第2章 单自由度系统的振动(2).
机械振动学_第二章单自由度振动系统

第二章单自由度系统振动§1-1 概述单自由度系统的振动理论是振动理论的理论基础。
(1)尽管实际的机械都是弹性体或多自由度系统,然而要掌握多自由度振动的基本规律,就必须先掌握单自由度系统的振动理论。
此外,(2)许多工程技术上的具体振动系统在一定条件下,也可以简化为单自由度振动系统来研究。
[举例如下:]例如:(1)悬臂锤削镗杆;(2)外圆磨床的砂轮主轴;(3)安装在地上的床身等。
[力学模型的简化方法]若忽略这些零部件中的镗杆、主轴和转轴的质量,只考虑它们的弹性。
忽略那些支承在弹性元件上的镗刀头、砂轮、床身等惯性元件的弹性,只考虑它们的惯性。
把它们看成是只有惯性而无弹性的集中质点。
于是,实际的机械系统近似地简化为单自由度线性振动系统的动力学模型。
在实际的振动系统中必然存在着各种阻尼,故模型中用一个阻尼器来表示。
阻尼器由一个油缸和活塞、油液组成。
汽车轮悬置系统等等。
[以上为工程实际中的振动系统]单自由度振动系统——指用一个独立参量便可确定系统位置的振动系统。
所有的单自由度振动系统经过简化,都可以抽象成单振子,即将系统中全部起作用的质量都认为集中到质点上,这个质点的质量m 称为当量质量,所有的弹性都集中到弹簧中,这个弹簧刚度k称为当量弹簧刚度。
以后讨论中,质量就是指当量质量,刚度就是指当量弹簧刚度。
在单自由度振动系统中,质量m、弹簧刚度k、阻尼系数C是振动系统的三个基本要素。
有时在振动系统中还作用有一个持续作用的激振力P。
应用牛顿运动定律,作用于一个质点上所有力的合力等于该质点的质量和该合力方向的加速度的乘积。
(牛顿运动定律)(达伦培尔原理)现取所有与坐标x 方向一致的力、速度和加速度为正,则:kx x C t P xm --= ωsin 0 (牛顿运动定律) (达伦培尔原理:在一个振动体上的所有各力的合力必等于零) (动静法分析:作用在振动体上的外力与设想加在此振动体上的惯性力组成平衡力系)上式经整理得,t P kx x C xm ωsin 0=++ (2.1) 该式就是单自由度线性振动系统的运动微分方程式的普遍式。
2单自由度系统振动2
(2)振动特性的讨论
①受迫振动的运动规律
x Bsint
②受迫振动的频率
1 2
2 2
B0
sint
2
受迫振动的频率与激振力的频率 ③受迫振动的振幅 1)初始条件的影响: 2)激振力幅 的影响
相同
3)激振力频率 及振动系统固有频率
的影响
图2.23 幅频响应曲线
1
2
cos
nt
1
2
nt
sin
1
2
nt
e
1
cos
2
1
2
nt
B 0
式中 B0 P0 ; k
tg 1 1
1
e nt
1
2
2
; cos
1 t
kk m C imC a k m C
2 2 2 2 2 2 2
3
Ba
k2 C22 a 2 2 2 2 km C
2 12 2 2 1 2 2
mC2 2 2 tg 2 2 2 k km C 12 2 1 2 2 B a 1 2 2 2 2
k m
n
【例2-10】如图2.26所示为一无重刚杆。其一端铰支,距铰支端 处有一质量为 的质点,距 处有一阻尼器,其阻力系数为C, 距 处有一刚度系数为 的弹簧,并作用一简谐激振力 。刚杆在水平位置平衡,试列出系统的振动微分方程,并求振 动系统的固有频率 ,以及当激振力频率 等于 时质点 的振幅。
1cosnt
h t
1
第二章 单自由度系统的自由振动

k
I
在圆盘的静平衡位置上任意选一根半径作 为角位移的起点位置
由牛顿第二定律:
I&& k 0
&& 02 0
扭振固有频率
0
k I
第二章 单自由度系统的自由振动
由上例可看出,除了选择了坐标不同之外,角振动与直线振动的数学描述 完全相同。如果在弹簧质量系统中将 m、k 称为广义质量及广义刚度,则弹 簧质量系统的有关结论完全适用于角振动。以后不加特别声明时,弹簧质 量系统是广义的 。
对时间求导 取平衡位置为势能零点,根据自由振动的特点,系统在平衡位置时,系统的势能 为零,其动能的极大值就是全部机械能;而在振动系统的极端位置时,系统的动 能为零,其势能的极大值等于全部的机械能,即有:
