IPOS 设置案例
中国银联ipos产品方案硬件设备与驱动部分
中国银联iPOS产品方案-硬件设备与驱动部分中国银联iPOS产品方案-硬件设备与驱动部分中国银联产品创新部2011年 8月11 日版本控制信息版本号完成日期拟稿和修改人发布日期修订说明2011-8-11 孟凡高盒子支付、钱袋宝、复旦微和联迪提供支持2011-8-11 初稿版本2011-8-17 孟凡高 2011-8-17 修订内容:设备对三磁道数据的读取能力为可选;通讯速率确定为2.2kbps修正字符帧和数据帧均为11bit读磁道指令携带平台随机数获取设备随机数指令更改为必需设备激活的MAC计算输入数据修改删除验签指令更新公钥指令修改标准化认证密钥写入指令设备信息更新受认证密钥保护2011-8-18 孟凡高 2011-8-18 删除数据帧中多余校验位修改数据长度字节均为2字节2011-8-19 孟凡高 2011-8-19 增加通信层波形图增加公钥灌装指令修正指令错误字2011-8-23 孟凡高 2011-8-23 (1)增加设备中数据编码表2011-8-30 孟凡高 2011-8-30 修正设备数据表公钥更新指令中增加有效期和公钥编号2011-9-5 孟凡高2011-9-5 读取设备信息中增加返回公钥序号信息读磁条卡指令DATA[0]参数修改,响应报文修正2011-9-21 孟凡高2011-9-21 读磁条卡时,平台随机数为6字节,增加平台流水号12字节。
本文档中的所有内容为中国银联股份有限公司的机密和专属所有。
未经的明确书面许可,任何人不得。
1 硬件要求 61.1 硬件组成 61.2 硬件接口 61.3 供电要求71.4 无源设备供电波形要求 71.5 一般要求71.6 磁头要求81.7 工作环境81.8 静电保护81.9 可靠性 82 通信要求82.1 双向通信82.2 通信波特率92.3 通讯波形要求92.4 调制解调92.5 数据帧定义102.6 通信协议11读取设备信息12读磁条卡13获取随机数15设备认证15写设备信息16写入认证密钥17更新公钥18公钥灌装193 驱动要求203.1 功能要求203.2 接口要求20打开音频读数据接口20关闭音频读数据接口20从音频接口读数据接口 20打开音频写数据接口20关闭音频写数据接口20从音频接口写数据接口 21数据收发接口21刷磁条卡接口213.3 典型通信过程214 安全要求224.1设备密钥224.2安全算法234.3公钥更新234.4安全算法23RSA签名23RSA验签24RSA加密24RSA加解密示例25密钥分散算法26双倍长密钥MAC计算26哈希算法27数据加密与解密275 附录285.1设备数据表285.2 设备编号编码表29硬件要求图表 1终端侧结构硬件组成设备硬件包含:主控电路模块、安全电路模块、磁条卡信息获取电路模块以及电源管理电路模块。
百胜iPOS专业终端管理系统介绍V21课件

• 系统概述 • 系统功能模块 • 系统实施与部署 • 成功案例与效果评估 • 问题与解决方案
系统概述
定义与特点
定义
百胜ipos专业终端管理系统是一款针 对餐饮企业开发的综合性管理软件, 旨在提高餐饮企业的运营效率和顾客
满意度。
高效性
系统支持快速点单、结账、库存查询 等操作,提高工作效率。
支持多种促销方式,如满减、折 扣、赠品等,提升销售业绩和市 场竞争力。
库存管理模块
库存查询与盘点
支持实时查询库存数量、库存分布情况,方便商家进 行库存盘点和调整。
库存预警与补货
根据库存情况设置预警线,及时提醒商家进行补货, 确保库存充足。
库存调拨与转移
支持不同门店、仓库之间的库存调拨和转移,优化库 存结构,降低库存成本。
详细描述
百胜ipos专业终端管理系统v21提供全面的技术支持和服务体系,以确保用户在使用过 程中得到及时、专业的帮助。我们拥有一支经验丰富的技术支持团队,提供电话、邮件、
在线聊天等多种服务方式,为用户解决遇到的问题和困难,同时我们还提供定期的培训 和系统巡检服务,帮助用户更好地使用系统。
通过提供优质服务,提升 企业在行业内的品牌形象。
增加利润空间
通过精细化管理,提高整 体利润率。
问题与解决方案
常见问题与解决方法
总结词
常见问题与解决方法
详细描述
百胜ipos专业终端管理系统v21在运行过程中可能会遇到一些常见问题,如系统卡顿、数据同步失败、用户权限 设置不当等。针对这些问题,我们提供了一系列的解决方法,包括重启系统、检查网络连接、重新配置用户权限 等,以确保系统的稳定性和正常运行。
成熟阶段
目前,百胜ipos专业终端管理系 统已经成为业界领先的餐饮管理 系统之一,为众多餐饮企业提供 全面的解决方案。
IPOS收银操作流程
百胜IPOS门店收银操作流程一、开始营业。
1.门店登陆系统后,首要开始营业。
开始营业可以有如下图红圈标注两种方式。
点击标签栏上的“收银”进入对应的收银导航,在导航里面点击开始营业。
或者直接在“店长罗盘”里面开始营业。
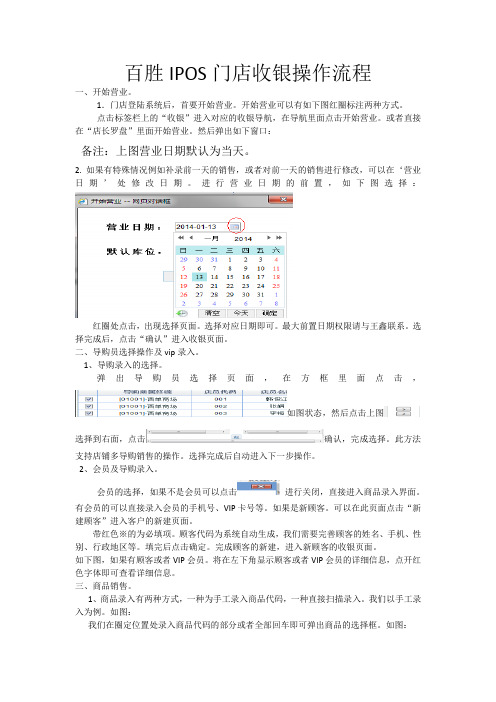
然后弹出如下窗口:备注:上图营业日期默认为当天。
2. 如果有特殊情况例如补录前一天的销售,或者对前一天的销售进行修改,可以在‘营业日期’处修改日期。
进行营业日期的前置,如下图选择:红圈处点击,出现选择页面。
选择对应日期即可。
最大前置日期权限请与王鑫联系。
选择完成后,点击“确认”进入收银页面。
二、导购员选择操作及vip录入。
1、导购录入的选择。
弹出导购员选择页面,在方框里面点击,如图状态,然后点击上图选择到右面,点击确认,完成选择。
此方法支持店铺多导购销售的操作。
选择完成后自动进入下一步操作。
2、会员及导购录入。
会员的选择,如果不是会员可以点击进行关闭,直接进入商品录入界面。
有会员的可以直接录入会员的手机号、VIP卡号等。
如果是新顾客。
可以在此页面点击“新建顾客”进入客户的新建页面。
带红色※的为必填项。
顾客代码为系统自动生成,我们需要完善顾客的姓名、手机、性别、行政地区等。
填完后点击确定。
完成顾客的新建,进入新顾客的收银页面。
如下图,如果有顾客或者VIP会员。
将在左下角显示顾客或者VIP会员的详细信息,点开红色字体即可查看详细信息。
三、商品销售。
1、商品录入有两种方式,一种为手工录入商品代码,一种直接扫描录入。
我们以手工录入为例。
如图:我们在圈定位置处录入商品代码的部分或者全部回车即可弹出商品的选择框。
如图:选择对应的颜色和尺寸,确定后进入商品价格的修改页面。
