动力学5
化学反应动力学-第五章-气相反应动力学

上一内容
下一内容
返回
一、双分子气相化合反应
若按过渡状态理论对双分子气相化合反应进行分 析,则反应物与活化络合物之间建立动态平衡,以 浓度表示的平衡常数为:
kc fM
e
E0 RT
fA fB
k k BT h f
M E0 RT
反应速率常数为:
e
fA fB
ห้องสมุดไป่ตู้
上一内容
下一内容
返回
一、双分子气相化合反应
上一内容
下一内容
返回
一、单分子气相异构化反应
2. 反常的气相异构化反应
例如顺丁烯二酸二甲酯的顺反异构化反应
HC— COOCH3 HC— COOCH3 HC— COOCH3 C H 3O O C — C H
该反应的实测动力学参数如下: 频率因子 活化能 A = 1.3×105 s-1 E = 110.9 kJ/mol
R CH 3
R C 2H 5
R n C 3H 7
1.6×1015 4×1015
1×1015
下一内容
139.8 124.7
122.2
142.3 142.3
142.3
返回
上一内容
第五章、气相反应动力学
气相异构化反应
§5-1 单分子气相反应
这类反应的共同特点是:反应分子取得能量活化变为活 化分子,然后分解为两个自由基。
R 1 R 2 [R 1 R 2 ] R 1 R 2
由于生成的自由基的能量与活化分子的能量相近,它们 之间的能量差很小。所以,可以认为活化能E就是反应 开始状态与反应终结状态的能量之差,也可以认为就是 相应断裂键的“解离能”。其反应历程如下图所示。
结构动力学5任意荷载反应时域频域

u( ) 0
5.1 时域分析方法—Duhamel积分
1、单位脉冲反应函数 u( ) 0
u( ) 1
m
无阻尼体系的单位脉冲反应函数为:
[n (t
)]
t
0
t
有阻尼体系的单位脉冲反应函数为:
h(t
)
u(t)
1
mD
e n (t )
sin[D (t
)]
t
0
t
5.1 时域分析方法—Duhamel积分 1、单位脉冲反应函数
3、应用Fourier逆变换,由频域解U(ω)得到时域解u(t):
U () 逆Fu(t)
5.2 频域分析方法—Fourier变换法 离散Fourier(DFT)变换
在用频域法分析中涉及到两次Fourier变换,均为无穷域 积分,特别是Fourier逆变换,被积函数是复数,有时 涉及复杂的围道积分。当外荷载是复杂的时间函数 (如地震动)时,用解析型的Fourier变换几乎是不可 能的,实际计算中大量采用的是离散Fourier变换。
i2nU ()
n2U ()
1 m
P()
单自由度体系运动的频域解为:
U () H (i)P()
H (i)
1 k
[1
(
1
/ n )2]
i[2
(
/ n )]
H(iω)—复频反应函数,i是用来表示函数是一复数。
再利用Fourier逆变换,即得到体系的位移解:
u(t) 1 H (i)P()eitd 2
例如,对于无阻尼体系,当存在非零初始条件时,问题 的完整解为:
u(t)
u(0)
cosnt
u(0)
n
化学反应动力学-5

k 式中: 式中:k0 = K1 k2 Kw, H +
= K1k3 , kHA = K1 Ka k4
17
的测定: 速率常数 k0、kH+和 kHA的测定 和 O O
CH3CCH3 + X2
r = [CH 3COCH 3 ] k 0 + k H + [ H 3O ] + k HA [ HA]
{
CH3CCH2X + HX
2 k1k 2 [ Br2 ] [ BrO] = k 3 k 4 [ O3 ]
1 d [O3 ] 1 d [O2 ] 反应速率: 反应速率: × = × 2 dt 3 dt 2k1k 2 1 [ Br2 ] = {k 2 [ Br ][O3 ] + 2k3 [ Br ][O3 ]} = k4 3
2O3 → 3O2
18
(b)有弱酸存在时 ) 准一级速率常数: 准一级速率常数:
k ' = k0 + k H + [ H 3O ] + k HA [ HA]
恒定,在一系列固定[HA]下, (i)保持 pH 恒定,在一系列固定 ) 下 r [CH3COCH3] 作图,得 k′( [HA])。 作图, ′ 。 (ii) k′ [HA] 作图 ) ′ 斜率 = kHA。
(
)
4+ k1[ Ag + ][Ce 4+ ] 2+ [ Ag ] = k 1[Ce 3+ ] + k 2 [Tl + ]
k1k 2 [ Ag + ][Tl + ][Ce 4+ ] d [Tl ] 2+ 4+ r= = k3 [Tl ][Ce ] = k 1[Ce 3+ ] + k 2 [Tl + ] dt
动力学5_7讲解