例题讲解3 均匀悬臂梁长为 l, 弯曲刚度为EJ,重量不计, 自由端附有重为P=mg的物体,如图所示。试 写出物体的振动微分方程,并求出频率。 梁的自由端将有静挠度: 物体的振动微分方程为:
8
第二章 单自由度系统的自由振动
例题讲解3 重物落下,与简支梁做完全非弹性碰撞
梁长 L,抗弯刚度 EJ m
h
第二章 单自由度系统的自由振动
2.1 简谐振动
由牛顿定律,有 设系统固有频率为 二阶常系数线性齐次常微分方程
通解形式为
1
第二章 单自由度系统的自由振动
根据三角关系式
改 写
由此可以知道:该系统以 固有频率作简谐振动。
振动周期:
振动频率:
2
第二章 单自由度系统的自由振动
设在初始时刻t=0,物体有初位移
弹簧原长位置
m&x& kx 0
第二章(第2,3节)单自由度系统的自由振动

2
R r 2 2
圆柱体的势能为相对于最低位置O的重力势能。 若选圆柱体中心C在运动过程中的最低点为零势能 点,则系统的势能为 2 U W ( R r )( 1 cos ) 2W ( R r ) sin
2
2.2 能量法
例题:用能量法求解系统的振动微分方程与固有频率(例2.2-1)
2.2 能量法
例题:用能量法求解系统的振动微分方程与固有频率(例2.2-1)
例2.2-1 有一个重量为W,半径为r的实心圆柱体, 在半径为R的圆柱形面上无滑动地滚动,如图2.2-1所示。 假设该滚动的圆柱体进行简谐运动,试求它绕平衡位置作 微小摆动时的固有频率n。 解:圆柱体在摆动时 有两种运动:移动和滚动。 设坐标如图2.2-1示。 摆动时圆柱体中心C点的速度 及圆柱体的角速度分别为
1 k 1 k1 1 k2 1 kn
图 2.3-2
k
i 1
n
1
i
(2.3-2)
2.3 等效刚度系数
串、并联弹簧的等效刚度的计算
图2.3-2(b)是两个并联弹簧,刚度系 数分别为k1和k2。两个弹簧所受的力分别 为k1xB、k2xB 根据静力平衡条件得: F k 1 x B k 2 x B
2.3 等效刚度系数
串、并联弹簧的等效刚度的计算
图2.3-2(a)是两个串联弹簧,刚度系数分 别为k1和k2。B点的位移及等效刚度系数为
xB F k1 F k2
k
F xB
k1k 2 k1 k 2
串联弹簧的作用使系统中的弹簧刚度降低。
如果有n个弹簧串联,刚度系数分别为k1, k2, …, kn,则等效刚度系数k应满足关系式
02单自由度系统的振动

ka 2 ( o ) mgl ml 2
k o a a mgl 0
l
mg
A
知识要点: 线弹性 恢复力作用下单自由度无阻尼自由振动微分方程是: 2 n x x0
(1) 振动方程的解为:
nt x A sin
如果振系中质量块的重力与弹簧静伸长力产生力矢平 衡或力矩平衡时, 以静平衡位置作为坐标原点而建立 的振动方程中不会出现重力项.
2 n 2. 方程 x x 0 的解
用特征根法 方程的解
2 2 n 0
in
A1
2 A12 A2
x A1 cos n t A2 si n n t
16/96
注意: 如果系统在振动方向上受到某个常力的作用(如重力),该常 力只影响静平衡点o的位置,而不影响系统的振动规律,如振动频 率、振幅和相位等。所以, 以静平衡点为坐标原点的振动方程是标 准方程.
k
k
a
O
a
st
O
O
l
mg A l
k A
mg
x k x0 m
A
x
ka2 2 0 ml
(3)周期T 和固有频率 n 仅决定于系统本身的固有参数 . (如: m、 k、J 等 )。 此外, 如果系统在振动方向上受到某个常力的作用,该常力
只影响静平衡点O的位置,而不影响系统的振动规律,如振动
频率、振幅和相位等。
10/96
例1. 一弹簧振子的物块重量为P, 已知在静力平衡时, 弹簧的伸 长为st . 试写出系统的振动方程.
2 x0
2 n
2 0 x
《结构动力学 》单自由度体系的振动
ky 0........( m y a)
m k (D’Alember’s principle) y( t )
y( t )
k
m
my
..
my
..
y m ..
