L298N直流步进电机驱动步进电机程序
电机驱动l298n原理

电机驱动l298n原理
L298N是一种常见的电机驱动器,可用于控制直流电机或步
进电机。
它使用了H桥电路的原理。
H桥电路是由四个开关(晶体管或MOSFET)组成的,它们
按特定的方式连接在一起,形成了一个桥形结构。
这种结构可以控制电流的流向和电机的旋转方向。
L298N中的H桥电路分为两个部分,分别用于控制电机的两
个端口。
每个部分都由一个上半H桥和一个下半H桥组成。
当上半H桥的两个开关关闭时,与电机连接的两个端口之间
的电流会开始流动,电机会顺时针旋转。
当下半H桥的两个
开关关闭时,电流改变方向,电机会逆时针旋转。
L298N通过控制这些开关的状态来实现电机的速度和方向控制。
它具有使能信号(ENA, ENB)和方向信号(IN1, IN2,
IN3, IN4)的输入引脚,通过改变这些输入信号的状态,可以
控制电机的转速和转向。
例如,当ENA引脚为高电平,IN1为高电平,IN2为低电平时,上半H桥的两个开关会关闭,电流会从ENA引脚流入
IN1引脚,然后流入电机的一个端口,然后返回到IN2引脚,
最后回到GND。
这样,电机会以某个速度顺时针旋转。
通过改变ENA、IN1和IN2的电平状态,可以控制电机的转
速和方向。
类似地,通过控制ENB、IN3和IN4的电平状态,
可以控制电机的另一个端口。
总之,L298N电机驱动器采用H桥电路的原理,通过控制开关的状态来控制电流的流向和电机的转速和方向。
L298N步进电机驱动器使用说明
L298N电机驱动器使用说明兴创科技L298N是ST公司生产的一种高电压、大电流电机驱动芯片。
该芯片采用15脚封装。
主要特点是:工作电压高,最高工作电压可达46V;输出电流大,瞬间峰值电流可达3A,持续工作电流为2A;额定功率25W。
内含两个H桥的高电压大电流全桥式驱动器,可以用来驱动直流电动机和步进电动机、继电器线圈等感性负载;采用标准逻辑电平信号控制;具有两个使能控制端,在不受输入信号影响的情况下允许或禁止器件工作有一个逻辑电源输入端,使内部逻辑电路部分在低电压下工作;可以外接检测电阻,将变化量反馈给控制电路。
使用L298N芯片驱动电机,该芯片可以驱动一台两相步进电机或四相步进电机,也可以驱动两台直流电机。
宝贝简介:一、尺寸:65mmX41mm X28mm二、主要芯片:L298N、光电耦合器三、工作电压:控制信号直流~;驱动电机电压5~30V四、可驱动直流(5~30V之间电压的电机)五、最大输出电流2A (瞬间峰值电流3A)六、最大输出功率25W七、特点:1、具有信号指示2、转速可调3、抗干扰能力强4、具有续流保护5、可单独控制两台直流电机6、可单独控制一台步进电机7、PWM脉宽平滑调速(可使用PWM信号对直流电机调速)8、可实现正反转9、采用光电隔离实例一:步进电机的控制实例步进电机是数字控制电机,它将脉冲信号转变成角位移,即给一个脉冲信号,步进电机就转动一个角度,因此非常适合于单片机控制。
步进电机可分为反应式步进电机(简称VR)、永磁式步进电机(简称PM)和混合式步进电机(简称HB)。
一、步进电机最大特点是:1、它是通过输入脉冲信号来进行控制的。
2、电机的总转动角度由输入脉冲数决定。
3、电机的转速由脉冲信号频率决定。
二、步进电机的驱动电路根据控制信号工作,控制信号由单片机产生。
(或者其他信号源) 三、基本原理作用如下:步进电机控制:将IN1,IN2和IN3,IN4两对引脚分别接入单片机的某个端口,输出连续的脉冲信号。
L298N的详细资料驱动直流电机和步进电机

L298N的详细资料驱动直流电机和步进电机电机驱动电路;电机转速控制电路(PWM信号)主要采用L298N,通过单片机的I/O输入改变芯片控制端的电平,即可以对电机进行正反转,停止的操作,输入引脚与输出引脚的逻辑关系图为驱动原理图--------------------------------------------------------L298N电机驱动模块图•••1.1 实物图••1.2 原理图•••1.3 各种电机实物接线图•••1.4 各种电机原理图•••1.5 模块接口说明•••L298N电机驱动模块图1.1 实物图正面背面1.2 原理图1.3 各种电机实物接线图直流电机实物接线图4相步进电机实物接线图3相步进电机实物接线图1.4各种电机原理图直流电机原理图步进电机原理图1.5 模块接口说明+5V:芯片电压5V。
