挖掘机器人铲斗目标图像的改进分水岭分割_王福斌
《基于机器视觉挖掘机工作装置姿态识别与目标定位》范文
《基于机器视觉挖掘机工作装置姿态识别与目标定位》篇一一、引言随着科技的进步,机器视觉在工程机械领域的应用越来越广泛。
其中,挖掘机作为典型的工程机械之一,其工作装置的姿态识别与目标定位技术对于提高工作效率和安全性具有重要意义。
本文旨在研究基于机器视觉的挖掘机工作装置姿态识别与目标定位技术,以提高挖掘机的工作效率和安全性。
二、挖掘机工作装置姿态识别挖掘机工作装置姿态识别是机器视觉技术在工程机械领域的重要应用之一。
通过对挖掘机工作装置的图像进行采集、处理和分析,可以实现对工作装置的姿态识别。
首先,我们需要利用高精度的摄像头对挖掘机工作装置进行实时监控和图像采集。
然后,通过图像处理技术,如边缘检测、特征提取等,对采集到的图像进行处理和分析,提取出工作装置的关键特征信息。
接着,利用机器学习算法和模式识别技术,对提取出的特征信息进行分类和识别,从而实现对工作装置的姿态识别。
在挖掘机工作装置姿态识别的过程中,我们需要考虑多种因素,如光照条件、背景干扰、图像分辨率等。
因此,我们需要采用先进的图像处理算法和机器学习模型,以提高姿态识别的准确性和稳定性。
三、目标定位技术目标定位技术是挖掘机作业中另一个重要的技术。
通过机器视觉技术对作业环境进行实时监测和目标定位,可以提高挖掘机的工作效率和安全性。
在目标定位过程中,我们需要利用摄像头对作业环境进行实时监控和图像采集。
然后,通过图像处理技术和计算机视觉算法,对采集到的图像进行处理和分析,提取出目标物体的特征信息。
接着,利用目标跟踪算法和路径规划技术,实现对目标的精确定位和跟踪。
为了提高目标定位的准确性和稳定性,我们需要采用高精度的摄像头和图像处理算法。
同时,我们还需要考虑多种因素,如目标物体的形状、大小、颜色、位置等,以及环境因素如光照条件、背景干扰等。
因此,我们需要设计更加智能化的算法和模型,以应对各种复杂的情况。
四、应用实例以某大型工地为例,我们采用基于机器视觉的挖掘机工作装置姿态识别与目标定位技术,对挖掘机的工作过程进行实时监测和控制。
正铲液压挖掘机挖掘性能图谱叠加分析法
关键词 ; 正铲液压挖掘机 叠加法 图谱 分析 性 能 优化 中 图分 类 号 : U T 6 文 献 标 识 码 : A 我 国挖 掘 机 的 生 产 是 开 始 于 2 世 纪 5 0 0 年 代 , 一 台传 统 正 铲 挖 掘 机 于 1 5 年 成 第 94 功 制 造 。 国 是 一 个 发 展 中 国 家 , 幅 员辽 我 且 阔 , 这 么 广 阔 的 土 地 上 大 规 模 的 建 设 就 在 需 要 大 量 的 土 石 方 机 器 为 其 服 务 , 正 铲 而 液 压 挖 掘 机是 这 类 工 作 的 主 要 工具 。 以 , 所 生 产 高 性 能 的 挖 掘 机 是 经 济 发 展 的 不 可 缺 少的一 部分 。 正铲 液 压 挖 掘 机 是 工 程 机 械 应 用 的 一 种 主 要 类 型 , 常 工 作 对 象 是 爆 破 后 的 岩 通 石 、 石 等 。 作 环 境 相 对 比 较 恶 劣 , 泛 矿 工 广 的应用于修 路 、 屋建 设 、 建水 利、 口 房 兴 港 建设、 农林 开发 、 国防 工事 等 方面 的 矿 山采 掘 或 者 是 土 石 方 施 工 。 以 在 对 正 铲 液 压 所 挖 掘 机 的性 能 方 面 要 求 越 来 越 高 , 文 就 本 针 对 此 问题 进 行 了研 究 。
工 业 技 术 SIC C ຫໍສະໝຸດ E&TCNL0 E EHOO Y.
皿圆
正 铲 液 压 挖 掘 机 挖 掘 性 能 图谱 叠 加分 析 法
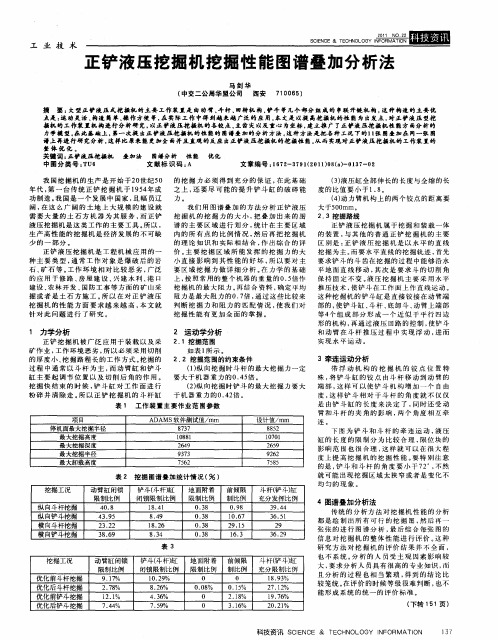
马 剑 华 ( 中交二公 局华盟 公司 西安 7 0 5 1 6) 0 摘 要: 大型正 铲液 压式挖 掘机 的 主要 工作装 置是 由 动臂 、 斗杆 . 田转 机 构 , 铲斗 等几个 部分 组成 的 串联 开链 机构 , 这种 构造 的主要 优 点是 : 动灵活 , 运 构遣 简单 , 操作 方便 等 , 在实 际工作 中得 到越来 越 广泛 的应 用。 本文是 以提 高挖掘机 的性 能 为出发 点, 正铲液 压型挖 对 掘机 的工作装 王机 构进行 分析研 究 , 以正铲液 压挖 掘机 的各饺 点, 豆齿 尖 以及 重心 为坐标 , 建立推 广 了正 铲液 压挖 掘机性 能方 面分析 的
农用挖掘机铲斗机构的多体运动学与动力学研究

ห้องสมุดไป่ตู้
农 机 化 研 究
第 5期
农 用 挖 掘 机 铲 斗 机 构 的 多 体 运 动 学 与 动 力 学 研 究
樊 建 荣 , 吕新 民 ,林 伟 ,谯坤 华
720 1 1 0)
( 北 农 林 科 技 大 学 机 械 与 电子 工 程学 院 ,陕 西 杨凌 西 摘
要 : 农 用 液 压 挖 掘 机 的工 作 装 置 有 其 特殊 性 , 铲 斗 机 构是 其 重 要 的 组 成 部 分 。 由于 农 用 挖 掘 机 工 作 时 主 而
= sn r = 2, , c = c s r = 2, , s+ = i0 , … 6; o0, … 6; ,t
收 稿 日期 :2 0 0 0 8— 7—2 4
基金 项 目:陕西 省科学技术研 究发展计 划项 目( 0 3 0 2 0 K 3一G 9一O ) 1
作 者简介 :樊建 荣 ( 9 9一) 男 , 西扶 风 人 , 17 , 陕 在读 硕 士 , E—m 1 ( m)
0 引 言
农用 挖 掘 机 主 要 用 于农 田水 利 工 程 、 型 基 建 、 小 公 路 建设 工 程 、 自来 水 管道 修 建 、 厂 、 石 料 厂 的作 砖 砂 业 以及各 种 形 式 的农 活 , 用 范 围非 常 广 泛 。 目前 市 使 场 上 销售 的农 用液 压 挖 掘 机 大 多 为 轮 式 , 工 作 装 置 其 采 用 反铲 的较 多 , 造 特 点 是 铰 接 式 , 般 是 将 通 用 构 一
35~4 5 , 多 用 于 分 散 性 强 、 业 量 小 的 土 方 挖 . . t大 作 掘 J 。农用 挖 掘 机 以铲 斗 挖 掘 为 主 , 斗 容量 小 和 整 在 机 质 量小 的情 况下 , 斗 机 构 的运 动 学 和 动力 学 的 特 铲 殊 规 律有 待 探 明 。农 用 液 压 挖 掘 机 铲 斗 机 构 由 1个 摆 臂 油缸 和 1 铰 链 四连 杆 机 构 串 联 而 成 , 1个 平 个 是
一种基于改进DeepLabV3+网络的机械零部件图像分割算法[发明专利]
![一种基于改进DeepLabV3+网络的机械零部件图像分割算法[发明专利]](https://img.taocdn.com/s3/m/d1d9df1182c4bb4cf7ec4afe04a1b0717fd5b3c8.png)
专利名称:一种基于改进DeepLabV3+网络的机械零部件图像分割算法
专利类型:发明专利
发明人:付生鹏,侯维广,夏仁波,赵吉宾,孙海涛,张诚
申请号:CN202210184465.1
申请日:20220225
公开号:CN114627290A
公开日:
20220614
专利内容由知识产权出版社提供
摘要:本发明涉及一种基于改进DeepLabV3+网络的机械零部件图像分割算法。
包括:首先,在主干网络中引入注意力机制来提升有效特征信息的重要性,增强对零部件目标的学习能力。
其次,增加底层特征来源以充分利用特征融合分支进行自适应学习低级特征的空间信息,并且将原4倍上采样操作分解为逐层上采样,减少了重要像素信息的丢失。
最后,使用不对称卷积来增强解码层中3×3卷积的核骨架部分,提高了卷积核的处理能力以及模型精度。
本发明方法实现了对零部件图像中的零部件区域的准确分割,有效弥补了传统DeepLabV3+对零部件图像分割时存在边缘分割模糊、不完全分割的问题,同时具有一定的实时性,提升工业化效率。
