大吨位起重机起升机构电气系统设计
DBQ系列塔式起重机主起升机构电气控制系统改造

达不 到 工 程安 装 要 求 的低 速 物在 涡 流制动 器 的制动 力矩 和 电动 机 切 出一 段 或 两 速 度 比原 设 计速 度 大 ,
段 电阻后 的电磁 力 矩 的共 同作 用 下 , 速 上 升 ; 、 就 位功 能 。尤其 危 险 的是 , 降 一 档 时 , 失 去 涡 流 慢 三 下 在 四档 电动 机逐级 切 出全部 电阻 以额 定 速 度运 行 。下 制 动器 的制 动力 后 , 有 吊物 的重力 起 作 用 , 法达 仅 无
调速 系 统 的 一个 关 键 部 件 损 坏后 , 仍 继续 使 用 将 运行 。 若
会产生 严重 的安 全 隐患 。
从 上述工 作 原理来 看 , 流 制动 器 损 坏后 , 论 涡 无
现 根据该 系 列塔 机 的起 升 控 制 系统 原理 进 行 分 上升 一 、 档 , 二 还是 下降 二 、 三档 , 起 升 机 构运 行 的 在
少 析 。该 系列塔 机 的起 升 控 制 系统 原 理 如 图 1所 示 , 合 成 力 矩 中 , 了一 个 起 减 速 作 用 的 涡流 制 动 器 的 上升 设 四档操 作 , 、 档 涡 流 制 动 器 投 入 , 时 吊 一 二 此 制 动 力 矩 , 成 起 升 机 构 在 这 些 档位 稳 定 运 行 时 的 造
计 的起 重 机 , 泛用 于 我 国 的火 电建 设 工 地 的锅 炉 到力 矩 平 衡 , 而 使 起 升 机 构 以稳 和厂 房 吊装 作业 , 我 国的 电力 建 设 做 出 了巨 降 , 现工 程安 装要求 的低 速就 位功 能 , 载 或 中载 为 实 轻 大贡 献 。该 系 列 塔 机 自投 入 使 用 以 来 , 多 数 已运 时 , 大 由于重力不能克服涡流制动器的制动力 , 不能启 行 2 年 , 电 气控 制 系统 多 已老 化 , 0多 其 由于 工 程 量 动 。下 降二 、 档 主 要 用 于 轻 载 、 载 低速 运 行 , 三 中 满 较大 , 多 用户疏 于对 设备 的改 造和 维 护 , 成很 多 足工 程安 装要 求 的低速 就 位 功 能 。下 降二 、 档 时 , 很 造 三 设 备带 病作 业 , 在着 严重 的安全 隐患 , 重影 响 了 涡流 制动 器投 入 , 存 严 同时 电动 机切 出一 段 或两 段 电阻 , 施工 的安 全进 行 。该 系列塔 机 的起 升 机 构控 制 系统 此 时 , 物 的重 力 加 上 电动 机 切 出一 段 或 两 段 电阻 吊 大 多 采用 涡 流制 动 器 调 速 方案 , 用 电动 机 的 电磁 时 的电动力 克 服涡 流制 动器 的制 动力 , 速 启 动 ; 利 加 稳
探析起重机电气控制系统
探析起重机电气控制系统内蒙古赤峰 024000摘要:起重机电气控制系统当中,非常重要的一项内容是安全与可靠。
因为起重机的机构之间存在着相对复杂的工况,促使控制系统线路变得更为复杂化,不利于调试工作的积极开展,也不利于维护与维修工作的顺利实施。
从传统故障当中发现,当起重机电气控制系统发生故障的时候,需要立即采取停机操作,并且要由专业工作人员,详细排查复杂的电气控制系统中存在的故障。
关键词:起重机;电气控制系统如今我国运输业的快速发展,起重机在运输装卸过程工作中广泛应用。
而起重机的运作离不开各种电气设备的支持,但电气故障的出现对起重机的运作效率和安全性都带来了不利影响。
对此文章围绕起重机电气设备危害因素的影响进行分析,就危害因素的应对提出了系统优化设计的相关问题分析,并探讨电气设备危害因素的预防策略。
1起重机控制系统的发展趋势信息科学技术的发展促进起重机控制向信息化、智能化的方向发展。
在现代信息科学技术中愈来愈多地采用了语音识别技术、图像识别与处理技术、传感控制技术等智能控制技术,并引入专家控制、模糊控制等先进的控制理论。
近年来智能技术的研究持续开展并且取得了较大的进步,随着认知科学与电子信息技术的发展,人工智能技术在各行业将会愈来愈多地得到应用。
同时,智能技术的发展也将促进起重机自动化水平的提高,对我国工业化的发展起到积极的促进作用。
2起重机电气控制系统的设计思路2.1可靠性设计对于产品的预期安全和失效状态进行预估,这是保障可靠性设计能够顺利进行的关键点,也是针对性提升产品可靠性的核心环节。
配置产品系统子集的冗余设计指标,比如元器件、组件和执行单元等,是在起重机电气控制系统冗余设计初期需要开展的关键工作,起重机电气控制系统投入运行后的工作状态,应该通过分析其功能、元器件、使用环境和多因素之间的相互关系进行预估。
为了能够对起重机电气控制系统在实际工作环境下的工作状态、工作能力和寿命进行预测,需要建立力学模型与数学模型,并在故障数据统计分析和试验的帮助下,完成起重机电气控制系统的冗余设计。
桥式起重机设计--起升机构

起升机构设计说明书设计内容计算与说明结果1)确定起升机构传动方案,选择滑轮组和吊钩组设计参数:(1)起重量:主钩10t(2)跨度:L=22m(3)最大起升高度: H=16m(4)起升速度V=7.6m/min小车运行速度V=46m/min大车运行速度V=76m/min(5)工作级别A4(6)JC值:251.起升机构计算按照布置宜紧凑的原则,决定采用如下图5-1的方案。
按Q=10t,查[1]表4-2取滑轮组倍率m=4,承载绳分支数:Z=2m=8图5-1 起升机构计算简图查起重机设计手册附表9选长型吊钩组,图号为图3-4-22(b)。
