基于EtherCAT工业以太网协议的研究
工业以太网通信协议研究及应用

工业以太网通信协议研究及应用摘要:在绝大多数工业控制通信方面都是采用现场总线技术方式来实现的。
但长期以来现场总线种类繁多、同时又没有统一标准而导致互不兼容,使得系统集成和信息集成面临着巨大挑战,所以引入了应用广泛、高速率、低成本的以太网技术。
但以太网的可靠性和实时性比较差,难以适应工业控制的要求,故相关组织对以太网进行了一些扩展,称为工业以太网。
随着工业4.0的发展,相信工业以太网技术将越来越重要。
本文就常见工业以太网通信协议简介及应用作出阐述。
关键词:现场总线技术、工业以太网、EtherCat、Ethernet/IP、ProfiNet、Modbus/TCP、Ethernet/PowerLink、MechatroLink1常见工业以太网通信协议1.1、Modbus/TCPModbus/TCP是用于控制和管理自动化设备的Modbus系列通讯协议的派生产品。
由此可见,它覆盖了使用TCP/IP协议的Intranet企业内部网和Internet互联网环境中Modbus报文的用途。
该协议的最常见用途是为例如I/O、PLC模块以及连接其它简单域总线或I/O模块的网关服务的。
Modbus/TCP协议是作为一种实际的自动化标准发行的。
既然Modbus已经广为人知,该规范只将别处没有收录的少量信息列入其中。
然而该规范力图阐明Modbus中哪种功能对于普通自动化设备的互用性有价值,哪些部分是Modbus作为可编程的协议交替用于PLC的多余部分。
Modbus/TCP 在美国比较流行,它由两部分组成,即IDA分散式控制系统的结构与Modbus/TCP 的信息结构的结合。
Modbus/TCP定义了一个简单的开放式又广泛应用的传输协议网络用于主从通讯方式。
1.2.、Ethernet/IPEthernet/IP是一个面向工业自动化应用的工业应用层协议,这里的IP表示Industrial-Protocal。
它建立在标准UDP/IP与TCP/IP协议之上,利用固定的以太网硬件和软件,为配置、访问和控制工业自动化设备定义了一个应用层协议。
EtherCAT 与TSN——工业以太网系统架构的最佳实践

EtherCAT与TSN——工业以太网系统架构的最佳实践作者:EtherCAT技术协会Karl Weber博士摘要:EtherCAT 是现场总线领域的主流技术,而IEEE802.1Q标准是交换机技术在办公应用的基础。
TSN为IEEE 802网络提供实时能力。
现在可以在机器层使用EtherCAT,并通过交换机连接多台机器。
复杂的机器要求内置更多的通讯设施。
将EtherCAT网段集成到一个TSN 网络中可以结合这两种技术。
这无需改变EtherCAT的从站设备。
两种技术的适配通过在EtherCAT的主站端的更新及对连接EtherCAT的交换机的适度扩展来实现。
目标自工作组建立以来,TSN就成为人们所熟知的“时间敏感网络”的缩写。
TSN TG的组合用于为IEEE 802网络提供确定性服务。
TSN技术可以应用于多种应用场合。
其设计初始是用于一个只有少数几个终端站点的、需要传输大量的视频/音频(A/V)高速数据流的系统中。
TSN通过引入“高速通道”(streaming)概念扩展了IEEE 802的best effort网络模型。
此模型提供一系列用于提升高速通道实时性的特征。
对TSN的理解TSN工作组TSN工作组设置在IEEE802.1工作组中,负责桥接网络。
“桥接”一词用于标准的规范中,但更为大众的说法是“交换”。
TSN改善了帧在IEEE 802部分网络传输中的延迟性,并且没有因堵塞产生的损失。
这意味着交换机世界的改变。
然而,这并不会改变以太网网络的基本特征,例如每节点小数据量传输时效率低下,以及灵活却耗时而复杂的转发机制。
在终端站点间用TSN的桥接传输是通过“高速通道”(stream)实现的。
IEEE802.1 标准中使用术语“talker”表示高速通道的发起者,术语“listener”表示高速通道接收者。
高速通道使用单向的数据传输,数据可以从一个talker单向传输到一个或多个listener。
为了在IEEE 802.1网络中使用高速通道,需要一个高速通道标识。
基于EtherCAT总线的六轴工业机器人控制系统研究与开发

基于EtherCAT总线的六轴工业机器人控制系统研究与开发一、本文概述随着工业自动化技术的快速发展,工业机器人在生产线上的应用日益广泛。
作为工业机器人的核心组成部分,控制系统的性能直接决定了机器人的运动精度、稳定性和工作效率。
EtherCAT总线作为一种高性能的以太网现场总线技术,以其低延迟、高带宽和易扩展等特点,在工业控制领域得到了广泛应用。
本文旨在研究并开发一种基于EtherCAT总线的六轴工业机器人控制系统,以提高工业机器人的运动性能和控制精度,满足日益增长的自动化生产需求。
本文将首先介绍EtherCAT总线技术的基本原理和特点,分析其在工业机器人控制系统中的应用优势。
