What Is a Good Image Segment_A Unified Approach to Segment Extraction
计算机视觉期末考试题及答案

计算机视觉期末考试题及答案一、选择题1. 下列哪个是计算机视觉的基本任务?A. 物体识别B. 图像去噪C. 特征提取D. 图像压缩答案:A2. 图像分割的目标是什么?A. 将图像分成若干不重叠的区域B. 提取图像中的边缘和角点C. 对图像进行降噪处理D. 对图像进行缩放和旋转答案:A3. 下列哪个不属于计算机视觉中的特征提取方法?A. 边缘检测B. 霍夫变换C. SIFTD. 形态学操作答案:D4. 目标识别中最常用的算法是?A. 支持向量机(SVM)B. 卷积神经网络(CNN)C. 决策树D. 随机森林答案:B5. 计算机视觉中的光照问题指的是什么?A. 图像中的曝光问题B. 图像中的阴影和反射问题C. 图像中的亮度和对比度问题D. 图像中的色彩平衡问题答案:B二、填空题1. 图像的分辨率是指图像中的像素数量()图像的单位面积。
答案:除以2. 特征匹配算法中常用的匹配度量指标是()。
答案:距离3. 边缘检测算法中,经典的Sobel算子是基于()的。
答案:梯度4. 目标检测中的非极大值抑制是用来()。
答案:过滤掉重复的检测结果5. 目标跟踪中最常用的方法是()。
答案:卡尔曼滤波三、简答题1. 请简要解释计算机视觉中的图像金字塔是什么,并说明其应用场景。
答案:图像金字塔是一种多尺度表示的方法,通过对原始图像进行多次模糊和下采样,得到一系列分辨率不同的图像。
它的应用场景包括图像缩放、图像融合、目标检测等。
图像金字塔可以在不同尺度下对图像进行处理,以适应不同场景的需求。
2. 请简要介绍计算机视觉中的物体识别技术,并指出其挑战和解决方案。
答案:物体识别是指在图像或视频中自动识别出特定物体的技术。
其挑战包括光照变化、视角变化、遮挡等因素的影响。
解决方案包括利用深度学习方法进行特征提取和分类,使用数据增强技术增加训练数据,以及采用多模态融合的方法提高识别准确率。
3. 请简要解释计算机视觉中的图像分割技术,并说明常用的分割方法。
H2O.ai 自动化机器学习蓝图:人类中心化、低风险的 AutoML 框架说明书
Beyond Reason CodesA Blueprint for Human-Centered,Low-Risk AutoML H2O.ai Machine Learning Interpretability TeamH2O.aiMarch21,2019ContentsBlueprintEDABenchmarkTrainingPost-Hoc AnalysisReviewDeploymentAppealIterateQuestionsBlueprintThis mid-level technical document provides a basic blueprint for combining the best of AutoML,regulation-compliant predictive modeling,and machine learning research in the sub-disciplines of fairness,interpretable models,post-hoc explanations,privacy and security to create a low-risk,human-centered machine learning framework.Look for compliance mode in Driverless AI soon.∗Guidance from leading researchers and practitioners.Blueprint†EDA and Data VisualizationKnow thy data.Automation implemented inDriverless AI as AutoViz.OSS:H2O-3AggregatorReferences:Visualizing Big DataOutliers through DistributedAggregation;The Grammar ofGraphicsEstablish BenchmarksEstablishing a benchmark from which to gauge improvements in accuracy,fairness, interpretability or privacy is crucial for good(“data”)science and for compliance.Manual,Private,Sparse or Straightforward Feature EngineeringAutomation implemented inDriverless AI as high-interpretabilitytransformers.OSS:Pandas Profiler,Feature ToolsReferences:Deep Feature Synthesis:Towards Automating Data ScienceEndeavors;Label,Segment,Featurize:A Cross Domain Framework forPrediction EngineeringPreprocessing for Fairness,Privacy or SecurityOSS:IBM AI360References:Data PreprocessingTechniques for Classification WithoutDiscrimination;Certifying andRemoving Disparate Impact;Optimized Pre-processing forDiscrimination Prevention;Privacy-Preserving Data MiningRoadmap items for H2O.ai MLI.Constrained,Fair,Interpretable,Private or Simple ModelsAutomation implemented inDriverless AI as GLM,RuleFit,Monotonic GBM.References:Locally InterpretableModels and Effects Based onSupervised Partitioning(LIME-SUP);Explainable Neural Networks Based onAdditive Index Models(XNN);Scalable Bayesian Rule Lists(SBRL)LIME-SUP,SBRL,XNN areroadmap items for H2O.ai MLI.Traditional Model Assessment and DiagnosticsResidual analysis,Q-Q plots,AUC andlift curves confirm model is accurateand meets assumption criteria.Implemented as model diagnostics inDriverless AI.Post-hoc ExplanationsLIME,Tree SHAP implemented inDriverless AI.OSS:lime,shapReferences:Why Should I Trust You?:Explaining the Predictions of AnyClassifier;A Unified Approach toInterpreting Model Predictions;PleaseStop Explaining Black Box Models forHigh Stakes Decisions(criticism)Tree SHAP is roadmap for H2O-3;Explanations for unstructured data areroadmap for H2O.ai MLI.Interlude:The Time–Tested Shapley Value1.In the beginning:A Value for N-Person Games,19532.Nobel-worthy contributions:The Shapley Value:Essays in Honor of Lloyd S.Shapley,19883.Shapley regression:Analysis of Regression in Game Theory Approach,20014.First reference in ML?Fair Attribution of Functional Contribution in Artificialand Biological Networks,20045.Into the ML research mainstream,i.e.JMLR:An Efficient Explanation ofIndividual Classifications Using Game Theory,20106.Into the real-world data mining workflow...finally:Consistent IndividualizedFeature Attribution for Tree Ensembles,20177.Unification:A Unified Approach to Interpreting Model Predictions,2017Model Debugging for Accuracy,Privacy or SecurityEliminating errors in model predictions bytesting:adversarial examples,explanation ofresiduals,random attacks and“what-if”analysis.OSS:cleverhans,pdpbox,what-if toolReferences:Modeltracker:RedesigningPerformance Analysis Tools for MachineLearning;A Marauder’s Map of Security andPrivacy in Machine Learning:An overview ofcurrent and future research directions formaking machine learning secure and privateAdversarial examples,explanation ofresiduals,measures of epistemic uncertainty,“what-if”analysis are roadmap items inH2O.ai MLI.Post-hoc Disparate Impact Assessment and RemediationDisparate impact analysis can beperformed manually using Driverless AIor H2O-3.OSS:aequitas,IBM AI360,themisReferences:Equality of Opportunity inSupervised Learning;Certifying andRemoving Disparate ImpactDisparate impact analysis andremediation are roadmap items forH2O.ai MLI.Human Review and DocumentationAutomation implemented as AutoDocin Driverless AI.Various fairness,interpretabilityand model debugging roadmapitems to be added to AutoDoc.Documentation of consideredalternative approaches typicallynecessary for compliance.Deployment,Management and MonitoringMonitor models for accuracy,disparateimpact,privacy violations or securityvulnerabilities in real-time;track modeland data lineage.OSS:mlflow,modeldb,awesome-machine-learning-opsmetalistReference:Model DB:A System forMachine Learning Model ManagementBroader roadmap item for H2O.ai.Human AppealVery important,may require custom implementation for each deployment environment?Iterate:Use Gained Knowledge to Improve Accuracy,Fairness, Interpretability,Privacy or SecurityImprovements,KPIs should not be restricted to accuracy alone.Open Conceptual QuestionsHow much automation is appropriate,100%?How to automate learning by iteration,reinforcement learning?How to implement human appeals,is it productizable?ReferencesThis presentation:https:///navdeep-G/gtc-2019/blob/master/main.pdfDriverless AI API Interpretability Technique Examples:https:///h2oai/driverlessai-tutorials/tree/master/interpretable_ml In-Depth Open Source Interpretability Technique Examples:https:///jphall663/interpretable_machine_learning_with_python https:///navdeep-G/interpretable-ml"Awesome"Machine Learning Interpretability Resource List:https:///jphall663/awesome-machine-learning-interpretabilityAgrawal,Rakesh and Ramakrishnan Srikant(2000).“Privacy-Preserving Data Mining.”In:ACM Sigmod Record.Vol.29.2.URL:/cs/projects/iis/hdb/Publications/papers/sigmod00_privacy.pdf.ACM,pp.439–450.Amershi,Saleema et al.(2015).“Modeltracker:Redesigning Performance Analysis Tools for Machine Learning.”In:Proceedings of the33rd Annual ACM Conference on Human Factors in Computing Systems.URL: https:///en-us/research/wp-content/uploads/2016/02/amershi.CHI2015.ModelTracker.pdf.ACM,pp.337–346.Calmon,Flavio et al.(2017).“Optimized Pre-processing for Discrimination Prevention.”In:Advances in Neural Information Processing Systems.URL:/paper/6988-optimized-pre-processing-for-discrimination-prevention.pdf,pp.3992–4001.Feldman,Michael et al.(2015).“Certifying and Removing Disparate Impact.”In:Proceedings of the21th ACM SIGKDD International Conference on Knowledge Discovery and Data Mining.URL:https:///pdf/1412.3756.pdf.ACM,pp.259–268.Hardt,Moritz,Eric Price,Nati Srebro,et al.(2016).“Equality of Opportunity in Supervised Learning.”In: Advances in neural information processing systems.URL:/paper/6374-equality-of-opportunity-in-supervised-learning.pdf,pp.3315–3323.Hu,Linwei et al.(2018).“Locally Interpretable Models and Effects Based on Supervised Partitioning (LIME-SUP).”In:arXiv preprint arXiv:1806.00663.URL:https:///ftp/arxiv/papers/1806/1806.00663.pdf.Kamiran,Faisal and Toon Calders(2012).“Data Preprocessing Techniques for Classification Without Discrimination.”In:Knowledge and Information Systems33.1.URL:https:///content/pdf/10.1007/s10115-011-0463-8.pdf,pp.1–33.Kanter,James Max,Owen Gillespie,and Kalyan Veeramachaneni(2016).“Label,Segment,Featurize:A Cross Domain Framework for Prediction Engineering.”In:Data Science and Advanced Analytics(DSAA),2016 IEEE International Conference on.URL:/static/papers/DSAA_LSF_2016.pdf.IEEE,pp.430–439.Kanter,James Max and Kalyan Veeramachaneni(2015).“Deep Feature Synthesis:Towards Automating Data Science Endeavors.”In:Data Science and Advanced Analytics(DSAA),2015.366782015.IEEEInternational Conference on.URL:https:///EVO-DesignOpt/groupWebSite/uploads/Site/DSAA_DSM_2015.pdf.IEEE,pp.1–10.Keinan,Alon et al.(2004).“Fair Attribution of Functional Contribution in Artificial and Biological Networks.”In:Neural Computation16.9.URL:https:///profile/Isaac_Meilijson/publication/2474580_Fair_Attribution_of_Functional_Contribution_in_Artificial_and_Biological_Networks/links/09e415146df8289373000000/Fair-Attribution-of-Functional-Contribution-in-Artificial-and-Biological-Networks.pdf,pp.1887–1915.Kononenko,Igor et al.(2010).“An Efficient Explanation of Individual Classifications Using Game Theory.”In: Journal of Machine Learning Research11.Jan.URL:/papers/volume11/strumbelj10a/strumbelj10a.pdf,pp.1–18.Lipovetsky,Stan and Michael Conklin(2001).“Analysis of Regression in Game Theory Approach.”In:Applied Stochastic Models in Business and Industry17.4,pp.319–330.Lundberg,Scott M.,Gabriel G.Erion,and Su-In Lee(2017).“Consistent Individualized Feature Attribution for Tree Ensembles.”In:Proceedings of the2017ICML Workshop on Human Interpretability in Machine Learning(WHI2017).Ed.by Been Kim et al.URL:https:///pdf?id=ByTKSo-m-.ICML WHI2017,pp.15–21.Lundberg,Scott M and Su-In Lee(2017).“A Unified Approach to Interpreting Model Predictions.”In: Advances in Neural Information Processing Systems30.Ed.by I.Guyon et al.URL:/paper/7062-a-unified-approach-to-interpreting-model-predictions.pdf.Curran Associates,Inc.,pp.4765–4774.Papernot,Nicolas(2018).“A Marauder’s Map of Security and Privacy in Machine Learning:An overview of current and future research directions for making machine learning secure and private.”In:Proceedings of the11th ACM Workshop on Artificial Intelligence and Security.URL:https:///pdf/1811.01134.pdf.ACM.Ribeiro,Marco Tulio,Sameer Singh,and Carlos Guestrin(2016).“Why Should I Trust You?:Explaining the Predictions of Any Classifier.”In:Proceedings of the22nd ACM SIGKDD International Conference on Knowledge Discovery and Data Mining.URL:/kdd2016/papers/files/rfp0573-ribeiroA.pdf.ACM,pp.1135–1144.Rudin,Cynthia(2018).“Please Stop Explaining Black Box Models for High Stakes Decisions.”In:arXiv preprint arXiv:1811.10154.URL:https:///pdf/1811.10154.pdf.Shapley,Lloyd S(1953).“A Value for N-Person Games.”In:Contributions to the Theory of Games2.28.URL: http://www.library.fa.ru/files/Roth2.pdf#page=39,pp.307–317.Shapley,Lloyd S,Alvin E Roth,et al.(1988).The Shapley Value:Essays in Honor of Lloyd S.Shapley.URL: http://www.library.fa.ru/files/Roth2.pdf.Cambridge University Press.Vartak,Manasi et al.(2016).“Model DB:A System for Machine Learning Model Management.”In: Proceedings of the Workshop on Human-In-the-Loop Data Analytics.URL:https:///~matei/papers/2016/hilda_modeldb.pdf.ACM,p.14.Vaughan,Joel et al.(2018).“Explainable Neural Networks Based on Additive Index Models.”In:arXiv preprint arXiv:1806.01933.URL:https:///pdf/1806.01933.pdf.Wilkinson,Leland(2006).The Grammar of Graphics.—(2018).“Visualizing Big Data Outliers through Distributed Aggregation.”In:IEEE Transactions on Visualization&Computer Graphics.URL:https:///~wilkinson/Publications/outliers.pdf.Yang,Hongyu,Cynthia Rudin,and Margo Seltzer(2017).“Scalable Bayesian Rule Lists.”In:Proceedings of the34th International Conference on Machine Learning(ICML).URL:https:///pdf/1602.08610.pdf.。
边缘检测中英文翻译
Digital Image Processing and Edge DetectionDigital Image ProcessingInterest in digital image processing methods stems from two principal application areas: improvement of pictorial information for human interpretation; and processing of image data for storage, transmission, and representation for autonomous machine perception.An image may be defined as a two-dimensional function, f(x,y), where x and y are spatial (plane) coordinates, and the amplitude of f at any pair of coordinates (x, y) is called the intensity or gray level of the image at that point. When x, y, and the amplitude values of f are all finite, discrete quantities, we call the image a digital image. The field of digital image processing refers to processing digital images by means of a digital computer. Note that a digital image is composed of a finite number of elements, each of which has a particular location and value. These elements are referred to as picture elements, image elements, pels, and pixels. Pixel is the term most widely used to denote the elements of a digital image.Vision is the most advanced of our senses, so it is not surprising that images play the single most important role in human perception. However, unlike humans, who are limited to the visual band of the electromagnetic (EM) spectrum, imaging machines cover almost the entire EM spectrum, ranging from gamma to radio waves. They can operate on images generated by sources that humans are not accustomed to associating with images. These include ultrasound, electron microscopy, and computer generated images. Thus, digital image processing encompasses a wide and varied field of applications.There is no general agreement among authors regarding where image processing stops and other related areas, such as image analysis and computer vision, start. Sometimes a distinction is made by defining image processing as a discipline in which both the input and output of a process are images. We believe this to be a limiting and somewhat artificial boundary. For example, under this definition,even the trivial task of computing the average intensity of an image (which yields a single number) would not be considered an image processing operation. On the other hand, there are fields such as computer vision whose ultimate goal is to use computers to emulate human vision, including learning and being able to make inferences and take actions based on visual inputs. This area itself is a branch of artificial intelligence(AI) whose objective is to emulate human intelligence. The field of AI is in its earliest stages of infancy in terms of development, with progress having been much slower than originally anticipated. The area of image analysis (also called image understanding) is in between image processing and computer vision.There are no clearcut boundaries in the continuum from image processing at one end to computer vision at the other. However, one useful paradigm is to consider three types of computerized processes in this continuum: low, mid, and highlevel processes. Low-level processes involve primitive operations such as image preprocessing to reduce noise, contrast enhancement, and image sharpening. A low-level process is characterized by the fact that both its inputs and outputs are images. Mid-level processing on images involves tasks such as segmentation (partitioning an image into regions or objects), description of those objects to reduce them to a form suitable for computer processing, and classification (recognition) of individual objects. A midlevel process is characterized by the fact that its inputs generally are images, but its outputs are attributes extracted from those images (e.g., edges, contours, and the identity of individual objects). Finally, higherlevel processing involves “making sense” of an ensemble of recognize d objects, as in image analysis, and, at the far end of the continuum, performing the cognitive functions normally associated with vision.Based on the preceding comments, we see that a logical place of overlap between image processing and image analysis is the area of recognition of individual regions or objects in an image. Thus, what we call in this book digital image processing encompasses processes whose inputs and outputs are images and, in addition, encompasses processes that extract attributes from images, up to and including the recognition of individual objects. As a simple illustration to clarify these concepts, consider the area of automated analysis of text. The processes of acquiring an image of the area containing the text, preprocessing that image, extracting (segmenting) the individual characters, describing the characters in a form suitable for computer processing, and recognizing those individual characters are in the scope of what we call digital image processing in this book. Making sense of the content of the page may be viewed as being in the domain of image analysis and even computer vision, depending on the level of complexity implied by the statement “making sense.” As will become evident shortly, digital image processing, as we have defined it, is used