申请人:中国科学院沈阳自动化研究所,沈阳智能机器人创新中心有限公司,沈阳智能机器人国家研究院有限公司
地址:110016 辽宁省沈阳市沈河区南塔街114号
国籍:CN
代理机构:沈阳科苑专利商标代理有限公司
代理人:周宇
更多信息请下载全文后查看。
苹果图像的背景分割与目标提取
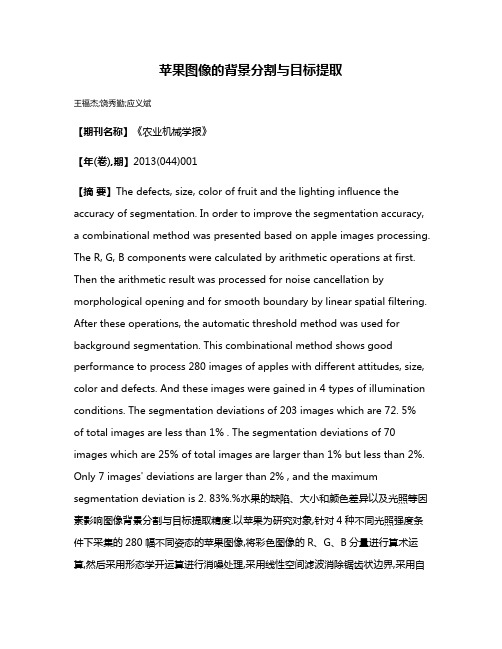
苹果图像的背景分割与目标提取王福杰;饶秀勤;应义斌【期刊名称】《农业机械学报》【年(卷),期】2013(044)001【摘要】The defects, size, color of fruit and the lighting influence the accuracy of segmentation. In order to improve the segmentation accuracy, a combinational method was presented based on apple images processing. The R, G, B components were calculated by arithmetic operations at first. Then the arithmetic result was processed for noise cancellation by morphological opening and for smooth boundary by linear spatial filtering. After these operations, the automatic threshold method was used for background segmentation. This combinational method shows good performance to process 280 images of apples with different attitudes, size, color and defects. And these images were gained in 4 types of illumination conditions. The segmentation deviations of 203 images which are 72. 5%of total images are less than 1% . The segmentation deviations of 70 images which are 25% of total images are larger than 1% but less than 2%. Only 7 images' deviations are larger than 2% , and the maximum segmentation deviation is 2. 83%.%水果的缺陷、大小和颜色差异以及光照等因素影响图像背景分割与目标提取精度.以苹果为研究对象,针对4种不同光照强度条件下采集的280幅不同姿态的苹果图像,将彩色图像的R、G、B分量进行算术运算,然后采用形态学开运算进行消噪处理,采用线性空间滤波消除锯齿状边界,采用自动阈值分割方法进行背景分割与目标提取.结果显示,203幅图像的分割偏差小于1%,占总量的72.5%;70幅图像的分割偏差大于1%而小于2%,占总量的25%;偏差大于2%的有7幅,占总量的2.5%.最大分割偏差为2.83%.【总页数】5页(P196-199,210)【作者】王福杰;饶秀勤;应义斌【作者单位】浙江大学生物系统工程与食品科学学院,杭州310058;中北大学机械工程与自动化学院,太原030051;浙江大学生物系统工程与食品科学学院,杭州310058;浙江大学生物系统工程与食品科学学院,杭州310058【正文语种】中文【中图分类】TP391.41【相关文献】1.基于顶帽-底帽变换和二次图像分割的目标提取 [J], 杨漫2.相似背景下的苹果图像分割方法仿真研究 [J], 王丽3.基于图像分割的无人机遥感影像目标提取技术 [J], 赵一粟4.基于图像分割的无人机遥感影像目标提取技术 [J], 赵一粟5.基于图像分割与目标提取的舰船遥感影像分析技术 [J], 邓剑勋因版权原因,仅展示原文概要,查看原文内容请购买。
基于SolidWorks的挖掘机铲斗分析与优化设计
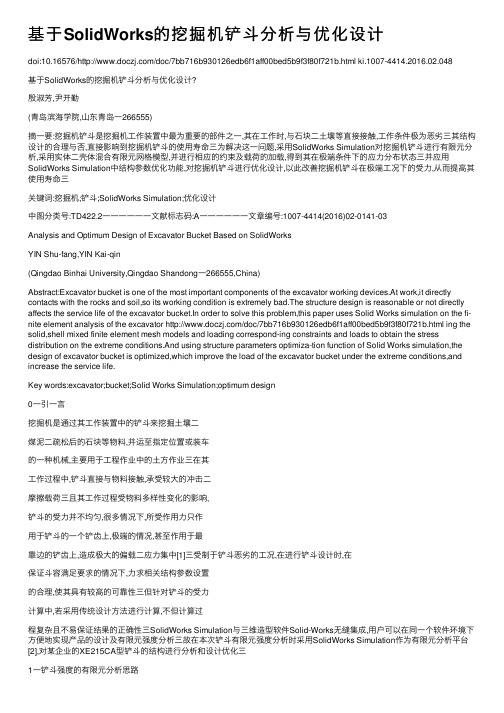
基于SolidWorks的挖掘机铲⽃分析与优化设计doi:10.16576//doc/7bb716b930126edb6f1aff00bed5b9f3f80f721b.html ki.1007-4414.2016.02.048基于SolidWorks的挖掘机铲⽃分析与优化设计?殷淑芳,尹开勤(青岛滨海学院,⼭东青岛⼀266555)摘⼀要:挖掘机铲⽃是挖掘机⼯作装置中最为重要的部件之⼀,其在⼯作时,与⽯块⼆⼟壤等直接接触,⼯作条件极为恶劣三其结构设计的合理与否,直接影响到挖掘机铲⽃的使⽤寿命三为解决这⼀问题,采⽤SolidWorks Simulation对挖掘机铲⽃进⾏有限元分析,采⽤实体⼆壳体混合有限元⽹格模型,并进⾏相应的约束及载荷的加载,得到其在极端条件下的应⼒分布状态三并应⽤SolidWorks Simulation中结构参数优化功能,对挖掘机铲⽃进⾏优化设计,以此改善挖掘机铲⽃在极端⼯况下的受⼒,从⽽提⾼其使⽤寿命三关键词:挖掘机;铲⽃;SolidWorks Simulation;优化设计中图分类号:TD422.2⼀⼀⼀⼀⼀⼀⽂献标志码:A⼀⼀⼀⼀⼀⼀⽂章编号:1007-4414(2016)02-0141-03Analysis and Optimum Design of Excavator Bucket Based on SolidWorksYIN Shu-fang,YIN Kai-qin(Qingdao Binhai University,Qingdao Shandong⼀266555,China)Abstract:Excavator bucket is one of the most important components of the excavator working devices.At work,it directly contacts with the rocks and soil,so its working condition is extremely bad.The structure design is reasonable or not directly affects the service life of the excavator bucket.In order to solve this problem,this paper uses Solid Works simulation on the fi-nite element analysis of the excavator /doc/7bb716b930126edb6f1aff00bed5b9f3f80f721b.html ing the solid,shell mixed finite element mesh models and loading correspond-ing constraints and loads to obtain the stress distribution on the extreme conditions.And using structure parameters optimiza-tion function of Solid Works simulation,the design of excavator bucket is optimized,which