接着,将详细阐述六轴工业机器人的运动学模型和动力学特性,为控制系统的设计提供理论基础。
在此基础上,本文将重点研究控制系统的硬件架构和软件设计,包括EtherCAT主从站的选择与配置、运动控制算法的实现以及实时通信协议的优化等。
还将探讨控制系统的稳定性、可靠性和实时性等问题,以确保系统在实际应用中的稳定运行。
本文将通过实验验证所设计的控制系统的性能,并与传统控制系统进行对比分析。
实验结果将展示基于EtherCAT总线的六轴工业机器人控制系统在运动精度、响应速度和负载能力等方面的优势,为工业自动化领域的技术进步做出贡献。
二、EtherCAT总线技术EtherCAT(Ethernet for Control Automation Technology)是一种专为工业自动化领域设计的实时以太网通信协议。
它基于标准以太网技术,通过优化数据传输和同步机制,实现了高性能、低延迟的通信,特别适用于对实时性要求极高的工业控制系统中。
高速数据传输:EtherCAT协议支持高达100Mbps的数据传输速率,确保控制系统能够实时处理大量数据。
确定性延迟:通过优化网络结构和数据传输方式,EtherCAT实现了微秒级的确定性延迟,这对于精确控制工业机器人等应用至关重要。
EtherCAT网络及其伺服运动控制系统研究

2、扩展性强:EtherCAT网络采用总线型结构,可以方便地扩展网络规模, 适用于大规模的伺服运动控制系统。
3、抗干扰能力强:EtherCAT网络具有较好的抗干扰能力,能够在复杂的工 业环境中稳定运行,适用于各种恶劣条件的伺服运动控制系统。
三、研究方法
本次演示对基于Linux平台的EtherCAT运动控制系统进行研究。首先,通过 对系统需求进行分析,确定系统的基本架构和功能模块。接着,进行系统设计, 包括硬件选型、软件编程、系统调试等环节。最后,实施实验,对系统的稳定性、 实时性和数据传输率进行测试和评估。
四、实验结果与分析
通过实验,我们得到了基于Linux平台的EtherCAT运动控制系统的稳定性、 实时性和数据传输率等指标的数据。实验结果表明,该系统具有较高的稳定性和 实时性,能够在不同的工况条件下实现精确控制。同时,EtherCAT协议的高速数 据传输特性得到了充分体现,数据传输率达到了预期目标。
4、开放性:EtherCAT网络遵循以太网标准,具有开放性的特点,可以与各 种以太网设备进行无缝连接,方便构建集成化的伺服运动控制系统。
5、系统调试:对整个系统进行 调试和优化,确保系统稳定运行 并满足各项性能指标。
1、网络安全:确保EtherCAT网络的安全性,采取必要的安全措施,如设置 防火墙、加密通信等,防止网络攻击和数据泄露。
EtherCAT网络是一种工业以太网技术,由德国Beckhoff公司开发。它具有实 时性高、抗干扰能力强、扩展性强等优点,被广泛应用于各种工业自动化领域。 EtherCAT网络采用主从结构,由一个主站和多个从站组成,主站发送命令,从站 执行命令并向主站反馈执行结果。这种结构能够实现快速的数据传输和响应,适 用于高精度的伺服运动控制系统。
ethercat协议

ethercat协议EtherCAT协议是一种实时以太网协议,用于实时控制和数据通信。
它被广泛应用于工业自动化领域,能够提供低延迟、高性能和可靠的数据传输。
EtherCAT协议采用了主从结构,其中一个主节点负责通信调度,而其他从节点执行实际的控制任务。
EtherCAT协议的主要特点是基于以太网技术,通过硬件修改和软件描述来实现实时通信。
它使用了分布式时钟同步机制,确保所有的从节点都具有相同的系统时间。
这使得从节点可以在没有主节点的干预下进行实时控制,同时减少了通信的延迟。
EtherCAT协议还具有高效的数据传输方式。
它采用了类似于总线方式的通信结构,通过在数据帧中嵌入控制和数据信息,从而实现了实时传输。
这种方式减少了通信的负载,提高了数据的传输效率。
此外,EtherCAT协议还支持多种通信拓扑结构。
它可以实现星型、线性、环形、树形等多种拓扑结构,能够适应不同的系统需求。
这种灵活性使得EtherCAT协议可以应用于各种规模和复杂度的工业自动化系统。
在实际应用中,EtherCAT协议具有许多优势。
首先,它提供了实时的控制和数据通信能力,能够满足工业自动化系统对实时性的要求。
其次,EtherCAT协议具有高度的可扩展性和灵活性,能够适应不同的应用场景。
此外,EtherCAT协议还具有较低的成本,能够降低系统的总体成本。
然而,EtherCAT协议也存在一些挑战和限制。
首先,它对硬件的要求较高,需要支持实时以太网的网络接口卡和网络交换机等设备。
其次,EtherCAT协议的部署和调试相对较复杂,需要一定的专业知识和经验。
另外,由于EtherCAT协议的通信方式较为复杂,可能引入一定的安全风险,需要进行严格的安全措施。
总的来说,EtherCAT协议是一种高性能、高可靠性的实时以太网协议,广泛应用于工业自动化领域。
它通过分布式时钟同步、高效的数据传输和灵活的通信拓扑结构,实现了实时控制和数据通信的要求。
