ARM经典汇编程序
arm汇编语言程序设计步骤

arm汇编语言程序设计步骤ARM汇编语言是一种底层的计算机编程语言,常用于嵌入式系统和低功耗设备。
在进行ARM汇编语言程序设计时,需要按照以下步骤进行。
1. 定义代码段(Code Section)首先,我们需要定义代码段,用于存放我们编写的指令代码。
在ARM汇编语言中,代码段通常以".text"开始,以".section"结束。
2. 定义全局变量段(Data Section)全局变量段用于存放程序中需要初始化的全局变量。
在ARM汇编语言中,全局变量段通常以".data"开始,以".section"结束。
在定义全局变量时,需要使用合适的指令来分配内存空间,并为变量赋初值。
3. 定义堆栈段(Stack Section)堆栈段用于存放程序运行中产生的临时变量和函数调用所需要的数据。
在ARM汇编语言中,堆栈段通常以".bss"开始,以".section"结束。
在定义堆栈时,需要预留足够的内存空间。
4. 编写指令代码在代码段中,我们可以编写各种指令代码来实现具体的功能。
ARM汇编语言提供了丰富的指令集,可以进行算术运算、逻辑运算、数据传输等操作。
需要根据具体需求选择合适的指令。
5. 定义程序入口程序入口是程序开始执行的地方,通常是一个标签(Label),用于表示指令代码的起始位置。
在ARM汇编语言中,可以使用".globl"指令定义程序入口,并使用标签名进行标识。
6. 进行程序调用如果需要调用其他函数或子程序,则需要使用特定的指令来实现跳转。
在ARM汇编语言中,可以使用"b"指令进行无条件跳转,使用"bl"指令进行函数调用,并将返回地址保存在链接寄存器中。
7. 进行程序返回当函数执行完毕后,需要返回到函数调用的位置。
在ARM汇编语言中,可以使用"bx lr"指令实现跳转到链接寄存器中保存的返回地址。
arm汇编逻辑指令 -回复
arm汇编逻辑指令-回复ARM汇编逻辑指令ARM汇编逻辑指令是一种基于RISC(Reduced Instruction Set Computing)的指令集架构,在数字电子设备中被广泛使用。
逻辑指令主要用于实现基本的逻辑操作,例如布尔运算、比较和分支跳转等。
本文将深入探讨ARM汇编逻辑指令的各个方面,包括指令格式、操作数和指令示例等。
一、指令格式ARM汇编逻辑指令的指令格式通常包括操作码、目标寄存器和操作数等字段。
下面是一个典型的ARM汇编逻辑指令的格式:<操作码>{xx}{cond} <目标寄存器>, <操作数1>, <操作数2>其中,操作码用于指定具体的逻辑操作,xx字段用于指定操作的类型(例如AND、OR或XOR等),cond字段用于指定条件执行的条件码,目标寄存器用于存储运算结果,操作数1和操作数2分别是参与运算的操作数。
二、操作数ARM汇编逻辑指令的操作数可以是寄存器或立即数。
寄存器是存储在CPU内部的高速存储器单元,用于存储临时数据。
ARM架构通常提供了16个通用寄存器(R0-R15),其中R0-R7用于存储一般性目的数据,R8-R15用于存储特殊用途数据。
立即数是直接写在指令中的常数值,通常用于表示较小的数据。
立即数的宽度取决于具体的指令和操作码。
例如,对于AND指令,立即数可以是8位或32位的。
三、指令示例以下是一些常见的ARM汇编逻辑指令示例:1. AND指令AND指令用于将两个操作数逐位进行与运算,并将结果存储在目标寄存器中。
例如,下面的指令将执行R1 = R2 AND 3:AND R1, R2, 32. OR指令OR指令用于将两个操作数逐位进行或运算,并将结果存储在目标寄存器中。
例如,下面的指令将执行R1 = R2 OR R3:ORR R1, R2, R33. XOR指令XOR指令用于将两个操作数逐位进行异或运算,并将结果存储在目标寄存器中。
arm 汇编 指令

arm 汇编指令ARM汇编指令是一种用于编写ARM处理器程序的语言。
ARM处理器广泛应用于嵌入式系统和移动设备等领域。
ARM汇编指令与x86汇编指令有所不同,它基于RISC(精简指令集计算机)架构。
下面是一些基本的ARM汇编指令:1. 数据传输指令:用于在寄存器之间传输数据。
例如:- mov:将数据从一个寄存器传输到另一个寄存器。
- ldr:将数据从内存传输到寄存器。
2. 算术指令:用于执行加法、减法、乘法和除法等操作。
例如:- add:加法操作。
- sub:减法操作。
- mull:乘法操作。
- div:除法操作。
3. 逻辑指令:用于执行逻辑操作,如与、或、非等。
例如:- and:与操作。
- or:或操作。
- xor:异或操作。
4. 移位指令:用于对数据进行左移、右移或无符号右移。
例如:- lsr:无符号右移。
- asr:带符号右移。
- ror:循环右移。
5. 比较指令:用于比较两个寄存器的值。
例如:- cmp:比较两个寄存器的值,若相等则返回0,否则返回1。
6. 跳转指令:用于改变程序的执行流程。
例如:- b:条件跳转。
- bl:无条件跳转。
- bx:带状态跳转。
7. 循环指令:用于实现循环操作。
例如:- loop:内部循环。
- ldp:外部循环。
8. 调用指令:用于实现函数调用。
例如:- blx:带状态调用。
- bx:不带状态调用。
9. 系统调用指令:用于实现与操作系统交互的功能。
例如:- swi:执行系统调用。
10. 存储器访问指令:用于访问内存数据。
例如:- str:将数据存储到内存。
- ldr:从内存中加载数据。
以上仅为ARM汇编指令的一部分,实际上,ARM汇编指令还有很多其他功能。
为了更好地理解和使用ARM汇编指令,可以参考相关的教程和手册,并进行实际操作。
arm 汇编程序退出指令
arm 汇编程序退出指令
ARM汇编语言中的退出指令是BX LR,它的作用是将程序的控制权返回到调用它的子程序的下一条指令,也就是返回到主程序。
在ARM汇编程序中,退出指令的使用非常重要。
它可以在程序运行结束后,将控制权交还给操作系统,从而保证程序的正常退出。
下面是一个使用退出指令的示例程序:
```
.section .text
.global _start
_start:
... ; 程序的其他指令
; 退出指令
MOV R7, #1 ; 调用退出系统调用的编号
SWI 0 ; 触发系统调用
.end
```
在这个示例程序中,我们首先执行了一些其他指令,然后使用MOV 指令将退出系统调用的编号1写入寄存器R7中,接着使用SWI指令触发系统调用,实现程序的退出。
退出指令的使用非常简单,但是在程序中的位置要慎重选择。
如果退出指令放置得太早,那么程序可能无法正常执行完毕;如果放置得太晚,可能会导致程序无法正确退出。
因此,在编写程序时,我们需要根据具体的需求和逻辑来合理安排退出指令的位置。
退出指令在ARM汇编程序中是非常重要的一部分。
它能够确保程序的正常退出,并将控制权交还给操作系统。
在编写程序时,我们需要合理安排退出指令的位置,以保证程序的运行顺利结束。
arm汇编语言例子
arm汇编语言例子ARM汇编语言是一种低级语言,用于编写底层程序和嵌入式系统。
它是一种基于寄存器的体系结构,广泛应用于移动设备、嵌入式系统和嵌入式控制器等领域。
下面是十个符合要求的ARM汇编语言的例子。