improve the load of the excavator bucket under the extreme conditions,and increase the service life.Key words:excavator;bucket;Solid Works Simulation;optimum design0⼀引⼀⾔挖掘机是通过其⼯作装置中的铲⽃来挖掘⼟壤⼆煤泥⼆疏松后的⽯块等物料,并运⾄指定位置或装车的⼀种机械,主要⽤于⼯程作业中的⼟⽅作业三在其⼯作过程中,铲⽃直接与物料接触,承受较⼤的冲击⼆摩擦载荷三且其⼯作过程受物料多样性变化的影响,铲⽃的受⼒并不均匀,很多情况下,所受作⽤⼒只作⽤于铲⽃的⼀个铲齿上,极端的情况,甚⾄作⽤于最靠边的铲齿上,造成极⼤的偏载⼆应⼒集中[1]三受制于铲⽃恶劣的⼯况,在进⾏铲⽃设计时,在保证⽃容满⾜要求的情况下,⼒求相关结构参数设置的合理,使其具有较⾼的可靠性三但针对铲⽃的受⼒计算中,若采⽤传统设计⽅法进⾏计算,不但计算过程复杂且不易保证结果的正确性三SolidWorks Simulation与三维造型软件Solid-Works⽆缝集成,⽤户可以在同⼀个软件环境下⽅便地实现产品的设计及有限元强度分析三故在本次铲⽃有限元强度分析时采⽤SolidWorks Simulation作为有限元分析平台[2],对某企业的XE215CA型铲⽃的结构进⾏分析和设计优化三1⼀铲⽃强度的有限元分析思路在常规的结构件应⽤有限元分析软件进⾏计算时,通常⾸先根据结构件的结构特点,建⽴有限元分析所需的模型;根据结构件所⽤的材料建⽴材料模型;然后根据结构件的⼯作情况确定相应的载荷及约束,并划分⽹格;最后运⾏求解三由于铲⽃的⼯作时,作业情况复杂,并且需要对结构参数进⾏优化,如果仅按常规的分析思路进⾏有限元的分析求解,则会造成分析过程反复,分析效率低下三2⼀铲⽃结构分析铲⽃结构如图1所⽰,其⼀般由⽃壁⼆⽃底⼆⽿板⼆⽃齿及⽃⾓等组成三主要设计数据有⽃底板厚度⼆⽿板厚度⼆⽃壁厚度⼆⽃⾓厚度⼆背板厚度⼆⽿板间距⼆⽃⾓长⼆⽃⾓宽及⽃⾓圆弧半径,通过强度分析,对其设计数据进⾏优化设计三由铲⽃的结构可知,构成铲⽃主要结构的⽃壁⼆⽃底⼆⽿板均由钢板加⼯后经焊接⽽成三⽃壁⼆⽃底四机械研究与应⽤四2016年第2期(第29卷,总第142期)⼀⼀⼀⼀⼀⼀⼀⼀⼀⼀⼀⼀⼀⼀⼀⼀⼀⼀设计与制造收稿⽇期:2016-02-19作者简介:殷淑芳(1972-),⼥,⼭东青岛⼈,硕⼠,⾼级⼯程师,主要从事产品开发⽅⾯的⼯作三钢板厚度相对于其余两个⽅向的尺⼨数值较⼩三针对这种情况如果在有限元分析中,⽃壁⼆⽃底依然采⽤实体单元进⾏分析,为保证分析结果的准确性,必须在板厚⽅向划分不少于两层的单元⽹格三以⽃容为0.9m3铲⽃为例,⽃壁⼆⽃底所采⽤的钢板板厚⼀般在20~30mm,⽽其连长可在960mm左右,由此可知⽹格的划分数量将在⼗万以上,将会⼤⼤增加分析的规模,从⽽降低有限元分析速度三这个现象在优化设计将更为明显,因为在优化分析计算时,为得到最优的结果,有限元分析软件会针对所分析的⼯况,根据可变的参数范围,⽣成数以百计的样本点,并对这些样本点逐⼀求解三为解决⼀问题,针对⽃壁⼆⽃底⼆⽿板等板类结构,在三维建模时,采⽤曲⾯建模,在有限元求解时,应⽤壳体⽹格单元划分,并定义相应厚度三采⽤这种⽅式,由于没有了厚度尺⼨的限制,在满⾜精度要求的条件下,⽹格单元尺⼨可以设置的⼤⼀些,由此可极⼤的减少⽹格单元数量,缩减分析规模,从⽽提⾼分析速度三⽽铲齿等结构件,仍采⽤实体模型建模;为简化模型,铲⽃中对结构强度不产⽣影响的孔等结构不再体现在有限元分析模型中,最终确定分析模型如图2所⽰[3]三⼀图1⼀铲⽃外形图图2⼀铲⽃有限元分析模型⼀⼀在铲⽃的分析模型建⽴之时,需同时根据铲⽃结构可优化参数,以便在后续结构优化设计中应⽤三根据铲⽃结构特点,可优化结构尺⼨有⽃底⼆⽃壁⼆⽿板的板厚,⽃⾓的外形尺⼨(长⼆宽⼆圆弧半径),两⽿板的间距等三根据SolidWorks Simulation软件特点,相关参数的设置及与分析模型的链接可在其软件环境中参数对话框下设置三在设置时,需为相应的参数设置对应的名称,此次分析以⽃容为0.9m3铲⽃为例,取⽃底板厚参数为aa,⽿板厚度尺⼨参数为bb,⽃壁厚度参数为cc,⽃⾓的厚度参数为dd,背板的厚度为ee,⽿板间距参数为ff,⽃⾓的长⼆宽⼆圆弧半径参数分别为为gg⼆hh⼆ii三具体数值见表1三由有限元分析的相关要求可知,在进⾏铲⽃的强度分析时,必须要知道材质的弹性模量⼆泊松⽐等参锰耐磨钢等,这个钢材的弹性模量与泊松⽐基本⼀致,在分析时,铲⽃各构件材质的弹性模量为2.11?1011Pa,泊松⽐取0.28三表1⼀有限元分析参数表设计参数参数初始⽃底板厚aa30⽿板厚度bb30⽃壁厚度cc25⽃⾓厚度dd16背板厚度ee20⽿板间距ff400⽃⾓长gg120⽃⾓宽hh20⽃⾓圆弧半径ii503⼀确定载荷由于挖掘机⼯作时⼯况的多样性,作⽤于铲⽃的载荷并不易于确定三因为挖掘机在实际⼯作过程中,铲⽃铲齿不断受物料中的切削阻⼒⼆物料与铲齿间的摩擦⼒及物料进⼊铲⽃后的挤压作⽤⼒,铲⽃各个铲齿所受作⽤⼒的⼯况是随机的三且本⽂旨在求解铲⽃在极端应⼒下的应⼒响应,故在载荷设置时取挖掘机标定的最⼤载荷三因挖掘机在⼯作时,载荷在铲⽃的分布并不均匀,在少数时候甚⾄会有极端的情况出现三故在载荷加载,将载荷全部加载在其中的⼀个铲齿上,并在每个算例中依次选取居中⼆靠边⼆最边的铲齿作为施加载荷的位置三载荷⽅向与铲⽃铲齿尖绕铲⽃铰轴回转时形成的弧形运动轨迹相切三所加载载荷的⼤⼩按单独操作铲⽃液压缸或⽃杆液压缸时在铲⽃铲齿尖上所产⽣的实际作⽤⼒,本次所分析国内挖掘机型号:XE215CA,最⼤挖掘⼒为149kN三4⼀接触条件的设置由于铲⽃并不是⼀个整体结构,⽽是⼀系列构件组成的集合体,且采⽤了不同⽹格类型,故在分析前必须设置相应的接触条件,以便准确地求解分析三由铲⽃结构可知,⽃壁与⽃底⼆⽃壁与背板⼆背板与⽃底⼆⽿板与⽃底⼆背板之间⼆⽃⾓与⽃壁通过焊缝连接,铲齿与⽃底之间通过螺栓连接[4]三在Solid-Works Simulation中,焊缝等钢性连接,⼀般通过接触对象间的连接对象间的接合来处理三对于铲齿与⽃底间的螺栓连接,由于在之前铲⽃分析模型建⽴时,为缩⼩分析规模,连接所⽤的螺栓孔并未体现在模型中,故⼆者之间的连接仍采⽤接合来处理,对设计与制造⼀⼀⼀⼀⼀⼀⼀⼀⼀⼀⼀⼀⼀⼀⼀⼀⼀⼀2016年第2期(第29卷,总第142期)四机械研究与应⽤四5⼀后处理在铲⽃材料⼆连接⼆约束及载荷设置完成之后,在运⾏分析之前,需对其进⾏⽹格划分三⽹格划分的合适与否,对计算结果有着决定性的影响,在本次强度分析时,取⽹格单元⼤⼩为42mm,公差为2.1mm,并选择⾃动过渡选项三⽣成⽹格之后,可得结果如表2所⽰三表2⼀⽹格划分结果⽹格划分选项⽹格划分结果⽹格类型混合⽹格(包含壳体单元及实体单元)所⽤⽹格器标准⽹格⾃动过渡打开雅可⽐点4点单元⼤⼩42mm 公差 2.1mm ⽹格品质⾼节点数14732单元总数7013前处理设置完成后,即可进⾏算例的求解,便可得到载荷作⽤⼒分别作⽤于铲齿居中⼆靠边⼆最边三个位置的应⼒图解,如图3所⽰三图3⼀应⼒云图⼀⼀由图3可知,在载荷作⽤于居中的铲齿时,整个铲⽃的应⼒呈对称分布,应⼒最⼤值为150.643MPa,发⽣在两⽿板与⽃底的连接处三当载荷作⽤于靠边的铲齿时,铲⽃的应⼒分布便不再均匀,且最⼤应⼒值增⼤到245.412MPa三当载荷作⽤于最边的铲齿时,铲⽃的受⼒状况更为恶劣,并且其最⼤应⼒达到了了298.441MPa,已接近铲⽃所⽤材料16Mn 的屈服点(其值为345MPa)三由三种⼯况的对⽐分析可知,当铲⽃有偏载作⽤时,其受⼒状况便会急剧恶化三尤其在最边铲齿时,这种情况更为明显三铲⽃的相关结构件的安全系数,⼀般取2.0~2.5,但通过分析,当加载载荷偏载时,铲⽃的结构强度明显不符合要求故需要进⾏设计优化三6⼀设计优化在有限元分析软件中,若要进⾏结构参数优化设计,必须⾸先选定基础分析算例,再设定所需优化参数的取值范围,然后设定⽬标值及相关的约束信息三在SolidWorks