电力拖动教案第4章
电力拖动教案

《电力拖动》教案(2008年春季学期)
电动机定子绕组Y、△接法接线盒内部接线图
【任务二】电动机定子绕组Y、△接法时,其绕组上的电压和电流有什电动机启动时接成Y形,加在每相定子绕组上的启动电压只有△接
,启动电流为△接法的1
3
,启动转矩也只有△接法的
这种降压启动方法,只适用于轻载或空载下启动。
时间继电器自动控制的Y-△降压启动线路原理图该线路由三个接触器、一个热继电器、一个时间继电器和两个按钮组成。
接触器KM做引入电源用,接触器KM Y和KM△分别作Y形降压启动用和△运行用,时间继电器KT用作控制Y形降压启动时间和完成Y-△自动切换。
SB1是启动按钮,SB2是停止按钮,FU1作主电路的短路保护,FU2作控制电路的短路保护,KH作过载保护。
线路的工作原理如下:
降压启动:先合上电源开关QF。
KM Y线圈得电KM Y常开触头闭合KM线圈得电
KM
KM
KM Y主触头闭合电动机M接成Y形降压启动
按下SB1。
电力拖动控制线路与技能训练教案全

教案名称:电力拖动控制线路与技能训练教案第一章:电力拖动控制线路概述1.1 教学目标让学生了解电力拖动控制线路的基本概念、组成和作用。
使学生掌握电力拖动控制线路的基本原理和分类。
培养学生对电力拖动控制线路的兴趣和认识。
1.2 教学内容电力拖动控制线路的基本概念电力拖动控制线路的组成和作用电力拖动控制线路的分类及特点1.3 教学方法采用讲授法,讲解电力拖动控制线路的基本概念、组成和作用。
采用案例分析法,分析电力拖动控制线路的分类及特点。
采用小组讨论法,让学生分组讨论电力拖动控制线路的实际应用。
1.4 教学资源教学PPT相关案例资料实物演示设备1.5 教学评价课堂问答:检查学生对电力拖动控制线路基本概念的理解。
小组讨论:评估学生对电力拖动控制线路实际应用的认识。
第二章:电力拖动控制线路的基本原理2.1 教学目标让学生掌握电力拖动控制线路的基本原理。
使学生了解电力拖动控制线路的工作过程。
培养学生运用基本原理分析电力拖动控制线路的能力。
2.2 教学内容电力拖动控制线路的基本原理电力拖动控制线路的工作过程实例分析:典型电力拖动控制线路的原理及应用2.3 教学方法采用讲授法,讲解电力拖动控制线路的基本原理。
采用案例分析法,分析电力拖动控制线路的工作过程。
采用互动教学法,让学生参与讨论典型电力拖动控制线路的应用。
2.4 教学资源教学PPT相关案例资料实物演示设备2.5 教学评价课堂问答:检查学生对电力拖动控制线路基本原理的理解。
实例分析:评估学生对电力拖动控制线路工作过程的认识。
第三章:电力拖动控制线路的分类及特点3.1 教学目标让学生了解电力拖动控制线路的分类。
使学生掌握各种电力拖动控制线路的特点。
培养学生对电力拖动控制线路的认知能力。
3.2 教学内容电力拖动控制线路的分类各种电力拖动控制线路的特点实例分析:常见电力拖动控制线路的应用3.3 教学方法采用讲授法,讲解电力拖动控制线路的分类。
采用案例分析法,分析各种电力拖动控制线路的特点。
电力拖动控制线路与技能训练教案

电力拖动控制线路与技能训练教案第一章:电力拖动控制线路概述1.1 学习目标了解电力拖动控制线路的基本概念掌握电力拖动控制线路的组成及作用熟悉电力拖动控制线路的分类及应用1.2 教学内容电力拖动控制线路的定义与作用电力拖动控制线路的组成电力拖动控制线路的分类及应用1.3 教学方法采用讲解、演示、实践相结合的方式进行教学利用多媒体课件辅助教学,增强学生的直观感受1.4 教学资源教案、多媒体课件电力拖动控制线路实物或模型相关阅读材料1.5 教学评价课堂问答:了解学生对电力拖动控制线路基本概念的掌握情况课后作业:要求学生绘制简单的电力拖动控制线路图,以检验学生对电力拖动控制线路组成及作用的理解第二章:电力拖动控制线路的设计与安装2.1 学习目标掌握电力拖动控制线路的设计原则和方法学会电力拖动控制线路的安装步骤和技巧能够根据实际需求,设计并安装简单的电力拖动控制线路2.2 教学内容电力拖动控制线路的设计原则和方法电力拖动控制线路的安装步骤和技巧设计并安装简单的电力拖动控制线路实例2.3 教学方法采用讲解、演示、实践相结合的方式进行教学利用多媒体课件辅助教学,增强学生的直观感受2.4 教学资源教案、多媒体课件电力拖动控制线路设计软件或仿真工具电力拖动控制线路实物或模型相关阅读材料2.5 教学评价课堂问答:了解学生对电力拖动控制线路设计原则和方法的掌握情况课后作业:要求学生根据实际需求,设计并安装简单的电力拖动控制线路,以检验学生对电力拖动控制线路安装步骤和技巧的理解第三章:电力拖动控制线路的调试与维护3.1 学习目标掌握电力拖动控制线路的调试方法学会电力拖动控制线路的维护技巧能够对电力拖动控制线路进行故障排查和修复3.2 教学内容电力拖动控制线路的调试方法电力拖动控制线路的维护技巧电力拖动控制线路故障排查和修复实例3.3 教学方法采用讲解、演示、实践相结合的方式进行教学利用多媒体课件辅助教学,增强学生的直观感受3.4 教学资源教案、多媒体课件电力拖动控制线路调试工具电力拖动控制线路实物或模型相关阅读材料3.5 教学评价课堂问答:了解学生对电力拖动控制线路调试方法的掌握情况课后作业:要求学生对电力拖动控制线路进行故障排查和修复,以检验学生对电力拖动控制线路维护技巧的理解第四章:电力拖动控制线路的应用实例4.1 学习目标熟悉电力拖动控制线路在实际工程中的应用了解电力拖动控制线路在不同领域的应用实例能够根据实际需求,选择合适的电力拖动控制线路方案4.2 教学内容电力拖动控制线路在实际工程中的应用电力拖动控制线路在不同领域的应用实例选择合适的电力拖动控制线路方案的方法4.3 