1. 加法运算:```ADD R0, R1, R2 ; 将寄存器R1和R2的值相加,结果存放在R0中```2. 减法运算:```SUB R0, R1, R2 ; 将寄存器R2的值从R1中减去,结果存放在R0中```3. 乘法运算:```MUL R0, R1, R2 ; 将寄存器R1和R2的值相乘,结果存放在R0中```4. 除法运算:```SDIV R0, R1, R2 ; 将寄存器R1的值除以R2,结果存放在R0中```5. 位移运算:```LSL R0, R1, #3 ; 将寄存器R1的值左移3位,结果存放在R0中```6. 逻辑运算:```AND R0, R1, R2 ; 将寄存器R1和R2的值进行与运算,结果存放在R0中```7. 条件分支:```CMP R0, #10 ; 将寄存器R0的值与10进行比较BNE label ; 如果不相等,则跳转到label处执行```8. 循环结构:```MOV R0, #0 ; 将寄存器R0的值设为0LOOP: ADD R0, R0, #1 ; 将寄存器R0的值加1CMP R0, #10 ; 将寄存器R0的值与10进行比较BLT LOOP ; 如果小于10,则跳转到LOOP处继续执行```9. 函数调用:```PUSH {R0, R1, R2} ; 将寄存器R0、R1和R2的值压入栈中BL function ; 调用名为function的函数POP {R0, R1, R2} ; 将栈中的值弹出到寄存器R0、R1和R2中```10. 中断处理:```LDR R0, =ISR ; 将中断服务程序的地址加载到寄存器R0中LDR R1, =0x1234 ; 将待处理的中断号加载到寄存器R1中STR R0, [R1] ; 将中断服务程序的地址存储到中断向量表中```这些例子涵盖了ARM汇编语言的基本操作,包括算术运算、位移运算、逻辑运算、条件分支、循环结构、函数调用和中断处理等。
ARM经典汇编指令集
寄存器:在任何时候,通用寄存器R14-R0,程序计数器R15(PC),一个状态寄存器都是可以访问的。
在ARM工作状态下,任意时刻可以访问16个通用寄存器和一到二个状态寄存器。
在非用户模式下,则可访问到特定模式分组寄存器。
Thumb状态下的寄存器集是ARM状态下寄存器集的一个子集,程序可以直接访问8个通用寄存器(R7-R0),程序计数器PC,堆栈指针SP,连接寄存器LR和CPSR。
在Thumb状态下和ARM状态下的R0-R7是相同的。
在Thumb状态下和ARM状态下的CPSR和SPSR是相同的。
在Thumb状态下的SP对应ARM状态下的R13在Thumb状态下的LR对应ARM状态下的R14通用寄存器:>不分组寄存器R0-R7>分组寄存器R8-R14>程序计数器R15不分组通用寄存器:R0-R7.,这意味者所有处理模式下,访问的都是同一个物理寄存器。
未分组寄存器没有被系统用于特别用途,任何可采用通用寄存器的应用场合都可以使用未分组寄存器。
分组模式寄存器:1)FIQ模式分组寄存器R8-R12:2)FIQ以外的分组寄存器R8-R123)寄存器R13通常用做堆栈指针SP4)寄存器R4用作子程序链接寄存器LR,指向函数的返回地址。
程序计数器:R15被用作程序计数器,也称为PC,其值等于当前正在执行的指令的地址+8。
因为在取地址和执行之间多了一个译码阶段。
状态寄存器:ARM所有工作模式下都可以访问程序状态寄存器CPSR。
CPSR包含条件码标志、中断禁止位、当前处理器模式以及其它状态和控制信息。
CPSR在每种异常模式下都有一个对应的物理寄存器------程序状态保存寄存器SPSR。
当异常出现时,SPSR用于保存CPSR的值,以便异常返回后恢复异常发生时的工作状态。
多寄存器寻址:采用多寄存器寻址方式,一条指令可以完成多个寄存器值的传送。
这寻址方式可以用一条指令完成传送最多16个通用寄存器的值。
例如:LDM IA R0,{R1,R2,R3,R4};R1←[R0]; R2←[R0+4]; R3←[R0+8]; R4←[R0+12]该指令的后缀IA表示每次执行完加载、存储操作后,R0按字节长度增加,因此,指令可将连续存储单元的值送到R1-R4。
arm 汇编 位操作
ARM 汇编语言提供了丰富的位操作指令,这些指令可以在位级别上操作数据,从而实现各种位运算和位操作功能。
以下是一些常用的ARM 汇编位操作指令:1. AND 指令:该指令将两个操作数的相应位进行逻辑与操作,并将结果存储在目标寄存器中。
例如:```AND r0, r1, r2 ; 将r1 和r2 的相应位进行逻辑与操作,并将结果存储在r0 中```2. EOR 指令:该指令将两个操作数的相应位进行逻辑异或操作,并将结果存储在目标寄存器中。
例如:```EOR r0, r1, r2 ; 将r1 和r2 的相应位进行逻辑异或操作,并将结果存储在r0 中```3. ORR 指令:该指令将两个操作数的相应位进行逻辑或操作,并将结果存储在目标寄存器中。
例如:```ORR r0, r1, r2 ; 将r1 和r2 的相应位进行逻辑或操作,并将结果存储在r0 中```4. BIC 指令:该指令将目标寄存器的相应位清零,其他位保持不变。
例如:```BIC r0, r1, r2 ; 将r1 的相应位清零,其他位保持不变,并将结果存储在r0 中```5. MVN 指令:该指令将目标寄存器的相应位取反,其他位保持不变。
例如:```MVN r0, r1 ; 将r1 的相应位取反,其他位保持不变,并将结果存储在r0 中```这些是ARM 汇编语言中常用的位操作指令,它们可以帮助您在汇编语言中进行高效的位运算和位操作。
请注意,这些指令的用法可能会因ARM 架构版本和具体的处理器型号而有所不同。
因此,在实际应用中,建议查阅相关ARM 架构文档以了解更详细的信息。
arm r5核 汇编指令
arm r5核汇编指令
ARM R5核是一种32位嵌入式处理器核,支持Thumb-2和Thumb指令集。
以下是一些常用的ARM R5核汇编指令:
1. 加载/存储指令:
- LDR:加载一个值到寄存器中
- STR:将一个寄存器的值存储到内存中
- LDM:从内存中加载一组寄存器的值
- STM:将一组寄存器的值存储到内存中
2. 算术/逻辑指令:
- ADD:将两个操作数相加
- SUB:将第二个操作数从第一个操作数中减去
- MUL:将两个操作数相乘
- AND:对两个操作数执行按位与操作
- ORR:对两个操作数执行按位或操作
- EOR:对两个操作数执行按位异或操作
3. 流程控制指令:
- B:无条件分支到指定的地址
- BL:分支到指定的地址,并将当前地址保存到链接寄存器中
- CMP:比较两个操作数的值
- BEQ:如果比较结果为相等,则分支到指定的地址
- BNE:如果比较结果为不相等,则分支到指定的地址
4. 位操作指令:
- LSL:将一个寄存器的值左移指定的位数
- LSR:将一个寄存器的值右移指定的位数
- ASR:将一个寄存器的值算术右移指定的位数
- ROR:将一个寄存器的值循环右移指定的位数
- REV:反转一个32位字的字节顺序
以上只是一些常见的ARM R5核汇编指令的例子,还有很多其他指令可用于处理更复杂的操作。
具体的指令集和用法可以查阅ARM Architecture Reference Manual(ARM架构参考手册)。
arm汇编编程范例
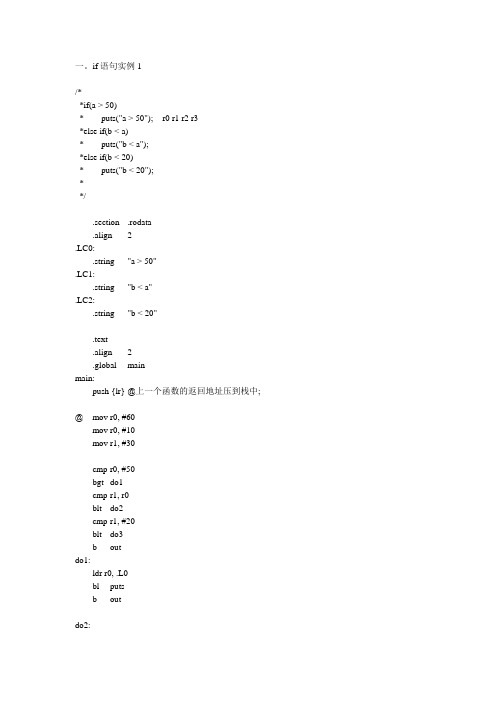
一。