尽管存在一些挑战和限制,但随着技术的不断发展,EtherCAT协议有望在工业自动化领域取得更广泛的应用。
ethercat电路原理

ethercat电路原理EtherCAT(以太网控制自动化技术)是一种基于以太网的工业以太网技术,用于实现实时性要求高的工业控制应用。
它的电路原理涉及到以太网物理层、数据链路层和应用层的设计。
在EtherCAT 电路中,主要包括以下几个部分:1. 物理层:EtherCAT 采用了标准的以太网物理层,支持100BASE-TX 和1000BASE-T 以太网标准。
物理层负责将数据在以太网链路上进行传输。
2. 数据链路层:EtherCAT 在数据链路层使用了一种特殊的协议,称为EtherCAT 协议。
该协议采用了主从结构,主站负责发送数据帧,从站负责接收和处理数据。
EtherCAT 协议通过以太网数据帧的扩展字段来传输实时数据和控制信息。
3. 应用层:EtherCAT 应用层包括设备描述文件(Device Description File,DDF)和过程数据对象(Process Data Object,PDO)。
DDF 用于描述从站设备的特性和功能,PDO 用于传输实时的过程数据。
EtherCAT 电路的工作原理是:主站发送数据帧到从站,从站接收数据并根据DDF 进行解析和处理。
如果数据帧中包含PDO 数据,从站将实时数据传输给主站。
主站可以通过轮询或事件触发的方式与从站进行通信。
EtherCAT 的实时性是通过使用特殊的数据链路层协议和硬件实现的。
它采用了时间同步机制,保证了数据传输的确定性和实时性。
需要注意的是,以上是EtherCAT 电路的基本原理,实际的EtherCAT 系统还涉及到更多的细节和功能,如网络拓扑、从站配置、错误处理等。
如果你需要更深入了解EtherCAT 电路原理,建议参考相关的技术文档和资料。
ethercat协议解析

ethercat协议解析EtherCAT(Ethernet for Control Automation Technology)是一种用于实时工业自动化领域的通信协议。
它是基于以太网技术的开放式标准,旨在提供快速和可靠的实时通信能力。
本文将对EtherCAT协议进行解析,介绍其原理、特点和应用领域。
1. EtherCAT协议的原理EtherCAT协议采用了主从结构,由一个主站(Master)和多个从站(Slave)组成。
主站负责控制和协调从站的通信过程,从站用于连接传感器、执行器等设备,并通过 EtherCAT 总线与主站进行实时通信。
在EtherCAT总线上,主站通过发送广播消息的方式将数据传输给从站。
从站收到消息后,在消息的尾部加入自己的数据,并在不删除原始消息的情况下将消息继续传递给下一个从站,形成了一个环形结构。
这种消息传递方式被称为“分布式时钟同步广播”。
2. EtherCAT协议的特点2.1 高实时性:EtherCAT协议采用了快速数据传输方式,具有极低的通信延迟和高带宽。
这使得它在实时性要求严格的工业控制系统中得到广泛应用。
2.2 灵活性:EtherCAT总线支持多种拓扑结构,包括线性、树形和环形结构,适应不同工业环境的需求。
此外,EtherCAT还支持多种物理层接口,如光纤和电缆,以适应不同的通信环境。
2.3 简化布线:EtherCAT总线采用简单的硬件拓扑结构和标准以太网线缆,降低了系统的布线难度和成本。
2.4 容错性:EtherCAT协议具有自动冲突检测和冲突解决功能,可在网络拓扑发生变化时自动适应,并保持网络正常运行。
2.5 开放性:EtherCAT是一个开放的通信协议,其通信规范公开可得。
这使得各厂商可以根据自己的需求和应用开发符合EtherCAT标准的设备和系统。
3. EtherCAT协议的应用领域EtherCAT协议在各种工业自动化领域得到了广泛应用,包括机器人控制、自动化生产线、测试和测量系统等。
ethercat总线原理
ethercat总线原理EtherCAT(Ethernet for Control Automation Technology)是一种高性能实时以太网总线通信协议,它的出现极大地推动了工业自动化领域的发展。
本文将从EtherCAT总线的原理入手,介绍其工作原理、优势和应用领域。
一、EtherCAT总线的工作原理EtherCAT总线基于以太网技术,采用主从结构,其中一个设备被指定为主站,其他设备作为从站。
主站负责控制和同步从站的通信,从站负责执行主站下发的指令,并将执行结果返回给主站。
EtherCAT总线采用了一种分布式的数据传输方式,称为“串联”(daisy chain)。
在EtherCAT总线上,从站之间通过一条物理链路相互连接,形成一个环形网络。
主站通过这个环形网络将数据广播给所有的从站,每个从站都能够读取和写入自己关心的数据。
EtherCAT总线的数据传输速度非常快,每个从站只需要在数据通过自己时进行处理,并将数据传递给下一个从站,而不需要等待整个数据传输过程完成。
这种串联的数据传输方式极大地提高了总线的实时性和性能。