教学方法采用讲解、演示、实践相结合的方式进行教学利用多媒体课件辅助教学,增强学生的直观感受4.4 教学资源教案、多媒体课件电力拖动控制线路应用实例资料相关阅读材料4.5 教学评价课堂问答:了解学生对电力拖动控制线路在实际工程中应用的掌握情况课后作业:要求学生根据实际需求,选择合适的电力拖动控制线路方案,以检验学生对电力拖动控制线路应用实例的理解第五章:电力拖动控制线路的技能训练5.1 学习目标掌握电力拖动控制线路的基本操作技能学会电力拖动控制线路的调试与维护方法能够独立完成电力拖动控制线路的安装与调试工作5.2 教学内容-第六章:常用低压电器设备6.1 学习目标熟悉常用低压电器设备的结构与原理掌握常用低压电器设备的使用方法了解常用低压电器设备在电力拖动控制线路中的应用6.2 教学内容常用低压电器设备的结构与原理常用低压电器设备的使用方法常用低压电器设备在电力拖动控制线路中的应用实例6.3 教学方法采用讲解、演示、实践相结合的方式进行教学利用多媒体课件辅助教学,增强学生的直观感受6.4 教学资源教案、多媒体课件常用低压电器设备实物或模型相关阅读材料6.5 教学评价课堂问答:了解学生对常用低压电器设备结构与原理的掌握情况课后作业:要求学生绘制常用低压电器设备的使用方法,以检验学生对常用低压电器设备使用方法的理解第七章:电气控制系统图的识读7.1 学习目标掌握电气控制系统图的识读方法学会电气控制系统图的解析技巧能够准确理解电气控制系统图的含义7.2 教学内容电气控制系统图的识读方法电气控制系统图的解析技巧电气控制系统图的应用实例7.3 教学方法采用讲解、演示、实践相结合的方式进行教学利用多媒体课件辅助教学,增强学生的直观感受7.4 教学资源教案、多媒体课件电气控制系统图实例相关阅读材料7.5 教学评价课堂问答:了解学生对电气控制系统图识读方法的掌握情况课后作业:要求学生解析电气控制系统图,以检验学生对电气控制系统图解析技巧的理解第八章:电力拖动控制线路的故障诊断与修复8.1 学习目标掌握电力拖动控制线路的故障诊断方法学会电力拖动控制线路的故障修复技巧能够对电力拖动控制线路进行故障诊断与修复8.2 教学内容电力拖动控制线路的故障诊断方法电力拖动控制线路的故障修复技巧电力拖动控制线路故障诊断与修复实例8.3 教学方法采用讲解、演示、实践相结合的方式进行教学利用多媒体课件辅助教学,增强学生的直观感受8.4 教学资源教案、多媒体课件电力拖动控制线路故障诊断与修复工具电力拖动控制线路实物或模型相关阅读材料8.5 教学评价课堂问答:了解学生对电力拖动控制线路故障诊断方法的掌握情况课后作业:要求学生对电力拖动控制线路进行故障诊断与修复,以检验学生对电力拖动控制线路故障修复技巧的理解第九章:电力拖动控制线路的优化与改进9.1 学习目标掌握电力拖动控制线路的优化方法学会电力拖动控制线路的改进技巧能够对电力拖动控制线路进行优化与改进9.2 教学内容电力拖动控制线路的优化方法电力拖动控制线路的改进技巧电力拖动控制线路优化与改进实例9.3 教学方法采用讲解、演示、实践相结合的方式进行教学利用多媒体课件辅助教学,增强学生的直观感受9.4 教学资源教案、多媒体课件电力拖动控制线路优化与改进工具电力拖动控制线路实物或模型相关阅读材料9.5 教学评价课堂问答:了解学生对电力拖动控制线路优化方法的掌握情况课后作业:要求学生对电力拖动控制线路进行优化与改进,以检验学生对电力拖动控制线路改进技巧的理解第十章:电力拖动控制线路的综合应用10.1 学习目标掌握电力拖动控制线路的综合应用方法学会电力拖动控制线路在不同领域的应用技巧能够根据实际需求,设计并实现电力拖动控制线路的综合应用10.2 教学内容电力拖动控制线路的综合应用方法电力拖动控制线路在不同领域的应用技巧电力拖动控制线路综合应用实例10.3 教学方法采用讲解、演示、实践重点和难点解析1. 第五章至第十章的技能训练环节。
电机与电力拖动基础教程第4章(2)PPT课件
宁波工程学院
4章
返 回 上 页 下14 页
负载运行时基本方程式组
I1Im(I2/k)
U 1E 1I1Z1
U 2E 2I2Z2
E1 kE2 E1 ImZm
Z1=R1+jX1 原绕组漏阻抗 Z2=R2+jX2 副绕组漏阻抗
U2 I2ZL
Zm=Rm+jXm 励磁阻抗 ZL=RL+jXL 负载阻抗
宁波工程学院
Fm F1 F2
宁波工程学院
4章
返 回 上 页 下10 页
磁动势平衡方程式
Fm F1 F2
F1 Fm(F2)
I1N1 ImN1(I2N2)
将I上1 式I两m 边同( 除N N 于1 2NI2 1,) 得I:m(Ik 2)ImI1L
Ì1L= -Ì2/k 为一次侧增加的负载分量电流。
Ì1L+( -Ì2/k) =0
要维持Φm不变,一次绕组产生一个附加电流i1L→产生磁势 N1i1L=N2i2(与二次磁动势相抵消) 一次电流变为 i1=im+i1L 总磁势 F1+F2=N1i1+N2i2 →产生Φm
宁波工程学院
4章
返 回 上 页 下8 页
变压器负载运行时电磁关系
宁波工程学院
4章
返 回 上 页 下9 页
4.3.3 变压器负载运行时的磁动势平衡方程式
下2 页
本章教学基本要求
1.了解变压器的主要结构、基本工作原理及主要额定值 的意义; 2.通过变压器的负载运行分析,深入理解负载运行时变 压器各物理量之间的关系,绕组折算的物理意义及其计 算方法,掌握负载运行时的等值电路、相量图、参数测 定及求解电压变化率和效率,学会分析变压器的运行性 能; 3.熟悉三相变压器的联接组别,并能根据绕组接线图判 别其联接组别或按照已知的联接组别画出绕组的接线图。
《电机与拖动基础》课程教案

日期:
地点: 教
第 2 章
电力拖动系统的动力学基础
第 1 节 典型生产机械的运动形式及转矩