successfully in a broad range of areas of exceptional social and economic value.The areas of application of digital image processing are so varied that some formof organization is desirable in attempting to capture the breadth of this field. One of the simplest ways to develop a basic understanding of the extent of image processing applications is to categorize images according to their source (e.g., visual, X-ray, and so on). The principal energy source for images in use today is the electromagnetic energy spectrum. Other important sources of energy include acoustic, ultrasonic, and electronic (in the form of electron beams used in electron microscopy). Synthetic images, used for modeling and visualization, are generated by computer. In this section we discuss briefly how images are generated in these various categories and the areas in which they are applied.Images based on radiation from the EM spectrum are the most familiar, especially images in the X-ray and visual bands of the spectrum. Electromagnetic waves can be conceptualized as propagating sinusoidal waves of varying wavelengths, or they can be thought of as a stream of massless particles, each traveling in a wavelike pattern and moving at the speed of light. Each massless particle contains a certain amount (or bundle) of energy. Each bundle of energy is called a photon. If spectral bands are grouped according to energy per photon, we obtain the spectrum shown in fig. below, ranging from gamma rays (highest energy) at one end to radio waves (lowest energy) at the other. The bands are shown shaded to convey the fact that bands of the EM spectrum are not distinct but rather transition smoothly from one to the other.Fig1Image acquisition is the first process. Note that acquisition could be as simple as being given an image that is already in digital form. Generally, the image acquisition stage involves preprocessing, such as scaling.Image enhancement is among the simplest and most appealing areas of digital image processing. Basically, the idea behind enhancement techniques is to bring out detail that is obscured, or simply to highlight certain features of interest in an image.A familiar example of enhancement is when we increase the contrast of an imagebecause “it looks better.” It is important to keep in mind that enhancement is a very subjective area of image processing. Image restoration is an area that also deals with improving the appearance of an image. However, unlike enhancement, which is subjective, image restoration is objective, in the sense that restoration techniques tend to be based on mathematical or probabilistic models of image degradation. Enhancement, on the other hand, is based on human subjective preferences regarding what constitutes a “good” en hancement result.Color image processing is an area that has been gaining in importance because of the significant increase in the use of digital images over the Internet. It covers a number of fundamental concepts in color models and basic color processing in a digital domain. Color is used also in later chapters as the basis for extracting features of interest in an image.Wavelets are the foundation for representing images in various degrees of resolution. In particular, this material is used in this book for image data compression and for pyramidal representation, in which images are subdivided successively into smaller regions.F ig2Compression, as the name implies, deals with techniques for reducing the storage required to save an image, or the bandwidth required to transmi it.Although storagetechnology has improved significantly over the past decade, the same cannot be said for transmission capacity. This is true particularly in uses of the Internet, which are characterized by significant pictorial content. Image compression is familiar (perhaps inadvertently) to most users of computers in the form of image file extensions, such as the jpg file extension used in the JPEG (Joint Photographic Experts Group) image compression standard.Morphological processing deals with tools for extracting image components that are useful in the representation and description of shape. The material in this chapter begins a transition from processes that output images to processes that output image attributes.Segmentation procedures partition an image into its constituent parts or objects. In general, autonomous segmentation is one of the most difficult tasks in digital image processing. A rugged segmentation procedure brings the process a long way toward successful solution of imaging problems that require objects to be identified individually. On the other hand, weak or erratic segmentation algorithms almost always guarantee eventual failure. In general, the more accurate the segmentation, the more likely recognition is to succeed.Representation and description almost always follow the output of a segmentation stage, which usually is raw pixel data, constituting either the boundary of a region (i.e., the set of pixels separating one image region from another) or all the points in the region itself. In either case, converting the data to a form suitable for computer processing is necessary. The first decision that must be made is whether the data should be represented as a boundary or as a complete region. Boundary representation is appropriate when the focus is on external shape characteristics, such as corners and inflections. Regional representation is appropriate when the focus is on internal properties, such as texture or skeletal shape. In some applications, these representations complement each other. Choosing a representation is only part of the solution for transforming raw data into a form suitable for subsequent computer processing. A method must also be specified for describing the data so that features of interest are highlighted. Description, also called feature selection, deals with extracting attributes that result in some quantitative information of interest or are basic for differentiating one class of objects from another.Recognition is the pro cess that assigns a label (e.g., “vehicle”) to an object based on its descriptors. As detailed before, we conclude our coverage of digital imageprocessing with the development of methods for recognition of individual objects.So far we have said nothing about the need for prior knowledge or about the interaction between the knowledge base and the processing modules in Fig2 above. Knowledge about a problem domain is coded into an image processing system in the form of a knowledge database. This knowledge may be as simple as detailing regions of an image where the information of interest is known to be located, thus limiting the search that has to be conducted in seeking that information. The knowledge base also can be quite complex, such as an interrelated list of all major possible defects in a materials inspection problem or an image database containing high-resolution satellite images of a region in connection with change-detection applications. In addition to guiding the operation of each processing module, the knowledge base also controls the interaction between modules. This distinction is made in Fig2 above by the use of double-headed arrows between the processing modules and the knowledge base, as opposed to single-headed arrows linking the processing modules.Edge detectionEdge detection is a terminology in image processing and computer vision, particularly in the areas of feature detection and feature extraction, to refer to algorithms which aim at identifying points in a digital image at which the image brightness changes sharply or more formally has discontinuities.Although point and line detection certainly are important in any discussion on segmentation,edge dectection is by far the most common approach for detecting meaningful discounties in gray level.Although certain literature has considered the detection of ideal step edges, the edges obtained from natural images are usually not at all ideal step edges. Instead they are normally affected by one or several of the following effects:1.focal b lur caused by a finite depth-of-field and finite point spread function; 2.penumbral blur caused by shadows created by light sources of non-zero radius; 3.shading at a smooth object edge; 4.local specularities or interreflections in the vicinity of object edges.A typical edge might for instance be the border between a block of red color and a block of yellow. In contrast a line (as can be extracted by a ridge detector) can be a small number of pixels of a different color on an otherwise unchanging background. For a line, there may therefore usually be one edge on each side of the line.To illustrate why edge detection is not a trivial task, let us consider the problemof detecting edges in the following one-dimensional signal. Here, we may intuitively say that there should be an edge between the 4th and 5th pixels.If the intensity difference were smaller between the 4th and the 5th pixels and if the intensity differences between the adjacent neighbouring pixels were higher, it would not be as easy to say that there should be an edge in the corresponding region. Moreover, one could argue that this case is one in which there are several edges.Hence, to firmly state a specific threshold on how large the intensity change between two neighbouring pixels must be for us to say that there should be an edge between these pixels is not always a simple problem. Indeed, this is one of the reasons why edge detection may be a non-trivial problem unless the objects in the scene are particularly simple and the illumination conditions can be well controlled.There are many methods for edge detection, but most of them can be grouped into two categories,search-based and zero-crossing based. The search-based methods detect edges by first computing a measure of edge strength, usually a first-order derivative expression such as the gradient magnitude, and then searching for local directional maxima of the gradient magnitude using a computed estimate of the local orientation of the edge, usually the gradient direction. The zero-crossing based methods search for zero crossings in a second-order derivative expression computed from the image in order to find edges, usually the zero-crossings of the Laplacian or the zero-crossings of a non-linear differential expression, as will be described in the section on differential edge detection following below. As a pre-processing step to edge detection, a smoothing stage, typically Gaussian smoothing, is almost always applied (see also noise reduction).The edge detection methods that have been published mainly differ in the types of smoothing filters that are applied and the way the measures of edge strength are computed. As many edge detection methods rely on the computation of image gradients, they also differ in the types of filters used for computing gradient estimates in the x- and y-directions.Once we have computed a measure of edge strength (typically the gradient magnitude), the next stage is to apply a threshold, to decide whether edges are present or not at an image point. The lower the threshold, the more edges will be detected, and the result will be increasingly susceptible to noise, and also to picking outirrelevant features from the image. Conversely a high threshold may miss subtle edges, or result in fragmented edges.If the edge thresholding is applied to just the gradient magnitude image, the resulting edges will in general be thick and some type of edge thinning post-processing is necessary. For edges detected with non-maximum suppression however, the edge curves are thin by definition and the edge pixels can be linked into edge polygon by an edge linking (edge tracking) procedure. On a discrete grid, the non-maximum suppression stage can be implemented by estimating the gradient direction using first-order derivatives, then rounding off the gradient direction to multiples of 45 degrees, and finally comparing the values of the gradient magnitude in the estimated gradient direction.A commonly used approach to handle the problem of appropriate thresholds for thresholding is by using thresholding with hysteresis. This method uses multiple thresholds to find edges. We begin by using the upper threshold to find the start of an edge. Once we have a start point, we then trace the path of the edge through the image pixel by pixel, marking an edge whenever we are above the lower threshold. We stop marking our edge only when the value falls below our lower threshold. This approach makes the assumption that edges are likely to be in continuous curves, and allows us to follow a faint section of an edge we have previously seen, without meaning that every noisy pixel in the image is marked down as an edge. Still, however, we have the problem of choosing appropriate thresholding parameters, and suitable thresholding values may vary over the image.Some edge-detection operators are instead based upon second-order derivatives of the intensity. This essentially captures the rate of change in the intensity gradient. Thus, in the ideal continuous case, detection of zero-crossings in the second derivative captures local maxima in the gradient.We can come to a conclusion that,to be classified as a meaningful edge point,the transition in gray level associated with that point has to be significantly stronger than the background at that point.Since we are dealing with local computations,the method of choice to determine whether a value is “significant” or not id to use a threshold.Thus we define a point in an image as being as being an edge point if its two-dimensional first-order derivative is greater than a specified criterion of connectedness is by definition an edge.The term edge segment generally is used if the edge is short in relation to the dimensions of the image.A key problem insegmentation is to assemble edge segments into longer edges.An alternate definition if we elect to use the second-derivative is simply to define the edge ponits in an image as the zero crossings of its second derivative.The definition of an edge in this case is the same as above.It is important to note that these definitions do not guarantee success in finding edge in an image.They simply give us a formalism to look for them.First-order derivatives in an image are computed using the gradient.Second-order derivatives are obtained using the Laplacian.数字图像处理与边缘检测数字图像处理数字图像处理方法的研究源于两个主要应用领域:其一是改进图像信息以便于人们分析;其二是为使机器自动理解而对图像数据进行存储、传输及显示。
goodfeaturestotrack 详解 -回复

goodfeaturestotrack 详解-回复好的,我将为您撰写一篇关于goodfeaturestotrack的详解文章。
goodfeaturestotrack是计算机视觉中的一个重要概念,用于在图像中提取出具有代表性的特征点。
在本文中,我将一步一步回答关于goodfeaturestotrack的相关问题,并为您介绍其原理和算法。
文章长度目标为1500-2000字。
标题:GoodFeaturesToTrack详解:图像特征点提取的关键导言:计算机视觉是计算机科学的一个分支,它致力于使用计算机和数字图像处理技术解决与人类视觉相关的问题。
在计算机视觉任务中,特征提取是一个至关重要的步骤。
特征点是图像中具有代表性的部分,这些部分在不同的图像中具有较好的区分度和稳定性。
GoodFeaturesToTrack(或GFTT)是一种经典的特征点提取算法。
接下来我们将详细介绍GFTT的原理和相关实现细节。
1. GoodFeaturesToTrack的原理GoodFeaturesToTrack算法的目标是在图像中自动找到具有良好区分度和稳定性的特征点。
该算法是基于角点的检测,角点是图像边缘发生明显变化的点。
GFTT算法通过计算图像每个像素点的角点响应函数来选取特征点。
角点响应函数是一个表示角点边缘变化量的值,较大的值代表着更具代表性的特征。
2. GFTT算法的步骤GoodFeaturesToTrack算法的具体步骤如下:a. 首先对图像进行预处理,例如灰度化、降噪等操作,以便之后的计算。
b. 计算图像中每个像素点的梯度值,通常使用Sobel算子或其他梯度算子来计算图像的梯度。
c. 对图像中的每个像素点计算角点响应函数,常用的方法是使用Harris 角点检测算法。
d. 选择具有最高角点响应函数值的像素点作为特征点,并根据一定的阈值来过滤掉响应函数值较低的像素点。
e. 如果检测到的特征点数量超过了事先设定的最大值,则只选择具有最高响应函数值的特征点。
中英文指称的对比分析

中文摘要衔接是篇章中的句子在语义和表层结构中的连接方式,是构筑篇章的重要手段之一。
本文以韩礼德的功能主义语言学理论为基础,辅以大量英汉对比例句,分析了作为衔接方式之一的指称在英汉两种语言系统中的异同。
指称衔接关系又可进一步分为人称指称关系、指示指称关系和对比指称关系。
通过对比分析,我们发现英语和汉语的人称指称系统在指称功能上并无多大差异,其区别主要体现在英汉人称代词在表达和形态上的差异,而导致这种差别的主要原因正是英语重形和而汉语重意和。
相对而言,汉语语篇中的指示指称较之英语复杂,本文重点比较了两种语言在表示近指和远指概念时选词的区别,体现了英语重客观逻辑而汉语多受主观因素影响的特点。
总的来说,英汉两种语言的比较指称系统并无多大差异,主要都是通过形容词和副词来表达比较意义的。
人称指称的对比分析对于翻译实践,尤其是对增词等具体翻译技巧的应用有很好的借鉴和指导作用。
在外语教学实践中,衔接理论是传统教学的有效补充,指示指称的某些词项的功能可以解释语法规则望尘莫及的一些语言现象。
外语教学者可以从中受启发,博采众长,把语言学领域的新研究成果和理论用于指导教学。