ky
my
15
§2.2 无阻尼自由振动
b、柔度法(flexibility method) 取振动体系为研究对象, 惯性力:
1)由地震引起建筑物基础的运动; 2)由建筑物的振动而引起安置在建筑物内的设备 基底的运动等等。
10
§2.1运动方程的建立
1、地震动问题的简化模型
假定:
(1)刚架内水平横梁是刚 性的,且包含了结构所有 的运动质量, (2)柱假定无重量且在 轴向不能变形,抵抗刚架 侧向位移的恢复力由两根 柱的侧向刚度来提供。
y(t T ) y(t 2 / ) y(t )
T 2 /
T:自由振动的周期,单位为秒(s)。
f 1 / T :频率,表示单位时间内的振动次数,单位为
1/秒(1/s),或称为赫兹(Hz)。
2f :圆频率或角频率,表示在2 个单位时间内 的振动次数,单位为rad/s 。
①单自由度体系包括振动分析中涉及到的所有物理量和基本 概念。
②具有实际应用价值,或进行初步的估算。 很多实际动力问题可按单自由度体系计算。 ③多自由度体系动力分析的基础。
3
§2.1运动方程的建立
1、水平振动
作用在质量块上有三个真实力、一个虚拟的力: 荷载、弹簧弹性力 和阻尼力; 惯性力
§2.1运动方程的建立
m l/2 解:1)求δ
第2章:单自由度系统的振动

运动方程 :
k 0 I 0 T
(2.1.13)
第2章 单自由度系统的振动
例2.1.3 图示水塔,水箱的总质 量为M,抗弯刚度和单位长度的 质量分别为EI(x)和m(x) ,塔受 水平分布荷载 q(x, t)的作用, 试建立系统的运动方程。 如何将无限自由度问题简 问题 : 化为单自由度问题? 解:设描述塔身弯曲变形的形状函数 为φ (x),将塔的弯曲变形表示为
l l Wnc 0 q( x, t ) y( x, t ) dx 0 q( x, t ) ( x) Ydx
y " 2 y / x 2 Wnc为非保守力,即外荷载所做的功 。
t1 哈密顿原理 : T V dt t0 Wnc dt 0 t1 t0
第2章 单自由度系统的振动
A
m
l/4
B
C
M
l/4
k
l/4
D F (t ) m / 2 c E
l/4
图2.1.2 以转角θ 为广义坐标的单自由度系统
l 2 3l 2 1 WI I m 4 2 m 4 I 11 l 2 m 32
C2e
j 1 2 t
(2.2.19)
d 1 2
x(t ) e t ( A1 cosd t A2 sin d t ) Ae t sin d t (2.2.20)
第2章 单自由度系统的振动
x(0) x0 (0) x 0 x
第2章 单自由度系统的振动
虚功原理: WP WI WD WS 0 整理得:
M
1 2
振动理论及工程应用2 第二章 单自由度系统的振动
刚度系数k。
先将刚度系数k2换算至质量m所在处C的等效刚度系数k。
设在C处作用一力F,按静力平衡的
关系,作用在B处的力为 Fa
C
b
此力使B 弹簧 k2 产生 变形,
而此变形使C点发生的变形为
c
a Fa 2 b k2b2
得到作用在C处而与k2弹簧等效的刚度系数
k F
c
k2
C1 x0
C2
v0 pn
x
x0
cos
pnt
v0 pn
sin
pnt
另一种形式
x Asin( pnt )
初
振幅
相 两种形式描述的物
A
x02
(
v0 pn
)2
位 块振动,称为无阻 角 尼自由振动,简称
自由振动。
arctg(
pn x0 v0
)
无阻尼的自由振动是以其静平衡位置为振动中心的 简谐振动
b2 a2
k F
c
k2
b2 a2
与弹簧k1串联
C
得系统的等效刚度系数
k
k1k 2
b2 a2
k1k 2 b 2
k1
k2
b2 a2
a 2k1 b2k2
物块的自由振动频率为
pn
k b
k1k2
m
m(a2k1 b2k2 )
弹性梁的等效刚度
例 一个质量为m的物块从 h 的高 处自由落下,与一根抗弯刚度为EI、 长为的简支梁作塑性碰撞,不计梁 的质量,求该系统自由振动的频率、 振幅和最大挠度。
系统振动的周期 T 2π 2π m
结构动力学第二章 单自由度系统的振动2
0.39 0.66 0.73 1.00 1.05 1.20 1.42 1.55 1.69 1.76 2.00
23
24
解: 水塔的自振频率和周期分别为
k 29.4106 N / m 31.305rad / s
m
30103 kg
T 2 0.2007s
取微小时段 0.01s ,约相当于水塔自振
同理,积分项 B(t) 可用相同的方法进行计算。
16
因此,无阻尼体系动力响应的数值解: y(t) A(t) sin t B(t) cost
同理,也可求得有阻尼体系动力响应。 注:数值积分解答的精确度与计算中选择和微 小时段 有关,一般可取小于系统自振周期 的十分之一,便可得到较好的结果。
17
A yst
1
2
t1
2
( 1 cost1
) 2
t1
1/ 2
sint1
t1 T
0.371
动力系数只与 t1 有关,即只与 t1 T 有关
下表列出不同 t1 T 值时的动力系数。