第 2 节 电力拖动系统的运动方程式
第 3 节 多轴电力拖动系统转矩及飞轮矩的折算
第 4 节 负载的机械特性
教学重点:
运动方程式、负载机械特性。
教学难点:
运动方程式。
讲授主要内容:
典型生产机械的运动形式及转矩、电力拖动系统的运动方程式、多轴电力拖动系统转矩及飞轮矩的折算、负载的机械特性等。
本次课主体教学方式、方法:
教师主讲、习题课(第二章内容)
布置作业
思考题:P48 2-1、2-2、2-3、2-4、2-7、补充题
作业: P48 2-9
教学后记
下次从第三章直流电动机的电力拖动讲起。
课程第 7 讲
第 4 周
日期:
地点: 教
第 3 章
直流电动机的电力拖动
第 1 节 他励直流电动机的机械特性
作业:P33 1-3 、 1-4
教学后记
下次从直流机的感应电动势和电磁转矩讲起
课程第 3 讲
第 2 周
日期:
地点: 教
第 1 章
直流电机原理
第 5 节 直流电机的电枢电动势与电磁转矩
第 6 节 直流发电机
第 节
第 节
教学重点:
直流机电枢电动势与电磁转矩、直流发电机基本方程式和工作特性
教学难点:
并励直流发电机自励过程
转子转动时的电磁关系、转子电路、定转字的磁动势平衡关系、折算与等值电路、功率传递与损耗、电磁转矩与转矩平衡关系等。
本次课主体教学方式、方法:
教师主讲
布置作业
思考题:P179 5-23
电力拖动第4章
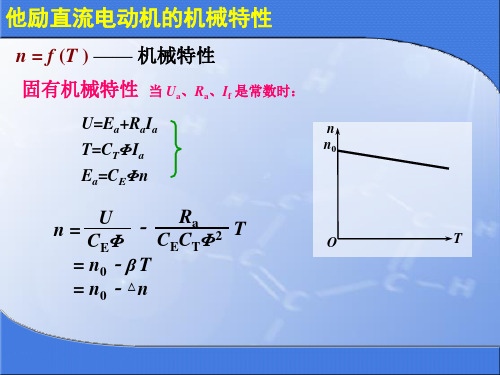
他励直流电机的调速
电气调速方式3——改变电枢电压 ① 调速方向:在 nN 以下 调节。 ② 运转稳定性好,无级调速
调节过程中,电动机机械特性的 硬度不变,可实现无级调速 调速效率高
n
C E N
UN
Ra
2 C E CT N
T
n
n0 n01 n02 O
<
UN
<
UN1
UN2
TL
T
P1=PCua+PM
3. 平滑性 无级调速: 转速连续可调,级数趋于无穷多是,平滑系数趋近于1。
ni k ni 1
4. 经济指标
调速的性能指标
5. 恒转矩和恒功率的调速方式与负载类型的配合 • 恒转矩调速: CTI a 常数, I T
a
IN
串电阻和变电枢电压调速时,Φ不变,且Ia=IN不变, T CT I N T与n无关,所以称它们为恒转矩调速
If '
If T
<
②调整范围不大,基速与最高转速之间 O nmax=1.2nN ~1.5nN ③ 适用于恒功率负载
恒转矩负载 常数=T=CTΦIa Φ ,电枢电流Ia ,容易过载。
恒功率负载 常数=TΩ, n , Ω ,所以T , 又T=CTΦIa,电枢电流Ia 。
例 3
一台他励电动机, PN = 4 kW,UN = 160 V,IN = 34.4 A,nN = 1 450 r/min , 用它拖动恒功率负载运行, (忽略空载转矩) 现采用改变励磁电流调速。试问要使转速增加至 1 800 r/min, CEΦ 应等于多少 ?
nN
U
Ra Ra+Rst1=R1
S1 S2
《电力拖动》第4章
∫
四、减少异步电动机过渡过程能量损耗的方法
(一)减少拖动系统的动能储存量 JΩ 2 / 2
(二)合理选择电动机的起、制动方式 合理选择电动机的起、 (三)合理选择电动机的参数 [例11-5]一台四速异步电动机的四个同步转速为:3000、1500、 11- 一台四速异步电动机的四个同步转速为: 1000及500 r/min。试计算空载直接起动(n=0~3000 r/min)和分级 及 。试计算空载直接起动( ) 起动( 时电动机的能量损耗。 起动(n=0经500,1000,1500到3000 r/min )时电动机的能量损耗。 经 到 如果电力拖动系统的转动惯量 J = 0.98kg ⋅ m 2 ′ R1 / R2 = 1.5 固定损耗可以忽略。 固定损耗可以忽略。 解 (1)空载直接起动时电动机的能量损耗 )
TQ − TL TX − TL
为过渡过程的中间值 中间值; 为从起始点Q到中间点X XX为过渡过程的中间值;tQX为从起始点Q到中间点X所经历的时间
理论上讲t趋于无穷时才能达到稳态,但实际上认为t (3~ 时系统已经基本进入稳态。 注意 理论上讲t趋于无穷时才能达到稳态,但实际上认为t=(3~4)Tm时系统已经基本进入稳态。
nQ ——过渡过程开始时转速的起始值 过渡过程开始时转速的起始值 过渡过程开始时转速的
nW ——机械特性上负载转矩 Tz(或负载电流 I z )对应的转速, 对应的转速, 机械特性上负载转矩
即过渡过程结束时电动机的稳定转速,即转速的稳态值 稳态值。 即过渡过程结束时电动机的稳定转速,即转速的稳态值。
粗略地可忽略I0,则 粗略地可忽略
R1 ′ ′ ∆W = ∫ 3I 2 R2 1 + dt 0 R2 ′ ′ 由于 T = (3I 22 R2 / s ) / Ω s ′ ′ 3I 22 R2 = T Ω s s
电机及电力拖动课程《教案》