关键词:指称;衔接;语篇;话语;功能AbstractOneofthechieftasksoftextualanalysisistoidentifythelinguisticfeaturesthatcausethesentencesequencetocohere.ThetiesthatbindatexttogetherareoftenreferredtoundertheheadingofcohesionReferenceiSoneofthefourwaystorealizecohesioninatext.TheauthorofthispapercomparesandanalyzesthetextualreferenceinChineseandEnglish,pointsouttheirdifferenceandcornnrlonnesswithsomecontrastiveexamplesandtriestodiscoverhowanEnglishoraChinesetextishierarchicallyorganizedaswellashowitisputtogetherKeywords:reference;cohesion;text;discourse;functionAcknowledgementsGratitudeisduetomysupervisor,ProfessorDengMingde,whoreadmydraftwithgreatpatienceandgavememuchinvaluableadviceforimprovements.Hespurredmeonwhile1wasatalossastowhereandhowfarIshouldcontinue.IowethecompletionofthisthesislargelytoProfessorDeng’Sinstructionandhelp.IanlalsoindebtedtomycolleagueJiangXueting,whosesuggestioninspiredmetomakeacontrastiveanalysisofthereferencesystemofEnglishandChinese.Inaddition,1wouldliketoextendmythankstoMichelleTang,whoencouragedmethroughoutthispainstakingprocessofproducingthethesisOnReferenceinEnglishandChinese:AContrastiveStudyIntroduction_——WeareplanningatripthisJuly.Areyougoing?一Whois“wc'’?——Mycolleaguesandme,ofcourse,一Thenwhydidn’tyousay“Theyareplanningatrip.Arewegoing?’’一Idon’tgetatit.What’sthedifference?一YouandIaresupposedtobeawhole‘‘We”shouldrefertoyouandmeSohowcallyouexcludeme,yourfiancee?!一Ok,it’smyfault.Oh,wait,wait.It’sourfault.Thisdialoguewasbetweenmyfianc6andmeatthedinnertableseveralmonthsago.IcannotexplainwhyIflewintosuchapassionoffurythen.Anyway,itseemednobigdeal.Howcarlwords,suchas‘Ⅶey”,“we”and“you”makethedifference?Unfortunately,thefactis,theydo.Atleasthischoosingtosay“we”and“you”insteadof“they'’and‘Ⅵe,’widenedthepsychologicaldistancebetweenus,whichirritatedmealot.Itstruckmethatsomethingaboutpronounscarlbeafeasibletopicofmythesis.Thepotentialforcohesionliesinthesystematicresourcesofreference(includingpronouns,ofcourse),ellipsisandsoonthatarebuiltintothelanguageitselfHallidayclaimsthatcohesionisrealizedbythefollowingfourresources,namely,reference,ellipsis,conjunctionandlexicalcohesion.Theidentificationofsomeoptionalformswithintheseresourcescallsforustolookelsewhere,eitherinthetextprecedingorfollowingitoroutintotheworld,thus,acohesivetieisestablished.ThecohesionliesintherelationthatisbuiltbetweenthereferencejtemandthereferentBasedonHalliday’sfunctionallinguisticsandsupplementedbyQ!墅垒堡里里g!!些竺垒曼!!!竺!垒曼!望:!!!!堂adequateexamplesbothofEnglishandChinese,thisthesismakesacontrastivestudyofthereferencesystembetweenthesetwolanguages.Section1summarizesdifferentapproachestothestudyofreference.ThisthesisadoptsthefunctionalapproachproposedbyHallidayandHasan.Itconcernsthedistinctionbetweentwopairsofcloselylinkedterms,i.e.,text/discourseandcohesion/coherence.SincethereexistdifferencesinthedefinitionoftextZdiscourseamonglinguists,aworkingdefinitionoftextisattemptedhere,Itisasemanticallyunifiedmeaningfulwhole,whichhasacertaincommunicativegoal.Inseparablefromtheconceptoftextarecohesionandcoherence.Partsofatextareorganizedandrelatedtoothersinordertoformameaningfulwhole.Cohesionisasemanticconceptreferringtotherelationofmeaningwithinthetext.Itisanabsoluteconceptofobjectivitywhilecoherenceissubjectiveandofrelmivenature.Itisamentalphenomenonandcannotbeidentifiedandquantifiedinthesamewayascohesion.Cohesionisacruciallinguisticdeviceintheexpressionofcoherentmeanings.Havingmadeclearthetheoreticalbackground,theauthorbrieflyIntroducesthreereferencedirections.Endophoraoperateswithinthetext,whichcanbefurtherdividedintoanaphora(backwardreference)andcataphora(forwardreference)whileexophorarelatestotheoutsideworld.Referenceisfurtheridentifiedaspersonalreference,demonstrativereferenceandcomparativereferenceaccordingtothepartsofspeechoftheveryreferenceitem.+Inthenextsection,adetmledcomparativestudyismadebetweentheandChinese.TheresultsshowthattherepersonalreferenceofEnglishexistslittledifferenceinthereferentialfunctionbetweenthetwolanguages.ThedivergencyliesinthefactthatasthereareinflectionsandcasesinEnglish,Englishspeakersregularlyrelyonthelexicalmethodtoexpressreference.Chinesespeakers,conversely,tendtousesyntacticdevicetoproducecohesiveeffects.Generallyspeaking。
计算机视觉试题及答案精选全文完整版

可编辑修改精选全文完整版计算机视觉试题及答案第一部分:选择题1. 在计算机视觉中,图像处理主要通过哪些操作来提取有用的图像特征?a) 噪声抑制b) 边缘检测c) 特征提取d) 图像拼接答案:c2. 在计算机视觉中,常用的图像拼接算法是什么?a) 最近邻插值b) 双线性插值c) 双三次插值d) 原始图像拼接答案:b3. 在目标检测中,常用的算法是什么?a) Haar特征级联分类器b) SIFT算法c) SURF算法d) HOG特征描述子答案:a4. 在图像分割中,哪种算法可以将图像分割成不同的区域?a) K均值聚类算法b) Canny边缘检测算法c) 霍夫变换d) 卷积神经网络答案:a5. 在计算机视觉中,图像识别是通过什么来实现的?a) 特征匹配b) 图像分割c) 图像去噪d) 图像增强答案:a第二部分:填空题1. 图像的分辨率是指图像中的______。
答案:像素数量(或像素个数)2. 图像的直方图能够表示图像中不同______的分布情况。
答案:像素值(或亮度值)3. 图像处理中常用的边缘检测算子有______。
答案:Sobel、Prewitt、Laplacian等(可以列举多个)4. 在计算机视觉中,SURF算法中的SURF是什么的缩写?答案:加速稳健特征(Speeded-Up Robust Features)5. 在图像分割中,常用的阈值选择算法有______。
答案:Otsu、基于聚类的阈值选择等(可以列举多个)第三部分:问答题1. 请简述计算机视觉的定义及其应用领域。
答:计算机视觉是利用计算机对图像和视频进行理解和解释的研究领域。
它主要包括图像处理、图像分析、目标检测与跟踪、图像识别等技术。
应用领域包括机器人视觉、自动驾驶、安防监控、医学影像处理等。
2. 请简要描述图像处理中常用的滤波器有哪些,并说明其作用。
答:图像处理中常用的滤波器包括均值滤波器、中值滤波器、高斯滤波器等。
均值滤波器用于去除图像中的噪声,通过取邻域像素的平均值来减少噪声的影响;中值滤波器通过取邻域像素的中值来去除图像中的椒盐噪声;高斯滤波器通过对邻域像素进行加权平均来模糊图像,并且能够有效抑制高频噪声。
A Label Field Fusion Bayesian Model and Its Penalized Maximum Rand Estimator for Image Segmentation

1610IEEE TRANSACTIONS ON IMAGE PROCESSING, VOL. 19, NO. 6, JUNE 2010A Label Field Fusion Bayesian Model and Its Penalized Maximum Rand Estimator for Image SegmentationMax MignotteAbstract—This paper presents a novel segmentation approach based on a Markov random field (MRF) fusion model which aims at combining several segmentation results associated with simpler clustering models in order to achieve a more reliable and accurate segmentation result. The proposed fusion model is derived from the recently introduced probabilistic Rand measure for comparing one segmentation result to one or more manual segmentations of the same image. This non-parametric measure allows us to easily derive an appealing fusion model of label fields, easily expressed as a Gibbs distribution, or as a nonstationary MRF model defined on a complete graph. Concretely, this Gibbs energy model encodes the set of binary constraints, in terms of pairs of pixel labels, provided by each segmentation results to be fused. Combined with a prior distribution, this energy-based Gibbs model also allows for definition of an interesting penalized maximum probabilistic rand estimator with which the fusion of simple, quickly estimated, segmentation results appears as an interesting alternative to complex segmentation models existing in the literature. This fusion framework has been successfully applied on the Berkeley image database. The experiments reported in this paper demonstrate that the proposed method is efficient in terms of visual evaluation and quantitative performance measures and performs well compared to the best existing state-of-the-art segmentation methods recently proposed in the literature. Index Terms—Bayesian model, Berkeley image database, color textured image segmentation, energy-based model, label field fusion, Markovian (MRF) model, probabilistic Rand index.I. INTRODUCTIONIMAGE segmentation is a frequent preprocessing step which consists of achieving a compact region-based description of the image scene by decomposing it into spatially coherent regions with similar attributes. This low-level vision task is often the preliminary and also crucial step for many image understanding algorithms and computer vision applications. A number of methods have been proposed and studied in the last decades to solve the difficult problem of textured image segmentation. Among them, we can cite clustering algorithmsManuscript received February 20, 2009; revised February 06, 2010. First published March 11, 2010; current version published May 14, 2010. This work was supported by a NSERC individual research grant. The associate editor coordinating the review of this manuscript and approving it for publication was Prof. Peter C. Doerschuk. The author is with the Département d’Informatique et de Recherche Opérationnelle (DIRO), Université de Montréal, Faculté des Arts et des Sciences, Montréal H3C 3J7 QC, Canada (e-mail: mignotte@iro.umontreal.ca). Color versions of one or more of the figures in this paper are available online at . Digital Object Identifier 10.1109/TIP.2010.2044965[1], spatial-based segmentation methods which exploit the connectivity information between neighboring pixels and have led to Markov Random Field (MRF)-based statistical models [2], mean-shift-based techniques [3], [4], graph-based [5], [6], variational methods [7], [8], or by region-based split and merge procedures, sometimes directly expressed by a global energy function to be optimized [9]. Years of research in segmentation have demonstrated that significant improvements on the final segmentation results may be achieved either by using notably more sophisticated feature selection procedures, or more elaborate clustering techniques (sometimes involving a mixture of different or non-Gaussian distributions for the multidimensional texture features [10], [11]) or by taking into account prior distribution on the labels, region process, or the number of classes [9], [12], [13]. In all cases, these improvements lead to computationally expensive segmentation algorithms and, in the case of energy-based segmentation models, to costly optimization techniques. The segmentation approach, proposed in this paper, is conceptually different and explores another strategy initially introduced in [14]. Instead of considering an elaborate and better designed segmentation model of textured natural image, our technique explores the possible alternative of fusing (i.e., efficiently combining) several quickly estimated segmentation maps associated with simpler segmentation models for a final reliable and accurate segmentation result. These initial segmentations to be fused can be given either by different algorithms or by the same algorithm with different values of the internal parameters such as several -means clustering results with different values of , or by several -means results using different distance metrics, and applied on an input image possibly expressed in different color spaces or by other means. The fusion model, presented in this paper, is derived from the recently introduced probabilistic rand index (PRI) [15], [16] which measures the agreement of one segmentation result to multiple (manually generated) ground-truth segmentations. This measure efficiently takes into account the inherent variation existing across hand-labeled possible segmentations. We will show that this non-parametric measure allows us to derive an appealing fusion model of label fields, easily expressed as a Gibbs distribution, or as a nonstationary MRF model defined on a complete graph. Finally, this fusion model emerges as a classical optimization problem in which the Gibbs energy function related to this model has to be minimized. In other words, or analytically expressed in the regularization framework, each quickly estimated segmentation (to be fused) provides a set of constraints in terms of pairs of pixel labels (i.e., binary cliques) that should be equal or not. Finally, our fusion result is found1057-7149/$26.00 © 2010 IEEEMIGNOTTE: LABEL FIELD FUSION BAYESIAN MODEL AND ITS PENALIZED MAXIMUM RAND ESTIMATOR FOR IMAGE SEGMENTATION1611by searching for a segmentation map that minimizes an energy function encoding this precomputed set of binary constraints (thus optimizing the so-called PRI criterion). In our application, this final optimization task is performed by a robust multiresolution coarse-to-fine minimization strategy. This fusion of simple, quickly estimated segmentation results appears as an interesting alternative to complex, computationally demanding segmentation models existing in the literature. This new strategy of segmentation is validated in the Berkeley natural image database (also containing, for quantitative evaluations, ground truth segmentations obtained from human subjects). Conceptually, our fusion strategy is in the framework of the so-called decision fusion approaches recently proposed in clustering or imagery [17]–[21]. With these methods, a series of energy functions are first minimized before their outputs (i.e., their decisions) are merged. Following this strategy, Fred et al. [17] have explored the idea of evidence accumulation for combining the results of multiple clusterings. Reed et al. have proposed a Gibbs energy-based fusion model that differs from ours in the likelihood and prior energy design, as final merging procedure (for the fusion of large scale classified sonar image [21]). More precisely, Reed et al. employed a voting scheme-based likelihood regularized by an isotropic Markov random field priorly used to inpaint regions where the likelihood decision is not available. More generally, the concept of combining classifiers for the improvement of the performance of individual classifiers is known, in machine learning field, as a committee machine or mixture of experts [22], [23]. In this context, Dietterich [23] have provided an accessible and informal reasoning, from statistical, computational and representational viewpoints, of why ensembles can improve results. In this recent field of research, two major categories of committee machines are generally found in the literature. Our fusion decision approach is in the category of the committee machine model that utilizes an ensemble of classifiers with a static structure type. In this class of committee machines, the responses of several classifiers are combined by means of a mechanism that does not involve the input data (contrary to the dynamic structure type-based mixture of experts). In order to create an efficient ensemble of classifiers, three major categories of methods have been suggested whose goal is to promote diversity in order to increase efficiency of the final classification result. This can be done either by using different subsets of the input data, either by using a great diversity of the behavior between classifiers on the input data or finally by using the diversity of the behavior of the input data. Conceptually, our ensemble of classifiers is in this third category, since we intend to express the input data in different color spaces, thus encouraging diversity and different properties such as data decorrelation, decoupling effects, perceptually uniform metrics, compaction and invariance to various features, etc. In this framework, the combination itself can be performed according to several strategies or criteria (e.g., weighted majority vote, probability rules: sum, product, mean, median, classifier as combiner, etc.) but, none (to our knowledge) uses the PRI fusion (PRIF) criterion. Our segmentation strategy, based on the fusion of quickly estimated segmentation maps, is similar to the one proposed in [14] but the criterion which is now used in this new fusion model is different. In [14], the fusion strategy can be viewed as a two-stephierarchical segmentation procedure in which the first step remains identical and a set of initial input texton segmentation maps (in each color space) is estimated. Second, a final clustering, taking into account this mixture of textons (expressed in the set of different color space) is then used as a discriminant feature descriptor for a final -mean clustering whose output is the final fused segmentation map. Contrary to the fusion model presented in this paper, this second step (fusion of texton segmentation maps) is thus achieved in the intra-class inertia sense which is also the so-called squared-error criterion of the -mean algorithm. Let us add that a conceptually different label field fusion model has been also recently introduced in [24] with the goal of blending a spatial segmentation (region map) and a quickly estimated and to-be-refined application field (e.g., motion estimation/segmentation field, occlusion map, etc.). The goal of the fusion procedure explained in [24] is to locally fuse label fields involving labels of two different natures at different level of abstraction (i.e., pixel-wise and region-wise). More precisely, its goal is to iteratively modify the application field to make its regions fit the color regions of the spatial segmentation with the assumption that the color segmentation is more detailed than the regions of the application field. In this way, misclassified pixels in the application field (false positives and false negatives) are filtered out and blobby shapes are sharpened, resulting in a more accurate final application label field. The remainder of this paper is organized as follows. Section II describes the proposed Bayesian fusion model. Section III describes the optimization strategy used to minimize the Gibbs energy field related to this model and Section IV describes the segmentation model whose outputs will be fused by our model. Finally, Section V presents a set of experimental results and comparisons with existing segmentation techniques.II. PROPOSED FUSION MODEL A. Rand Index The Rand index [25] is a clustering quality metric that measures the agreement of the clustering result with a given ground truth. This non-parametric statistical measure was recently used in image segmentation [16] as a quantitative and perceptually interesting measure to compare automatic segmentation of an image to a ground truth segmentation (e.g., a manually hand-segmented image given by an expert) and/or to objectively evaluate the efficiency of several unsupervised segmentation methods. be the number of pixels assigned to the same region Let (i.e., matched pairs) in both the segmentation to be evaluated and the ground truth segmentation , and be the number of pairs of pixels assigned to different regions (i.e., misand . The Rand index is defined as matched pairs) in to the total number of pixel pairs, i.e., the ratio of for an image of size pixels. More formally [16], and designate the set of region labels respecif tively associated to the segmentation maps and at pixel location and where is an indicator function, the Rand index1612IEEE TRANSACTIONS ON IMAGE PROCESSING, VOL. 