舵机图片参数!
船用舵机

v——舵叶处的水流速度
J——舵压力中心至舵导边距离, b——舵叶平均宽度
精品课件
精品课件
舵水作用力F对船舶运动的影响
假设在船舶重心G处加上一对方向相反而数值均等于F 的力F1、F2
那么水作用力F对船体的作用
可用水作用力对船舶重心所产生的力矩Ms和F2的作用来代替。 由为转F和船F1力形矩成:的力矩Ms迫使船舶绕其重心向偏舵方向回转,称 F2则又可分解为R和T两个分力 纵向分力R=F2sinα,增加了船舶前进的阻力 横向分力T=F2cos α ,使船向偏舵的相反方向漂移
普通平衡舵 Mf=(0.15~0.20) Ma Mα可用经验公式或舵的模型试验资料计算
公称转舵扭矩
指在规定的最大舵角时所能输出的最大扭矩 它是根据船舶在最深航海吃水和以最大营运航速前进时,将舵转
到最大舵角所需要的扭矩来确定的 公称转舵扭矩是确定舵机结构尺寸和工作参数的基本依据
精品课件
8-1-2-2 综上可见
(1)水动力矩与舵叶的面积A和舵叶处水流速度的平
方成正比,并随舵角的增大而增大 (2)不平衡舵
因X=Xc,故当船舶正航并向一舷转舵时,水动力矩将始终为 正(指与舵叶转向相反),而回舵时则变为负(指与舵叶转向 相同)
平衡舵因Xc=X—Z,小舵角时由于压力中心。处于舵杆轴线的 前方,故Ma为负,只有当舵角增大到某一数值之后, Ma才会 因O点移到轴线之后而变为正值
矩 式中:CN,称为压力系数,其余符号同式(8—1)
转舵扭矩M
操舵装置施加在舵杆上的扭矩
舵摩M 匀擦a 速扭 转矩F 动MN f 时X 的,C 代转数 舵和( 扭F ,L 矩即c MM=即应Mo a等F 于+D 水Mc n 动f 力矩o ) a X Ma和c 舵n 各1 2 支C 承N a 处A 的总2 X c v
数字舵机参数

数字舵机参数数字舵机是一种常用于控制机械臂、车辆转向、舵机模型等设备的电动执行器。
它采用数字信号控制,可以精确控制舵机的位置和速度。
数字舵机的参数包括转动角度、转速、转矩、分辨率、工作电压等。
转动角度是数字舵机最重要的参数之一。
它表示舵机能够转动的最大角度范围。
一般来说,数字舵机的转动角度范围在0到180度之间,也有些型号可以达到360度。
转动角度越大,舵机的灵活性和应用范围就越广。
转速也是数字舵机的重要参数之一。
转速表示舵机能够达到的最大转动速度。
转速越高,舵机的响应速度越快,控制精度也越高。
但是需要注意的是,高转速也会增加舵机的功耗,因此在选择舵机时需要根据实际需求权衡转速和功耗的关系。
除了转动角度和转速,转矩也是数字舵机的重要参数之一。
转矩表示舵机能够承受的最大力矩。
转矩越大,舵机能够承受更大的负载,适用于需要承受较大力矩的应用场景。
但是需要注意的是,转矩过大也会增加舵机的体积和重量,因此在选择舵机时需要根据实际需求权衡转矩和尺寸的关系。
分辨率也是数字舵机的重要参数之一。
分辨率表示舵机能够达到的最小角度变化量。
分辨率越高,舵机的控制精度越高,能够实现更精确的位置控制。
一般来说,数字舵机的分辨率在1到10度之间,分辨率越小,控制精度越高。
工作电压是数字舵机的基本参数之一。
它表示舵机能够正常工作的电压范围。
不同型号的数字舵机的工作电压范围可能不同,一般在4.8V到7.2V之间。
在选择舵机时,需要根据实际电源的电压确定舵机的工作电压范围,以确保舵机能够正常工作。
数字舵机的参数包括转动角度、转速、转矩、分辨率和工作电压等。
这些参数直接影响到数字舵机的性能和适用范围。
在选择数字舵机时,需要根据实际需求和应用场景来确定合适的参数。
同时,还需要注意舵机的品牌和质量,以确保舵机的可靠性和稳定性。
数字舵机的不同参数组合可以满足不同的控制需求,为各种机械设备的运动控制提供了便利和灵活性。
机器人常用舵机整理

包装内容:舵机本体X1个、摆臂附件X1袋
包装规格:PE袋120X85 X0.07mm、净重-62g、毛重-79g
市场价格:100左右
产品规格
技朮養数
尺寸(mm]
重里
线长
6V
7+4V
转动角度
扭力
扭力
A
B
C
7
E
g
OZ
cm
secy50°
kg ■:it
or in
sec/60°
kg'em
oz'in
斗1.3
20.7
40
50.3
10.0
62
2.19
30.0
0.2
12.2
169.72
0.18
14.5
201.7
180°
(产品规格如有储正,不启行通知)
3机器人专用舵机春天
SR-310
180度舵机
产品简介
用于机器人,
产品包装
◊散装(
包装内容:舵机本体
包装规格:尺寸-95)85>0.07mm、净重-20g、毛重-25.8g
市场价:
产品规格
拽术藝痢
重里
线长
4.8V
6V
转动角度
速度
扭力
速度
田力
A
C
0
E
g
oz
cm
sec,/60°
kg 'em
ozain
seq/&0D
kg"citi
oz'ini
31J
16.5
29.6
3S.1
B.O
20
0.71
mg995舵机中文资料(参数_尺寸_控制程序)
mg995舵机中文资料(参数_尺寸_控制程序)
mg995舵机参数与尺寸产品尺寸40.7*19.7*42.9mm
产品重量55g
工作扭矩13KG/cm
反应转速:53-62R/M
使用温度:-30~+60°
死区设定:4微秒
插头类型:JR、FUTABA通用
转动角度:最大180度
舵机类型:模拟舵机
工作电流:100mA
使用电压:3-7.2V
结构材质:金属铜齿、空心杯电机、双滚珠轴承无负载
操作速度:0.17秒/60度(4.8V);0.13秒/60度(6.0V)
附件包含:舵盘、线长30CM、固定螺钉、减振胶套及铝套等附件
mg995舵机使用范围适用范围:1:10和1:8平跑车、越野车、卡车、大脚车、攀爬车、双足机器人、机械手、遥控船,适合50级-90级甲醇固定翼飞机以及26cc-50cc汽油固定翼飞机等模型。
mg995舵机接线舵机上有三根线,分别为VCC、GND、信号线。
控制信号一般要求周期为20ms的PWM信号。
VCC、GND需要另外接驱动给舵机供电,而且得和开发板共地。
中间的永远是电源正极。
mg995舵机控制原理舵机的控制一般需要一个20ms的时基脉冲,该脉冲的高电平部分一般为0.5ms~2.5ms范围内的角度控制脉冲部分。
以180度角度舵机为例,那么对应的控制关系是这样的:。
舵机

1、概述舵机也叫伺服电机,最早用于船舶上实现其转向功能,由于可以通过程序连续控制其转角,因而被广泛应用智能小车以实现转向以及机器人各类关节运动中,如图1 、图2 所示。
图1 舵机用于机器人图2 舵机用于智能小车中舵机是小车转向的控制机构,具有体积小、力矩大、外部机械设计简单、稳定性高等特点,无论是在硬件设计还是软件设计,舵机设计是小车控制部分重要的组成部分,图3为舵机的外形图。
图3 舵机外形图2、舵机的组成一般来讲,舵机主要由以下几个部分组成,舵盘、减速齿轮组、位置反馈电位计、直流电机、控制电路等,如图4、图5所示。
图4 舵机的组成示意图图5 舵机组成舵机的输入线共有三条,如图6所示,红色中间,是电源线,一边黑色的是地线,这辆根线给舵机提供最基本的能源保证,主要是电机的转动消耗。
电源有两种规格,一是4.8V,一是6.0V,分别对应不同的转矩标准,即输出力矩不同,6.0V对应的要大一些,具体看应用条件;另外一根线是控制信号线,Futaba的一般为白色,JR的一般为桔黄色。
另外要注意一点,SANWA的某些型号的舵机引线电源线在边上而不是中间,需要辨认。
但记住红色为电源,黑色为地线,一般不会搞错。
图6 舵机的输出线3、舵机工作原理控制电路板接受来自信号线的控制信号,控制电机转动,电机带动一系列齿轮组,减速后传动至输出舵盘。
