智能交通路口图 Model (1)
(完整版)智能交通ppt

在高速公路上,通过智能驾驶辅助系统实现车辆的自动驾驶功能 ,提高行车安全和舒适度。
智能停车系统
通过智能识别和自动控制技术,实现停车场内的车辆自动泊车和 取车功能,提高停车效率和便利性。
05
智能交通发展前景与挑战
技术创新与发展趋势
自动驾驶技术
自动驾驶汽车在智能交 通系统中扮演重要角色 ,通过传感器、算法和 地图数据实现车辆自主 导航和行驶。
5G通信
利用5G高速、低时延的通信特性,实现车辆与云端、车辆与车辆 之间的实时信息传输。
无线传感器网络(WSN)
利用无线传感器节点之间的通信,实现对交通环境参数的实时监测 和数据传输。
计算技术
01
02
03
云计算
通过虚拟化计算资源(如 服务器、存储设备、数据 库等),实现对海量交通 数据的存储和处理。
(完整版)智能交通
汇报人:可编辑 2023-12-22
目录
• 智能交通概述 • 智能交通技术 • 智能交通系统建设与运营 • 智能交通应用案例分析 • 智能交通发展前景与挑战
01
智能交通概述
பைடு நூலகம்
定义与发展
定义
智能交通系统(Intelligent Transport System,简称ITS)是指利用先进的信 息技术、通信技术、传感技术等,对传统交通运输系统进行智能化改造,实现 交通系统的智能化、高效化和安全化。
大数据技术
利用大数据技术对海量交 通数据进行挖掘和分析, 提取有价值的信息,为交 通决策提供支持。
人工智能技术
通过机器学习、深度学习 等技术对交通数据进行学 习和建模,实现对交通行 为的预测和决策。
控制技术
协同控制
智能交通ppt模板

03
智能交通系统为乘客 提供实时公交信息、 出行路径规划等服务, 使出行更加便捷。根 据调查,使用智能交 通系统的用户对出行 满意度提高了10%以 上。
04
智能交通系统通过优 化路网布局、引导绿 色出行等方式,有助 于减少碳排放。据研 究,智能交通系统实 施后,城市公共交通 的平均能耗降低了5%.
组成要素及其作用]
Logo/Company
智能交通系统在城市 发展中的作用。
The role of intelligent transportation systems in urban development.
汇报人:XXX 202X.XX.XX
目录
Contents
01.
智能交通系统的概念与构成
智能交通系统是通过先进的信息技术、数据通信传输技术、电子传感技术、控制技术和计 算机技术等综合应用于整个道路交通管理系统,实现交通流的优化调度和安全高效通行。
+
05
智能交通系统在道路 交通管理中的应用
The Application of Intelligent Transportation Systems in Road Traffic Management
实时路况信息发布]
实时路 况
智能交 通系统
交通安 全
交通效 率
Real time road
condition information
数据安全与隐私保护问题]
优化交通流量 智能交通系统通过实时数据分析,预测交通流量,合理调配交通资源, 减少拥堵。 提高道路安全 智能交通系统可以实时监控道路状况,及时发出警示,减少交通事故的 发生。 节能减排 智能交通系统通过优化信号灯控制,降低汽车怠速时间,有效降低能耗 和排放。 促进产业发展 智能交通系统的建设和应用,推动了大数据、云计算等相关产业的发展。
2024版智慧交通优秀ppt课件
智慧交通优秀ppt课件contents •智慧交通概述•关键技术及应用领域•城市规划与智慧交通融合发展•政策法规与标准规范解读•挑战、问题及对策建议•总结与展望目录01智慧交通概述智慧交通是运用物联网、云计算、大数据、人工智能等技术手段,对交通管理、交通运输、公众出行等交通领域全方面以及交通建设管理全过程进行管控支撑,使交通系统在区域、城市甚至更大的时空范围具备感知、互联、分析、预测、控制等能力,以充分保障交通安全、发挥交通基础设施效能、提升交通系统运行效率和管理水平,为通畅的公众出行和可持续的经济发展服务。
定义随着5G 、物联网等技术的不断发展,智慧交通将朝着更加智能化、自动化、高效化的方向发展,实现车路协同、自动驾驶等先进功能。
发展趋势定义与发展趋势基础设施车辆与设备数据中心应用平台智慧交通系统组成要素包括道路、桥梁、隧道、交通信号灯等交通基础设施,以及与之相关的感知设备和通信网络。
用于存储和处理交通数据的中心,包括云计算平台、大数据处理系统等。
包括各种汽车、公共交通车辆、特种车辆等,以及车载设备、智能终端等。
提供各种智慧交通应用服务的平台,如交通管理平台、出行服务平台等。
国内外智慧交通发展现状对比国内发展现状近年来,我国智慧交通建设取得了显著进展,多个城市开展了智慧交通示范工程建设,推动了交通行业的转型升级。
但是,在智慧交通系统建设、数据共享、技术创新等方面仍存在一些问题和挑战。
国外发展现状相比国内,国外智慧交通发展较早,技术更加成熟。
一些发达国家已经实现了车路协同、自动驾驶等先进功能,并在交通管理、出行服务等方面取得了显著成效。