得其质量:G0=697kg两端滑轮间距 A=376mm并根据工作级别和起重量从表3-4-2中选择吊钩m=4Z=8选长型吊钩组,图号为图3-4-22(b)2)选择钢丝绳3)确定滑轮及滑轮组主要尺寸LM20-M,材料为DG20。
若滑轮组采用滚动轴承,当m=4,查[1]表2-1得滑轮组效率ηh=0.982.钢丝绳的选择钢丝绳所受最大拉力:S max =Qg/2mηh=98.042.8925000⨯⨯⨯=31.25KN按选择系数C确定钢丝绳直径d(mm)机构工作级别M5,取w=0.46,k=0.82,n=5,bσ=1550MP a则有C=0.1d=C Smax=0.1×31250=18.38mm查起重机设计手册选用纤维芯钢丝绳6w(19)-22.5-1550-I-光-SZ GB 1102-74,钢丝公称抗拉强度1550MP a,光面钢丝,左右互捻,直径d=22.5mm,钢丝绳最小破断拉力[S b]=328KN,标记如下:钢丝绳 6w(19)-22.5-1550-I-光-SZ GB 1102-743.滑轮组的选择3.1滑轮的许用最小直径:D≥ed⨯=5.2220⨯=450mm式中系数e=20由起重机设计手册表3-2-1查得。
由[1]附表2选用滑轮直径D=600mm。
滑轮的绳槽部分尺寸可由[1]附表3查得。
30T桥式起重机起升机构设计

30T桥式起重机起升机构设计
一、起升机构方案的选择
起升机构一般由驱动装置(包括电动机、联轴器、制动器、减速器、卷筒等)、钢丝绳卷绕装置(包括钢丝绳、卷筒、定滑轮和动滑轮)、取物装置和安全保护装置组成。
电动机驱动是起升机构的主要驱动方式。
当起重量在50t以下时,常见的桥式起重机的起升机构布置方式如图1所示;
1-电动机;2-联轴器;3-传动轴;4-制动器;5-减速器;6-卷筒;
7-轴承座;8-平滑滑轮;9-钢丝绳;10-滑轮组;11-吊钩
图1起升机构配置方案
当起重量在20-30t时,常见的起升机构钢丝绳卷绕如图2所示。
采用双联滑轮组,滑轮组倍率m=4。
图2 钢丝绳卷绕示意图
二、根据已给定的起升机构方案,结构所学知识,具体应完成的任务如下:
1.起升机构方案的选择
2.起升机构设计计算
1)钢丝绳、滑轮和卷筒直径的确定
2 )吊钩滑轮组的选择和验算(包括吊钩的选择、吊钩螺母、止推轴承、吊钩横梁、滑轮及滑轮轴承的计算与选择)
3)卷筒的计算与选择
4)电动机的确定与校核
5)减速器的选用
6)制动器的选择
7)联轴器的选择
8)起动时间和制动时间验算。
大型铸造起重机主起升机构原理设计

(上接第 2页 )
5 结 论
在进行 上述计算时 ,预应力系数 z3、预应力 Pl 和 箱 体变 形 量 入之 间是相 互关 联而 又相互 制 约 的 ,合 理 的预应力 系数 ,应该 是即满足剪切 要求 , 在剪切 力作用下 ,满足强度条件 和良好 的刚性 ,即 强度 和刚度两方面的要求 ,同时又不至于使箱体 和拉杆过于笨重。性价比最高是选择 的 目标。
K13K23投入使用 ,图 2中①③线路 接通 ,②④线 路断开 ,Kll,K21线圈不得 电。
(2)如果 K12K22接触器 出现故 障 ,其 接触器 上端 的隔 离开 关 Q12及 下端 的 Q22断 开 ,控 制 回 路原理与上述情况相反 ,②④线路接通 ,①③线路 断开 。其控制 回路上的改进 ,不影响单 电机工作 的 情况 ,单双 电动机工作情况与正常接触器单双 电 动机工作情况相 同。
电 动 机参 数 如 下 :
踟恸 。
图 1 主起升机构 动力回路原理框 图
2.1.2 控 制 回路 控制 回路在 QR2S基础上改进 ,增加备用接触
器部 分 (线 路①② ③④ ),控 制 回路利用 电气元件
之间的逻辑 实现控制 ,控制 回路接 触器部分框 图 见 图 2。
一 8 一
摘 要 :介绍 了某钢厂 200t铸造起重机 主起升机构增 加备 用换 向接 触器的线路 分析 。 关键 词:铸造 起重机 ;主起升 ;换 向接触器
1 前 言
我公 司为某钢厂设计的 200t铸造 起重机 ,主 起升 机构采用转子切电阻两档反接下降可直接转 上身 方案(QR2S),用户要求主起升机构 备用 一套 接触器控制 电动机正反转运行 ,同时控制 回路留 好接 口,能在短时间内投入运行。该起重机 主起升 选用两 台电动机 ,可采用一套换 向接触器带两台 电动机 ,但 由于该 起重机吨位大 ,所选电动机功率 大 ,大容量 的换 向接触器不仅价格昂贵 ,且频繁动 作 ,故 障率高 ,所以主起升机构采用每台 电动机上 端单 独配有一套换 向接触器 ,同时为了节约成本 , 只备用一套换 向接触器 ,无论哪套出现故障 ,备用 接 触器 都 能 短时 间内快速投入 使用 ,文 章就该 200t铸 造起 重机主起升机构系统设计与运行方案 做 进 一 步 分 析 。
起重机电气设计规范(精)

能,当调速装置或正反向接触器故障导致电 动机失控时,制动器应立即抱闸 。为确保制 动器抱闸,制动接触器辅助触点应反馈至控 制系统,确认制动接触器可靠分断,否则断 开总接触器。
三、控制系统
电气控制部分在修订时,其内容包括了原
GB3811-1983,FEM相关部分的内容,同时 增加了变频调速和调压调速的说明。(对吊钩 起重机,当起升机构的工作级别为M4、M5 和M6,且额定起升速度≥5m/min时要求制动 平稳,应采用电气制动方法,保证在0.2~ 1.0G范围内下降时,制动前的电动机转速降至 同步转速的1/3以下,该速度应能稳定运行.)