Simulation 中,结构参数优化设计通过设计算例来实现三基础分析算例选择载荷加载于最边铲齿时的⼯况三各参数的取值范围见表3三表3⼀各参数取值范围参数类型数值/mm aa范围最⼩:20最⼤:40bb 范围最⼩:20最⼤:40cc 范围最⼩:20最⼤:30dd 范围最⼩:8最⼤:25ee 范围最⼩:15最⼤:30ff 范围最⼩:180最⼤:300gg 范围最⼩:100最⼤:180hh范围最⼩:15最⼤:35ii 范围最⼩:30最⼤:75SolidWorks Simulation 优化分析中,⽬标约束的设置⽅式与其它⼀些专⽤的有限元分析软件(如AN-SYS)不同,它是通过添加传感器的⽅式来实现的三在本次分析中,取铲⽃各构件安全系数为2.4(即许⽤应⼒为143.75MPa),并以此为约束进⾏优化计算三运⾏分析后可得优化结果如表4所⽰三表4⼀优化设计结果设计参数参数优化值⽃底板厚aa 30⽿板厚度bb 40⽃壁厚度cc 25⽃⾓厚度dd 16.5背板厚度ee 30⽿板间距ff 480⽃⾓长gg 140⽃⾓宽hh 15⽃⾓圆弧半径ii52.5根据表4优化设计结果,对铲⽃分析模型进⾏参数修改并运⾏分析,可其应⼒云图如图4所⽰三由图4可知,优化后的铲⽃所受应⼒得到了较为明显的改善,在载荷加载⾄最边铲齿时,最⼤应⼒仅为141.73MPa三(下转第147页)图6⼀⽬标函数图7⼀设计变量4⼀结⼀语(1)⽤APDL 语⾔建⽴的建模程序,可快速有效地对各种规格的载重车车轮建⽴有限元模型三(2)根据弯曲疲劳试验建⽴等效⼒学模型,试验结果和等效⼒学模型建⽴的有限元分析结果是较为符合的三⼀⼀(3)根据验证的等效⼒学模型对车轮进⾏优化设计,在保证轮辐厚度不变的情况下,通过改变轮辐形状和各种孔的位置和形状尺⼨(保证安装尺⼨),使危险点的最⼤应⼒降低了11.52%,从⽽提⾼车轮的载重量寿命三参考⽂献:[1]⼀Risener M,DeVries R I.Finite element analysis and structural opti-mization of vechicle wheels[M].SAE technical paper 830133.War-rendale,Pennsylvana,USA:Soc -Iety of Auto -motive Engineer,Inc,1983.[2]⼀John C.Stearns.An Investigation of Stress and Displacement Distri-bution in a Aluminu -m Alloy Automobile Rim[M].A Thesis of TheUniversity of Akron,2000.[3]⼀催胜明.汽车车轮疲劳寿命预测⽅法的研究[J].机械强度,2002,24(4):617-619.[4]⼀李⼀冰,耿雪霄.汽车钢圈疲劳寿命的有限元分析[J].机械设计与制造,2011,7(1):2-4.[5]⼀张⼀宁.铝合⾦轮毂受⼒状态的有限元分析与优化设计[D].重庆:重庆⼤学,2010.[6]⼀刘新宇.汽车钢圈疲劳分析与寿命估算⽅法研究[D].南宁:⼴西⼤学,2007.[7]⼀郗彦辉.铝合⾦车轮的结构分析及优化[D].天津:河北⼯业⼤学,2003.[8]⼀王周军.铝合⾦汽车轮的强度分析及优化[D].天津:河北⼯业⼤学,2004.[9]⼀Risener M,DeVries R I.Finite element analysis and structural opti-mization of vechicle wheels.SAE technical paper 830133[M].War-rendale,Pennsylvana,USA.Soc -Iety of Auto -motive Engineer,Inc,1983.[10]⼀Dally J W,Riley W F.Experimental stree analyse.2nd ed[M].NewYork,USA:McGraw -Hill,Inc,1978.(上接第143页)图4⼀修改后的应⼒云图7⼀结⼀语通过应⽤SolidWorks Simulation 对铲⽃强度的有限元分析,求解出了铲⽃在不同⼯况下的应⼒响应,⽽且通过软件的参数优化功能,求解出了符合设计要求的最优设计结果三提⾼铲⽃设计的可靠性还极⼤地提⾼了设计效率三参考⽂献:[1]⼀周⼀⽂,任⼩鸿,李林鑫,等.基于SolidWorks 的牵引式挖掘机设计及有限元分析[J].中国农机化学报,2013(5):146-149.[2]⼀胡⼀燊,程海帆,许平娟,等.SolidWorks 进⾏CAE 分析的⼏种⽅法[J].煤炭技术,2010(1):13-15.[3]⼀邓宏光,郑⼀⽂,游思坤.基于Pro /E Mechanism 的挖掘机⼯作装置动⼒学分析[J].煤矿机械,2010(3):102-103.[4]⼀李⾸先,朱永胜,⾼利芳.基于Simulation 的VOLVO220铲⽃强度分析及优化设计[J].港⼝科技,2014(9):24-26.。
线结构光条纹中心亚像素自适应提取算法

第45卷 第3期2021年5月激 光 技 术LASERTECHNOLOGYVol.45,No.3May,2021 文章编号:1001 3806(2021)03 0350 07线结构光条纹中心亚像素自适应提取算法王福斌,刘贺飞,王 蕊,曾 凯(华北理工大学电气工程学院自动化系,唐山063210)摘要:为了解决传统条纹中心提取算法对物体材质及噪声敏感问题,采用自适应结构光条纹中心提取算法来提取条纹亚像素坐标。
该算法首先对图像进行预处理,利用图像掩模操作提取条纹图像感兴趣区域,通过自适应卷积模板消除噪声干扰,得到条纹区域截面宽度及条纹中心坐标的像素集合;其次根据中心坐标的像素集合采用二次加权灰度重心法求取条纹中心初始坐标值,将此作为种子点进行区域生长运算,并结合主成分分析分解特征矩阵;最终得到线结构光中心的亚像素坐标点。
结果表明,该算法能够有效快速地获取结构光条纹中心亚像素坐标,相比灰度重心法,所提算法实验结果波动性较小且标准误差也相对较小,提取速度相比基于Hessian矩阵的Steger法提高近4倍,满足工业测量系统实时性要求。
所提出的结构光条纹中心提取算法具有较高的提取精度和良好的稳健性,计算复杂度低,具有较高的实时性,可为后续3维视觉测量系统提供良好的精度保障。
关键词:图像处理;中心提取;加权灰度重心;区域生长;亚像素中图分类号:TP391.41 文献标志码:A doi:10 7510/jgjs issn 1001 3806 2021 03 015Sub pixeladaptivecenterextractionoflinestructuredlightstripeWANGFubin,LIUHefei,WANGRui,ZENGKai(DepartmentofAutomation,SchoolofElectricalEngineering,NorthChinaUniversityofScienceandTechnology,Tangshan063210,China)Abstract:Inordertosolvetheproblemthatthetraditionalstripecenterextractionalgorithmissensitivetomaterialandnoise,anadaptivestructuredlightstripecenterextractionalgorithmwasusedtoextractthefringesub pixelcoordinates.Thealgorithmfirstpreprocessestheimage,extractstheregionofinterestofthestripeimagebyusingtheimagemaskoperation,eliminatesnoiseinterferencethroughtheadaptiveconvolutiontemplate,andobtainsthepixelsetsofthestripeareacross