舵机的输出轴和位置反馈电位计是相连的,舵盘转动的同时,带动位置反馈电位计,电位计将输出一个电压信号到控制电路板,进行反馈,然后控制电路板根据所在位置决定电机转动的方向和速度,从而达到目标停止。
其工作流程为:控制信号→控制电路板→电机转动→齿轮组减速→舵盘转动→位置反馈电位计→控制电路板反馈。
流,才可发挥舵机应有的性能。
舵机的控制信号周期为20MS的脉宽调制(PWM)信号,其中脉冲宽度从0.5-2.5MS,相对应的舵盘位置为0-180度,呈线性变化。
也就是说,给他提供一定的脉宽,它的输出轴就会保持一定对应角度上,无论外界转矩怎么改变,直到给它提供一个另外宽度的脉冲信号,它才会改变输出角度到新的对应位置上如图7所求。
【船海百科】图解几种常用的舵机

【船海百科】图解几种常用的舵机“船海人”跑过船的人应该知道,船上大型机器设备的“四机一炉”,亦即主机、发电机、锚机、舵机和锅炉。
这些都是与船舶推进和操纵极其密切的关键设备。
之前我们推出过一期文章,讲解各种推进装置。
今天为与小刀昨天的舵设备相呼应,简单介绍以下几种常用的舵机,以飨读者。
本期文章部分图片资料,由甲板机械的领导品牌海特拉帕友情提供。
ps,海特拉帕已经于2013年被Cargotech旗下的麦基嘉收购,以增强其绞车方面的业务,同年麦基嘉还收购Aker Solutions的系泊和装载系统部门。
言归正传开始本期文章。
舵机按照机构分为电力,机械和液压三种方式;按照动力源的方式有人力、气动、电动、液压四种;船用舵机目前多用电液式,即液压设备由电动设备进行遥控操作,电液式又可分为两大类型,一种是往复式,往复式又包括摆杠式,柱塞式和拨叉式等几种。
1. 往复摆杠式舵机这种舵机形式比较简单,高度低,很便于船员操作和维护,操舵角度可达45°。
通常一个油泵驱动一个油缸操左右舵机,根据管路布置情况,左右舵机可以互换,也可以双泵驱动。
通常设有2台互为备用的液压泵站(或1台液压泵站与1台机带泵组互为备用),24V电动操纵、手轮操纵、手轮应急操舵等多种操舵型式。
具有多重自锁能力、舵角稳定功能。
在船上系统总成如下所示。
2. 往复柱塞式舵机柱塞式舵机,其原理是通过高低压油的转换而做功产生直线运动,并通过舵柄转换成旋转运动。
目前,船上常用的有二缸柱塞式液压舵机和四缸柱塞式液压舵机。
图为二缸柱塞式液压舵机示意图。
柱塞式液压舵机一般由转舵机构、动力源和操纵追随机构三大部分组成。
动力源由电动机、主油泵、辅油泵和控制阀箱等组成。
电动机带动主、辅油泵供给工作需要的各种压力油,安全控制阀是起保护作用和对压力油的分配。
转舵机构由油缸、柱塞和舵柄等。
当操舵装置控制系统启动电机带动变量泵时,变量泵从一对(或一个)油缸中抽油,同时向另一对(或一个)油缸输油,从而推动柱塞直线运动并使舵柄绕舵杆作旋转运动,产生舵角。
舵机参数

TOWER PRO(辉盛)最新大扭力舵机MG996R (MG995升级产品)6v/11Kg辉盛新品,原MG995的升级产品,速度,拉力和精确度都有相应提高,是目前市场上性价比最高的大扭力舵机之一.本站推荐!适合50级-90级甲醇固定翼飞机以及26cc-50cc汽油固定翼飞机等模型.与MG946R相比,MG996R 速度快一些,但拉力稍小一些.技术参数:产品名称:TOWER PRO(辉盛)最新大扭力舵机MG996R (MG995升级产品)6v/11Kg 厂家编号:MG996R产品净重: 55g产品尺寸: 40.7*19.7*42.9mm产品拉力: 9.4kg/cm(4.8V), 11kg/cm(6V)反应速度: 0.17sec/60degree(4.8v) 0.14sec/60degree(6v)工作电压: 4.8-7.2V工作温度: 0℃-55℃齿轮形式: 金属齿轮工作死区: 5us (微秒)适合机型: 50级-90级甲醇固定翼机以及26cc-50cc汽油固定翼飞机等TOWER PRO(辉盛)最新大扭力标准金属齿舵机MG946R (MG945升级产品)6v/13Kg辉盛新品,原MG945的升级产品,速度,拉力和精确度都有相应提高,是目前市场上性价比最高的大扭力舵机之一.本站推荐!适合50级-90级甲醇固定翼飞机以及26cc-50cc汽油固定翼飞机等模型.技术参数:产品名称:TOWER PRO(辉盛)最新大扭力舵机MG946R (MG945升级产品)6v/13Kg 厂家编号:MG946R产品净重: 55g产品尺寸: 40.7*19.7*42.9mm产品拉力: 10.5kg/cm(4.8V),13kg/cm(6V)反应速度: 0.20sec/60degree(4.8v)0.17sec/60degree(6.0v)工作电压: 4.8-7.2V工作温度: 0℃-55℃齿轮形式: 金属齿轮工作死区: 5us (微秒)适合机型: 50级-90级甲醇固定翼机以及26cc-50cc汽油固定翼飞机等[902-0003-001] DYNAMIXEL AX-12A■注意** 为了强化内部结构,外部形态部分变更(AX-12A Gear Set/SKU No. 902-0087-001),和AX-12+(SKU No. 903-0087-000)不能互换。
hitec hs422标准舵机旋转角度

一、介绍Hitec HS422标准舵机是一款常见的舵机产品,具有高性能和稳定的特点。
在航模、机器人、船模、车模等领域得到了广泛的应用。
其中,舵机的旋转角度是其功能性能的重要指标之一。
二、Hitec HS422标准舵机的基本参数1. 工作电压:4.8V-6.0V2. 工作温度:0-55℃3. 速度(4.8V):0.21秒/60°4. 扭矩(4.8V):3.7kg·cm5. 旋转角度:180°三、Hitec HS422标准舵机的旋转角度1. 180°旋转Hitec HS422标准舵机的旋转角度为180°,即可实现从0°到180°的旋转。
在控制系统中,可通过送入相应的PWM脉冲信号来控制舵机的位置,从而实现精准的角度控制。
2. 可调节Hitec HS422标准舵机还具有可调节的旋转角度功能,通过对舵机内部的限位螺丝进行调整,可以改变舵机的最大旋转角度,满足不同应用场景对于角度控制的需求。
四、Hitec HS422标准舵机的应用Hitec HS422标准舵机的180°旋转角度使得它在各种机械控制系统中都有着广泛的应用,比如:1. 机器人关节控制2. 航模飞行控制3. 船模舵机控制4. 车模转向控制5. 工业自动化设备控制五、结论可见,Hitec HS422标准舵机在180°旋转角度的基础上,还具有可调节的特点,能够满足不同应用场景的需求。
其高性能和稳定性使得它在各种领域得到了广泛的应用。
在未来的发展中,随着技术的不断进步,相信Hitec HS422标准舵机会有着更加广阔的应用前景。
六、Hitec HS422标准舵机的旋转角度控制技术Hitec HS422标准舵机不仅具有180°的旋转角度,而且还融入了先进的控制技术,使得其在角度控制方面表现出色。
1. PWM脉冲控制Hitec HS422标准舵机采用PWM(脉冲宽度调制)控制方式,通过改变输入的PWM脉冲信号的脉冲宽度,可以精确地控制舵机的旋转角度。
舵机数据资料

五、PCA9685测量值 pulse_width
角度 实际值 计算值
190 2.59 2.59
180 2.48 2.48
135 2.0 1.985
90 1.49 1.49
45 1.0 0.995
date=4096*((angle*11)+500)/20000 #进行四舍五入运算 date=int(4096*((angle*11)+500)/(20000)+0.5)
