo Amplifier (3)BD95 Servo Amplifier (3)Standard Amplifier Features..................................................................................4 & 5 Signal Underrange Set-Up Procedure. (4)AC Input Power Set-Up Procedure (4)Internal 60Hz Dither Set-Up Procedure (5)External Dither Set-Up Procedure (5)BD90 Electrical Schematic....................................................................................6 & 7Typical Applications (8)Position Servo Wiring Schematic (8)Position Servo Set-Up Procedure................................................................... 8 & 9Velocity Servo Wiring Schematic (10)Velocity Servo Set-Up Procedure................................................................10 & 11 Dimensions. (12)Ordering Information (12)WARNINGFAILURE OR IMPROPER SELECTION OR IMPROPER USE OF THE PRODUCTS AND/ OR SYSTEMS DESCRIBED HEREIN OR RELATED ITEMS CAN CAUSE DEATH, PERSONAL INJURY AND PROPERTY DAMAGE.This document and other information from Parker Hannifin Corporation, its subsidiaries and authorized distributors provide product and/or system options for further investigation by users having technical expertise. It is important that you analyze all aspects of your application and review the information concerning the product or system in the current product catalog. Due to the variety of operating conditions and applications for these products or systems, the user, through its own analysis and testing, is solely responsible for making the final selection of the products and systems and assuring that all performance, safety and warning requirements of the application are met.The products are described herein, including without limitation, product features, specifications, designs, availability and pricing, are subject to change by Parker Hannifin Corporation and its subsidiaries at any time without notice.General DescriptionThe ‘BD90/95’ Servo Amplifiers are high performance amplifiers that are designed to work with our ‘BD’ and ‘ST’ series of Servo Valves. The amplifiers are packed with many desirable features that make it an extremely versatile performer in motion control systems.Summary of Features and Variations•Voltage or Current Commands — The user has the option of command input ranges of either ± 14 VDC, or ± 28 mA.•Two Differential Input Feedback Amplifiers —Both inner and outer loops have Proportional-Integral-Derivative gain.•Built-in Power Supply — The ‘BD90’ has its own power supply with inputs rated at either 115 VAC or 230 VAC.•Dither Circuitry — The user can select either the on-board 60 Hz dither circuit, or input his own external dither frequency.•Reference Power Supply — A reference supply voltage of ± 15 VDC @ 350 mA, and ± 10 VDC @50 mA.