CEN-U06中文资料
CE认证详解
CE认证-不符的后果- 产品不能依法供应欧盟市场;- 以前投放在市场的产品,不能收回;- 可能导致产品的扣押和(或)罚款。
编辑本段CE认证费用CE认证费用的主因CE认证费用主要取决于选择的认证机构和产品的相关指令。
不同的产品测试项目也截然不同,一般常见产品为电子电器类产品,常见测试项目分类EMC与LVD指令。
而机械产品CE认证费用远远高于普通产品,其涉及到审厂程序与评估。
CE认证费用的理解一、选择CE认证机构大多数企业需要TUV认证,但都认为报价太过昂贵。
TUV的CE认证,它的权威性是毋庸置疑的,但其实欧盟承认的认证机构有很多,完全可以选择欧盟认可的任何认证机构来通过CE认证。
CE认证只是产品的安全认证,并未对产品质量进行认证。
因此,通过TUV或者是其它欧洲成员国认可的认证机构区别并不大,国内的认证机构也可以发CE认证的证书。
CE认证是一种合格评定,它一般是由自我申明和认证机构认证证明的两种形式。
国内发的CE认证证书:第一点:权威性受到置疑,检测证书不认可,企业要受到很大的损失。
第二点:出口货物上岸时,对方海关可能阻止您的货物上岸,原因是国内的检测机构欧盟国家是不承认的,出现问题检测机构也无法对你进行担保。
二、CE认证时间国内的检测时间比较快,而真正的欧盟承认的认证机构,所需时间比较长一点.选择什么样的认证机构,还要参考客户的要求和自身的需求,比如对方公司一定要求做TUV认证,那也毫无办法,自身是跨国大型企业,要打造世界级品牌,那么做TUV认证是完全符合自身情况的。
三、CE认证费用与产品指令一些产品CE认证只要求通过LVD认证,客户却指定必须要做EMC指令,而这两者之间有费用的差距。
做CE认证,部分客户准备国内市场上销售,做CE认证是为了宣传自己的产品,就随意选个指令做。
CE 认证规定其产品在欧盟成员国市场上自由流通,要求其产品所包含的所有指令通过检测认证后,才能加贴CE标识。
电器类CE认证一般要求LVD、EMC还应包括机械指令.因此费用完全不一样,CE认证选择指令也应参考顾客的意见和产品的自身情况。
CE认证培训资料

CE ,UL,FCC认证测试项目CE认证:CE认证:LVD测试项目:1.工作电压(1)工作电压: 1.8 V(DSP内核供电),3.3V(主要芯片供电), 5 V(CODEC与SLIC供电),12V(外部电源供电),–24V(SLIC供电),–56V(SLIC供电), +56V(SLIC供电)。
(2)测试工具:万用表(3)测试方法:测试所有电源部分输出的电压。
2.振动实验(1)测试目的:测试移动台受振动冲击性能。
(2)测试方法:1 参照标准2 测试工具随机振动台/ 正弦振动台3 测试参数振动频率:5Hz~20Hz,ASD=0.96m2/s3 (即0.01g2/Hz)振动频率:20Hz~500Hz,在20Hz处ASD=0.96m2/s3,其他-3dB/倍频程振动位置:3面(3个垂直面x,y,z)持续时间:30分钟 / 面扫描频率: 5Hz~500Hz~5Hz;测试样品数: 2台(3)通过准则测试后的判定准则 PASS FAIL1 无功能性的损坏,应能正常使用。
2 检查频率和相位误差,指标必须在允许范围内。
3 内部无破损,无脱落器件。
4外壳无破裂或者碎裂,轻微磨损和轻微裂纹是允许的。
3.冲击试验在实际工程机械中,有许多构件常受到冲击载荷的作用,机器设计中应力求避免冲击波负荷,但由于结构或运行的特点,冲击负荷难以完全避免,例如内燃机膨胀冲程中气体爆炸推动活塞和连杆,使活塞和连杆之间发生冲击,火车开车、停车时,车辆之间的挂钩也产生冲击,在一些工具机中,却利用冲击负荷实现静负荷难以达到的效果,例如锻锤、冲击、凿岩机等,为了了解材料在冲击载荷下的性能,我们必须作冲击实验。
1.1 一、实验目的1) 了解冲击实验的意义,材料在冲击载荷作用下所表现的性能1.2二、实验设备和仪器 摆式冲击试验机、游标卡尺等1.3 三、基本原理 1) 冲击实验是研究材料对于动荷抗力的一种实验,和静载荷作用不同,由于加载速度快,使材料内的应力骤然提高,变形速度影响了材料的机构性质,所以材料对动载荷作用表现出另一种反应。
三垦vm06变频器使用说明书

章
4-6-2 选购件基板的安装方法.................................................................30 第
5 操作面板 .............................................................................31
第
5-1-2 操作面板 LCD 操作部分.................................................................32
3
5-1-3 操作面板 LED 显示部分.................................................................32
3-4-1 拆卸操作面板 ...........................................................................16 3-4-2 安装操作面板 ...........................................................................16
2 产品的确认和注意事项 .................................................................10
2-1 产品的确认 ..................................................................................10 2-2 型号的内容 ..................................................................................10 2-3 使用前的注意事项 ............................................................................11
2N3906中文资料(nte)中文数据手册「EasyDatasheet - 矽搜」
VCE = 1V, I C = 1mA
40 − − 80 − −
2N3905 2N3906
VCE = 1V, I C = 10mA
50 − 150 100 − 300
2N3905 2N3906
VCE = 1V, I C = 50mA
30 − − 60 − −
2N3905 2N3906
VCE = 1V, I C = 100mA
芯片中文手册,看全文,戳
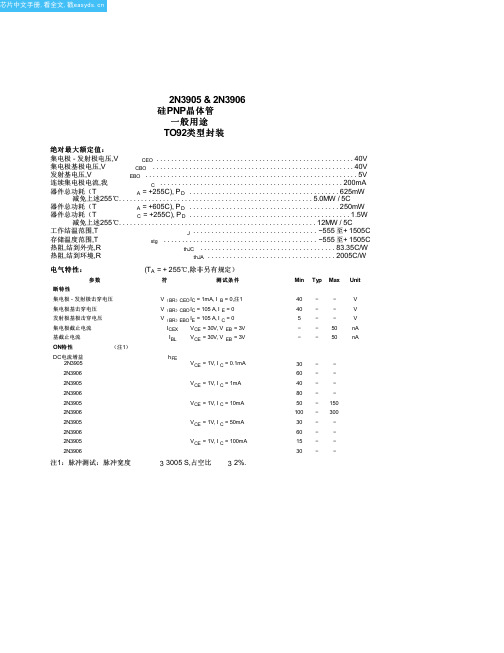
2N3905 & 2N3906 硅PNP晶体管
一般用途
TO92类型封装
绝对最大额定值:
集电极 - 发射极电压,V
CEO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40V
器件总功耗(T
C = +255C), PD . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.5W
减免上述255℃. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12MW / 5C
减免上述255℃. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5.0MW / 5C
器件总功耗(T
伦茨 伺服控制器样本
9300 伺服套准控制器 许多设备可加工材料长度。套印、剪切、冲孔、压花和硬质 合金接头必须按照材料长度上的给定印制图象来准确定位。 然而,由于工业工序(材料性能、生产参数)产生的波动, 印制图象的位置可能会偏移。除“电子轴”的基本要求外,还 需要对高套准准确度印制图象上的旋转运动进行更高级别定 位。内置在驱动控制器中的套准控制不断重新调整辊筒式供 料器、印刷筒、切割棍和其他带有印制图象处理站的角度设 定。因此,套印、剪切、冲孔、压花、硬质合金接头等均定 位在相应位置。 ƒ Insetter ƒ 横切刀 ƒ 印刷单元 ƒ ...