表 不同 t1 T 值时的动力系数表
t1/T 0.125 0.20 0.25 0.371 0.40 0.50 0.75 1.00 1.50 2.00
用下式进行计算。
无阻尼:
( 0)
y(t) 1 t p( ) sin (t )d
m 0
有阻尼: y(t) 1
( 0)
md
t 0
p(
)e (t )
sin d
(t
)d
2)对于许多实际情况,如果荷载的变化规律是 用一系列离散数据表示(如试验数据),此时 的响应计算就必须借助于数值分析方法。
11
第二章 单自由度系统的振动(课件)
无阻尼
有阻尼
力 学 模 型
数 学 模 型
由初始条件 t=0时 决定
第二章 单自由度系统的振动
减幅系数 对数系数
临界阻尼
第二章 单自由度系统的振动
响 应
实验
x-t曲线
第二章 单自由度系统的振动
,系
(一周期内阻尼力所做的功)
当激励力为
第二章 单自由度系统的振动
系统做简谐强迫振动,有
等效粘性阻尼系数
第二章 单自由度系统的振动
AR --实际的阻力R在一个周期里所消耗的能量
例2-9 干摩擦阻尼 等效粘性阻尼
第二章 单自由度系统的振动
特点: F为常力,大小不
变,方向改变。
共四个过程都是消耗能量
说明结构材料实际上不是完全弹 性的,在振动过程中也就是处在 加载卸载过程中,每一个振动周 期引成一次滞后曲线,从而产生 结构振动。由实验知,对大多数 金属而言,结构阻尼在一周期内 所消耗的能量与振动的振幅平方 成正比,而且在很大一个频率范 围内与频率无关。
第二章 单自由度系统的振动
§2-3 单自由度系统的自由振动
摩擦力所做的功(1/4周期)
全过程摩擦力所做的功(1周 期)
第二章 单自由度系统的振动
例2-10 流体阻尼 特点:当物体以较大的速度在粘性较小的流体中运动时,其阻 尼为 其在1周期内所做的功
例2-11 结构阻尼
滞
加载
后
回
线 卸载
双向 应变幅值
在一周期内:
第二章 单自由度系统的振动
由于材料本身内摩擦造成的阻尼。 阴影面积表示了材料在一循环中 单位体积释放的能量(热能)
二、等效刚度
(1)弹簧并联
第二章 单自由度系统的振动
第二章 单自由度体系的振动 (2)经典.ppt

.......... .(c)
my(t) y 0
I(t)
1
可得与 (b) 相同的方程
k
刚度法常用于刚架类结构,柔度法常用于梁式结构。
2.1.2 单自由度体系自由振动微分方程解答
my ky 0 .......... .......... .......... ......( b)
改写为 y k y 0 m
( 2 2 ) Asint F sint
m
y
F
m( 2 2 )
sin t
特解:y Asint
A
F
m( 2 2 )
方程通解:
y
C1
sin t
C2
cos t
F
m(2
2)
sin t
Page 24
其中:C1、C2 由初始条件确定,若: y(0) 0, y(0) 0
C1
F m(2
2 )
这条曲线仍具有衰减性, 但不具有波动性。
t
1 临界阻尼常数为: cr 2m (3) 1 (超阻尼)
临界阻尼比为: c
cr
体系不出现振动,很少遇到,不予讨论。
y0
Page 21
2.2单自由度体系的强迫振动
2.2.1 单自由度体系强迫振动微分方程的建立 2.2.2 简谐荷载作用下结构的动力反应 2.2.3 一般荷载作用下结构的动力反应 2.2.4 阻尼对受简谐荷载强迫振动的影响 2.2.5 有阻尼时的杜哈梅积分
它表示合成运动仍是一个简谐运动。其中A和可由下式确定
振幅 相位角
A
y2
v
2
. . . . . . . . .... . . . . . . .... . . . . . . . (g )
西南交通大学振动力学_第 2 章(II) 单自由度系统的强迫振动
F0 0 (sin t sin t ) 0 2 k (1 )
(2 48)
可见:1)强迫振动即使在初位移和初速度均为零,在
激振力作用下仍存在着瞬态响应,即上式等号右端括号
中的第二项,在有阻尼的情况下,此项数值将逐渐趋向 于零。 2 )当系统的固有频率比较低时,瞬态振动振幅 就可能比较大,而且在较长时间内不易衰减下去。 3 )因此实验中测定强迫振动振幅时,应该在经 过一段时间稳定以后再测量,否则可能测到的是两部分
《振动力学》
自由振动
B
F0 / k
(1 2 ) 2 (2 ) 2
0 x 0 2 x 0 2 ) x 18 ' ' x0 arctan 0 x0 x A (
单自由度系统的振动 d) 激振力频率0等于或接近于自由振动频率情形 引入ω –ω0 =2ε 考虑式(2-48),当 ε 很小时,则 F sin t x 0 cos t (2 50) 2 m 式(2-50)中ε很小,sinεt变化缓慢,周期2π/ε很大。式(2-50) 可看成周期为 2π/、可变振幅等于 ( F0 / 2 m )sin t 的振动。这种现 象称为拍,按图2-32中规律变化。拍的周期为π/ ε。
F0 sin 0t x(t ) A sin(t ) k 1 2 (2 47)