3)调压调速系统在任何速度上的允许运行时 间相对于电阻器的发热时间常数来讲,均为 长期。故电阻元件的接电持续率应按100%选 用。但由于上升和下降时,机械传动效率相 反,电动机的工作电流不等,所以电阻元件 在JC=100%下的电流值为: I上= IN; I下= IN×η2。
变频调速系统
系统特点: 1)变频调速系统可实现额定频率以下恒转矩调速及 额定频率以上恒功率调速,弱磁升速范围取决于 电机允许的最高运行转速及在最高转速下输出的 转矩能否满足负载的加速要求。 2)动态特性较硬,即:动态速降小,因此适用于起 升及运行机构。运行采用变频调速较采用调压调 速系统其速度稳定性更好。 3)变频调速采用开环还是闭环控制,对于在起重机 上的应用来讲最大的差别在于闭环控制起动转矩 更大,低速运行更平稳,调速范围更宽。 一般起升采用闭环控制,运行采用开环控制。
注:M5及以下K值可选1是因为太小的K值会在负荷试 车的静载试验时,机构不能起吊1.25倍额定载荷。
3)电动机在不同工作制下功率值的折算 将S1工作制下的电动机功率值折算到 S3 JC =40%或S3 JC =60%下的电动机功率值可 参考下式折算: P40≈1.15~1.2 PS1 P60≈1.05~1.1 PS1 对于不同的电动机,其折算系数略有不同,若需 知道准确折算值,需向制造商索取
起重机设计规范电气部分

四、电机选择
在进行电动机容量选择时, 在进行电动机容量选择时,必须对电动机的过载和 发热能力进行计算与校验。 发热能力进行计算与校验。所选电动机应同时满足 过载和发热的功率计算值。 过载和发热的功率计算值。以二者计算值的较大值 为准,作为选择电动机的计算依据。 为准,作为选择电动机的计算依据。在考虑工作环 境条件等影响因素后,最终选取电动机。 境条件等影响因素后,最终选取电动机。具体方法 见附录P电动机的初选 附录R电动机的过载校验和 电动机的初选、 见附录 电动机的初选、附录 电动机的过载校验和 附录S电动机的发热校验。 附录 电动机的发热校验。 电动机的发热校验
附录P:电机初选
起升电动机初选: 起升电动机初选: 1).计算稳态起升功率:PN=PQ×Vq/1000/η 计算稳态起升功率: 计算稳态起升功率 2).计算 、JC=40%基准工作制下所需的电动机 计算S3、 计算 基准工作制下所需的电动机 功率: 功率:Pn≥K PN 式中: 作业频繁系数, 式中:K——作业频繁系数,与机构工作级别对 作业频繁系数 见表1; 应,见表 ; Pn——S3、JC=40%下电动机额定功率。 下电动机额定功率。 、 下电动机额定功率
电气控制部分在修订时, 电气控制部分在修订时,其内容包括了原 GB3811-1983,FEM相关部分的内容,同时 相关部分的内容, , 相关部分的内容 增加了变频调速和调压调速的说明。 对吊钩 增加了变频调速和调压调速的说明。(对吊钩 起重机,当起升机构的工作级别为M4、 起重机,当起升机构的工作级别为 、M5 和M6,且额定起升速度 ,且额定起升速度≥5m/min时要求制动 时要求制动 平稳,应采用电气制动方法,保证在0.2~ 平稳,应采用电气制动方法,保证在 ~ 1.0G范围内下降时 制动前的电动机转速降至 范围内下降时,制动前的电动机转速降至 范围内下降时 同步转速的1/3以下 该速度应能稳定运行.) 以下,该速度应能稳定运行 同步转速的 以下 该速度应能稳定运行
起重机起升机构的组成及安全设计计算

起重机起升机构的组成及安全设计计算1.起升机构组成起升机机构由驱动装置、传动装置、卷绕系统、取物装置、制动器及其他安全装置等组成,不同种类的起重机需配备不同的取物装置,其驱动装置亦有不同,但布置方式基本上相同。
典型起升机构平面布置见图8-1。
图8-1 起升机构传动简图1-电动机 2-联轴器 3-制动器 4-减速器 5-联轴器 6-卷筒7-钢丝绳 8-吊钩滑轮组 9-上升极限位置限制器起重量超过10t时,常设两个起升机构:主起升机构(大起重量)与副起升机构(小起重量)。
一般情况下两个机构可分别工作,特殊情况下也可协同工作。
副钩起重量一般取主钩起重量的20%--30%;(1)驱动装置。
大多数起重机采用电动机驱动,布置、安装和检修都很方便。
流动式起重机(如汽车起重机、轮胎起重机等)以内燃机为原动力,传动与操纵系统比较复杂。
(2)传动装置。
包括减速器、联轴器和传动轴。
减速器常用封闭式的卧式标准两级或三级圆柱齿轮减速器,起重量较大者有时增加一对开式齿轮以获得低速大力矩。
为补偿吊载后小车架的弹性变形给机构工作可靠性带来的影响,通常采用有补偿性能的弹性柱销联轴器或齿轮联轴器,有些起升机构还采用浮动轴(也称补偿轴)来提高补偿能力、方便布置并降低磨损。
(3)卷绕系统。
它指的是卷筒和钢丝绳滑轮组。
桥架类型起重机采用双联滑轮组,单联滑轮组一般用于臂架类型起重机。
(4)取物装置。
它是根据被吊物料的种类、形态不同,采用不同种类的取物装置。
取物装置种类繁多,使用量最大的是吊钩。
(5)制动器及安全装置。
制动器既是机构工作的控制装置,又是安全装置,因此是安全检查的重点。
起升机构的制动器必须是常闭式的。
电动机驱动的起重机常用块式制动器,流动式起重机采用带式制动器,近几年采用了盘式制动器。
一般起重机的起升机构只装配一个制动器,通常装在高速轴上(也有装在与卷筒相连的低速轴上);吊运炽热金属或其他危险品,以及发生事故可能造成重大危险或损失的起升机构,每套独立的驱动装置都要装设两套支持制动器。
起重机起升机构计算
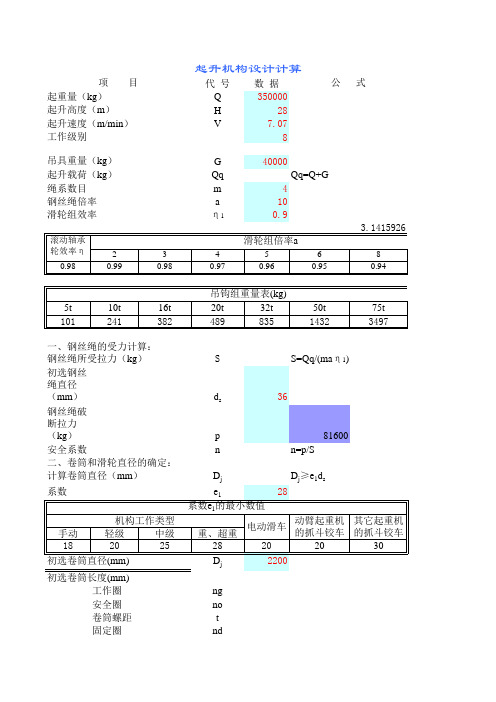