pwm.set_pwm(channel, 0, date)
二、SG90厂家给出的技术数据:
尺寸:21.5mmX11.8mmX22.7mm
重量:9克 (1kg=1公斤=2斤)
无负载速度:0.12秒/60度(4.8V) 0.002s/度
堵转扭矩:1.2-1.4公斤/厘米(4.8V)
使用温度:-30~~+60摄氏度
死区设定:7us (7MHZ)
工作电压:4.8V-6V
date/4096=pulse_width/20 ->有上pulse_width的计算结果得date=4096*( ((angle*11)+500)/1000 )/20 -->int date=4096((angle*11)+500)/20000;
def set_servo_angle(channel, angle): #输入角度转换成12^精度的数值
-10 0.39 0.39
4、舵机控制系统工作稳定,PWM占空比 (0.5~2.5ms 的正脉冲宽度)和舵机的转角(-90°~90°)线性度较好
舵机的控制需要一个20ms左右的时基脉冲(1/0.020s=50HZ),该脉冲的高电平部分为0.5ms~2.5ms范围内的角度控制脉冲部分。以180度角度伺服为例,那么对应的控制关系是:
舵机及其转向控制基本原理

舵机及转向控制原理1、概述2、舵机的组成3、舵机工作原理4、舵机选购5、舵机使用中应注意的事项6、辉盛S90舵机简介7、如何利用程序实现转向8、51单片机舵机测试程序1、概述舵机也叫伺服电机,最早用于船舶上实现其转向功能,由于可以通过程序连续控制其转角,因而被广泛应用智能小车以实现转向以及机器人各类关节运动中,如图1 、图2 所示。
图1 舵机用于机器人图2 舵机用于智能小车中舵机是小车转向的控制机构,具有体积小、力矩大、外部机械设计简单、稳定性高等特点,无论是在硬件设计还是软件设计,舵机设计是小车控制部分重要的组成部分,图3为舵机的外形图。
图3 舵机外形图2、舵机的组成一般来讲,舵机主要由以下几个部分组成,舵盘、减速齿轮组、位置反馈电位计、直流电机、控制电路等,如图4、图5所示。
图4 舵机的组成示意图图5 舵机组成舵机的输入线共有三条,如图6所示,红色中间,是电源线,一边黑色的是地线,这辆根线给舵机提供最基本的能源保证,主要是电机的转动消耗。
电源有两种规格,一是4.8V,一是6.0V,分别对应不同的转矩标准,即输出力矩不同,6.0V对应的要大一些,具体看应用条件;另外一根线是控制信号线,Futaba的一般为白色,JR的一般为桔黄色。
另外要注意一点,SANWA的某些型号的舵机引线电源线在边上而不是中间,需要辨认。
但记住红色为电源,黑色为地线,一般不会搞错。
图6 舵机的输出线3、舵机工作原理控制电路板接受来自信号线的控制信号,控制电机转动,电机带动一系列齿轮组,减速后传动至输出舵盘。
舵机的输出轴和位置反馈电位计是相连的,舵盘转动的同时,带动位置反馈电位计,电位计将输出一个电压信号到控制电路板,进行反馈,然后控制电路板根据所在位置决定电机转动的方向和速度,从而达到目标停止。
其工作流程为:控制信号→控制电路板→电机转动→齿轮组减速→舵盘转动→位置反馈电位计→控制电路板反馈。
流,才可发挥舵机应有的性能。
舵机的控制信号周期为20MS的脉宽调制(PWM)信号,其中脉冲宽度从0.5-2.5MS,相对应的舵盘位置为0-180度,呈线性变化。
舵机及转向控制原理

舵机及转向控制原理1、概述2、舵机的组成3、舵机工作原理4、舵机选购5、舵机使用中应注意的事项6、辉盛S90舵机简介7、如何利用程序实现转向8、51单片机舵机测试程序1、概述舵机也叫伺服电机,最早用于船舶上实现其转向功能,由于可以通过程序连续控制其转角,因此被广泛应用智能小车以实现转向以及机器人各类关节运动中,如图1 、图2 所示。
图1 舵机用于机器人图2 舵机用于智能小车中舵机是小车转向的控制机构,具有体积小、力矩大、外部机械设计简单、稳定性高等特点,无论是在硬件设计还是软件设计,舵机设计是小车控制局部重要的组成局部,图3为舵机的外形图。
图3 舵机外形图2、舵机的组成一般来讲,舵机主要由以下几个局部组成,舵盘、减速齿轮组、位置反响电位计、直流电机、控制电路等,如图4、图5所示。
图4 舵机的组成示意图图5 舵机组成舵机的输入线共有三条,如图6所示,红色中间,是电源线,一边黑色的是地线,这辆根线给舵机提供最根本的能源保证,主要是电机的转动消耗。
电源有两种规格,一是4.8V,一是6.0V,分别对应不同的转矩标准,即输出力矩不同,6.0V对应的要大一些,详细看应用条件;另外一根线是控制信号线,Futaba的一般为白色,JR的一般为桔黄色。
另外要注意一点,SANWA的某些型号的舵机引线电源线在边上而不是中间,需要识别。
但记住红色为电源,黑色为地线,一般不会搞错。
图6 舵机的输出线3、舵机工作原理控制电路板承受来自信号线的控制信号,控制电机转动,电机带动一系列齿轮组,减速后传动至输出舵盘。
舵机的输出轴和位置反响电位计是相连的,舵盘转动的同时,带动位置反响电位计,电位计将输出一个电压信号到控制电路板,进展反响,然后控制电路板根据所在位置决定电机转动的方向和速度,从而到达目的停顿。
其工作流程为:控制信号→控制电路板→电机转动→齿轮组减速→舵盘转动→位置反响电位计→控制电路板反响。
流,才可发挥舵机应有的性能。
舵机的控制信号周期为20MS的脉宽调制〔PWM〕信号,其中脉冲宽度从0.5-2.5MS,相对应的舵盘位置为0-180度,呈线性变化。
9g舵机参数

9g舵机参数
9g舵机的具体参数可能因型号和制造商而有所不同,但一般来说,9g舵机的工作电压通常在\~之间,工作频率为1520μs / 330hz。
在空载速度方面,不同电压下的空载速度不同。
例如,在的电压下,空载速度为秒/60度;在的电压下,空载速度为秒/60度;在的电压下,空载速度
为秒/60度;在的电压下,空载速度为秒/60度。
此外,9g舵机的堵转扭矩和额定工作扭矩也会随电压的升高而增大。
例如,堵转扭矩在时为,最大工作扭矩在时为。
额定工作扭矩在不同电压下也有所不同,例如在时为,在时为,在时为,在时为。
至于9g舵机的尺寸和重量,根据不同型号也有所不同。
例如,有些型号的
尺寸为\\,重量为19g;有些型号的尺寸为28\\27mm,重量为26g。
以上信息仅供参考,具体参数可能因产品而异。
如需了解9g舵机的参数,
建议查看产品说明书或向制造商咨询。
舵机相关标准

舵机相关标准
舵机是一种常见的电动执行器,主要用于控制机械系统的运动。
舵机通常具有以下几个标准参数:
1. 转向角度范围:舵机通常可以在一定范围内旋转,一般为180度或360度。
不同的舵机转向角度范围不同,需要根据实际需求选择
合适的舵机。
2. 转动速度:舵机的转动速度也是一个重要的参数。
一般以度/
秒或弧度/秒来表示。
不同的舵机转动速度不同,需要根据实际应用场
景选择适合的转动速度。
3. 扭矩:舵机的扭矩决定了它能驱动多大的负载。
通常以
kg·cm或oz·in来表示。
较大的扭矩意味着舵机可以驱动较大的负载。
4. 工作电压:舵机的工作电压通常为直流电压,常见的工作电
压为4.8V、6V、7.2V、9V等。
需要根据实际应用情况选择合适的工作
电压。
5. 控制信号:舵机通常使用PWM脉宽调制信号进行控制。
通常
情况下,脉宽范围为1ms到2ms,周期为20ms。
脉宽决定了舵机的转
向角度,可以根据具体需求进行调整。
6. 尺寸与安装孔距离:舵机的尺寸与安装孔距离也是需要考虑
的因素。
不同的舵机尺寸不同,需要根据实际安装空间选择合适的尺寸。