同时,国外也非常注重智慧交通系统的安全性和隐私保护。
02关键技术及应用领域大数据分析与挖掘技术在智慧交通中应用交通流量预测利用大数据分析技术,对历史交通流量数据进行挖掘和分析,预测未来交通流量变化趋势,为交通规划和调度提供决策支持。
交通拥堵识别与疏导通过实时监测道路交通状况,利用数据挖掘技术分析交通拥堵成因,及时发布交通疏导信息,缓解交通拥堵压力。
(完整版)智能交通ppt

和趋势。
交通信息发布系统
信息发布方式
通过广播、手机APP、交 通诱导屏等多种方式发布 交通信息,方便公众获取 实时交通情况。
信息定制化
根据用户需求,提供个性 化的交通信息服务,如定 制的路线规划、拥堵路段 提醒等。
信息交互
提供信息反馈渠道,让用 户能够提供自己的交通意 见和建议,促进信息的交 互和共享。
数据预处理
对原始数据进行清洗、过 滤和分类,以便更好地处 理和应用。
交通信息处理系统
信息融合
01
将不同来源的交通信息进行融合,提高数据的准确性和可靠性
。
数据分析
02
对融合后的交通数据进行深入分析,提取有用的信息,如交通
拥堵区域、事故多发路段等。
预测模型
03
利用历史数据和实时数据,构建预测模型,预测未来交通状况
案例三:某公共交通系统的智能化升级
要点一
总结词
要点二
详细描述
该案例介绍了某公共交通系统如何通过智能化升级提高服 务质量,提升乘客出行体验。
该公共交通系统进行了智能化升级,引入了智能调度系统 、车载监控和信息发布系统等。通过智能调度系统,优化 了车辆运行计划,减少了乘客等待时间。车载监控则保障 了乘客安全,及时应对突发情况。信息发布系统则提供了 实时到站信息和天气预报,方便乘客安排出行计划。这些 智能化措施提升了公共交通系统的运营效率和乘客满意度 。
智能交通控制中心
中心功能
负责整个智能交通系统的管理和 控制,包括交通信号灯、监控摄
像头、应急管理等。
中心设备
配备先进的硬件设备和软件系统, 实现高效的数据处理和决策支持。
中心人员
专业的技术人员和管理人员,负责 系统的日常维护和运营管理。
人工智能在智慧交通中的应用案例
人工智能在智慧交通中的应用案例人工智能(Artificial Intelligence,简称AI)作为一种高级的信息技术,正在各行各业广泛应用并取得了显著的成效。
在智慧交通领域,人工智能也展现出其独特的优势和潜力。
本文将介绍几个人工智能在智慧交通中的应用案例,以展示其在该领域的推动作用和应用前景。
案例一:智能交通信号灯控制系统传统的交通信号灯控制系统往往依据固定的定时方案进行信号灯的控制,无法根据实际交通流量变化进行自适应调整。
而基于人工智能的智能交通信号灯控制系统能够通过感知设备和数据采集技术获取路况信息,结合深度学习算法进行实时统计和分析,从而优化信号灯的时序安排。
这一技术在减少交通拥堵、提高交通流畅度方面具有显著的效果。
案例二:智能驾驶辅助系统智能驾驶辅助系统是一种基于人工智能的安全驾驶辅助设备,通过感知技术、计算机视觉和深度学习算法等实现对驾驶环境的感知和判断。
例如,智能驾驶辅助系统可以通过摄像头和传感器实时监测驾驶员的状态和行为,发现疲劳驾驶、分神驾驶等危险行为,并进行及时提醒或干预,从而减少交通事故的发生。
案例三:智能交通管制中心智能交通管制中心是利用人工智能技术对城市交通运行状况进行实时感知、分析和监控的智能化管理平台。
通过集成多种交通数据源、视频监控系统和人工智能算法,智能交通管制中心能够对城市交通进行全面、准确的评估,及时发现交通状况异常,并实施相应的交通管制和调度,以提高交通运行效率。
案例四:智能交通安检系统智能交通安检系统是一种基于人工智能技术的车辆安检设备,通过摄像头和图像识别算法实现对过往车辆的自动检测和识别。
例如,智能交通安检系统可以对车辆进行车牌识别、颜色识别、形状识别等,有效辅助交通警察实施交通违法查处和犯罪嫌疑车辆追踪等工作,提高交通安全管理效能。
综上所述,人工智能在智慧交通中的应用案例涉及交通信号灯控制、驾驶辅助、交通管制中心以及交通安检等多个方面,通过深度学习、计算机视觉和感知技术等手段,实现了交通运行的智能化、自适应化和安全化。
(完整版)智能交通.ppt

25
4
③ 先进公共运输系统
包括车辆定位、客运量自动检测、行驶信息服务、 自动调度、电子车票、需求响应等系统;如利用 GPS和移动通信网对公共车辆进行定位监控和调 度、采用IC卡进行客运量检测和公交出行收费等。
检测出行进速度,陀螺 传感器检测出前进方向, 通过计算机直接算出前 进的距离。
GPS导航可用于飞机、 船舶、地面车辆及步行 者。
25
16
GPS导航示意图
25
17
交通综合管理信息平台
是一种信息化、智能化的新型交通系统,可整 合交通运输系统的信息资源,按一定标准规范完 成多源异构数据的接入、存储、处理、交换、分 发等功能,从而实现部门间信息共享、为制定交 通运输组织与控制方案、科学决策、以及面向公 众开展交通综合信息服务提供数据支持。
⑥ 自动化公路系统
是智能车辆控制系统和智能道路系统的集成,使
车辆自动与智能交通设施及周围车辆相互配合,
以控制车辆的速度、方向和车置,可以使司机更