代 号数 据Q 350000H 28V7.078G 40000Qq m 4a 10η10.9S初选钢丝绳直径(mm )d s36钢丝绳破断拉力(kg )p81600安全系数n n=p/S D 工作圈ng 安全圈no 卷筒螺距t 固定圈nd起升机构设计计算项 目公 式起重量(kg )起升高度(m )起升速度(m/min )工作级别吊具重量(kg )起升载荷(kg )Qq=Q+G 绳系数目钢丝绳倍率滑轮组效率一、钢丝绳的受力计算:钢丝绳所受拉力(kg )S=Qq/(ma η1)二、卷筒和滑轮直径的确定:计算卷筒直径(mm )D ≥e d工作长度Lo 固定长度L2中间空白L3两端空白L1卷筒总长LDh1000M js η20.99单层双层折返双层同向n js M j η0.85N j N e 132n 588t q GD 22401020M p q M 40e N 40e 75n 700M q max计算滑轮直径(mm)D h ≥e 1d s初选滑轮直径(mm)注:平衡滑轮直径允许取为动滑轮直径 的0.6倍,推荐取其直径相等。
三、起升机构传动构件的扭矩与转速计算:1.卷筒轴上的扭矩(kg.m )M js =SD js m/(2η2)卷筒效率(相当于一个滑轮)根据不同缠绕方式所确定的计算直径(m)D js0.624D js =D j +d sD js =D j +2.73d sD js =D j +1.87d s2.卷筒轴转速(rpm)n js =n/i3.电机轴上的静力矩(kg.m)M j =M js /(i η)起升机构的效率四、电机的选择:1.按静功率初选电机电动机静功率(kW)N j =Q q v/(6120η)初选电动机功率(kW)初选电动机转速(rpm)2.起动时间(s )t q =1.2GD 2n/(375M p q -375M j ) +0.975Q q v 2/[n(M p q -M j )η]高速转动部件的总飞轮矩(kg.m 2)电机的飞轮矩(kg.m 2)联轴器的飞轮矩(kg.m 2)制动轮的飞轮矩(kg.m 2)电机平均起动力矩(kg.m)M p q =(1.5~1.6)M 40e 电机额定力矩(kg.m)M 40e =975N 40e /n电机在JC40%时的额定功率(kW)电机在JC40%时的额定转速(rpm)电机的最大起动力矩(kg.m)M q max =M max =φM 40eφ 2.64M p q M q minaI 初选减速器传动比I'48.57vMt zS z [S z ]M 电机的过载倍数3.电机起动可靠性校核注:对重级或重级以上的起升机构可不进行此校核。
起重机的电气控制系统

起重机的电气控制系统 The manuscript was revised on the evening of 2021起重机的电气控制系统一、概述起重机钢结构负责载荷支承;起重机机构负责动作运转;起重机机构动作的起动、运转、换向和停止等均由电气或液压控制系统来完成,为了起重机运转动作能平稳、准确、安全可靠是离不开电气有效的传动、控制与保护。
二、起重机电气传动起重机对电气传动的要求有:调速、平稳或快速起制动、纠偏、同步保持、机构间的动作协调、吊重止摆等。
其中调速常作为重要要求。
一般起重机的调速性能是较差的,当需要准确停车时,司机只能采取“点车”的操纵方法,如果“点车”次数很多,不但增加了司机的劳动强度,而且由于电器接电次数和电动机起动次数增加,而使电器、电动机工作年限大为缩短,事故增多,维修量增大。
有的起重机对准确停车要求较高,必须实行调速才能满足停准要求。
有的起重机要采用程序控制、数控、遥控等,这些技术的应用,往往必须在实现了调速要求后,才有可能。
由于起重机调速绝大多数需在运行过程中进行,而且变化次数较多,故机械变速一般不太合适,大多数需采用电气调速。
电气调速分为两大类:直流调速和交流调速。
直流调速有以下三种方案:✧固定电压供电的直流串激电动机,改变外串电阻和接法的直流调速;✧可控电压供电的直流发电机——电动机的直流调速;✧可控电压供电的晶闸管供电——直流电动机系统的直流调速。
直流调速具有过载能力大、调速比大、起制动性能好、适合频繁的起制动、事故率低等优点。
缺点是系统结构复杂、价格昂贵、需要直流电源等。
交流调速分为三大类:变频、变极、变转差率。
✧变频调速技术目前已大量地应用到起重机的无级调速作业当中,电子变压变频调速系统的主体——变频器已有系列产品供货。
✧变极调速目前主要应用在葫芦式起重机的鼠笼型双绕组变极电动机上,采用改变电机极对数来实现调速。
✧变转差率调速方式较多,如改变绕线异步电动机外串电阻法、转子晶闸管脉冲调速法等。
32·5t桥式起重机设计(起升机构设计)
查《机械设计手册》 表8-1-66,由钢丝绳直径d=20mm,得 绳槽断面尺寸。 查《机械设计手册》 表8-1-67c,由绳槽断面尺寸,选择滑 轮轴承6224。 查《机械设计手册》 表8-1-68,由滑轮轴承尺寸,选择轮毂 尺寸。 所选滑轮:滑轮 E 20x630 120 JB/T9005.3 同理可得副起升滑轮: 滑轮 E 12.5x315 120 JB/T9005.3
1卷筒的直径2卷筒槽计算2卷筒槽计算3确定卷筒长度并验算起强度4卷筒转速5选择电动机1起升机构静功率2电动机计算功率3初步确定电动机4电动机发热校验4电动机发热校验5电动机过载校验6选择减速器1起升机构总的传动比计算2实际起升速度和实际所需功率的验算3校核减速器输出轴强度6制动器联轴器的选择1制动器装在高速轴上计算所需静制动力矩选择块式制动器查起重机设计手册表375
设计目标
桥式起重机毕业设计是在学完全部课程之后的一个重要 教学环节。其目的在于通过桥式起重机设计,使我们在拟订 传动结构方案、结构设计和装配、制造工艺以及零件设计计 算、机械制图和编写技术文件等方面得到综合训练;并对已 经学过的基本知识、基本理论和基本技能进行综合运用。从 而培养我们具有结构分析和结构设计的初步能力;使我们树 立正确的设计思想、理论联系实际和实事求是的工作作风。
系统演示
3 滑轮的选择 为了确保钢丝绳具有较长的使用寿命,滑轮的直径(子绳 槽底部算起的直径)应满足:
式中 e---- 系数,由《起重机设计手册》 表3-2-1查得,对 工作类型M5的起重机,取e=20; d---- 所选择的钢丝绳的直径,20mm。 查《机械设计手册》 表8-1-65取滑轮的直径为 =560 mm。 d平 Dh 315mm 平衡滑轮理论直径:
4 卷筒的选择 起重机中主要采用铸造圆柱形卷筒。在大多数情况下, 绳索在卷筒上只绕一层。 1)、卷筒的直径 2)卷筒槽计算 3)确定卷筒长度并验算起强度 4)卷筒转速计算功率 3)初步确定电动机 4)电动机发热校验 5)电动机过载校验
起升机构总体设计
起升机构总体设计2.1 概述起升机构是用来实现货物升降的工作机构,它是起重机械中不可缺少的部分,是起重机最重要的机构,其工作性能的优劣将直接影响起重机的技术性能。
起升机构一般由驱动装置,传动装置,制动装置,卷绕系统,取物装置以及安全辅助装置等组成。
在起重量较大的起重机中,常设有两个或多个不同起重量的起升机构,其中起重量最大的为主起升机构,其余为副起升机构。
在港口,为满足抓斗和集装箱装卸作业要求,须设置特种起升机构,如抓斗起升机构,集装箱起升机构等。
港口门座式起重机的起升机构一般应满足下列要求:(1) 起升机构设计和选型应符合买方文件规定的工作级别或规范标准的规定,当没有明确提出执行标准时,一般采用FEM规范。
中国采用《起重机设计规范》(GB3811)。
(2) 起升机构的驱动装置一般设置在机器房内,各部件安装在具有足够强度和刚性的共用的底架上。
底架再与机器房钢结构固定。
(3) 驱动装置的各传动轴同心度应是可调的,当轴同心度出现很小的偏差时可通过底盘和机座之间的调整垫片进行适当调整。
可用定位销或楔形止动块将各部件定位在底架上。
(4) 传动装置的支座应有足够的倾向刚度,以承受因钢丝绳偏斜产生的侧向力,保证盘式制动器正常工作。
(5) 钢丝绳工作时对卷筒绳槽的偏斜角一般不大于3.5°,对滑轮槽的偏斜角最大不大于5°。
当买方文件有明确规定时,应以买方文件为主。
(6) 在高速轴(减速器侧)和低速轴(卷筒轴侧)装设有可靠的制动器。
(7) 配置可靠的安全保护装置,包括高度指示器和限位保护,超载保护,超速保护,挂舱保护架,对转动部件外侧应装设安全防护栏,在卷筒的下方应有接油盘,以防止污染环境。
(8) 满足标准或买方文件规定的噪声限制要求。
(9) 便于维修保养,留有足够的维修保养空间和通道。
(10) 当电气系统发生故障时,应有将货物放置到地面或将吊具自舱内取出的措施。
2.2 起升机构的组成和典型零部件的选型要求起升机构由驱动机构,钢丝绳卷绕系统,吊具和安全保护装置等组成。
《起重机设计规范》

电气部分
主要内容
一、电源与供电 二、电气保护 三、控制系统 四、电机选择 附录P: 附录 :电机初选 附录R: 附录 :电机过载校验 附录S: 附录 :电机发热校验 五、装置及电阻器选择
一、电源与供电
对电网电压波动范围按GB5226.2中 4.3.2交 中 对电网电压波动范围按 交 流电源的电压波动范围规定为: 流电源的电压波动范围规定为 : 在正常工作 条件下,供电系统, 条件下 , 供电系统 , 在起重机械馈电线接入 处的电压波动不应超过额定值的± 处的电压波动不应超过额定值的 ±10%的要 的要 标准中规定为± , 求,但FEM标准中规定为±5%,建议在应用 标准中规定为 中尽可能要求用户的供电电源符合± 的国 中尽可能要求用户的供电电源符合±5%的国 际通用要求。 际通用要求。
电气控制部分在修订时, 电气控制部分在修订时,其内容包括了原 GB3811-1983,FEM相关部分的内容,同时 相关部分的内容, , 相关部分的内容 增加了变频调速和调压调速的说明。 对吊钩 增加了变频调速和调压调速的说明。(对吊钩 起重机,当起升机构的工作级别为M4、 起重机,当起升机构的工作级别为 、M5 和M6,且额定起升速度 ,且额定起升速度≥5m/min时要求制动 时要求制动 平稳,应采用电气制动方法,保证在0.2~ 平稳,应采用电气制动方法,保证在 ~ 1.0G范围内下降时 制动前的电动机转速降至 范围内下降时,制动前的电动机转速降至 范围内下降时 同步转速的1/3以下 该速度应能稳定运行.) 以下,该速度应能稳定运行 同步转速的 以下 该速度应能稳定运行
对于有机械偶合的多电机传动( 对于有机械偶合的多电机传动(如大容量起升机构 采用大减速机方案由两台电动机拖动, 采用大减速机方案由两台电动机拖动,大车运行机 构前后两组电动机通过车轮和轨道的偶合), ),当采 构前后两组电动机通过车轮和轨道的偶合),当采 用两套驱动装置并分别构成闭环控制时, 用两套驱动装置并分别构成闭环控制时,两套驱动 装置之间应设置负荷均衡控制功能,在起重机上, 装置之间应设置负荷均衡控制功能,在起重机上, 通常可采用如下两种负荷均衡方式: 通常可采用如下两种负荷均衡方式: 主装置为速度闭环控制、 ①主装置为速度闭环控制、从装置为转矩控制的主 从控制方式 采用下垂软化特性功能、 ②采用下垂软化特性功能、两台装置相对独立的负 荷均衡方式
起重机械的电气保护系统

起重机械的电气保护系统第一节电气设备的安全技术要求一、电动机起重机各部位运转的电动机应有较高的机械强度和过载能力,以带动大车、小车、主钩和副钩正常工作,并能适应频繁启动、反转、制动等要求。
落千丈电动机安装前必须检验绝缘性能,定子绝缘电阻应达2MΩ,转子绝缘电阻应达0.8M Ω。
在使用期间,定予绝缘电阻应达0.5MΩ,转予绝缘电阻应达0.15MΩ。
二、制动电磁铁制动电磁铁与起重机电动机配合工作,在磁铁吸合和释放时,能满足运动和制动的要求。
电磁铁安装使用前必须检验绝缘电阻,其阻值与电动机定子线圈电阻值相同。
如低于规定要求,须干燥并检验合格后方可使用。
三、控制电器起重机的控制电器主要包括控制器、电阻器等电气设备,主要起操作和控制电动机的作用。
控制器各触头因经常开闭时产生的强烈火花而烧灼,致使转动不灵或接触不良,应经常检查,发现上述情况及时修复。
电阻器在使用中温升不宜超过300℃,电阻器表面应保持清洁,易于散热。