VCC:电机电压,最大可接50V。
GND:共地接法。
A-~D-:输出端,接电机。
A~D+ :为步进电机公共端,模块上接了VCC。
EN1、EN2:高电平有效,EN1、EN2分别为IN1和IN2、IN3和IN4的使能端。
IN1~ IN4:输入端,输入端电平和输出端电平是对应的。
1和15和8引脚直接接地,4管脚VS接2.5到46的电压,它是用来驱动电机的,9引脚是用来接4.5到7V的电压的,它是用来驱动L298芯片的,记住,L298需要从外部接两个电压,一个是给电机的,另一个给L298芯片的6和11引脚是它的使能端,一个使能端控制一个电机,至于那个控制那个你自己焊接,你可以把它理解为总开关,只有当它们都是高电平的时候两个电机才有可能工作,5,7,10,12是298的信号输入端和单片机的IO口相连,2,3,13,14是输出端,输入5和7控制输出2和3, 输入的10,12控制输出的13,14L298N型驱动器的原理及应用L298N是SGS公司的产品,内部包含4通道逻辑驱动电路。
是一种二相和四相电机的专用驱动器,即内含二个H桥的高电压大电流双全桥式驱动器,接收标准TTL逻辑电平信号,可驱动46V、2A以下的电机。
l298n驱动电机的工作原理_L298N驱动步进电机程序

l298n驱动电机的工作原理_L298N驱动步进电机程序步进电机简介步进电动机是一种将电脉冲信号转换成角位移或线位移的机电元件。
步进电动机的输入量是脉冲序列,输出量则为相应的增量位移或步进运动。
正常运动情况下,它每转一周具有固定的步数;做连续步进运动时,其旋转转速与输入脉冲的频率保持严格的对应关系,不受电压波动和负载变化的影响。
由于步进电动机能直接接受数字量的控制,所以特别适宜采用微机进行控制。
(一)步进电机的种类目前常用的有三种步进电动机:(1)反应式步进电动机(VR)反应式步进电动机结构简单,生产成本低,步距角小;但动态性能差。
(2)永磁式步进电动机(PM)永磁式步进电动机出力大,动态性能好;但步距角大。
(3)混合式步进电动机(HB)混合式步进电动机综合了反应式、永磁式步进电动机两者的优点,它的步距角小,出力大,动态性能好,是目前性能最高的步进电动机。
它有时也称作永磁感应子式步进电动机。
(二)步进电动机的工作原理图X1三相反应式步进电动机结构示意图1定子2转子3定子绕组图x1是最常见的三相反应式步进电动机的剖面示意图。
电机的定子上有六个均布的磁极,其夹角是60。
各磁极上套有线圈,按图1连成A、B、C三相绕组。
转子上均布40个小齿。
所以每个齿的齿距为E=360/40=9,而定子每个磁极的极弧上也有5个小齿,且定子和转子的齿距和齿宽均相同。
由于定子和转子的小齿数目分别是30和40,其比值是一分数,这就产生了所谓的齿错位的情况。
若以A相磁极小齿和转子的小齿对齐,如图,那么B相和C相磁极的齿就会分别和转子齿相错三分之一的齿距,即3。
因此,B、C极下的磁阻比A磁极下的磁阻大。
若给B相通电,B相绕组产生定子磁场,其磁力线穿越B相。
L298N驱动步进电机程序(带PWM)
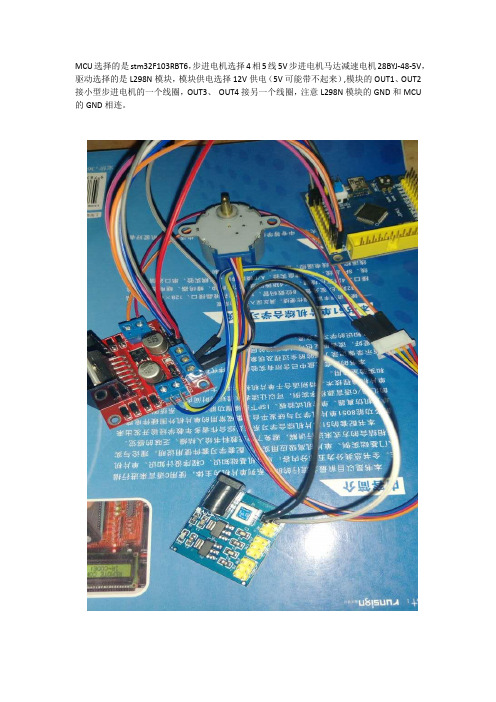
MCU选择的是stm32F103RBT6,步进电机选择4相5线5V步进电机马达减速电机28BYJ-48-5V,驱动选择的是L298N模块,模块供电选择12V供电(5V可能带不起来),模块的OUT1、OUT2接小型步进电机的一个线圈,OUT3、OUT4接另一个线圈,注意L298N模块的GND和MCU 的GND相连。
*******************************************************************************步进电机头文件Stepmotor.h#ifndef __MOTOR_H#define __MOTOR_Hvoid Motor_Init(void);void Motor_Go(void);#endif源文件Stepmotor.c#include "stepmotor.h"#include "sys.h"void Motor_Init(void){GPIO_InitTypeDef GPIO_InitStructure;RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);//使能PB端口时钟GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3|GPIO_Pin_5| GPIO_Pin_7| GPIO_Pin_8;//PB3接IN1 