这些标准参数在选择舵机时需要考虑,根据具体需求选择合适的
舵机才能更好地满足应用需求。
FUTABA舵机参数大全

FUTABA舵机参数⼤全S9150 Digital servo尺⼨:47.5X27X25.3mm重量:53g速度:0.18sec/60"(4.8V)扭⼒:5.8kg:cm(4.8V)——————————————————————————S9151 Digital servo尺⼨:40X20X36.6mm重量:50g速度:0.19sec/60"(4.8V)扭⼒:9.5kg:cm(4.8V)——————————————————————————S9206尺⼨:40.5X20X37.5mm重量:53g速度:0.19sec/60"(4.8V)扭⼒:9.5kg:cm(4.8V)——————————————————————————S9601尺⼨:31X16X30.2mm重量:31g速度:0.15sec/60"(4.8V)扭⼒:2.4g:cm(4.8V)——————————————————————————S9250 Digital servo尺⼨:40.5X20X37.5mm重量:54g速度:0.11sec/60"(4.8V)扭⼒:5.5kg:cm(4.8V)——————————————————————————S9253 Digital servo尺⼨:40X20X36.6mm重量:49g速度:0.08sec/60"(4.8V)扭⼒:2.0kg:cm(4.8V)——————————————————————————S3103尺⼨:21.8X11X19.8mm重量:9.5g速度:0.11sec/60"(4.8V)扭⼒:1.2kg:cm(4.8V)——————————————————————————S3102尺⼨:28X13X29.7mm重量:21g速度:0.25sec/60"(4.8V)扭⼒:3.7kg:cm(4.8V)——————————————————————————S9450 Digital servo尺⼨:40.5X20X37.5mm重量:55g速度:0.10sec/60"(4.8V)扭⼒:8.0kg:cm(4.8V)——————————————————————————S9251 Digital servo尺⼨:40X20X36.6mm重量:57g速度:0.07sec/60"(4.8V)扭⼒:3.7kg:cm(4.8V)——————————————————————————S3101尺⼨:28X13X29.3mm重量:17g速度:0.18sec/60"(4.8V)扭⼒:2.5kg:cm(4.8V)——————————————————————————S3002尺⼨:31X16X30.2mm重量:35g速度:0.20sec/60"(4.8V)扭⼒:3.3g:cm(4.8V)——————————————————————————S9252 Digital servo尺⼨:40.5X20X36.6mm重量:50g速度:0.14sec/60"(4.8V)扭⼒:6.6kg:cm(4.8V)——————————————————————————S9101尺⼨:38.5X19.5X34.5mm重量:45g速度:0.16sec/60"(4.8V)扭⼒:3.1kg:cm(4.8V)——————————————————————————S135尺⼨:31X16X29.7mm重量:29.5g速度:0.15sec/60"(4.8V)扭⼒:1.9g:cm(4.8V)——————————————————————————S9102尺⼨:44.7X22.6X26mm重量:46g速度:0.13sec/60"(4.8V)扭⼒:3.6kg:cm(4.8V)——————————————————————————S9202尺⼨:40X20X35.5mm重量:50g速度:0.22sec/60"(4.8V)扭⼒:5.0kg:cm(4.8V)——————————————————————————S9001尺⼨:40.4X19.8X36mm重量:48g速度:0.18sec/60"(6V)扭⼒:5.2kg:cm(6V)——————————————————————————S3802尺⼨:44X23X43mm重量:72g速度:0.56sec/60"扭⼒:11.0kg:cm ——————————————————————————S9602尺⼨:36X15X30.7mm重量:31g速度:0.09sec/60"(4.8V)扭⼒:2.7g:cm(4.8V)——————————————————————————S9203尺⼨:40.5X20X37.5mm重量:53g速度:0.11sec/60"(4.8V)扭⼒:5.5kg:cm(4.8V)——————————————————————————S136G 收腳專⽤尺⼨:45.2X22.7X25.4mm重量:42g速度:0.50sec/60"(4.8V)扭⼒:5.5kg:cm(4.8V)——————————————————————————S3801尺⼨:59.2X28.8X49.8mm重量:107g速度:0.26sec/60"扭⼒:14.0kg:cm ——————————————————————————S9404尺⼨:39X20X37.4mm重量:55g速度:0.11sec/60"扭⼒:5.7kg:cm ——————————————————————————S9204尺⼨:40.5X20X37.5mm重量:53g速度:0.19sec/60"(4.8V)扭⼒:9.5kg:cm(4.8V)——————————————————————————S135C尺⼨:31X16X30.2mm重量:29g速度:0.15sec/60"(4.8V)扭⼒:1.9g:cm(4.8V)——————————————————————————S5301尺⼨:59.2X28.8X49.8mm重量:125g速度:0.23sec/60"扭⼒:21.0kg:cm ——————————————————————————S9402尺⼨:40.5X20X37.4mm重量:55g速度:0.10sec/60"扭⼒:8.0kg:cm ——————————————————————————S3003尺⼨:40.4X19.8X36mm重量:37.2g速度:0.19sec/60"(6V)扭⼒:4.1kg:cm(6V)——————————————————————————S5801尺⼨:46X25X44mm重量:83g速度:0.5sec/60"(7.2V)扭⼒:9.8kg:cm(7.2V)——————————————————————————S3302尺⼨:59.2X28.8X49.8mm重量:103g速度:0.19sec/60"扭⼒:8.0kg:cm。
船用舵机
一、用途与特点RYD—※※—WB型船用人力液压舵机,适用于转舵扭矩不大于5千牛米的小型渔船、货船、舵船、以及机动驳船、交通艇、巡逻艇、救生艇、消防艇、工作艇、旅游艇、轮渡和其它小型船舶。
还可用作船舶应急操舵装置。
RYD—※※—WB型船用人力液压舵机,具有结构紧凑、无噪音、体积小、利于舱室布置等特点。
其操作灵活、工作平稳、安全可靠、具有自锁能力,可使舵角保持稳定,并且减少操作者的劳动强度。
该机之阀件为集成块、管理简单,安装、维修方便。
RYD—※※—WB人力液压舵机符合CCS规定,是小型船舶理想的操舵装置。
二、工作原理当舵角为零时,舵叶停止在图示位置。
当向右转动舵轮8时,从人力液压泵7 左腔排出的液压油,一方面冲开组合阀6左边的单向阀,使油液进入左液压缸4的B腔和右液压缸的C腔,推动舵叶向右偏转,使船向右转弯。