0 ,代入初始条件得 设t=0时,x 0, x
F0 0 A , 0 k (1 2 )
图 2-31
《振动力学》
16
单自由度系统的振动
代入(2-47)得
x(t )
当阻尼大时,带宽就宽,过共振时振幅变化平缓,振幅较小;反之, 阻尼小时,带宽就窄,过共振时振幅变化较陡,振幅就大。所以品质因子 反映了系统阻尼强弱性质和共振峰的陡峭程度。在机械系统中,为了过共 振时比较平稳,希望 Q值小些。式(2-45)提供了由试验估算系统阻尼比 的方法。 半功率点q1和q2 处的相位角由式(2-40) 估算如下: 21 2 (1 ) tan 1 1 2 2 1 1 1 (1 )
第2章 单自由度系统的自由振动
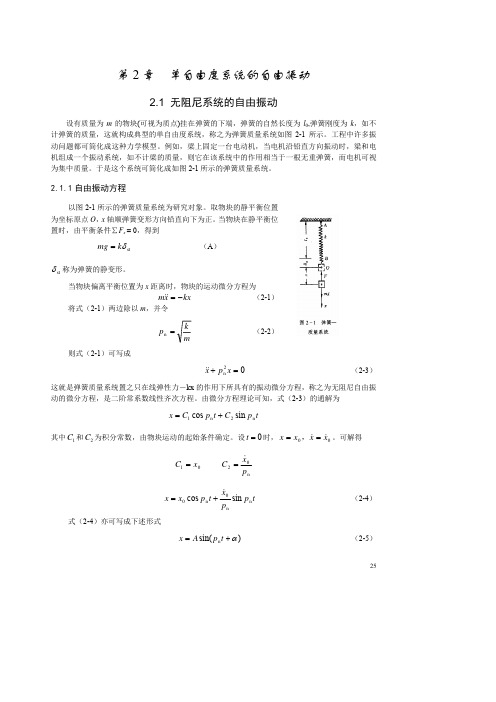
25第2章 单自由度系统的自由振动2.1 无阻尼系统的自由振动设有质量为m 的物块(可视为质点)挂在弹簧的下端,弹簧的自然长度为l 0,弹簧刚度为k ,如不计弹簧的质量,这就构成典型的单自由度系统,称之为弹簧质量系统如图2-1所示。
工程中许多振动问题都可简化成这种力学模型。
例如,梁上固定一台电动机,当电机沿铅直方向振动时,梁和电机组成一个振动系统,如不计梁的质量,则它在该系统中的作用相当于一根无重弹簧,而电机可视为集中质量。
于是这个系统可简化成如图2-1所示的弹簧质量系统。
2.1.1自由振动方程以图2-1所示的弹簧质量系统为研究对象。
取物块的静平衡位置为坐标原点O ,x 轴顺弹簧变形方向铅直向下为正。
当物块在静平衡位置时,由平衡条件∑F x = 0,得到st δk mg = (A )st δ称为弹簧的静变形。
当物块偏离平衡位置为x 距离时,物块的运动微分方程为mxkx &&=− (2-1) 将式(2-1)两边除以m ,并令mkp =n (2-2) 则式(2-1)可写成02n =+x p x && (2-3)这就是弹簧质量系统置之只在线弹性力-kx 的作用下所具有的振动微分方程,称之为无阻尼自由振动的微分方程,是二阶常系数线性齐次方程。
由微分方程理论可知,式(2-3)的通解为t p C t p C x n 2n 1sin cos +=其中C 1和C 2为积分常数,由物块运动的起始条件确定。
设0=t 时,x x xx ==00,&&。
可解得 C x 10= n02p xC &=t p p xt p x x n n0n 0sin cos &+= (2-4) 式(2-4)亦可写成下述形式)sin(n α+=t p A x (2-5)26 其中⎪⎪⎩⎪⎪⎨⎧=+=)arctan()(00n 2n020x x p p x x A &&α (2-6) 式(2-4)、(2-5)是物块振动方程的两种形式,称为无阻尼自由振动,简称自由振动。
第二章 单自由度系统的振动_part2

Dr.Hongmei Xu
1 2 2 B2 2 2 ml max ml 0 2 2 1 k (a max ) 2 mgl(1 cos max ) 2
Page 15
College of Engineering, Huazhong Agriculture University
机械振动基础
2.2.2 固有频率的求法
a. 根据定义
2 m kx 0 0 x 0 x x
振系的固有频率为:
k 1 0 f m 2
k m
Dr.Hongmei Xu
College of Engineering, Huazhong Agriculture University
B2 2 2 B2 根据Tmax =Umax,可得 ml 0 ( ka2 mgl ) 2 2
ka2 mgl g ka2 2 0 2 mgl 1 ml l
ω0 g ka2 mgl 1 l
Page 16
Dr.Hongmei Xu
Huazhong Agriculture University
华中农业大学
Foundation of Mechanical Vibration
机械振动基础
2.2.1 无阻尼自由振动
k 2 令 ,则方程成为 0 x 0 x m
2 0
设解的形式为 x e st
则
2 s 2 0 0
Huazhong Agriculture University
华中农业大学
Foundation of Mechanical Vibration
第二章单自由度系统的自由振动
瑞利法计算系统的固有频率时, 必须先假定 瑞利法计算系统的固有频率时 , 必须先 假定 系统弹性元件的振型 振型. 系统弹性元件的振型. 假定的振型通常与真实振型存在着差异, 假定的振型通常与真实振型存在着差异 , 这相 当于对系统附加了某些约束 附加了某些约束, 当于对系统附加了某些约束,因而增加了系统的刚 使得求出的固有频率略高出精确值. 度,使得求出的固有频率略高出精确值. 假定的振型越接近于真实振型, 假定的振型越接近于真实振型 , 瑞利法算出 的固有频率就越精确. 的固有频率就越精确. 实践证明, 实践证明 , 以系统的静变形曲线作为假设振 所得结果精度较高. 型,所得结果精度较高.