•External Logic Shutdown — Allows the user to shut down the output to the valve by applying an external voltage signal.•Convenient Mounting — The BD90/95 mounts in a convenient standard "Snap-Trac" mount.•Plug-in Terminal Strips — This feature makes it unnecessary to remove the wires from the terminal strip.General Specifications•Power Supply –BD90 - 115 VAC or 230 VAC @ 30 VA, 50/60 Hz BD95 - ±15 VDC @ 350 mA •Command Signal Range –± 14 VDC, ± 28 mA•Input Impedance on Command Terminals –100 K ohms minimumEngineering DataCommand Signal PreamplifierThe command signal can either be voltage or current.Installing J1 configures the amplifier into a current mode. The command amplifier has zero and span potentiometers so that the command signal can be scaled to match the feedback signal. The preamp gain can be multiplied 5 or 10 times by installing J5 or J6respectively.1st Feedback PreamplifierThis amplifier is a true differential amplifier, with a gain of one. The differential input allows for the connection of either positive or negative feedback signals with respect to the command signal. This ensures that the feedback signal will always be of the opposite sign of the command signal. Additionally, a differential configuration affords the user the luxury of using an electrically floating feedback sensor. A floating sensor with a well shielded cable is the optimum configuration for common mode noise immunity.•Input Impedance on Feedback Terminals –50 K ohms minimum •Operating Temperature Range –32° F to 158° F (0° C to 70° C)•Reference Voltage Supplies –± 15 VDC @ 350 mA ± 10 VDC @ 50 mA•External Logic Shutdown Voltage Required – +4 to +10 VDCGeneral Specifications (con't)2nd Feedback PreamplifierSimilar to the 1st feedback amplifier, the 2nd feedback preamp also has a true differential input. It has its own zero and span potentiometers, therefore its input signal can be scaled to match the summed signals of the 1st feedback and command signals. If the input signal requires additional amplifying, it can be multiplied 5 or 10 times by installing J18 or J19 respectively.1st PIDAfter the command and feedback signals are summed, the resultant signal is fed through a PID (Proportional-Integral-Derivative) section. The proportional part of the circuit is always present, but the integration and differentiation segments must be selected. The PID gains control of the closed loop dynamics in the following way:Proportional Gain affects the system stiffness and accuracy. As the proportional gain is adjusted higher, the influence of the feedback signal becomes greater. If the gain is sufficiently high, the system will oscillate. This happens because very small transducer changes are amplified into very