PB5接IN2 PB7接IN3 PB8接IN4GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽输出GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;//IO口速度为50MHzGPIO_Init(GPIOB, &GPIO_InitStructure);//GPIO_ResetBits(GPIOB,GPIO_Pin_3|GPIO_Pin_5| GPIO_Pin_7| GPIO_Pin_8);******************************************************************************* PWM调制头文件mypwm.h#ifndef __TIMER_H#define __TIMER_H#include "sys.h"void MYTIMER3_Init(u16 arr,u16 psc);void TIM3_PWM_Init(u16 arr,u16 psc);#endif源文件mypwm.c#include " mypwm.h#include "stm32f10x.h"void TIM3_PWM_Init(u16 arr,u16 psc){TIM_OCInitTypeDef TIM_OCInitTypestucture;TIM_TimeBaseInitTypeDef TIM_TimeBaseInitstucture;GPIO_InitTypeDef GPIO_InitStructure;RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3,ENABLE);//使能定时器时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC|RCC_APB2Periph_AFIO, ENABLE);//使能PC端口,复用时钟GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6|GPIO_Pin_7;//PC6接ENA PC7接ENB GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //推挽复用输出GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;//IO口速度为50MHz GPIO_Init(GPIOC, &GPIO_InitStructure);//GPIO_PinRemapConfig(GPIO_FullRemap_TIM3,ENABLE);//TIM_TimeBaseInitstucture.TIM_Period=arr;//自动装载值TIM_TimeBaseInitstucture.TIM_Prescaler=psc;//预分频值TIM_TimeBaseInitstucture.TIM_CounterMode=TIM_CounterMode_Up;//计数模式向上TIM_TimeBaseInitstucture.TIM_ClockDivision=0 ;//TIM_TimeBaseInit(TIM3,&TIM_TimeBaseInitstucture);TIM_OCInitTypestucture.TIM_OCMode=TIM_OCMode_PWM1 ;//模式1TIM_OCInitTypestucture.TIM_OCPolarity=TIM_OCPolarity_High;//高电平TIM_OCInitTypestucture.TIM_Pulse=599;//改变数值调节占空比TIM_OCInitTypestucture.TIM_OutputState=TIM_OutputState_Enable;//使能TIM_OC1Init(TIM3,&TIM_OCInitTypestucture);TIM_OC1PreloadConfig(TIM3,TIM_OCPreload_Enable);//使能预装载TIM_OCInitTypestucture.TIM_OCMode=TIM_OCMode_PWM1 ;//模式1TIM_OCInitTypestucture.TIM_OCPolarity=TIM_OCPolarity_High;//高电平TIM_OCInitTypestucture.TIM_Pulse=599;TIM_OCInitTypestucture.TIM_OutputState=TIM_OutputState_Enable;//使能TIM_OC2Init(TIM3,&TIM_OCInitTypestucture);TIM_OC2PreloadConfig(TIM3,TIM_OCPreload_Enable);//使能预装载TIM_Cmd(TIM3,ENABLE);//使能定时器}*******************************************************************************主函数#include "stepmotor.h"#include "stm32f10x.h"#include "delay.h"#include "timer.h"int main(){delay_init();Motor_Init();TIM3_PWM_Init(999,71);// 72M/(71+1)(999+1)=1K hzwhile(1) //正转{GPIO_SetBits(GPIOB,GPIO_Pin_5| GPIO_Pin_7| GPIO_Pin_8);//0111GPIO_ResetBits(GPIOB,GPIO_Pin_3);delay_ms(4);GPIO_SetBits(GPIOB,GPIO_Pin_3| GPIO_Pin_7| GPIO_Pin_8);//1011GPIO_ResetBits(GPIOB,GPIO_Pin_5);delay_ms(4);GPIO_SetBits(GPIOB,GPIO_Pin_3| GPIO_Pin_5| GPIO_Pin_8);//1101GPIO_ResetBits(GPIOB,GPIO_Pin_7);delay_ms(4);GPIO_SetBits(GPIOB,GPIO_Pin_3| GPIO_Pin_5| GPIO_Pin_7);//1110GPIO_ResetBits(GPIOB,GPIO_Pin_8);delay_ms(4);}}。
L298N电机驱动器_共地说明书
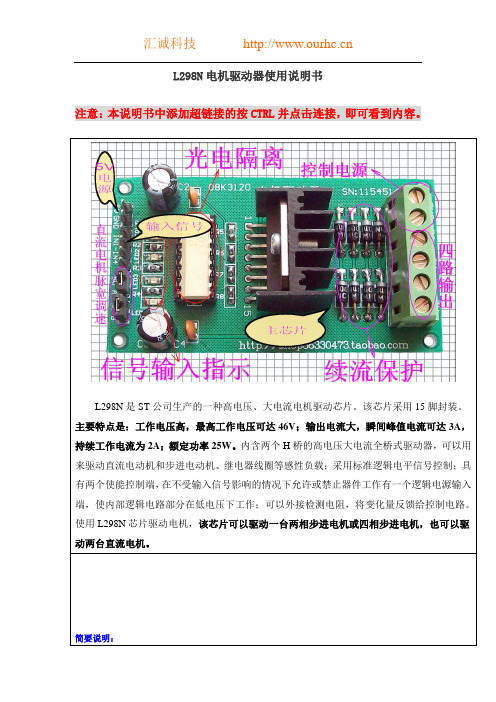
L298N电机驱动器使用说明书注意:本说明书中添加超链接的按CTRL并点击连接,即可看到内容。
实例一:步进电机的控制实例步进电机是数字控制电机,它将脉冲信号转变成角位移,即给一个脉冲信号,步进电机就转动一个角度,因此非常适合于单片机控制。
步进电机可分为反应式步进电机(简称VR)、永磁式步进电机(简称PM)和混合式步进电机(简称HB)。
一、步进电机最大特点是:1、它是通过输入脉冲信号来进行控制的。
2、电机的总转动角度由输入脉冲数决定。
3、电机的转速由脉冲信号频率决定。
二、步进电机的驱动电路根据控制信号工作,控制信号由单片机产生。
(或者其他信号源)三、基本原理作用如下: 两相四拍工作模式时序图:(1)控制换相顺序1、通电换相这一过程称为脉冲分配。
例如:1、两相四线步进电机的四拍工作方式,其各相通电顺序为(A-B-A ’-B ’)通电控制脉冲必须严格按照这一顺序分别控制A,B 相的通断。
)2、两相四线步进电机的四拍工作方式,其各相通电顺序为: (A -AB -B -BA ’-A ’-A ’B ’-B ’-B ’依次循环。
(出于对力矩、平稳、噪音及减少角度等方面考虑。
往往采用八拍工作方式)(2)控制步进电机的转向如果给定工作方式正序换相通电,步进电机正转,如果按反序通电换相,则电机就反转。
如:正转通电顺序是:(A-B-A’-B’依次循环。
)则反转的通电顺序是:(B‘-A’-B-A依次循环。
)参考下例:(3)控制步进电机的速度如果给步进电机发一个控制脉冲,它就转一步,再发一个脉冲,它会再转一步。
两个脉冲的间隔越短,步进电机就转得越快。
调整单片机发出的脉冲频率,就可以对步进电机进行调速。
(注意:如果脉冲频率的速度大于了电机的反应速度,那么步进电机将会出现失步现象)。
参考下例:(4)四相电机的控制程序以下为参考程序:实例二:直流电机的控制实例使用直流/步进两用驱动器可以驱动两台直流电机。
分别为M1和M2。