sectionalwidthandcentercoordinates.Secondly,accordingtothepixelsetofthecentralcoordinates,theinitialcoordinatevalueofthestripecenterwascalculatedbythequadraticweightedgraycentroidmethod,whichwillbeusedastheseedpointforregionalgrowthoperation,thencombinedwithprincipalcomponentanalysistodecomposethecharacteristicmatrix,andfinallythesub pixelcoordinatepointofthecenterofthelinearstructuredlightwasobtained.Theresultsshowthatthecentersub pixelcoordinatesofthestructuredlightstripecanbeeffectivelyandquicklyobtainedbythisalgorithm.Comparedwiththegray scalebarycentermethod,theextractionresultsofthealgorithminthispaperarelessvolatileandhavearelativelysmallstandarderror.Theextractionspeedisnearly4timeshigherthanthatoftheStegermethodbasedonHessianmatrix,whichmeetsthereal timerequirementsoftheindustrialmeasurementsystem.Theproposedalgorithminthispaperhashighextractionaccuracy,goodrobustness,lowcomputationalcomplexity,andhighreal timeperformance,whichprovidesniceaccuracyguaranteeforthesubsequent3 Dvisionmeasurementsystem.Keywords:imageprocessing;centerextraction;weightedgraycentroid;regiongrow;sub pixel 基金项目:高端钢铁联合研究基金资助项目(F2019209323)作者简介:王福斌(1968 ),男,博士,副教授,硕士生导师,主要从事数字图像处理、机器视觉方面的研究。
装载机多功能铲斗焊接工艺的改进与应用

自由地收缩 , 则变形量较大 , 而焊接 应力较小 ;反之如 果工件 由于受外力的作用和 限制或 自身刚性 较大 ,就不
能 自由收缩 ,所以焊后产生的变形小 ,而焊接应力大。 在实 际生产过程 中,由于被焊工 件在焊接后均会产 生一定 的变形 ,并在 内部存在一定 的残余应力 ,即变形 和应力在焊接过程 中是同时存在的。焊 接应 力和变形直 接影响焊件的形状和尺寸,变形严重时甚至会 发生局部
( )钢和铜物理性能 比较 3
铜的导热 系数 大 ,2 % 0
时铜的导热 系数 比铁大 7倍多 ,10  ̄ 00C时大 1 倍多 。焊 1
接时热量迅速从加热 区传导 出去 , 使母 材与填充 金属难
以熔合 。
1 .焊接性分析
( )2 的焊接性 2 1 0钢 0钢属 于低碳钢 ,含碳 量低 ,强度不 高 , 塑性好 ,具 有 优 良的焊 接 性。几 乎能用 各 种 工 艺 方法 进 行 焊 接, 不需要 采用 特殊 的工 艺措 施 即可
行 了如下改进措施 :
件的重力 ,有时还要承受装配时 的捶击力 ,所 以焊接夹
具应有足够的强度 和刚度。
()热量控制 焊接过程中,会因焊接不均匀的局 1
( )夹具设计 2
该夹具利用槽钢焊接 而成 ,结构简
部加热和冷却而产生变形。因此,减少受热区的宽度也
是减少变形 的良好措施 。比如 ,小电流快速不摆动焊代 替大电流慢速摆动焊 ;小直径焊条代替大直径焊条 ;多
材料和结构而异 ,一般在 10~ o ℃ 。 0 30
顶的顶部顶紧夹具横梁。所需的顶紧力足够使待焊件和
囵 呈 笙! 董 塑 堡 ! ! 塑竖
WWW. et wo ki m a1 r ng1 50 COr 9 . r t
装载机铲斗的仿生设计及有限元分析

线 性 弹塑性 本构 关 系 , 它们 大都 能够 给 出满 足适 当精 度要 求 的结果
。
装 载机 工作 过程 中 , 切削 材料 的应 力一 应 变关 系往 往 表 现 出 明显 的非线 性 特征 , 简化 计 算 , 被 为 根
据所 研究 的具 体情 况 , 照 图 1 示 的方式 将其 简化 为 理想 的弹 塑性 材 料 本构 关 系 , 用 V nMi s 按 所 采 o s 屈 e
由斗 底 、 斗前壁 、 斗后 壁及 防溢 板 组成 的二 维模 型 。图 2为某 厂生 产 的装 载机铲 斗原 型 的纵剖 面 的二 维
简 图 , 中防溢 板 、 其 斗后 壁和 斗前 壁为 直线 , 斗底 部分 为 固定半 径 的圆 弧 。图 3为 本 研究 所 用 一 田 鼠 而 左前 爪 中趾 的 照片 ( 为便 于分 析 和测 量 , 照 中照相 机 的视线 与爪 趾 纵 剖面 保 持垂 直 ) 。 图 4中虚 线 拍 部分 为根据 图 3所示 的爪趾 内轮廓 线设计 的仿生装 载机铲 斗 的纵 剖面 二维简 图。本设 计 的设计 思 路是 改进装 载机 铲斗 的 斗底 , 仿生 曲线经 适 当的 比例 变 换 后代 替 原 装 载机 铲 斗 的 斗底 曲线 。 图 4中 实线 用 部分 为某厂 原铲 斗模 型 , 由图 可知 , 本次 改进 设计 对原 铲 斗 的斗容 相对 改动 不超 过 2 。 % 由于土 壤是 一种非 常 复杂 的散 体材 料 , 而且 各地 土 壤性 质 千 变万 化 、 不 相 同 , 出适 用 于所 有 土 各 做 壤 的研 究也不 现 实 。本 文所 用 土壤 的物 理性质 数 据取 自中 国一拖 技术 中心 大型 土槽 内经过 适 当调 配 的 土 壤 , 有一 定 的代 表 意义 。土 壤泊 松 比为 0 1 , 具 . 5 弹性 模 量为 12 0k a 剪 切模 量为 5 3 4 8k a 切 削 5 P , 4 .7 P ,
211086426_地下铲运机智能化技术进展探索

地下铲运机智能化技术进展探索图1 SLAM效果图(2)自主学习能力。
地下铲运机从远程遥控阶段向智能化阶段发展,需要具备自主学习能力,如自动规划路径、自主躲避障碍物、实时调整铲运机的工作状态、自主装卸矿石等。
面对井下复杂特殊的环境,铲运机要自行完成行走、铲装、避障等动作,目前仍具有极大的挑战,随着深度学习与人工智能的兴起,一些学者开始将此类技术应用到铲运机的智能化发展中,让车辆自主执行复杂的任务和操作。
(3)地下车辆的协同控制。
大型矿山井下矿石运输工作是由多台铲运机协同完成的,不同铲运机之间电气自动化程度差异较大,会导致各台铲运机协同作业过程中会出现紊乱,造成地下车辆系统运行的混乱,所以需要进行标准化制定,解决此类差异性问题。
地下铲运机智能化技术方案目前,公司实现了从研发传统地下燃油铲运机、地下电动铲运机到研发地下遥控电动铲运机以及地下遥控燃油铲运机的转变,基于公司目前正在生产的图2 铲运机智能化技术方案通讯架构通讯系统是该智能化技术方案中关键的一环,其性能的优劣直接决定了整个系统的工作性能,对通讯网络的性能要求见表1。