电机及电力拖动课程《教案》第一章:电机的基本概念与分类1.1 电机的定义与作用解释电机的概念阐述电机在电力系统中的重要性1.2 电机的分类交流电机和直流电机的区别同步电机、异步电机、变压器等的主要特点1.3 电机的基本原理电磁感应原理电机的能量转换过程1.4 电机的主要性能参数功率、电压、电流、转速等参数的定义及计算效率、转矩、功率因数等性能指标的含义第二章:直流电机2.1 直流电机的基本结构与工作原理分析直流电机的主要组成部分解释直流电机的工作原理2.2 直流电机的类型及特点直流发电机、直流电动机的区别与联系串励直流电机、并励直流电机、复励直流电机的特点2.3 直流电机的换向与实现方法换向的概念及换向过程换向装置的类型及作用2.4 直流电机的调速方法串电阻调速、电枢电流调速、脉冲宽度调速等方法的原理及特点第三章:交流电机3.1 交流电机的基本结构与工作原理分析交流电机的主要组成部分解释交流电机的工作原理3.2 交流电机的类型及特点异步电机、同步电机、变压器等的主要特点及应用领域3.3 交流电机的运行特性启动、制动、调速等运行特性的定义及分类交流电机在不同运行状态下的性能表现3.4 交流电机的控制方法磁场控制、电压控制、频率控制等方法的原理及应用第四章:电力拖动系统4.1 电力拖动系统的组成及分类电动机、传动装置、控制器等组成部分的作用电动机拖动系统、液压拖动系统、气压拖动系统的特点4.2 电动机的基本控制电路启动、制动、调速等基本控制电路的原理及应用4.3 电力拖动系统的设计与选择电动机选型、传动装置选型、控制器选型的依据及方法4.4 电力拖动系统的运行与维护系统运行中的监测与故障诊断系统维护与保养的重要性及方法第五章:电机及电力拖动的保护与节能5.1 电机保护的原理与措施过载保护、短路保护、过电压保护等保护方式的原理及应用5.2 电机故障诊断与维修故障诊断的方法及步骤维修技术及注意事项5.3 电力拖动系统的节能措施优化控制策略、改进传动装置、提高电动机效率等节能方法5.4 电机及电力拖动技术的最新发展趋势高效节能电机、智能电机、电动汽车等领域的研发动态第六章:电机及电力拖动的应用案例分析6.1 电机在工业生产中的应用案例电机在机械制造、冶金、化工等行业中的应用实例6.2 电机在交通运输领域的应用案例电机在汽车、电车、船舶等交通工具中的应用实例6.3 电机在生活中的应用案例电机在家用电器、医疗器械等日常用品中的应用实例6.4 电机在新能源领域的应用案例电机在风力发电、太阳能发电、电动汽车等新能源领域的应用实例第七章:电机及电力拖动的试验与检测7.1 电机试验的目的与方法阐述电机试验的重要性介绍电机试验的常用方法及设备7.2 电机性能检测功率、效率、转速等性能指标的检测方法及设备7.3 电机故障检测与诊断介绍电机故障检测与诊断的方法及设备7.4 电力拖动系统的试验与检测电力拖动系统的性能试验、适应性试验等方法及设备第八章:电机及电力拖动的仿真与优化8.1 电机及电力拖动仿真的意义与方法解释电机及电力拖动仿真的作用介绍电机及电力拖动仿真的常用方法及软件8.2 电机参数的优化与设计优化电机参数的方法及目的8.3 电力拖动系统的优化与控制优化电力拖动系统控制策略的方法及目的8.4 电机及电力拖动系统的计算机辅助设计介绍计算机辅助设计在电机及电力拖动领域的应用第九章:电机及电力拖动的实训操作9.1 电机的基本操作与维护电机的安装、调试、运行、停机等基本操作电机维护与保养的方法及注意事项9.2 电力拖动系统的实训操作电力拖动系统的接线、调试、运行等实训操作9.3 电机及电力拖动的故障排除与维修分析电机及电力拖动系统的常见故障介绍故障排除与维修的方法及技巧9.4 电机及电力拖动的实训项目案例分析电机及电力拖动实训项目案例,提高实际操作能力第十章:电机及电力拖动的评价与展望10.1 电机及电力拖动的评价指标阐述评价电机及电力拖动性能的指标及方法10.2 电机及电力拖动技术的展望分析电机及电力拖动技术的发展趋势10.3 电机及电力拖动技术的市场前景分析电机及电力拖动技术在各个领域的市场需求10.4 电机及电力拖动教育的改革与发展探讨电机及电力拖动教育在人才培养、课程设置等方面的改革与发展方向重点和难点解析一、电机的基本概念与分类:理解电机的工作原理和电机分类是学习电机及电力拖动的基础。
电力拖动教案

河南经济贸易高级技工学校教案利用机械装置使电动机断开电源后迅速停转的方法叫机械制动。
机械制动常用的方法有电磁抱闸制动器制动和电系列交流制动电磁铁与TJ2系列闸瓦制动器的外形(见课本图-弹簧 2-衔铁 3-线圈 4-铁心 5-闸轮系列闸瓦制动器与MZD1系列交流制动电磁铁的配用表见课本表、电磁铁和制动器的型号MZD1-100 MZD1-200TJ2-100 TJ2-200/100制动电磁铁由铁心、衔铁和线圈三部分组成。
闸瓦制动器包括闸轮、闸瓦、杠杆和弹簧等部分。
电磁抱闸制动器分为断电制动型和通用制动型两种。
断电制动型的工作原理是:当制动电磁铁的线圈得电时,制动器的闸瓦与闸轮分开,无制动作用;当线圈失电时,制动器的闸瓦紧紧抱住闸轮制动。
通电制动型的工作原理是:当制动电磁铁的线圈得电时,闸瓦紧紧抱住闸轮制动;当线圈失电时,制动器的闸瓦与闸轮分开,无制动作用。
、电磁抱闸断电制动控制线路电磁抱闸断电制动控制线路在起重机械上被广泛应用。
其优点是能够准确定位。
同时可防止电动机突然断电时重物自行坠落。
其缺点是由于电磁抱闸制动器线圈耗电时间与电动机一样长,不够经济,同时抱闸制动器在切断电源后的制动作用,使手动调整工作很困难。
电磁抱闸断电制动控制线路如下图所示:,按下SB1,KM线圈得电,KM1主触头和自锁触头闭合,自锁,电动机线圈得电,衔铁与铁心吸合,衔铁克服制动杠杆抽上移动,从而使抱闸的闸瓦与闸轮分开,线圈失电释放,其自锁触头和主触头分断,电动机也失电,衔铁与铁心分开,在弹簧的作用下,闸瓦紧紧抱住闸轮,使电动机被迅速制动而停转。
对要求电动机制动后能调整工件位置的机床设备,可采用通电制动控制线路如下图所示:与断电制动稍有不同的是:当电动机得电运转时,电磁抱闸制动器线圈断电,闸瓦与闸轮分开,无制动作用;当电动机失电需停转时,电磁抱闸制动器的线圈得电,使闸瓦紧紧抱住闸轮制动;当电动机处于停转常态时,线圈也无电,闸瓦与闸轮分开,这样操作人员可以用手扳动主轴进行调整工件、对刀等操作。
电力拖动技术课程设计
电力拖动技术课程设计一、课程目标知识目标:1. 理解电力拖动技术的基本原理,掌握电机的工作特性及相应的控制方法;2. 掌握电路图的识图方法,能正确分析电力拖动电路图;3. 了解电力拖动的应用领域,如工业控制、交通运输等。