if语句实例1/**if(a > 50)* puts("a > 50"); r0 r1 r2 r3*else if(b < a)* puts("b < a");*else if(b < 20)* puts("b < 20");**/.section .rodata.align 2.LC0:.string "a > 50".LC1:.string "b < a".LC2:.string "b < 20".text.align 2.global mainmain:push {lr} @上一个函数的返回地址压到栈中;@ mov r0, #60mov r0, #10mov r1, #30cmp r0, #50bgt do1cmp r1, r0blt do2cmp r1, #20blt do3b outdo1:ldr r0, .L0bl putsb outdo2:ldr r0, .L0+4bl putsb outdo3:ldr r0, .L0+8bl putsout:pop {pc} @从栈中取出lr存到pc中;.L0:.word .LC0.word .LC1.word .LC2if语句实例2, &运算/**if (a > 10 &&<20)* puts("a > 10 && a < 20");*/.section .rodata.align 2.LC0:.string "a > 10 && a < 20".text.align 2.global mainmain:push {lr} @上一个函数的返回地址压到栈中;mov r0, #15@if( (a>10) && (a<20) )@ puts("a > 10 && a < 20");cmp r0, #10ble outcmp r0, #20ldrlt r0, .L0bllt printfout:pop {pc} @从栈中取出lr存到pc中;.word .LC0if语句实例3, ||运算.section .rodata.align 2.LC0:.string "a < 10 || a > 20".text.align 2.global mainmain:push {lr} @上一个函数的返回地址压到栈中;mov r0, #15@if( (a<10) || (a>20) )@ puts("a < 10 || a > 20");cmp r0, #10blt docmp r0, #20ble outdo:ldr r0, .L0bl putsout:pop {pc} @从栈中取出lr存到pc中;.L0:.word .LC0二,switch语句的实现1/**char ch = 'A';**switch (ch)*{* case x:* break;* ...*}*/.section .rodata.align 2.LC0:.ascii "val = %d \012\000".text.align 2.global mainmain:stmfd sp!, {fp, lr}add fp, sp, #4sub sp, sp, #16mov r3, #65 @ch = 'A';strb r3, [fp, #-5]ldrb r3, [fp, #-5] @ zero_extendqisi2str r3, [fp, #-16] @int --> switchldr r3, [fp, #-16]cmp r3, #45 @二分查找;beq .L5ldr r3, [fp, #-16]cmp r3, #45bgt .L9ldr r3, [fp, #-16]cmp r3, #2beq .L3ldr r3, [fp, #-16]cmp r3, #9beq .L4b .L11.L9:ldr r3, [fp, #-16]cmp r3, #97beq .L7ldr r3, [fp, #-16]cmp r3, #99beq .L8ldr r3, [fp, #-16]cmp r3, #65beq .L6b .L11ldrb r3, [fp, #-5] @ zero_extendqisi2ldr r0, .L12mov r1, r3bl printfb .L11.L8:ldrb r3, [fp, #-5] @ zero_extendqisi2ldr r0, .L12mov r1, r3bl printfb .L11.L3:ldrb r3, [fp, #-5] @ zero_extendqisi2ldr r0, .L12mov r1, r3bl printfb .L11.L4:ldrb r3, [fp, #-5] @ zero_extendqisi2ldr r0, .L12mov r1, r3bl printfb .L11.L5:ldrb r3, [fp, #-5] @ zero_extendqisi2ldr r0, .L12mov r1, r3bl printfb .L11.L6:ldrb r3, [fp, #-5] @ zero_extendqisi2ldr r0, .L12mov r1, r3bl printf.L11:sub sp, fp, #4ldmfd sp!, {fp, pc}.L13:.align 2.L12:.word .LC0switch语句的实现2(哈希实现).section .rodata.align 2.LC0:.ascii "val = %d \012\000".text.align 2.global mainmain:stmfd sp!, {fp, lr}add fp, sp, #4sub sp, sp, #16mov r3, #65strb r3, [fp, #-5]ldrb r3, [fp, #-5] @ zero_extendqisi2sub r3, r3, #59cmp r3, #8ldrls pc, [pc, r3, asl #2]b .L11.L9:.word .L3.word .L4.word .L11.word .L5.word .L6.word .L11.word .L7.word .L11.word .L8.L3:ldrb r3, [fp, #-5] @ zero_extendqisi2ldr r0, .L12mov r1, r3bl printfb .L11.L4:ldrb r3, [fp, #-5] @ zero_extendqisi2ldr r0, .L12mov r1, r3bl printfb .L11.L6:ldrb r3, [fp, #-5] @ zero_extendqisi2ldr r0, .L12mov r1, r3bl printfb .L11.L5:ldrb r3, [fp, #-5] @ zero_extendqisi2ldr r0, .L12mov r1, r3bl printfb .L11.L8:ldrb r3, [fp, #-5] @ zero_extendqisi2ldr r0, .L12mov r1, r3bl printfb .L11.L7:ldrb r3, [fp, #-5] @ zero_extendqisi2ldr r0, .L12mov r1, r3bl printf.L11:sub sp, fp, #4ldmfd sp!, {fp, pc}.L13:.align 2.L12:.word .LC0.size main, .