各电阻片需保持平直和一定间距,如发现相互接触必须及时调整校正。
四、电器线路安全要求1、设计、安装和更换起重机电线电缆,应根据起重机的环境工作温度、接电保持率等因素,合理选择载流量。
起重机配线应采用电压500伏的绝缘多丝铜线。
户外起重机一律采用管配线。
户内则须采用保护式配线或管配线,无腐蚀损害的作业环境可采用明敷设绝缘线。
采用管配线时,一管内只能穿设同一电动机导线。
2、起重机的主滑线和控制滑线,有采用滑车拖拉电缆或封闭滑线方式供电及裸滑线摩擦集电供电方式两种。
在采用裸滑线供电方式时,滑线应平直、光滑且无腐蚀。
集电器应有足够的压力,并保持良好的导电性能。
起重机采用裸滑线时,应与地面或其他设施保持一定的安全距离,如对地面不小于3.5m,对汽车通道不小于6m,对一般管道不小于1m,对氧气管道不小于1.5m,对煤气、乙炔气管道不小于3m。
设在起重机司机室一侧的裸露滑线,应装设屏护装置,防止、下车时发生触电事故。
起重机起升机构卷筒的设计方案
起重机起升机构卷筒的设计方案各种建筑技术在近年来的发展有目共睹,各大的建筑公司的生产规模也逐渐加大,相应的对起重机的工作性能和起重量也有了更高的要求。
为了让起重机能够满足建筑方面的诸多要求。
各大设计单位对起重机的设计已经引起重视,对起重机的设计展开优化,让起重机的故障率全面降低。
一、常见塔式起重机的起升结构形式目前使用广泛的起重机主要有以下几种形式。
第一,起升机构采用单电机,单减速器。
第二,起升机构采取的是双电机以及双减速器,结构采取的是双卷筒结构。
使用联轴器将减速器有效连接起来,使得两个卷筒之间能够有效保持同步性。
第三,起升机构使用的是双电机和大减速器,结构采用的主要形式为双卷筒形式。
减速器和高速轴之间有效连接,整个卷筒加装安全制动器。
起升机构采用双电机,使用的减速器也是大减速器,使得低速轴和减速器之间同步连接。
第四,起升机结构采用的主要是双电机,使用的减速器主要是行星减速器,结构形式采取的也是双卷筒,然后在卷筒上安装一个安全制动器[1]。
二、起升机构中卷筒的作用起升机构中卷筒的作用主要是根据辘轳发展演化而来,为了节省更大的力气,就在其中加入了滑轮组和定滑轮组。
起重机就是在不断更新的环节中演化出来的一种产物,起重机中最重要的就是卷筒,卷筒在起吊和下降过程中发挥的作用是巨大的。
卷筒的直径一般都是从小到大,这样卷筒的设计理念相应的也会发生变化[2]。
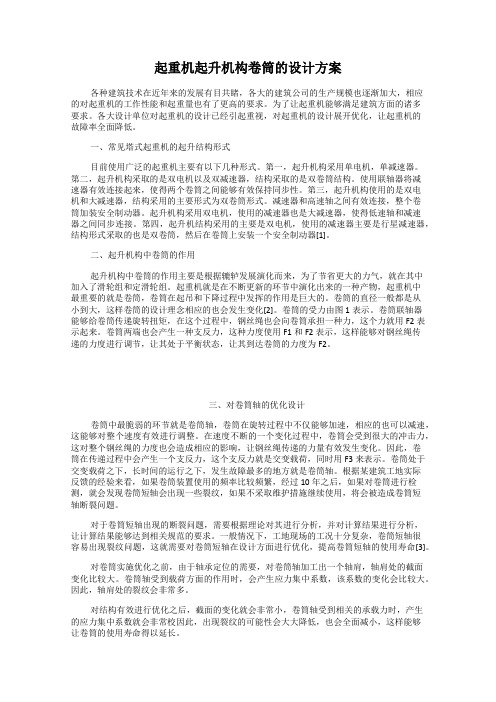
卷筒的受力由图1表示。
卷筒联轴器能够给卷筒传递旋转扭矩,在这个过程中,钢丝绳也会向卷筒承担一种力,这个力就用F2表示起来。
卷筒两端也会产生一种支反力,这种力度使用F1和F2表示,这样能够对钢丝绳传递的力度进行调节,让其处于平衡状态,让其到达卷筒的力度为F2。
三、对卷筒轴的优化设计卷筒中最脆弱的环节就是卷筒轴,卷筒在旋转过程中不仅能够加速,相应的也可以减速,这能够对整个速度有效进行调整。
在速度不断的一个变化过程中,卷筒会受到很大的冲击力,这对整个钢丝绳的力度也会造成相应的影响,让钢丝绳传递的力量有效发生变化。
1 起重机主起升机构设计

一起重机主起升机构设计按照布置紧凑的原则采用图A所示方案,采用双联尚且轮组按Q=10t查[2]表3-2-8取滑轮组倍率i h=3承载绳分支数:i h=3 z=6图A查[2]表3-4-11与3-4-12得选号为8217/220得其质量Go=24627kg两动滑轮间距L=270mm若滑轮组采用滚动轴承当in =3查表[2]3-2-11得滑轮组效率ηn=0.98钢丝绳所受最大拉力:S max =KN iGQhho425.1798.03227.246100002=⨯⨯+=+η选择82171220吊钩组查表[2]1-2-9得A6为中级工作级别,查[3]表2-4中级工作类型(工作级别M 6)时安全系数n=6.0钢丝绳计算破断为Sb:Sb=n×Smax=6×17.425=104.55KN查[1]表选用钢丝绳6×19绳纤维芯,钢丝公称抗拉强度1850N/mm2光面钢丝,右交互捻,直径d=21.5mm, 钢丝绳最小破断拉力[Sb]=324KN钢丝绳 6×19-21。
5-1850-I-光-右交GB1102-74 d=21.5mm滑轮的许用最小直径D≥d(e-1)=21.5(30-D)=624mm式中系数e=30由[2]表2-4查得,由[2]表2选和滑轮直径 D=630mmD=630mm滑轮E221.5×630-140 Zbj80006.8-87卷筒直径 D≥d(e-1)=21.5(30-1)=624mm由[1]表13选用D=630mm卷筒绳槽尺寸由[1]查表3-3-3槽距 D=630mmP1=25mm,绳槽半径R=12mm卷筒尺寸L=2(4++o Ohz D Hi π)P 1+L 1=2(425.651310163++⨯⨯⨯π)×25+270=1007mm z 0——z 0=2 L 1——L 1=A=270mmD 0——D 0=D+d=630+21.5=651.5 卷筒壁厚δ=0.02D+(6~10)=0.02×630+(6~10)=19~23mm取δ=20mm 卷筒壁压应力计算σmax=MPa p S 85.34025.002.0174251max =⨯=δ 选用灰铸铁HT200,最小抗拉强度σb =195mpa δ=20mm许用压应为[σ]y =MPa b 1305.1σσymax<[σ]Y 故抗拉强度足够 σymax<[σ]y卷筒拉应力验算因为卷筒长度2>3D 尚应校验由弯矩产生的拉应力,卷筒弯矩如图B :S max S max卷筒最大弯矩发生在钢丝绳位于卷筒中间时:M w =S max l=S max [z l l 1-]=17415×(22701007-)=6421112.5N ·mm卷筒断面系数W=0.1[D D D i 44-]=0.1×3447.5770793630590630mm =- 式中D —卷筒外径 D=630mmD i ——卷筒内径 D i =D-Z δ=630-2×20=590mm于是σ1=MPa w Mw 11.17.57707935.6421112==合成应力MPa y yLL 019.785.3411.1][][max 1=⨯=⋅+=σσσσσ 式中许用拉应力MPa n bL 75.484195][2===σσ σ1<[σ]L卷筒强度验算通过。