技能目标:1. 能够运用所学的电力拖动知识,设计简单的控制电路;2. 能够对电力拖动系统进行故障分析和排除;3. 能够运用电力拖动技术,完成实际工程问题的解决方案设计。
情感态度价值观目标:1. 培养学生对电力拖动技术的兴趣,激发其探索精神和创新意识;2. 增强学生的团队合作意识,培养其沟通协调能力;3. 提高学生对我国电力拖动技术发展的认识,增强民族自豪感。
课程性质:本课程为专业技术课程,以实践操作和理论学习相结合的方式进行。
学生特点:学生具备一定的电子电工基础知识,具有较强的动手能力和学习兴趣。
教学要求:结合学生特点,注重实践操作,强调理论知识与实际应用相结合,提高学生的实际操作能力和问题解决能力。
通过课程学习,使学生能够掌握电力拖动技术的基本知识和技能,为后续相关课程的学习和实际工作打下坚实基础。
二、教学内容1. 电力拖动技术基本原理:包括电机的工作原理、电机类型及特性、电力拖动系统组成等,对应教材第一章内容。
2. 电路图识图与分析:教授电路图的识图方法、电路元件的作用及其相互关系,分析典型电力拖动电路图,对应教材第二章内容。
3. 电力拖动控制技术:介绍常见的控制电路及其工作原理,如继电器控制、PLC控制等,对应教材第三章内容。
4. 电力拖动系统设计与应用:讲解电力拖动系统在实际工程中的应用,如电梯、机床等,并进行案例分析和设计实践,对应教材第四章内容。
5. 故障分析与维修:分析电力拖动系统常见故障原因,教授故障排除方法,提高学生的问题解决能力,对应教材第五章内容。
6. 实践操作:安排学生进行电力拖动实验,巩固所学知识,提高动手能力,对应教材第六章内容。
教学内容安排与进度:第1-2周:电力拖动技术基本原理;第3-4周:电路图识图与分析;第5-6周:电力拖动控制技术;第7-8周:电力拖动系统设计与应用;第9-10周:故障分析与维修;第11-12周:实践操作。
电机与拖动教案
章节 名称 教学 目的 教学 重点 教学 难点 辅助 手段 参考 资料 课后 体会
第二节直流电机的基本工 作原理
授课 课 形式 讲练 时
班级 2 日期
掌握直流电机的基本工作原理 复习电磁感应定律 直流电机的基本工作原理 直流电机的基本工作原理 课外 作业 1-1
学生对工作原理不能较好地理解与分析
第二节 直流电机的基本工作原理 任何电机的工作原理都是建立在电磁感应和电磁力这个基础上的。 为了讨论直流 电机的工作原理,我们把复杂的直流电机结构简化为工作原理图。 一、直流发电机的工作原理 在电工课程中,我们已经知道在磁场中运动的导体内,将产生感应电动势—— 电磁感应定律。发电机就是应用这个定律工作的。 上图所示的是一台两磁极直流发电机的工作原理图。图中 N 和 S 是一对静止的 磁极,用以产生磁场,其磁感应强度沿圆周为正弦分布。容量较小的发电机是用永久 磁铁做磁极的。 容量较大的发电机的磁场是由直流电流通过绕在磁极铁心上的绕组产 生的。用来形成 N 极和 S 极的绕组称为励磁绕组,励磁绕组中的电流称为励磁电流 If 。
章节 名称 教学 目的 教学 重点 教学 难点 辅助 手段 参考 资料 课后 体会
第一章 第一节
直流电机 概述
授课 形式
课 讲练 时
1
班级 日期
掌握电机的分类 掌握交、直流电动机的性能的比较 掌握电机的分类 交、直流电动机的性能的比较 课外 作业 1、说明电机的分类 2、比较交、直流电动 机的性能
学生能较好地理解与掌握
章节 名称 教学 目的 教学 重点 教学 难点 辅助 手段 参考 资料 课后 体会
第三节 直流电机的结构 掌握直流电机的结构 掌握直流电机的组成及作用 掌握电机的分类
授课 形式
电机及电力拖动课程《教案》

电机及电力拖动课程《教案》第一章:电机的基本概念1.1 电机的定义与分类1.2 电机的工作原理1.3 电机的性能参数1.4 电机的优缺点分析第二章:直流电机2.1 直流电机的基本结构2.2 直流电机的工作原理2.3 直流电机的特性2.4 直流电机的应用实例第三章:交流电机3.1 交流电机的基本结构3.2 交流电机的工作原理3.3 交流电机的特性3.4 交流电机的应用实例第四章:电力拖动系统4.1 电力拖动的基本原理4.2 电力拖动系统的分类4.3 电力拖动系统的性能分析4.4 电力拖动系统的应用实例第五章:电机与电力拖动的控制技术5.1 电机控制技术的基本概念5.2 电机控制技术的分类5.3 电机控制技术的应用实例5.4 电机控制技术的发展趋势第六章:电机的设计与制造6.1 电机设计的基本原则6.2 电机参数的计算与选择6.3 电机制造工艺及流程6.4 电机性能的测试与检测第七章:电机故障诊断与维修7.1 电机故障的类型及原因7.2 电机故障诊断的方法7.3 电机维修的基本工艺7.4 电机故障案例分析与维修实例第八章:电力电子技术在电机控制中的应用8.1 电力电子器件及其特性8.2 电力电子变换器及其控制8.3 电力电子技术在电机调速中的应用8.4 电力电子技术在电机节能中的应用第九章:电机及电力拖动的保护与节能9.1 电机保护的原理与方法9.2 电机保护装置及其应用9.3 电力拖动的节能技术9.4 电机节能案例分析与应用第十章:电机及电力拖动在现代工业中的应用10.1 电机及电力拖动在制造业中的应用10.2 电机及电力拖动在交通运输中的应用10.3 电机及电力拖动在电力系统中的应用10.4 电机及电力拖动在新能源领域的应用重点解析本教案涵盖了电机及电力拖动课程的十个章节,全面介绍了电机的基本概念、结构、工作原理、性能参数、优缺点、控制技术、设计制造、故障诊断与维修、保护与节能以及在现代工业中的应用等方面的知识。