如图:商品的价格或折扣的修改可以在收银页面的右下角蓝色标签处选择对应的操作按钮点击。
即可弹出相应的对话框。
我们以改价格为例:在价格区域处填写实际售价,点确认完成操作。
如果有其他的操作点击相应的操作即可。
如果是联单销售,在商品录入位置继续录入即可,所以商品录入完成后,单击“现金收银”完成收银操作。
百胜iPOS专业终端管理系统介绍V2.1
终端系统管理要求
如何体现精 细化管理
普遍的网 络适应性
操作维护 简单合理
iPOS会员管理
根据不同类别的VIP顾客设置不同折扣,及可获取不 同的积分,实现对不同级别VIP会员的差异化管理
设置VIP发卡规则及升级规则,实现发卡提醒及VIP 的自动升级
规范的制卡及投放流程
iPOS会员管理
VIP消费分析 ✓消费特点 ✓消费趋势 ✓潜在需求分析
VIP促销 ✓生日促销 ✓短信发放促销片断 ✓顾客关怀
资金考勤
iPOS总部系统
iPOS总部系统
iPOS促销管理
总部定义促销策略,POS终端自动执行,减少人为 干预,提高执行效率。
科学分类,将促销归纳为捆绑促销及整单促销两种 支持按产品类别设置促销商品,扩展性强
促销管理
单品促销
– 全场P折
捆绑促销
– 买M件指定商品,赠N件指定商品; – 买某大类的M件,赠某大类的N件; – 买M件打P折 – S元任选N件商品
三.iPOS功能概述
一、业务背景 二、iPOS特点介绍
三、iPOS功能概述
四、核心技术平台
iPOS业务蓝图
ERP 系统
基础档案
商店配货
商店销售
财务管理
iPOS
iPOS 终端 管理 系统
总 部 系 统
iPOS 门店 系统
VIP管理 资金管理 商店收银
促销管理 市场数据分析
促销分析
调配货管理
库存管理
Ipos商店系统--盘点流程
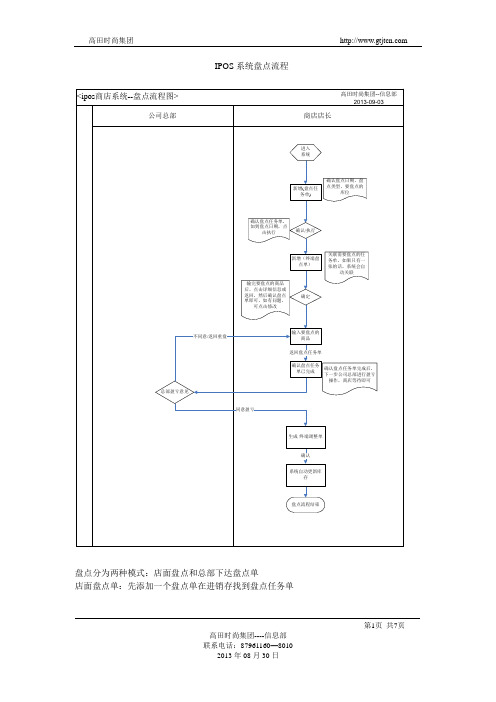
IPOS系统盘点流程
盘点分为两种模式:店面盘点和总部下达盘点单
店面盘点单:先添加一个盘点单在进销存找到盘点任务单
第1页共7页
点击添加盘点任务单出来这界面
点击确定如下图
然后点击保存如下图
在点击进入页面或返回列表那个键都行
第2页共7页
然后出现这界面
点击执行如一下图
点击确定以后如下图
在确定如下图
第3页共7页
在这点击返回不要点击确定
否则你在终端盘点单选择的时候找不到任务盘点单里的单据编号
然后到点击终端盘点单---添加终端盘点单如下图
点击确定后出现如下图
第4页共7页
在这一定要注意了不要点击进入页面和返回这两个键
找到商品这行鼠标点击进去确定或自己电脑的ENTER回车这个键出现如下图:
选择自己要盘点的商品款号双击它出现以下图:
在空白地方写出数量如下图:
第5页共7页
写完以后点击确定按钮出现如下图:
点击返回或进入页面如下图:
在现在看到的界面中后面有一个操作这一列点击确认按钮
然后在点击确认如下图
第6页共7页
在出现如下图确认列的已经打上了如下图:
在返回任务盘点单里点击任务盘点单有一个确认没操作如下图:
在操作这块点击确认图标出现一下图:
到这店面盘点操作流程已经完成了。
第7页共7页。
IPO配置文档

目录一、系统 (2)1. 系统配置 (2)2. LAN1的配置 (4)二、线路 (5)1. 干线拨入呼叫路由 (5)2. 线路组 (6)3. 线路设置 (7)1) 新建线路 (7)2) 线路配置 (7)4. 分机配置 (9)1) 分机编号 (9)2) 分机配置 (10)5. 用户设置 (11)1) 基本设置 (11)2) 语音信箱 (11)3) 转接 (12)6. 组设置 (13)7. 短代码 (13)8. 拨入呼叫路由 (14)9. 时间配置文件 (15)10. 自动应答 (15)11. ARS (16)12. 授权代码 (17)一、系统1.系统配置在系统里面要设置好区域和时间来源。
名称:可以修改设备名称,默认:= 系统MAC 地址。
注意:区域设置一定要设置正确。
因为此设置依据选择设置默认语音通信和语言设置,它还设置各种外部线路设置。
在配置时间来源里面有三个选项,如下此时间要么手动设置(请参阅时间和日期),要么使用Time Protocol(时间协议)(RFC868) 请求获取或使用Network Time Protocol (RFC958)(网络时间协议(RFC958))请求获取。
此字段用来选择使用哪种方法并根据选中的方法来应用辅助设置。
对于Server Edition 网络,主要服务器默认为使用SNTP 至 来获取其时间和日期。
次要服务器和扩展服务器默认为使用SNTP 从主要服务器获取它们的时间。
对于其他IP Office 系统,默认为Voicemail Pro/Manager。
该选项不应与Server Edition 系统一起使用,并且不能和带有Unified Communication Module 的系统一起使用,否则语音信箱服务器将被托管并从与IP Office 相同的服务器中获取其时间。
●无,系统为不进行任何时间请求。
系统时间和日期需要使用具有系统话机权限(用户| 用户)。
然后,系统可以自动将夏令时设置应用到手动设置的时间。
商店端IPOS操作教程

输入所需查询库 存的款号并回车
点击库存查询 图45
数量显示区会显示出 本店对应的库存数量
罗蒙集团股份有限公司
3.11、当顾客要退、换货时,点击按钮区的商品退换按钮,如图46所示。
点击此处的 商品退换。
图46
罗蒙集团股份有限公司
3.12、在单据编号输入区输入顾客当时的小票号码并回车,如图47所示。
每天店铺开门后第一件事情就 是登陆系统打开开始营业!
图33
罗蒙集团股份有限公司
3.2、在弹出的对话窗口中选择好日期,系统默认为当天营业日期, 然后点击确定按钮,如图34所示。
图34
罗蒙集团股份有限公司
3.3、进入如下弹出窗口的收银界面,选择好该单的负责导购员,如图35所示。
导购员可以由商店端 自己建立,有利于后 期报表中导购员的业 绩查询,任务完成核 算等。
点击确认按钮后,该批货品会自动在店内库存里面增加 打开此扩展信息可以很直观的看到发货的商品信息
图22
罗蒙集团股份有限公司
商店退货操作
2.1、打开主菜单“进销存”,然后打开左侧的退货申请单或者导航图中的退货申请单。 如图23所示。
图23
打开左侧的退货申请单或者导 航图中的退货申请单
罗蒙集团股份有限公司
3.21、选择好没有日结的日期,然后点击查询按钮,再跟平时日结一样日结。如图57所示 此处选择好没有日结的日期。 选择好日期之后再点击查询按钮!