产品信息
9300 伺服控制器产品号
EVS 9321
E
S
V003
设备尺寸
9321 9322 9323 9324 9325 9326 9327 9328 9329 9330 9331 9332
设计
E — 内置单元/散热器外置技术 C — 冷板
系列
S — 伺服控制器 K — 凸轮曲线伺服 P — 位置控制伺服 R — 校准控制伺服 I — 伺服PLC T — 伺服PLC技术
关于此样本
13
9300 - 伺服控制器系列
14
功能与特点
16
控制连接端
17
轴模块基本型号
18
直流母线运行型号
19
标准和运行条件
20
PLC 功能
21
轴模块
轴模块额定数据
22
供电模块
标准和运行条件
26
再生能量供电模块的额定数据
27
供电模块额定数据
28
制动单元
29
附件
制动斩波器和制动电阻
31
IP20防护等级的抗振制动电阻
BCU操作说明书,中文翻译版

BCU操作说明书,中文翻译版烧嘴控制单元—BCU 4##操作说明书●请阅读并保留在一个安全的地方符号的解释:●,①, ②, ③... =功能→ =说明这些操作说明里的所有工作的开始只能由被授权的专门人员来完成!注意:不正确的安装、调节、修改、操作或维护可能会造成材料的损坏。
用之前请阅读本说明书,这个单元必须按照生效的规定来安装。
内容符合标准声明、测试、安装、电缆的选择与安装、技术数据、接线、调节、鉴定、调试、高温下的操作、检查功能、手动操作、出现故障时的处理、读取火焰的信号和参数设置、附件符合标准声明我们生产商在此声明,标有产品ID号CE-0063BO1064的产品:BCU400,460,465,480,遵守以下指令的基本要求:—90/396/EEC与 EN 298相一致—98/37/EC与EN 746的相关截面相一致—73/23/EEC与相关的标准相一致—89/336/EEC与涉及到辐射的相关标准相一致现场总线的接口应按照EN 50170-2的要求,,相关产品应符合由被通告人0063所做的定型试验,综合质量的保证是由一个依据DIN EN ISO 9001的质量体系认证来担保的,DIN EN ISO 9001是按照附件2第3页的指令90/396/EEC.Elster GmbHOsnabrückCAS和FM认证加拿大标准协会类别:3335-01 和 3335-81,“系统(气体)—自动点火和部件”,FMRC:7611“燃烧保护设施和火焰感应系统”,应用程序的设计依据NFPA 85 和NFPA 86。
BCU带有完整的点火变压器,在连续的操作中用来点燃和检测燃气烧嘴,BCU 440–480的监测是由电离电极来执行的,BCU 460–480由紫外线传感器来执行。
带有UVS式UV传感器的BCU只能在断续操作状态下使用,这就意味着操作必须在24小时内间断一次。
带有UVD 1式的UV传感器的BCU只适应于BCU 460..U 和BCU 480..U,这种BCU也适用于连续的操作,连接的细节请看UVD操作说明书。
LOGO! 0BA6 中文手册
专业人员 指定的用途
பைடு நூலகம்
如果危险等级大于一,将使用表示最高危险等级的警告通知。带有警示符号的人员伤害的警告同时也包含财 产损失的警告
请按照此文档安装设置设备/系统。只有专业人员才能对装置系/ 统进行调试和操作。 本文档中安全通知情 况下定义合格人员为现行安全惯例和标准中规定的有权限对设备、系统和电路进行调试、接地和贴标签的 人员。
手册适用范围
本手册适用于 0BA6 系列的设备。
LOGO! 0BA6 设备系列的新特点
• LOGO! TD(文本显示)提供了附加的消息显示设备,包含四个光标键和四个功能键,可 以用于电路编程。
• 新的 LOGO! 电池卡和 LOGO! 存储器电池卡为实时时钟提供了长达两年的备用电池。新 的 LOGO! 存储卡和存储器电池卡提供了 32 Kb 的存储空间:四倍于 LOGO! 0BA5 存储 卡的存储空间。
2.3.6 连接 AS 接口总线 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
2.4
运行设备 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
LOGO! 手册中描述的接线信息,在与设备配套的 LOGO! 产品信息中也有同样描述。关于如何在 PC 上编程 LOGO! 的详细说明,请参见 LOGO!Soft Comfort 的在线帮助。 LOGO! Soft Comfort 是用于 PC 上的编程软件。它可以在 WindowsR(包括 Windows VistaR)、LinuxR 和 Mac OS XR 环境下运行。它可帮助您启动 LOGO!,并可以独立 于 LOGO! 编写、打印和保存程序。
唯创电子 WTN6 系列语音芯片说明书 - 中文

广州唯创电子有限公司MP3录音模块WTN6系列语音芯片说明书V1.19Note:WAYTRONIC ELECTRONIC CO.,LTD.reserves the right to change this document without prior rmation provided by WAYTRONIC is believed to be accurate and reliable.However,WAYTRONIC makes no warranty for any errors which may appear in this document.Contact WAYTRONIC to obtain the latest version of device specifications before placing your orders.No responsibility is assumed by WAYTRONIC for any infringement of patent or other rights of third parties which may result from its use.In addition,WAYTRONIC products are not authorized for use as critical components in life support devices/systems or aviation devices/systems,where a malfunction or failure of the product may reasonably be expected to result in significant injury to the user,目录1.概述: (2)2.功能简述: (2)3.管脚描述: (2)3.1管脚分布图 (3)4.极限参数: (3)5.直流特性: (3)6.一线串口通讯: (4)6.1管脚分配: (4)6.2一线语音地址对应关系: (5)6.3一线语音及命令码对应表: (5)6.4一线串口时序图: (6)7.两线串口通讯: (7)7.1管脚分配: (7)7.2语音地址对应关系: (7)7.3语音及命令码对应表: (7)7.4两线串口时序图: (8)8.数脉冲控制方式: (9)8.1管脚分配: (9)8.2语音地址对应关系: (9)8.3数脉冲控制时序: (10)9、按键控制模式 (10)10.程序范例 (12)10.1一线串口控制程序 (12)10.2二线串口控制程序 (13)10.3数脉冲控制程序 (14)11.应用电路 (15)11.1一线串口应用电路 (15)11.2两线串口应用电路 (16)11.3数脉冲应用电路 (18)11.4按键应用电路 (19)12.封装管脚图 (21)1.概述:WTN6系列为多功能,低功耗,高性能的CMOS语音芯片。
Vectron GNSSDO NMEA 参考手册说明书