电力拖动控制线路与技能训练教案 第四单元 课题一教材
实训(实验、一体化)授课教案教法提高了产品的质量与数量变频器不仅应用于工业、交通领域,而且已进入家庭,在家电工业领域,空调器、电冰箱都有了变频器控制的相应产品,提高了家电产品的经济技术指标和智能化水平。
随着现代化的程度提高,对变频器的应用会更加普及。
2、变频器及其分类(一)变频器是一种利用电力半导体器件的通断作用,将工频交流电源变换成频率、电压连续可调的电能控制装置。
2、变频器的分类(1)按其供电电压分:低压变频器 ( 110V 220V 380V ) 中压变频器 ( 500V 660V 1140V ) 高压变频器 ( 3kV 3.3kV 6kV 6.6kV 10kV )。
(2)按供电电源的相数分:单相输入变频器、三相输入变频器。
(3)按直流电源的性质分:电流型变频器、电压型变频器。
(4)按主开关器件分:IGBT变频器GOT变频器GTR变频器(5)按变换环节分:交-直-交变频器交-交变频器(6)按输出电压调制方式分:PAM(脉幅调制)控制变频器PWM (脉宽调制)控制变频器(7)按机壳外型分:塑壳变频器铁壳变频器柜式变频器(8)按控制方式分:U/f控制变频器转差频率控制变频器矢量控制变频器(9)按其商标所有权分:国产变频器台湾变频器进口变频器(10)按输出功率大小分:小功率变频器中功率变频器大功率变频器(11)按用途分:通用变频器高性能专用变频器高频变频器二、通用变频器的基本结构目前,通用变频器的变换环节大多采用交-直-交变频变压方式。
交-直-交变频器是先把工频交流电通过整流器变成直流电,然后再把直流电逆变成频率、电压连续可调的交流电。
教法1、变频器的主电路交—直—交变频器的主电路2、变频器的控制电路(1)主控板:变频器运行的控制中心,其核心器件是微控制器(单片微机)或数字信号处理器(DSP)(2)键盘与显示板键盘与显示板总是组合在一起。
键盘是向主控板发出各种信号或指令, 主要用于向变频器发出运行控制指令或修改运行数据等(3)电源板与驱动板变频器的内部电源普遍使用开关稳压电源(4)外接控制电路外接电路可实现由电位器、主令电器、继电器及其他自控设备对变频器的运行控制,并输出其运行状态、故障报警、运行数据信号等三、外观介绍1、变频器的型号:教法 2、外观和结构四、操作方法 1、操作面板图示2、各键功能及各显示含义教法 3、通过MODE 键改变显示模示4、相关监示(1)监示器显示运转中的指令EXT 指示灯亮表示外部操作; PU 指示灯亮表示PU 操作;EXT 和PU 灯同时亮表示PU 和外部操作组合方式。
电力拖动教案
电工实习管理安全制度1、学生在校实习期间,必须遵守学校一切规章制度,服从实习老师和实习指导老师的管理,听从安排,讲文明,讲礼貌,对无理顶撞老师和师傅经教育不改者给以相应处分。
2、遵守实习工场的劳动纪律,有事必须履行请假手续,请假一天者由班主任批准,并凭班主任批准的假条进行记载;请假两天以上者由学生处批准。
未按此规定请假者作旷课论。
3、进入车间实习时.必须穿工作服或紧身服,袖口要扎紧,不准穿凉鞋、拖鞋、裙子,戴围巾进车间,女同学必须戴工作帽,将长发或辫子纳入帽内。
4、严禁在实习工场内追逐、打闹、喧哗,走路时要当心。
5、未经同意不准私自启动实习工场内的总电源和工作台上的开关。
6、教师进行实习指导时,必须服从组织安排,注意听讲,不得随意走动、不得随意说话,不许打闹或擅自离工作岗位。
7、工具应放在适当的位置并且看护好工具,以免损坏、丢失,禁止使用工具进行不确当的动作。
8、操作时必须思想集中,不准与别人谈话、阅读书刊,并不得任意改变工作岗位或离开实习工场。
9、实习过程中必须严格遵守安全操作规程,切实注意人身安全和仪器、仪表设备完好。
10、一般禁止带电作业,必须带电作业时或通电试车时,要经实习教师同意,并在实习教师的监督下进行通电试车。
11、每项课题完成后,学生应上交实习指导书,由指导教师批阅,得分作为学生平时成绩。
12、实习结束时所有电气设备均应切断电源,关掉实习工位电源总开关。
实习结束前要清理好自己的工位、设备及周围的卫生。
13、实习结束后学生整理工作场地、保养及维护工具及设备,归还借用器材后,教师清查学生人数,并实施讲评,养成学生良好工作习惯。
14、元件一律登记造册,领用必须及时归还,损坏照价赔偿。
15、个人使用的器材应妥为保管,如有遗失应进行赔偿。
16、凡个人所有的电气设备,不得带到实习工场修理。
17、未经允许,非实习班级学生不得随意进入实习工场。
18、学生实习未依上列各项规定而违反者,依情节轻重给予一定的处分,若致设备之损坏或自身、他人身体之伤害者,应一切后果自负。
电力拖动教案4
电力拖动教案4江苏省扬州技师学院教案首页授课日期班级09高机电(3)课题:第二单元课题一三相异步电动机的正转控制线路(一)教学目的、要求:熟悉绘制、识读电路图、布置图、接线图的原则;熟知手动、点动正转控制线路的构成、工作原理;能正确熟练地安装、维修、调试电路。
教学重点、难点:绘制电路图的原则;手动、点动正转电动机的控制线路授课方法:讲授法、演示法教学参考及教具(含电教设备):自制电路演示板授课执行情况及分析:完成此次教学任务教学过程及时间分配主要教学内容教学方法运用复习提问板书板书引入(10min)1:什么叫热继电器?热继电器由哪几部分构成?新授(15min)2:简述双金属片式热继电器的工作原理?3:热继电器为什么在电动机启动或短时过载时不动作?4:热继电器与熔断器能否互换?5:什么叫速度继电器?其主要作用是什么?课题一三相异步电动机的正转控制线路任何复杂的控制线路都是由一些基本的控制线路有机地组合起来的,常见的基本控制线路有:点动控制线路、正转控制线路、正反转控制线路、位置控制线路、顺序控制线路、多地控制线路、降压启动控制线路、制动控制线路、调速控制线路等。