二、EtherCAT总线的优势1. 高性能:EtherCAT总线的数据传输速度达到了每毫秒1000个数据包的处理能力,满足了高性能实时控制的需求。
2. 灵活性:EtherCAT总线支持多种拓扑结构,可以适应不同的应用场景。
同时,EtherCAT总线还支持热插拔功能,可以在运行时添加或移除从站设备。
3. 成本效益:EtherCAT总线采用通用的以太网硬件设备,降低了系统的成本。
同时,由于EtherCAT总线具有高性能和实时性,可以减少硬件和软件的复杂性,进一步降低了系统的成本。
4. 易于集成:EtherCAT总线与现有的以太网技术兼容,可以直接与计算机网络连接,方便实现数据的监控和远程管理。
三、EtherCAT总线的应用领域EtherCAT总线在工业自动化领域有着广泛的应用。
它可以用于机器人控制、自动化生产线、工业机械、过程控制等各种应用场景。
ethercat方面的书

ethercat方面的书EtherCAT是一种实时以太网通信协议,广泛应用于工业自动化领域。
本文将介绍一本关于EtherCAT的书籍,着重讨论EtherCAT的原理、应用和优势。
标题:《深入理解EtherCAT:实时以太网通信协议》第一部分:引言在工业自动化领域,实时通信是至关重要的。
以太网作为一种广泛应用的通信协议,其实时性一直是一个挑战。
然而,EtherCAT作为一种高性能的实时以太网通信协议,成功地解决了这个问题。
本书将深入探讨EtherCAT的原理、应用和优势,帮助读者更好地理解和应用这一协议。
第二部分:EtherCAT的原理2.1 EtherCAT的基本原理EtherCAT采用了主从结构,其中一个主站控制多个从站。
主站通过以太网发送数据帧到从站,从站收到数据后进行处理,并返回响应。
这种分布式的通信结构使得EtherCAT具有高效的实时性能。
2.2 EtherCAT的通信机制EtherCAT采用了一种称为“分布式时钟同步”的机制,确保各个从站之间的通信同步。
此外,EtherCAT还使用了“流式处理”机制,使得从站能够在不中断通信的情况下进行数据处理。
第三部分:EtherCAT的应用3.1 工业自动化EtherCAT广泛应用于工业自动化领域,如机器人控制、自动化生产线和工厂自动化等。
其高实时性和可靠性使得工业设备能够实现精确的控制和协调。
3.2 智能交通系统EtherCAT在智能交通系统中也有广泛应用,如交通信号灯控制、智能车辆和交通监控系统等。
通过EtherCAT,交通系统能够实现快速的数据传输和准确的控制,提高整体交通效率。
第四部分:EtherCAT的优势4.1 高实时性EtherCAT具有非常高的实时性能,能够满足工业自动化等领域对实时通信的需求。
4.2 灵活性和可扩展性EtherCAT具有灵活性和可扩展性,可以适应不同规模和复杂度的系统。
其分布式结构和流式处理机制使得系统能够灵活地扩展和升级。
ethercat 方案
EtherCAT 方案1. 概述EtherCAT(Ethernet for Control Automation Technology)是一种用于实时控制的高性能工业以太网通信协议。
它是一种开放的标准,允许实时数据在多个从站设备之间进行高效的通信。
EtherCAT 方案适用于各种工业自动化应用,提供了高速、实时和可靠的通信能力。
2. EtherCAT 架构EtherCAT 网络由一个主站(Master)和多个从站(Slave)组成。
主站负责控制和调度整个网络的通信,在每个通信周期内向从站发送命令和接收数据。
从站负责执行主站发送的命令并返回相应的数据。
EtherCAT 网络使用总线拓扑结构,所有从站设备通过一根共享的以太网电缆连接在一起。
3. EtherCAT 实时通信EtherCAT 的实时通信能力是其最重要的特点之一。
通过使用分布时钟和数据处理的方式,EtherCAT 实现了极低的通信延迟和高带宽利用率。
每个从站设备接收到主站发送的数据后,便可以立即进行处理并向下一个从站传递数据,从而实现了实时通信。
4. EtherCAT 网络拓扑EtherCAT 网络可以灵活地配置为不同的拓扑结构,根据具体的应用需求选择适合的网络结构。
常见的拓扑结构包括:线性结构、环状结构和星形结构。
线性结构适用于长距离的通信,环状结构适用于需要高可靠性和冗余的场景,星形结构适用于连接多个从站设备到一个主站的场景。
5. EtherCAT 协议栈EtherCAT 协议栈是实现 EtherCAT 通信的软件组件。
它包含了从物理层到应用层的各个协议组成部分,并提供了一种简便的方式来进行 EtherCAT 网络的开发。
常见的 EtherCAT 协议栈包括 Beckhoff 的 TwinCAT、EtherCAT Slave Stack 和EtherCAT Master Stack 等。
6. EtherCAT 主从站配置在 EtherCAT 网络中,主站和从站的配置是非常重要的。
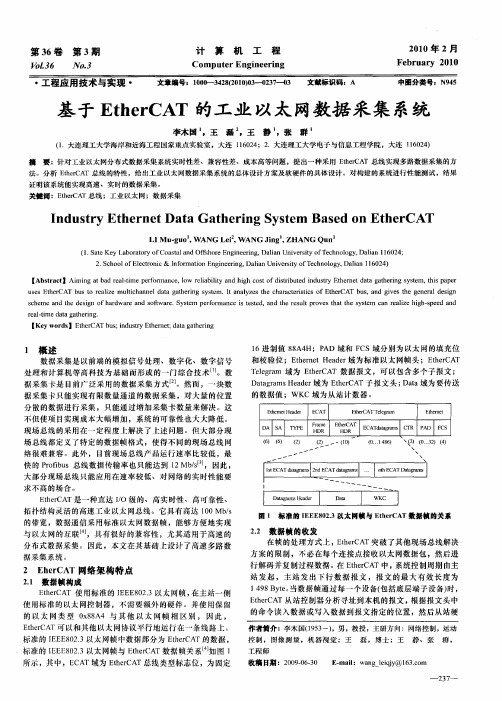
基于EtherCAT的工业以太网数据采集系统