Vectron GNSSDO NMEA Reference ManualRev. A, 07-27-18Revision History Revision Date DescriptionA 07-27-18 •First ReleaseTable of ContentsCHAPTER 1 INTRODUCTION ...................................................................................................................................... - 4 -1.1P URPOSE (4)1.2N OTICE (4)CHAPTER 2 NMEA-0183 STANDARD SENTENCES................................................................................................ - 5 -2.1S TANDARD NMEA P ROTOCOL (5)2.2NMEA T ALKER I DENTIFIERS (5)2.3A VAILABLE S ENTENCES L IST (6)CHAPTER 3 NMEA-0183 STANDARD SENTENCE DETAILS................................................................................. - 7 -3.1I NTRODUCTION (7)3.2GGA:G LOBAL P OSITIONING S YSTEM F IX D ATA (7)3.3GLL:G EOGRAPHIC P OSITION –L ATITUDE/L ONGITUDE (8)3.4GNS:GNSS F IX D ATA (8)3.5GSA:GNSS DOP AND A CTIVE S ATELLITES (9)3.6GSV:GNSS S ATELLITES IN V IEW (10)3.7RMC:R ECOMMENDED M INIMUM N AVIGATION I NFORMATION (11)3.8VTG:C OURSE O VER G ROUND AND G ROUND S PEED (12)3.9ZDA:T IME &D ATE (12)Introduction1.1 PurposeVectron GNSS Disciplined Oscillator (GNSSDO) modules embed a Global Navigation Satellite System (GNSS) receiver which, given a sufficiently high-quality signal, provide timing and position data to the user. Timing information is used by the module to discipline the onboard high-stability oscillator. This information, along with position and navigation data, is forwarded to the user via the module’s serial port in the form of ASCII NMEA-0183 Standard Sentences. This document outlines which standard sentences are available, and provides details for each.1.2 NoticeEach satellite system is operated by their respective country, Vectron cannot guarantee and is not liable for degradation of performance due to factors outside of the module’s or Vectron’s control. This includes, but is not limited to, degradation of satellite system performance due to changes or upgrades by the system operator, and poor signal quality at the module’s antenna port. The user is expected to be familiar with the implementation, limitations, and risks associated with GNSS solutions, and is responsible for providing and properly implementing any necessary external electronics and conditions, such as: antenna location, antenna quality, cable quality, transmission lines, matching, signal levels, avoiding multi-path interference, shielding from both internal and external noise sources, etc.Information herein related to the NMEA-0183 protocol is for reference only. This protocol is defined by the National Marine Electronics Association in the document:”NMEA 0183 STANDARD FOR INTERFACING MARINE ELECTRONIC DEVICES Version 4.10”(NATIONAL MARINE ELECTRONICS ASSOCIATION, June, 2012)Vectron reserves the right to make changes to the product(s) and/or information contained herein without notice. No liability is assumed as a result of their use or application.All brand and product names are registered trademarks or service marks of their respective holders. No rights under any patent accompany the sale of any such product(s) or information.NMEA-0183 Standard Sentences2.1 Standard NMEA Protocol<------------------------- Checksum Range ----------------------->$ <Address> {,<data>} *<checksum> <CR><LF>Notes1)All characters are transmitted in ASCII format2)The start character is always '$'3)The address field is subdivided into two subfields: <TT><SSS>, where:a.<TT> is the Talker Identifier. It is always:i.Gx for GNSS messages (See Talker Identifiers Section)ii.P for proprietary messagesb.