一:手动正转控制线路手动正转控制线路是通过低压开关来控制电动机单向启动和停止的电路。
1:电路图FUL1L2L3U11V11W11QF边画图边详细讲解UVWPEM3~2:工作原理启动:合上断路器QF→电动机M接通电源启动运转;停止:断开断路器QF→电动机M脱离电源停止运转。
江苏省扬州技师学院第10—1页教学过程及时间分配(20min)L1L2L3主要教学内容3:用负荷开关、组合开关控制的电路图QS—FUU11V11W11L1L2L3FUU11QSV11W11教学方法运用演示电路演示UVWPEM3~PEUVWM3~二:点动正转控制线路1:点动的定义:所谓点动就是按下按钮电动机得电运转,松开按钮电动机就失电停转的控制方法。
2:电路图L1L2L3QFU11V11W11FU1U12V12W12KMSBFU2板书边画图边详细讲解UVWPEKMM3~3:工作原理合上电源开关QF启动:按下SB→KM线圈得电→KM主触头闭合→电动机M得电运转;停转:松开SB→KM线圈失电→KM主触头断开→电动机M失电停转;江苏省扬州技师学院第10—2页。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第四章 异步电动机原理§4-1 基本工作原理与结构一、异步电动机的基本工作原理·原理:定子旋转磁场以速度n0切割转子导体感生电动势(发电机右手定则), 在转子导体中形成电流,使导体受电磁力作用形成电磁转矩, 推动转子以转速n 顺n0方向旋转 (电动机左手定则),并从轴上输出一定大小的机械功率。
(n 不能等于n0)特点:·电动机内必须有一个以n0旋转的磁场。
-实现能量转换的前提;·电动运行时n 恒不等于n0(异步)-必要条件n<n0;·建立转矩的电流由感应产生。
-感应名称的来源。
U U V V W W 111222U 1V W W U 2V 1122绕组空间位置转子绕组展开图(星形联接)ii ui vi wi uωt32π34π2π三相电流波形NSn 0n 异步电动机模型笼型转子U U V V W W 111222ωt =Iu=ImU U V V W W 111222ωt =2π3Iv=ImU U V V W W 111222ωt =4π3Iw=Im·空间120度 对称分布的三相绕组通过三相对称的交流电流时,产生的合成磁场为极对数p=1的空间旋转磁场,每电源周期旋转一周,即两个极距;·某相绕组中电流达到最大值时,磁极轴线恰好旋转到该相绕组轴线上。
·每相空间对称分布串联线圈数增加,合成磁场磁极对数也增加: 例:由3个线圈增加到6个,依次滞后60度机械角度对称分布:U U V V W W 11111121221UVW绕组空间位置U 12V 12W 12U 22V 22W 21W 22P=2绕组展开图(Y联接)U V W 111111U 12V 12W 12U U 2122V 21V 22W 21W 22U U V W W 2212221212ωt =0U 11U 21V W V V W 1111212122U U V W W 2212221212ωt =U 11U 21V W V V W 111121212232πU U V W W 2212221212ωt =U 11U 21V W V V W 111121212234πU U V W W 2212221212ωt =2πU 11U 21V W V V W 1111212122·p=2时,电源电压变化一周,磁场在空间旋转半周,即180度机械角度; 对应电角度仍为00360180=⨯p 。
结论:·空间对称分布的多相绕组,流过时间上对称的多相电流时,合成磁通势为旋转磁通势,由此磁通势建立的磁场为旋转磁场。
·定子绕组的主要功能:建立旋转磁通势。
重要结论:交流电机中的合成磁场旋转速度min]/[600r p f n = ,f 为电源频率。
二、 基本结构〖阅读〗三、 铭牌数据·额定功率N P :额定运行状态下的轴上输出功率,单位:kW 。
·额定电压N U :额定运行状态下加在定子绕组上的线电压,单位:V 。
·额定电流N I :额定运行状态下电动机定子绕组的线电流,单位:A 。
·额定转速N n :额定运行状态下电动机的转速,单位:r/min 。
·额定频率N f :电动机电源电压标准频率。
NN N N N I U P ηφcos 3=§4-2 三相异步电动机的定子绕组与磁势(mR F φ=)目标:定量分析确定三相合成磁势的数学表达式-旋转磁场的理论定量分析,为确定电动机的电磁转矩大小和方向作准备。
一、 一相定子绕组及其磁通势取p=1,U 相绕组为例:绕组匝数Ny,通过电流t sin I i m y ω=每磁感应线磁路磁势y y N i F =;忽略铁心磁压降,认为气隙均匀,则气隙中磁势处处相等:t sin N I 21N i 21F y m y y y ω==。
SNU U 12yI m NS F τxNU U U 121mi y=I m瞬间空间脉振磁势波形t磁势空间位置固定、幅值随电流按正弦规律不断改变其大小和符号: 空间脉振磁势。
机电角度的换算:P=1时,τ2机械弧度相当于π2电弧度所以:x 机械弧度相当于τπx 电弧度,即机械弧度x 为一个极踞时电弧度等于π。
将myI i =瞬间的空间矩形波磁势按级数展开[参考文献1、p192],得)x 5cos 51x 3cos 31x (cosIN 9.0 )x 5cos 51x 3cos 31x (cosIN 224F y y m -τπ+τπ-τπ=-τπ+τπ-τππ=I 为电流有效值:t sin I 2i ω=。