表1 通讯网络性能要求最大网络延迟/ms 最大延时抖动/ms 网络带宽/Mbps 50(包含无线网络最大延迟200)±3015(单台铲运机,包含2~4视频信号和操作安全信号)在地表控制中心和矿井巷道之间建立以太环网,井下巷道内设置若干WIFI 无线基站,无线AP 采用高通方案并支持IEEE802.11ac 标准的高性能、高带宽、多功能电信级无线设备,其WIFI 信号具有较好的抗干扰和反射、折射能力,合理地布置无线AP 的位置和方向,可以实现铲运机工作巷道的无线信号全覆盖。
车辆状态信息、环境感知信息、视频监控信息等多元信息通过通讯网络传输到控制中心,因此,其无线AP 性能要求较高,统,操作人员通过液晶显示屏查看地下铲运机的各类状态信息以及铲运机所处的工作环境信息,根据现场反馈的信息及时做出相应的操作控制,并通过终端操作台发出控制指令。
装载机铲斗参数优化设计及应用
第6期2021年6月机械设计与制造Machinery Design&Manufacture67装载机铲斗参数优化设计及应用范丹丹,徐武彬,李冰,刘万锋(广西科技大学机械工程学院,广西柳州545006)摘要:装载机铲斗性能是确定装载机牵引性能和整体参数的重要因素,为设计出合理的铲斗斗型,实现作业过程的高效节能,需要对铲装作业过程和铲斗尺寸结构进行系统的研究。
基于离散元素法,从散体力学的角度对铲装过程进行分析,并通过实验对比验证了模型的正确性。
根据四参数铲斗设计原则研究不同截面几何参数的铲斗在相同条件下的插入阻力和满斗率。
通过能量法对不同铲斗进行能量分析,得到满斗率尽可能高且最节能的铲斗,最优截面参数为:E°= 40。
,D=1.3,£\=52。
,G=0.31,为装载机节能型铲斗设计提供可靠地依据…关键词:装载机;铲斗;阻力研究;参数优化;设计应用;能量分析中图分类号:TH16;TH243文献标识码:A文章编号:1001-3997(2021)06-0067-04Optimized Design and Application of Loader Bucket ParametersFAN Dan-dan,XU Wu-bin,LI Bing,LIU Wan-feng(School of Mechanical Engineering,Guangxi University of Science and Technology,Guangxi Liuzhou545006,China)Abstract:Loader bucket performance is an important f actor in determining the traction performance and overall parameters of the loader.In order to design a reasonable bucket bucket type and achieve high efficiency and energy saving in the operation process,it is necessary to systematically study the shovel loading process and the bucket size structure.Based on the discrete element method,the shovel loading process is analyzed f rom the perspective of l oose mechanics.The correctness of t he model is verified by experimental comparison.According to the four-parameter bucket design principle,the insertion resistance and the full bucket rate of t he bucket with different cross-section geometric parameters under the same conditions are studied.Through energy analysis of d ifferent bucket,the bucket with the highest f ull bucket rate and the most energy saving is obtained,The optimal section p arameters are:E o=4O°,D=13,El=52°,G=0.31.which p rovides a reliable basis f ar the design of e nergy-saving bucket of l oader. Key Words:Loader;Bucket;Resistance Study;Parameter Optimization;Design Application;Energy Analysis1引言装载机作为典型的土方类机械设备,在工农业和建筑业中发挥着重要的作用。
综掘系统视觉处理技术研究现状及发展趋势
综掘系统视觉处理技术研究现状及发展趋势杜雨馨1, 张贺2, 王树臣1, 张建化1(1. 徐州工程学院 电气与控制工程学院,江苏 徐州 221018;2. 中为(江苏)城建设计有限公司,江苏 徐州 221003)摘要:机器视觉技术具有非接触测量、获取信息量大、数据处理能力强等优点,将其应用于综掘工作面,对于提高综掘工作效率、保障人员设备安全、减少事故发生具有重要意义。
综述了近年来视觉处理技术在煤矿综掘系统中的具体应用与发展情况,依据综掘工作面的任务分工,结合具体实际案例,重点分析了机器视觉技术在视觉检测与定位、安全监测与事故预防、装备自动化与智能化等方面的应用。
通过分析不同应用场景中各类视觉检测系统的结构与检测原理,明确了视觉处理技术在综掘工作面工程应用中的技术性能、工作流程及优缺点。
分析了视觉技术在综掘工作面应用中存在的挑战,包括环境适应性问题、成像视野范围较窄、智能算法的鲁棒性和可靠性尚待提高等。
指出多传感器信息融合技术、设备群协同控制技术与数字孪生驱动远程监控技术是基于机器视觉的煤矿智能化装备体系未来需要重点发展的新方向。
关键词:煤炭开采;综掘系统;视觉处理技术;机器视觉;视觉检测与定位;安全监测与事故预防;综掘装备自动化中图分类号:TD632 文献标志码:AResearch status and development trend of visual processing technology forfully mechanized excavation systemsDU Yuxin 1, ZHANG He 2, WANG Shuchen 1, ZHANG Jianhua 1(1. School of Electrical and Control Engineering, Xuzhou University of Technology, Xuzhou 221018, China ;2. Zhongwei (Jiangsu) Urban Construction Design Co., Ltd., Xuzhou 221003, China)Abstract : Machine vision technology has the advantages of non-contact measurement, large amount of information acquisition, and strong data processing capability. Applying it to fully mechanized excavation faces is of great significance for improving