I ywo d E hr A u ;n u时 Eh re;aagteig r s teC Tb sid s Ke l ten td t ahr n
1 概 述
数据采集是 以前端 的模 拟信 号处理、数字 化、数字 信号 处 理 和 计 算机 等 高 科 技 为 基 础 而 形成 的 一 门 综 合 技 术 …。数 据采集卡 是 目前广泛采用 的数据采集 方式 。然而 ,一块数 J
第3 6卷 第 3 期
VL o 36 N o3
计
算
机
工Hale Waihona Puke 程 21 0 0年 2月
Fe ua y 20 0 br r 1
Com pu e gi e i t rEn ne r ng
・工程应 用 技术 与 实现 ・
文章编号: 0 48 003 _3— 3 10 2( l)—0 7 2 0 2
2 S h o fElcr n c& If r to gn ei 。 la ie st fT c noo y Dain 1 6 2 ) .col o e to i n o mainEn ie rng DainUnv ri o e h lg , l 0 4 y a 1
[ src ]Ai n t a eli efr ac ,o rl bl n ihc s o ir ue d s yEh me aag teigsse tip pr Abtat miga b dra—mepro n e lw ei it adhg ot f s i tdi ut te t t ahr ytm,hs a e t m a i y d tb n r d n
HD R
ethercat协议

EtherCAT协议简介EtherCAT(Ethernet for Control Automation Technology)是一种高性能、实时性强的工业以太网通信协议。
它被广泛应用于工业自动化领域,用于实时控制和数据采集。
本文将介绍EtherCAT协议的工作原理、优势以及应用场景。
工作原理EtherCAT采用主从式架构,其中有一个主节点(Master),多个从节点(Slave)以及通信线路组成。
主节点负责发送控制指令,从节点负责接收控制指令并执行相应的操作。
通信线路采用以太网技术,通过在以太网帧中封装EtherCAT帧来实现快速和实时的通信。
EtherCAT协议利用以太网的时分多路访问(Time Division Multiple Access)功能,在通信周期内将多个从节点的数据封装成一个帧进行传输。
主节点发送的控制指令通过一个环路(Ring)在从节点之间传递,每一个从节点都可以读取和修改需要的数据,然后将帧传递给下一个节点。
这种串联的方法大大降低了通信延迟和通信带宽的消耗,提高了通信速度和实时性。
优势高性能与实时性EtherCAT协议具有非常低的通信延迟和高的通信带宽,能够实现微秒级的实时控制。
这使得它非常适合于需要高性能和高实时性的应用,如机器人控制、高速运动控制等。
易于集成和扩展EtherCAT协议基于以太网技术,可以与现有的以太网设备兼容。
它能够利用现有的以太网物理层和网络结构,减少硬件设备和布线的成本。
同时,EtherCAT协议也支持分布式扩展,可以方便地添加新的从节点,灵活应对不同的应用需求。
灵活的拓扑结构EtherCAT协议支持多种拓扑结构,包括线性、环状、星型等。
用户可以根据具体的应用需求选择合适的拓扑结构,从而更好地满足系统的可靠性和可扩展性要求。
强大的诊断和监控功能EtherCAT协议具有强大的诊断和监控功能,可以实时监控从节点的状态和性能指标。
主节点可以根据从节点的反馈信息进行故障诊断和状态监控,提高系统的可靠性和稳定性。
ethercat协议

ethercat协议EtherCAT协议。
EtherCAT(Ethernet for Control Automation Technology)是一种高性能实时以太网通信协议,它是基于乙太网的一种工业通信协议。
EtherCAT协议的特点是具有极高的实时性和通信效率,适用于工业自动化领域的高速数据交换和实时控制。
EtherCAT采用了一种分布式IO的网络拓扑结构,通过在每个从站设备上进行数据处理和转发,实现了一种高效的实时通信方式。
在EtherCAT网络中,主站通过发送数据帧的方式,将数据从一个从站传递到另一个从站,从而实现了高效的数据交换和实时控制。
与传统的以太网通信协议相比,EtherCAT协议具有以下几点优势:1. 高实时性,EtherCAT协议采用了分布式IO的方式,从而实现了高效的数据传输和实时控制。
在EtherCAT网络中,数据可以在微秒级的时间内传递,满足了工业自动化领域对实时性的要求。
2. 高通信效率,EtherCAT网络中的从站设备可以同时接收和发送数据,从而实现了并行的数据传输。
这种并行传输的方式大大提高了通信效率,减少了通信的延迟和传输的时间。
3. 灵活的拓扑结构,EtherCAT网络支持灵活的拓扑结构,可以根据实际的应用需求进行布线和配置。
从站设备之间可以通过链式、星型、树状等多种方式进行连接,满足了不同场景下的网络布局需求。