-main.ident "GCC: (Sourcery G++ Lite 2008q3-72) 4.3.2".section .note.GNU-stack,"",%progbits三,while语句实现1/**while(1)*{* if(i >= 10)* break;* printf("i = %d \n", i);* i++;*}*/.section .rodata.align 2.LC0:.string "i = %d \n".text.align 2.global mainmain:push {lr} @上一个函数的返回地址压到栈中;@for(i = 0; i < 10; i++)@{@ printf("i = %d \n", i);@}@i = 0;mov r4, #0loop:cmp r4, #10bge outldr r0, .L0mov r1, r4bl printfadd r4, #1b loopout:pop {pc} @从栈中取出lr存到pc中;.L0:.word .LC0四,for语句实现1/**for (;;)* ;*/.section .rodata.align 2.LC0:.string "a > b".text.align 2.global mainmain:push {lr} @上一个函数的返回地址压到栈中;loop:ldr r0, .L0bl printfb looppop {pc} @从栈中取出lr存到pc中;.L0:.word .LC0for语句实现2/**for (;;)*{* printf("a > b");* sleep(1);*}*/.section .rodata.align 2.LC0:.string "a > b".text.align 2.global mainmain:push {lr} @上一个函数的返回地址压到栈中;loop:ldr r0, .L0bl putsmov r0, #1bl sleepb looppop {pc} @从栈中取出lr存到pc中;.L0:.word .LC0for语句实现3/**for (i = 0; i < 10; i++)*{* printf("a > b");* sleep(1);*}**/.section .rodata.align 2.LC0:.string "a > b".text.align 2.global mainmain:push {lr} @上一个函数的返回地址压到栈中;mov r4, #10loop:cmp r4, #0beq outldr r0, .L0bl putsmov r0, #1bl sleepsub r4, r4, #1b loopout:pop {pc} @从栈中取出lr存到pc中;.L0:.word .LC0for语句实现4/**for (i = 10; i > 0; i--)*{* printf("a > b");* sleep(1);*}*/.section .rodata.align 2.LC0:.string "a > b".text.align 2.global mainmain:push {lr} @上一个函数的返回地址压到栈中;mov r1, #10loop:cmp r1, #0beq outldr r0, .L0bl puts @ --> write@ r0 r1 r2 r3@ puts r4 r5 r6@ atpcs : r4-r14mov r0, #1bl sleep @ sleep -> alarmsub r1, r1, #1b loopout:pop {pc} @从栈中取出lr存到pc中;.L0:.word .LC0for语句实现5/**for(i = 0; i < 10; i++)*{* printf("i = %d \n", i);*}*.section .rodata.align 2.LC0:.string "i = %d \n".text.align 2.global mainmain:push {lr} @上一个函数的返回地址压到栈中;mov r4, #0loop:cmp r4, #10bge outldr r0, .L0mov r1, r4bl printfadd r4, #1b loopout:pop {pc} @从栈中取出lr存到pc中;.L0:.word .LC0for语句实现6/**for(i = 0; i < 10; i++)*{* for(j = 0; j < 10; j++)* {* printf("i = %d j = %d \n", i, j);* }*}*/.section .rodata.align 2.LC0:.string "i = %d j = %d\n".text.align 2.global mainmain:push {lr} @上一个函数的返回地址压到栈中;mov r4, #0for:cmp r4, #10bge outmov r5, #0for1:cmp r5, #10bge out1ldr r0, .L0mov r1, r4mov r2, r5bl printfadd r5, #1b for1out1:add r4, #1b forout:pop {pc} @从栈中取出lr存到pc中;.L0:.word .LC0do_wihle 语句实现/**i = 0;*do{* printf("i = %d \n", i);* i++;*}while(i < 10);**/.section .rodata.align 2.LC0:.string "i = %d \n".text.align 2.global mainmain:push {lr} @上一个函数的返回地址压到栈中;mov r4, #0loop:ldr r0, .L0mov r1, r4bl printfadd r4, #1cmp r4, #10blt looppop {pc} @从栈中取出lr存到pc中;.L0:.word .LC0。
arm汇编算法
ARM汇编语言是一种基于ARM架构的低级编程语言,广泛用于嵌入式系统和底层软件开发。
通过直接操作硬件资源,它能够高效地实现各种算法,从简单的数据处理到复杂的加密解密算法。
下面我将介绍一个使用ARM汇编语言实现的经典算法——冒泡排序。
冒泡排序是一种简单的排序算法,通过反复交换相邻的未排序元素,使得最大(或最小)的元素像气泡一样逐渐“浮”到数列的一端。
在ARM汇编语言中,我们可以使用循环结构和条件语句来实现这一算法。
首先,我们需要定义待排序的数据数组和相关的变量。
然后,使用嵌套的循环结构,外层循环控制排序的轮数,内层循环负责两两比较并交换元素。
通过比较相邻元素的大小,如果顺序不对则交换它们的位置。
这个过程会一直重复,直到整个数组变得有序。
在ARM汇编语言中,我们可以使用寄存器来存储待比较的元素,使用条件语句来判断它们的大小关系,然后使用数据交换指令来交换它们的位置。
通过这种方式,我们可以高效地实现冒泡排序算法,并且对硬件资源的占用也非常有限。
需要注意的是,由于ARM汇编语言是一种低级语言,编程时需要仔细考虑内存访问、寄存器分配和指令流水线等因素,以确保程序的正确性和高效性。
此外,为了提高算法的效率,还可以使用一些优化技巧,如减少不必要的比较次数和利用已排序的子序列等。
总的来说,ARM汇编语言在算法实现方面具有很强的灵活性和高效性。
通过使用适当的数据结构和算法技巧,我们可以编写出高效且可靠的程序来满足各种实际需求。