1 2
m
x l cos
2
l sin
2
1 4
mR2
2
x
g
A
V mg l (1 cos ) mgl(1 cos )
2
L x
c1
L
c2
B
L
c3
T V E
例:拉格朗日方程的循环积分反映的是质点系的___。
A:某个广义动量守恒;
2
l sin
2
1 4
mR2
2
mg l (1 cos ) mgl(1 cos )
2
L
T
V
1 2
mx2
1 2
m
x
l
2
cos
2
l
2
sin
2
1 24
ml 2
2
1 2
m
x l cos
c2
mx
m
x
l
2
cos
m
x l cos
c1
1 2
mx2
1 2
m
x
l
2
cos
2
l 2
sin
2
1 24
ml
2
2
1 2
m
理论力学动力学部分5达朗伯原理
③当刚体作匀速转动且转轴通过质心C时, r FIR = 0,M IC = 0 ,惯性力系自成平衡力系。
五 达朗贝尔原理
23
3)平面运动
具有质量对称平面的刚体作平面运动,并且运 动平面与质量对称平面互相平行。
对于这种情形,先将刚体的空间惯性力系向质 量对称平面内简化,得到这一平面内的平面惯性力 系,然后再对平面惯性力系作进一步简化。
F1 FI1 FNam2m121FIiFmN1iFNFi ai
合力和外约束反力的合力,于是得
F2 a2
i
å
Mår OFr(i
+ Fi
å FrNi )+å
M+r
å FrIi O (FNi
=0 )+å
Mr O
( FIi
)
=
0
即:在质点系运动的任一瞬时,作用于质点系上的所
有主动力系,约束反力系和惯性力系构成形式上的平
五 达朗贝尔原理
24
解法1:利用达朗伯原理
取系统为研究对象,受力分析及 运动分析如图示:
运动分析:
以轮B为对象,vC = vD + wBr = wAr + wBr 求导得:aC = e Ar + e Br 由达朗伯原理:
åMO(F)
=
0,
1 2
×
P g
×r2
×eA
+
1 2
×
P g
×r2
×eB
-
P ×2r
衡力系。这就是质点系的达朗伯原理。
五 达朗贝尔原理
11
质点系达朗贝尔原理的投影形式
å Fix + FNix + FIix = Fx = 0 i
电动力学第五章答案

v
v
解
v v 1 ∂ϕ A 与 ϕ 满足洛仑兹规范 故有 ∇ ⋅ A + 2 =0 c ∂t v Q ϕ = −∇ ⋅ Ζ 代入洛仑兹规范 有 v 1 ∂ v ∇ ⋅ A + 2 ⋅ (−∇ ⋅ Ζ) = 0 c ∂t
k
v v v v* ∴ 要使上式成立 仅当 k ⋅ a k = k ⋅ a k = 0时 v v v ∴ 故 证得当取 ∇ ⋅ A = 0, ϕ = 0 时 k ⋅ a k = 0 vv vv v v v v* ik ⋅ x 3 已知 A( x , t ) = ∑ [a k (t )e + ak (t )e −ik ⋅ x ]
第五章
电磁波的辐射
如果取 ϕ = 0
有
v v B = ∇× A v v ∂A E=− ∂t
代入方程
v v ∂D ∇× H = ∂t v ∇⋅D = 0
有
v v ∂D 1> ∇ × H = ∂t
v v ∂E ∇ × B = εµ ∂t
∴ 由 1>2>得
v ∇⋅ A = 0
2
kh
v v E , B 相互垂直 v v E , B 同相 振幅比为 υ v v
1
2 可表示的波正是符合条件的平面波
所以命题得证 4. 设真空中矢势 A( x , t ) 可用复数傅立叶展开为 A( x , t ) =
v v
v v
v d 2 a k (t ) v v 1 证明 a k 满足谐振子方程 + k 2 c 2 a k (t ) = 0 2 dt
2 当选取规范 ∇ ⋅ A = 0, ϕ = 0 时 3 把 E和B 用 a k 和 a k 表示出来
车辆动力学基础5