引脚A,B可用于输入PWM脉宽调制信号对电机进行调速控制。
L298N(L297+L298N)电机驱动器使用说明

用 PWM 信号对
1、具有信号指示 2、转速可调 3、抗干扰能力强 4、具有续流保护 5、可单独控制两台直流电机 6、可单独控制一台步进电机 7、PWM 脉宽平滑调速(可使 直流电机调速) 8、可实现正反转 9、采用光电隔离
控制步进电机:
实例一:步进电机的控制实例
步进电机是数字控制电机,它将脉冲信号转变成角位移,即给一 个脉冲信号,步进电机就转动一个角度,因此非常适合于单片机控制。 步进电机可分为反应式步进电机(简称 VR)、永磁式步进电机(简 称 PM)和混合式步进电机(简称 HB)。 一、步进电机最大特点是: 1、它是通过输入脉冲信号来进行控制的。 2、电机的总转动角度由输入脉冲数决定。 3、电机的转速由脉冲信号频率决定。 二、步进电机的驱动电路 根据控制信号工作,控制信号(ENA ENB)由单片机产生。(或者其他 信号源) 三、控制步进电机的速度 如果给步进电机发一个控制脉冲,它就转一步,再发一个脉冲,它会 再转一步。两个脉冲的间隔越短,步进电机就转得越快。调整单片机
将短接帽短接)实现电机正反转就更容易了,输入信号端 IN1 接高电
平输入端 IN2 接低电平,电机 M1 正转。(如果信号端 IN1 接低电平,
IN2 接高电平,电机 M1 反转。)控制另一台电机是同样的方式,输入
信号端 IN3 接高电平,输入端 IN4 接低电平,电机 M2 正转。(反之
则反转),PWM 信号端 A 控制 M1 调速,PWM 信号端 B 控制 M2 调
QQ:1035573910.
采用 15 脚封装。主要特点是:工作电压高,最高工作电压可达 46V;
输出电流大,瞬间峰值电流可达 3A,持续工作电流为 2A;最大功率 25W。内含两个 H 桥的高电压大电流全桥式驱动器,可以用来驱动直 流电动机和步进电动机、继电器线圈等感性负载;采用标准逻辑电平 信号控制;具有两个使能控制端,在不受输入信号影响的情况下允许 或禁止器件工作有一个逻辑电源输入端,使内部逻辑电路部分在低电 压下工作;可以外接检测电阻,将变化量反馈给控制电路。使用 L298N 芯片驱动电机,该芯片可以驱动一台两相步进电机或四相步进电机, 也可以驱动两台直流电机,是智能小车必备。
L298N电机驱动使用说明
对于直流电机调速,我们也可以运用使能端,把 PWM 波通入使能端, 根据占空比的不同,我们可以得到不同的速度(具体参考我们所给的 51 程序) 注意事项: 1.如果接入的电压超过 16V ,,自己给模块 VCC5 端通入 5V 电压, 并且把 5V 使能跳帽拿下。 2.打开开关前检查正负极有无接错,如果接错电源指示灯是不会亮 的。 3.驱动板上有个 VCC 字样的插口,我们已经用跳帽封住,这个接口 是提供电源电压的,并不是提供 5V 输出的,请勿接错。
立
z++;
if(z==4)z=0;
}
break;
case 2:
angle = angle*5/9; //每转一下 1.8 度
for(i=0;i<angle;i++){
P1 = STEP_TABLE2[k];
for(y=speed;y>0;y--); //延时一点时间,让电机内的磁场能够
建立
k++;
if(k==4)k=0;
}
break;
default: break;
}
}
void main(void) {
while(1){ turnangle(180000,2,205); delay(5000); turnangle(72000,2,300); delay(5000); turnangle(252000,1,205); delay(5000);
}
void time0_int() interrupt 1 using 1 {
TR0=0; TH0=0xF4; TL0=0x48; MA++; if(MA< SpeedA){
ENA = 1; } else ENA = 0; if(MA == 40){
L298N的详细资料驱动直流电机和步进电机(最全版)大总结