由平行轴定理
2
复摆的振动
2
gT I c = I 0 ma = ma 1 2 4aπ
2
2
测振仪, 例2-4 测振仪,已知
试建立该系统的运动微分方程, 试建立该系统的运动微分方程, 并求系统的固有频率. 并求系统的固有频率. 解:单自由度系统 取 θ 为广义坐标
m, I , k1 , k 2 , a, b
= C1 cos ω n t + C 2 sin ω n t
x = A sin(ω n t + ) 简谐振动
2 1 2 2
A= C +C
C1 , = arctg C2
初相位: 初相位:
质量弹簧系统
为任意常数,由初始条件确定. 式中 C1 , C 2 或A, 为任意常数,由初始条件确定. 相位: 相位: (ω n t 振幅: 振幅:A
1 1 2 1 1 2 2 2 2 2 2 L = ma θ + Iθ k1a θ k 2 b θ 2 2 2 2
§2.3 固有频率的计算
振动理论习题答案汇总
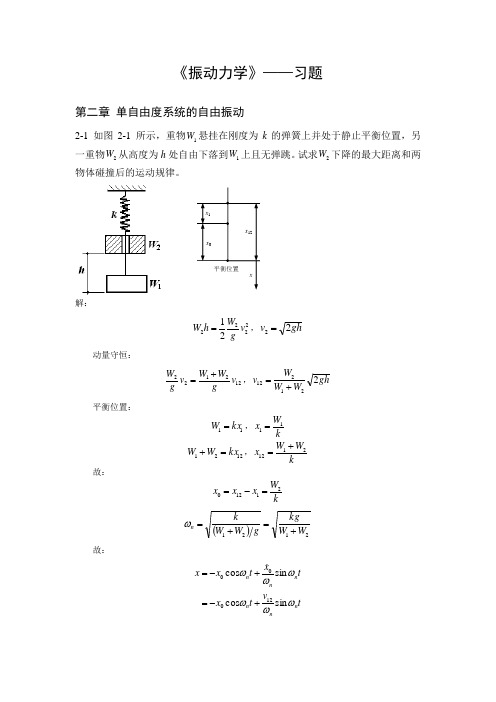
《振动力学》——习题第二章 单自由度系统的自由振动2-1 如图2-1 所示,重物1W 悬挂在刚度为k 的弹簧上并处于静止平衡位置,另一重物2W 从高度为h 处自由下落到1W 上且无弹跳。
试求2W 下降的最大距离和两物体碰撞后的运动规律。
解:222221v gW h W =,gh v 22=动量守恒:122122v gW W v g W +=,gh W W W v 221212+=平衡位置:11kx W =,kW x 11=1221kx W W =+,kW W x 2112+=故:kW x x x 21120=-= ()2121W W kgg W W k n +=+=ω故:tv t x txt x x n nn n nn ωωωωωωsin cos sin cos 12000+-=+-=xx 0x 1x 12平衡位置2-2 一均质等直杆,长为l ,重量为w ,用两根长h 的相同的铅垂线悬挂成水平位置,如图2-2所示。
试写出此杆绕通过重心的铅垂轴做微摆动的振动微分方程,并求出振动固有周期。
解:给杆一个微转角θ2aθ=h α2F =mg由动量矩定理:ah a mg a mg Fa M ml I M I 822cos sin 12122-=-≈⋅-====αθαθ其中12cossin ≈≈θααh l ga p ha mg ml n 22222304121==⋅+θθ g h a l ga h l p T n 3π23π2π222===2-3 一半圆薄壁筒,平均半径为R , 置于粗糙平面上做微幅摆动,如图2-3所示。
试求其摆动的固有频率。
图2-3 图2-42-4 如图2-4 所示,一质量m连接在一刚性杆上,杆的质量忽略不计,试求下列情况系统作垂直振动的固有频率:(1)振动过程中杆被约束保持水平位置;(2)杆可以在铅垂平面内微幅转动;(3)比较上述两种情况中哪种的固有频率较高,并说明理由。
图T 2-9 答案图T 2-9解:(1)保持水平位置:m kk n 21+=ω(2)微幅转动:mglllF2112+=mgl1l2xx2xx'mglll2121+=k2k1ml1l2()()()()()()()()()mgk k l l k l k l mgk k l l k l l k l l l k l mg k k l l k l k l l l l k l l mg l mgk l l l k l l l l l l k l l mg l l l l x x k F x x x 2122122212121221221121212221212211211121212122211211121221112111 ++=+-++=+-⋅+++=⎥⎦⎤⎢⎣⎡+-++++=+-+='+=故:()22212121221k l k l k k l l k e++=mk en =ω 2-5 试求图2-5所示系统中均质刚性杆AB 在A 点的等效质量。
第2章单自由度系统的振动

第2章 单自由度系统的振动
2.1 单自由度系统的自由振动
n
k eq k i i1
串联时弹簧的等效刚度
(2-3)
在图2-4(b)所示的串联情况下,可以得到如下关系
Fs k1(x0x1)
Fsk2(x2x0)
将x0 消掉,可得
Fs keq(x2x1)
keq
1 k1
1 k2
(2-11) (2-12)
x(t)Acosnt
(2-13)
A和φ也是积分常数,同样由x(0) 和 x(0) 决定。 方程(2-13)表明系统以为ωn 频率的简谐振动,这 样的系统又称为简谐振荡器。(2-13)式描述的是最 简单的一类振动。
第2章 单自由度系统的振动
2.1 单自由度系统的自由振动
飞行器结构动力学
第2章 单自由度系统的振动
西北工业大学航天学院
飞行器设计工程系
文 立 华
主 讲 教 师
第2章 单自由度系统的振动
飞行器结构动力学
第2章 单自由度系统的振动
西北工业大学
第2章 单自由度系统的振动
第2章 单自由度系统的振动
2.1 单自由度系统的自由振动 2.2 单自由度系统的强迫振动 2.3 单自由度系统的工程应用
表示,下面用牛顿定律来建立系统的运动方程。绘系 统的分离体图如图2-5(b)。