19, NO. 6, JUNE 2010is given by the following relation:given by the empirical proportion (3) where is the delta Kronecker function. In this way, the PRI measure is simply the mean of the Rand index computed between each [16]. As a consequence, the PRI pair measure will favor (i.e., give a high score to) a resulting acceptable segmentation map which is consistent with most of the segmentation results given by human experts. More precisely, the resulting segmentation could result in a compromise or a consensus, in terms of level of details and contour accuracy exhibited by each ground-truth segmentations. Fig. 8 gives a fusion map example, using a set of manually generated segmentations exhibiting a high variation, in terms of level of details. Let us add that this probabilistic metric is not degenerate; all the bad segmentations will give a low score without exception [16]. C. Generative Gibbs Distribution Model of Correct Segmentations (i.e., the pairwise empirical As indicated in [15], the set ) defines probabilities for each pixel pair computed over an appealing generative model of correct segmentation for the image, easily expressed as a Gibbs distribution. In this way, the Gibbs distribution, generative model of correct segmentation, which can also be considered as a likelihood of , in the PRI sense, may be expressed as(1) which simply computes the proportion (value ranging from 0 to 1) of pairs of pixels with compatible region label relationships between the two segmentations to be compared. A value of 1 indicates that the two segmentations are identical and a value of 0 indicates that the two segmentations do not agree on any pair of points (e.g., when all the pixels are gathered in a single region in one segmentation whereas the other segmentation assigns each pixel to an individual region). When the number of and are much smaller than the number of data labels in points , a computationally inexpensive estimator of the Rand index can be found in [16]. B. Probabilistic Rand Index (PRI) The PRI was recently introduced by Unnikrishnan [16] to take into accounttheinherentvariabilityofpossible interpretationsbetween human observers of an image, i.e., the multiple acceptable ground truth segmentations associated with each natural image. This variability between observers, recently highlighted by the Berkeley segmentation dataset [26] is due to the fact that each human chooses to segment an image at different levels of detail. This variability is also due image segmentation being an ill-posed problem, which exhibits multiple solutions for the different possible values of the number of classes not known a priori. Hence, in the absence of a unique ground-truth segmentation, the clustering quality measure has to quantify the agreement of an automatic segmentation (i.e., given by an algorithm) with the variation in a set of available manual segmentations representing, in fact, a very small sample of the set of all possible perceptually consistent interpretations of an image [15]. The authors [16] address this concern by soft nonuniform weighting of pixel pairs as a means of accounting for this variability in the ground truth set. More formally, let us consider a set of manually segmented (ground truth) images corresponding to an be the segmentation to be compared image of size . Let with the manually labeled set and designates the set of reat pixel gion labels associated with the segmentation maps location , the probabilistic RI is defined bywhere is the set of second order cliques or binary cliques of a Markov random field (MRF) model defined on a complete graph (each node or pixel is connected to all other pixels of is the temperature factor of the image) and this Boltzmann–Gibbs distribution which is twice less than the normalization factor of the Rand Index in (1) or (2) since there than pairs of pixels for which are twice more binary cliques . is the constant partition function. After simplification, this yields(2) where a good choice for the estimator of (the probability of the pixel and having the same label across ) is simply (4)MIGNOTTE: LABEL FIELD FUSION BAYESIAN MODEL AND ITS PENALIZED MAXIMUM RAND ESTIMATOR FOR IMAGE SEGMENTATION1613where is a constant partition function (with a factor which depends only on the data), namelywhere is the set of all possible (configurations for the) segof size pixels. Let us add mentations into regions that, since the number of classes (and thus the number of regions) of this final segmentation is not a priori known, there are possibly, between one and as much as regions that the number of pixels in this image (assigning each pixel to an individual can region is a possible configuration). In this setting, be viewed as the potential of spatially variant binary cliques (or pairwise interaction potentials) of an equivalent nonstationary MRF generative model of correct segmentations in the case is assumed to be a set of representative ground where truth segmentations. Besides, , the segmentation result (to be ), can be considered as a realization of this compared to generative model with PRand, a statistical measure proportional to its negative likelihood energy. In other words, an estimate of , in the maximum likelihood sense of this generative model, will give a resulting segmented map (i.e., a fusion result) with a to be fused. high fidelity to the set of segmentations D. Label Field Fusion Model for Image Segmentation Let us consider that we have at our disposal, a set of segmentations associated to an image of size to be fused (i.e., to efficiently combine) in order to obtain a final reliable and accurate segmentation result. The generative Gibbs distribution model of correct segmentations expressed in (4) gives us an interesting fusion model of segmentation maps, in the maximum PRI sense, or equivalently in the maximum likelihood (ML) sense for the underlying Gibbs model expressed in (4). In this framework, the set of is computed with the empirical proportion estimator [see (3)] on the data . Once has been estimated, the resulting ML fusion segmentation map is thus defined by maximizing the likelihood distributiontions for different possible values of the number of classes which is not a priori known. To render this problem well-posed with a unique solution, some constraints on the segmentation process are necessary, favoring over segmentation or, on the contrary, merging regions. From the probabilistic viewpoint, these regularization constraints can be expressed by a prior distribution of treated as a realization of the unknown segmentation a random field, for example, within a MRF framework [2], [27] or analytically, encoded via a local or global [13], [28] prior energy term added to the likelihood term. In this framework, we consider an energy function that sets a particular global constraint on the fusion process. This term restricts the number of regions (and indirectly, also penalizes small regions) in the resulting segmentation map. So we consider the energy function (6) where designates the number of regions (set of connected pixels belonging to the same class) in the segmented is the Heaviside (or unit step) function, and an image , internal parameter of our fusion model which physically represents the number of classes above which this prior constraint, limiting the number of regions, is taken into account. From the probabilistic viewpoint, this regularization constraint corresponds to a simple shifted (from ) exponential distribution decreasing with the number of regions displayed by the final segmentation. In this framework, a regularized solution corresponds to the maximum a posteriori (MAP) solution of our fusion model, i.e., that maximizes the posterior distribution the solution , and thus(7) with is the regularization parameter controlling the contribuexpressing fidelity to the set of segtion of the two terms; encoding our prior knowledge or mentations to be fused and beliefs concerning the types of acceptable final segmentations as estimates (segmentation with a number of limited regions). In this way, the resulting criteria used in this resulting fusion model can be viewed as a penalized maximum rand estimator. III. COARSE-TO-FINE OPTIMIZATION STRATEGY A. Multiresolution Minimization Strategy Our fusion procedure of several label fields emerges as an optimization problem of a complex non-convex cost function with several local extrema over the label parameter space. In order to find a particular configuration of , that efficiently minimizes this complex energy function, we can use a global optimization procedure such as a simulated annealing algorithm [27] whose advantages are twofold. First, it has the capability of avoiding local minima, and second, it does not require a good solution. initial guess in order to estimate the(5) where is the likelihood energy term of our generative fusion . model which has to be minimized in order to find Concretely, encodes the set of constraints, in terms of pairs of pixel labels (identical or not), provided by each of the segmentations to be fused. The minimization of finds the resulting segmentation which also optimizes the PRI criterion. E. Bayesian Fusion Model for Image Segmentation As previously described in Section II-B, the image segmentation problem is an ill-posed problem exhibiting multiple solu-1614IEEE TRANSACTIONS ON IMAGE PROCESSING, VOL. 19, NO. 6, JUNE 2010Fig. 1. Duplication and “coarse-to-fine” minimization strategy.An alternative approach to this stochastic and computationally expensive procedure is the iterative conditional modes (ICM) introduced by Besag [2]. This method is deterministic and simple, but has the disadvantage of requiring a proper initialization of the segmentation map close to the optimal solution. Otherwise it will converge towards a bad local minima . In order associated with our complex energy function to solve this problem, we could take, as initialization (first such as iteration), the segmentation map (8) i.e., in choosing for the first iteration of the ICM procedure amongst the segmentation to be fused, the one closest to the optimal solution of the Gibbs energy function of our fusion model [see (5)]. A more robust optimization method consists of a multiresolution approach combined with the classical ICM optimization procedure. In this strategy, rather than considering the minimization problem on the full and original configuration space, the original inverse problem is decomposed in a sequence of approximated optimization problems of reduced complexity. This drastically reduces computational effort and provides an accelerated convergence toward improved estimate. Experimentally, estimation results are nearly comparable to those obtained by stochastic optimization procedures as noticed, for example, in [10] and [29]. To this end, a multiresolution pyramid of segmentation maps is preliminarily derived, in order to for each at different resolution levels, and a set estimate a set of of similar spatial models is considered for each resolution level of the pyramidal data structure. At the upper level of the pyramidal structure (lower resolution level), the ICM optimization procedure is initialized with the segmentation map given by the procedure defined in (8). It may also be initialized by a random solution and, starting from this initial segmentation, it iterates until convergence. After convergence, the result obtained at this resolution level is interpolated (see Fig. 1) and then used as initialization for the next finer level and so on, until the full resolution level. B. Optimization of the Full Energy Function Experiments have shown that the full energy function of our model, (with the region based-global regularization constraint) is complex for some images. Consequently it is preferable toFig. 2. From top to bottom and left to right; A natural image from the Berkeley database (no. 134052) and the formation of its region process (algorithm PRIF ) at the (l = 3) upper level of the pyramidal structure at iteration [0–6], 8 (the last iteration) of the ICM optimization algorithm. Duplication and result of the ICM relaxation scheme at the finest level of the pyramid at iteration 0, 1, 18 (last iteration) and segmentation result (region level) after the merging of regions and the taking into account of the prior. Bottom: evolution of the Gibbs energy for the different steps of the multiresolution scheme.perform the minimization in two steps. In a first step, the minimization is performed without considering the global constraint (considering only ), with the previously mentioned multiresolution minimization strategy and the ICM optimization procedure until its convergence at full resolution level. At this finest resolution level, the minimization is then refined in a second step by identifying each region of the resulting segmentation map. This creates a region adjacency graph (a RAG is an undirected graph where the nodes represent connected regions of the image domain) and performs a region merging procedure by simply applying the ICM relaxation scheme on each region (i.e., by merging the couple of adjacent regions leading to a reduction of the cost function of the full model [see (7)] until convergence). In the second step, minimization can also be performed . according to the full modelMIGNOTTE: LABEL FIELD FUSION BAYESIAN MODEL AND ITS PENALIZED MAXIMUM RAND ESTIMATOR FOR IMAGE SEGMENTATION1615with its four nearest neighbors and a fixed number of connections (85 in our application), regularly spaced between all other pixels located within a square search window of fixed size 30 pixels centered around . Fig. 3 shows comparison of segmentation results with a fully connected graph computed on a search window two times larger. We decided to initialize the lower (or third upper) level of the pyramid with a sequence of 20 different random segmentations with classes. The full resolution level is then initialized with the duplication (see Fig. 1) of the best segmentation result (i.e., the one associated to the lowest Gibbs energy ) obtained after convergence of the ICM at this lower resolution level (see Fig. 2). We provide details of our optimization strategy in Algorithm 1. Algo I. Multiresolution minimization procedure (see also Fig. 2). Two-Step Multiresolution Minimization Set of segmentations to be fusedPairwise probabilities for each pixel pair computed over at resolution level 1. Initialization Step • Build multiresolution Pyramids from • Compute the pairwise probabilities from at resolution level 3 • Compute the pairwise probabilities from at full resolution PIXEL LEVEL Initialization: Random initialization of the upper level of the pyramidal structure with classes • ICM optimization on • Duplication (cf. Fig 1) to the full resolution • ICM optimization on REGION LEVEL for each region at the finest level do • ICM optimization onFig. 4. Segmentation (image no. 385028 from Berkeley database). From top to bottom and left to right; segmentation map respectively obtained by 1] our multiresolution optimization procedure: = 3402965 (algo), 2] SA : = 3206127, 3] rithm PRIF : = 3312794, 4] SA : = 3395572, 5] SA : = 3402162. SAFig. 3. Comparison of two segmentation results of our multiresolution fusion procedure (algorithm PRIF ) using respectively: left] a subsampled and fixed number of connections (85) regularly spaced and located within a square search window of size = 30 pixels. right] a fully connected graph computed on a search window two times larger (and requiring a computational load increased by 100).NUU 0 U 00 U 0 U 0D. Comparison With a Monoresolution Stochastic Relaxation In order to test the efficiency of our two-step multiresolution relaxation (MR) strategy, we have compared it to a standard monoresolution stochastic relaxation algorithm, i.e., a so-called simulated annealing (SA) algorithm based on the Gibbs sampler [27]. In order to restrict the number of iterations to be finite, we have implemented a geometric temperature cooling schedule , where is the [30] of the form starting temperature, is the final temperature, and is the maximal number of iterations. In this stochastic procedure, is crucial. The temperathe choice of the initial temperature ture must be sufficiently high in the first stages of simulatedC. Algorithm In order to decrease the computational load of our multiresolution fusion procedure, we only use two levels of resolution in our pyramidal structure (see Fig. 2): the full resolution and an image eight times smaller (i.e., at the third upper level of classical data pyramidal structure). We do not consider a complete graph: we consider that each node (or pixel) is connected。
《计算机视觉》题集