轻松、更安全地驾驶车辆。在未来的高速公路上,
甚至可以实现车辆完全自动驾驶。
25
6
二、 城市智能交通控制与管理系统
城市交通控制系统是面向全市的交通数据监测、 交通信号灯控制与交通诱导的计算机控制系统,能 实现区域或整个城市交通监控系统的统一控制、协 调和管理,在结构上可分为一个指挥中心信息集成 平台以及交通管理自动化、信号控制、视频监控、 信息采集及传输和处理、GPS车辆定位等多个子 系统。
系统工程等技术综合运用于地面交通,建立起安全、 实时、准确、高效的地面运输系统; 实质是利用高新技术改造传统运输系统而形成的一 种信息化、自动化、智能化、社会化的新型运输系 统。
智能交通系统PPT课件

车辆:公共汽车、电车、出租车、货车、摩托车、 自行车、地铁、其它车辆。
路:快速干道、主干道、次干道、支路。 管理与控制系统:车辆检测器、计算机、交通信号
灯、路旁显示板、广播、闭路电视等。
2019/10/11
3
2019/10/11
2019/10/11
23
车流通过信号路口的时间-距离图
2019/10/11
24
四、信号控制的基本参数(续)
相位差: (Offset)
也称时差,是应用于信号系统联动协调控制的一个参数。有绝对 相位差和相对相位差之分。
绝对相位差是指各个信号的绿灯或红灯的起点或中点相对于某一 个标准信号(相位差为零)的绿灯或红灯的起点或中点的时间之 差。
(Limited (simple) progressive) 多方案续进协调控制系统(Flexible progressive)
2019/10/11
39
6.2 感应式线控系统和计算机线控系统
感应式线控系统
使用半感应信号机的线控系统 使用全感应信号机的线控系统 关键交叉口的感应式线控系统
“单位绿灯延长时间” (G0) 。即只要在这个预置的时间间隔内,车辆中 断,即换相;连续有车,则绿灯连续延长,直到绿灯一个预置的“极限 延长时间”(Gmax)时,即使检测到后面仍有来车,也中断这个相位的通车 权。
GminGGmax
2019/10/11
33
2019/10/11
34
5.3 定时控制和感应控制的选择
能降低延误和减少停车的控制方式,既有较好 的交通效益又有较高的经济效益。
不同交通条件下最有效的控制方式的分块图。 如图所示。
基于驾驶人决策机制的换道意图识别模型

基于驾驶人决策机制的换道意图识别模型倪捷;刘志强【摘要】According to the producing mechanism of driver's lane change decision, desired speed satisfaction, risk perception coefficient and change feasibility coefficient are put forward and quantified as the identification parameters of lane change decision. The results of analyzing real vehicle test data indicate that quantitative indicators have different correlation with lane change decision, and there is a significant difference among the beginning of lane changing, lane keeping and transition state stage. Fuzzy neural network model is established to identify driver's lane change intention by using desired speed satisfaction, risk perception coefficient and feasibility coefficient of lane change as the input feature index. The research results show that the model accuracy in the early stage of lane change is 89.93%, and the false alarm rate is 9.52%, which both are better than BP neural network model by taking the collision time TTC as input vectors and the Logistic model by using RV, RP and RS as variables. It shows that the model has a good predictive accuracy.%依据驾驶人换道决策的产生机制,提出速度期望满足度、危险感知系数和换道可行性系数作为换道决策的识别指标并确定其量化方法.