4. 易于集成,EtherCAT协议可以与现有的以太网设备无缝集成,不需要额外的硬件支持和网络设备。
这使得EtherCAT协议在工业自动化领域的应用更加便捷和灵活。
总的来说,EtherCAT协议作为一种高性能实时以太网通信协议,在工业自动化领域具有广泛的应用前景。
它不仅可以满足工业控制系统对于高实时性和高通信效率的要求,同时也具有灵活的拓扑结构和易于集成的特点,为工业自动化领域的网络通信提供了一种全新的解决方案。
总结一下,EtherCAT协议的出现为工业自动化领域的网络通信带来了全新的可能性,它以其高实时性、高通信效率、灵活的拓扑结构和易于集成等特点,成为了工业控制系统中的重要通信协议。
ethercat 通讯结构
Ethercat 通讯结构介绍Ethercat(以太网计算机自动控制技术)是一种高性能、实时以太网通信协议,适用于工业自动化领域。
本文将全面探讨Ethercat通讯结构,包括其基本原理、通讯模型以及应用实例。
Ethercat 通讯基本原理Ethercat 通讯基于以太网协议,但它采用了一种分布式时钟同步和全局共享通道的方式,使得各个从设备之间的通讯变得十分高效和实时。
Ethercat 的基本工作原理如下:1.Master-Slave 结构:Ethercat 网络由一个Master(主主机)和多个Slave(从设备)组成。
Master负责控制通讯的调度和同步,而Slave则负责执行具体的任务。
2.工作周期:Ethercat 的通讯是按照固定的周期进行的,该周期被称为工作周期。
Master控制数据帧的发送和接收,并确保在每个工作周期内完成所有从设备的通讯。
3.分布式时钟同步:Ethercat 网络的一个重要特点是分布式时钟同步。
Master通过向每个Slave发送同步帧来同步所有从设备的时钟,使得整个网络保持高度同步。
4.数据传输:Ethercat 通过在一个以太网数据帧(Ethercat Frame)中封装从设备的数据,实现高效的数据传输。
每个数据帧中可以包含一个或多个从设备的数据信息。
Ethercat 通讯模型Ethercat 采用了Master-Slave结构的通讯模型,下面是Ethercat 通讯模型的详细流程:1.Master 发送同步帧:在每个工作周期的开始,Master向网络中的所有Slave发送同步帧,以实现时钟同步。
2.从设备响应:每个Slave接收到同步帧后,根据同步帧中的时间戳更新自身的时钟,并准备好接收数据。
3.数据传输:Master在同一个工作周期内依次发送数据帧给每个Slave,并接收从设备返回的数据。
4.数据处理:每个Slave接收到数据帧后,解析其中的数据,并根据Master的指示执行相应的任务。
ethercat原理介绍及应用实例

ethercat原理介绍及应用实例EtherCAT的原理是基于以太网技术的,但与传统以太网不同的是,它使用了一种称为“分布式时钟同步”的技术。
在EtherCAT网络中,每个从站(Slave)都具有自己的时钟,主站(Master)通过广播同步帧将数据发送给所有的从站,从站们都能够在同一时刻接收到数据。
这种同步技术使得EtherCAT网络能够以很高的实时性和精准度传输数据,从而满足实时控制系统的要求。
在实际应用中,EtherCAT可以用于各种工业自动化系统中,例如机床、生产线、机器人等。
下面将介绍一些实际应用案例,以便更好地理解EtherCAT的应用。
1. 机械控制系统在机械控制系统中,通常需要对各种运动控制设备进行精确控制。
EtherCAT可以被用来连接各种运动控制器、伺服驱动器、编码器等设备,实现对机械系统的实时控制。
通过EtherCAT网络,可以将各个控制设备连接在一起,实现数据共享和同步控制。
举例来说,一个自动化生产线中可能会有多个运动轴需要控制,比如输送带、机械臂等。
利用EtherCAT网络可以将这些运动轴连接在一起,实现统一的运动控制。
主站可以发送指令给各个从站,从而实现对多个运动轴的同步控制,提高生产效率和精度。
2. 工业机器人工业机器人是现代工业生产中不可或缺的设备,它可以自动执行各种生产任务,提高生产效率和产品质量。
在工业机器人的控制系统中,需要实时传输大量的数据,以确保机器人的运动精度和安全性。
EtherCAT可以被用来连接机器人控制器、传感器、执行器等设备,实现对工业机器人的实时控制。
通过EtherCAT网络,控制器可以实时接收到传感器的数据,并根据实时情况做出相应的控制指令,从而确保机器人的准确运动和安全操作。
3. 数据采集和监控系统在工业生产中,需要采集和监控各种数据来确保生产过程的正常运行。
EtherCAT可以被用来连接各种传感器、控制器、监控设备等,实现对工业过程的实时监控和数据采集。
ethercat协议解析

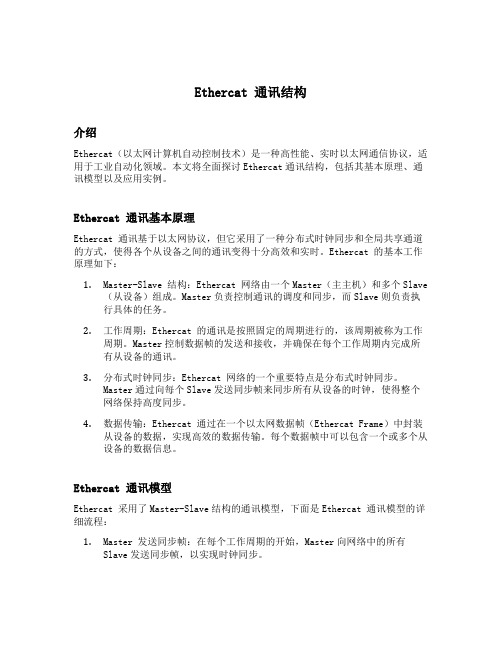
• 信号分为模拟信号与数字信号两类;
• 模拟信号的电平连续变化;
• 数字信号的电平以脉冲变化;
模拟信号
v(t)
与数字信号
t
波形
(a)模拟信号 v(t)
t (b)数字信号
.