《计算机视觉》题集大题一:选择题1.下列哪项不属于计算机视觉的基本任务?A. 图像分类B. 目标检测C. 语音识别D. 语义分割2.在卷积神经网络(CNN)中,以下哪项操作不是卷积层的主要功能?A. 局部感知B. 权重共享C. 池化D. 特征提取3.下列哪个模型在图像分类任务中首次超过了人类的识别能力?A. AlexNetB. VGGNetC. ResNetD. GoogleNet4.以下哪个算法常用于图像中的特征点检测?A. SIFTB. K-meansC. SVMD. AdaBoost5.在目标检测任务中,IoU (Intersection over Union)主要用于衡量什么?A. 检测框与真实框的重叠程度B. 模型的检测速度C. 模型的准确率D. 模型的召回率6.下列哪项技术可以用于提高模型的泛化能力,减少过拟合?A. 数据增强B. 增加模型复杂度C. 减少训练数据量D. 使用更大的学习率7.在深度学习中,批归一化 (Batch Normalization)的主要作用是什么?A. 加速模型训练B. 提高模型精度C. 减少模型参数D. 防止梯度消失8.下列哪个激活函数常用于解决梯度消失问题?A. SigmoidB. TanhC. ReLUD. Softmax9.在进行图像语义分割时,常用的评估指标是?A. 准确率B. 召回率C. mIoU(mean Intersection over Union)D. F1分数10.下列哪个不是深度学习框架?A. TensorFlowB. PyTorchC. OpenCVD. Keras大题二:填空题1.计算机视觉中的“三大任务”包括图像分类、目标检测和______。
2.在深度学习模型中,为了防止梯度爆炸,常采用的技术是______。
3.在卷积神经网络中,池化层的主要作用是进行______。
4.YOLO算法是一种流行的______算法。
5.在进行图像增强时,常用的技术包括旋转、缩放、______和翻转等。
上海对外经贸大学课程资料市场营销(英)考试重点总结
名词解释1. Customer lifetime valueThe value of the entire stream of purchases that the customer would make over a lifetime of patronage2. Business portfolioThe collection of businesses and products that make up the company3. Market segmentationDividing a market into smaller groups with distinct needs, characteristics, or behaviors who might require separate products or marketing mixes.4. Market targetingThe process of evaluating each market segment's attractiveness and selecting one or more segments to enter5. Product lineA group of products that are closely related because they function in a similar manner, are sold to the same customer groups, are marketed through the same types of outlets, or fall within given price ranges.6. Product mix (or product portfolio)The set of all product lines and items that a particular seller offers for sale7. Vertical marketing system (VMS)A distribution channel structure in which producers, wholesalers, and retailers act as a unified system. One channel member owns the others, has contracts with them, or has so much power that they all cooperate.8. Horizontal marketing systems (HMS)A channel arrangement in which two or more companies at one level join together to follow a new marketing opportunity9. Integrated direct marketingDirect-marketing campaigns that use multiple vehicles and multiple stages to improve response rates and profits10. Integrated marketing communications (IMC)Carefully integrating and coordinating the company's many communications channels to deliver a clear, consistent, and compelling message about the organization and its products.Chapter 1Marketing Management Orientations1. Production conceptMarket situation: S <<DThe idea that consumers will favor products that are available and highly affordable and that the organization should therefore focus on improving production and distribution efficiency2. Product conceptMarket situation: S < DFirms that help the company to promote, sell, and distribute its goods to final buyers; they include resellers, physical distribution firms, marketing service agencies, and financial intermediaries.They include resellers, physical distribution firms, marketing services agencies, and financial intermediaries.4. Customer markets (5types)Consumer marketsConsist of individuals and households that buy goods and services for personal consumptionBusiness marketsReseller marketsGovernment marketsInternational markets5. CompetitorsMarketers must do more than simply adapt to the needs of target consumers. They also must gain strategic advantage by positioning their offerings strongly against competitors' offerings in the minds of consumers.6. PublicsAny group that has an actual or potential interest in or impact on an organization's ability to achieve its objectivesFinancial publicsMedia publicsGovernment publics Citizen-action publicsLocal publicsGeneral publicInternal publicsMacroenvironment1. Demographic environment Population size Population growth rateAge structure of the POP Gender structure of the POP Urbanization of China2. Economic environment IncomeGDPGDP per capita Disposable income p.c. Average wageSavingMarginal propensity to save Deposit p.c.SpendingMarginal propensity to consumeEngel coefficient3. Natural environmentShortages of raw materialsIncreased pollutionIncreased government intervention4. Technological environmentIt changes rapidlyNew technologies create new markets and new opportunity , e.g. the Internet of things5. Political environmentIncreasing legislationSocially responsible behavior6. Cultural environmentPersistence of Cultural ValuesShifts in Secondary Cultural ValuesChapter 5Model of Consumer BehaviorMKT & other stimuliMKT Other→Characteristics Affecting Consumer Behavior 1. Culture factorsCulture Subculture Social Class 2. Social factors Groups—Opinion leader—Person within a reference group who exerts social influence on othersProduct EconomicPrice TechPlace PoliticalPromotion Cultural Buyer ’s black box Buyercharacteristics Buyer decision processB uyer response Product choiceBrand choice Dealer choice Purchase timingPurchase amountChapter 6Evaluating Market SegmentsIn evaluating different market segments, a firm must look at three factors:-segment size and growth-segment structural attractiveness-According to Michael Porter, there are 5 forces influencing competition in an industry:Threat of new entrantsThreat of substitute productsBargaining power of suppliersBargaining power of buyersRivalry among competitors-company objectives and resourcesSelecting Target Market SegmentsUndifferentiated MarketingA market-coverage strategy in which a firm decides to ignore market segment differences and go after the whole market with one offer.No market segmentationOne product for all marketDifferentiated MarketingChapter 7Levels of Product and ServicesCore benefit/productIt addresses the question what is the buyer really buying?Actual productFeatures, design, quality level, brand name, and packagingAugmented productAdditional consumer services and benefits, such as after-sale S., warranty, installation, delivery and creditProduct Mix DecisionsWidth: the number of PLsLength: the total number of itemsDepth: the number of versions offered of each product in the line Consistency: how closely related the various PLs are in end use, production requirements, distribution channels, or some other wayRequirements of brand name selection.It should suggest something about the product's benefits and qualities.It should be easy to pronounce, recognize, and remember.The brand name should be distinctive.IntroductionIntroduction is a period of slow sales growth.Profits are nonexistent in this stage because of the heavy expenses of product introduction.GrowthGrowth is a period of rapid market acceptance and increasing profits.MaturityMaturity is a period of slowdown in sales growth because the product has achieved acceptance by most potential buyers.Profits level off or decline because of increased marketing outlays to defend the product against competition.DeclineDecline is the period when sales fall off and profits drop.Chapter 9Cost-plus pricingAdding a standard markup to the cost of the productMarkup Price = Unit Cost∕(1- Desired Return on Sales)Types of DiscountCash discount: a price reduction to buyers who pay their bills promptlyQuantity discount: a price reduction to buyers who buy large volumes Functional discount (trade discount): offered by the seller to trade-channel members who perform certain functions, such as selling, storing, and record keeping.Seasonal discount: a price reduction to buyers who buy merchandise or services out of season.Chapter 10Functions of marketing channelInformationPromotionContactMatchingNegotiationPhysical distributionFinancingRisk takingVertical Marketing Systems (VMS)Corporate VMSA VMS that combines successive stages of production and distribution under single ownership —channel leadership is established through common ownership.Contractual VMSA VMS in which independent firms at different levels of production and distribution join together through contracts to obtain more economies or sales impact than they could achieve alone.Franchise organizationsM-sponsored retailer F; FordM-sponsored wholesaler F; Coca-ColaService-firm-sponsored retailer F; KFCAdministered VMSA VMS that coordinates successive stages of production and distribution, not through common ownership or contractual ties, but through the size and power of one of the partiesChapter 11(书p275)Stores based on product lineSpecialty storeDepartment storeSupermarketConvenience storeSuperstoreDiscount storeOff-price retailersChapter 12Setting advertising objectivesInformative AdvertisingCommunicating customer valueTelling the market about a new productExplaining how the product worksSuggesting new uses for a productInforming the market of a price changeDescribing available servicesCorrecting false impressionsBuilding a brand and company imagePersuasive AdvertisingBuilding brand preferenceEncouraging switching to your brandChanging customer's perception of product attributesPersuading customers to purchase nowPersuading customers to receive a sales callConvincing customers to tell others about the brandReminder AdvertisingMaintaining customer relationshipsReminding consumers that the product may be needed in the near futureReminding consumers where to buy the productKeeping the brand in customer's minds during off-seasonsSetting the Total Promotion Budget (advertising)(找不到。
alcmtr
alcmtrALCMTR: An Introduction to a Powerful Analytical ToolIntroduction:In today's fast-paced world, data holds a critical place in decision-making and improving business operations. Advanced analytics tools empower businesses to extract meaningful insights from large amounts of data. One such tool is ALCMTR, a powerful analytical tool designed to assist organizations in data analysis and provide valuable insights for strategic planning. In this document, we will explore the features, benefits, and use cases of ALCMTR, highlighting how it can contribute to an organization's success.1. What is ALCMTR?ALCMTR stands for Advanced Data Analytics and Lifecycle Management Tool. It provides a comprehensive platform for organizations to process, analyze, and visualize their data. With its user-friendly interface, ALCMTR allows users to interact with data, generate reports, and gain actionable insights. Whether it is financial data, customer data, or operational data, ALCMTR can handle all types of information and transform it into valuable business intelligence.2. Key Features of ALCMTR:a. Data Integration: ALCMTR allows organizations to integrate data from multiple sources, providing a unified view for analysis. The tool supports various data formats, including structured, unstructured, and semi-structured, making it versatile for different data types.b. Advanced Analytics: ALCMTR enables organizations to perform advanced analytics techniques such as predictive modeling, regression analysis, clustering, and classification. These techniques help identify patterns, trends, and relationships in data, paving the way for data-driven decision-making.c. Visualization: ALCMTR offers powerful visualization capabilities, allowing users to create interactive charts, graphs, and dashboards. Visual representation of data helps in better understanding and interpretation of complex information.d. Data Exploration: ALCMTR's intuitive interface enables users to explore and analyze data effortlessly. Users can apply filters, sort data, and drill down into specific details for a deeper understanding.e. Collaboration and Sharing: ALCMTR facilitates collaboration among team members by providing the option to share reports, dashboards, and analysis results. This fosters knowledge sharing and ensures that all stakeholders are on the same page.3. Benefits of ALCMTR:a. Improved Decision-Making: ALCMTR helps organizations make data-driven decisions by providing accurate and timely insights. This reduces guesswork and minimizes the risk of making decisions based on incomplete or inaccurate information.b. Increased Efficiency: By automating data analysis and visualization processes, ALCMTR saves time for organizations. With its user-friendly features, users can easily analyze data without the need for extensive technical expertise or programming skills.c. Cost Savings: ALCMTR eliminates the need for manual data handling and reduces the dependence on multiple tools for data analysis. This streamlines operations and leads to cost savings for organizations.d. Competitive Advantage: With ALCMTR, organizations can gain a competitive edge by leveraging data to uncover market trends, customer preferences, and opportunities. This helps organizations stay ahead in an ever-evolving business landscape.4. Use Cases of ALCMTR:a. Financial Analysis: ALCMTR can be utilized in financial institutions for risk assessment, fraud detection, and portfolio analysis. By analyzing financial data in real-time, organizations can make informed decisions to mitigate risks and maximize profitability.b. Marketing and Customer Analytics: ALCMTR can help businesses analyze customer data, segment customers, and develop targeted marketing campaigns. By understanding customer preferences and behavior, organizations can personalize their offerings and improve customer satisfaction.c. Supply Chain Optimization: ALCMTR can analyze supply chain data to identify bottlenecks, optimize inventory management, and improve efficiency. Organizations can minimize costs, reduce lead times, and enhance overall supply chain performance.d. Healthcare Analytics: ALCMTR can assist healthcare organizations in analyzing patient data, predicting disease outbreaks, and improving healthcare outcomes. It enables healthcare professionals to identify patterns and make informed decisions for better patient care.Conclusion:ALCMTR is an advanced analytics tool that empowers organizations to unlock the true potential of their data. With its comprehensive features and user-friendly interface, ALCMTR provides valuable insights, improves decision-making, and delivers a competitive advantage. By harnessing the power of ALCMTR, organizations can make data-driven strategies, streamline operations, and achieve overall business success in today's data-driven world.。
normalized cuts and image segmentation翻译
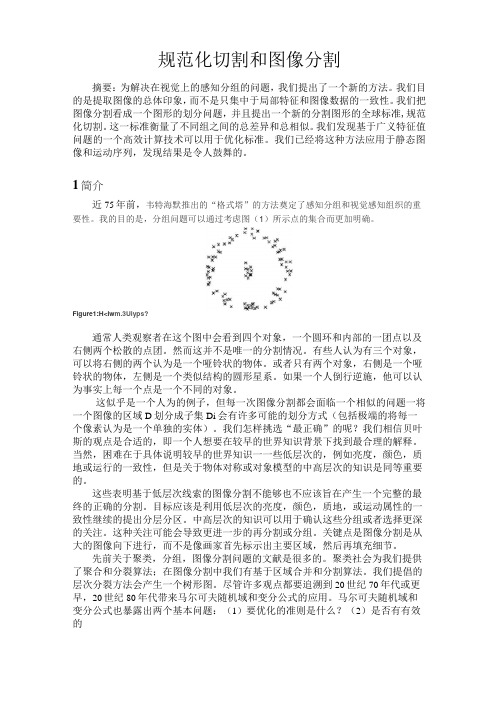
规范化切割和图像分割摘要:为解决在视觉上的感知分组的问题,我们提出了一个新的方法。
我们目的是提取图像的总体印象,而不是只集中于局部特征和图像数据的一致性。
我们把图像分割看成一个图形的划分问题,并且提出一个新的分割图形的全球标准,规范化切割。
这一标准衡量了不同组之间的总差异和总相似。
我们发现基于广义特征值问题的一个高效计算技术可以用于优化标准。
我们已经将这种方法应用于静态图像和运动序列,发现结果是令人鼓舞的。
1简介近75年前,韦特海默推出的“格式塔”的方法奠定了感知分组和视觉感知组织的重要性。
我的目的是,分组问题可以通过考虑图(1)所示点的集合而更加明确。
Figure1:H<iw m.3Uiyps?通常人类观察者在这个图中会看到四个对象,一个圆环和内部的一团点以及右侧两个松散的点团。
然而这并不是唯一的分割情况。
有些人认为有三个对象,可以将右侧的两个认为是一个哑铃状的物体。
或者只有两个对象,右侧是一个哑铃状的物体,左侧是一个类似结构的圆形星系。
如果一个人倒行逆施,他可以认为事实上每一个点是一个不同的对象。
这似乎是一个人为的例子,但每一次图像分割都会面临一个相似的问题一将一个图像的区域D划分成子集Di会有许多可能的划分方式(包括极端的将每一个像素认为是一个单独的实体)。
我们怎样挑选“最正确”的呢?我们相信贝叶斯的观点是合适的,即一个人想要在较早的世界知识背景下找到最合理的解释。
当然,困难在于具体说明较早的世界知识一一些低层次的,例如亮度,颜色,质地或运行的一致性,但是关于物体对称或对象模型的中高层次的知识是同等重要的。
这些表明基于低层次线索的图像分割不能够也不应该旨在产生一个完整的最终的正确的分割。
目标应该是利用低层次的亮度,颜色,质地,或运动属性的一致性继续的提出分层分区。
中高层次的知识可以用于确认这些分组或者选择更深的关注。
这种关注可能会导致更进一步的再分割或分组。
关键点是图像分割是从大的图像向下进行,而不是像画家首先标示出主要区域,然后再填充细节。
深度网络设计知识测试 选择题 63题

1. 在深度学习中,卷积神经网络(CNN)主要用于哪种类型的数据?A. 文本数据B. 图像数据C. 音频数据D. 时间序列数据2. 以下哪种激活函数在深度网络中最为常用?A. SigmoidB. TanhC. ReLUD. Softmax3. 批量归一化(Batch Normalization)的主要作用是什么?A. 加速训练B. 防止过拟合C. 提高模型精度D. 减少计算量4. 在CNN中,池化层的主要作用是什么?A. 增加特征图的深度B. 减少特征图的尺寸C. 增加特征图的尺寸D. 减少特征图的深度5. 以下哪种优化算法在深度学习中可以避免梯度消失问题?A. SGDB. AdamC. RMSpropD. Momentum6. 在深度学习中,Dropout是一种常用的什么技术?A. 正则化B. 归一化C. 优化D. 初始化7. 以下哪种损失函数常用于分类任务?A. 均方误差B. 交叉熵损失C. 绝对值损失D. 对数损失8. 在RNN中,以下哪种结构可以处理长序列依赖问题?A. LSTMB. GRUC. 简单RNND. 双向RNN9. 以下哪种技术可以用于减少深度网络的过拟合?A. 数据增强B. 批量归一化C. 学习率衰减D. 梯度裁剪10. 在深度学习中,以下哪种层不是卷积层?A. 全连接层B. 池化层C. 归一化层D. 激活层11. 以下哪种方法可以用于深度网络的特征可视化?A. t-SNEB. PCAC. UMAPD. LLE12. 在深度学习中,以下哪种技术可以用于处理不平衡数据集?A. 重采样B. 权重调整C. 集成学习D. 数据增强13. 以下哪种网络结构常用于图像分割任务?A. CNNB. RNNC. GAND. U-Net14. 在深度学习中,以下哪种技术可以用于提高模型的泛化能力?A. 正则化B. 归一化C. 优化D. 初始化15. 以下哪种方法可以用于深度网络的模型压缩?A. 剪枝B. 量化C. 蒸馏D. 以上都是16. 在深度学习中,以下哪种技术可以用于处理多任务学习?A. 共享层B. 独立层C. 混合层D. 以上都不是17. 以下哪种方法可以用于深度网络的模型解释?A. LIMEB. SHAPC. Grad-CAMD. 以上都是18. 在深度学习中,以下哪种技术可以用于处理序列数据?A. CNNB. RNNC. GAND. Autoencoder19. 以下哪种方法可以用于深度网络的模型集成?A. BaggingB. BoostingC. StackingD. 以上都是20. 在深度学习中,以下哪种技术可以用于处理半监督学习?A. 自编码器B. 生成对抗网络C. 半监督损失D. 以上都是21. 以下哪种方法可以用于深度网络的模型迁移?A. 微调B. 特征提取C. 领域适应D. 以上都是22. 在深度学习中,以下哪种技术可以用于处理无监督学习?A. 聚类B. 降维C. 自编码器D. 以上都是23. 以下哪种方法可以用于深度网络的模型评估?A. 交叉验证B. 留一法C. 混淆矩阵D. 以上都是24. 在深度学习中,以下哪种技术可以用于处理异常检测?A. 自编码器B. 生成对抗网络C. 孤立森林D. 以上都是25. 以下哪种方法可以用于深度网络的模型优化?A. 学习率衰减B. 梯度裁剪C. 动量优化D. 以上都是26. 在深度学习中,以下哪种技术可以用于处理图像生成?A. CNNB. RNNC. GAND. Autoencoder27. 以下哪种方法可以用于深度网络的模型解释?A. LIMEB. SHAPC. Grad-CAMD. 以上都是28. 在深度学习中,以下哪种技术可以用于处理文本生成?A. CNNB. RNNC. GAND. Autoencoder29. 以下哪种方法可以用于深度网络的模型压缩?A. 剪枝B. 量化C. 蒸馏D. 以上都是30. 在深度学习中,以下哪种技术可以用于处理多标签分类?A. 二分类B. 多分类C. 多标签损失D. 以上都是31. 以下哪种方法可以用于深度网络的模型集成?A. BaggingB. BoostingC. StackingD. 以上都是32. 在深度学习中,以下哪种技术可以用于处理时间序列预测?A. CNNB. RNNC. GAND. Autoencoder33. 以下哪种方法可以用于深度网络的模型解释?A. LIMEB. SHAPC. Grad-CAMD. 以上都是34. 在深度学习中,以下哪种技术可以用于处理图像识别?A. CNNB. RNNC. GAND. Autoencoder35. 以下哪种方法可以用于深度网络的模型优化?A. 学习率衰减B. 梯度裁剪C. 动量优化D. 以上都是36. 在深度学习中,以下哪种技术可以用于处理图像增强?A. 数据增强B. 图像变换C. 图像合成D. 以上都是37. 以下哪种方法可以用于深度网络的模型解释?A. LIMEB. SHAPC. Grad-CAMD. 以上都是38. 在深度学习中,以下哪种技术可以用于处理文本分类?A. CNNB. RNNC. GAND. Autoencoder39. 以下哪种方法可以用于深度网络的模型压缩?A. 剪枝B. 量化C. 蒸馏D. 以上都是40. 在深度学习中,以下哪种技术可以用于处理多任务学习?A. 共享层B. 独立层C. 混合层D. 以上都不是41. 以下哪种方法可以用于深度网络的模型集成?A. BaggingB. BoostingC. StackingD. 以上都是42. 在深度学习中,以下哪种技术可以用于处理半监督学习?A. 自编码器B. 生成对抗网络C. 半监督损失D. 以上都是43. 以下哪种方法可以用于深度网络的模型迁移?A. 微调B. 特征提取C. 领域适应D. 以上都是44. 在深度学习中,以下哪种技术可以用于处理无监督学习?A. 聚类B. 降维C. 自编码器D. 以上都是45. 以下哪种方法可以用于深度网络的模型评估?A. 交叉验证B. 留一法C. 混淆矩阵D. 以上都是46. 在深度学习中,以下哪种技术可以用于处理异常检测?A. 自编码器B. 生成对抗网络C. 孤立森林D. 以上都是47. 以下哪种方法可以用于深度网络的模型优化?A. 学习率衰减B. 梯度裁剪C. 动量优化D. 以上都是48. 在深度学习中,以下哪种技术可以用于处理图像生成?A. CNNB. RNNC. GAND. Autoencoder49. 以下哪种方法可以用于深度网络的模型解释?A. LIMEB. SHAPC. Grad-CAMD. 以上都是50. 在深度学习中,以下哪种技术可以用于处理文本生成?A. CNNB. RNNC. GAND. Autoencoder51. 以下哪种方法可以用于深度网络的模型压缩?A. 剪枝B. 量化C. 蒸馏D. 以上都是52. 在深度学习中,以下哪种技术可以用于处理多标签分类?A. 二分类B. 多分类C. 多标签损失D. 以上都是53. 以下哪种方法可以用于深度网络的模型集成?A. BaggingB. BoostingC. StackingD. 以上都是54. 在深度学习中,以下哪种技术可以用于处理时间序列预测?A. CNNB. RNNC. GAND. Autoencoder55. 以下哪种方法可以用于深度网络的模型解释?A. LIMEB. SHAPC. Grad-CAMD. 以上都是56. 在深度学习中,以下哪种技术可以用于处理图像识别?A. CNNB. RNNC. GAND. Autoencoder57. 以下哪种方法可以用于深度网络的模型优化?A. 学习率衰减B. 梯度裁剪C. 动量优化D. 以上都是58. 在深度学习中,以下哪种技术可以用于处理图像增强?A. 数据增强B. 图像变换C. 图像合成D. 以上都是59. 以下哪种方法可以用于深度网络的模型解释?A. LIMEB. SHAPC. Grad-CAMD. 以上都是60. 在深度学习中,以下哪种技术可以用于处理文本分类?A. CNNB. RNNC. GAND. Autoencoder61. 以下哪种方法可以用于深度网络的模型压缩?A. 剪枝B. 量化C. 蒸馏D. 以上都是62. 在深度学习中,以下哪种技术可以用于处理多任务学习?A. 共享层B. 独立层C. 混合层D. 以上都不是63. 以下哪种方法可以用于深度网络的模型集成?A. BaggingB. BoostingC. StackingD. 以上都是答案1. B2. C3. A4. B5. B6. A7. B8. A9. A10. A11. A12. A13. D14. A15. D16. A17. D18. B19. D20. D21. D22. D23. D24. D25. D26. C27. D28. B29. D30. C31. D32. B33. D34. A35. D36. D37. D38. A39. D40. A41. D42. D43. D44. D45. D46. D47. D48. C49. D50. B51. D52. C53. D54. B55. D56. A57. D58. D59. D60. A61. D62. A63. D。