通过实车试验数据的分析表明:量化指标与换道决策存在不同程度的相关性;同时在换道初期、车道保持及过渡状态阶段存在显著差异.以速度期望满足度、危险感知系数和换道可行性系数为特征输入参数,建立基于模糊神经网络的驾驶人换道意图识别模型,进行驾驶人换道意图的识别.结果表明,该模型在换道初期的预测准确率达到89.93%,虚警率为9.52%,优于以碰撞时间TTC为输入指标的BP神经网络模型,以及以RV、RP、RS为变量的Logistic模型,说明模型具有较好的预测准确性.【期刊名称】《交通运输系统工程与信息》【年(卷),期】2016(000)001【总页数】6页(P58-63)【关键词】智能交通;换道意图;决策机制;换道辅助系统;模糊神经网络【作者】倪捷;刘志强【作者单位】江苏大学汽车与交通工程学院,江苏镇江212013;江苏大学汽车与交通工程学院,江苏镇江212013【正文语种】中文【中图分类】U491.25随着车辆辅助驾驶系统的产生和智能车辆系统的研究,越来越多的人开始考虑使用各种车载辅助系统降低事故的潜在危险.换道辅助系统LAC就是通过判断驾驶人的换道意图,当环境感知模块判断当前环境不满足安全换道条件时,进行预警或自动干预驾驶人驾驶.然而,当系统发出与驾驶意图相异的预警时,会导致驾驶人分心并降低系统的可信度.因此,准确的换道意图识别成为提高换道辅助系统可靠性的关键技术之一.换道意图识别的研究通常有两个方面:一是驾驶人换道意图表征参数的提取;二是换道意图的识别算法.国内外在换道意图表征参量方面主要包含三类指标:驾驶人的眼动及头部特性参数[1]、车辆运行状态表征参数[2-3]和周围环境状态参数;在换道意图识别算法方面,hMM[2,4]、贝叶斯决策、神经网络[5]、支持向量机[6]等模式识别方法均有广泛应用.然而,上述研究中表征参数大多提取的是驾驶人换道时的外在表现,故在预测的精度和时序上会存在博弈.事实上,驾驶人换道决策的内在触发通常来源于周围车辆的行驶状态.鉴于此,本文通过换道决策机制的分析,考虑周围车辆行驶状态的影响,从换道意图的触发及可行性判断两方面设计换道决策识别表征参数,并构建基于模糊神经网络的驾驶人换道意图识别模型,为驾驶辅助系统的换道意图识别及智能车辆自主换道的决策设计提供依据.换道意图产生阶段的驾驶人行为决策是集驾驶人环境感知、分析判断和决策的综合认知过程,是“驾驶人-车辆-道路”三者交互的综合体现.仅考虑选择性换道的情况.在换道行为产生前,一般会有两种触发驾驶人换道意图的诱因:一是当前车道的平均车速或前导车车速无法满足驾驶人的速度期望;二是由于前导车临时制动等原因导致两车间距过近,驾驶人产生危险感知.为此,将此过程设定为第一次感知判断;产生换道意图后,驾驶人根据目标车道的后车距离,进行第二次感知判断,即可行性判断.当无法满足可行性要求时,车辆继续维持跟车状态;一旦满足可行性要求,驾驶人将根据本车的性能进行换道目标位置的规划并执行换道.驾驶人换道决策产生机制如图1所示.2.1换道决策指标设计与量化驾驶过程中影响驾驶人换道决策的信息主要来自本车道前车的驾驶条件、自车的运行状态及目标车道后方的驾驶条件三个方面.根据驾驶人换道决策机制的分析,将驾驶人产生换道需求的两种触发诱因定义为速度期望和空间危险感知,将目标车道可行性判断定义为换道可行性感知,设计换道决策量化方法.车辆换道时与周围车辆的位置关系如图2所示,SV代表自车,LV代表当前车道前方车辆,AFV代表目标车道后方车辆,ALV代表目标车道前方车辆.速度期望的触发工况通常以期望速度的满足度,即本车当前速度与期望速度的比值来表征.然而,驾驶人的期望速度由驾驶人的行为特性、道路等级、天气状况、车辆类型等因素共同决定,不同情形下的特征规律迥异,难以估算;同时,在实际行车过程中,影响驾驶期望最直接的因素是前导车的行驶车速,如果驾驶人认为当前车道前车速度过慢,驾驶人便会产生换道意图.因此,笔者提出以当前车道前导车的车速与目标车道车流的平均车速之比RV作为速度期望满足度的量化指标,如式(1)所示.式中:VLV为当前车道前导车的车速;Vdmean为目标车道的车流平均车速.在满足期望车速的状态下,驾驶人会与前导车保持安全车距.当原车道前车突然减速或有其他车辆切入自车前方,导致本车与前车的距离缩短,驾驶人会产生不安全感,进而会以避碰或满足期望空间为目的产生换道需求.而换道可行性的判断考虑的主要因素是与目标车道后车的安全距离.这两个因素实质上均属于驾驶人的空间感知,有两种具体的量化方法:(1)实际距离与临界安全距离的比值RS.式中:d为自车与目标车的纵向距离;dsafeness为自车与目标车的安全车距,计算公式为式中:Vo,Vd分别为后车与前车的初速度;τreaction为后车驾驶员的反应时间,一般为0.3~1.0 s;τlast为制动增长所经历的时间;aojmax,adjmax分别为后车与前车的最大减速度;L为停车后所要保持的距离,一般取5 m.(2)Nissan公司[7]提出的危险感知程度Rp.将车头时距ThW与碰撞时间倒数TTCi进行组合计算,构成危险感知系数,目前被广泛用于量化驾驶人对空间的危险感知程度.