数据编码技术
计算机的 二进制数据
计算机内部 表示信息的 二进制数据
模拟信号 数字信号
模拟 数据 编码
数字 数据 编码
振幅键控ASK 移频键控FSK 移相键控PSK
• 1)EtherCAT是最快的工业以太网技术之一,同时它提供纳秒级精确同步。相对于设置了相同循环时 间的其他总线系统,EtherCAT系统结构通常能减少25%-30%的CPU负载。
• 2)EtherCAT在网络拓扑结构方面没有任何限制,最多65535个节点可以组成线型、总线型、树型、星 型或者任意组合的拓扑结构。
外同步编码 内同步编码
非归零码
曼彻斯特编码 差分曼彻斯特编码
通信系统用 于表示二进 制数据类型
数据信号 编码类型
.
具体的数据编码方法
模拟数据编码方法
b0 0 数据
(a)ASK ω
2
(b)FSK
π (c)PSK(绝对)
b1
b2
b3
1
0
0
ω
ω
ω
ω
1
2
2
0
π
π
b4
b5
1
0
ω
ω
ω
1
2
0
π
+0
+π
+0
+0
+π
• 第二种策略是基于以太网的实现,在网络层和传输层上进行修改。送一类工业以太网基于 标准的ISO/IEC802.3中物理层和数据链路层协议,工业控制的过程数据不通过TCP/IP协议传 输,而是采用专用的协议完成其传输。仅当系统需要访问商用网络时才使用TCP/IP。常用手 段有时间片机制。这一类工业太网中比较典型的是Ethernet powerlink、EPA(Ethernet for plant automation)和profinet RT(real-time)。
ethercat 入门 系统描述

EtherCAT 入门系统描述导言EtherCAT(以太CAT)是一种实时以太网通信协议,用于在工业自动化领域中,实现高性能、低延迟的实时控制系统。
本文将介绍EtherCAT的基本概念、工作原理、应用领域和入门实践,帮助读者对EtherCAT有一个全面的了解。
1. EtherCAT 概述EtherCAT是一种基于以太网的实时控制总线技术,由Beckhoff在2003年开发并发布。
EtherCAT使用一种分布式时钟同步方法,可以在微秒级实现通信,具有低延迟和高带宽的特点。
它通过实时以太网实现分布式控制器、设备和传感器之间的通信,并支持多种通信拓扑,如线性、环形和星形等。
2. EtherCAT 架构EtherCAT系统由主站和从站组成。
主站通常是一个工控机或PLC,负责发送和接收数据。
从站可以是各种类型的设备和传感器,如电机驱动器、温度传感器等。
主站通过EtherCAT总线将数据发送到从站,并从从站接收响应数据。
3. EtherCAT 性能特点3.1 高实时性EtherCAT通过一种优化的通信协议和分布式时钟同步机制,实现了高实时性的通信。
在EtherCAT网络中,从站可以将数据实时传输到主站,主站可以实时下发控制指令到从站,这使得EtherCAT非常适用于实时控制和反馈应用。
3.2 低传输延迟EtherCAT的通信延迟非常低,通常在微秒级别。
这主要得益于EtherCAT的传输方式,数据在从站上通过实时以太网线路进行处理,然后再通过总线传输到主站。
这种快速传输的特点使得EtherCAT在需要快速响应的应用中非常有用。
3.3 高带宽EtherCAT的带宽可以根据实际应用需求进行扩展,可以支持多个从站同时进行数据传输。
这使得EtherCAT在需要高带宽的应用场景中非常适用,如高速运动控制和大规模数据采集等。
4. EtherCAT 应用领域EtherCAT在众多工业自动化领域中得到广泛应用,以下是一些常见的应用领域:- 机床控制:EtherCAT可用于高精度和高速度的机床控制系统,通过将运动控制器和传感器连接到EtherCAT总线上,实现快速准确的运动控制。
ethercat soep工作原理 -回复

ethercat soep工作原理-回复EtherCAT (Ethernet for Control Automation Technology) 是一种高性能、实时和开放的工业以太网通信协议,SOEP (Service-Oriented Ethernet Protocol) 是Ethernet和EtherCAT之间的标准化通信接口。
本文将一步一步回答"[EtherCAT SOEP工作原理]"这一主题,详细介绍EtherCAT和SOEP的工作原理。
第一步- EtherCAT概述EtherCAT是一种实时以太网协议,用于实现工业自动化系统中各种设备之间的通信。
它建立在以太网硬件和通信协议的基础上,并通过使用EtherCAT Master(主站)和EtherCAT Slave(从站)之间的通信实现设备之间的实时数据交换。
第二步- EtherCAT通信原理EtherCAT通信采用主从结构,其中主站负责同步所有从站的操作。
主站通过以太网发送包含控制和数据信息的数据帧到各个从站并接收响应。
这些数据帧被称为EtherCAT Telegrams(电文),其中包含相应从站的数据和命令。
第三步- EtherCAT电文结构EtherCAT电文采用Master-Slave架构,并由一系列以太网帧组成。
每个电文都具有固定的结构,包括头部、数据区、CRC校验部分和帧尾。
头部指定了电文的一些重要信息,数据区则包含具体的从站数据信息,CRC校验部分用于确保数据传输的可靠性。
第四步- EtherCAT数据传输过程EtherCAT的数据传输依赖于"process data"(处理数据)和"Service Channel"(服务通道)两个重要的部分。
处理数据是指应用特定的数据,它们被打包在电文的数据区并在从站之间传输。
服务通道负责实现从站之间的控制通信,它可用于配置和诊断EtherCAT网络以及传输以太网协议之上的标准以太网数据。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(工程硕士) 基于 EtherCAT 工业以太网协议的研究 A STUDY ON INDUSTRIAL ETHERNET PROTOCOL BASED ON ETHERCAT
安丽荣
哈尔滨工业大学 2011 年 12 月
国内图书分类号:TP336 国际图书分类号:621.7
学校代码:10213 密级:公开
Prof.Zhang Qinyu Prof.Xu Yong Master of Engineering Electronics and Communication
Engineering
Байду номын сангаас
Affiliation:
Shenzhen Graduate School
Date of Defence:
December, 2011
1.2.1 以太网发展的概述 ......................................................................................3 1.2.2 EtherCAT的发展与特点 ..............................................................................6 1.2.3 EtherCAT的研究现状与应用 ......................................................................6 1.3 研究内容..............................................................................................................7 1.4 论文结构.............................................................................................................9 第 2 章EtherCAT协议的框架.......................................................................................10 