此时,发讯器2将讯号传输给舵角指示器9,舵角指示器9 即显示出相应的舵角。
另一方面,压力油同时作用在液控单向阀6内的控制活塞上,使其向右移动,从而打开右边的单向阀,使左液压缸4的A腔和右液压缸D腔中的油液经液控单向阀6中的右阀孔流回人力液压泵的右腔(此时为泵的吸油腔)当舵轮停止转动后,组合阀6中的左右单向阀由于弹簧作用而复位,将油路锁闭,舵叶即停止在某一所需的角度上,舵角指示器9随着显示出舵角值。
当舵轮向左转时,情况与上述正好相反,舵叶向左偏转,船随之向左转弯。
系统工作时,若由于某种原因使系统压力超过安全阀的调定压力值,安全阀开启溢流,使舵及舵机系统免于损坏。
三、安装与使用(一)安装1、安装前去掉油口堵盖,检查各油管是否畅通。
2、将舵柄与舵杆固定起来。
3、将油缸与舵柄用销轴连接起来,并安装上油杯。
注意:必须使液压缸的放气阀向上。
4、使舵柄处于与液压缸活塞杆的垂直方向,按图示尺寸,将液压缸用液压缸支座固定起来,用地脚螺栓固定在船底板上。
5、用JB1885-77(A)型胶管接头将油缸的油口与组合阀的油口连接起来。
舵机简介
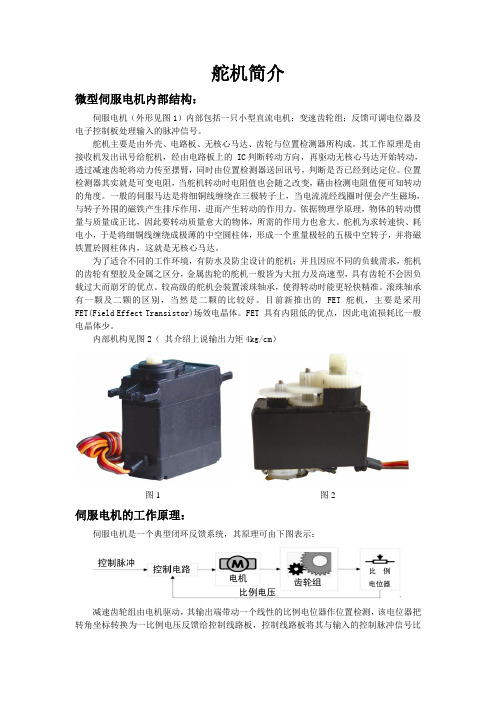
舵机简介微型伺服电机内部结构:伺服电机(外形见图1)内部包括一只小型直流电机;变速齿轮组;反馈可调电位器及电子控制板处理输入的脉冲信号。
舵机主要是由外壳、电路板、无核心马达、齿轮与位置检测器所构成。
其工作原理是由接收机发出讯号给舵机,经由电路板上的 IC判断转动方向,再驱动无核心马达开始转动,透过减速齿轮将动力传至摆臂,同时由位置检测器送回讯号,判断是否已经到达定位。
位置检测器其实就是可变电阻,当舵机转动时电阻值也会随之改变,藉由检测电阻值便可知转动的角度。
一般的伺服马达是将细铜线缠绕在三极转子上,当电流流经线圈时便会产生磁场,与转子外围的磁铁产生排斥作用,进而产生转动的作用力。
依据物理学原理,物体的转动惯量与质量成正比,因此要转动质量愈大的物体,所需的作用力也愈大。
舵机为求转速快、耗电小,于是将细铜线缠绕成极薄的中空圆柱体,形成一个重量极轻的五极中空转子,并将磁铁置於圆柱体内,这就是无核心马达。
为了适合不同的工作环境,有防水及防尘设计的舵机;并且因应不同的负载需求,舵机的齿轮有塑胶及金属之区分,金属齿轮的舵机一般皆为大扭力及高速型,具有齿轮不会因负载过大而崩牙的优点。
较高级的舵机会装置滚珠轴承,使得转动时能更轻快精准。
滚珠轴承有一颗及二颗的区别,当然是二颗的比较好。
目前新推出的 FET 舵机,主要是采用FET(Field Effect Transistor)场效电晶体。
FET 具有内阻低的优点,因此电流损耗比一般电晶体少。
内部机构见图2(其介绍上说输出力矩4kg/cm)图1 图2伺服电机的工作原理:伺服电机是一个典型闭环反馈系统,其原理可由下图表示:减速齿轮组由电机驱动,其输出端带动一个线性的比例电位器作位置检测,该电位器把转角坐标转换为一比例电压反馈给控制线路板,控制线路板将其与输入的控制脉冲信号比较,产生纠正脉冲,并驱动电机正向或反向地转动,使齿轮组的输出位置与期望值相符,令纠正脉冲最终趋于为0,从而达到使伺服电机精确定位的目的。
船用舵机课件
8-1-2-2 水动力矩和转舵扭矩
舵示压。力FN对舵杆轴线所产生的力矩称为舵的水动力矩,用Mα表
Ma
FN X C
(FL cona FD cona) X c
1 2
C
N
Av2
X
c
式中:CN,称为压力系数,其余符号同式(8—1)
转舵扭矩M
操舵装置施加在舵杆上的扭矩
舵匀速转动时,转舵扭矩M即应等于水动力矩Ma和舵各支承处的 总摩擦扭矩Mf 的代数和,即
水作用力F与船舶的重心G并不在同一水平面上
船在转向的同时,还存在着横倾与纵倾力矩
8-1-2-2 转船力矩与最大舵角
转船力矩 (Ms)
Ms
FL (l
X ccon ) FD X c sin
FL l
1 2
Cl
A
v
2
l
式中;l——舵杆轴线至船舶重心的距离
Xc——舵压力中心至舵杆轴线的距离 Ms随舵角α的增大而增大,并在达到某一舵角时出现
8-2-1 泵控型舵机 - 转舵速度
转舵速度:
主要取决于油泵的流量 而与舵杆上的扭矩负荷基本无关
因为舵机油泵都采用容积式泵 当转舵扭矩变化时,虽然工作油压也随之变化,
但泵的流量基本不变,对转舵速度影响不明显
进出港和窄水道航行时,用双泵并联,转舵 速度几乎可提高一倍。
8-2-1 泵控型舵机 - 追随机构
上
浮动杆的位置如图中的实线A1CB1所示。
实际上,浮动杆动作并不分步进行 (C 点偏离中位后,泵就排油)
B1
8-2-1 泵控型舵机 - 回舵
当驾驶台发出回舵指令 时
舵水作用力及其对船的影响
F可分解为与水流方向垂直的升力FL和与水流方向平行的阻力FD,
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
KM-7.5MA (Anlog Servo)KM-7.5M D (Digital Servo)☆ High-Torque Micro Analog Servo for small-sized models ( airplanes, helicopters, cars and boats) ☆ Precision metal gears for smooth action and durability ☆ Good for CCPM (Cylic Collective Pitch Mixing )system ☆ Smooth, Accurate & Reliable!Size (mm)Weight4.8V6VDead BandABCDEgozSpeed (sec/60°) TorqueSpeed sec/60°) Torque0.002msKg.cmOz/inKg.cm Oz/in23.511.620.527.524.5120.420.121.8250.102.129.2KM-08D (Digital Servo)☆ High-Torque Micro Digital Servo for small-sized models ( airplanes, helicopters, cars and boats) ☆ Precision metal gears for smooth action and durability ☆ Good for CCPM (Cylic Collective Pitch Mixing )system ☆ Smooth, Accurate & Reliable!Size (mm)Weight4.8V6VDead BandABCDEgozSpeed (sec/60°) TorqueSpeed sec/60°) Torque0.001 msKg.cmOz/inKg.cm Oz/in23.511.620.527.524.5120.420.102.027.80.082.230.6KM0917A (Analog Servo) ☆ 250 class R/C helicopter head lock servo, full AVCS gyro DS mode compliant ☆ Digital High-speed servo for KM-401/KM-601/ GY401 gyros ☆ High precision plastic gears for smooth action and durability ☆ Good for CCPM (Cylic Collective Pitch Mixing )system ☆ Smooth, Accurate & Reliable!Size (mm)Weight4.8V6VDead BandABCDEgozSpeed (sec/60°) TorqueSpeed sec/60°) Torque0.003msKg.cmOz/inKg.cm Oz/in22.811.620.827.524.580.280.081.419.450.061.622.22KM0917D (Digital Servo) ☆ Analog Servo for small-sized models ( airplanes, helicopters, cars and boats) ☆ High precision plastic gears for smooth action and durability ☆ Good for CCPM (Cylic Collective Pitch Mixing )system ☆ Smooth, Accurate & Reliable!