L298N的详细资料驱动直流电机和步进电机电机驱动电路;电机转速控制电路(PWM信号)主要采用L298N,通过单片机的I/O输入改变芯片控制端的电平,即可以对电机进行正反转,停止的操作,输入引脚与输出引脚的逻辑关系图为驱动原理图L298N电机驱动模块图•••1.1 实物图••1.2 原理图•••1.3 各种电机实物接线图•••1.4 各种电机原理图•••1.5 模块接口说明•••L298N电机驱动模块图1.1 实物图正面背面1.2 原理图1.3 各种电机实物接线图直流电机实物接线图4相步进电机实物接线图3相步进电机实物接线图1.4各种电机原理图直流电机原理图步进电机原理图1.5 模块接口说明+5V:芯片电压5V。
VCC:电机电压,最大可接50V。
GND:共地接法。
A-~D-:输出端,接电机。
A~D+ :为步进电机公共端,模块上接了VCC。
EN1、EN2:高电平有效,EN1、EN2分别为IN1和IN2、IN3和IN4的使能端。
IN1~ IN4:输入端,输入端电平和输出端电平是对应的。
1和15和8引脚直接接地,4管脚VS接2.5到46的电压,它是用来驱动电机的,9引脚是用来接4.5到7V的电压的,它是用来驱动L298芯片的,记住,L298需要从外部接两个电压,一个是给电机的,另一个给L298芯片的6和11引脚是它的使能端,一个使能端控制一个电机,至于那个控制那个你自己焊接,你可以把它理解为总开关,只有当它们都是高电平的时候两个电机才有可能工作,5,7,10,12是298的信号输入端和单片机的IO口相连,2,3,13,14是输出端,输入5和7控制输出2和3, 输入的10,12控制输出的13,14L298N型驱动器的原理及应用L298N是SGS公司的产品,内部包含4通道逻辑驱动电路。
是一种二相和四相电机的专用驱动器,即内含二个H桥的高电压大电流双全桥式驱动器,接收标准TTL逻辑电平信号,可驱动46V、2A以下的电机。
l298n驱动电路
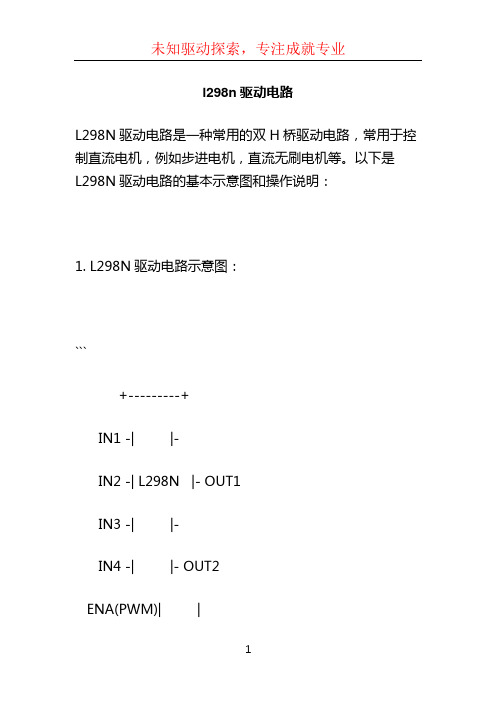
l298n驱动电路L298N驱动电路是一种常用的双H桥驱动电路,常用于控制直流电机,例如步进电机,直流无刷电机等。
以下是L298N驱动电路的基本示意图和操作说明:1. L298N驱动电路示意图:```+---------+IN1 -| |-IN2 -| L298N |- OUT1IN3 -| |-IN4 -| |- OUT2ENA(PWM)| |-| |+---------+```- IN1 ~ IN4:控制输入端,控制电机的转向和速度。
- OUT1 ~ OUT2:电机输出端。
- ENA:使能控制输入端,可以通过PWM调节电机的速度。
2. 操作说明:- 在控制输入端(IN1~IN4)中,通过控制高低电平来控制电机的转向,以下是一些常用的输入组合:- IN1=HIGH, IN2=LOW:电机正转。
- IN1=LOW, IN2=HIGH:电机反转。
- IN1=HIGH, IN2=HIGH:电机刹车。
- IN1=LOW, IN2=LOW:电机停止。
- 如果需要控制电机的速度,在ENA输入端接入一个PWM信号,通过调节PWM的占空比来控制电机的速度。
- 根据电机的额定电压和电流,选择合适的电源电压供电给L298N驱动芯片。
- 连接电机到OUT1和OUT2端口,通过控制输入端的电平来控制电机的转向和速度。
- 注意:在接线之前,确保所有电路和电源都已正确连接,以避免损坏电机和其他电子元件。
总结:L298N驱动电路是一种常用的双H桥驱动电路,通过控制输入端的高低电平来控制电机的转向和速度,可以通过ENA端口接入PWM信号来控制电机的速度。
L298N步进电机驱动器使用说明
L298N电机驱动器使用说明兴创科技L298N是ST公司生产的一种高电压、大电流电机驱动芯片。
该芯片采用15脚封装。
主要特点是:工作电压高,最高工作电压可达46V;输出电流大,瞬间峰值电流可达3A,持续工作电流为2A;额定功率25W。
内含两个H桥的高电压大电流全桥式驱动器,可以用来驱动直流电动机和步进电动机、继电器线圈等感性负载;采用标准逻辑电平信号控制;具有两个使能控制端,在不受输入信号影响的情况下允许或禁止器件工作有一个逻辑电源输入端,使内部逻辑电路部分在低电压下工作;可以外接检测电阻,将变化量反馈给控制电路。
使用L298N芯片驱动电机,该芯片可以驱动一台两相步进电机或四相步进电机,也可以驱动两台直流电机。