2.制动效能的恒定性
制动效能的恒定性即抗热衰退性能。
3.制动时汽车的方向稳定性
制动时汽车按给定路径行驶的能力。 即在制动中不发生跑偏、侧滑或失去转向能力的性能。 研究的重点是:如何使汽车在保证方向稳定性的前 提下,获得最好的制动效能。
制动时车轮的受力
本节主要介绍地面制动力、制动器制动力及其与附
2''
代入
当τ=0 时,s=0
s u0
1 3 k 6
s2 u0 2
s2 s2 s2
s2 u0 2 u0 2
1 abmax 2 2 6
2.持续制动阶段汽车驶过的距离s3
持续制动阶段汽车以 abmax 作
匀减速运动,其初速度为 ue ,末 s u 2 / 2a 3 e bmax 速度为零。ຫໍສະໝຸດ (注意观察弯道的倾斜情况)
4.影响制动力系数的因素
(1)路面
表4-2 各种路面的平均附着系数 路面 峰值附着系数 滑动附着系数 0.75 沥青或混凝土路面 0.8~0.9 沥青(湿) 混凝土(湿) 砾石 土路(干) 土路(湿) 雪(压紧) 冰 0.5~0.7 0.7 0.6 0.68 0.55 0.2 0.1 0.45~0.6 0.7 0.55 0.65 0.4~0.5 0.15 0.07
1 u u0 k 2 2
ds 1 u0 k 2 由于 d 2
1 ds u0 k 2 d 2
当 2 时
1 ue u0 k 2 2 2
当 ''时,将k
1 abmax 2 2 6
ab max
中国行业标准采用平均减速度的概念
汽车系统动力学复习资料5
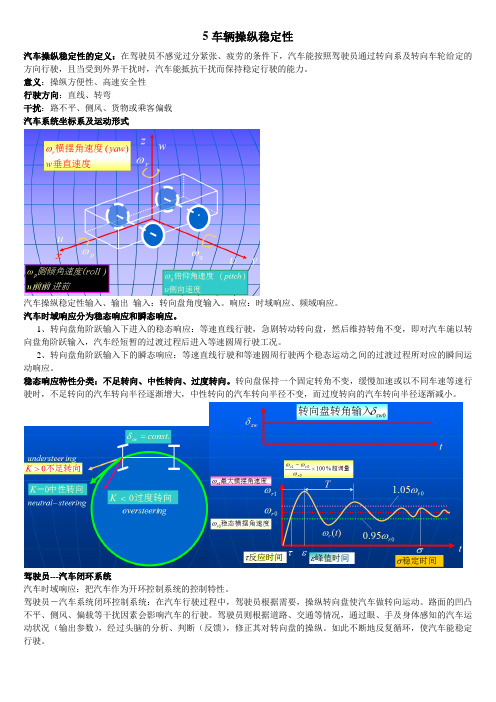
5车辆操纵稳定性汽车操纵稳定性的定义:在驾驶员不感觉过分紧张、疲劳的条件下,汽车能按照驾驶员通过转向系及转向车轮给定的方向行驶,且当受到外界干扰时,汽车能抵抗干扰而保持稳定行驶的能力。
意义:操纵方便性、高速安全性行驶方向:直线、转弯干扰:路不平、侧风、货物或乘客偏载汽车系统坐标系及运动形式汽车操纵稳定性输入、输出输入:转向盘角度输入。
响应:时域响应、频域响应。
汽车时域响应分为稳态响应和瞬态响应。
1、转向盘角阶跃输入下进入的稳态响应:等速直线行驶,急剧转动转向盘,然后维持转角不变,即对汽车施以转向盘角阶跃输入,汽车经短暂的过渡过程后进入等速圆周行驶工况。
2、转向盘角阶跃输入下的瞬态响应:等速直线行驶和等速圆周行驶两个稳态运动之间的过渡过程所对应的瞬间运动响应。
稳态响应特性分类:不足转向、中性转向、过度转向。
转向盘保持一个固定转角不变,缓慢加速或以不同车速等速行驶时,不足转向的汽车转向半径逐渐增大,中性转向的汽车转向半径不变,而过度转向的汽车转向半径逐渐减小。
驾驶员---汽车闭环系统汽车时域响应:把汽车作为开环控制系统的控制特性。
驾驶员-汽车系统闭环控制系统:在汽车行驶过程中,驾驶员根据需要,操纵转向盘使汽车做转向运动。
路面的凹凸不平、侧风、偏载等干扰因素会影响汽车的行驶。
驾驶员则根据道路、交通等情况,通过眼、手及身体感知的汽车运动状况(输出参数),经过头脑的分析、判断(反馈),修正其对转向盘的操纵。
如此不断地反复循环,使汽车能稳定行驶。
汽车操纵稳定性的评价方法1、客观评价法:通过道路试验,用测试仪器测量转向时的汽车系统的物理参数。
试验项目:(1)、蛇形试验:评价汽车的随动性、收敛性、方向操纵轻便性和事故可避性等。
(2)、响应试验(转向盘转角阶跃输入)转向瞬态:评价汽车的动态特性。
(3)、转向瞬态响应试验(转向盘转角脉冲输入):评价汽车的动态特性。
(4)、转向回正性能试验:评价汽车从曲线行驶自行回复到直线行驶的过渡过程和能力。
动力学5-势能-机械能