<SSS> is the Sentence formatter, which defines the message content4)Data fields are delimited by a comma ','. Field length can vary, if no data isavailable for a particular field, it will be left empty (null).5)The checksum starts with an asterisk '*' and consists of two characters containingthe hexadecimal 8-bit exclusive OR of all characters between '$' and '*'.6)The end sequence is always a carriage return and a line feed <CR><LF>.2.2 NMEA Talker IdentifiersStandard NMEA Sentences reported by the GNSS receiver may use one of a several possible talker IDs depending on the state of the receiver and its current fix. For example, a module with a view of only GPS satellites will fix to GPS and report information using the “GP” identifier. If this same module later obtains enough GLONASS satellites in view, it may switch to a multi-GNSS fix and begin reporting information using the “GN” identifier.When using multiple constellations, the user must ensure that their system is able to receive and process these messages under all possible identifiers. Table 2.1-1 contains all identifiers currently implemented (at the time of writing) by Vectron GNSSDO products. The user should be prepared to handle these identifiers if GNSS information is needed in their application.Table 2.2-1, GNSS System Talker IDsTalker Identifier DescriptionGN Any combination of 2 or more GNSS systemsGP Global Positioning System (USA), QZSS (Japan)GL GLONASS (Russia)GA Galileo (EU)2.3 Available Sentences ListVectron GNSSDO module support up to 8 of the following standard NMEA output sentences, defined by the NMEA Standard 0183 Version 4.10 (June, 2012). Thedescriptions in the following chapter are for reference only, as these sentence formats are defined exclusively by the copyrighted document from the NMEA.Table 2.3-1, Available NMEA Standard SentencesFormatter Fix Data Date Time Position Navigation GGA X 1 X X GLL X X GNS X X X GSA X GSV X RMC X X X VTG X ZDAXXNote: 1) GGA is specific to GPS fix data onlyPlease note that some modules may not support all the above talker identifiers orsentences. Proprietary report messages (where the talker id is ‘P’) may also be reported by the module. Individual sentences may be enabled or disabled by the user, and the rate at which they are reported may also be modified. Check the device-specific reference manual and appropriate proprietary protocol user’s guide for more details.Sentence FormatterDescriptionGGA Global Positioning System Fix Data GLL Geographic Position – Latitude/Longitude GNS GNSS Fix DataGSA GNSS DOP and Active Satellites GSV GNSS Satellites in ViewRMC Recommended Minimum Navigation Information VTG Course Over Ground and Ground Speed ZDATime & DateChapter 3NMEA-0183 Standard Sentence Details3.1 IntroductionThis section provides details for each available NMEA Standard Sentence.These formats are defined by the NMEA 0183 Standard Version 4.10 (June, 2012) - the descriptions and information provided in this section are for reference only. Vectron modules may not populate all fields as described by the NMEA specification, and in this case, these fields are marked “Not Supported”.3.2 GGA: Global Positioning System Fix DataMessage Structure:$XXGGA,hhmmss.sss,ddmm.mmmm,a,dddmm.mmmm,a,x,xx,x.x,x.x,M,x.x,M,,*cs<CR><LF> Example:$GPGGA,020418.127,4048.4894,N,7720.2754,W,1,8,1.5,42.0,M,33.8,M,,*XX# Name Format Example Description1 UTC hhmmss.sss 020418.127 “hh” hour, “mm” minute, “ss.sss” second2 Latitude ddmm.mmmm 4048.4894 Latitude Degrees and Minutes3 