宝贝简介:一、尺寸:65mmX41mm X28mm二、主要芯片:L298N、光电耦合器三、工作电压:控制信号直流4.5~5.5V;驱动电机电压5~30V四、可驱动直流(5~30V之间电压的电机)五、最大输出电流2A (瞬间峰值电流3A)六、最大输出功率25W七、特点:1、具有信号指示2、转速可调3、抗干扰能力强4、具有续流保护5、可单独控制两台直流电机6、可单独控制一台步进电机7、PWM脉宽平滑调速(可使用PWM信号对直流电机调速)8、可实现正反转9、采用光电隔离实例一:步进电机的控制实例步进电机是数字控制电机,它将脉冲信号转变成角位移,即给一个脉冲信号,步进电机就转动一个角度,因此非常适合于单片机控制。
步进电机可分为反应式步进电机(简称VR)、永磁式步进电机(简称PM)和混合式步进电机(简称HB)。
一、步进电机最大特点是:1、它是通过输入脉冲信号来进行控制的。
2、电机的总转动角度由输入脉冲数决定。
3、电机的转速由脉冲信号频率决定。
二、步进电机的驱动电路根据控制信号工作,控制信号由单片机产生。
(或者其他信号源) 三、基本原理作用如下:步进电机控制:将IN1,IN2和IN3,IN4两对引脚分别接入单片机的某个端口,输出连续的脉冲信号。
L298N步进电机驱动器使用说明
L298N电机驱动器使用说明兴创科技是ST公司生产的一种高电压、大电流电机驱动芯片。
该芯片采用15脚封装。
主要特点是:工作电压高,最高工作电压可达46V;输出电流大,瞬间峰值电流可达3A,持续工作电流为2A;额定功率25W。
内含两个H桥的高电压大电流全桥式驱动器,可以用来驱动直流电动机和步进电动机、继电器线圈等感性负载;采用标准逻辑电平信号控制;具有两个使能控制端,在不受输入信号影响的情况下允许或禁止器件工作有一个逻辑电源输入端,使内部逻辑电路部分在低电压下工作;可以外接检测电阻,将变化量反馈给控制电路。
使用L298N芯片驱动电机,该芯片可以驱动一台两相步进电机或四相步进电机,也可以驱动两台直流电机。
宝贝简介:一、尺寸:65mmX41mm X28mm二、主要芯片:L298N、光电耦合器三、工作电压:控制信号直流~;驱动电机电压5~30V四、可驱动直流(5~30V之间电压的电机)五、最大输出电流2A (瞬间峰值电流3A)六、最大输出功率25W七、特点:1、具有信号指示2、转速可调3、抗干扰能力强4、具有续流保护5、可单独控制两台直流电机6、可单独控制一台步进电机7、PWM脉宽平滑调速(可使用PWM信号对直流电机调速)8、可实现正反转9、采用光电隔离实例一:步进电机的控制实例步进电机是数字控制电机,它将脉冲信号转变成角位移,即给一个脉冲信号,步进电机就转动一个角度,因此非常适合于单片机控制。
步进电机可分为反应式步进电机(简称VR)、永磁式步进电机(简称PM)和混合式步进电机(简称HB)。
一、步进电机最大特点是:1、它是通过输入脉冲信号来进行控制的。
2、电机的总转动角度由输入脉冲数决定。
3、电机的转速由脉冲信号频率决定。
二、步进电机的驱动电路根据控制信号工作,控制信号由单片机产生。
(或者其他信号源)三、基本原理作用如下:步进电机控制:将IN1,IN2和IN3,IN4两对引脚分别接入单片机的某个端口,输出连续的脉冲信号。
L298N驱动电机C程序
#include
#define sen_port P1
sbit SEN1=P1^0;
sbit SEN2=P1^1;
sbit EN1=P2^2;
sbit IN1=P2^3;
sbit IN2=P2^4;
sbit EN2=P2^5;
sbit IN3=P2^6;
sbit IN4=P2^7;
{
IN1=1;
IN2=0;
IN3=0;
IN4=1;
EN1=1;
EN2=1;
}
void turn_right() //right moto is runing, but left moto is brake
{
IN1=0;
IN2=0;
IN3=1;
IN4=0;
EN1=1;
EN2=1;
}
void rotate_right() //left moto is running forward, and right moto is running backward
IN4=1;
EN1=1;
EN2=1;
}
void main(void)
{
delay(10);
P0=0x55;
while(1)
{
// P0=P1;
// delay(100); forward();
// delay(100); stop();
delay(100); backward();
delay(100); stop();
{
IN1=0;
IN2=1;
IN3=0;
IN4=1;
EN1=1;
EN2=1;
}
L298N驱动模块使用说明.