arm汇编语言程序设计步骤
arm汇编语言程序设计步骤以ARM汇编语言程序设计步骤为标题,本文将详细介绍ARM汇编语言程序设计的步骤和相关知识。
一、ARM汇编语言简介ARM汇编语言是一种低级程序设计语言,用于编写针对ARM架构的机器码指令。
它是一种直接操作硬件的语言,具有高效性和灵活性。
二、ARM汇编语言程序设计步骤1. 确定程序目标和需求:在开始编写ARM汇编程序之前,首先要明确程序的目标和需求。
这包括确定程序的功能、输入和输出,以及所需的数据结构和算法。
2. 了解ARM架构:ARM架构具有多种版本和变体,每个版本都有不同的特性和指令集。
在编写ARM汇编程序之前,应该熟悉所用的ARM架构的特性和指令集。
3. 编写伪指令和数据段:ARM汇编语言中,伪指令用于定义常量、变量和数据段。
在编写程序之前,需要使用伪指令定义所需的数据段,并为程序分配必要的内存空间。
4. 编写指令段:指令段是ARM汇编程序的核心部分,包含实际执行的指令。
在编写指令段时,需要使用合适的指令来实现程序的功能。
指令可以包括算术运算、逻辑运算、分支跳转等。
5. 调试和测试:编写完ARM汇编程序后,需要进行调试和测试以确保程序的正确性和稳定性。
可以使用调试工具和模拟器来调试程序,并通过输入不同的测试数据进行测试。
6. 优化性能:在完成调试和测试后,可以对程序进行性能优化。
ARM汇编语言具有很高的性能优化空间,可以通过优化算法、减少指令数和利用硬件特性等方式来提升程序的执行效率。
7. 文档编写和维护:编写完ARM汇编程序后,应该撰写相应的文档来记录程序的功能、设计和使用方法。
文档应该清晰明了,方便其他人理解和使用。
三、ARM汇编语言编程技巧1. 熟悉寄存器:ARM架构包含多个通用寄存器和特殊寄存器,熟悉不同寄存器的用途和特性对于编写高效的ARM汇编程序非常重要。
2. 使用合适的指令:ARM汇编语言提供了丰富的指令集,选择合适的指令可以提高程序的效率。
需要根据程序需求和算法特点选择合适的指令。
arm 32 常见汇编指令 对应的机器码

arm 32 常见汇编指令对应的机器码
ARM 32位汇编指令是一种用于ARM架构的低级编程语言,它将人类可读的汇编指令转换为机器码,从而实现对计算机硬件的直接控制。
以下是几个常见的ARM 32位汇编指令及其对应的机器码:
1. MOV指令:将一个数据从一个位置复制到另一个位置。
机器码:0xMOV Rd, Rn
2. ADD指令:将两个数据相加并将结果存储在目标寄存器中。
机器码:0xADD Rd, Rn, Rm
3. SUB指令:将两个数据相减并将结果存储在目标寄存器中。
机器码:0xSUB Rd, Rn, Rm
4. CMP指令:比较两个数据的大小,并根据比较结果设置条件代码。
机器码:0xCMP Rn, Rm
5. LDR指令:从内存中加载数据到寄存器中。
机器码:0xLDR Rd, [Rn, #offset]
6. STR指令:将寄存器中的数据存储到内存中。
机器码:0xSTR Rd, [Rn, #offset]
7. B指令:无条件跳转到指定的地址。
机器码:0xB label
8. BEQ指令:如果上一次比较结果为相等,则跳转到指定的地址。
机器码:0xBEQ label
以上是ARM 32位汇编指令的一些常见例子,每个指令都有对应的机器码。
通过编写汇编程序,程序员可以直接对计算机硬件进行控制,实现各种功能。
虽然汇编语言比高级语言更难以理解和编写,但它提供了更高的灵活性和效率,特别适合对性能要求较高的应用。
第3章ARM汇编语言程序设计GNU汇编ppt课件
时将程序计数器PC指向子程序的入口点,当子程序执行完毕需要返回调用处时, 只需要将存放在LR中的返回地址重新复制给程序计数器PC即可。在调用子程序的 同时,也可以完成参数的传递和从子程序返回运算的结果,通常可以使用寄存器 R0~R3完成。 以下是使用BL指令调用子程序的汇编语言源程序的基本结构:
.string/.asciz/.ascii
语法格式 .string/.asciz/.ascii 表达式{,表达式}...
作用
.string/.asciz/.ascii定义多个字符串。 注意:ascii伪操作定义的字符串需要自动添加结尾字符'\0'
举例
.string "abcd","hello"
bne 1f @跳转到1标号去执行 局部标号代表它所在的地址,因此也可以当作变量或
者函数来使用。
Linux汇编程序中的分段
(1).section伪操作
用户可以通过.section伪操作来自定义一个段,格式如下 :
.section section_name [, "flags"[, %type[,flag_specif
地址表达式expr的取值范围如下:
当地址值是字节对齐时,其取指范围为−255B~255B;
当地址值是字对齐时,其取指范围为−1020B~1020B。
ARM伪指令——小范围的地址读取
ADR伪指令将基于PC相对偏移的地址值或基于寄存器相对偏移的 地址值读取到寄存器中。在汇编编译器编译源程序时,ADR伪指令被 编译器替换成一条合适的指令。通常,编译器用一条ADD指令或SUB 指令来实现该ADR伪指令的功能,若不能用一条指令实现,则产生错 误,编译失败。
c语言 写arm汇编
c语言写arm汇编
在C语言中嵌入ARM汇编代码可以使用内联汇编。
以下是一个简单的示例,展示如何在C语言中嵌入ARM汇编代码:
```c
#include <stdio.h>
int main() {
int num = 10;
__asm__("add %0, %0, #5;" : "=r"(num));
printf("num = %d\n", num);
return 0;
}
```
在这个示例中,我们使用`__asm__`关键字来嵌入ARM汇编代码。
该代码将变量`num`的值增加5。
在汇编代码中,`%0`表示第一个输入操作数,`#5`表示立即数5。
在C语言中嵌入ARM汇编代码时,需要使用特定的语法来指定输入和输出操作数。
在这个示例中,我们使用`"=r"(num)`来指定`num`为输出操作数,并将其存储在寄存器中。
需要注意的是,内联汇编是一种低级编程技术,需要谨慎使用。
在使用内联汇编时,需要了解ARM架构和汇编语言的相关知识,以避免出
现错误和潜在的安全问题。
arm汇编语言程序设计步骤
arm汇编语言程序设计步骤ARM汇编语言程序设计步骤一、概述ARM汇编语言是一种基于ARM架构的低级语言,用于编写底层程序和驱动程序。
在进行ARM汇编语言程序设计时,我们需要按照以下步骤进行。
二、确定需求在开始编写ARM汇编语言程序之前,我们需要明确程序的需求和目标。
这包括确定程序要实现的功能、输入和输出的格式、程序的性能要求等。
三、了解ARM架构在编写ARM汇编语言程序之前,我们需要了解ARM架构的特点和指令集。
ARM架构是一种精简指令集计算机(RISC)架构,具有高效的指令执行和低能耗的特点。
四、选择开发工具在进行ARM汇编语言程序设计时,我们需要选择合适的开发工具。
常用的开发工具包括ARM汇编器、调试器和模拟器。
这些工具可以帮助我们编译、调试和运行ARM汇编语言程序。
五、编写程序在编写ARM汇编语言程序时,我们需要按照以下步骤进行:1. 定义数据段:首先,我们需要定义程序的数据段。
数据段用于存储程序中使用的变量和常量。