the efficiency of fully mechanized excavation work, ensuring the safety of personnel and equipment, and reducing accidents. This article summarizes the specific application and development of visual processing technology in coal mine fully mechanized excavation systems in recent years.Based on the task division of fully mechanized excavation working faces and combined with specific practical cases, this paper focuses on the analysis of the application of machine vision technology in visual inspection and positioning, safety monitoring and accident prevention, and equipment automation and intelligence. By analyzing the structures and detection principles of various visual detection systems in different application scenarios, the technical performance, workflow, and advantages and disadvantages of visual processing technology in the application of fully mechanized excavation face engineering are clarified. This study analyzes the challenges of visual technology in the application of fully mechanized excavation face, including environmental adaptability收稿日期:2023-09-12;修回日期:2023-11-05;责任编辑:胡娴。
基于模糊阈值的机器人视觉目标图像处理
基于模糊阈值的机器人视觉目标图像处理
刘海波;王福忠;刘璐
【期刊名称】《现代计算机(专业版)》
【年(卷),期】2008(000)002
【摘要】机器人视觉目标图像信噪比低,背景噪声干扰大,目标识别处理通常利用目标的灰度信息进行预处理,由此设计一种基于数学形态学和模糊阈值的灰度图像实时预处理和阈值处理技术图像分割方法.仿真实验表明,该方法实时性好,简捷快速,对目标图像识别有实用价值.
【总页数】3页(P33-35)
【作者】刘海波;王福忠;刘璐
【作者单位】河南理工大学,焦作,454000;河南理工大学,焦作,454000;河南理工大学,焦作,454000
【正文语种】中文
【中图分类】TP3
【相关文献】
1.基于双阈值的移动机器人视觉图像分割 [J], 董会英;岳宏
2.基于区域模糊阈值的前视红外目标识别 [J], 高晶;孙继银;刘婧;吴昆
3.改进滤波算法在机器人视觉目标图像处理中的应用研究 [J], 谭志飞;毛美姣;龚娟
4.模糊阈值分割算法在烧结机尾断面图像处理中的应用 [J], 杜大军;沈宪章;邱道尹;陈志武
5.基于DSP和图像处理的农业机器人视觉导航研究 [J], 江玉珍;陈杰志
因版权原因,仅展示原文概要,查看原文内容请购买。
基于尺寸优化的电铲斗杆轻量化设计
基于尺寸优化的电铲斗杆轻量化设计
谭磊;孙刚;王永富
【期刊名称】《机械设计与制造》
【年(卷),期】2022()7
【摘要】斗杆是电铲工作装置的重要组成部分,降低斗杆的质量对提高电铲的运行性能具有重要意义。
为了减轻斗杆的质量,提出Ansys Workbench响应面分析法对电铲斗杆优化设计。
为了达到电铲斗杆轻量化,运用UG对电铲斗杆进行建模,以斗杆最小的质量为设计目标,对斗杆进行静力学分析并采用多目标优化方法得到电铲斗杆有限元模型的最优设计方案。
在保证斗杆应力和形变的条件下,最终优化后的斗杆质量减轻了4.13%。
同时,对尺寸优化前后的斗杆模型静力学结果进行了比较,结果满足电铲斗杆的设计要求。
【总页数】5页(P223-227)
【作者】谭磊;孙刚;王永富
【作者单位】矿山采掘装备及智能制造国家重点实验室;东北大学机械工程与自动化学院
【正文语种】中文
【中图分类】TH16
【相关文献】
1.基于Inventor的巨型电铲斗杆有限元分析
2.基于 Inventor的巨型电铲斗杆有限元分析
3.基于Optistruct的挖掘机斗杆轻量化设计
4.电铲斗杆尺寸精度的控制及拉筋的重复利用
5.基于Battlle结构应力法的电铲斗杆焊接结构疲劳评估
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
分水岭分割 方 法 的 思 想 是 基 于 数 学 形 态 学 理 论, 其变换过程也有 若 干 种 定 义 . V I N C E N T L提出 的计算方法被认为是经典的计算 过 程 , 其主要步骤 分为排序及淹没过程 . 排序主要是 对 每 个 像 素 的 灰 度 级 按 增 序 排 列, 而淹没过程则从低到高渐次进 行. 经过分水 岭 变 换 后 , 淹没的区域之间的分界点 以分水岭脊线形式出现 , 也代表输 入 图 像 的 极 大 值 点集 . 因此 , 分水岭变换时以原始图像的梯度图像 作为输入图像 . 在点( 处的梯度可表示为 图像 f( x, x, y) y) f, f T 对于数字图 =[ x, Gx , Gy ] = . f( y) x y 像, 用差分代替导数后 , 得梯度近似表达式为
Gx = f( x, x -1, -f( y) y) 烄 ( ) 4 烅 ) Gy = f( x, x, -f( y) y -1 烆 因此 容 易 导 致 过 分 分 分水岭变换对噪声敏感 ,
割问题 . 为解 决 过 分 分 割 问 题 , 目前提出了许多有 效的办法 , 常 用 的 有 门 限 分 水 岭 分 割 方 法、 基于区 域合并的方法等 . 比较简单有效的 方 法 可 采 用 直 接 对梯度函数进行修改 , 对输入的梯 度 图 像 进 行 阈 值 处理 , 降低对微弱图像边缘的敏感性 , 即 ( f( , x, x, t) a x g( y)= m y) 式中 : 为输入的梯度图像 ; x, t 为阈值 . g( y) 在采用分水岭方法对梯 度 图 进 行 分 割 前 , 为了 防止过分分 割 , 先 将 目 标 点 标 记 出 来. 在局部区域 中, 若区域面积大于设定的阈 值 , 即 作 为 标 记. 以标
n c i k m 2 i ) ) ( ) di xk , v 1 k(
[
]
T
Jm ( U, V)=
k=1 i=1
u ∑∑ (
2 为目标函数 ; 为第 k 来自 式中 : Jm ( U, V) di xk , v i) k(
像素到第i 类中心的距离 ; m ≥1 为模糊权重指数 , ] , 一般取 m =2. m 的经验取值为 [ 5, 2. 5 1. 模糊 C 均值聚 类 的 实 现 过 程 就 是 通 过 迭 代 调 , 使得目标函数为最小 , 整( 具体计算步骤为 : U, V) ( )参数初始化 . 对于 n 个数据集的c 个类 ( 1 2 , 迭代计数器 初始化 迭 代 停 止 阈 值 ε>0, ≤c≤n)
1] 分割方法完成对铲斗目标图像的分割 [ .