1. 产品说明产品说明::
本 L298N 驱动模块,采用 ST 公司原装全新的 L298N 芯片,采用 SMT 工艺稳定性高,采用高质量铝电解电容,使电路稳定工作。
可以直接驱动两路 3-16V 直流电机,并提供了 5V 输出接口(输入最低只要 6V , 可以给 5V 单片机电路系统供电 (低纹波系数 ,支持 3.3V MCU ARM 控制,可以方便的控制直流电机速度和方向,也可以控制2相步进电机,5线 4相步进电机。
是智能小车必备利器。
. 产品参数
产品参数:
:
1.驱动芯片:L298N双 H 桥直流电机驱动芯片
2.驱动部分端子供电范围 Vs:+5V~+16V ; 如需要板内取电,则供电范围Vs:+6V~+16V
3.驱动部分峰值电流 Io:2A
4.逻辑部分端子供电范围 Vss:+5V~+7V(可板内取电+5V
5.逻辑部分工作电流范围:0~36mA
6.控制信号输入电压范围(IN1 IN2 IN3 IN4 :
低电平:-0.3V≤Vin≤1.5V
高电平:2.3V≤Vin≤Vss
7.使能信号输入电压范围(ENA ENB :
低电平:-0.3≤Vin≤1.5V(控制信号无效
高电平:2.3V≤Vin≤Vss(控制信号有效
8. 最大功耗:20W (温度 T =75℃时
9. 存储温度:-25℃~+130℃
10. 驱动板尺寸 :55mm*45mm*33mm(带固定铜柱和散热片高度 12. 其他扩展:控制方向指示灯、逻辑部分板内取电接口。
3. 接口说明接口说明: :。
L298N电机驱动器使用说明书

L298N电机驱动器使用说明书注意:本说明书中添加超链接的按CTRL并点击连接,即可看到内容。
L298N是ST公司生产的一种高电压、大电流电机驱动芯片。
该芯片采用15脚封装。
主要特点是:工作电压高,最高工作电压可达46V;输出电流大,瞬间峰值电流可达3A,持续工作电流为2A;额定功率25W。
内含两个H桥的高电压大电流全桥式驱动器,可以用来驱动直流电动机和步进电动机、继电器线圈等感性负载;采用标准逻辑电平信号控制;具有两个使能控制端,在不受输入信号影响的情况下允许或禁止器件工作有一个逻辑电源输入端,使内部逻辑电路部分在低电压下工作;可以外接检测电阻,将变化量反馈给控制电路。
使用L298N芯片驱动电机,该芯片可以驱动一台两相步进电机或四相步进电机,也可以驱动两台直流电机。
简要说明:一、尺寸:80mmX45mm二、主要芯片:L298N、光电耦合器三、工作电压:控制信号直流5V;电机电压直流3V~46V(建议使用36伏以下)四、最大工作电流:2.5A五、额定功率:25W特点:1、具有信号指示。
2、转速可调3、抗干扰能力强4、具有过电压和过电流保护5、可单独控制两台直流电机6、可单独控制一台步进电机7、PWM脉宽平滑调速8、可实现正反转9、采用光电隔离六、有详细使用说明书七、提供相关软件八、提供例程及其学习资料驱动器结构详解1.信号电源引入端2.控制信号输入端3.直流电机调速PWM脉宽信号输入端。
(控制步进电机或者控制直流电机无需调速时,保持此状态)4.控制信号指示灯5.光电隔离(抗干扰) 6.核心芯片(L298N)7.二极管桥式续流保护8.电源滤波9.端子接线实例一:步进电机的控制实例步进电机是数字控制电机,它将脉冲信号转变成角位移,即给一个脉冲信号,步进电机就转动一个角度,因此非常适合于单片机控制。
步进电机可分为反应式步进电机(简称VR)、永磁式步进电机(简称PM)和混合式步进电机(简称HB)。
一、步进电机最大特点是:1、它是通过输入脉冲信号来进行控制的。