large error signals, and the mechanical inertia will not allow the system to follow the electronic command. The system lag will eventually reach a point where the feedback and the command signals are in phase and oscillation results. When this occurs, the gain must "be backed off" until the system is stable. See the section on "Derivative Gain" for additional help with the oscillation dilemma.Integral Gain gives the system static disturbance compensation. The integrator smooths out system ripple. A most typical case is found in the velocity control loop application. As the tachometer follows the motor, its output develops a small ripple voltage in addition to the steady voltage corresponding to RPM. The ripple is the result of the motor speed increasing and decreasing. This small change in speed is due to the response time of the control loop. The integrator is introduced to the system to slow the electronic response time to match the mechanical elements of the system. It is not uncommon for integrator to improve the speed regulation of a velocity control loop at least five times greater than when a pure proportional loop. Derivative Gain gives the system damping. When a servo system requires considerable stiffness or accuracy, the system can be oscillatory due to system lag. To counter the system lag, include the derivative section of the PID loop. The derivative section introduces lead to counteract the natural system lag and thereby stabilizes the system.2nd PIDThe second PID is included to handle the second feedback sensor and works exactly like the first PID section.Internal and External Shutdown(See Figure 3, 4, & 9)Both BD90 and BD95 have a selectable command or feedback underrange shutdown, (see Figure 9). This feature allows the user to select an underrange input level that forces the valve drive current to go to zero. For example, when the command signal is a 4 to 20 mA current signal, and the signal drops below 4 mA, the board can be adjusted to drop the valve current to zero. External ShutdownThis feature allows the user to shutdown the output by simply applying a voltage signal of +4 to +10 volts to P2-3.Dither(See Figure 5 & 6)Both the BD90 and BD95 have dither capability for reducing system stiction. The BD90 has an internal 60 Hz power source for dither. In addition, each of the boards has a terminal for hooking up an external frequency generator. A pot is included on the boards for attenuating the signal amplitude. The BD90 has jumpers which allow the user to select either the external generator or, more conveniently, the internal 60 Hz signal.Power SuppliesThe user must provide a fuse for this line voltage input. Recommended valves are: 1/4 AMP fast blow for 115 VAC