segment anything解读

Segment AnythingIntroductionIn the field of computer vision, image segmentation refers to the process of dividing an image into multiple segments or regions. These segments are typically defined by boundaries that separate different objects or areas within the image. The task of segmenting anything involves applying segmentation techniques to various types of images, regardless of the content or complexity.Importance of Image SegmentationImage segmentation plays a crucial role in many computer vision applications, including object recognition, scene understanding, and image editing. By segmenting an image into meaningful regions, we can extract valuable information about the objects present in the scene. This information can be used for further analysis or to enhance the interpretation of the image.Challenges in Segmenting AnythingSegmenting anything presents several challenges due to the diverse nature and complexity of images. Some common challenges include: 1. Varying Object Shapes: Objects in images can have different shapes and sizes, making it difficult to define a universal segmentation approach.2. Complex Backgrounds: Images often contain complex backgrounds that can interfere with accurate segmentation.3. Object Occlusion: Objects may be partially occluded by other objects or by themselves, making it challenging to separate them from their surroundings.4. Ambiguity: Certain objects or regions in an image may have ambiguous boundaries, making it difficult to determine their exact segmentation.Techniques for Segmenting AnythingVarious techniques have been developed to address these challenges and perform accurate segmentation on diverse types of images. Here are some commonly used techniques:1. ThresholdingThresholding is a simple yet effective technique that separates pixels based on their intensity values. It involves setting a threshold value and classifying pixels as foreground or background based on whethertheir intensity is above or below the threshold.2. Edge-Based MethodsEdge-based methods focus on detecting abrupt changes in pixel intensity, which often correspond to object boundaries. These methods use edge detection algorithms, such as the Canny edge detector, to identify edges and segment objects based on the detected edges.3. Region-Based MethodsRegion-based methods group pixels into regions based on their similarity in color, texture, or other features. These methods often involve iterative processes, such as region growing or region splitting and merging, to gradually segment the image into distinct regions.4. Deep Learning ApproachesDeep learning approaches have gained popularity in recent years for image segmentation tasks. Convolutional Neural Networks (CNNs) are commonly used to learn features and perform pixel-wise classification to segment objects in an image. Popular architectures for image segmentation include U-Net and Mask R-CNN.Evaluation Metrics for Image SegmentationTo assess the performance of segmentation algorithms, various evaluation metrics are used. Some common metrics include:1.Intersection over Union (IoU): IoU measures the overlap betweenthe predicted segmentation mask and the ground truth mask. It iscalculated as the intersection area divided by the union area ofthe two masks.2.Pixel Accuracy: Pixel accuracy measures the percentage ofcorrectly classified pixels in the segmentation mask compared tothe ground truth mask.3.Mean Intersection over Union (mIoU): mIoU calculates the averageIoU across multiple segmented objects or regions in an image.Applications of Segmenting AnythingSegmentation techniques find applications in a wide range of fields, including:1.Medical Imaging: Image segmentation is used for tumor detection,organ delineation, and diagnosis in medical imaging applications. 2.Autonomous Driving: Segmenting objects such as pedestrians,vehicles, and traffic signs is crucial for autonomous vehicles’perception systems.3.Video Surveillance: Image segmentation aids in tracking movingobjects and identifying suspicious activities in surveillancevideos.4.Image Editing: Segmenting images allows for targeted adjustmentsand manipulations, such as background removal or objectreplacement.ConclusionSegmenting anything is a challenging yet essential task in computer vision. By applying various segmentation techniques and evaluation metrics, we can extract meaningful information from images and enable advanced applications in multiple domains. As technology continues to advance, we can expect further improvements in segmentation algorithms, leading to more accurate and efficient segmentation of any type of image.。
数字图像处理英文原版及翻译
数字图象处理英文原版及翻译Digital Image Processing: English Original Version and TranslationIntroduction:Digital Image Processing is a field of study that focuses on the analysis and manipulation of digital images using computer algorithms. It involves various techniques and methods to enhance, modify, and extract information from images. In this document, we will provide an overview of the English original version and translation of digital image processing materials.English Original Version:The English original version of digital image processing is a comprehensive textbook written by Richard E. Woods and Rafael C. Gonzalez. It covers the fundamental concepts and principles of image processing, including image formation, image enhancement, image restoration, image segmentation, and image compression. The book also explores advanced topics such as image recognition, image understanding, and computer vision.The English original version consists of 14 chapters, each focusing on different aspects of digital image processing. It starts with an introduction to the field, explaining the basic concepts and terminology. The subsequent chapters delve into topics such as image transforms, image enhancement in the spatial domain, image enhancement in the frequency domain, image restoration, color image processing, and image compression.The book provides a theoretical foundation for digital image processing and is accompanied by numerous examples and illustrations to aid understanding. It also includes MATLAB codes and exercises to reinforce the concepts discussed in each chapter. The English original version is widely regarded as a comprehensive and authoritative reference in the field of digital image processing.Translation:The translation of the digital image processing textbook into another language is an essential task to make the knowledge and concepts accessible to a wider audience. The translation process involves converting the English original version into the target language while maintaining the accuracy and clarity of the content.To ensure a high-quality translation, it is crucial to select a professional translator with expertise in both the source language (English) and the target language. The translator should have a solid understanding of the subject matter and possess excellent language skills to convey the concepts accurately.During the translation process, the translator carefully reads and comprehends the English original version. They then analyze the text and identify any cultural or linguistic nuances that need to be considered while translating. The translator may consult subject matter experts or reference materials to ensure the accuracy of technical terms and concepts.The translation process involves several stages, including translation, editing, and proofreading. After the initial translation, the editor reviews the translated text to ensure its coherence, accuracy, and adherence to the target language's grammar and style. The proofreader then performs a final check to eliminate any errors or inconsistencies.It is important to note that the translation may require adapting certain examples, illustrations, or exercises to suit the target language and culture. This adaptation ensures that the translated version resonates with the local audience and facilitates better understanding of the concepts.Conclusion:Digital Image Processing: English Original Version and Translation provides a comprehensive overview of the field of digital image processing. The English original version, authored by Richard E. Woods and Rafael C. Gonzalez, serves as a valuable reference for understanding the fundamental concepts and techniques in image processing.The translation process plays a crucial role in making this knowledge accessible to non-English speakers. It involves careful selection of a professional translator, thoroughunderstanding of the subject matter, and meticulous translation, editing, and proofreading stages. The translated version aims to accurately convey the concepts while adapting to the target language and culture.By providing both the English original version and its translation, individuals from different linguistic backgrounds can benefit from the knowledge and advancements in digital image processing, fostering international collaboration and innovation in this field.。
CVPR2013总结

CVPR2013总结前不久的结果出来了,⾸先恭喜我⼀个已经毕业⼯作的师弟中了⼀篇。
完整的⽂章列表已经在CVPR的主页上公布了(),今天把其中⼀些感兴趣的整理⼀下,虽然论⽂下载的链接⼤部分还都没出来,不过可以follow最新动态。
等下载链接出来的时候⼀⼀补上。
由于没有下载链接,所以只能通过题⽬和作者估计⼀下论⽂的内容。
难免有偏差,等看了论⽂以后再修正。
显著性Saliency Aggregation: A Data-driven Approach Long Mai, Yuzhen Niu, Feng Liu 现在还没有搜到相关的资料,应该是多线索的⾃适应融合来进⾏显著性检测的PISA: Pixelwise Image Saliency by Aggregating Complementary Appearance Contrast Measures with Spatial Priors Keyang Shi, Keze Wang, Jiangbo Lu, Liang Lin 这⾥的两个线索看起来都不新,应该是集成框架⽐较好。
⽽且像素级的,估计能达到分割或者matting的效果Looking Beyond the Image: Unsupervised Learning for Object Saliency and Detection Parthipan Siva, Chris Russell, Tao Xiang, 基于学习的的显著性检测Learning video saliency from human gaze using candidate selection , Dan Goldman, Eli Shechtman, Lihi Zelnik-Manor这是⼀个做视频显著性的,估计是选择显著的视频⽬标Hierarchical Saliency Detection Qiong Yan, Li Xu, Jianping Shi, Jiaya Jia的学⽣也开始做显著性了,多尺度的⽅法Saliency Detection via Graph-Based Manifold Ranking Chuan Yang, Lihe Zhang, Huchuan Lu, Ming-Hsuan Yang, Xiang Ruan这个应该是扩展了那个经典的 graph based saliency,应该是⽤到了显著性传播的技巧Salient object detection: a discriminative regional feature integration approach , Jingdong Wang, Zejian Yuan, , Nanning Zheng⼀个多特征⾃适应融合的显著性检测⽅法Submodular Salient Region Detection , Larry Davis⼜是⼤⽜下⾯的⽂章,提法也很新颖,⽤了submodular。
HighqualityMotionDeblurringfromaSingleImage(运动图像去模糊)中文翻译
高质量单幅图片运动去模糊celerychen 译摘要:我们提出了一种从单一图片去除运动模糊的算法。
我们的方法在去模糊图像的计算过程中,对于卷积核的估计和清晰图像,采用统一的概率模型。
我们分析了当前去模糊方法中通常存在的人工痕迹的产生原因,而后在我们的概率模型中引入了一些新的术语。
这些术语包括模糊图像噪声的空域随机模型,还有新的局部平滑先验知识。
通过对比度约束,即使是低对比的模糊图像,也能减少人工振铃效应。
最后,我们描述了一种有效的优化方案,通过交替估计模糊核和清晰图像的复原过程直到收敛。
经过这些步骤,我们能够在一个低的计算复杂度的时间内获得一个高质量的清晰图像。
我们的方法生成的图像质量相当于用多张模糊图片生成的清晰图片的效果,而后者的方法需要额外的硬件资源。
关键字运动去模糊人工振铃图像增强滤波1.介绍数字摄像机最常见的人工痕迹之一是由于相机的抖动引起的运动模糊。
在很多情况下,光线不足,要避免使用快速的长快门;这一不可避免将使我们的快照变得模糊和令人失望。
在数字图像处理领域,从单张运动模糊的照片中恢复出清晰的图像,是一个长期和根本性的研究课题。
如果我们假定模糊核,或者说是点扩散函数PSF是线性时不变的,这一问题可以被概括为图像的反卷积问题。
图像的反卷积问题可以进一步分为盲反卷积和非盲反卷积。
在非盲反卷积的问题当中,卷积核被认为是已知的或者在别处已经计算得出了,剩下的问题就是估计不模糊的清晰的自然图像。
传统的方法例如维纳滤波和RL反卷积方法在几十年之前就已经被提出了。
但是,他们现在仍然被广泛采用,因为他们简单高效。
然而,这些方法在在图像的强边缘出易于产生令人生厌的人工振铃的痕迹。
盲反卷积问题当中,卷积核和清晰的自然图像均是未知的,而且问题甚至是高度病态的。
自然图像结构的复杂性和卷积核形状的任意性,很容易使得先验概率的估计出现过拟合或欠拟合。
在本论文当中,我们通过探究盲反卷积问题产生的可视人工痕迹例如振铃效应产生的原因开始。
《计算机视觉》期末考试试卷附答案
《计算机视觉》期末考试试卷附答案一、选择题(每题2分,共计20分)1. 计算机视觉的主要任务不包括以下哪项?A. 图像分类B. 目标检测C. 图像增强D. 图像分割{答案:C}2. 以下哪个不是卷积神经网络(CNN)的主要优点?A. 参数共享B. 局部感知野C. 需要大量标注数据D. 层次化特征提取{答案:C}3. 以下哪种损失函数常用于图像分类任务?A. softmax损失函数B. 交叉熵损失函数C. 均方误差损失函数D. hinge损失函数{答案:A}4. 在目标检测中,R-CNN系列算法主要包括以下哪些步骤?A. 区域提议网络B. 卷积神经网络特征提取C. 分类与边界框回归D. 非极大值抑制{答案:ABCD}5. 以下哪个是最常见的图像增强方法?A. 随机裁剪B. 直方图均衡化C. 对比度增强D. 数据扩充{答案:B}二、填空题(每题2分,共计20分)1. 在卷积神经网络中,卷积层的主要作用是______。
{答案:局部感知、参数共享、特征提取}2. 支持向量机(SVM)的核心思想是______。
{答案:找到一个最优的超平面,最大化不同类别之间的边界} 3. 目标检测中的实时性要求较高的算法有______。
{答案:YOLO、SSD、Faster R-CNN}4. 图像分割的主要任务是将图像划分为若干个______。
{答案:区域或像素块,具有相似的特征}5. 在深度学习框架TensorFlow中,创建一个全连接层可以使用______。
{答案:yers.dense}三、简答题(每题10分,共计30分)1. 请简要描述卷积神经网络(CNN)的工作原理及主要优点。
{答案:卷积神经网络是一种特殊的神经网络,它通过卷积层、池化层和全连接层进行特征提取和分类。
主要优点包括参数共享、局部感知、层次化特征提取等。
}2. 请简要介绍目标检测的主要任务、方法和挑战。
{答案:目标检测的主要任务是在图像中定位和识别物体。
画像英语作文模板
画像英语作文模板英文回答:1. What is image composition?Image composition is the arrangement of visual elements within a frame to create a visually appealing and meaningful image. It involves the use of elements such as line, shape, color, and texture to create a sense of unity and balance, and to guide the viewer's eye through the image.2. What are the basic principles of image composition?The basic principles of image composition include:Rule of thirds: Dividing the frame into thirds horizontally and vertically creates nine equal sections. Placing important elements along these lines or at their intersections can help create a balanced and visuallypleasing image.Leading lines: Lines within the image can be used to lead the viewer's eye through the image and draw attention to important elements.Negative space: The empty space around and between objects in the frame can be used to create a sense of depth and to highlight important elements.Color harmony: Using colors that complement each other or create a sense of unity can help create a visually appealing image.Contrast: Creating contrast between light and dark areas, or between different colors, can help create a sense of depth and interest.3. How can I improve my image composition skills?There are several ways to improve your image composition skills, including:Practice: The more you practice, the better you'll become at arranging visual elements in a visually appealing way.Study other photographers: Look at the work of other photographers to see how they use composition to create successful images.Use a grid: Using a grid overlay on your camera or editing software can help you align elements and create a balanced composition.Experiment with different perspectives: Shooting from different angles and perspectives can give your images a unique and interesting look.4. What are some common mistakes to avoid in image composition?Some common mistakes to avoid in image composition include:Overcrowding the frame: Trying to fit too many elements into the frame can create a cluttered and confusing image.Placing important elements in the center: Placing important elements in the dead center of the frame can make the image look static and uninteresting.Not using negative space: Leaving too much empty space in the frame can make the image look empty and uninviting.Using too much contrast: Using too much contrast can make the image look harsh and unpleasant.Ignoring the background: The background of your image can play an important role in the overall composition. Make sure it doesn't distract from the main subject.中文回答:1. 什么是图像构图?图像构图是在一个特定的框架内对视觉元素进行排列,以创造一个在视觉上赏心悦目且富有意义的图像。
图像处理专业英语词汇