式中:ThW为车头时距,由相对距离除以后车速度获得;TTC为碰撞时间,由相对距离除以相对速度获得,TTCi表示TTC的倒数;A,b分别为参数线性加权的系数.2.2试验验证验证数据来源于快速路实车试验,试验设备包括带有横向加速度传感器和CAN总线的试验车、毫米波雷达等,数据结构包括自车的速度、加减速等运动信息及驾驶员操控数据、周围车辆的位置及交通状况数据.选取三种工况下的149组周围车辆数据进行参数有效性的计算和分析.三种工况包括:换道初期、车道保持、过渡状态.换道工况选择自由换道工况,换道开始时的数据,以保证得出驾驶人的正常换道行为特征;过渡状态工况是指驾驶人产生换道需求但由于目标车道后车速度过快或车距过近等原因等待换道时机的过程.表1给出了采用点二列相关分析两种空间感知参数与决策的相关性结果.可知,就本车道空间感知系数的量化方法,Rp的相关系数略高于RS,选择Rp作为本车道危险感知参量更为合适;对于目标车道的空间感知,RS的相关系数明显高于Rp,故选择RS作为换道可行性的表征参量.图3给出了换道初期和车道保持阶段量化参数的箱图.由图3(a)可知,换道阶段的速度期望系数均值小于车道保持阶段,且两阶段具有显著差异(sig=0.000<0.05),可以作为换道决策识别的指标之一;车道保持阶段的空间危险感知系数均值小于换道初期,同样存在显著的差异,如图3(b),可以作为换道决策识别的指标之一;图3(c)给出了换道可行性感知系数的箱图,由图可知换道初期和车道保持阶段的可行性系数均值接近,不具有显著差异;但过渡阶段的可行性感知系数与换道初期具有显著差异.模糊神经网络FNN采用Takagi-Sugeno模糊模型,网络结构如图4所示.网络输入量为速度期望满足度RV、危险感知参数Rp和换道可行性参数RS.神经网络为5层结构,分别是输入层、模糊化层、规则层、输出隶属函数层和输出层.速度期望满足度RV的模糊语言值有3个:S、C和F3条曲线;危险感知系数Rp 的模糊语言值有5个:VD、D、N、S、VS;换道可行性感知系数RS的模糊语言值有3个:D、N、S,共产生模糊规则45条.选择60组实车试验数据(车道保持与换道各30组)作为模糊神经网络的输入训练数据,选择15组数据作为检验样本.训练数据中,过渡工况为未实施换道的状态,将换道决策标定为车道保持.数据结构如表2所示.其中,3个输入量的训练前后的隶属度变化如图5所示.设定换道的输出值为1,车道保持的输出值为0,设切割阈值为0.5,当输出值≥0.5时,预测为换道,当输出值<0.5时,预测为车道保持.检验结果如图6所示.由图6可以看出,模糊神经网络的输出值与检验数据的实际值差异小,对决策结果的识别精度较高.将所有149组样本的数据代入训练好的模型,检验预测的准确性.从表3可知,总的预测准确率为89.93%.其中,预测特异度为90.48%,灵敏度为89.23%,虚警率为9.52%.为了比较模型的合理性,本文分别采用预警参数碰撞时间TTC1、TTC2作为输入参数的Bp神经网络预测模型和基于RV、Rp、RS三参数的Logistic模型对149组样本进行预测.Logistic模型的拟合公式见式(5),预测结果如表4所示.从预测结果及准确率可以看出,以RV、Rp、RS三参数作为输入的模糊神经网络模型优于其他两种方法.(1)分析了换道决策产生的机理,设计了换道决策的表征参量;采用实车试验数据,对空间危险感知和换道可行性感知的两种量化方法进行了相关性比较,对不同阶段的RV、Rp、RS进行了显著性检验.结果表明:对于本车道的空间危险感知,Rp的相关性高于RS;对于目标车道的换道可行性感知,RS的相关性高于Rp;换道初期和车道保持阶段的RV和Rp值存在显著差异,换道初期和过渡阶段的RS值存在显著差异.(2)建立了基于模糊神经网络的换道意图识别模型,给出了RV、Rp、RS三参数的隶属度函数,149组试验数据的识别结果显示,预测准确率达到89.93%,虚警率为9.52%;优于相同变量的logistic模型,以及以TTC为输入参数的Bp神经网络模型,验证了量化方法和识别模型的有效性.【相关文献】[1] Oliver N,pentland A p.Graphical models for driver behavior recognition in a SmartCar[C]// 2000 proceedings of the IEEE Intelligent Vehicles Symposium.2000:7-12.[2] Kuge,Yamamura T,Shimoyama O,et al.A driver behavior recognition method based on a driver model framework[J].SAE,2000-01-0349:1-8.[3] 彭金栓.基于视觉特性与车辆相对运动的驾驶人换道意图识别方法[D].