在ARM汇编语言中,我们可以使用伪指令来定义数据段。
2. 定义代码段:然后,我们需要定义程序的代码段。
代码段包含程序的指令和算法。
在ARM汇编语言中,我们可以使用伪指令和指令来定义代码段。
3. 编写算法:在编写ARM汇编语言程序时,我们需要根据需求编写相应的算法。
算法是程序的核心部分,用于实现程序的功能和逻辑。
4. 调用系统服务:在ARM汇编语言中,我们可以通过调用系统服务来实现一些常用的功能,如输入输出、内存管理等。
调用系统服务需要使用特定的指令和参数。
5. 进行优化:在编写ARM汇编语言程序时,我们可以进行一些优化操作,以提高程序的性能和效率。
优化操作包括减少指令数量、减少内存访问次数、合并循环等。
六、编译和调试在完成ARM汇编语言程序的编写后,我们需要进行编译和调试。
编译是将汇编语言程序转换为机器码的过程,可以使用ARM汇编器进行编译。
调试是对程序进行测试和调试的过程,可以使用调试器和模拟器进行调试。
arm常用汇编指令
arm常用汇编指令ARM的汇编指令是ARM处理器在运行时所执行的基本操作。
汇编指令是一种低级编程语言,它主要是为了直接操作硬件而设计的。
在ARM 汇编指令中,每个指令都是由一个操作码和一些操作数组成的。
操作码就是指令的类型,而操作数则是指令要操作的数据。
下面是一些常用的ARM汇编指令:1. mov指令mov指令是ARM汇编指令中最常用的指令之一。
它用来将一个数据从一个位置复制到另一个位置。
例如,下面的代码将寄存器r1中的值复制到寄存器r2中:mov r2, r12. add指令add指令用来将两个数相加并将结果存放在一个寄存器中。
例如,下面的代码将r1和r2中的值相加并将结果存放在r3中:add r3, r1, r23. sub指令sub指令用来将一个数从另一个数中减去并将结果存放在一个寄存器中。
例如,下面的代码将r2中的值从r1中减去并将结果存放在r3中:sub r3, r1, r24. cmp指令cmp指令用来比较两个数的大小。
它会将两个数相减,并将结果存放在一个特殊的寄存器中。
如果相减结果为0,表示两个数相等;如果结果为正数,表示第一个数大于第二个数;如果结果为负数,表示第一个数小于第二个数。
例如,下面的代码比较r1和r2的大小:cmp r1, r25. beq指令beq指令用来进行条件分支。
如果cmp指令的结果为0,则跳转到指定的地址。
例如,下面的代码如果r1等于r2,就跳到标号my_label处执行:beq my_label6. bne指令bne指令用来进行条件分支。
如果cmp指令的结果不为0,则跳转到指定的地址。
例如,下面的代码如果r1不等于r2,就跳到标号my_label处执行:bne my_label7. ldr指令ldr指令用来从内存中读取一个值并存放到寄存器中。
例如,下面的代码从内存地址0x100处读取一个值并存放到寄存器r1中:ldr r1, [0x100]8. str指令str指令用来将一个值存储到内存中。
ARM汇编语言程序设计
DCB
语法格式: {标号} DCB 体现式
体现式取值范围:-128~255旳数字或字符串。 DCB:“=”
Nullstring DCB “Null string”,0 ;构造一种以0结尾旳字符串
DCW(或DCWU)
语法格式: {标号} DCW(或DCWU) 体现式
DCW:半字对齐 DCWU:不严格半字对齐。 体现式取值范围:-32768~65535
SPACE objectsize
;全局旳数字变量objectsize ,为0 ;将该变量赋值为0xff ;引用该变量
statusB
GBLL statusB ;全局旳逻辑变量statusB ,为{False} SETL {TRUE} ;将该变量赋值为真
全局:作用范围为包括该变量旳源程序
LCLA、LCLL和LCLS
;包括源文件file1.s ;包括源文件file2.s ;包括源文件file3.s
伪指令
ADR ADRL LDR NOP
ADR-小范围旳地址读取伪指令
语法格式 ADR{cond} register, expr cond:可选旳指令执行条件 register:目旳寄存器 expr:基于PC或寄存器旳地址体现式,取值范围: 地址非字对齐,-255~255 地址字对齐,-1020~1020
{寄存器列表}
Context RLIST {r0-r6,r8,r10-r12,r15}
;将寄存器列表名称定义为Context ,可在ARM指令 LDM/STM中经过该名称访问寄存器列表。排列顺序无 关
数据定义伪操作
DCB DCW(DCWU) DCD(DCDU) DCFD(DCFDU) DCFS(DCFSU) SPACE MAP FIELD
arm32汇编指令手册简要
ARM32汇编指令手册简要:掌握ARM32汇编指令,轻松开发嵌入式系统在嵌入式系统开发中,ARM32汇编指令是必不可少的一部分。
ARM32汇编指令手册简要提供了ARM32汇编指令的基础知识和常用指令的详细介绍,帮助开发人员更好地掌握ARM32汇编指令,从而轻松开发嵌入式系统。
ARM32汇编指令是一种低级语言,它是由CPU直接执行的指令。
掌握ARM32汇编指令对于嵌入式系统开发人员来说非常重要。
了解ARM32汇编指令的基本结构和语法是必要的。
ARM32汇编指令的基本结构包括指令助记符、寄存器、操作数和注释。
指令助记符是指令的名称,寄存器是用来存储数据的地方,操作数是指令的参数,注释是对指令的解释说明。
ARM32汇编指令手册简要中还介绍了一些常用的指令,如MOV、ADD、SUB、CMP、B、BL等。
这些指令涵盖了ARM32汇编指令的大部分功能。
MOV指令可以将一个寄存器的值传递给另一个寄存器;ADD和SUB指令可以进行加法和减法运算;CMP指令可以比较两个值的大小;B和BL指令可以进行跳转操作。
掌握这些指令可以帮助开发人员更好地编写ARM32汇编程序。
除了介绍基本结构和常用指令外,ARM32汇编指令手册简要还介绍了一些高级指令,如LDR、STR、LDM、STM、SWI等。
这些指令可以让开发人员更加灵活地操作内存和系统调用。
例如,LDR和STR指令可以读取和写入内存中的数据;LDM和STM指令可以一次性读取或写入多个寄存器的值;SWI指令可以进行系统调用。
掌握这些高级指令可以让开发人员更加高效地编写ARM32汇编程序。
ARM32汇编指令手册简要提供了ARM32汇编指令的基础知识和常用指令的详细介绍,帮助开发人员更好地掌握ARM32汇编指令,从而轻松开发嵌入式系统。
掌握ARM32汇编指令不仅可以提高开发效率,还可以让开发人员更好地理解计算机底层原理,更加深入地了解嵌入式系统的工作原理。
ARM32汇编指令是嵌入式系统开发中必不可少的一部分。
arm11 汇编指令
arm11 汇编指令
ARM11是ARM体系结构中的一款处理器,具有多种不同版
本和配置。
以下是一些常见的ARM11汇编指令:
1. 数据传输指令:
- LDR:将数据从内存加载到寄存器中。
- STR:将寄存器中的数据存储到内存中。
- MOV:将一个寄存器中的数据移动到另一个寄存器中。
2. 算术和逻辑指令:
- ADD:将两个寄存器中的数据相加,并将结果存储到另一
个寄存器中。
- SUB:将一个寄存器中的数据减去另一个寄存器中的数据,并将结果存储到另一个寄存器中。
- AND:对两个寄存器中的数据执行逻辑与操作,并将结果