起重机电气设计有关计算知识汇总

电动机的计算1、起升机构电动机的计算(1)、计算机构起升额定起重量时的静载荷功率Nj:Nj=(Q+G)V/1000η(kw)【1-1】根据Nj查电动机产品目录选取电动机相应于JC%=40%值时的额定功率Ne,并满足下式:Ne≧kdNj 【1-2】式中标kd--系数,见表1.表1----起升机构kd值电动机形式起重机工作特性及机构工作级别kdJZR2、YZR、JZRH M1-M6级M7级M8级慢速(1~3m/min),经常满载的起重机0.75~0.850.85~0.951.0~1.10.9~1.0JZ、YZ M1- M6级及防爆起重机0.9JO M1- M4级及某些特殊机构1.02、运行机构电动机的计算满载运行时电动机的静功率:Nj=PjVc/1000ηm(kw)【1-3】Pj--满载运行时的静阻力(计算方法见下式)。
Vc--运行速度(m/s)。
对桥式及龙门式起重机与装卸桥的运行机构初选电动机时的功率按下式:Ne=kdNj 【1-4】Kd—为克服起动时的惯性,电动机功率的增大系数。
对室内工作的桥式起重机的大、小车与装卸桥的小车(挡风面积小的高速运行机构)按下表选Kd值。
(w=0.01相当于滚动轴承:w=0.02相当于滑动轴承)运行速度(m/s)0.5 1.0 1.5 2.0 2.5 3.0起动时间(s)kd(w=0.01)kd(w=0.02)51.21.0 61.61.15 6.52.01.3 7.52.21.5 81.8 92.62.2当起重机(或小车)在室外工作时:Pj=Pm+Pp+Pf(N)【1-6】当起重机(或小车)在室内工作时:Pj=Pm+Pp(N)【1-7】Pm—运行摩擦阻力;Pp—坡度阻力;Pf—风阻力Pm=2Mm/Dc=2(G+Q)*(k+μd/2)*β/Dc=(G+Q)ω 【1-8】ω=(2k+μd)*β/Dc 【1-9】Mm=(G+Q)(k+μd/2)*β 【1-10】式中Dc—车轮直径ω=(2k+μd)*β/Dc—单位摩擦阻力系数,对于滚动轴承车轮ω=0.006~0.010;对于滑动轴承车轮ω=0.015~0.025电线电缆工作电流和最大电流的计算方法1、工作电流的计算方法(1)、保护箱容量小,机构较小的起重机Iw=IN1+IN2+IN3 【2-1】式中Iw—系统的工作电流;IN1--功率最大的机构的电动机额定电流;IN2、IN3 --其它两个可能同时工作的机构的电动机额定电流。
3-2 起升机构布置方案

电机 → 弹性联轴器 → 减速器 → 卷筒
§3-2
起升机构布置方案
二、轮胎起重机起升机构布置方案: 1、用吊钩及双绳抓斗的起升机构布置: ⑴布置型式: 起升机构:采用电动机驱动,一台电机通过减速 器集中驱动两个卷筒。 电机→联轴器→浮动轴→减速器高速轴→减速器 低速轴→开式齿轮传动→滚筒主、副卷筒分别通过滚 动轴承支承在同一根卷筒轴上,卷筒的一端有摩擦凸 缘,在其外面安装着带式制动器,在其内部安装着内 涨离合器。 ⑵工作原理: 起升机构实现动力上升、重力下降。
§3-2 起升机构布置方案
起升机构的布置方案与起重机的驱动型式有关: 一、电力驱动起升机构布置方案: 1、平行轴线布置: 电动机轴与卷筒轴平行布置 ⑴吊钩起重机: 结构紧凑,制造、安装方便,卷筒轴受力静定。 ⑵抓斗起重机: 抓斗起重机使用双绳抓斗时,必须有两套独立的起 升机构。
§3-2
起升机构布置方案
§3-3
起升机构的计算
七、电动机验算: 1、起动时间验算: 验算起升额定起重量时的起动时间。 电动机轴上的力矩方程式: MQ = Mj + Mg PGD02/m2i2η)/375(mQ-mj) s 起动时间依起升速度而定,对于一般起升速度,不 太大的起重机,tQ = 05∽2s 可据平均加速度来判断tQ 是否合格。 tQ过小:所选电动机功率过大,应选低一档的电机 或采用电气控制。 tQ过大:所选电机容量不足,应改选高一档的电机。 2、电动机过载验算: Nn ≥ H· PG· Vn′/6000mηλm
§3-3
起升机构的计算
六、联轴器的选择: 1、联轴器的计算力矩: Mc = n· MⅠmax 式中:n--- 联轴器的安全系数。 MⅠmax ---- 联轴器疲劳计算基本载荷力矩。 2、选联轴器: 起升机构常用的联轴器:弹性柱销联轴器、齿轮 联轴器、万向联轴器等。 ⑴选高速轴联轴器---- 采用弹性柱销联轴器、齿轮 联轴器,按Mc、轴径、长度查手册选定。 ⑵低速轴联轴器 --- 一般采用齿轮联轴器,同样查 手册选定。 所选的联轴器应满足: Mc ≤ Mt Mt ---- 联轴器规格参数表中的许用力矩。
基于配置技术的起重机起升机构快速设计系统

基于配置技术的起重机起升机构快速设计系统罗臣强;仲梁维;朱娟【摘要】As the many components of custom-made in Crane designing, we often adopt the personalized design method according to the orders and the method can cause the longer design cycle and more design error problems. For that reason, we propose a rapid designing system and architecture, adopting database to save the knowledge of design and selecting components smartly, founding model by the 3D software Solidworks, and drived by Visual Basic. Practice has proved that this system makes the design fast and accuracy, increasing to design requirement greatly.