Lat. N/S a N Latitude North or South4 Longitude dddmm.mmmm 7720.2754 Longitude Degrees and Minutes5 Long. E/W a W Longitude East or West6 Fix Quality x 1 “0” Fix Invalid, “1” Fix Valid7 Satellites1xx 8 Number of GPS satellites used in current fix8 HDOP2 x.x 1.5 Horizontal Dilution of precision9 Altitude x.x 42.0 Altitude above/below mean sea level10 Altitude Unit M M Unit of Altitude (meter)11 Geoidal Height xxx 33.8 Geoidal Height12 Geoidal Height Unit M M Unit of Geoidal Height (meter)13 Not Supported Field will be empty14 Not Supported Field will be emptyNotes:1)This field counts GPS, QZSS, and SBAS satellites only. Other GNSS satellites arenot included. Maximum number is 12.2)The HDOP field may be null if a valid fix is not available3.3 GLL: Geographic Position – Latitude/LongitudeMessage Structure:$XXGLL,ddmm.mmmm,a,dddmm.mmmm,a,hhmmss.sss,a,a*cs<CR><LF>Example:$GPGLL,4048.4894,N,7720.2754,W,020418.127,A,A*XX# Name Format Example Description1 Latitude ddmm.mmmm 4048.4894 Latitude Degrees and Minutes2 Lat. N/S a N Latitude North or South3 Longitude dddmm.mmmm 7720.2754 Longitude Degrees and Minutes4 Long. E/W a W Longitude East or West5 UTC hhmmss.sss 020418.127 “hh” hour, “mm” minute, “ss.sss” second6 Status a A “A” Data Valid, “V” Data Invalid7 Position Mode a A “A” Autonomous, “N” Data InvalidNotes:3.4 GNS: GNSS Fix DataMessage Structure:$XXGNS,hhmmss.sss,ddmm.mmmm,a,dddmm.mmmm,a,xxx,xx,x.x,x.x,x.x,,,x*cs<CR><LF> Example:$GNGNS,020418.127,4048.4894,N,7720.2754,W,AAN,18,1.5,42.0,33.8,,,V*XX# Name Format Example Description1 UTC hhmmss.sss 020418.127 “hh” hour, “mm” minute, “ss.sss” second2 Latitude ddmm.mmmm 4048.4894 Latitude Degrees and Minutes3 Lat. N/S a N Latitude North or South4 Longitude dddmm.mmmm 7720.2754 Longitude Degrees and Minutes5 Long. E/W a W Longitude East or West6 Mode Indicator xxx AAN “A” Autonomous, “N” Invalid for each system(GPS, GLONASS, Galileo)7 Satellite Count xx 18 Number of satellites used (0-32)8 HDOP x.x 1.5 Horizontal Dilution of Precision (0.0-50.0)9 Altitude x.x 42.0 Altitude above mean sea-level (geoid)10 Geoidal Height x.x 33.8 Geoidal Height11 Not Supported12 Not Supported13 Nav. Status x V Navigation Status Indicator“S” Safe, “C” Caution, “U” Unsafe, “V” Not Valid Notes:3.5 GSA: GNSS DOP and Active SatellitesMessage Structure:$XXGSA,a,a,xx,xx,xx,…,xx,x.x,x.x,x.x,h*cs<CR><LF>Example:$GNGSA,A,3,09,15,26,05,24,21,08,02,29,28,18,10,0.8,0.5,0.5,1*XX$GNGSA,A,3,79,69,68,84,85,80,70,83,,,,,0.8,0.5,0.5,2*XX# Name Format Example Description1 Operation Mode a A “M” 2D/3D Fixed, “A” 2D/3D Auto-Switching2 Mode a3 “1” No Fix, “2” 2D Fix, “3” 3D Fix3-14 Satellite Numbers1xx 09 01-99, SVIDs used in fix15 PDOP x.x 0.8 Position Dilution of Precision16 HDOP x.x 0.5 Horizontal Dilution of Precision17 VDOP x.x 1.5 Vertical Dilution of Precision18 GNSS System ID h 2Notes:1)Multiple messages may be reported if multiple systems are used for the current fix(GPS, GLONASS, etc.). The identifier will follow the convention of other messages, but field 18 will indicate which system the message is providing information from.2)SVIDs are numbered as follows:a.GPS: 01-32b.SBAS: 33-51 (120 to 138)c.GLONASS: 65-92 (01 to 28)d.QZSS: 93-99 (193 to 199)3.6 GSV: GNSS Satellites in ViewMessage