第2章 单自由度系统的振动
2.1 单自由度系统的自由振动
用 F(t)表示作用于系统上的外力,用x(t) 表示质量m 相对 于平衡位置的位移,可得:
F (t) F s(t) F d(t) m x (t)
(2 -7)
由于Fs(t)kx(t), Fd(t)cx(t) 方程(2-7)变为:
结构振动理论2-单自由度系统自由振动

由 dE 0 1、求出运动方程: mx kx 0
dt
有常力作用的机械能: E 1 mx&2 1 k( x)2 Fx
2
2
dE mx&&x& k( x)x& Fx& x&(m&x& kx) 0
dt
由 Ek max E p max E 2、求固有频率
假设 x Asin( pt ) 则 x Apcos(pt )
2
l 0
/
2
y02{3(
x l
)
4(
x l
)3}2
dx
1 2
0.486
ly02
Ek
1 2
me
y02
me 0.486 l
n
ke me
00:03
单自由度系统自由振动
例 铰接式直升机旋翼挥舞振动分析
取微元做受力分析,微元
cos
R
L
2(R cos)d 离心力对铰链轴o的力矩为
θ
ξ
(2 (R cos )d )( sin )
则系统的自由振动方程为: me ke 0
固有频率为:
n
ke me
需要注意的是,me不是梁的总质量,它可以通过梁上各 点位移关系和动能等效的原则求得。
00:03
单自由度系统自由振动
y( x, t )
y0
(t
)[3x l
4(
x )3 ] l
(x 1) l2
Ek
1 2
l y2dm 1 2
0
由此可见,弹性元件并联将提高总刚度,串联将降低总刚
度。这与电学中电阻的并联、串联结论是相反的。阻尼器串联
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
该式的曲线如右图所示, 可见,此时的振幅随时 间线性增大,需要经过 无限长时间才能到达无 穷大,也就是说,共振 需要一个相当长的建立 过程。
y(t )
Ft 2 m
Ft 2 m
VIBRATIONS OF SDOF SYSTEMS
三、“拍”的现象 现在,我们来关注一下强迫振动的过渡阶段,为简单起见, 假设初始条件均为零,此时,系统在过渡阶段响应总和为 1 F y (t ) y (sin t sin t ) y (sin t sin t ) st st 2 2 2 1 m ( ) 当激励力的频率与系统的固有频率接近时,设 2 为小量 F 则 y (t ) (sin t sin t ) 2 2 m( ) F sin t sin t sin t sin t 2 2 m( ) 2 2 F cos t sin t 2 sin t cos t m( 2 2 ) 2 2
可以看到:干扰力与惯性力同频同步变化,故只需要将干扰力幅 值和惯性力幅值同时加在结构上,此时产生的内力即最大内力. 例:求图示体系振幅、动弯矩幅值图.已知 0.5
P sin t
l/2
EI
l/2
m y(t )
P
m 2 A
Pl / 2
P
5 Pl 3 yst l EI 2 2 2 6 48 EI 3 1 4 5 Pl 2 2 A yst 1 / 3 36 EI
y 2 B cos t B 2 t sin t F 2 将 y和y 代入动力学方程 y y sin t m 整理后得 2 B cos tcos sin tsin F sin t m F 显然应有 B 2 2 m Ft Ft y sin t cos t 特解就是 2 m 2 2 m
VIBRATIONS OF SDOF SYSTEMS
若动荷载作用于质点运动方向时(激励力与惯性力方向一致), 二者的合力
FI (t ) F (t ) m 2 A sin t F sin t m 2 A F sin t 2 2 F m F sin t 2 1 F sin t 2 m 1 1 2 1 F sin t F sin t F sin t 2 2 1 1
l
=1
11
VIBRATIONS OF SDOF SYSTEMS
1 2 A FImax mA mA 4 411 5 P 48
2
29 Pl 48
P
5 Pl 96
5 P 48
例:求图示体系右端的质点振幅
P sin t
m 解:
l l
EI
k
l
m
若选右端质点竖向位移为广义坐标,其等效质量和刚度为 10 4 me m ke k 9 9 固有频率为
齐次方程的通解在前面讨论过,即为
y ( t ) C1cos( t ) C 2 sin t
现在寻找非齐次方程的特解,设其一个特解为 代入微分方程,有 解得 其中
F A sin t A sin t sin t m F F 1 A y st 2 2 1 m 2 2 m 2 1 2 F F yst 激励力幅值引起的静位移 2 m k11 激励力频率与固有频率之比, 也称为无量纲化的激励力频率
在振幅大到一定程度后,弹簧的弹力与变形将不再成比例; 即使系统完全没有阻尼,弹簧的弹力始终与变形成正比, 在 时,原动力微分方程的特解也已不能再取 y A sin t 的形式,而应改用如下形式的特解 y Btsin t 其中的常数 B, 可求出如下
VIBRATIONS OF SDOF SYSTEMS