☆ Good for 450 class electric RC helicopters, the same size as tower pro ’s 9g servosSize (mm) Weight4.8V6VDead BandABCDEgozSpeed (sec/60°) TorqueSpeed sec/60°) Torque0.004 msKg.cmOz/inKg.cm Oz/in231223.527.527.690.320.101.723.60.081.926.4KM-09D (Digital Servo)☆ Digital Servo for small-sized models ( airplanes, helicopters, cars and boats) ☆ High precision plastic gears for smooth action and durability ☆ Good for CCPM (Cylic Collective Pitch Mixing )system ☆ Smooth, Accurate & Reliable!☆ Good for 450 class electric RC helicopters, the same size as tower pro ’s 9g servosSize (mm) Weight4.8V6VDead BandABCDEgozSpeed (sec/60°) TorqueSpeed sec/60°) Torque0.003msKg.cmOz/inKg.cm Oz/in231223.527.527.690.320.101.723.60.081.926.4KM0918A (Analog Servo)☆ Digital Servo for small-sized models ( airplanes, helicopters, cars and boats) ☆ High precision plastic gears for smooth action and durability ☆ Good for CCPM (Cylic Collective Pitch Mixing )system ☆ Smooth, Accurate & Reliable!☆ The latest Electronic technology, “ stalling protection” fuction to make your servo more secureSize (mm) Weight4.8VOperating voltageDead BandABCDEgozSpeed (sec/60°) TorqueLess than 5.5V0.002 msKg.cmOz/in23.71221.327.52790.320.101.723.6KM0918D (Digital Servo)☆ Analog Servo for small-sized models ( airplanes, helicopters, cars and boats) ☆ High precision plastic gears for smooth action and durability ☆ Smooth, Accurate & Reliable! ☆ Not recommend for CCPM helicopter ☆ Ultra-Torque performanceSize (mm)Weight4.8V6VDead BandABCDEgozSpeed (sec/60°) TorqueSpeed sec/60°) Torque0.004 msKg.cmOz/inKg.cm Oz/in23.21221.52825.590.320.121.8250.102.129.2KM-15M D (Digital Servo) ☆ Digital Servo for small-sized models ( airplanes, helicopters, cars and boats) ☆ High precision plastic gears for smooth action and durability ☆ Good for CCPM (Cylic Collective Pitch Mixing )system ☆ Smooth, Accurate & Reliable!☆ Ultra-Torque performance, Good for 450 class electric RC helicopters☆ The latest Electronic technology, “ stalling protection” fuction to make your servo more secureSize (mm)Weight4.8V6VDead BandABCDEgozSpeed (sec/60°) TorqueSpeed sec/60°) Torque0.002 msKg.cmOz/inKg.cm Oz/in23.21221.52825.590.320.121.8250.102.129.2KM2525D (Digital Servo)☆ 450 RC helicopter head lock servo, full AVCS gyro DS mode compliant ☆ Digital High-speed servo for KM-401, KM-601, GY401 gyros ☆ High precision plastic gears for smooth action and durability ☆ Good for small scale RC racing cars ☆ Smooth, Accurate & Reliable!Size (mm)Weight4.8V6VDead BandABCDEgozSpeed (sec/60°) TorqueSpeed sec/60°) Torque0.003 msKg.cmOz/inKg.cm Oz/in29.511.8263530170.60.082.636.10.062.940.3KM2530D (Digital Servo) ☆ 450~500 size RC helicopter head lock servo, full AVCS gyro DS mode compliant ☆ Digital High-speed servo for gyro KM-601/KDS800/ GY601 etc ☆ Coreless motor ☆ Dual ball bearings☆ 1 metal gear + 5 plastic gears ☆ Smooth, Accurate & Reliable!