图57
罗蒙集团股份有限公司
新建顾客资料、发放VIP卡
4.1、打开顾客主菜单,点击左边的顾客资料按钮,会弹出如下对话框,如图58所示。
首先点击顾客资料按钮
点击此处的添 加顾客按钮
可以默认当前的业务日期 选择上级仓库,直属总公司的商 店选择总公司仓库,直属总代的 商店,选择总代理的仓库
SEW内部IPOS设置和编程

举例
H10=H11+ H12; H10=H11 - H13; H10=H11 * H14; H10=H11 / H15;
LY 2_E
10/1998
IPOS-Compiler编辑器 运算指令说明 常用逻辑运算指令:
符号
“&& ” “||”
格式
(条件 1)&&(条件 2) (条件 1) ||(条件 2)
格式
说明
操作数左移 操作数右移 H3=H1<<2 H3=H1>>10
举例
例: H3=H1<<; 4 H1---0000,0000,1010,0101 H3---0000,1010,0101,0000
如果H1左移4位,右侧 由0添满
LY 2_E
10/1998
IPOS-Compiler编辑器 指令说明 常用比较指令:
H1 = 10; while ( H1 > 5 ) { H2 = H2 + 1; H1=H1-1; } while ( H1 < 20 ) { H1=H1+1; if ( H1 > 10 ) continue; H2 = H2 + 2; } 注:如果H1大于10,将不执行 H2=H2+2指令,跳到while 的末端。
说明: 便于用户编译和 解读程序。
多行注释 /* ... */
单行注释 // ...
单行注释//…
LY 2_E
10/1998
IPOS-Compiler编辑器 程序信息
选择下拉菜单
Display/Program Information
----显示程序信息
程序内存
创建日期
原文件目录
IPOS功能范文

IPOS功能范文IPOS(Intelligent Point of Sale)是指智能销售点系统,是一种集成了硬件和软件的点 of sale(POS)系统。
IPOS系统使用高级技术和智能算法,以提高销售流程的效率和准确性。
以下是IPOS系统的功能和优点的详细介绍:1.销售管理功能:-IPOS系统具有全面的销售管理功能,包括订单管理、库存管理、退货管理等。
用户可以轻松地跟踪订单的状态,并管理库存,从而提高销售计划和供应链的可视化。
-IPOS系统还能够提供实时的库存信息,帮助商家及时补充库存,以避免缺货和过量库存的问题。
该功能还可以帮助商家预测需求,优化库存管理策略。
2.支付处理功能:-IPOS系统可以集成各种支付方式,包括现金、信用卡、移动支付等。
用户可以通过IPOS系统轻松地接受各种支付方式,并自动处理支付事务,提高支付的安全性和效率。
-通过与第三方支付解决方案的集成,IPOS系统可以提供更多的支付选项,方便顾客选择自己喜欢的支付方式。
3.客户管理功能:- IPOS系统还可以集成CRM(Customer Relationship Management)系统,提供更强大的客户分析和营销功能。
通过分析客户数据,商家可以定制个性化的推广活动,增加销售额和顾客满意度。
4.数据分析功能:-IPOS系统可以自动收集和分析销售数据。
商家可以通过IPOS系统获得实时的销售报告和数据分析,包括销售额、利润率、最畅销的产品等。
这些数据可以帮助商家制定更好的业务决策和营销策略,提高效益和竞争力。
-IPOS系统还可以与其他分析工具集成,如数据仓库、业务智能工具等,提供更深入的数据洞察和报告功能。
商家可以通过这些工具深入了解销售效果,优化运营和业务模式。
5.店员管理功能:-IPOS系统可以帮助商家管理店员的工作和绩效。
商家可以设置每个店员的权限和任务,以确保销售流程的安全性和顺利进行。
-IPOS系统还可以追踪和记录店员的操作记录,包括销售数量、销售额等。
IPOS盘点操作

IPOS盘点操作总部操作部分1,登陆IPOS总部管理端,打开“单据”里面的“盘点计划单”如下图,2,然后点击“添加盘点计划单”,出现下图,计划日期填写很重要,这里就是店铺盘点日期,盘点前,必须所有销售录入完成,完成日结,已经到仓产品,请完成相应的进仓单的入库。
盘点类型按照要求选择,默认是“全盘”。
上级组织选择下,一般选择“总部”。
选择好点击“确定”,出现如下界面,然后选批量添加盘点终端,3,添加好之后,点击“确定“,出现下图,点击”确定,出现下图,保存之后,出现下图,如果还需要修改,可以点击“修改”按钮修改,无误,点击“审批”完成盘点计划任务下达。
至此,总部端的盘点前期工作完成。
剩余部分就是店铺执行盘点计划单。
—————————————————————————————————————门店完成盘点之后,总部操作登录总部管理端后,打开“单据”的“盘点任务单”单,找到完成了盘点任务的任务单,如下图,点击单据前面的“+”可以展开明细,对于此次盘点任务的处理,点击“操作”后面的那个“盈亏意见“按钮,弹出如下效果,如果同意此次盘点结果,选择“同意”确定,盘点结束,如果有问题,可以选择“重盘”确定,盘点任务单恢复初始状态,下图,让店铺重新修改盘点表。
修改之后按照前面重盘流程重新完成盘点。
———————————————————————————————————————门店操作部分登陆门店终端系统,看到如下图,看到“带处理的盘点任务单”有待执行的1张,在执行盘点任务之前,请先确认上面的待处理进货,出货完成状况,如货物已经发出,相应单据一定要做到发出,货物进仓,单据一定要做到验收。
然后点击“待执行1张”的“1”字,到达如下图,点击红圈里面的“执行”按钮,出现如下图,此时会检测是否还存在没有处理的单据,如果存在,如果存在就会出现,如果以上单据进仓,出货都已经完成,点击确定,出现“操作完成”对话框,然后点击确定。
将红圈中的“执行”状态改成“全部”,点击搜索,此时会搜索出所有“盘点任务单”,如下图,然后点击“单据编号”进入到单据里面,如下图,通常我们选择“新增盘点单”,下图,点击“确认”,出现下图,我们点“条码录入”,出现下图,扫描条码,完成之后,点击“添加到单据”。
IPOS操作手册(商店)

IPOS操作⼿册(商店)IPOS操作⼿册(商店端)⼀、系统登录1.双击打开桌⾯图标进⼊商店管理系统2.输⼊登录信息:商店代码(公司统⼀设置发放),⽤户名(公司统⼀设置发放),密码(⾃⼰设置的密码)点击登录,进⼊商店系统⼆、上班进⼊系统后开始⼀天的营业⼯作1.上班打开系统后的第⼀件事,点击开始营业。
开始⼀天的收银⼯作2.点击确认按钮,进⼊收银界⾯三、收银操作1.输⼊店员号:⿏标双击店员名字,确认开单店员如果选错了店员号,可以点击收银界⾯右下⾓的导购员菜单中修改2.扫描条码,扫描时⼀定要注意输⼊栏的光标在闪烁,如果扫描条码没有反应(绿⾊框内没有商品明细),⽤⿏标点击⼀下输⼊栏(红⾊圈框的范围)在扫描3.修改商品实销价格第⼀步:⽤⿏标点击选择要修改的商品明细(选中后的商品会以⼟黄⾊的底⾊显⽰)第⼆步:点击右下⾓改价格按钮(红⾊框)第三步:输⼊实销价格后点击确认第⼀步:⽤⿏标点击选择要修改的商品明细(选中后的商品会以⼟黄⾊的底⾊显⽰)第⼆步:点击右下⾓删⾏按钮(红⾊框)第三步:点击确定按钮,删除错误的商品信息第四步:重新扫描正确的商品信息(⽅法参考上⽂2扫描条码)5.⼩票摘要(对于⼀张⼩票中的某⼀个商品进⾏备注) 第⼀步:⽤⿏标点击选择要输⼊摘要的商品明细(选中后的商品会以⼟黄⾊的底⾊显⽰)第⼆步点击右下⾓>>翻页按钮第三步点击明细摘要输⼊备注信息后点击确认按钮6.整单备注(对于整张⼩票进⾏备注) 扫描完所有商品后点击>>翻页按钮点击整单备注按钮输⼊备注信息后点击确认按钮7.现⾦收银(客户全额⽀付现⾦的⽅式)点击现⾦收银按钮输⼊实收⾦额,点击结算按钮,收银完成,系统⾃动打印收银⼩票8.组合收银(客户⽤刷卡等⾮现⾦⽅式付款)点击组合收银按钮⽤⿏标点击客户的⽀付⽅式(红⾊框)在收款栏⾥填写该⽐⽀付⽅式实际收款⾦额(绿⾊框)点击保存(蓝⾊框)点击确认(紫⾊框)后收银完成,系统⾃动打印收银⼩票9.商品退换第⼀步:点击商品退换按钮(红⾊框)第⼆步:输⼊⼩票号后(红⾊框)点击查询按钮(绿⾊框),选择退货商品明细(蓝⾊框)后点击确定按钮(紫⾊框)第三步:如果是退货直接进⾏收银⼯作即可(具体⽅法参考5.6)如果是换货在输⼊栏⾥扫描所换的商品第四步:进⾏收银⼯作(具体⽅法参考5.6)10.当天⼩票查询点击红框标注的数字,进⼊当天⼩票明细列表(只能查看当天⼩票)情况(蓝框),⼩票重新打印(紫框)11、会员发卡客⼈消费达到发卡条件后,会出现如上图所⽰提⽰,点击确定后,登记好顾客资料,然后在VIP卡号处按“Enter”按键,会弹处空⽩VIP卡号供选择,选择完成之后,点击确定,即完成VIP发卡。
SEW伺服电机IPOS典型控制程序

/**************************************************************************** --------------------------------10.18.01 D.Broerman Copied from Version 5 of Rack Stacker Software08.01.02 D.Broerman Added Position_6a to control the Vaccum Cup extend position 10.08.02 D.Broerman V04 Added sequence to Load from Rack31.01.03 St. Reuter V05 Communication via Device Net17.04.03 IBB China CSG Pos.13Necessary Parameters:--------------------------Operating Mode = VFC-n-Reg. & IPOSParameter P700Parameter P100 Sollwertquelle = FeldbusParameter P101 Steuerquelle = FeldbusBinary Inputs Base UnitDI00 EnableP600 DI01 Release/Rapid StopP601 DI02 High Speed Input 1P602 DI03 High Speed Input 2P603 DI04 SpareP604 DI05 SpareaaaBinary Option Card 1P610 DI10 IPOS Input (Vacuum Cup Extended Prox)P611 DI11 IPOS Input (V acuum Cup Retracted Prox)P612 DI12 IPOS Input (Vacuum Switch)P613 DI13 IPOS Input (Spare)P614 DI14 IPOS Input (Spare)P615 DI15 IPOS Input (Spare)P616 DI16 IPOS Input (Spare)P617 DI17 IPOS Input (Spare)Binary Inputs IPOS Inputs PA 1 (Device Net)DI20 IPOS Input (Start Cycle Signal Stacking)DI21 IPOS Input (Stop Cycle Signal)DI22 IPOS Input (MotorRight/ Halt, Arm Up Hand)DI23 IPOS Input (MotorLeft/ Halt, Arm Down Hand)DI24 IPOS Input (Vacuum Man Mode)DI25 IPOS Input (Release Man Mode)DI26 IPOS Input (Vacuum Cup In/Out Man Mode)DI27 IPOS Input (Stacker Mode)(Automatic = 1)(ManualMode = 0)DI30 IPOS Input (Loading Cycle Start)DI31 IPOS Input (Start Rack Reference)DI32 SpareDI33 SpareDI34 SpareDI35 SpareDI36 SpareDI37 SpareBinary Outputs Base UnitDB00 Configured with BrakeP620 DO01 Drive ReadyP621 DO02 Drive FaultBinary Output