Structure:$XXGSV,x,x,x,xx,xx,xxx,xx,xx,xx,xxx,xx,xx,xx,xxx,xx,xx,xx,xxx,xx,…,h*cs<CR><LF>Example:$GPGSV,4,1,14,15,67,319,52,09,63,068,53,26,45,039,50,05,44,104,49,1*XX$GPGSV,4,2,14,24,42,196,47,21,34,302,46,18,12,305,43,28,11,067,41,1*XX$GPGSV,4,3,14,08,07,035,38,29,04,237,39,02,02,161,40,50,47,163,44,1*XX$GPGSV,4,4,14,42,48,171,44,93,65,191,48,,,,,,,,,1*XX$GLGSV,3,1,09,79,66,099,50,69,55,019,53,80,33,176,46,68,28,088,45,1*XX$GLGSV,3,2,09,70,25,315,46,78,24,031,42,85,18,293,44,84,16,246,41,1*XX$GLGSV,3,3,09,86,02,338,,,,,,,,,,,,,,1*XX# Name Format Example Description1 Number of Messages x 4 Total number of messages2 Message Number x 1 Message number in this sequence3 Number of Satellites x 14 Satellites in line-of-sight4 1st SV ID xx 15 Satellite ID Number5 1st SV Elevation xx 67 Satellite Elevation Angle (degree)6 1st SV Azimuth xxx 319 Satellite Azimuth Angle (degree)7 1st SV SNR xx 52 Satellite Signal-to-Noise Ratio (SNR) (dB)8-11 2nd SV Details12-15 3rd SV Details16-19 4th SV Details20 Signal ID h 1Notes:1)Each message contains fields for 4 satellites, multiple messages may be reportedper each GNSS system, enough to indicate all satellites in line-of-sight. If less than4 satellites are reported by a message, the extra fields will be null.2)If a satellite is in line-of-sight but is not able to be used in the fix, the SNR field isleft null. A situation where this may be observed is if a satellite is predicted by the almanac to be visible, but is obscured or masked by an SNR mask or elevationmask.3)The ‘GN’ talker identifier is not used for GSV, as a GSV message or group ofmessages is reported for each system which is enabled and satellites are visible.4)SVIDs are numbered as follows:a.GPS: 01-32b.SBAS: 33-51 (120 to 138)c.GLONASS: 65-92 (01 to 28)d.QZSS: 93-99 (193 to 199)3.7 RMC: Recommended Minimum Navigation InformationMessage Structure:$XXRMC,hhmmss.sss,ddmm.mmmm,a,dddmm.mmmm,a,x.x,x.x,ddmmyy,x.x,a,a,a*cs<CR><LF> Example:$GNRMC,020418.127,4048.4894,N,7720.2754,W,0.00,0.00,180116,,,A,V*XX# Name Format Example Description1 UTC hhmmss.sss 020418.127 “hh” hour, “mm” minute, “ss.sss” second2 Latitude ddmm.mmmm 4048.4894 Latitude Degrees and Minutes3 Latitude N/S a N Latitude North or South4 Longitude dddmm.mmmm 7720.2754 Longitude Degrees and Minutes5 Longitude E/W a W Longitude East or West6 Speed x.x 0.00 Speed in knots7 True Course x.x 0.00 Course in degrees8 Date ddmmyy UTC Date9 Not Supported10 Not Supported11 Positioning Mode a A “A” Autonomous, “N” Invalid12 Nav. Status a V Navigation Status Indicator“S” Safe, “C” Caution, “U” Unsafe, “V” Not Valid Notes:3.8 VTG: Course Over Ground and Ground SpeedMessage Structure:$XXVTG,x.x,T,x.x,M,x.x,N,x.x,K,a*cs<CR><LF>$GNVTG,0.00,T,,M,0.00,N,0.00,K,D*XX# Name Format Example Description1-2 True Course x.x,T 0.00,T True Coarse (degrees)3-4 Not Supported x.x,M ,M5-6 Speed – kts x.x,N 0.00,N Speed in knots7-8 Speed – km/h x.x,K 0.00,K Speed in km/h9 Positioning Mode a A “A” Autonomous, “N” Invalid Notes:3.9 ZDA: Time & Date$XXZDA,hhmmss.sss,xx,xx,xxxx,xxx,xx*cs<CR><LF>$GPZDA,014811.000,13,09,2013,+00,00*XX# Name Format Example Description1 UTC hhmmss.sss 020418.127 “hh” hour, “mm” minute, “ss.sss” secondUTC: Day xx 13 Day of monthUTC: Month xx 09 MonthUTC: Year xxxx 2013 YearLocal Zone Hours xxx +00 (+/-) 00 – 23Local Zone Minutes xx 00 00 – 59Notes:。
symbia intevo6ct参数

symbia intevo6ct参数下载提示:该文档是本店铺精心编制而成的,希望大家下载后,能够帮助大家解决实际问题。