西安:长安大学,2012. [pENG J S.Driver’s lane change intent identification based on visual characteristics and vehicles’relative movements[D].Xi'an:Chang’an University,2012.][4] Takuya MizushimA,pongsathorn Raksincharoensak, Masao Nagai.Directyaw-momentcontroladapted to driver behavior recognition[C]. SICE-ICASE International Joint Conference,2006:534-539.[5] 马勇,付锐,郭应时,等.基于实车试验的驾驶人换道行为多参数预测[J].长安大学学报(自然科学版),2014,34(5):101-108.[MA Y,FU R,GUO Y S,et al. Multi-parameterprediction of driver's lane change behavior based on real-world driving tests[J].Journal of Chang'an University(Natural Science Edition),2014,34 (5):101-108.][6] Van Leeuwen C J.Driver modeling and lane change maneuverprediction[D].Groningen: University of Groning,2010.[7] Kondoh T,Yamamura T,Kitazaki S,et al.Identification of visual cues and quantification of drivers'perception of proximity risk to the lead vehicle in car-followingsituations[J].Journal of Mechanical Systems for Transportation andLogistics,2008,1(2):170-180.。
智慧交通系统结构图ppt课件

智慧交通系统采用分布式、层次 化的通信网络架构,包括感知层
、网络层和应用层三个层次。
传输协议
在智慧交通系统中,常用的传输协 议包括TCP/IP、HTTP、MQTT等 ,这些协议保证了数据的可靠传输 和实时性。
网络安全
智慧交通系统需要保证网络安全, 采用防火墙、入侵检测等安全机制 ,确保数据传输和存储的安全。
网络层在智慧交通中应用案例
车路协同
智能信号控制
通过网络层实现车与车、车与路之间的实 时通信,提高道路通行效率和安全性。
通过网络层实现交通信号灯的远程控制, 根据实时交通情况进行信号灯配时方案的 调整,缓解交通拥堵。
智能公交调度
智慧停车
通过网络层实现公交车的实时定位和调度 ,提高公交车的运行效率和乘客的出行体 验。
该标准规范了智慧交通系统的建设目标、原则、架构、功能要求等方面 的内容,为智慧交通系统的规划、设计、建设和运营提供了全面的指导 。
《道路交通安全法规》
该法规规定了道路交通安全管理的基本原则、管理制度、安全设施等方 面的内容,为智慧交通系统的建设和应用提供了法律保障。
03
《智能交通信号控制技术规范》
该规范规定了智能交通信号控制技术的术语和定义、技术要求、试验方
持续改进方向
进一步完善智慧交通系统功能和性能 ,提升系统智能化水平;加强与其他 城市的智慧交通系统互联互通,实现 区域交通协同管理和优化。
THANKS感谢观看通过网络层实现停车场的远程管理和预约 服务,提高停车场的利用率和便利性。
04
应用层技术及应用
云计算平台搭建与部署策略
云计算平台架构
包括IaaS、PaaS、SaaS等层次,提 供计算、存储、网络等基础设施服务 。
自动驾驶高精地图如何建立
引言高精地图,国际一般称为高分辨率地图(high definition map,HD Map)或者高度自动驾驶地图(highly automated driving map,HAD Map),国内也称其为自动驾驶地图,是一种面向车辆高级辅助驾驶、自动驾驶及智慧交通的电子地图产品[1]。
与导航电子地图相比,高精地图具有更高的精度和更丰富的数据内容,通常包括道路[2]、车道[3-4]、道路上的地面标志物[5]以及交通控制信息[6]。
高精地图大约在2014年受到自动驾驶需求的驱动而产生,伴随着自动驾驶的快速发展而逐渐成为研究热点话题。
行车环境感知是实现自动驾驶的前提,自动驾驶系统首先需要感知车辆周边的道路交通环境,然后才能规划行车路径,最后通过控制执行实现自动驾驶[7]。
因此,智能网联汽车一般安装了各种传感器来实现行车场景环境感知,例如摄像头、GNSS、INS、毫米波雷达、超声波雷达和激光雷达等。
但仅依靠传感器还无法实现完整可靠的环境感知,因为传感器自身存在诸多限制。
例如传感器的感知范围有限,一般在200 m以内,同时也无法感知位于其视场角(FOV)之外的物体。
此外,传感器容易受到恶劣天气和环境噪声的影响而无法正常工作,并且需要高性能的计算、耗电多。
高精地图可以作为一种行车基础设施提供全天候超视距的感知,解决传感器感知边界和使用条件受限的问题,增强自动驾驶系统的稳健性。