Option Card 1P630 DO10 IPOS Output (Arm Down)P631 DO11 IPOS Output (Conv Release In Transport)P632 DO12 IPOS Output (Stacker Fault)P633 DO13 IPOS Output (Basic Position)P634 DO14 IPOS Output (Conv Release Out Transport)P635 DO15 IPOS Output (Vacuum Cup Extended)P636 DO16 IPOS Output (Rack Reference Position)P637 DO17 IPOS Output (Vacuum Fault)Output Option Card 2DO20 IPOS Output (Vacuum Cup Extend Sol)DO21 IPOS Output (Vacuum Cup Retract Sol)DO22 IPOS Output (Vacuum On Sol)D023 IPOS Output (Vacuum Off Sol)DO24 IPOS Output (Blow Off On)DO25 IPOS Output (Spare)DO26 IPOS Output (Spare)DO27 IPOS Output (Spare)P941 IPOS Geberquelle = Motor Encoder on Terminal X15Anwenderprogramm mit folgenden Funktionen :-------------------------------------------1)Allgemeiner ManualMode eines positioniergeregelten Antriebs.- 黚er zwei Eingangsklemmen kann der Antrieb mit einer festenGeschwindigkeit in beide Richtungen gefahren werden.- Die Lageregelung ist dabei aktiv.- Eine vorherige Referenzfahrt ist nicht notwendig.2)Betriebsart Automatic****************************************************************************/#include <const.h>#include <io.h>//================= Fahr Variables ===========================================#pragma globals 200 250long V_MotorRight, V_MotorLeft;//================= Ziel Position - Variables ==============================#define Position_0 H0#define Position_1 H1#define Position_2 H2#define Position_3 H3#define Position_4 H4#define Position_5 H5#define Position_6 H6#define Position_7 H7#define Position_8 H8#define Position_9 H9#define Position_10 H10#define Ref_Pos H11#define Position_6a H12#define Auto_Speed_0 H20#define Auto_Speed_1 H21#define Auto_Speed_2 H22#define Ref_Speed_0 H23#define Auto_Speed_3 H24#define Man_Speed_0 H25#define Auto_Speed_4 H26#define Auto_Speed_5 H27#define Auto_Speed_6 H28#define Position_Window H30#define M_State H31#define M_Fault H32#define M_Merker H33#define Pos_0 H35#define M_Loading H36#define M_Stacking H37#define Load_Pos_0 H40#define Load_Pos_1 H41#define Load_Pos_2 H42#define Load_Pos_3 H43#define Load_Pos_4 H44#define Load_Pos_5 H45#define Load_Pos_6 H46#define Load_Pos_7 H47#define Load_Pos_8 H48#define Load_Pos_9 H49#define Load_Pos_10 H50#define Load_Pos_11 H51#define Load_Pos_12 H52#define Load_Pos_6a H53#define Bustyp H100#define Le_PA_DATA H101#define PA1 H102#define PA2 H103#define PA3 H104#define Le_PE_DA TA H110#define PE1 H111#define PE2 H112#define PE3 H113//================= INPUTS ========================================= //Onboard Inputs#define E_DriveEnable DI00#define E_DriveRel DI01#define E_Touchp_1 DI02#define E_Touchp_2 DI03#define E_Spare_1 DI04#define E_Spare_2 DI05//Inputs Card DIO 11A#define E_CupExtendedProx DI10#define E_CupRetractedProx DI11#define E_VacuumSwitch DI12#define E_Spare_3 DI13#define E_Spare_4 DI14#define E_Spare_5 DI15#define E_Spare_6 DI16#define E_Spare_7 DI17//Inputs Field Bus#define E_Start_Cycle ((PA1 & 0b1)!=0)#define E_Stop_Cycle ((PA1 & 0b10)!=0)#define E_ArmRight ((PA1 & 0b100)!=0)#define E_ArmLeft ((PA1 & 0b1000)!=0)#define E_VacManMode ((PA1 & 0b10000)!=0)#define E_RelManMode ((PA1 & 0b100000)!=0)#define E_CupInOutManMode ((PA1 & 0b1000000)!=0)#define E_AutoMode ((PA1 & 0b10000000)!=0)#define E_LoadCycleStart ((PA1 & 0b100000000)!=0)#define E_ReferenceRack ((PA1 & 0b1000000000)!=0)#define E_Continue_Cycle ((PA1 & 0b10000000000)!=0)#define E_Reset_Cycle ((PA1 & 0b100000000000)!=0)#define E_Resume_Cycle ((PA1 & 0b1000000000000)!=0)#define E_Vacuum_On_Auto ((PA1 & 0b10000000000000)!=0)//================= OUTPUTS =========================================//Onboard Outputs#define A_DriveReady DO01#define A_DriveFault DO02//Outputs Card DIO 11A#define A_CupExtendSol 0 //DO20#define A_CupRetractSol 1 //DO21#define A_VacuumOnSol 2 //DO22#define A_VacuumOffSol 3 //DO23#define A_BlowOffSol 4 //DO24//Outputs Fieldbus#define PE1_Output PE1#define A_StackerArmDown 0#define A_ConvRel 1 //((PE1 & 0b10)!=0)#define A_StackerFault 2 //((PE1 & 0b100)!=0)#define A_HomePosition 3 //((PE1 & 0b1000)!=0)#define A_ConvRelOut 4 //((PE1 & 0b10000)!=0)#define A_CupExtendSwitch 5 //((PE1 & 0b100000)!=0)#define A_ArmReferencePos 6 //((PE1 & 0b1000000)!=0)#define A_VacuumFault 7 //((PE1 & 0b10000000)!=0)#define A_ArmProbePos 8 //((PE1 & 0b100000000)!=0)#define A_CupRetractSwitch 9 //((PE1 & 0b1000000000)!=0)#define A_VacuumConfirm 10 //((PE1 & 0b10000000000)!=0)#define A_RelCrosstrREV 11 //((PE1 & 0b100000000000)!=0)//================= Festwerte ===============================================#pragma list/*==================================================================== =======Subroutines====================================================================== =====*//*================================================Subroutine for Initializing the System.