and 1/8 AMP fast blow for 230 VAC. Reference Power SuppliesA buffered ± 10 VDC reference is provided for excitation of command and feedback pots. The full load current capacity is ± 50 mA. A ± 15 VDC excitation voltage is provided for powering external loads such as additional BD95 Servo Amplifiers, Parker Hannifin's 2HX-LDT, etc. The maximum load is not to exceed +350 mA.Figure 1 — BD90 Servo Amplifier Block DiagramFigure 2 — BD95 Servo Amplifier Block DiagramFigure 3 —Standard Amplifier FeaturesFigure 4Figure 7—115 VAC InputFigure 8 —230 VAC Input AC Input Power Set-Up Procedure4-20 MilliampSignal Underrange Set-Up Procedure*:1.Install J1, J2, J4 & J10; Remove J3 & J9.2.Apply the required current signal level for shutdown to P1-6.3.Adjust R12 until the Servo Valve triggers to null (i.e., Coil current goes to zero).*The underrange shutdown feature will also work on voltage inputs. For set-up assistance, please consult the factory.External Dither Set-Up Procedure:1.Install J30; Remove J29.2.Apply the required frequency to P3-1 W.R.T. P3-2.The signal amplitude should not exceed ± 15 V.3.Adjust R87 to the required dither output. As a rule of thumb the dither level should be kept below ± 10%of the rated current of the valve.Figure 6Figure 5Internal 60 Hz Dither Set-Up Procedure:1.Install J29; Remove J30.2.Adjust R87 to the required dither amplitude. As a rule of thumb the dither level should be kept below ± 10% of the rated current of the valve.Figure 9 — Standard Amplified Features Jumper and Adjustment LocationsFigure 10 — BD 90 Electrical SchematicTypical ApplicationsThe BD90 and BD95 Servo Amplifiers are general purpose amplifiers which are extremely versatile and can provide the servo controls needed for many diverse applications. Included in this section are the wiring schematics and graphic displays to provide you with the "know how" to hook up and configure the board for your particular application. The first, and most common application, is one where an accurate position must beattained. The second is a velocity control application where motor speed is the most commonly controlled parameter.Other special control functions can be realized by using the BD Series Servo Amplifiers. Contact your localParker representaive fo assistance.5.Adjust R76 so that P3-6 W.R.T. P3-5 reads 0.0 volts.6.Adjust the position command pot so that P1-6 W.R.T.P1-5 reads -10.0 volts.7.Adjust R13 so that TP1 reads +10.0 volts W.R.T.P1-5.8.Adjust R24 so that TP5 W.R.T. P1-5 reads +10.0volts.Figure 11 — Position Servo Wiring Schematic Set-Up Procedure:1.Wire board per Figure 11.2.Install J12, J17, J22, J27, J28, J33, J35, J37, & J39.Temporarily short P1-1 to P1-2.3.Power up the electronics. Then adjust