2、势能的大小仅有相对意义,与零势能参考点的选
取有关;两点间的势能差是绝对的,与零势能参考
点的选取无关;
3、势能是质点间的相互作用能,属于以保守力相互
作用的质点系统共有;
4、已知势能函数确定相应的保守力 设系统的势能函数为:
可以证明,该质点所受的保守力的三个分量为:
5. 势能曲线
当坐标系和势能零点一经确定,势能仅是坐标的函数。 势能随坐标变化的曲线称为势能曲线。如图:
Ep mgh h Ep Ep
r
GMm r
1 2 kx 2
r
势能曲线的用途: ⑴ 求平衡位置及判断平衡的稳定性. ⑵ 由势能曲线求保守力.(力是矢量,而势能是标量,一 般情况下,确定标量函数比确定矢量要容易) 12
W外+ W非保内=EB - EA
如果 W外=0
W非保内=0
W外 W非保内 0
则EB = EA=常量
在只有保守内力作功时质 点系的机械能保持不变。
4、能量守恒定律
封闭系统:不受外界作用的系统。 一个封闭系统内经历任何变化时,该系统的所有能量 的总和保持不变。这是普遍的能量守恒定律。 封闭系统内的各种能量可以相互转化,促使能量 转化的途径是系统的内力作功。
Mm Mm (2)引力势能: WG [( G ) ( G )] rb ra Mm 引力势能以两质点相距无 E pG G 穷远为零势能点。 r
(3)弹性势能:
弹性势能以弹簧原长为零 势能点。
注意:零势能点可以任意取,前述是一般取法。
小结:
1、只有在保守力场中,才可引入相应的势能;只要
2 Re h1 , Re h2 ; ( Re h1 )( Re h2 ) Re
大学物理课件5动力学

边界层概念及应用
边界层概念
在黏性流体流过固体壁面时,由于黏性作用,在壁面附近形成一 层流速梯度很大的薄层,称为边界层。
边界层的特点
厚度很小,但流速梯度很大,黏性力起主导作用。
应用
解释流体在管道中的流动阻力、分析飞行器的空气动力学性能等。
05
相对论力学简介
狭义相对论基本原理
相对性原理
物理定律在所有惯性参照系中形式不 变,即无法通过实验区分一个相对于 地球静止的实验室和一个相对于太空 匀速直线运动的实验室。
控制原理
采用陀螺仪、加速度计等传感器感知航空航 天器的姿态变化,通过控制算法驱动执行机 构(如舵机、喷气嘴等)进行姿态调整。
ห้องสมุดไป่ตู้
机器人运动规划与控制
运动规划
根据机器人任务需求,规划出机器人的运动 轨迹和动作序列,确保机器人能够高效、准 确地完成任务。
控制策略
采用PID控制、模糊控制、神经网络控制等 方法,对机器人的运动进行精确控制,实现
06
动力学在生活和工程中的 应用
运动生物力学与人体运动分析
运动生物力学
研究生物体运动规律的科学,通过分析肌肉力量、关节角度和运动速度等因素,揭示人 体运动的本质。
人体运动分析
应用运动生物力学原理,对人体在各种运动状态下的表现进行分析,为运动员训练、康 复治疗等提供科学依据。
工程结构动力学与抗震设计
波动
振动在介质中的传播称为波动。波动可分为机械波和电磁波 两大类。机械波需要介质传播,而电磁波可以在真空中传播 。
04
流体动力学初步
理想流体模型及伯努利方程
理想流体模型
无黏性、不可压缩的流体模型,忽略流体的黏性 和可压缩性,简化流体运动的分析。
5-结构动力学(有限元计算)解读