==================================================*/Initialize(){_AxisStop( AS_RSTOP );OptOutpIPOS = 0; // all Outputs OffControlWord = 0; // IPOS Control Word OffPos_0 = 1000;Auto_Speed_0 = 15000; // Touch Probe SearchingAuto_Speed_1 = 19500; // Drive Down StackingAuto_Speed_2 = 5000;Auto_Speed_3 = 10000;Auto_Speed_4 = 15000; // Drive UP StackingAuto_Speed_5 = 1500; // Med Peel off speedAuto_Speed_6 = 100; // Slow Peel off speedRef_Speed_0 = 29000;Man_Speed_0 = 5000;Position_1 = 250000;M_State = 0;M_Fault = 0;M_Loading = 0;M_Stacking = 0;Bustyp = 3; //Value 3 = FieldbusLe_PA_DATA = 3; //Value 3 = Rrocess Input WordsLe_PE_DATA = 3; //Value 3 = Rrocess Output Words}// End Initialize()/*================================================= Interrupt Subroutine=================================================*/ Interrupt(){_TouchProbe( TP_DIS1 );M_State = 4 ;Position_2 = H507;Position_3 = H507 + 10000; // Vacuum On 10000 Position_4 = H507 + 345834; // 345834 Position_5 = H507 + 140000; // Vac Cups Ret 200000 Position_6 = H507 + 320000; // Slow Speed 400000 Position_6a = H507 + 363000; // Vac Cup Ext 411000 Position_7 = H507 + 421000; // Vac Rel vorher 250000 // 425000 Position_8 = H507 + 438000; // Blow-off off 438000 Position_9 = H507 + 850000; // Conv Rel 850000 Position_10 = H507 + 870000; // 870000Ref_Pos = H507 + 415000; // 275000 Load_Pos_0 = H507 -10000;Load_Pos_1 = H507 + 80000; // Vac Cups RetLoad_Pos_2 = H507 + 200000; // Slow SpeedLoad_Pos_3 = H507 + 230000; // Vac Cups Ext Vac OnLoad_Pos_4 = H507 + 280000; //Load_Pos_5 = H507 + 250000; // Ret Vac CupLoad_Pos_6 = H507 + 248000; // Low SpeedLoad_Pos_6a = H507 + 220000; // Med SpeedLoad_Pos_7 = H507 + 185000; // Hi Speed Ext Vac CupLoad_Pos_8 = H507 + 70000; // Low SpeedLoad_Pos_9 = H507 + 40000; // Vac RelLoad_Pos_10 = H507 + 2000; // Conv Relreturn;} // End Interrupt()/***************************************************************** Cycling Subroutine.******************************************************************/ Cycling(){if (!E_DriveRel){M_State = 0;_BitClear (PE1_Output, A_ArmProbePos );_BitClear (PE1_Output, A_ArmReferencePos);_AxisStop(AS_RSTOP);TargetPos = SetpointPos;}}// End Cycling/***************************************************************** Manual Mode Subroutine******************************************************************/ ManualMode(){// Stacker Arm Up and Downif(E_ArmRight || E_ArmLeft ){_AxisStop( AS_ENABLE );V_MotorRight = V_MotorLeft = Man_Speed_0;_SetSys (SS_POSSPEED, V_MotorRight);if (E_ArmRight && (!E_ArmLeft)) // Klemmen abfragen_GoAbs(GO_NOW AIT, (ActPos_Mot + 409600));if (E_ArmLeft && (!E_ArmRight))_GoAbs(GO_NOW AIT, (ActPos_Mot - 409600));}if(!E_ArmRight && !E_ArmLeft ){_AxisStop( AS_RSTOP );TargetPos = SetpointPos;}// Vacuum and Releaseif (E_VacManMode){_BitSet(OptOutpIPOS, A_VacuumOnSol);_BitClear (OptOutpIPOS, A_VacuumOffSol);}if (E_RelManMode && !E_VacManMode){_BitSet(OptOutpIPOS, A_VacuumOffSol);_BitSet(OptOutpIPOS, A_BlowOffSol);_BitClear (OptOutpIPOS, A_VacuumOnSol);}else{_BitClear (OptOutpIPOS, A_BlowOffSol);}// Vacuum Cup In Out Sequenceif (E_CupInOutManMode && E_CupExtendedProx && !(M_Merker && Bit_0)) {_BitSet(OptOutpIPOS, A_CupRetractSol);_BitClear (OptOutpIPOS, A_CupExtendSol);_BitSet (M_Merker, Bit_0);}if (E_CupInOutManMode && !E_CupExtendedProx && !(M_Merker && Bit_0)) {_BitClear(OptOutpIPOS, A_CupRetractSol);_BitSet (OptOutpIPOS, A_CupExtendSol);_BitSet (M_Merker, Bit_0);}if (!E_CupInOutManMode)_BitClear (M_Merker, Bit_0);/*if (E_CupExtendedProx){_BitClear (OptOutpIPOS, A_CupExtendSol);}if (E_CupRetractedProx){_BitClear (OptOutpIPOS, A_CupRetractSol);}*/} // End ManualMode()/*================================================Automatic Mode Subroutine==================================================*/AutomaticMode(){// Scope474 = StatusWord; // only for testingif (E_Start_Cycle && !E_Stop_Cycle && E_Touchp_1 && E_DriveEnable && E_DriveRel && (M_State == 0) && (M_Fault == 0 )){_BitClear (PE1_Output, A_ConvRel);_BitSet (OptOutpIPOS, A_CupExtendSol);_BitClear(OptOutpIPOS, A_CupRetractSol);M_State = 1 ;M_Stacking = 1 ;M_Loading = 0 ;}if (E_LoadCycleStart && !E_Stop_Cycle && E_Touchp_1 && E_DriveEnable && E_DriveRel&& (M_State == 0) && (M_Fault == 0 )){_BitClear (PE1_Output, A_ConvRel);M_State = 1 ;M_Stacking = 0 ;M_Loading = 1 ;}if (E_Stop_Cycle){M_State = 0 ;M_Fault = 0 ;_AxisStop( AS_RSTOP );_TouchProbe( TP_DIS1 );_BitClear (PE1_Output, A_ArmReferencePos);_BitClear (PE1_Output, A_ArmProbePos);_BitClear (OptOutpIPOS, A_CupExtendSol);_BitClear (OptOutpIPOS, A_CupRetractSol);}switch (M_State){case 1:_SetSys( SS_ACTPOS, Pos_0 );_BitSet(H484,1);_Wait(2);ActPos_Mot = 0;TargetPos = 0;_Wait(2);_BitClear(H484,1);_TouchProbe( TP_EN1 );V_MotorRight = V_MotorLeft = Auto_Speed_0;_SetSys (SS_POSSPEED, V_MotorRight);_GoAbs (GO_NOW AIT, Position_1);M_State = 2 ;break ;case 2: //Check Drive Stopped, Start Position not Found if (StatusWord & Bit_19){( M_State = 3 );}break ;case 3: //Start Position Not Found _AxisStop( AS_RSTOP );_BitSet(PE1_Output, A_StackerFault);_TouchProbe( TP_DIS1 );M_State = 0 ;M_Fault = 1 ;break ;case 4: // Start Position Found if (!E_ReferenceRack){M_State = 5 ;}else{M_State = 8 ;}break ;case 5: // Move to Rack Reference Position V_MotorRight = V_MotorLeft = Auto_Speed_1;_SetSys (SS_POSSPEED, V_MotorRight);_GoAbs (GO_NOW AIT, Ref_Pos); // Rack Reference PositionM_State = 6 ;break ;case 6: // Release Rack Reference Motion (ge鋘dert: Stadelmeierif ((StatusWord & Bit_19) && E_CupExtendedProx) // 15.09.03){M_State = 7 ;_BitSet(PE1_Output, A_ArmReferencePos);_BitSet(PE1_Output, A_ArmProbePos);}break ;case 7:if (E_Continue_Cycle){if (!E_ReferenceRack && (M_Stacking == 1)){_BitClear (OptOutpIPOS, A_VacuumOnSol);_BitSet (OptOutpIPOS, A_VacuumOffSol);_BitSet(OptOutpIPOS, A_BlowOffSol);_Wait(500);_BitClear (PE1_Output, A_ArmReferencePos);_BitClear (PE1_Output, A_ArmProbePos);M_State = 8 ;}}else if (M_Loading == 1){_Wait(500);_BitClear (PE1_Output, A_ArmReferencePos);_BitClear (PE1_Output, A_ArmProbePos);if (!E_VacuumSwitch){M_State = 8 ;_BitSet(PE1_Output, A_VacuumFault);}else{M_State = 8 ;}}break ;case 8: // move to End Positionif (M_Stacking == 1){V_MotorRight = V_MotorLeft = Auto_Speed_4; //*******_SetSys (SS_POSSPEED, V_MotorRight);_GoAbs (GO_NOW AIT, Position_10); //End PositionM_State = 9 ;}else if (M_Loading == 1){V_MotorRight = V_MotorLeft = Auto_Speed_5; //*******_SetSys (SS_POSSPEED, V_MotorRight);_GoAbs (GO_NOW AIT, Load_Pos_0); //End PositionM_State = 9 ;}break ;case 9:if (StatusWord & Bit_19) // in Position{( M_State = 0 );}break ;}} // End AutomaticMode()/*================================================Task2 Program PositionStateMachine.Hier werden die binary Output zur R點kmeldungder Istposition gesetzt.