☆ Good for CCPM (Cylic Collective Pitch Mixing )system ☆ Aluminium Middle caseSize (mm)Weight4.8V6VDead BandABCDEgozSpeed (sec/60°) TorqueSpeed sec/60°)Torque0.002msKg.cmOz/inKg.cm Oz/in35.614.930.529.319.5250.880.062.534.7KM4804A (Analog Standard Servo)☆ Digital Servo for RC model airplanes, helicopters,cars and boats ☆ High precision gears for smooth action and durability ☆ Dual ball bearings☆ Good for CCPM (Cylic Collective Pitch Mixing )system ☆ Good for 500 size electric RC helicopters.Size (mm)Weight4.8V6VDead BandABCDEgozSpeed (sec/60°) TorqueSpeed sec/60°) Torque0.003 msKg.cmOz/inKg.cm Oz/in31.214.230.532.236250.880.123.244.40.103.650KM4806A (Analog Standard Servo) ☆ Analog High-speed Standard servo for model planes, cars and boats (The same torque as futaba S3003but the speed will be faster)☆ High precision gears for smooth action and durability ☆ Ball bearings☆ Fast, Smooth, Accurate & Reliable!Size (mm)Weight4.8V6VDead BandABCDEgozSpeed (sec/60°) TorqueSpeed sec/60°) Torque0.004 msKg.cmOz/inKg.cm Oz/in40.520.3385010481.70.123.548.60.104.558.3KM5509MA (Analog Servo) ☆ Analog High-speed Standard servo for model planes, cars and boats (The same torque but the speed will befaster)☆ High precision gears for smooth action and durability ☆ Ball bearings☆ Fast, Smooth, Accurate & Reliable!Size (mm)Weight4.8V6VDead BandABCDEgozSpeed (sec/60°) TorqueSpeed sec/60°) Torque0.007 msKg.cmOz/inKg.cm Oz/in40.520.3385010481.70.14569.50.12683.3KM5513MA (Analog Servo)☆ Analog High-speed servo for model planes, cars and boats☆ High precision gears (1 plastic gear + 4 metal gear) for smooth action and durability ☆ Dual ball bearings☆ Fast, Smooth, Accurate & Reliable! ☆ Good for 10:1, 8:1 scale RC racing carsSize (mm) Weight4.8V6VDead BandABCDEgozSpeed (sec/60°) TorqueSpeed sec/60°) Torque0.004 msKg.cmOz/inKg.cm Oz/in40.520.3385010551.940.138.7120.80.119.6133.3KM5515MA (Analog Servo) ☆ Analog High-Torque servo for model planes, cars and boats☆ High precision gears (1 plastic gear + 4 metal gear) for smooth action and durability ☆ Dual ball bearings☆ Fast, Smooth, Accurate & Reliable! ☆ Good for scale RC racing carsSize (mm)Weight4.8V6VDead BandABCDEgozSpeed (sec/60°) TorqueSpeed sec/60°) Torque0.004 msKg.cmOz/inKg.cm Oz/in40.520.3385010551.940.1511.5159.70.1313180.6KM5520MA (Analog Servo) ☆ Analog High-Torque servo for model planes, cars and boats☆ High precision gears (1 plastic gear + 4 metal gear) for smooth action and durability ☆ Dual ball bearings☆ Fast, Smooth, Accurate & Reliable! ☆ Good for scale RC racing carsSize (mm)Weight4.8V6VDead BandABCDEgozSpeed (sec/60°) TorqueSpeed sec/60°) Torque0.004 msKg.cmOz/inKg.cm Oz/in40.520.3385010551.940.2213.5187.50.2015.5215.3KM5509MD (Digital Servo) ☆ Analog High-Torque servo for model planes, cars and boats☆ High precision gears (1 plastic gear + 4 metal gear) for smooth action and durability ☆ Dual ball bearings☆ Fast, Smooth, Accurate & Reliable! ☆ Good for scale RC racing carsSize (mm)Weight4.8V6VDead BandABCDEgozSpeed (sec/60°) TorqueSpeed sec/60°) Torque0.004msKg.cmOz/inKg.cm Oz/in40.520.3385010551.940.22182500.2021291.7KM5513MD (Digital Servo)☆ Digital High-speed servo for model cars, helicopters, airplanes☆ High precision gears(1 plastic gear + 4 metal gear) for smooth action and durability ☆ Dual ball bearings ☆ Coreless motor☆ Good for 50 class RC helicopters and scale 1:8, 1:10 RC cars.Size (mm) Weight4.8V6VDead BandABCDEgozSpeed (sec/60°) TorqueSpeed sec/60°) Torque0.003 msKg.cmOz/inKg.cm Oz/in40.520.3385010551.940.1291250.1010138.9KM5507MD (Digital Servo)☆ Digital High-speed servo for model cars, helicopters, airplanes☆ High precision gears(1 plastic gear + 4 metal gear) for smooth action and durability ☆ Dual ball bearings ☆ Coreless motor ☆ Good for scale RC carsSize (mm) Weight4.8V6VDead BandABCDEgozSpeed (sec/60°) TorqueSpeed sec/60°) Torque0.003 msKg.cmOz/inKg.cm Oz/in40.520.3385010551.940.1311.5159.70.1113180.6KM5510MD (Digital Servo) ☆ Head lock servo for 50~90 class R/C helicopter, full AVCS gyro DS mode compliant ☆ Digital High-speed/ High-torque servo☆ High precision gears(1 plastic gear + 4 metal gear) for smooth action and durability ☆ Dual ball bearings ☆ Coreless motor ☆ Aluminium Middle caseSize (mm)Weight4.8V6VDead BandABCDEgozSpeed (sec/60°) TorqueSpeed sec/60°) Torque0.001msKg.cmOz/inKg.cm Oz/in40.520.333.55010541.910.085.576.40.06683.3KM5514MD (Digital Servo)☆ Digital High-speed/High-Torque servo for model cars, helicopters, airplanes ☆ High precision gears(1 plastic gear + 4 metal gear) for smooth action and durability ☆ Dual ball bearings ☆ Coreless motor☆ Good for 50 class RC helicopters and scale RC cars. ☆ Aluminium Middle caseSize (mm)Weight4.8V6VDead BandABCDEgozSpeed (sec/60°) TorqueSpeed sec/60°) Torque0.001msKg.cmOz/inKg.cm Oz/in40.520.333.55010541.910.1091250.0810138.9KM7009MD (Digital Servo)☆ Digital High-speed/High-Torque servo for model cars, helicopters, airplanes ☆ High precision gears(1 plastic gear + 4 metal gear) for smooth action and durability ☆ Dual ball bearings ☆ Coreless motor ☆ Good for scale RC cars. ☆ Aluminium Middle caseSize (mm)Weight4.8V6VDead BandABCDEgozSpeed (sec/60°) TorqueSpeed sec/60°) Torque0.001 msKg.cmOz/inKg.cm Oz/in40.520.333.55010541.910.1311.5159.70.1113180.6KM7013MD (Digital Servo)☆ Digital High-speed Advanced servo for model cars, helicopters, airplanes ☆ All metal (Aluminium) main structure☆ High precision metal gears(made in Taiwan) for smooth action and durability ☆ Dual ball bearings ☆ Coreless motorSize (mm)Weight4.8V6VDead BandABCDEgozSpeed (sec/60°) TorqueSpeed sec/60°) Torque0.001msKg.cmOz/inKg.cm Oz/in40.520.3365010702.470.1091250.0810138.9KM7021MD (Digital Servo)☆ High-speed/High-torque Advanced servo ☆ All metal (Aluminium) main structure☆ High precision metal gears(made in Taiwan) for smooth action and durability ☆ Dual ball bearings ☆ Coreless motorSize (mm)Weight4.8V6VDead BandABCDEgozSpeed (sec/60°) TorqueSpeed sec/60°) Torque0.001msKg.cmOz/inKg.cm Oz/in40.520.3365010702.470.0812.5173.60.0613.5187.5☆High-torque Advanced servo☆All metal (Aluminium) main structure☆High precision metal gears(made in Taiwan) for smooth action and durability ☆Dual ball bearings☆Coreless motorSize (mm) Weight 4.8V 6V Dead BandA B C D E g ozSpeed(sec/60°)TorqueSpeedsec/60°)Torque0.001ms Kg.cm Oz/in Kg.cm Oz/in40.5 20.3 36 50 10 70 2.47 0.16 18 250 0.14 21 291.7。