存储到另一个寄存器中。
3. 分支和跳转指令:
- B:无条件分支指令,用于无条件跳转到指定的地址。
- BEQ:条件分支指令,当前一个比较指令的结果为相等时,跳转到指定的地址。
- BL:带链接的分支指令,用于调用子程序,并将返回地址
存储到链接寄存器中。
4. 特权指令:
- MRS:将特殊寄存器的值移动到普通寄存器中。
- MSR:将普通寄存器的值移动到特殊寄存器中。
- LDM:将多个寄存器的值从内存加载到寄存器组中。
这只是ARM11汇编指令的一小部分,实际上还有很多其他的指令可以使用。
具体的指令集和用法可能会根据不同的ARM11版本和配置而有所不同。
建议参考相应的ARM11处理器的技术手册来获取具体的指令集和用法信息。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1冒泡排序的ARM汇编程序ORG 09B0HQUE:MOV R3,#50H QUE1:MOV A,R3 MOV R0,AMOV R7,#0AHCLR 00HMOV A,@R0Q12:INC R0MOV R2,ACLR CMOV 22H,@R0CJNE A,22H,Q13 SETB CQ13:MOV A,R2JC Q11SETB 00HXCH A,@R0DEC R0XCH A,@R0INC R0Q11:MOV A,@R0 DJNZ R7,Q12JB 00H,QUE1SJMP $END2 ARM汇编希尔排序法对10个带符号数进行排序Code:void shell(int src[],int l,int r){int ih;r++;for(ih=1;ih<(r-l)/9;ih=ih*3+1);//eax,ih//ebx,il//ecx,ir//edx,cmps_asm{push eaxpush ebxpush ecxpush edxpush esipush edi;貌似这堆进栈用处不大哎mov edi,srcmov eax,dword ptr [ih]LIH:cmp eax,0jna EXIHmov ebx,eaxdec ebxLLH:cmp ebx,dword ptr [r]jnb EXLLHmov ecx,ebxmov edx,dword ptr [edi+ecx*4]LCMP:mov esi,eaxdec esicmp ecx,esijna EXCMPpush ecxsub ecx,eaxcmp edx,dword ptr [edi+ecx*4] pop ecxjnb EXCMPpush ebxpush ecxsub ecx,eaxmov ebx,dword ptr [edi+ecx*4] pop ecxmov dword ptr [edi+ecx*4],ebx pop ebxsub ecx,eaxjmp LCMPEXCMP:mov dword ptr [edi+ecx*4],edx inc ebxjmp LLHEXLLH:push ecxmov ecx,3push edxcdqidiv ecxpop edxpop ecxjmp LIHEXIH:pop edipop esipop edxpop ecxpop ebxpop eax}}351单片机C语言对流水灯编程,用定时中断做#include<reg52.h>define uchar unsigned charuchar m=0,i=0;void main(){ TMOD|=0x01; //定时器0工作方式为1TH0=(65536-50000)/256; //装初值TL0=(65536-50000)%256; EA=1; //开总中断ET0=1; //开定时器中断TR0=1; //开启定时器while(1); //等待中断}void timer0() interrupt 1{TH0=(65536-50000)/256;TL0=(65536-50000)%256; m++ ;if(m==5) //12M晶振定时5*50MS=250MS{m=0;P1=~(0X01<<i);//P1接8个LEDif(++i==8) i=0;}}4单片机编程C语言和汇编都可以。
外部中断int0口控制p2.3口得报警器。
中断信号是开关量,就是行程开关。
本程序晶振为:12MHZ,报警输出频率为:100HZORG 0000H LJMP MAIN ORG 0003H ;INT0中断入口LJMP XC_INT0ORG 000BH ;T0中断入口LJMP BJ_T0ORG 0030HMAIN:MOV TMOD,#01HMOV TH0,#0ECH ;定时初值,定时值为5msMOV TL0,#78HSETB EASETB EX0SETB ET0CLR IT0SJMP $;===int0外部中断子程序===XC_INT0:PUSH ACCPUSH PSWSETB TR0POP PSWPOP ACCRETI;===报警频率产生T0中断===BJ_T0:CPL p2.3MOV TH0,#0ECHMOV TL0,#78HRETI5单片机外部中断的编程设计单片机程序,基于T0用定时中断设计秒表,秒计数结果在数码管显示,用外部中断INT0(边沿触发方式)对秒计数结果进行清零,用P3.0对秒计数进行启动和停止控制。
T0定时中断50毫秒,进行20次中断得到1秒的定时,秒计数结果送P1口进行LED显示,将外部中断设置成边沿触发方式。
/***********************************************/#include<reg51.h>sbit shiwei=P2^0;//定义接口sbit gewei=P2^1;/*********************************************/unsigned char code table[]={//数码显示表0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f};/*******************************************/void msdelay()//5 ms 延时{int x,y;for(x=(65536-15)%256;x;x--){for(y=(65536-15)/256;y;y--);}}/***************************************//**************************************/void init()//初始化{TMOD=0x11;PX0=1;TH0=(65535-50)/256;TL0=(65535-50)%256;TH1=(65535-100)/256;TL1=(65535-100)%256;EX0=1;ET0=1;ET1=1;EA=1;TR1=1;}/*****************************************/ unsigned char passtime=0;//全局变量unsigned char timecount=0;/*****************************************/main(){unsigned char count;count=0;init();while(P3^0!