=================================================*/ PositionStateMachine(){if (E_AutoMode && (M_State >= 5) && (M_Stacking == 1)) // Stacking Active {if ((ActPos_Mot > Position_3) && (ActPos_Mot <= Position_4)){_BitClear (OptOutpIPOS, A_VacuumOffSol); // Vac On_BitSet(OptOutpIPOS, A_VacuumOnSol);}if ((ActPos_Mot > Position_4) && (ActPos_Mot <= Position_5)){}if ((ActPos_Mot > Position_5) && (ActPos_Mot <= Position_6)){/* _BitClear (OptOutpIPOS, A_CupExtendSol); // Vac Cup Ret*//* _BitSet(OptOutpIPOS, A_CupRetractSol);*/}if ((ActPos_Mot > Position_6) && (ActPos_Mot <= Position_7)){V_MotorRight = V_MotorLeft = Auto_Speed_2; // Slow Speed_SetSys (SS_POSSPEED, V_MotorRight);if (A_CupExtendSol && (!E_VacuumSwitch)) // Check Vac Switch_BitSet(PE1_Output, A_VacuumFault);}if ((ActPos_Mot > Position_6a) && (ActPos_Mot <= Position_7)) {/* _BitClear (OptOutpIPOS, A_CupRetractSol); // Vac Cup Ext*//* _BitSet(OptOutpIPOS, A_CupExtendSol);*/_BitClear (OptOutpIPOS, A_CupExtendSol);}if ((ActPos_Mot > Position_7) && (ActPos_Mot <= Position_8)){if ((M_State >= 8)){_BitClear (OptOutpIPOS, A_VacuumOnSol); // Vac Rel_BitSet (OptOutpIPOS, A_VacuumOffSol);_BitSet (OptOutpIPOS, A_BlowOffSol);}}if ((ActPos_Mot > Position_8) && (ActPos_Mot <= Position_9)){_BitClear (OptOutpIPOS, A_VacuumOffSol); // Blow-Off Off_BitClear(OptOutpIPOS, A_CupExtendSol);V_MotorRight = V_MotorLeft = Auto_Speed_1;_SetSys (SS_POSSPEED, V_MotorRight);}if ((ActPos_Mot > Position_9) && (ActPos_Mot <= Position_10)){_BitClear (OptOutpIPOS, A_BlowOffSol);_BitSet (PE1_Output, A_ConvRel); // Conv Release_BitClear (OptOutpIPOS, A_CupExtendSol);_BitSet(OptOutpIPOS, A_CupRetractSol);}} // End Stacking Activeif (E_AutoMode && (M_State == 6) && (M_Loading == 1)) // Loading Active{if ((ActPos_Mot > Load_Pos_1) && (ActPos_Mot <= Load_Pos_2)){_BitClear (OptOutpIPOS, A_CupExtendSol); // Vac Cup Ret_BitSet(OptOutpIPOS, A_CupRetractSol);}if ((ActPos_Mot > Load_Pos_2) && (ActPos_Mot <= Load_Pos_3)){// V_MotorRight = V_MotorLeft = Auto_Speed_2; // Slow Speed// _SetSys (SS_POSSPEED, V_MotorRight);}if ((ActPos_Mot > Load_Pos_3) && (ActPos_Mot <= Load_Pos_4)){_BitClear(OptOutpIPOS, A_CupRetractSol);_BitSet (OptOutpIPOS, A_CupExtendSol); // Vac Cup Ext_BitClear (OptOutpIPOS, A_VacuumOffSol); // Vac On_BitSet(OptOutpIPOS, A_VacuumOnSol);}} // End Loading Up Activeif (E_AutoMode && (M_State == 9) && (M_Loading == 1)) // Loading Down{if ((ActPos_Mot > Load_Pos_6) && (ActPos_Mot <= Load_Pos_5)){_BitClear(OptOutpIPOS, A_CupExtendSol);_BitSet (OptOutpIPOS, A_CupRetractSol); // Vac Cup RetV_MotorRight = V_MotorLeft = Auto_Speed_6; // Low Speed_SetSys (SS_POSSPEED, V_MotorRight);}if ((ActPos_Mot > Load_Pos_6a) && (ActPos_Mot <= Load_Pos_6)){V_MotorRight = V_MotorLeft = Auto_Speed_2; // Med Speed*******************************_SetSys (SS_POSSPEED, V_MotorRight);}if ((ActPos_Mot > Load_Pos_7) && (ActPos_Mot <= Load_Pos_6a)){V_MotorRight = V_MotorLeft = Auto_Speed_4; // Hi Speed *******************************_SetSys (SS_POSSPEED, V_MotorRight);}if ((ActPos_Mot > Load_Pos_8) && (ActPos_Mot <= Load_Pos_7)){V_MotorRight = V_MotorLeft = Auto_Speed_4; // Hi Speed_SetSys (SS_POSSPEED, V_MotorRight);_BitClear(OptOutpIPOS, A_CupRetractSol);_BitSet (OptOutpIPOS, A_CupExtendSol); // Vac Cup Ext}if ((ActPos_Mot > Load_Pos_9) && (ActPos_Mot <= Load_Pos_8)){V_MotorRight = V_MotorLeft = Auto_Speed_2; // Slow Speed_SetSys (SS_POSSPEED, V_MotorRight);}if ((ActPos_Mot > Load_Pos_10) && (ActPos_Mot <= Load_Pos_9)){_BitClear (OptOutpIPOS, A_VacuumOnSol); // Vac Rel_BitSet (OptOutpIPOS, A_VacuumOffSol);_BitSet(OptOutpIPOS, A_BlowOffSol);}if ((ActPos_Mot <= Load_Pos_10)){_BitClear (OptOutpIPOS, A_VacuumOffSol); // Blow Off Off_BitClear(OptOutpIPOS, A_CupExtendSol);_BitClear (OptOutpIPOS, A_BlowOffSol);_BitSet(OptOutpIPOS, A_CupRetractSol);_BitSet (PE1_Output, A_ConvRel); // Conv Rel}} // End Loading Activeif ( E_Touchp_1 ) // Arm Down Signal {_BitSet (PE1_Output, A_StackerArmDown);_BitClear(PE1_Output, A_VacuumFault); // Reset Vacuum Fault}else{_BitClear (PE1_Output, A_StackerArmDown);}if ( E_CupExtendedProx ) // Cup Extended Signal {_BitSet (PE1_Output, A_CupExtendSwitch);}else{_BitClear (PE1_Output, A_CupExtendSwitch);}//Signal VacuumCups retract Switch => SPSif ( E_CupRetractedProx ){_BitSet(PE1_Output, A_CupRetractSwitch);}else{_BitClear(PE1_Output, A_CupRetractSwitch);}if ( E_VacuumSwitch ) // Vacuum Confirm Signal {_BitSet (PE1_Output, A_VacuumConfirm);}else{_BitClear (PE1_Output, A_VacuumConfirm);}Cycling ();} // End PositionStateMachine()/*=============================================Main Program (IPOS-Eintrittsfunktion)===============================================*/main(){/*-------------------------------------Initialization--------------------------------------*/Initialize();_SetInterrupt( SI_TOUCHP1, Interrupt);_SetTask2(T2_START, PositionStateMachine);/*-------------------------------------Main Program--------------------------------------*/while(1){_GetSys (Bustyp, GS_PODATA); //PA-Data from Field Bus in Var.H102-H104if (!E_AutoMode){M_Fault = 0;M_State = 0;_BitClear (PE1_Output, A_StackerFault);_BitClear (PE1_Output, A_ArmReferencePos);_BitClear (PE1_Output, A_ArmProbePos);_TouchProbe( TP_DIS1 );ManualMode();}if (E_AutoMode){AutomaticMode();}if (E_AutoMode && !E_Stop_Cycle && !E_V acuumSwitch && (M_State == 0) && (M_Fault == 0 )){/* _BitClear (OptOutpIPOS, A_CupExtendSol);_BitSet(OptOutpIPOS, A_CupRetractSol);*/}_SetSys (SS_PIDA TA, Le_PE_DA TA); //Variablen H111-113 as PE-Data back to Fieldbus}}。
SEW内部IPOS设置和编程ppt课件

LY 2_E
10/1998
Task2程序部分
初始程序部分 激活Task2程序
主程序部分( Task1)
.
7
IPOS-Compiler编辑器 比较功能
点击 按钮----编辑器内程序和控制器内程序比较
控制器内程序和编辑器内程序不相同
控制器内程序和编辑器内程序相同
LY 2_E
10/1998
.
8
IPOS-Compiler编辑器 编译程序
二进制输出
端子 DO17
H482.X 10
含义
2 10
DO16 9 29
开关量输出DIO11A
DO15 DO14 DO13 DO12
8
7
6
5
28
27
26
25
DO11 4 24
DO10 3 23
主板开关量输出
DO02 DO01 DB00
2
1
0
22
21
20
注:
• H482开关量输入为只读。 • 例:H482.6=1代表了DO13为高电平的状态。 • 例:H482=19=24+21+20代表了DO11、DI01和DB00为高电平的状态,
H484(IPOS 控制字)
LY 2_E
10/1998
.
34
IPOS-Compiler编辑器
H509、H510和H511----位置值
变量
H509 H510 H511
名称
ACTPOS ABS ACTPOS EXT ACTPOS MOR
说明
绝对值编码器位置值 外部编码器位置值 电机编码器位置值
IPOS变量包括系统变量、全局变量和用户变量。
CRM系统测试样例及操作手册

以上)成为白金卡
面右下角会员按钮,输入会员的卡号或手机号或顾客
3、积分卡一次性买满20000元(7 代码,点击确认,在右上角的文本框中输入商品代码
折以上)成为钻石卡
点击回车,选择尺寸颜色,输入数量,确保消费产生
其他结果:升级要有微信通知 的积分达到升级条件。点击现金收银或组合收银完成
收银操作。
输出结果:iPOS提示支付成功,在CRM360视图详情 页面等级与权益页签查看等级信息和等级变化历史。 发送会员等级变动微信通知。
在IPOS中输入卡号,显示该卡是充 收款,选择支付方式,点击确认。
5000返1000类型,系统只允许其按
吊牌价购买结算;
输出结果:iPOS中提示充值成功。在CRM中会员360
视图详情页面的储值卡账户页签中,可以查看到储值
卡的余额和充值明细。
当前状况:总部编辑好所有充值方
案,门店在所有方案全集中选择所 需。实际需要控制门店的选项范 数据准备:
7折以上商品及7折以下商品,结果
应该是7折以上积1.2分的标准积
分,7折以下不积分
3、钻石卡会员购买一笔订单中,有
7折以上商品及7折以下商品,结果
9
消费积分/消费 结算
应该是7折以上积1.5分的标准积 数据准备:各个等级的会员卡卡号 分,7折以下不积分
其他关注结果:是否触发级别变化 操作步骤:CRM中忠诚度--会员规则--等级规则页
为7月底,故IPAD 上的会员中心也要
到时候才能用 输出结果:刷新CRM的360视图列表会显示新增的会
员数据,点击新生成的顾客姓名或顾客手机号进入会
员详情页面,在详情页面可以看到CRM生成的会员卡
号。
iPOS中可以根据会员手机号或CRM生成的会员卡卡号
MBRAS配置手册
MX960BRAS配置手册2015年04月Longjiang.LiV1.0目录1IPOE简介 ......................................................................................................................................................................1.1IPoE用户认证的特点1.2Web重定向过程1.3IPOE认证过程1.4IPOE下线过程1.5IPOE基于用户业务的流量计费2PPPOE简介 ...................................................................................................................................................................2.1PPPoE认证特点2.2PPPOE认证过程2.3PPPOE下线过程2.4PPPOE基于用户业务的流量计费3配置方法 ........................................................................................................................................................................3.1Filter简介3.1.1Filter配置方法 ......................................................................................................................................................3.2IPOEBRAS配置方法3.2.1认证服务器配置 ....................................................................................................................................................3.2.2dynamic-profiles配置............................................................................................................................................3.2.3DHCP配置 ............................................................................................................................................................3.2.4接口配置 ................................................................................................................................................................3.3PPPOEBRAS配置方法3.3.1认证服务器配置 ....................................................................................................................................................3.3.2dynamic-profiles配置............................................................................................................................................3.3.3DHCP配置 ............................................................................................................................................................3.3.4接口配置 ................................................................................................................................................................ IPOE简介IPoE用户认证的特点用户认证通过WEB方式进行,使得学校的师生不必安装拨号客户端,认证功能通过IE浏览器即可方便地完成身份认证过程。
I-POFAS用户手册(嵌入式子站分册)

Version 2.1 ........................................................................................................................................... 1 1. 前言 ............................................................................................................................................. 3 2. 系统示意图 ................................................................................................................................. 3 3. 系统结构图 ................................................................................................................................. 4
4.3.1 启动和退出.............................................................................................................. 7 4.3.2 登录系统.................................................................................