结构运动方程
结构运动方程是描述外部动力作用与结构体 系动力变形关系的数学物理方程,又称动力平衡 方程。运动方程可就不同角度分类,例如,离散 体系运动方程和连续体系运动方程,单自由度体 系运动方程和多自由度体系运动方程,弹性体系 运动方程和非线性体系运动方程,时域运动方程 和频域运动方程等。运动方程有时域波动方程、 差分方程、一阶微分方程、二阶微分方程、积分 方程和频域方程等不同的数学表述方式。
大,且积分方程求解困难,故一般不采用式(3.2.4)进行实际振动分析。
频域运动方程
时域运动方程经傅立叶变换可得频域运动方程。多自由 度弹性体系在地震作用下的频域运动方程为:
U () Hdd ()Ug ()
3.2.5
式中: U ( ) 为频域的地震反应矢量; H dd ( ) 为系统传递函 数矩阵; Ug () 为频域中的地震动输入矢量。运动方程(5) 为复数代数方程组,体系的频域反应经傅立叶反变换可得时 域反应。
置的空间坐标; k ( x, ) 为体系的位移影响系数,即作用于 处的单位力在 x 处
m( ) 为杆的单位长度质量; 引起的位移;p( , t ) 为随位置和时间变化的外荷载;
为杆的长度; e 为自然对数的底, i 1 , 为复阻尼系数。 具有积分微分方程形式的运动方程概念清晰,但位移影响系数的计算量
因为 u 不等于零,故可得与式 3.2.1.1-4 相同的方程。
哈密尔顿原理
哈密尔顿积分变分原理可表示为
t2
t1
δ(T V )dt δWnc dt 0
t1
t2
3.2.1.3-1
式中: 包括应变能及任何保守外力 (如 T 为体系的总动能; V 为体系的位能, 重力)的势能; Wnc 为作用于体系的非保守力(包括阻尼力及任意外荷载) 所作的功;δ 为在指定时间区间内所取的变分。哈密尔顿原理表明在任何时 间区间 t1 ~ t 2 内,动能和位能的变分与非保守力所作的功的变分之和必须等 于零。应用此原理可直接导出任何给定体系的运动方程。 在虚功分析中, 尽管功本身是标量, 但被用来计算功的力和位移都是矢 量。利用哈密尔顿原理建立运动方程时,不直接使用惯性力和弹性力,而代 之以动能和位能的变分项,平衡关系只与纯粹的标量(能量)有关,这是此 法与虚位移原理方法的区别。
化学动力学5

146.5 kJ mol
Principal of Chemical Kinetics
按照链反应的历程,所需活化能是最低的。
Page 17
Chemical Kinetics
如果 H 2 ,Cl2 直接反应:
Ea ( EH H ECl Cl ) 30% (435.1 243)kJ mol 30% 203.4kJ mol1
Br
96.2 73.6
I
71.1 139.7
H+X2=HX+X
H+HX=H2+X
8.4
20.9
5.0
5.0
0
6.3
Principal of Chemical Kinetics
Page 返回 19
Chemical Kinetics
Cl H2 HCl H
k1
Ea1 = 25.1kJ mol-1
中间产物可以采用稳态近似。
d [活性中间物] 0 dt
Principal of Chemical Kinetics Page 14
Chemical 用稳态近似推导直链反应速率方程 Kinetics
(1) Cl2 M 从H2 Cl2 2HCl的反应机理 2Cl M (2) Cl H2 HCl H d[HCl] k2[Cl][H 2 ] k3[H][Cl2 ]H Cl HCl Cl (1) (3) dt 2 (4) 2Cl M Cl2 M
Page 12
Chemical Kinetics
由复杂反应机理求总包速率方程
方法一、求解微分方程组
(1) Cl2 M 2Cl M d[H 2 ] dt r2 (2) Cl H2 HCl H (3) H Cl2 HCl Cl d [Cl2 ] r r r 1 3 4 dt (4) 2Cl M Cl2 M d [ HCl ] r2 r3 dt d[H ] 计算困难,难以得到解 dt r2 r3 析解 d [Cl ] 2r r r 2r 1 2 3 4 dt
电动力学第五章—