the position command pot so that P1-6 with respect to (W.R.T.)P1-5 reads 0.0 volts. (See Fig. 11)4.Adjust R7 so that the voltage at TP5 W.R.T. P1-5reads 0.0 volts.Figure 12 — Position Servo Board Signal Block Diagram Set-Up Procedure: (con't)9.Adjust R119 so that P3-6 W.R.T. P3-5 reads -0.6 volts(60mA coil). For valves with other rated currents, theR119 adjustment should be: rated current divided by100, ie., a 40mA valve would be divided by 100 or0.4 volts.10.Remove short on P1-1 & P1-2 and install the feedbackpot. (See Fig. 11)11.Power up the electronics first and then slowly turn thehydraulics on.12.If the system is phased wrong, the actuator will immediatelyextend or retract to its limit. If this happens, verify that the command and feedback pots are wired per Figure 11. If they are, then reverse the wires on P3-4 & P3-6 andrepeat step 11.13.If the system seems sluggish, adjust R24 until the systemhas the proper performance level. If the system is stillsluggish, back-off R24, install J13, then readjust R24. Note: It is recommended that the coil current be limited to the valve rating. This is done by adjusting R119 to the valve current rate, when the command signal is at full scale. Loop gain will be affected when R119 is changed. Therefore, the gain pots in PID section will need readjusting to return the system to its proper stiffness.Figure 13 — Position Servo Jumper and Adjustment LocationsFigure 14 — Velocity Servo Wiring Schematic Set-Up Procedure:1.Wire board per Figure 14.2.Install J12, J17, J22, J27, J28, J33, J35, J37, & J39.Temporarily short P1-1 to P1-2.3.Power up the electronics. Then adjust the velocitycommand pot so that P1-6 W.R.T. P1-5 reads 0.0 volts. (See Fig. 14.)4.Adjust R7 so that the voltage at TP5 W.R.T. P1-5reads 0.0 volts.5.Adjust R76 so that P3-6 W.R.T. P3-5 reads 0.0 volts.6.Adjust the velocity command pot so that P1-6 W.R.T.P1-5 reads -10.0 volts.7.Adjust R13 so that TP1 reads +10.0 volts W.R.T. P1-5.8.Adjust R24 so that TP5 W.R.T. P1-5 reads +10.0 volts.9.Adjust R119 so that P3-6 W.R.T. P3-5 reads -0.6 volts(60mA coil). For valves with other rated currents, the R119 adjustment should be: rated current divided by100, ie., a 40mA valve would be divided by 100 or 0.4 volts.10.Remove short on P1-1 & P1-2 and install the feedbacktachometer. (See Fig. 14.) Run velocity commandpot to zero.11.Power up the electronics first and then slowly turn thehydraulics on.Figure 16 — Velocity Servo Jumper and Adjustment LocationsFigure 15 — Velocity Servo Board Signal Block Diagram 15. If the system tends to oscillate with rapid changes inthe command pot, add the differentiator section by adjusting R25 fully ccw, removing J17, and installing J14 & J16. Adjust R25 cw until