IPOS盘点详细操作步骤 - 副本

IPOS盘点步骤:1、首先进入进销存,然后选择左边列表下的“盘点任务单”,之后可以看到右上角有个“添加盘点任务单”,如下图:2、点击添加盘点任务单之后,出现如下图所示:3、点击确定之后,然后点击右上角的“盘点任务单列表”,如下图所示:4、回到盘点任务单列表之后,出现如下图所示:5、进入该单据号之后,新增盘点单(备注:终端盘点单可以建很多张,大家自己决定建几张单子来录入数据,一张两张随便自己),如下图所示:6、点击“新增盘点单”之后,出现如下图所示:7、点击确定之后出现如下图所示:8、手工的单子全部输入完之后下方会显示你输入的数据,系统是自动保存你输入的数据,要删除就点击后面的“删除”按钮,要重新编辑就点击前面的“编辑”按钮如下图所示:9、输入完之后,可以关闭终端盘点单和盘点任务单,然后重新进入盘点任务单,如下图所示10、进入单号之后,点击下面的盘点单明细,下方就会显示你刚才录的盘点单(备注:如果你建了两张盘点单,那么下方就会显示两个盘点单号),此时可以进行预盈亏了,如下图所示:11、,点击左上方的“预盈亏”之后,就会跟之前的账目进行核对,如下图所示:(如果此时有差异想要导出表格核对,可以点击右上方的的“导出EXCEL”导出即可)12、如果核对出了差异,想修改,可以点击“盈亏明细”后面的“盘点单明细”,如下图所示:方的的盘点任务列表,回到盘点任务单首页进行确认和盈亏,如下图所示:14、回到盘点任务列表之后,点击后方的“确认”按钮,如下图所示:15、确认之后进行盈亏,点击“盈亏”按钮,盘点结束!(注“盈亏”按钮在确认盘点数据正确的情况下才能按,否则按了之后,库存就改变了!如果再盈亏前还想修改盘点数据,那么点击“盈亏”按钮前方的“重盘”按钮,大家请放心,点击“重盘”按钮之后,之前录入的数据都在的,直接可以继续修改之前的数据,重盘的操作步骤和以上操作步骤一样,这里不再详说)。
iPOS_终端系统操作手册(6门店级)
3.1业务提醒 .........................................................................................................................17 3.2营业状况 .........................................................................................................................17 3.3销售指标 .........................................................................................................................17
1.1系统注册 ...........................................................................................................................1 1.2登录系统 ...........................................................................................................................1 1.3菜单收藏 ...........................................................................................................................2 1.4修改密码 ...........................................................................................................................2 1.5商品资料 ...........................................................................................................................3
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
设置BDC PLC_D区的变频器参数(X,Y,Z轴相同方法)连接变频器:
1.变频器的默认IP为:19
2.168.10.4通过STEP7设置变频器的IP和名字。
2.设置完成后打开Motion studio软件.
点击上图中红色框内的新建按钮,会进入下一个画面,如下图。
1.更改项目名
称 2.更改项目存
储路径
3.点击这里进
入网络设置
进入新建项目的画面后,首先更改项目名称,然后更改存储位置,最后点击网络设置按钮。
1.点击下拉箭
头选择网络
点击下拉箭头选择变频器与总线连接的网络。
本项目的总线为profinet 总线,所以选择
Ethernet
1.本项目选择
Ethernet
点击网络编辑按钮,进入网络编辑画面。
1.点击网络编辑按钮
设置IP 地址时需要注意,这里设置的IP 地址要与STEP 7中设置的IP 地址一致,设置好以后点击OK
按钮。
1.
在这里设置变频器的IP 地址
2.设置好IP 地址
以后点击OK
选择添加的网络后,先将软件切换到在线模式,然后点击scan
按钮搜索在线设备。
3.点击SCAN 按钮搜索设备
2.点击绿色按钮
切换在线模式1.选择添加的网
络
MOTOR START UP STEP:
1.选择执行电机
初始化
1.这个界面是studio 软件从电机上读取的参数,可检查与实际电机是否相符。
2.
选择完全执行初始化。
1.检查后可点击这个按钮
3.选择伺服控制。
4.直接点击下一步(我们选择的编码器为标准的SEW编码器)
5.选择电机型号,根据电机名牌选择。
6.根据电机名牌和编码器选择
7.选择使用编码器。
8.选择速度控制。
9.相关参数设置
Stiffness:刚度设置,如果电机启动时抖动,可是当增加,但是导致的结果电机可能停止位有偏差,经验值为1(min0.8~max1.2).
Load inertia可通过点击’?’选择’test’按钮自己自动计算出结果
10.点击’apply proposal’按钮选择推荐值。
11.点击’apply proposal’按钮选择推荐值。
12.’set point source’&’control signal source’选择-->FIELDBUS,其他选择推荐值。
13.点击下载按钮(注意,下载时变频器不能有使能信号,可以通过断开变频器主电源等功能后下载)
DIP/DEH21B START UP STEP:
1.
选择绝对值编码器接口。
1.选择带手动模式的初始化
2.选择完全初始化一个新的DIP/DEH21B插卡。
第二个选项是应用于更换编码器或电机时选择,当然更换编码器或电机时也可以选择第一个
选项
3.Cycle frequency:100%
使用默认值,这个选项的意思是DIP/DEH21B插卡读取编码器脉冲的频率。
当编码器连接线很长时,可以适当减小数值。
4.选择外部编码器型号。
5.选择编码器类型。
第一个选项是增量编码器,第二个选项是绝对值编码器。
6.编码器与实际位置的估算,这里选择第一个选项,通过移动一段距离来估算编码器的脉冲值与实际距离的比率。
7.移动电机(通过Manual Mode),移动时需要多移动一点距离。
*移动前请记住编码器显示的距离值(一般为多少多少米)和编码器的脉冲值(可以在当前画面看到,在当前画面下方有两个编码器的脉冲值,第一个为电机内部编码器的脉冲值,第二个为电机外部编码器的值,监控第二个值),移动一段距离后记住编码器显示的距离值和编码器的脉冲值。
2.点击按钮可进
入手动操作
1.移动前请记住
这个值。
8.把移动的距离写入第一栏中(不管距离增加减小,都需要填写距离的绝对值),第二栏中填写移动距离的单位(一般的编码器为mm)。
9.Reference travel可以选择第二项跳过。
10.下载。
(下载时变频器不能有准备就绪信号,可以通过断开变频器的主电源等方式后,来下载)。
*********注意*********
用manual mode移动设备时,当选择的旋转方向为CW时,电机内部的编码器和外部的编码器脉冲值都要增加,CCW时,脉冲都要减小。
当CW时,如果电机内部编码器脉冲值减小,可修改P350参数。
当CW时,如果电机外部编码器脉冲值减小,可修改P951参数。
Extending position via bus:
1.Field bus type选择总线通讯方式。
(自动更新)Timeout response设置为RAPID STOP/FAULT
2.source actual position设置为ABSOL.ENC.(DIP)这个选项是外部编码器接到变频器的哪个插槽上。
Unit for speed:mm/s
M/min
L/min
这个设置的意思是速度的单位。
例如:如果设置为mm/s,那么外部的速度如果设置为20,则变频器的速度为20mm/s 如果设置为L/min,那么外部的速度如果设置为20,则变频器的速度为20rpm/min L/min与mm/s的换算为1000rpm/min=52.36mm/s
3.Place of absolute encoder:motor shaft
Way
这个设置的意思为绝对值编码器的安装位置,motor shaft为电机内部编码器,way为外部编码器(选择way)。
4.encoder resolution:这个值需要自己填写
计算方法:填写值=(第二次编码器的脉冲值—第一次编码器的脉冲值)/(第二次编码器的距离值—第一次编码器的距离值)一般经验值为80.
填写后点击下面的calculation.下面的值会自动计算出来,计算完成后点击下一步。
5.设置正转CW和反转CCW的软件限位值,其他的可以用默认值。
6.下载。
******附其他需要注意的参数******
P600:这个根据变频器的DI01~DI06有没有接线,使能后是什么功能。
P954:零点偏移(编码器脉冲值),例如现在编码器的脉冲值为50000,你想让这个位置为零点,那么就填写50000.
P802:恢复出厂设置。