19
电动力学
三.辐射问题的本质也是边值问题
变化电荷、电流分布激发电磁场,电磁场又 反过来影响电荷、电流分布。空间电磁场的分布 就是在这一对矛盾相互制约下形成的。变化的电 荷电流分布一般具有边界,因此在求解时要考虑 它们的边界条件和边值关系。但是,一般情况下 这种的边界很复杂,使得电荷、电流分布无法确 定,因此使得求解问题无法进行。在本章我们仅 讨论电荷、电流分布为已知的辐射问题。
尔方程化为:
1 2 1 2 Q(t ) (r ) (r ) 2 2 2 r 0 r r c t
*
1 2 1 2 当 r 0 时, 2 (r ) 2 0 2 r r r c t 2 2 u 1 u u (r , t ) 2 2 0 令 (r , t ) 2 r c t r
2、达朗贝尔方程及推迟势的物理意义; 3、矢势的展开和偶极辐射; 4、电磁场的动量守恒。
• 本章难点: 1、矢势的展开和偶极辐射公式的导出; 2、电磁场动量密度张量的引入和意义。
第五章 电磁波的辐射
17
电动力学
引言
一. 电磁辐射
不稳定的电荷、电流激发的电磁场随时间 变化。有一部分电磁场以波的形式脱离场源 向外运动,这被称为电磁波的辐射。
A E A t t 引入标量势函数 A E t
第五章 电磁波的辐射
A (E ) 0 t A E t
22
电动力学
5- 1
电磁场的矢势和标势
二.规范变换和规范不变性
第五章 电磁波的辐射
24
A A A E ( ) t t t t t
化学反应动力学-第五章-气相反应动力学

(C6H5 )3 C C(C6H5 )32(C6H5 )3C
上一内容
下一内容
返回
二、单分子气相分解反应
这类反应的共同特点是:反应分子取得能量活化变为活 化分子,然后分解为两个自由基。
返回
生成自由基的单分子气相反应历程示意
(R1 R2)≠
Ea
-R1 R2
R1 + R2 ΔH
反应坐标
上一内容
下一内容
返回
二、单分子气相分解反应
按照阿仑尼乌斯公式 k AeEa RT
取自然对数 2.303lg k 2.303lg A Ea RT
Ea
2.303(lg A lg k)RT 1000
(2)质心点模型: 假定分子为一个质点,分子间的相互作用来源于 质点的质心力。分子间作用能的大小视为质点间 距离的函数。只有当分子间距离比较大时,即远 大于分子直径时,分子才能近似为质点。
上一内容
下一内容
返回
三、活化能
反应的活化能——活化分子具有的能量 假设A、B双分子的反应是:
A + B AB 产物
(一)碰撞理论证明了质量作用定律的正确性:
对于基元反应 A B 产物
可得:
r kab
按碰撞理论,上述反应的速率为:
r碰 pzA0B eEc RT ab
且
k pzA0B eEc RT
可见,碰撞理论从微观证明了质量作用定律的
正确性。
上一内容
下一内容
返回
七、碰撞理论与经典动力学的基本定理
势能剖面图
势能 Eb+E0+
化学动力学 (5)

4. 中间产物极大值的计算
在中间产物浓度y出现极大值时,它的一阶导数为零。 k1a k a k1t k2 t k1tm k2 tm 1 y (e e ) ym (e e ) k2 k1 k2 k1 dy k1a k2 t k1t [ k2 e k1e ] 0 k2 dt k2 k1 k1 k 2 k1
(2)当k2>>k1,
Z a(1 e
k 1t
)
2. 连续反应的近似处理
因连续反应的数学处理较复杂,所以通常采用近似处理。当其中某一
步反应的速率很慢,就将它的速率近似作为整个反应的速率,这个慢步
骤称为连续反应的速率决定步骤(rate determining step)。
3. 连续反应的c~t关系图(反映连续反应的突出特征)
K 下降,
k f / k亦下降,不利于正向反应。 b
(2)动力学观点
d ln k Ea 2 dT RT
通常活化能总为正值,所以温度升高,正向反应速率总是 增加。
对于放热反应,实际生产中,为了保证一定的反应速率, 也适当提高温度,略降低一点平衡转化率,如合成氨反应。
11.7
活化能对反应速率的影响
Ea ln k B RT
(3)定积分式
Ea 1 k2 1 ln ( ) k1 R T1 T2
设活化能与温度无关,根据两个不同温度下的 k 值求活 化能。 (4)微分式
Ea d ln k 2 dT RT
Ea 值的大小
结构动力学5