图像处理专业英语词汇Introduction:As a professional in the field of image processing, it is important to have a strong command of the relevant technical terminology in English. This will enable effective communication with colleagues, clients, and stakeholders in the industry. In this document, we will provide a comprehensive list of commonly used English vocabulary related to image processing, along with their definitions and usage examples.1. Image Processing:Image processing refers to the manipulation and analysis of digital images using computer algorithms. It involves various techniques such as image enhancement, restoration, segmentation, and recognition.2. Pixel:A pixel, short for picture element, is the smallest unit of a digital image. It represents a single point in an image and contains information about its color and intensity.Example: The resolution of a digital camera is determined by the number of pixels it can capture in an image.3. Resolution:Resolution refers to the level of detail that can be captured or displayed in an image. It is typically measured in pixels per inch (PPI) or dots per inch (DPI).Example: Higher resolution images provide sharper and more detailed visuals.4. Image Enhancement:Image enhancement involves improving the quality of an image by adjusting its brightness, contrast, sharpness, and color balance.Example: The image processing software offers a range of tools for enhancing photographs.5. Image Restoration:Image restoration techniques are used to remove noise, blur, or other distortions from an image and restore it to its original quality.Example: The image restoration algorithm successfully eliminated the noise in the scanned document.6. Image Segmentation:Image segmentation is the process of dividing an image into multiple regions or objects based on their characteristics, such as color, texture, or intensity.Example: The image segmentation algorithm accurately separated the foreground and background objects.7. Image Recognition:Image recognition involves identifying and classifying objects or patterns in an image using machine learning and computer vision techniques.Example: The image recognition system can accurately recognize and classify different species of flowers.8. Histogram:A histogram is a graphical representation of the distribution of pixel intensities in an image. It shows the frequency of occurrence of different intensity levels.Example: The histogram analysis revealed a high concentration of dark pixels in the image.9. Edge Detection:Edge detection is a technique used to identify and highlight the boundaries between different objects or regions in an image.Example: The edge detection algorithm accurately detected the edges of the objects in the image.10. Image Compression:Image compression is the process of reducing the file size of an image without significant loss of quality. It is achieved by removing redundant or irrelevant information from the image.Example: The image compression algorithm reduced the file size by 50% without noticeable loss of image quality.11. Morphological Operations:Morphological operations are a set of image processing techniques used to analyze and manipulate the shape and structure of objects in an image.Example: The morphological operations successfully removed small noise particles from the image.12. Feature Extraction:Feature extraction involves identifying and extracting relevant features or characteristics from an image for further analysis or classification.Example: The feature extraction algorithm extracted texture features from the image for cancer detection.Conclusion:This comprehensive list of English vocabulary related to image processing provides a solid foundation for effective communication in the field. By familiarizing yourself with these terms and their usage, you will be better equipped to collaborate, discuss, andpresent ideas in the context of image processing. Remember to continuously update your knowledge as the field evolves and new techniques emerge.。
MBA联考英语真题
M B A联考英语真题Revised on July 13, 2021 at 16:25 pm经典资料;WORD文档;可编辑修改经典考试资料;答案附后;看后必过;WORD文档;可修改2015年硕士研究生入学考试英语二真题及参考答案说明:由于2012年试题为一题多卷;因此现场试卷中的选择题部分;不同考生有不同顺序..请在核对答案时注意题目和选项的具体内容..Section I Use of EnglishDirections:Read the following text. Choose the best words for each numbered black and mark A; B; C or D on ANSWER SHEET 1. 10 pointsMillions of Americans and foreigners see GI.Joe as a mindless war toy;the symbol of American military adventurism; but th at’s not how it used to be.To the men and women who1 in World War II and the people they liberated;the GI.was the2 man grown into hero;the pool farm kid torn away from his home;the guy who3 all the burdens of battle;who slept in cold foxholes;who went without the4 of food and shelter;who stuck it out and drove back the Nazi reign of murder.this was not a volunteer soldier;not someone well paid;5 an average guy;up6 the best trained; best equipped; fiercest; most brutal enemies seen in centuries.His name is not much.GI. is just a military abbreviation7 Government Issue;and it was on all of the article 8 to soldiers.And Joe A common name for a guy who never9 it to the top.Joe Blow;Joe Magrac …a working class name.The United States has10 had a president or vicepresident or secretary of state Joe.GI.joe had a 11career fighting German; Japanese; and Korean troops. He appers as a character; or a 12 of american personalities; in the 1945 movie The Story of GI. Joe; based on the last days of war correspondent Ernie Pyle. Some of the soldiers Pyle13portrayde themselves in the film. Pyle was famous for covering the 14side of the warl; writing about the dirt-snow -and-mud soldiers; not how many miles were15or what towns were captured or liberated; His reports16the “willie” cartoons of famed Stars and Stripes artist Bill Maulden. Both men17the dirt and exhaustion of war; the 18of civilization that the soldiers shared with each other and the civilians: coffee; tobacco; whiskey; shelter; sleep. 19Egypt; France; and a dozen more countries; G.I. Joe was any American soldier;20the most important person in their lives.1. A performed Bserved Crebelled Dbetrayed2. A actual Bcommon Cspecial Dnormal3. Abore Bcased Cremoved Dloaded4. Anecessities Bfacilitice Ccommodities Dpropertoes5. Aand Bnor Cbut Dhence6. Afor Binto C form Dagainst。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
What Is a Good Image Segment?A Unified Approach to Segment ExtractionShai Bagon,Oren Boiman,and Michal IraniWeizmann Institute of Science,Rehovot,IsraelAbstract.There is a huge diversity of definitions of“visually meaning-ful”image segments,ranging from simple uniformly colored segments,textured segments,through symmetric patterns,and up to complex se-mantically meaningful objects.This diversity has led to a wide range ofdifferent approaches for image segmentation.In this paper we presenta single unified framework for addressing this problem–“Segmentationby Composition”.We define a good image segment as one which can beeasily composed using its own pieces,but is difficult to compose usingpieces from other parts of the image.This non-parametric approach cap-tures a large diversity of segment types,yet requires no pre-definition ormodelling of segment types,nor prior training.Based on this definition,we develop a segment extraction algorithm–i.e.,given a single point-of-interest,provide the“best”image segment containing that point.Thisinduces afigure-ground image segmentation,which applies to a rangeof different segmentation tasks:single image segmentation,simultaneousco-segmentation of several images,and class-based segmentations.1IntroductionOne of the most fundamental vision tasks is image segmentation;the attempt to group image pixels into visually meaningful segments.However,the notion of a “visually meaningful”image segment is quite complex.There is a huge diversity in possible definitions of what is a good image segment,as illustrated in Fig.1. In the simplest case,a uniform colored region may be a good image segment (e.g.,theflower in Fig.1.a).In other cases,a good segment might be a textured region(Fig.1.b,1.c)or semantically meaningful layers composed of disconnected regions(Fig.1.c)and all the way to complex objects(Fig.1.e,1.f).The diversity in segment types has led to a wide range of approaches for image segmentation:Algorithms for extracting uniformly colored regions(e.g., [1,2]),algorithms for extracting textured regions(e.g.,[3,4]),algorithm for ex-tracting regions with a distinct empirical color distribution(e.g.,[5,6,7]).Some algorithms employ symmetry cues for image segmentation(e.g.,[8]),while others use high-level semantic cues provided by object classes(i.e.,class-based segmen-tation,see[9,10,11]).Some algorithms are unsupervised(e.g.,[2]),while others require user interaction(e.g.,[7]).There are also variants in the segmentation Author names are ordered alphabetically due to equal contribution.D.Forsyth,P.Torr,and A.Zisserman(Eds.):ECCV2008,Part IV,LNCS5305,pp.30–44,2008.c Springer-Verlag Berlin Heidelberg2008What Is a Good Image Segment?31(a)(b)(c)(d)(e)(f) Fig.1.What is a good image segment?Examples of visually meaningful image segments.These vary from uniformly colored segments(a)through textured segments (b)-(c),symmetric segments(d),to semantically meaningful segments(e)-(f).These results were provided by our single unifiedframework.Fig.2.Segmentation by composition:A goodsegment S(e.g.,the butterfly or the dome)can be eas-ily composed of other regions in the segment.RegionsR1,R2are composed from other corresponding regionsin S(using transformations T1,T2respectively).Fig.3.Notations:Seg=S,S,∂Sdenotes afigure-ground segmentation.S is the foreground segment,S(its compliment)is thebackground,and∂S is theboundary of the segment.tasks,ranging from segmentation of a single input image,through simultaneous segmentation of a pair of images(“Cosegmentation”[12])or multiple images.The large diversity of image segment types has increased the urge to devise a unified segmentation approach.Tu et al.[13]provided such a unified probabilis-tic framework,which enables to“plug-in”a wide variety of parametric models capturing different segment types.While their framework elegantly unifies these parametric models,it is restricted to a predefined set of segment types,and each specific object/segment type(e.g.,faces,text,texture etc.)requires its own explicit parametric model.Moreover,adding a new parametric model to this framework requires a significant and careful algorithm re-design.In this paper we propose a single unified approach to define and extract visu-ally meaningful image segments,without any explicit modelling.Our approach defines a“good image segment”as one which is“easy to compose”(like a puzzle) using its own parts,yet it is difficult to compose it from other parts of the image (see Fig.2).We formulate our“Segmentation-by-Composition”approach,using32S.Bagon,O.Boiman,and M.Irania unified non-parametric score for segment quality.Our unified score captures a wide range of segment types:uniformly colored segments,through textured segments,and even complex objects.We further present a simple interactive segment extraction algorithm,which optimizes our score–i.e.,given a single point marked by the user,the algorithm extracts the“best”image segment con-taining that point.This in turn induces afigure-ground segmentation of the image.We provide results demonstrating the applicability of our score and al-gorithm to a diversity of segment types and segmentation tasks.The rest of this paper is organized as follows:In Sec.2we explain the basic concept behind our“Segmentation-by-Composition”approach for evaluating the visual quality of image segments.Sec.3provides the theoretical formulation of our unified segment quality score.We continue to describe ourfigure-ground segmentation algorithm in Sec.4.Experimental results are provided in Sec.5.2Basic Concept–“Segmentation By Composition”Examining the image segments of Fig.1,we note that good segments of signifi-cantly different types share a common property:Given any point within a good image segment,it is easy to compose(“describe”)its surrounding region using other chunks of the same segment(like a‘jigsaw puzzle’),whereas it is difficult to compose it using chunks from the remaining parts of the image.This is trivially true for uniformly colored and textured segments(Fig.1.a,1.b,1.c),since each portion of the segment(e.g.,the dome)can be easily synthesized using other portions of the same segment(the dome),but difficult to compose using chunks from the remaining parts of the image(the sky).The same property carries to more complex structured segments,such as the compound puffins segment in Fig.1.f.The surrounding region of each point in the puffin segment is easy to “describe”using portions of other puffins.The existence of several puffins in the image provides‘visual evidence’that the co-occurrence of different parts(orange beak,black neck,white body,etc.)is not coincidental,and all belong to a single compound segment.Similarly,one half of a complex symmetric object(e.g.,the butterfly of Fig.1.d,the man of Fig.1.e)can be easily composed using its other half,providing visual evidence that these parts go together.Moreover,the sim-pler the segment composition(i.e.,the larger the puzzle pieces),the higher the evidence that all these parts form together a single segment.Thus,the entire man of Fig.1.e forms a better single segment than his pants or shirt alone.The ease of describing(composing)an image in terms of pieces of another image was defined by[14],and used there in the context of image similarity. The pieces used for composition are structured image regions(as opposed to un-structured‘bags’/distributions of pointwise features/descriptors,e.g.,as in[5,7]). Those structured regions,of arbitrary shape and size,can undergo a global geo-metric transformation(e.g.,translation,rotation,scaling)with additional small local non-rigid deformations.We employ the composition framework of[14]for the purpose of image segmentation.We define a“good image segment”S as one that is easy to compose(non-trivially)using its own pieces,while difficult toWhat Is a Good Image Segment?33compose from the remaining parts of the image S =I \S .An “easy”composition consists of a few large image regions,whereas a “difficult”composition consists of many small fragments.A segment composition induces a description of the segment,with a corresponding “description length”.The easier the composition,the shorter the description length.The ease of composing S from its own pieces is formulated in Sec.3in terms of the description length DL (S |S ).This is con-trasted with the ease of composing S from pieces of the remaining image parts S ,which is captured by DL S |S .This gives rise to a “segment quality score”Score (S ),which is measured by the difference between these two description lengths:Score (S )=DL S |S −DL (S |S ).Our definition of a “good image segment”will maximize this difference in de-scription lengths.Any deviation from the optimal segment S will reduce this differ-ence,and accordingly decrease Score (S ).For example,the entire dome in Fig.1.b is an optimal image segment S ;it is easy to describe non-trivially in terms of its own pieces (see Fig.2),and difficult to describe in terms of the background sky.If,how-ever,we were to define the segment S to be only a smaller part of the dome,then thebackground S would contain the sky along with the parts of the dome excluded from S .Consequently,this would decrease DL S |S and therefore Score (S )would de-crease.It can be similarly shown that Score (S )would decrease if we were to define S which is larger than the dome and contains also parts of the sky.Note that unlike previous simplistic formulations of segment description length (e.g.,entropy of sim-ple color distributions [5]),our composition-based description length can capture also complex structured segments.A good figure-ground segmentation Seg = S,S,∂S (see Fig.3)partitions the image into a foreground segment S and a background segment S ,where at least one of these two segments (and hopefully both)is a ‘good image segment’according to the definition above.Moreover,we expect the segment boundary ∂S of a good figure-ground segmentation to coincide with meaningful image edges.Boiman and Irani [14]further employed the composition framework for coarse grouping of repeating patterns.Our work builds on top of [14],providing a gen-eral segment quality score and a corresponding image segmentation algorithm,which applies to a large diversity of segment types,and can be applied for vari-ous segmentation tasks.Although general,our unified segmentation framework does not require any pre-definition or modelling of segment types (in contrast to the unified framework of [13]).3Theoretical FormulationThe notion of ‘description by composition’was introduced by Boiman and Irani in [14],in the context of image similarity.They provided a similarity measure between a query image Q and a reference image Ref ,according to how easy it is to compose Q from pieces of Ref .Intuitively speaking,the larger those pieces are,the greater the similarity.Our paper builds on top of the basic compositional formulations of [14].To make our paper self-contained,we briefly review those basic formulations.34S.Bagon,O.Boiman,and M.IraniThe composition approach is formulated as a generative process by which the query image Q is generated as a composition of arbitrarily shaped pieces (regions)taken from the reference image Ref.Each such region from Ref can undergo a geometric transformation(e.g.,shift,scale,rotation,reflection)before being“copied”to Q in the composition process.The likelihood of an arbitrarily shaped