除了应用到环境感知,高精地图还被大量应用到高精度定位和路径规划[8-13]。
尽管很多自动驾驶公司已经开始使用高精地图,但大多采用的是自有格式或者扩展现有格式,只能满足该公司或者特定项目需要,不具备通用性和大规模应用能力[14]。
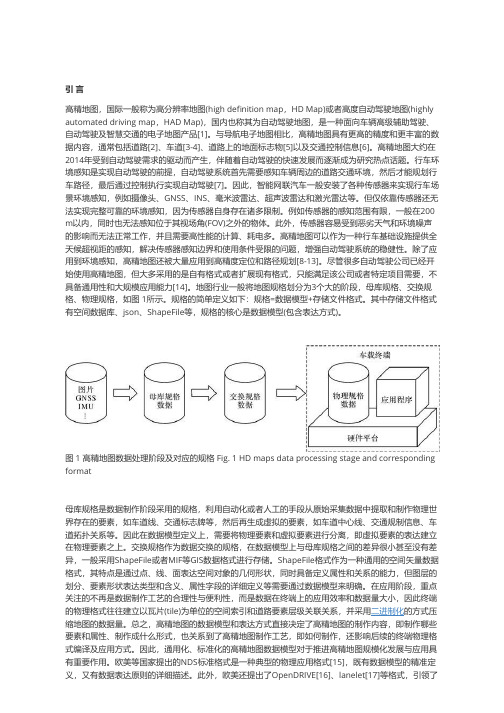
地图行业一般将地图规格划分为3个大的阶段,母库规格、交换规格、物理规格,如图 1所示。
规格的简单定义如下:规格=数据模型+存储文件格式。
其中存储文件格式有空间数据库、json、ShapeFile等,规格的核心是数据模型(包含表达方式)。
智能交通:智能交通管理系统与交通数据分析培训ppt

自动驾驶汽车的发展趋势与挑战
自动驾驶汽车技术不断发展,未 来将实现更高级别的自动化和智
能化。
自动驾驶汽车面临技术、法律和 伦理等多方面的挑战,需要解决
安全、隐私和道德等问题。
自动驾驶汽车将改变人们的出行 方式和城市交通结构,对城市规 划和基础设施建设提出新的要求
。
基于大数据和人工智能的智能交通系统优化
提高出行便利性
为乘客提供更加便捷、舒适的 出行体验,如实时路况查询、
智能导航等。
智能交通的发展历程与趋势
发展历程
从最初的交通信号灯控制系统到现在的智能交通系统,经历了多个阶段的发展。
发展趋势
随着物联网、云计算、大数据等技术的不断发展,智能交通将向更加智能化、高效化、安全化的方向发展。未来 将实现更加全面的交通信息共享和协同管理,提高道路交通的整体效率和服务水平。同时,随着自动驾驶技术的 逐步成熟,智能交通系统将与自动驾驶技术相互融合,共同推动交通行业的变革和发展。
节能减排实践案例
总结词
智能交通管理系统能够降低车辆能耗和排放。
详细描述
智能交通管理系统通过优化车辆行驶路线和速度、减少无 效停车和行驶等措施,降低车辆能耗和排放,从而达到节 能减排的效果。同时,智能交通管理系统还能够为政府和 企业提供准确的碳排放数据和监测报告。
总结词
智能交通管理系统能够促进新能源汽车的推广和应用。
智能交通管理系统能够提高公共交通运行效率。
详细描述
智能交通管理系统通过实时监测公共交通车辆位置、到站 时间等信息,为乘客提供准确的出行信息,优化公共交通 线路和班次安排,提高公共交通运行效率,减少乘客等待 时间。
总结词
智能交通管理系统能够提高城市物流效率。
智能交通PPT课件

contents
目录
• 智能交通概述 • 先进技术应用 • 城市规划与建设策略 • 智慧出行服务创新 • 自动驾驶技术前沿动态 • 车路协同系统设计与实现 • 总结与展望
01 智能交通概述
定义与发展历程
定义
智能交通系统(Intelligent Transportation System, ITS)是将先进的信息技术、数据通讯传输技术、电子传感 技术、控制技术及计算机技术等有效地集成运用于整个地面交通管理系统而建立的一种在大范围内、全方位发挥 作用的,实时、准确、高效的综合交通运输管理系统。
紧急救援
在发生交通事故或紧急情况时 ,车路协同系统可快速定位并 通知救援机构,提高救援效率
。
车路协同系统挑战与未来发展
技术挑战
包括传感器精度和稳定性、通信延迟和数据安全等问题。
政策与法规挑战
需要制定和完善相关法规和标准,推动车路协同系统的合 法合规应用。
市场与应用挑战
需要探索更多商业模式和应用场景,推动车路协同系统的 普及和应用。
自动驾驶技术
随着自动驾驶技术的不断成熟,未来智能交通将实现更高级别的 自动驾驶,提高交通运行效率和安全性。
数据安全与隐私保护
随着智能交通系统数据量的不断增长,数据安全和隐私保护将成 为未来发展的重要挑战。
创新驱动,共筑美好未来
加强科技创新
鼓励企业、科研机构加 强智能交通领域的科技 创新,推动新技术、新 模式的不断涌现和应用 。
《道路交通安全法规》
规范道路交通行为,保障道路交通安全和畅通。
3
《新能源汽车产业发展规划》
推动新能源汽车在城市交通领域的应用和推广, 促进城市交通绿色化发展。
智能交通ppt模板

Transportation
最佳出 行路线
路况信 息
交通事故 数据
智能停 车管理
04.
智慧交通系统的安 全与隐私保护
信息安全威胁分析
数据泄露风险高。 根据《全球数据泄露调查报告》,近70%的企业经历过至少一次数据泄 露事件,其中交通行业的数据泄露事件占比达到25%,显示出智慧交通 系统在信息安全方面面临严峻挑战。 系统漏洞易被利用。 据赛门铁克公司的报告,智慧交通系统的漏洞利用事件在过去两年里 增长了300%,这表明黑客可以利用这些系统漏洞对智慧交通系统进行 攻击,造成严重的后果。
03.
智慧交通系统的关 键技术与应用
物联网技术在智慧交通中的应用
物联网技术
Internet of Things Technology
资源配置优化
Resource allocation optimization
智慧交通系统
Intelligent transportation system
交通流量预测准确率
智慧交通系统的信息架构设计
《智慧交通系统的信息架构设计》:构建高效便捷,安全智能的现代交通信息体系。
03. 04. 05. 06.