文档下载后可定制修改,请根据实际需要进行调整和使用,谢谢!本店铺为大家提供各种类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by this editor. I hope that after you download it, it can help you solve practical problems. The document can be customized and modified after downloading, please adjust and use it according to actual needs, thank you! In addition, this shop provides you with various types of practical materials, such as educational essays, diary appreciation, sentence excerpts, ancient poems, classic articles, topic composition, work summary, word parsing, copy excerpts, other materials and so on, want to know different data formats and writing methods, please pay attention!标题:探索Symbia Intevo 6CT参数:优势与应用导言近年来,医学影像技术取得了巨大的进步,其中计算机断层扫描(CT)技术在临床诊断和研究中扮演着至关重要的角色。
Newall B60数显表 中文说明书

ÑNEWALL测量系统有限公司B60数显目录1.0简介EMC和低电压合格技术规格2.0安装安装电源连接接通3.0SET-UP机器类型睡眠/数据保存功能编码器类型决议方向半径/直径线性误差补偿计算线性误差补偿4.0用户说明选项使用键盘5.0标准功能使用增量使用绝对Digifind数据预先设定寸/毫米波Centrefind数据保存功能(睡眠)6.0功能B60Mill功能B60车床功能7.0故障排除8.0清洁Introduction1.0介绍1.1EMC 和低电压要求在B60读数符合相关欧洲标准的电磁兼容性和低电压指示,详情如下.BS EN 61000-6-4:BS EN 61000-6-2:电磁兼容性。
通用排放标准-工业环境电磁兼容性。
通用排放标准-工业环境.Certificate No FM36096BS EN 61010-1:用于电气设备的安全要求测量,控制和实验室用1.2技术规格尺寸:140毫米(5.5英寸)高度:宽度:深度:重量:工作电压:电源电压的波动:电源频率:最大功耗:工作温度:储存温度:输入:分辨率:球栅尺10球栅尺5240mm (9.5in)80mm (3.2in)2.5kg (5.5lbs)115或230V (开关选择)不超过工作电压为+/-15%50to 60Hz 18VA 0to 45°C -20to 70°C受养人在模型中,一个,两个或三个球栅尺微栅尺编码器5微米(0.0002英寸)/10微米(0.0005英寸)/20微米(0.001英寸)/50微米(0.002英寸)1微米(0.00005英寸)/2微米(0.0001英寸)/5微米(0.0002英寸)/10微米(0.0005英寸)取消环境条件:室内使用,IP20(IEC 529)相对湿度-最高为80%,温度为31°C 下降根据IEC664的安装类别II 在45°C 瞬态过电压线性至33%污染等级2符合IEC664注:NEWALL 测量系统保留更改权利规格,恕不另行通知.安装2.0安装这个符号出现在设备上,并指下文详述的安全问题。
超声多普勒胎儿监护系统 产品技术要求libang

2性能指标2.1安全a)仪器的安全应符合 GB 9706.1-2007《医用电气设备第 1 部分: 安全通用要求》、GB 9706.9-2008《医用电气设备第 2-37 部分超声诊断及监护设备安全专用要求》、GB9706.15-2008《医用电气设备第 1-1 部分安全通用要求并列标准: 医用电气系统安全要求》的要求;b)声输出参数应符合GB9706.9-2008《医用电气设备第2-37 部分超声诊断及监护设备安全专用要求》、GB/T 16846-2008《医用超声诊断设备声输出公布要求》的要求;2.2仪器的电磁兼容要求应符合 YY 0505-2012《医用电器设备第 1-2 部分: 安全通用要求并列标准: 电磁兼容要求和试验》、GB9706.9-2008《医用电气设备第 2-37 部分超声诊断及监护设备安全专用要求》第 36 章节的要求;2.3基本性能指标2.2.1超声工作频率与标称频率 1MHz 的偏差应不大于±10%。
超声工作频率 fW2.2.2胎心率测量和显示范围胎心率的测量和显示范围应为 50 次/min~240 次/min。
2.2.3胎心率测量误差胎心率测量误差应不大于±2 次/min 范围。
2.2.4胎心率分辨率胎心率分辨率应为 1 次/min。
2.2.5报警功能2.2.6仪器应装有发光或发声的报警装置, 在测量胎心率超过预置值时, 应产生报警信号,并可消除警报。
从胎心率越限至开始报警的时间应不大于 30s。
2.2.7宫缩压力测量范围2.2.8宫缩压力的测量范围应覆盖 0~100 单位, 其非线性误差应不大于±10%。
2.2.9电源电压适应能力2.2.10采用交流电源供电的仪器, 在交流 90V~264V 的范围内, 仪器应能正常应能正常工作;2.2.11采用电池供电的仪器, 在电压下降至额定值的 85%时, 仪器应能正常工作。
2.2.12正常连续工作时间对使用交流供电仪器, 在正常交流电压情况下, 仪器连续工作时间应大于 24h;2.2.13对使用电池的无线探头, 在正常直流电压时, 探头连续工作时间大于 8h。
USR-W610 串口服务器说明书_V1.0.3

USR-W610 串口服务器说明书
文件版本:V1.0.3
济南有人物联网技术有限公司
产品特点:
USR-W610 串口服务器说明书.V1.0.3
支持 802.11b/g/n 无线标准
2. 产品概述............................................................................................................................................................... 5 2.1. 产品简介.................................................................................................................................................... 5 2.2. 电气参数.................................................................................................................................................... 5 2.3. 产品外观.................................................................................................................................................... 6 2.4. 工作指示灯................................................................................................................................................ 7 2.5. 接口说明.................................................................................................................................................... 7 2.6. 外观尺寸.................................................................................................................................................... 8 2.7. 应用领域.................................................................................................................................................... 9