region R⊂Q given a reference image Ref is therefore:p(R|Ref)=Tp(R|T,Ref)p(T|Ref)(1)where T is a geometric transformation from Ref to the location of R in Q. p(R|T,Ref)is determined by the degree of similarity of R to a region in Ref which is transformed by T to the location of R.This probability is marginal-ized over all possible transformations T using a prior over the transformations p(T|Ref),resulting in the‘frequency’of region R in Ref.Given a partition of Q into regions R1,...,R k(assumed i.i.d.given the partition),the likelihood that a query image Q is composed from Ref using this partition is defined by[14]:p(Q|Ref)=ki=1p(R i|Ref)(2)Because there are many possible partitions of Q into regions,the righthand side of(2)is marginalized over all possible partitions in[14].p(Q|Ref)/p(Q|H0)is the likelihood-ratio between the‘ease’of generating Q from Ref vs.the ease of generating Q using a“random process”H0(e.g., a default image distribution).Noting that the optimal(Shannon)description length of a random variable x is DL(x)≡−log p(x)[15],Boiman and Irani[14] defined their compositional similarity score as:log(p(Q|Ref)/p(Q|H0))= DL(Q|H0)−DL(Q|Ref)i.e.,the“savings”in the number of bits obtained by describing Q as composed from regions in Ref vs.the‘default’number of bits required to describe Q using H0.The larger the regions R i composing Q the higher the savings in description length.High savings in description length provide high statistical evidence for the similarity of Q to Ref.In order to avoid the computationally-intractable marginalization over all pos-sible query partitions,the following approximation was derived in[14]:DL(Q|H0)−DL(Q|Ref)≈i∈QPES(i|Ref)(3) where PES(i|Ref)is a pointwise measure(a Point-Evidence-Score)of a pixel i:PES(i|Ref)=maxR⊂Q,i∈R1|R|logp(R|Ref)p(R|H0)(4)Intuitively,given a region R,1|R|log(p(R|Ref)/p(R|H0))is the average savingsper pixel in the region R.Thus,PES(i|Ref)is the maximum possible savings per pixel for any region R containing the point i.We refer to the region which obtains this maximal value PES(i|Ref)as a‘maximal region’around i.The approximate computation of(4)can be done efficiently(see[14]for more details).What Is a Good Image Segment?353.1The Segment Quality ScoreA good segment S should be easy to compose from its own pieces using a non-trivial composition,yet difficult to compose from the rest of the image S (e.g.,Fig.2).Thus,we expect that for good segments,the description length DL S |Ref =S should be much larger than DL (S |Ref =S ).Accordingly,we define Score (S )=DL S |Ref =S −DL (S |Ref =S ).We use (2)to com-pute p (S |Ref )(the segment S taking the role of the query Q ),in order to define the likelihood and the description length of the segment S ,once w.r.t.to itself (Ref =S ),and once w.r.t.to the rest of the image (Ref =S ).We note that DL S |Ref =S =−log p S |Ref =S ,and DL (S |Ref =S )=−log p (S |Ref =S ).In order to avoid the trivial (identity)composition when composing S from its own pieces,we exclude transformations T from (1)that are close to the identity transformation (e.g.,when T is a pure shift,it should be of at least 15pixels.)Using the approximation of (3),we can rewrite Score (S ):Score (S )=DL S |Ref =S −DL (S |Ref =S )(5)=(DL (S |H 0)−DL (S |Ref =S ))− DL (S |H 0)−DL S |Ref =S ≈i ∈S PES (i |S )− i ∈S PES i |S = i ∈SPES (i |S )−PES i |S (6)Thus,Score (S )accumulates for every pixel i ∈S the term PES (i |S )−PES i |S ,which compares the ‘preference’(the pointwise evidence)of the pixel i to belong to the segment S ,relative to its ‘preference’to belong to S .3.2The Segmentation Quality ScoreA good figure-ground segmentation is such that at least one of its two segments,S or S ,is ‘a good image segment’(possibly both),and with a good segmenta-tion boundary ∂S (e.g.,coincides with strong image edges,is smooth,etc.)We therefore define a figure-ground segmentation quality score as:Score (Seg )=Score (S )+Score S +Score (∂S ),where Score (∂S )denotes the quality of the segmentation boundary ∂S .Using (6),Score (Seg )can be rewritten as:Score (Seg )=Score (S )+Score S +Score (∂S )(7)= i ∈S PES (i |S )−PES i |S + i ∈SPES i |S −PES (i |S ) +Score (∂S )The quality of the segmentation boundary,Score (∂S ),is defined as follows:Let P r (Edge i,j )be the probability of an edge between every two neighbor-ing pixels i,j (e.g.,computed using [16]).We define the likelihood of a seg-mentation boundary ∂S as:p (∂S )= i ∈S,j ∈S,(i,j )∈N P r (Edge i,j ),where N is the set of neighboring pixels.We define the score of the boundary ∂S by its ‘description length’,i.e.:Score (∂S )=DL (∂S )=−log p (∂S )=− i ∈S,j ∈S log P r (Edge i,j ).Fig.4shows quantitatively that Score (Seg )peaks at proper segment boundaries,and decreases when ∂S deviates from it.36S.Bagon,O.Boiman,and M.Irani(a)(b)Fig.4.Score (Seg )as a function of deviations in boundary position ∂S :(a)shows the segmentation score as a function of the boundary position.It obtains a maximum value at the edge between the two textures.(b)The segmentation score as a function of the deviation from the recovered segment boundary for various segment types (deviations were generated by shrinking and expanding the segment boundary).The above formulation can be easily extended to a quality score of a gen-eral segmentation of an image into m segments,S 1,...,S m :Score (Seg )= m i =1Score (S i )+Score (∂S ),s.t.∂S = m i =1∂S i .3.3An Information-Theoretic InterpretationWe next show that our segment quality score,Score (S ),has an interesting information-theoretic interpretation,which reduces in special sub-cases to com-monly used information-theoretic measures.Let us first examine the simple case where the composition of a segment S is restricted to degenerate one-pixel sized regions R i .In this case,p (R i |Ref =S )in (1)reduces to the frequency of the color of the pixel R i inside S (given by the color histogram of S ).Using (2)with one-pixel sized regions R i ,the description length DL (S |Ref =S )reduces to:DL (S |Ref =S )=−log p (S |Ref =S )=−logi ∈S p (R i |Ref =S )=−i ∈S log p (R i |Ref =S )=|S |·ˆH(S )where ˆH (S )is the empirical entropy 1of the regions {R i }composing S ,which is the color entropy of S in case of one-pixel sized R i .Similarly,DL S |Ref =S =− i ∈S log p R i |Ref =S =|S |·ˆH S,S ,where ˆH S,S is the empirical cross-entropy of regions R i ⊂S in S (which reduces to the color cross-entropy 1The empirical entropy of the sample x 1,..,x n is ˆH (x )=−1n i log p (x i )which approaches the statistical entropy H (x )as n →∞.What Is a Good Image Segment?37 in case of one-pixel sized R i).Using these observations,Score(S)of(5)reduces to the empirical KL divergence between the region distributions of S and S:Score(S)=DLS|S−DL(S|S)=|S|·ˆHS,S−ˆH(S)=|S|·KLS,SIn the case of single-pixel-sized regions R i,this reduces to the KL divergence between the color distributions of S and S.A similar derivation can be applied to the general case of composing S from arbitrarily shaped regions R i.In that case,p(R i|Ref)of(1)is the frequency of regions R i⊂S in Ref=S or in Ref=S(estimated non-parametrically using region composition).This gives rise to an interpretation of the description length DL(S|Ref)as a Shannon entropy measure,and our segment quality score Score(S)of(5)can be interpreted as a KL divergence between the statistical distributions of regions(of arbitrary shape and size)in S and in S.Note that in the degenerate case when the regions R i⊂S are one-pixel sized, our framework reduces to a formulation closely related to that of GrabCut[7] (i.e.,figure-ground segmentation into segments of distinct color distributions). However,our general formulation employs regions of arbitrary shapes and sizes, giving rise tofigure-ground segmentation with distinct region distributions.This is essential when S and S share similar color distributions(first order statistics), and vary only in their structural patterns(i.e.,higher order statistics).Such an example can be found in Fig.5which compares our results to that of GrabCut.3.4The Geometric Transformations TThe family of geometric transformations T applied to regions R in the compo-sition process(Eq.1)determines the degree of complexity of segments that can be handled by our approach.For instance,if we restrict T to pure translations, then a segment S may be composed by shuffling and combining pieces from Ref.Introducing scaling/rotation/affine transformations enables more complex compositions(e.g.,compose a small object from a large one,etc.)Further in-cluding reflection transformations enables composing one half of a symmetric object/pattern from its other half.Note that different regions R i⊂S are‘gen-erated’from Ref using different transformations T bining several types of transformations can give rise to composition of very complex objects S from their own sub-regions(e.g.,partially symmetric object as in Fig.10.b).4Figure-Ground Segmentation AlgorithmIn this section we outline ourfigure-ground segmentation algorithm,which op-timizes Score(Seg)of(7).The goal offigure-ground segmentation is to extract an object of interest(the“foreground”)from the remaining parts of the image (the“background”).In general,when the image contains multiple objects,a user input is required to specify the“foreground”object of interest.38S.Bagon,O.Boiman,and M.IraniInput Our results Results of GrabCut[7] image Init+recovered S Init bounding box recovered SFig.5.Our result vs.GrabCut[7].GrabCut fails to segment the butterfly(fore-ground)due to the similar colors of theflowers in the ing composition with arbitrarily shaped regions,our algorithm accurately segments the butterfly.We used the GrabCut implementation of /∼mohitg/segmentation.htm Differentfigure-ground segmentation algorithms require different amounts of user-input to specify the foreground object,whether in the form of fore-ground/background scribbles(e.g.,[6]),or a bounding-box containing the fore-ground object(e.g.,[7]).In contrast,ourfigure-ground segmentation algorithm requires a minimal amount of user input–a single user-marked point on the foreground segment/object of interest.Our algorithm proceeds to extract the “best”possible image segment containing that point.In other words,the algo-rithm recovers afigure-ground segmentation Seg=S,S,∂Ss.t.S contains the user-marked point,and Seg maximizes the segmentation score of(7).Fig.6 shows how different user-selected points-of-interest extract different objects of interest from the image(inducing differentfigure-ground segmentations Seg).Afigure-ground segmentation can be described by assigning a label l i to every pixel i in the image,where l i=1∀i∈S,and l i=−1∀i∈S.We can rewrite Score(Seg)of(7)in terms of these labels:Score(Seg)=i∈Il i·PES(i|S)−PESi|S+12(i,j)∈N|l i−l j|·log P r(Edge i,j)(8) where N is the set of all pairs of neighboring pixels.Maximizing(8)is equiv-alent to an energy minimization formulation which can be optimized using a MinCut algorithm[17],wherePES(i|S)−PESi|Sform the data term,and log P r(Edge i,j)is the“smoothness”term.However,the data term has a com-plicated dependency on the segmentation into S,S,via the terms PES(i|S)and PESi|S.This prevents straightforward application of MinCut.To overcome this problem,we employ EM-like iterations,i.e.,alternating between estimating the data term and maximizing Score(Seg)using MinCut(see Sec.4.1).In our current implementation the“smoothness”term P r(Edge i,j),is com-puted based on the edge probabilities of[16],which incorporates texture,lumi-nance and color cues.The computation of PES(i|Ref)for every pixel i(whereWhat Is a Good Image Segment?39Input image Extracted S (red)around user selected points (green)Fig.6.Different input points result in different foreground segmentsRef is either S or S )involves finding a ‘maximal region’R surrounding i which has similar regions elsewhere in Ref ,i.e.,a region R that maximizes (4).An image region R (of any shape or size)is represented by a dense and structured ‘ensemble of patch descriptors’using a star-graph model.When searching for a similar region,we search for a similar ensemble of patches (similar both in their patch descriptors,as well as in their relative geometric positions),up to a global transformation T (Sec.3.4)and small local non-rigid deformations (see [18]).We find these ‘maximal regions’R using the efficient region-growing algorithm of [18,14]:Starting with a small surrounding region around a pixel i ,we search for similar such small regions in Ref .These few matched regions form seeds for the region growing algorithm.The initial region around i with its matching seed regions are simultaneously grown (in a greedy fashion)to find maximal matching regions (to maximize PES (i |Ref )).For more details see [18,14].4.1Iterative OptimizationInitialization.The input to our segment extraction algorithm is an image and a single user-marked point of interest q .We use the region composition procedure to generate maximal regions for points in the vicinity of q .We keep only the maximal regions that contain q and have high evidence (i.e.,PES)scores.The(a)(b)(c)(d)(e)(f)Input Image Input point Score=418Score=622Score=767SSFig.7.Progress of the iterative process:Sequence of intermediate segmentations of the iterative process.(a)The input image.(b)The user marked point-of-interest.(c)Initialization of S .(d)S after 22iterations.(e)Final segment S after 48iterations.(f)The resulting figure-ground segments,S and S .The iterations converged accurately to the requested segment after 48iterations.Input image pair Our cosegmentation Cosegmentation of [12]Fig.8.Cosegmentation of image pair :Comparing our result to that of [12]union of these regions,along with their corresponding reference regions,is used as a crude initialization,S 0,of the segment S (see Fig.7.c for an example).Iterations.Our optimization algorithm employs EM-like iterations:In each it-eration we first fix the current segmentation Seg = S,S,∂S and compute the data term by re-estimating PES (i |S )and PES i |S .Then,we fix the data term and maximize Score (Seg )using MinCut [17]on (8).This process is iterated until convergence (i.e.,when Score (Seg )ceases to improve).The iterative pro-cess is quite robust –even a crude initialization suffices for proper convergence.For computational efficiency,in each iteration t we recompute PES (i |Ref )and relabel pixels only for pixels i within a narrow working band around the current boundary ∂S t .The segment boundary recovered in the next iteration,∂S t +1,is restricted to pass inside that working band.The size of the working band is ∼10%of the image width,which restricts the computational complexity,yet enables significant updates of the segment boundary in each iteration.Input image4class images Init point+recovered SegFig.9.Class-based Segmentation:Segmenting a complex horse image(left)using 4unsegmented example images of horsesDuring the iterative process,similar regions may have conflicting labels.Due to the EM-like iterations,such regions may simultaneouslyflip their labels,and fail to converge(since each such region provides“evidence”for the other toflip its label).Therefore,in each iteration,we perform two types of steps successively: (i)an“expansion”step,in which only background pixels in S t are allowed toflip their label to foreground pixels.(ii)a“shrinking”step,in which only foreground pixels in S t are allowed toflip their label to background pixels.Fig.7shows a few steps in the iterative process,from initialization to convergence.4.2Integrating Several Descriptor TypesThe composition process computes similarity of image regions,using local descrip-tors densely computed within the regions.To allow forflexibility,our framework integrates several descriptor-types,each handles a different aspect of similarity be-tween image points(e.g.,color,texture).Thus,several descriptor types can collab-orate to describe a complex segment(e.g.,in a“multi-person”segment,the color descriptor is dominant in the face regions,while the shape descriptor may be more dominant in other parts of the body).Although descriptor types are very differ-ent,the‘savings’in description length obtained by each descriptor type are all in the same units(i.e.,bits).Therefore,we can integrate different descriptor-types by simply adding their savings.A descriptor type that is useful for describing a region will increase the savings in description length,while non-useful descriptor types will save nothing.We used the following descriptor types:(1)SIFT(2) Color:based on a color histogram(3)Texture:based on a texton histogram(4) Shape:An extension of Shape Context descriptor of Belongie et al.(5)The Self Similarity descriptor of Shechtman and Irani.5ResultsWe applied our segment extraction algorithm to a variety of segment types and segmentation tasks,using images from several segmentation databases[19,20,7]. In each case,a single point-of-interest was marked(a green cross in thefig-ures).The algorithm extracted the“best”image segment containing that point。