FR max 9ql k2A 8(1 m 2 / k )
VIBRATIONS OF SDOF SYSTEMS
例:求图示体系质点处的振幅、 B点动力位移幅值,并绘 制最大动力弯矩图。已知 6 EI F sin t 3 ml A 1 1 l l l 1 l3 m 解: 11 EI 2 2 2 3 24 EI B C EI 1 1 l l 5l 5 F 3 12 l/2 l/2 EI 2 2 2 6 48 EI F 1 1 4 l/2 1 24 EI M1图 2 2 1 / 3 m11 ml 3 F 1 3 l 5 Fl yC max F12 M 2图 36 EI 3 5 6 EI 5 Fl 5 F 2 17 Fl /12 6 FImax myC max 3 m F F ml 36 EI 6 Fl / 2 3 M M 121Fl M max图 yB max max 2 EI 288EI
ke 4k me 10m
VIBRATIONS OF SDOF SYSTEMS
动力系数 静力位移 振幅
2k 2 2 1 / 2k 5m 2
1
yst
A yst
3P 4k
2k 3P 3P 2k 5m 2 4k 4k 10m 2
也可以直接根据平衡方程来求 因为此时,惯性力和外荷载同步,只需要把最大惯性力、 最大弹性力和最大荷载幅值同时加在结构上,如图
Ft sin t 2m
拍的周期很长,因 2 此实际振动的振幅 变化较慢。 在实验过程中,很慢地调频到接近共振时,系统的振幅会出 现周期性忽大忽小的变化,就是因为产生拍的现象。 由于
lim sin t 1 0 t
故
y (t )
F Ft sin t cos t cos t 2 m 2 m
VIBRATIONS OF SDOF SYSTEMS
2.4简谐激励下的无阻尼强迫振动
外界的激励有两类,一是持续的激励力;一类是持续的支 座运动。激励可能是周期的也可能是非周期的。
本节讨论简谐激励作用下无阻尼系统的强迫振动。
一、运动微分方程及其解
动力平衡方程为: 化为标准形式:
k11 y F (t ) 0 my
VIBRATIONS OF SDOF SYSTEMS
二、幅频响应曲线和振动特征
1 2 3 当θ/ω →1时, →∞。即当荷载频率接近于自振频率时,振 幅会无限增大。称为“共振”。通常把0.75< θ/ω <1.25称为 共振区。
0
重要的特性: 当θ/ω→0时, →1,荷载变化 得很慢,可当作静荷载处理。 当0< θ/ω <1时, >1,并且随 θ/ω的增大而增大。
*
令解满足初始条件,可以确定积分常数 0 y C1 =y0 , C 2 = yst 2 1 故运动微分方程的通解为 0 y 1 y (t ) y0 cos( t ) sin t yst (sin t sin t ) 2 1 前两项:初始条件决定的自由振动,初始自由振动 第三项:纯强迫振动,稳态受迫振动 第四项:伴随激励力而产生的自由振动,伴随自由振动 可以看到,即使初始条件为零,仍然有伴随自由振动发生
其中
1 2 2 1 / 1 2
F 荷载幅值作为静荷 yst F 11 m 2 载所引起的静位移
动力系数的性质:①无量纲;②只与激励力频率和固有频率 的比值有关,与其它因素无关;③其值可大于或小于1、可正 可负,正号表示位移与激励的相位差为零(同步),负号表 示位移落后激励力的相位差为180度(反拍)。
3 2 1
当θ/ω >1时, 的绝对值随θ/ω的增大而减小。当θ很大时, 荷载变化很快,结构来不及反应, →0 。
VIBRATIONS OF SDOF SYSTEMS
必须指出,上述的幅频响应曲线只是振动系统稳态运动的情 形,亦即激励力频率固定在某一值相当时间使振动达到稳定 以后的情况。
上述共振时振幅在理论上将趋向无穷大,实际上是不可能的, 因为: 实际系统不可能完全没有阻尼,而只要有极微小的阻尼就 足以限制振幅的无限扩大;
2 2
y * (t ) A sin t
VIBRATIONS OF SDOF SYSTEMS
则非齐次方程的通解为
1 y (t ) y (t ) y C1cos( t ) C 2 sin t yst sin t 2 1 假设初始条件为 0 , y (0) y 0 y (0) y
F sin t cos t 2m
VIBRATIONS OF SDOF SYSTEMS
上式可以看作是振幅按 2m sin t 逐渐变化,频率为
F
的简谐振动,其振动的曲线如图所示
这种特殊的振动现象 称作是“拍”
拍的周期为
/
Ft 2 m
y(t )
Ft sin t 2m
VIBRATIONS OF SDOF SYSTEMS
实际上,由于阻尼的存在,自由振动部分很快会衰减掉,过 渡阶段很短,很快就只剩下了稳态的强迫振动部分,因而这 一部分应引起格外关注 稳态解为
A
y (t ) A sin t
F F 2 2 2 m( ) m
1
1 yst ---稳态振幅 2 1 2 位移动力系数
也得到了振幅随时间线性增大的结论,并说明了共振的建立 过程。
VIBRATIONS OF SDOF SYSTEMS
四、结构最大位移和内力计算 因为
(t ) A 2 sin t y FI (t ) mA 2 sin t F (t ) F sin t