新唐科技Nuvo微控制器平台说明书

51 单片机带触摸与液晶驱动、教你轻松实现三种功能新一代低功耗、液晶驱动、触控8051 MCUSpeaker: Jenny6/8议题•新唐科技公司与完整生态系简介•市场发展趋势•HMI解决方案产品组合•应用场景•产品特色介绍•开发工具介绍议题•新唐科技公司与完整生态系简介•市场发展趋势•HMI解决方案产品组合•应用场景•产品特色介绍•开发工具介绍关于我们以崭新思维开创新盛世「Nuvo」在法文中与新(Nouveau) 发音相近;「Ton」在英文中与唐朝的唐(Tang) 发音相近。
唐朝在国际文化交流、经济贸易、科技创新上皆有辉煌的成就,使它成为世界的中心。
秉持卓越发展之创新精神、紧密结合之客户关系。
汇集全球人才,致力于实践新唐愿景。
秉持于芯片产业开创全新大唐盛世的精神,新唐科技致力于成为产业领导者们不可或缺的伙伴。
关于新唐科技2008 年7 月自华邦电子分割逻辑产品线后成立•跨国团队:汇聚全球1,500 名各领域人才。
•创新研发:全球专利获证数超过700 件,每年持续申请至少30 项新专利。
•研发高投入:投资逾20% 的收益于研发,每年推出至少30 项新产品。
•伙伴关系:发展长期客户关系,致力于成为客户值得信赖的伙伴。
资本额•20 亿7500 万新台币(7000万美金)IPO 日期•2010 年9 月27 日(TSE:4919)企业愿景•以绿色半导体技术丰富人类生活的隐形冠军NuMicro®产品完整生态系统NuMicro®微控制器平台议题•新唐科技公司与完整生态系简介•市场发展趋势•HMI解决方案产品组合•应用场景•产品特色介绍•开发工具介绍家用/工业用UI发展趋势強調易用性開關旋鈕家用/工业用UI发展趋势出现人机接口LED数码管TN-LCD玻璃家用/工业用UI 发展趋势人机接口加入触控按键直觉操控•2007年开始推出iPhone 让智能型手机出现巨大的变革,也造就日后家电电容式触控直觉反应的使用者习惯。
11-单元十一 电力线通信系统布线设计与安装技术

11.1电力线通信技术
11.1.4 PLC系统的体系结构
2. PLC的MAC层 (2)MAC层的特性 如图11-8所示,以下4个因素对PLC MAC层及其协议有直接影响: 网络拓扑、干扰、电信服务和采用的传输系统。 PLC接入网的网络拓 扑由低压配电网络的拓扑决定,低压配电网络作为传输介质,具有物 理上的树形布局。然而,为了研究更高的网络层,如MAC层,可以 把PLC接入网看作逻辑总线系统,该系统具有许多使用同一传输介质 与基站通信的网络终端,基站把PLC网络连接到广域网。不同类型噪 声的影响,导致PLC网络中的干扰。使用适当的模型来研究MAC层, 形成PLC接入网中使用的多种电信服务。
图 11-5 PLC用户的直接接入方式
11.1电力线通信技术
11.1.3 PLC接入网
2. PLC网络单元 (3)PLC网关 网关用于将PLC接入网和室内PLC网络分割成两个部分,它同样 也承担了将传输信号在接入和室内应用时所规定的不同频率段间进行 转换的任务。网关通常位于临近房屋的电表单元的附近,如图11-6所 示。不仅如此,PLC网关同时也能确保,用于室内网络连接的PLC调 制解凋器间能够实现内部的相互 通信而不会出现信息流到接入网 中。在这种情形下,一个PLC网 关的功能就如同一个控制室内 PLC网络的逻辑基站,一方面协 调其内部PLC调制解调器间的通 信,另一方面也协调着内部设备 图 11-5 PLC用户的直接接入方式 与PLC接入网间的通信。
CENELEC规范能够提供最高为几千比特每秒的数据传输速率,但 为了支持现代通信网络的各种应用,PLC系统必须能够提供超过 2Mb/s的数据传输速率,才有可能与其他技术进行竞争。为了提供更 高的数据传输速率,PLC传输系统必须工作在最高频率为30MHz的范
EN10160:1999
厚度大于或等于6mm扁平产品的超声波检验方法(反射法)EN10160:1999本殴洲标准于1999年3月3日由CEN批准。
CEN的组员必须遵守CEN/CENELEC的内部规则,该规则规定了在无任何更换的情况下给予该欧洲标准一种国家标准的资格条件。
到目前为止,有关这类国家标准的最新清单和参考摘要可通过向中央秘书处或任何CEN成员申请索取。
本欧洲标准现存叁个正式版本(英文、法文、德文),其它任何不同CEN成员有以下国家的国家标准实体:奥地利、比利时、捷可共和国、丹麦、芬兰、法国、德国、希腊、冰岛、爱尔兰、意大利、卢森堡公国、荷兰、挪威、葡萄牙、西班牙、瑞典、瑞士、英国。
CEN—欧洲标准化委员会前言本欧洲标准由技术委员会ECISS/TC2“钢铁物理化学和无损检验“秘书处(由AFNOR主持)制定。
本欧洲标准将通过最迟于2000年1月的同等内容版本或通过认可的方式被给予国家标准资格,且有冲突的国家标准应于2000年1月前废除。
依照CEN/CENELEC内部规则,下列国家的国家标准组织应执行本欧洲标准:奥地利、比利时、捷克共和国、丹麦、芬兰、法国、德国、希腊、冰岛、爱尔兰、意大利、卢森堡公国、荷兰、挪威、葡萄牙、西班牙、瑞典、瑞士、英国。
本欧洲标准描述了用超声波检验无涂层的扁平产品内部不连续(缺陷)的一个方法。
她适用于公称厚度范围为6mm∽200mm的非合金或者合金钢扁平产品,不包括奥氏体钢或者奥氏体—铁素体钢。
但是,只要噪声信号和回波探测临界值振幅之间的差值相对于规定极限足够大,则此标准可以适用于后面这种类型的钢材。
本标准按照第九条款规定的准则,对扁平产品本体规定了四个质量等级(S o、S1、S2、S3),对边缘规定了五个质量等级(E0、E1、E2、E3、E4)。
对其它的检验方法或检验设备,如果在本标准的条件下可获得同样结果的话,厂家也可以采用。
在有冲突的情况下,仅以本标准定义的方法为准。
厚度小于6mm扁平产品的检验必须经相关方特殊同意。
EN_10160_ZH_厚度等于或大于6mm的钢平板产品超声波试验
第一页:ICS 77.040.20; 77.140.50欧洲标准 EN 10160:1999 具有DIN标准的特色。
国家序言技术委员会ECISS/TC1为这一标准做了充分准备。
第二页:ICS 77.040.20;77.140.50英文版厚度等于或大于6mm的钢平板产品超声波试验在1999年3月3日,CEN通过了这个欧洲标准。
CEN于1991年4月17日核准这项欧洲标准。
CEN成员必须遵守CEN/CENELEC 内部准则,这个准则规定此欧洲标准无需变更并确定为国家标准。
有关该国家标准最新的清单和著书的参考资料可以通过向中心秘书处或任何CEN成员申请获得。
该欧洲标准有三个正式语言版本(英文版、法语版、德语版)。
经由CEN成员翻译成自己的语言并已通报给中心秘书处的其他任何语言版本与正式版本具有同等地位。
CEN成员是以下国家的标准团体,这些国家包括:奥地利,比利时,捷克共和国,丹麦,芬兰,法国,德国,希腊,冰岛,爱尔兰,意大利,卢森堡公国,荷兰,挪威,葡萄牙,西班牙,瑞典,瑞士和大不列颠及北爱尔兰联合王国。
CEN欧洲标准化委员会中心秘书处:rue de Stassart 36,B-1050 布鲁塞尔第三页:目录1 范围 (2)2 标准化参考 (3)3 术语和定义 (3)4 原理 (3)5 人员 (4)6 仪器 (4)7 联结条件——平板产品的表面条件 (6)8 扫描平面图 (6)9 操作步骤 (7)10 验收标准 (8)11 试验报告 (8)附录A同种术语在不同欧洲语言中的描述列表 (12)前言在1999年3月3日,CEN通过了这个欧洲标准。
“钢铁物理化学性质的无损试验”由AFNOR的秘书处主持。
这个欧洲标准将被确定为国家标准,根据CEN/CENELEC内部准则,下列国家的标准组织一定要贯彻这个欧洲标准,分别是:奥地利,比利时,捷克共和国,丹麦,芬兰,法国,德国,希腊,冰岛,爱尔兰,意大利,卢森堡公国,荷兰,挪威,葡萄牙,西班牙,瑞典,瑞士和大不列颠及北爱尔兰联合王国。