结论:一相定子绕组流过正弦电流时在气隙中产生的磁势为脉振磁势:t sin )x 5cos 51x 3cos 31x (cosIN 9.0 t sin )x (F )t ,x (F y ym y ω-τπ+τπ-τπ=ω=x-2ττ23τ2FymFy1Fy3Fy5τFym(x)矩形磁通势波的基波及3,5次谐波分量存在问题:集中整距绕组→磁势、磁场为矩形分布→转子感应电势畸变→性能↓对策:单层分布绕组→抑制高次谐波→磁势、磁场接近正弦波:1、 单层整距分布绕组将原集中在一个槽内的线圈边分布到相邻的q 个槽内:定子绕组相数定子总槽数p 2pm2Z q ss ==a :槽距角:相邻两槽间弧长对应的电角度sZ360p =a ;U 1U 2V 1W 1W 2V 2集中整距绕组234567890123456781U 1U 2整距分布绕组ααRαqαF F F F 112131qm1F F F 112131F qm1=2Rsin 2q αF y1=F 21=2Rsin2αq:每极每相槽数α:槽距角基波:11112sin2siny q y qm qF K q q qFF ⨯==ααv 次谐波磁势最大值:yv qv yvqmv qF K vq q vqF F ⨯==2sin 2sin αα ;v=3、5、7、···12sin 2sin <=ααvq q vK qv结论:采用整距分布绕组后,线圈组基波、谐波磁势幅值均下降,下降比例等于qi K ;谐波磁势下降比例远大于基波。
合成磁势较接近正弦波。
2、 双层短距分布绕组双层短距绕组→进一步抑制高次谐波:y 11上1'22'τ极距τfy02π3π2θe3π2θeπ2fyiNy单相双层短距线圈产生的磁通势1下1下y 11上1'22'τ极距τ1下等效为整距绕组Fqm1下Fqm1上Fqy1Fqm1上Fqm1下Fqy1εε短距角:极距τ与线圈跨距y1之差: ⎪⎭⎫ ⎝⎛-=τπε1y 1基波短距系数:2cosKy1ε= ;V次谐波短距系数:2cos Kyvεv=。
1y yvKK<<,高次谐波磁势被显著减小。
基波短距分布绕组系数:1N K==y1q1qy1KKK线圈匝数:Ny ;分布:q ;层:2;磁极对数:p 。
一相总串联匝数()y 12qN p =N 一相绕组基波磁势幅值:I N I N N m pK=pK N F 111119.0224π=二、 交流电动机绕组磁通势的性质 1、 一相绕组基波磁势:t x F t x F m ωτπsin cos),(11=是一个空间呈余弦分布、幅值随时间按正弦规律变化的脉振磁势。
分析:利用三角公式()),(),(sin sin2,1111t x F t x F x t x t F t x F R F m +=⎥⎦⎤⎢⎣⎡⎪⎭⎫⎝⎛++⎪⎭⎫ ⎝⎛-=τπωτπω 性质:·空间呈正弦分布·幅值为常数;令正弦值=1,可得波顶(幅值)运动方程 ⎪⎭⎫⎝⎛-±=2πωπτt x·波顶运动线速度:fdtdx v τπωτ2±=±==[米/秒]·波顶旋转速度:]/[602260600分转pf p f D v n F ===ττπ]/[600分转pf n R -=结论:一相绕组所建立的脉振磁势可分解成两个旋转磁势,幅值均为脉振磁势幅值的一半,转速相同(pf n 600=[r/min]),方向相反。
2、 三相绕组合成磁通势的性质UVW2π34π32ππτx三相集中绕组空间位置示意图·旋转磁场源于空间对称分布的三相绕组中流过三相电流形成的合成旋转磁势。
假定)32sin()32sin(sin πωπωω+=-==t t tI i I i I i m w m v m u 则三相绕组的基波磁势为:)32sin()32cos(),()32sin()32cos(),(sin cos),(111111πωπτππωπτπωτπ++=--==t F t x F t F t x F tF t x F m W m V m U将它们分解成两个旋转磁势:()⎥⎦⎤⎢⎣⎡⎪⎭⎫ ⎝⎛++⎪⎭⎫ ⎝⎛-=x t x t F t x F m U τπωτπω sin sin 2,11()⎥⎦⎤⎢⎣⎡⎪⎭⎫ ⎝⎛-++⎪⎭⎫ ⎝⎛-=32sin sin 2,11πτπωτπωx t x t F t x F m V ()⎥⎦⎤⎢⎣⎡⎪⎭⎫ ⎝⎛+++⎪⎭⎫ ⎝⎛-=32sin sin 2,11πτπωτπωx t x t F t x F m W三相绕组的基波合成磁势为:)sin()sin(),(),(),(),(111111x t F x t F t x F t x F t x F t x F sm m w V U s τπωτπω-=-=++= 23I pKN F F N m sm 111135.123==三相的三次谐波磁势:对应基波的一个极距,三次谐波已经是3个极距:)32sin()32(3cos ),()32sin()32(3cos ),(sin 3cos ),(333333πωπτππωπτπωτπ++=--==t F t x F t F t x F tF t x F m W m V m U ---]32sin )32sin([sin 3cos ),(),(),(),(33333=⎪⎭⎫ ⎝⎛++-+=++= πωπωωτπt t t x F t x F t x F t x F t x F m w V U s -·各相三次谐波磁势的空间位置相同,因三相电流在时间上互差120度电角度,使三相合成三次谐波磁势为0。
·推论:三的倍数次谐波磁势都为0。
其余5、7次谐波磁势,由于采用分布、短距绕组已被削弱到极小,所以三相绕组产生的磁势可以忽略谐波分量。
),(1t x F s 的性质:·空间正弦分布、幅值固定、以pf n 600=旋转。