=1);msdelay();if(P3^0==1)//确定开始或者结束{count++;if(count%2){TR0=1;}else{TR0=0;}}}void clear() interrupt 0//清零{TR0=0;timecount=0;passtime=0;}void timer() interrupt 2//50ms 定时{timecount++;if(timecount==20){timecount=0;passtime++;//50*20=1s}TH0=(65535-50)/256;TL0=(65535-50)%256;TR0=1;}void displaytimer() interrupt 2//用于数码管的两位显示,十位和各位{TH1=(65535-100)/256;TL1=(65535-100)%256;shiwei=0;//动态显示,其中P2.0=0十位选通P2.1=各位选通gewei=1;P0=table[passtime/10];//十位msdelay();msdelay();msdelay();shiwei=1;gewei=0;P0=table[passtime%10];//各位msdelay();msdelay();msdelay();TR1=1;}6. 80c51单片机很简单的中断编程试编写一段对中断系统初始化的程序,使之允许INRO(上面有一横),INT1(上面有一横),T0,串行口中断,且使T0中断为高优先级。
ORG 0000HLJMP STARTORG 0003HLJMP _X0_INTORG 000BHLJMP _T0_INTORG 0013HLJMP _X1_INTORG 001BHLJMP _T1_INTORG 0023HLJMP _S_INTSTART:MOV IE, #10010111BMOV IP, #00000010B.........._X0_INT:..........RETI....................END7.利用外部输入中断设计一个应用系统,实时显示P3.3引脚上出现的负跳变脉冲的个数。
用51单片机ORG 0000HAJMP STARTORG 0013HAJMP INT1ORG 0100HSTART:SETB EA ;总中断允许SETB IT1 ;外部中断1允许MOV R0,#00HHERE:SJMP HEREINT1:INC R0RETIEND8.基于单片机的交通信号灯模拟控制系统设计设计内容及要求:1、硬件设计单片机主电路、交通灯接口电路、LED数码管显示电路,键盘控制电路。
2、软件设计系统流程图、各功能程序设计环境:Protel99SE 、W A VE仿真环境、H51/L仿真器、单片机多功能实验箱实现目标:(1)正常情况下交叉路口的轮流通行(主道3个LED红、黄、绿控制直行,支道3个LED红、黄、绿,切换时间自行设定);(2)特殊情况控制通行方式控制,用按键开关K1控制主道通行,支道禁行,K2控制支道通行,主道禁行,特殊情况控制通行放行。
(3)有紧急情况时用按键开关K0控制两道均为红灯;(4)4位LED数码管能够显示双直行方向绿灯和红灯的等待时间。
2位LED数码管显示程序:P0口接数码管段,P2口接数码管位。
P3口接键盘,P1口接发光二极管ORG 0000HLJMP MAINORG 0003HLJMP INT0PORG 000BHLJMP T0INTORG 0013HLJMP INT1PORG 001BHLJMP CTC1ORG 0100HMAIN: LCALL CSHIH ;初始化LOOP: LCALL TONGX ;通行路口LCALL H_BCD2 ;计算(1位HEX转换为2位BCD码)LCALL YIMA ;译码LCALL LED4W ;显示CLR 00HJNB 00H,$DJNZ R6,LOOPMOV R6,#100JNB 10H,LOOP1 ;启动特殊功能K0JB 10H,$LOOP1: JNB 11H,LOOP2 ;启动特殊功能K1 JB 11H,$NOPLOOP2: JNB 12H,LOOP3 ;启动特殊功能K2 JB 12H,$NOPLOOP3: DJNZ TIME,LOOPSETB 02HSJMP LOOPTONGX: JB 01H,DONGXJB 02H,HUANG1MOV P1,#21HSJMP TX_OUTHUANG1: MOV P1,#22HMOV TIME,#1DJNZ R5,TX_OUTMOV R5,200CLR 02HCPL 01HMOV TIME,#15SJMP TX_OUTDONGX: JB 02H,HUANG2MOV P1,#0CHSJMP TX_OUTHUANG2: MOV P1,#14HMOV TIME,#1DJNZ R5,TX_OUTMOV R5,200CLR 02HCPL 01HMOV TIME,#15TX_OUT: RETLED4W: MOV A,XWEIMOV B,#3MUL ABMOV DPTR,#LED4TJMP @A+DPTRLED4T: LJMP LD4W1LJMP LD4W2LJMP LD4W3LJMP LD4W4LD4W1: MOV LEDD,MLED1MOV LEDW,#1INC XWEISJMP LED4WELD4W2: MOV LEDD,MLED2MOV LEDW,#2INC XWEISJMP LED4WELD4W3: MOV LEDD,MLED3MOV LEDW,#4INC XWEISJMP LED4WELD4W4: MOV LEDD,MLED4MOV LEDW,#8MOV XWEI,#0LED4WE: RETYIMA: MOV R0,#BLED1 ;四位LEDMOV R1,#MLED1MOV R7,#2MOV DPTR,#YIMTABYIMA1: MOV A,@R0MOVC A,@A+DPTRMOV @R1,AINC R0INC R1DJNZ R7,YIMA1RETYIMTAB: DB 3FH,06H,5BH,4FH,66H ;0,1,2,3,4 DB 6DH,7DH,07H,7FH,6FH ;5,6,7,8,9 CSHIH: MOV TIME,#15MOV XWEI,#0MOV LEDD,#0MOV LEDW,#0MOV R6,#100 ;1秒延时MOV R5,#200 ;2秒延时MOV P1,#21HMOV 20H,#0MOV 22H,#0MOV TMOD,#61H ;T0方式1MOV TTH0,#0D8H ;10msMOV TTL0,#0F0HMOV TL0,TTL0MOV TH0,TTH0MOV TL1,#0FFHMOV TH1,#0FFHMOV IE,#8FHSETB TR0SETB TR1MOV BLED1,#0MOV BLED2,#0MOV MLED3,#0MOV MLED4,#0RETH_BCD2: MOV A,TIMEMOV B,#10DIV ABMOV BLED2,AMOV BLED1,BMOV MLED3,#0MOV MLED4,#0RETT0INT: MOV TL0,TTL0 MOV TH0,TTH0SETB 00HRETIINT0P: CPL 10HSETB P1.2CLR P1.1CLR P1.0SETB P1.5CLR P1.4CLR P1.3RETIINT1P: CPL 11HCLR P1.2CLR P1.1SETB P1.0SETB P1.5CLR P1.4CLR P1.3RETICTC1: CPL 12HMOV P1,#0CHRETIBIAOZDA TA 20H ;标志:.0定时到。