%起重机设计因为客户定制成分较多,一般采用根据订单的个性化设计方法,从而造成设计周期长、设计错误多的问题.鉴于此提出了一种快速设计系统的方法和架构,用数据库存储设计知识,用产品配置的方法智能选取外购件和部分零部件,模型基于Solidworks三维软件建立,采用Visual Basic进行驱动.实践证明应用此系统使得设计速度及准确率大大提高,达到了设计要求.【期刊名称】《计算机系统应用》【年(卷),期】2012(021)002【总页数】4页(P18-21)【关键词】起升机构;Solidworks二次开发;产品配置;个性化设计;快速设计系统【作者】罗臣强;仲梁维;朱娟【作者单位】上海理工大学机械工程学院,上海200093;上海理工大学机械工程学院,上海200093;上海理工大学机械工程学院,上海200093【正文语种】中文如今由于各工业企业工作环境、工作条件等基本条件的差异,使起重机设计有面向客户订单式的特点,即在保证基本工作原理、结构不变的情况下,所生产的各起重机外形尺寸、具体机构构成、工作参数都各不相同。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
电源 。
4 . 4 . 3 超速开关
图 4 变频电机负载特性曲线
对于弱磁升速功能 , 在变频器上仅需将 6 9 . 0 1 , 2
0 . O 1 , 2 0 . 0 2 设 置为电机额定速度 的二倍 ,同时 , 在
P L C中 , 通过 P R O F I B U S — D P总 线 , 将 各 档位 速 度 给
位开关 。 当钩头 上升 到设 计规 定 的上升极 限位置 时 , 旋 转 限位开 关能 自动切 断起 升 电源 ,一旦旋 转 限位 开关失 灵 , 钩头 继续 上升 时 , 最后一 级保 护一 重锤 限
位将起作用 , 切断整车电源 ; 当钩头下降到设计规定 的下降极限位置时 ,旋转限位开关能 自动切断下降
l O 0 o 0
4 9 2 r / m i n
9 8 5 r / m i n
1 O o 0 0
9 8 5 r / a r i n
2 0 o 0 0 1 9 7 0 r / m i n
4 . 4 安 全保护 装置
【 2 ] A B B A C S 8 0 0固件手册 , 2 0 1 1
《 起 重机械安全规程》 中规定 : 对于重要 的 、 负 载超速会 引起 危险的起升机构 和非平衡式 变幅机
构应 设 置超 速开 关 。超 速 开关 的整 定 值取决 于控制
定值输送给变频器 , 即可实现速度分 0 0 对应 1 0 0 %) 。
4 . 4 . 1载荷限制装置 载荷限制装置的作用是防止起重机 因超载造成
—
1 3 —
速度给定值 电机转速 速度给定值 电机转速
l O o o 2 5 o o 9 8 r / m i n 2 4 6 r / ai r n 2 0 o 0 5 O 0 o 1 9 6 r / a r i n 4 9 2 r / m l n
档
二 档
三档
四档
5 O 0 o
以, 在空载时 , 使用弱磁升速功能, 以提高工作效率。
变频电机负载特陛如图 4 所示 , 其基频为 5 0 H z 。
0 ~ 5 0 H z 为恒转矩 调速 , 电机输 出额定 转矩 ; 5 0 ~ 1 0 0 Hz
另外 , 对于具有弱磁升速功能的电气系统 , 载荷
限制 装置还应 提供空 载检测 点 , 一般 为额定起 重量 的 1 0 %。只有 载荷 重量在 额定 起重量 的 1 0 %以下 时 , 才
为恒功率调速。若使电机在 5 0 ~ l O O H z 恒功率段运行 时, 其输 出转矩反时限下降, 所以此时只可空载快速
升降 。
允许使用弱磁升速功能 , 以防止司机误操作 , 在: 重载 情况下, 仍使用弱磁升速。
4 4 . 2 行程 限制装置
行程 限制装置主要包括旋转限位开关和重锤限
正常速度模式 档位
一
弱磁升速模式
调速桥式起重机 , 线路简化 , 各项调速性能均优于传 统的绕线异步电动机转子串电阻调速系统,此外 , 变 频器和 P L C完善的故障诊断和显示功能也使整个调
速 系统 的可靠性 、 可维修 陛得到大 幅度 提高 。
参考文献 【 1 】 段苏振. 交流变频调速技术在门式起重机 中的应用 . 电气 传动 , 2 0 0 5
此项 目中 ,主起升 电机 的额定 速度 是 9 8 5 r / a r i n 。
系统性能和额定下降速度 , 通常为额定速度 的 1 . 2 5
~
1 . 4 倍。
两种模式下 , 其各档位电机速度值见表 2 。
表2 各档 位 电机 速 度值
5 结论
实践 证 明 , P L C P R OF I B U S — D P通 讯 控制 的变 频
重 工与起 重技 术
HEAVY I NDUS T R L & H0I S r I 1 NG MACHI NER Y
・ 主机能跟随速度给定值 ;
・ 从机能跟随主机的速度给定值。
4 . 3 弱磁升 速功能
机械结构损坏或事故发生 , 主要包括电子秤和起重量 限制器。当起升载荷达额定起重量 9 0 %时 , 载荷限制
装置 能发 出提示 性报警 信号 ; 当起升载 荷达额定 起重 量 1 1 0 %时 ,立 即切断起 升动力 电源并发 出禁 止性报 警信 号 。
主起升机构额定速度为 2 . 5 m / a r i n , 而其起升高度 为2 3 m 。 其上升 、 下降一个循环 , 需要近二十分钟。 所