the system has proper damping.Note: It is recommended that the coil current be limited to the valve rating. This is done by adjusting R119 to the valve current rate, when the command signal is at full scale. Loop gain will be affected when R119 is changed. Therefore, the gain pots in PID section will need readjusting to return the system to its proper stiffness.Set-Up Procedure: (con't)12. If the system is phased wrong, the hydraulic motor willimmediately start running at full speed. If thishappens, verify that the command pot and feedback are wired per Figure 14. If they are, then reverse the wires on P3-4 & P3-6 and repeat step 11.13.If the system seems sluggish, adjust R24 until thesystem has the desired response to changes on the velocity pot. If the system is still sluggish, back-off R24, install J13, then readjust R24.14. If tighter velocity control is required, you must add anintegrator to the loop. (See discussion page 2.)Adjust R23 fully ccw. Remove J12 and add J11. AdjustR23 cw until the velocity stability is optimized.DimensionsMillimeter equivalents for inch dimensions are shown in (**).Servo Amplifierfor BD and ST Series Servo ValvesBDOrdering InformationDescription Code 95±15 VDC90115 VAC Input PowerBD95 Servo AmplifierBD90 Servo AmplifierFigure 17 — BD90 & BD95 Servo Amplifiers,Snap Trac Dimensions3.40(86.4)15.0(381)3.25(82.6)1.75(44.5)11.25(285.8)1.19(30.2)NOTESHydraulic Valve Division520 Ternes AvenueElyria, Ohio 44035Phone: (216) 366–5200Fax: (216) 366–5253EG, 5M, 5/91。
PDA系统安装配置文档
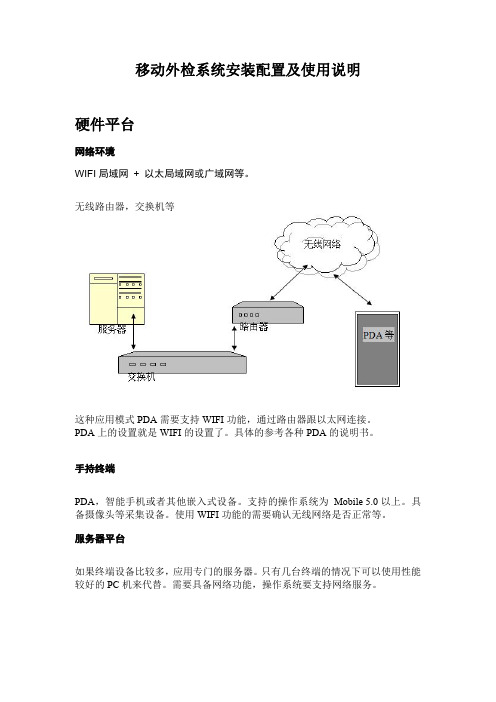
移动外检系统安装配置及使用说明硬件平台网络环境WIFI局域网+以太局域网或广域网等。
无线路由器,交换机等这种应用模式PDA需要支持WIFI功能,通过路由器跟以太网连接。
PDA上的设置就是WIFI的设置了。
具体的参考各种PDA的说明书。
手持终端PDA,智能手机或者其他嵌入式设备。
支持的操作系统为Mobile5.0以上。
具备摄像头等采集设备。
使用WIFI功能的需要确认无线网络是否正常等。
服务器平台如果终端设备比较多,应用专门的服务器。
只有几台终端的情况下可以使用性能较好的PC机来代替。
需要具备网络功能,操作系统要支持网络服务。
软件环境数据库系统SQL SERVER2000+SP4或者ORACLE等大型数据库。
推荐使用SQLSERVER2000+SP4形式。
服务器。
使用windows2003系统搭建服务系统。
需要具备:FTP服务,数据库服务等。
软件安装步骤1、安装服务器系统1安装windwos server2003R2具体安装步骤请自行参考相关资料2安装IIS服务(我们需要FTP服务器)a)打开控制面板的添加删除程序,界面如下:b)点击“添加/删除Windows组件”c)选择应用程序服务器双击进入:d)选择Internet信息服务(IIS)再双击:e)选择上文件传输协议(FTP)服务一路确认下去。
如果安装过程当中提示插入SP2的光盘之类的提示或者提示缺少文件,请先安装SP2的补丁,再进行上面的步骤,即可安装成功IIS服务。
3配置FTP服务器:a)打开Internet信息服务(IIS)管理器.如下:展开我们刚刚安装上的服务管理器,<A href="/">手持终端</A>可以看到有FTP站点等多个应用服务。
点击默认的FTP站点的属性:可以看到:切换到主目录选项卡,我们使用此计算机上的目录。
允许对目录进行写入读取。
路径可以按下浏览按钮指向我们的PDA服务程序的图片主目录:C:\data\store\这个目录里面还有很多对应PDA终端名称的目录,那些不能动。
PDA使用说明

目录一、PDA键位说明 (3)二、操作说明 (3)(一)PDA【开机】 (4)(二)【登录】软件 (4)(三)下载【巡检线路】 (5)(四)进行【巡检】 (7)(五)多人巡检 (10)(六)【上传】巡检单 (11)(七)【充电】及【关机】 (12)(八)PDA驱动设置 (13)三、PDA运行报告 (16)1. 充电量分析 (16)2. 下载巡检单所用时间 (16)3. 电量消耗分析 (16)四、常见问题 (17)1.PDA在使用过程中,出现卡屏,死机等现象 (17)2.上传失败 (17)3.下载时提示没有巡检单 (17)4.遇到丢点怎么办? (20)5.怎样去更换巡检点? (20)6.PDA在巡检过程中,报扫描码不匹配? (21)7.修复USB接口 (22)五、应急预案 (23)1.丢点 (23)3.PDA无法开机。