1 图像分割的模糊 C-均值聚类算法
) 基金项目 :唐山市应用基础研究计划资助项目 ( 8 b 1 2 1 1 0 2 0 : , 作者简介 : 男, 高级工程师 , 王福斌 ( 工学博士 . 9 6 8- ) E a i l w f b 2 3 1 3@1 2 6. c o m 1 -m
张 磊2, 王静波1 王福斌1,
) ( 河北联合大学 电气工程学院 , 河北联合大学 现代技术教育中心电教中心 , 河北 唐山 0 河北 唐山 0 6 3 0 0 9; 2. 6 3 0 0 9 1.
利用视觉信息跟踪 、 识别挖掘 机 器 人 铲 斗 目 标 是 关 键 技 术 之 一 . 摘要 :挖掘机器人自主挖掘目标的实现过程中 , 传统的阈值分割方法很难将铲斗从复杂环境中分割出 来 , 提出了改进的分水岭铲斗图像目标分割方法, 首先对 铲斗目标图像进行模糊 C 均值 ( 再以初步分割后的图像为基础得到梯度图 聚 类 分 割, C 为 预 定 的 类 别 数 目) 像, 将梯度值与设定的阈值比较得到标记点 , 最后以标记点作为极小值点进行分水岭分割 . 实验表 明 分 割 效 果 得 到了改善 . 关键词 :挖掘机器人 ;目标图像 ;模糊 C 均值聚类 ;分水岭分割 ( ) 中图分类号 : T P 2 4 2. 3 文献标志码 : 6 7 2-5 5 8 1 2 0 1 3 0 4-0 2 8 6-0 3 A 文章编号 : 1
I m r o v e d w a t e r s h e d s e m e n t a t i o n f o r b u c k e t p g o b e c t i m a e s o f e x c a v a t o r r o b o t s j g
2 1 , WA F b Z L WA J b N G u- i n1 , H A N G e i N G i n o - g
中心, d i k -v i‖ 为 数 据 集 中 的 某 个 元 素 k = ‖x 将元素与类进行模 xk 与 聚 类 中 心 v i 间 的 距 离. 糊划分时, 按照一定的隶属度将某个元素划分到 某一类, 第 k 个像素对第i 类的隶属度可表示为 模糊 隶 属 度 矩 阵U= { 则用来表示分类 ui ui k, k} 结果. 通 过 最 小 化 隶 属 度 矩 阵U 和 聚 类 中 心 矩 阵 , 即 可 实 现 模 糊 C- V 组 成 的 目 标 函 数 Jm ( U, V) 均值聚类:
第4期
王福斌 , 等: 挖掘机器人铲斗目标图像的改进分水岭分割
7 2 8
根据图像中像素及 c 个聚类中心 像 X 划分为c 类 , 的每一个中心的加权隶属度 , 对预 定 的 目 标 函 数 进 行迭代优化运算 . …, 为数据集的c 个聚类 设 V= { v v v 1, 2, c}
[ 2]
: , A b s t r a c t D u r i n t h e i m l e m e n t a t i o n r o c e s s o f a u t o n o m o u s o b e c t e x c a v a t i o n v i a e x c a v a t o r r o b o t s t h e g p p j b u c k e t o b e c t s e c u r e s a c r i t i c a l o s i t i o n i n v i s i o n i n f o r m a t i o n t r a c k i n . B e m l o i n t h e t r a d i t i o n a l j p g y p y g , t h r e s h o l d s e m e n t a t i o n m e t h o d i t i s d i f f i c u l t t o s e m e n t t h e b u c k e t f r o m t h e c o m l i c a t e d e n v i r o n m e n t . A s g g p , , s u c h t h e i m r o v e d w a t e r s h e d s e m e n t a t i o n m e t h o d i s r o o s e d . F i r s t l t h e b u c k e t o b e c t i m a e s a r e p g p p y j g , C-m r o c e s s e d u s i n t h e f u z z e a n s c l u s t e r i n . T h e n t h e r a d i e n t i m a e s a r e o b t a i n e d f r o m t h e i n i t i a l l - p g y g g g y , s e m e n t e d i m a e s . N e x t t h e m a r k o i n t s a r e a t t a i n e d t h r o u h c o m a r i n t h e r a d i e n t v a l u e s a n d g g p g p g g , t h r e s h o l d i n v a l u e s . F i n a l l h e m a r k o i n t s a r e u s e d a s t h e m i n i m u m o i n t s f o r w a t e r s h e d s e m e n t a t i o n. g yt p p g , T h e r e i n i t s i s f o u n d f r o m e x e r i m e n t a l r e s u l t s t h a t t h e s e m e n t a t i o n e f f e c t i s i m r o v e d . p g p : ; ; ; C-m K e w o r d se x c a v a t o r r o b o to b e c t i m a e sf u z z e a n s c l u s t e r i n a t e r s h e d s e m e n t a t i o n j g y g w g y 采用视觉伺服 为实现挖掘机器人的自动挖 掘 , 控制的方法 对 挖 掘 机 铲 斗 末 端 运 动 轨 迹 进 行 规 划 控制 . 由于挖 掘 作 业 现 场 环 境 的 复 杂 性 , 尤其是背 景图像的复杂及光照条件的不理 想 , 使得对铲斗目 标图像的分割和识别有较大的困 难 . 一般的基于阈 值的图像分 割 方 法 很 难 准 确 地 将 铲 斗 目 标 分 割 出 来, 从而影响 了 后 续 的 铲 斗 特 征 提 取 及 识 别 工 作 , 为此本文将 分 水 岭 图 像 分 割 方 法 引 入 到 铲 斗 目 标 分割中 . 考虑到一般 的 分 水 岭 分 割 方 法 容 易 造 成 图 像 …, …, 设给定图像数据集为 X = { x1 , x2 , xk , 其中 xk 为 图 像 中 各 像 素 的 灰 度 值 . 将图 xn } ∈R, 的过分割或欠分割现象 , 为此提出 了 改 进 的 分 水 岭 图像分割方法进行铲斗目标的分 割 , 首先采用模糊 聚类分 割 方 法 对 原 C 均值 ( C 为预定的类别数目 ) 始图像进行初步分割 , 然后采用标 记 提 取 的 分 水 岭