智慧交通系统的关键技术与应用
《智慧交通系统的关键技术与应用》:探索现代交通管理中的科技创新与实践应用,引领 未来智慧城市发展。
智慧交通系统的安全与隐私保护
《智慧交通系统的安全与隐私保护》探讨了在构建高效、便捷的交通网络时,如何平衡技 术创新与用户隐私权益的重要性。
智慧交通标准体系建设与实践
智能交通系统信息架构 智慧交通系统的信息架构应以数据为基础,构建统一、高效的信息平 台,实现信息的实时传输和共享。 智慧交通标准体系建设 智慧交通需要建立一套完整的技术标准体系,包括硬件设备、软件系 统、数据传输等多个方面,以保证系统的稳定运行和升级维护。 实践智慧交通系统 通过实际应用智慧交通系统,可以提高交通效率,减少交通事故,提 升公众的出行体验。
智能交通简介
公共交通服务
智能公交调度
实时监测公交车辆的位置和运行 状态,优化公交车辆的调度方案 ,提高公共交通的准点率和舒适
度。
电子站牌与查询
为乘客提供实时的公交线路、车辆 到站时间等信息,方便乘客出行。
定制化公交服务
根据乘客需求,提供定制化的公交 服务,如学生专线、通勤专线等。
智能驾驶汽车
自动驾驶技术
通过传感器、雷达等设备,实现车辆的自主驾驶,提高行车安全 性。
通信技术
车联网通信
通过车载设备之间的无线通信,实现 车辆之间的信息共享和协同驾驶,提 高道路安全性和交通效率。
5G通信
利用5G高速、低延迟的通信特性,实 现车与车、车与基础设施、车与云端 之间的实时通信,为智能交通提供更 高效、更可靠的通信支持。
控制技术
智能信号控制
通过实时监测交通流量和路况信 息,智能调整交通信号灯的配时 方案,优化交通流,提高道路通 行效率。
现状
目前,全球范围内的许多国家和地区都在积极推广和应用智 能交通系统,取得了一定的成效。同时,随着技术的不断进 步和应用场景的不断扩展,智能交通系统的功能和应用范围 也在不断拓展。
智能交通的重要性
提高交通运行效率
保障交通安全
通过智能调度和优化交通信号控制,减少 交通拥堵和延误,提高道路通行能力和公 共交通运行效率。
特点
智能交通系统具有实时性、高效性、安全性、舒适性和环保性等特点,能够实 现交通信息的实时共享、车辆的智能调度、交通信号的智能控制、公共交通的 智能化管理等功能。
发展历程与现状
发展历程
智能交通系统的发展经历了多个阶段,从早期的交通信息采 集和发布,到后来的车辆导航和智能调度,再到现在的全面 智能化管理和控制。
智能交通 ppt课件

智能公路是智能交通的最高形式和最终归宿,代表着未 来公路交通的发展方向,前景是美好的,但同时也是技 术难度最大、涉及面最广、最具挑战性的领域; 发展智能公路的基本思路是以道路基础设施智能化为核 心,以公路智能与车载智能的协调合作为基础,重视人 的因素,促进人、车、路三位一体协调发展。
25
ppt课件
ppt课件 5
25
⑤ 先进车辆控制和安全系统
包括事故规避、监测调控等系统,使车辆具有道 路障碍自动识别、自动报警、自动转向、自动制 动、自动保持安全车距和车速等功能;可向驾驶 员提供车体周围的必要信息,可发出预警,并可 自动采取措施来防止事故的发生。 ⑥ 自动化公路系统
⑦ 是智能车辆控制系统和智能道路系统的集成, 使车辆自动与智能交通设施及周围车辆相互配合, 以控制车辆的速度、方向和车置,可以使司机更 轻松、更安全地驾驶车辆。在未来的高速公路上, 甚至可以实现车辆完全自动驾驶。
25 ppt课件 15
GPS导航系统
由接收机接收卫星信号,可得到该点的经纬度 坐标、速度、时间等信息,当汽车捕捉不到卫星信 号时,系统可自动转换为自律导航,由车速传感器 检测出行进速度,陀螺 传感器检测出前进方向, 通过计算机直接算出前 进的距离。 GPS导航可用于飞机、 船舶、地面车辆及步行 者。
国内首个工程化实施的大城市道路交通信息集 成和智能化应用系统是上海市2007年完成的“城 市道路交通信息智能化系统及平台软件” 项目。
25 ppt课件 18
上海的城市道路交通信息智能化系统
25
ppt课件
19
广州智能交通指挥控制中心
25
ppt课件
20
25
ppt课件
交通监控界面
智能交通PPT课件

服务器发送请求给这些车辆,请求车辆司机拍摄道路图片
车辆上传拍摄图片,获取最高的图片返回给用户
第15页/共41页
15
大纲
系统动机
系统简介
系统模型
实验与仿真
结论
第16页/共41页
16
系统模型
按照不同目的和功能,系统可以分为以下三个步骤: ➢ 车辆选择:服务器预测车辆行为,并跟踪车辆,
剩余的都会到达请求地点!!!
第27页/共41页
27
系统模型
报酬计算
➢ 原因:车辆司机不会主动上传照片给陌生人,需 要报酬
➢ 工具:反向VCG拍卖
计算图片价值
计算车辆效用
第28页/共41页
28
系统模型
报酬计算:
计算服务器效用 最大化社会效用 最后计算图片报酬
第29页/共41页
29
系统模型
图片处理
➢ 即使找到车辆,为什么这些车辆会上传拍摄照 片
➢ 如果上传的照片不是在用户请求点拍摄的怎么 办
方案:预测并跟踪测量,设计激励机制,图像匹配
第13页/共41页
13
系统架构图
系统简介
第14页/共41页
14
工作流程:
系统简介
用户生成请求,并发送请求给服务器
服务器预测车辆的行为,并跟踪车辆以获得会经过请求点的车辆列表
ETSI和CEN确认
1973-1978年:组织“动态路径诱导系统”的实验
80-90年代:完成了智能交通系统各方面的研究
1994-2000年:完成了智能交通系统测试和整体设想
1994年:将IVHS改为ITS
2004年:开发智能公路Smartway项目
2010:新一代智能交通车载装置投入市场