p(t )e
i j t
dt
p(t )e
k k 0
N 1
i j t k
t t
p(t )e
k k 0
N 1
i
2kj N
将离散化的谱值代入Fourier逆变换公式,并应用矩形积 分公式得:
1 u (t k ) 2 1 2
U ( )e
it k
p(τ)dτ的动力反应
:
du(t ) p( )d h(t ) , t
在任意时间t结构的反应, 等于t以前所有脉冲 作用下反应的和 :
u (t ) du
0
t
p( )h(t )d
0
t
5.1 时域分析方法—Duhamel积分 2、对任意荷载的反应
无阻尼体系动力反应的Duhamel积分公式 :
1 U ( ) i 2 nU ( ) n U ( ) P( ) m
2 2
U ( ) F u(t ) , P( ) F p(t )
5.2 频域分析方法—Fourier变换法
2U ( ) i 2 nU ( ) n U ( )
结构动力学
(2003春)
结构动力学
第五章
单自由度体系对任意荷载的反应
在实际工程中,很多动力荷载既不是简谐荷载,也 不是周期性荷载,而是随时间任意变化的荷载,需要 采用更通用的方法来研究任意荷载作用下体系的动力 反应问题。
本章介绍三种动力反应问题的分析方法: 时域分析方法—Duhamel积分法, 频域分析方法—Fourier变换法, 时域逐步积分法—中心差分法;Newmark—β法; Wilson—θ法。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
动力学5
1如图所示,用完全相同的轻弹簧A、B、C将两个相同的小球连接并悬挂,小球处于静止状态,弹簧A与竖直方向的夹角为30o,弹簧C水平,则弹簧A、C的伸长量之比为
A.∶4 B..4.. 1∶2 D.2∶1
2(2013高考浙江理综第19题)如图所示,总质量为460kg的热气球,
从地面刚开始竖直上升时的加速度为0.5m/s2,当热气球上升到
180m时,以5m/s的速度向上匀速运动。
若离开地面后热气球所受浮力保持
不变,上升过程中热气球总质量不变,重力加速度g=10m/s2。
关于热气球,
下列说法正确的是
A.所受浮力大小为4830N B.加速上升过程中所受空气阻力保持不变
C.从地面开始上升10s后的速度大小为5m/s D.以5m/s匀速上升时所受空气
阻力大小为230N
3(2013辽宁市鞍山一中模拟)如图所示,A、B两球用劲度系数为k1的
轻弹簧相连,B球用长为L的细线悬于O点,A球固定在O点正下方,且
O、A间的距离恰为L,此时绳子所受的拉力为F1,现把A、B间的弹簧换
成劲度系数为k2的轻弹簧,仍使系统平衡,此时绳子所受的拉力为F2,则F1与F2的
大小关系为
A.F1 < F2 B.F1 > F2
C.F1 = F2 D.因k1、k2大小关系未知,故无法确定
4(2013山东临沂检测)钓鱼岛是中国领土铁证如山,但日本政府一再挑衅,并于今年九月发起购岛闹剧。
对此包括港澳台在内,全国上下共同掀起保钩高潮。
中国人民解放军做为坚强后盾更是频频亮剑,一批批重量级装备纷纷闪亮出场。
国产最先进武装直升机武直-10(WZ-10)已经进行多次试飞,下图为一架WZ-10在钓鱼岛海域拖曳扫雷具进行近岛扫除水雷演习模拟图。
拖曳型扫雷具质量为m,由于近岛海水的流动对物体产生水平方向的冲击力,使软绳偏离竖直方向,当直升机相对地面静止时,绳子与竖直方向成θ角,已知物体所受的浮力不能忽略下列说法正确的是( )
A.绳子的拉力为mg
cosθ
B.绳子的拉力一定大于mg
C.物体受到海水的水平方向的作用力等于绳子的拉力
D.物体受到海水的水平方向的作用力小于绳子的拉力。