(24)4.PDA损坏 (24)5.PDA丢失 (24)一、 PDA 键位说明二、 操作说明【上】、【下】、【左】、【右】选择键【——】 删除键【红色按钮】 开/关机键【F4】选择下载 巡检日期【黄色按钮】 扫描确认键【——】确认键/快速选择键【数字】 数字键【F2】 照相键【F1】 小数点【F3】 跳点键(一)PDA【开机】可用PDA自带手写笔长按PDA右下角【红色按钮】(3-5秒),即可完成【开机】操作,如图1所示;图2、图3为PDA【开机】显示界面。
图1——【开机】图2——【开机】读取数据图3——【开机】界面(二)【登录】软件1、PDA开机后双击屏幕上方【物业通】快捷方式,如图4所示:图4——【登陆】软件2、输入用户名和密码,点击【登录】/【离线登陆】(连接电脑时选择【登陆】,巡检时选择【离线登陆】),如图5所示:图5——输入用户名、密码(三)下载【巡检线路】1、打开已安装【PDA同步软件】及【极致软件】的电脑,用数据线连接电脑后,操作PDA 。
2、PDA开机后,进入【物业通】,点击【登录】,进入系统即可看见PDA【物业通】操作界面,如图4、图5所示:图6——PDA【物业通】界面3、点击【巡检】,如图6所示,进入到下载巡检单界面,按【F4】,选择日期,如图7、图8所示,选择下载日期,点击右上角刷新,刷新下载新的巡检任务,如图9所示。
机动车检测线PDA相关软件安装、操作说明及注意事项
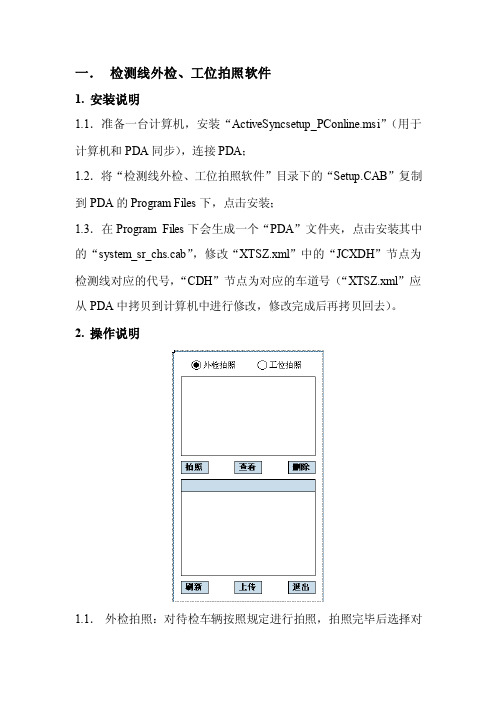
一.检测线外检、工位拍照软件1.安装说明1.1.准备一台计算机,安装“ActiveSyncsetup_PConline.msi”(用于计算机和PDA同步),连接PDA;1.2.将“检测线外检、工位拍照软件”目录下的“Setup.CAB”复制到PDA的Program Files下,点击安装;1.3.在Program Files下会生成一个“PDA”文件夹,点击安装其中的“system_sr_chs.cab”,修改“XTSZ.xml”中的“JCXDH”节点为检测线对应的代号,“CDH”节点为对应的车道号(“XTSZ.xml”应从PDA中拷贝到计算机中进行修改,修改完成后再拷贝回去)。
2.操作说明1.1.外检拍照:对待检车辆按照规定进行拍照,拍照完毕后选择对应车辆上传即可(点击“刷新”获得当前在线车辆)。
1.2.工位拍照:对抓拍系统出现问题的工位可以选择用PDA代替进行工位拍照,首先选择待拍照的工位,然后按照规定进行拍照,最后上传即可。
3.注意事项1.1.PDA连接无线网络:“开始”>“设置”>“连接”>“WLAN”,找到对应的无线网络,设置网络密钥,连接。
二.查验软件1.安装说明1.1.准备一台计算机,安装“ActiveSyncsetup_PConline.msi”(用于计算机和PDA同步),连接PDA;1.2.将“查验软件”目录下的“Setup.CAB”复制到PDA的Program Files下,点击安装;1.3.在Program Files下会生成一个“V ehExamine”文件夹,点击安装其中的“system_sr_chs.cab”、“NETCFv35.Messages.zh-CHS.wm.cab”。
2.操作说明1.1.启动软件后,输入用户代号和用户密码,点击“登录”进入系统;1.2.在“基本信息”选项卡中输入已经注册查验的车辆的流水号点击“查询”查看相关信息,信息确认无误后点击“开始查验”开始查验;1.3.在“查验项目”选项卡中对待查验的各个项目进行评定,对不需要查验的项目评定为“—”,查验不合格的项目评定为“×”,查验合格的项目不做处理或者评定为“√”,最后选择查验结论。
(2)、PDA安装连接说明(Word版)
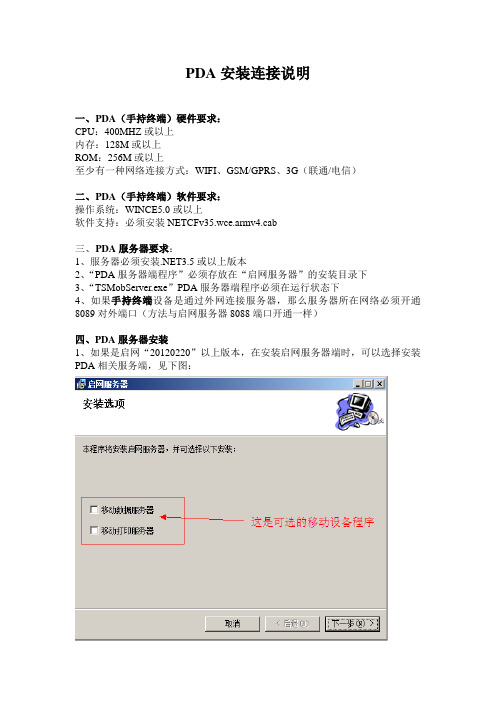
PDA安装连接说明一、P DA(手持终端)硬件要求:CPU:400MHZ或以上内存:128M或以上ROM:256M或以上至少有一种网络连接方式:WIFI、GSM/GPRS、3G(联通/电信)二、P DA(手持终端)软件要求:操作系统:WINCE5.0或以上软件支持:必须安装NETCFv35.wce.armv4.cab三、P DA服务器要求:1、服务器必须安装.NET3.5或以上版本2、“PDA服务器端程序”必须存放在“启网服务器”的安装目录下3、“TSMobServer.exe”PDA服务器端程序必须在运行状态下4、如果手持终端设备是通过外网连接服务器,那么服务器所在网络必须开通8089对外端口(方法与启网服务器8088端口开通一样)四、PDA服务器安装1、如果是启网“20120220”以上版本,在安装启网服务器端时,可以选择安装PDA相关服务端,见下图:2、如果是旧版本的启网软件安装PDA,或升级PDA部分程序:A、先关闭“TSMobServer.exe”程序(新安装可跳过此步)B、把PDA服务器相关的文件,拷贝到启网服务器安装目录下,一般默认路径为:D:\startnet_server\ (具体视安装情况而定)C、重新运行“TSMobServer.exe”程序即可五、PDA手持终端安装1、把PDA客户端的所有文件,存放在一个文件夹下,拷贝到PDA终端的ROM 中;2、执行“TSNETMOBILE.exe”程序即可六、PDA打印服务器的设置1、PDA的打印服务器不一定要在启网服务器上使用,可以在任何一台与PDA (手持终端)同一局域网内的电脑上安装,此电脑必须连接打印机;2、把PDA的打印服务器的文件放在一个文件内,运行“TSPrinter.exe”即可;3、设置连接启网服务器的方式:动态连接(必须输入用户号);指定IP地址(必须输入服务器的固定IP地址)4七、远程控制PDA(手持终端)设备1、确认(受控端)手持设备与(控制端)电脑同在一个局域网内,并且相互ping 通2、运行(控制端)电脑上的“远程帮助(服务器)”程序(),并选择“TOOLS”——“SEND ALL MOUSE MOVE”3、执行(受控端)手持设备上的“”程序,选择连接(connect),如下图:然后在连接地址中,输入(控制端)电脑的IP地址,确定就可以了八、PDA终端配置文件说明(一般情况下不需要修改。
PDS-PDA动测仪作业指导书