2.1 工业以太网概述................................................................................................10 2.1.1 工业控制以太网的原理和结构 ................................................................10 2.1.2 工业控制以太网的技术特点 ....................................................................12 2.1.3 工业控制以太网的重要性 ........................................................................13 2.1.4 工业控制以太网使用用户的利益 ............................................................14 2.2 EtherCAT协议数据帧结构...............................................................................14 2.3 EtherCAT协议的寻址方式...............................................................................16 2.3.1 EtherCAT网段寻址 ....................................................................................17 2.3.2 设备寻址 ...................................................................................................18 2.3.3 逻辑寻址 ....................................................................................................18 2.4 EtherCAT协议的通信模式...............................................................................19 2.4.1 周期性过程数据通信 ................................................................................19 2.4.2 非周期性过程数据通信 ............................................................................20 2.5 EtherCAT协议的定性分析...............................................................................21 2.6 本章小结...........................................................................................................23 第 3 章EtherCAT的主从站设计...................................................................................24 3.1 主站设计...........................................................................................................24 3.1.1 面向主站设计的硬件平台设计 ...............................................................24 3.1.2 面向主站设计的软件系统开发 ................................................................26 3.2 从站设计...........................................................................................................27 3.2.1 面向从站设计的硬件平台设计 ...............................................................27 3.2.2 面向从站设计的软件系统设计 ...............................................................32
Degree-Conferring-Institution: Harbin Institute of Technology
哈尔滨工业大学工程硕士学位论文
摘要
本文论述了工业以太网 EtherCAT 协议的性能。基于 EtherCAT 协议分析了工 作方式和系统原理,得出了其相对于其他工业以太网协议的优势。根据 EtherCAT 主站从站工作原理,成功设计并搭建了一套 EtherCAT 协议系统平台。并对整个系 统进行了单从站和多从站的测试和分析。
EtherCAT is a kind of real-time Ethernet technology raised by BECKHOFF in 2003. It has high speed, high data availability, and supports many kinds of topological structures. The slaves use specialized controller chips and the masters use standard Ethernet controller. The thesis analysed and contrasted the EtherCAT protocol, raised the framework based on EtherCAT protocol, even gave the reasonable estimation and quantitative measurement. Above all, the thesis provided a well foundation for the development and industrialization of EtherCAT. Keywords: EtheCAT;Embeded System;Master Station;Slave Station
With the fast development of industrial automation and increasing requirement of the communication, motion industry has higher and higher requirement on the real-time and networking, so many kinds of real-time Ethernet appeared, and with the going deep of research, the devices based on real-time Ethernet became more and more, so that the control network became complexer.