PDS-PDA基桩动测仪作业指导书文件编码:版次:控制状态:编制:审核:批准:2012年08月09日发布2012年08月09日实施更改页记录目录第1章概况 (1)1.1 基本情况 (1)1.2 仪器特点及技术参数 (1)第2章现场检测工作程序 (2)2.1 前期准备 (2)2.2 仪器准备 (2)2.3 现场检测 (3)2.4 检查与抽查 (9)2.5 曲线识别与故障排除 (9)第3章数据传输与资料验收 (10)3.1 数据传输 (10)3.2 资料验收 (11)第4章数据处理与解释 (11)4.1 数据处理 (11)4.2 资料解释 (12)第5章复测、验证与扩大检测 (12)5.1 复测 (12)5.2 验证检测 (13)5.3 扩大检测 (13)第6章报告编制、发放及归档 (13)6.1 报告编制、发放 (13)6.2 资料归档 (14)第7章仪器的检定与维护 (15)7.1 仪器检定 (15)7.2 仪器维护 (15)7.3 仪器的安全 (16)7.4 仪器的维修 (16)附录常见问题的解决 (17)第1章 概 况为确保检测人员对PDS-PDA 基桩动测仪的正常操作与维护,特制定本作业指导书。
1.1 基本情况1.1.1 PDS-PDA 桩基动测仪PDS-PDA 桩基动测仪是由武汉岩土星科技开发公司开发生产的一体化高分辨浮点动测仪,其外观如右图所示。
1.1.2仪器证书及编号见下表。
1.1.2 授权操作人仪器的操作人员必须是取得重庆市建委基桩检测资质的技术人员,非获证人员只有在有证人员的全程指导及监督的情况下方可进行仪器操作。
授权操作人包括:陈志军、周建军、柏长卫、童广现、董麒麟、熊华山、王赐鸿、刘智慧、杨剑平、陈建、胡春渝。
1.2 仪器特点及技术参数1.2.1主要特点 系统功耗低、稳定性高、环境适应性高、体积小重量轻。
1.2.2技术参数:通道数4道、A/D转换 24 位144 d B、浮点增益 10 位60 d B、触发方式内、外、信道、频响范围0.1 Hz ~10 KH z、系统误差<3 ‟、噪声电平<6 uVrs m、滤波方式五档低通、采样间隔 10 μs~60 m s 可选、采样点数512 1024 2048可选、最大功耗4W、主机重量<1 K g、体积 160 × 90 × 35 mm。
PDA操作手册1.2

PDA操作手册1.2PDA数据采集操作手册一、PDA数据采集前的准备工作1.1、PDA注册1.1.1连接电脑首先,要在电脑中下载一个手机助手,360手机助手、金山手机助手、豌豆荚、腾讯手机助手、91手机助手等都可以,方便拷贝数据。
点击主屏幕上右上角的六个小白点,找到【设置】,点击最下面一行【关于平板电脑】,进入后点击倒数第三行的【版本号】,迅速连点7下,返回上一界面,在【关于平板电脑】上面会出现一项【开发者选项】,点击【开发者选项】,勾选【USB调试】。
再将PDA连接电脑,打开事先下载好的手机助手,等待安装驱动,如果没有反应,可以把PDA的数据线拔出重新连接,多试几次。
PDA与电脑连接成功后,点击手机助手中的文件管理,找到PDA 的根目录,即内置存储卡(SD卡-1),将需要拷入到PDA中的文件拖进来即可。
首次安装时需要拷贝3个文件夹和2个APK文件到PAD根目录下,分别是:sso、thtf3和thtf3ec共3个文件夹【QQ群共享里是以压缩包的形式上传的,下载后需要解压,以文件夹的形式传到PDA的内置存储卡中】、国家统计局移动终端管理平台-DV5.0.4(终端管理)、同方三经普移动数据采集系统_TV5.0.10(数据采集客户端)2个apk文件。
注:上图中终端管理和经济普查程序版本号不是最新版本号,大家操作时以最新版本为准。
其中thtf3文件夹内含有5个文件夹,1、app文件夹里存放的是更新程序【如果以后程序有更新,可以将更新后的apk文件放在此文件夹中,直接双击新的apk程序即可更新】2、dc文件夹里存放的是底册,压缩包:210283.zip【以后个体户的底册也要放到此文件夹中】3、map文件夹存放的是地图,压缩包以城关街道为例:data_210283001000.zip【群共享中以地图包上传,内含庄河所有街道和乡镇的地图,PDA可以根据文件名上的行政区划代码自行查找所需普查区的地图】4、other文件夹5、zd文件夹存放的是经济普查制度包,压缩包:thtf_zd.zip【以后如果制度需要更新,则把更新后的制度压缩包放到此文件夹】。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
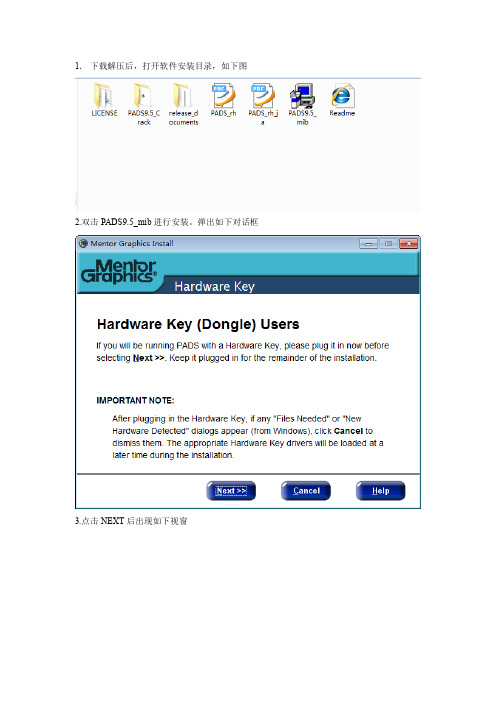
1.下载解压后,打开软件安装目录,如下图
2.双击PADS9.5_mib进行安装。
弹出如下对话框
3.点击NEXT后出现如下视窗
4点选SKIP出现以下视窗
5.点选Agree后出现如下视窗
6.点选进行自定义安装,出现如下视窗
7,点选选择要安装的产品,根据你自己的需要选择,如下图
因为单机用,所以要取消Server Services ,不要勾选。
8点击选择安装的路径,建议不要更改安装路径和文件名,采用默认安装。
并点选出现如下视窗
9.点选Install进行安装。
安装界面如下
10.安装完后,会出现如下视图,选再点结束安装。
11.接下来进行破解
打LICENSE文件夹,开复制MentorKG.exe到安装目录C:\MentorGraphics直接运行破解程式MentorKG.exe,会出现如下视窗
12.按回车键后出出现LICENSE的视窗
13.将此文件另存为LICENSE.TXT,存放的路径为你软件的安装路径,例如C:\MentorGraphics\LICENSE.TXT
14.(XP操作系统)添加一个环境变量。
方法:右键我的电脑—属性,出现如下视窗
(win7操作系统)添加一个环境变量。
方法:桌面上——计算机—右键—属性。
弹出如下对话框
点选环境变量,出现如下视图,新增一个用户变量。
变量名为MGLS_LICENSE_FILE 变量值为C:\MentorGraphics\LICENSE.TXT
变量值就是我们安装14步LICENSE.TXT文件保存的路径和文件名。
15,。
执行PADS Layout 运行软件,出现如下视图
破解完成。
如果这样还破解不了,直接运行PADS9.5_Crack文件夹中的Crack文件,三分钟后再打开软件,运行这个和谐文件是没有任何窗口弹出的
软件软件设置成英文的方法:。
起航电子软件。