Mech-Intro_14.0_WS02.1_Basics
SIMOCODE pro PCS 7 库函数开始指南说明书
Industrial Controls SIMOCODE pro SIMOCODE pro PCS 7 LibraryGetting Started10/2018Siemens AGDivision Digital Factory Postfach 48 483ZX1012-0CS16-5BC1Ⓟ10/2018 Subject to change Copyright © Siemens AG 2016. All rights reservedLegal informationWarning notice systemThis manual contains notices you have to observe in order to ensure your personal safety, as well as to prevent damage to property. The notices referring to your personal safety are highlighted in the manual by a safety alert symbol, notices referring only to property damage have no safety alert symbol. These notices shown below aregraded according to the degree of danger.indicates that death or severe personal injury will result if proper precautions are not taken.WARNINGindicates that death or severe personal injury may result if proper precautions are not taken.CAUTIONindicates that minor personal injury can result if proper precautions are not taken. NOTICEindicates that property damage can result if proper precautions are not taken.If more than one degree of danger is present, the warning notice representing the highest degree of danger will be used. A notice warning of injury to persons with a safety alert symbol may also include a warning relating to property damage.Qualified PersonnelThe product/system described in this documentation may be operated only by personnel qualified for the specific task in accordance with the relevant documentation, in particular its warning notices and safety instructions. Qualified personnel are those who, based on their training and experience, are capable of identifying risks and avoiding potential hazards when working with these products/systems.Proper use of Siemens productsNote the following:WARNINGSiemens products may only be used for the applications described in the catalog and in the relevant technical documentation. If products and components from other manufacturers are used, these must be recommended or approved by Siemens. Proper transport, storage, installation, assembly, commissioning, operation andmaintenance are required to ensure that the products operate safely and without any problems. The permissible ambient conditions must be complied with. The information in the relevant documentation must be observed.TrademarksAll names identified by ® are registered trademarks of Siemens AG. The remaining trademarks in this publication may be trademarks whose use by third parties for their own purposes could violate the rights of the owner.Disclaimer of LiabilityWe have reviewed the contents of this publication to ensure consistency with the hardware and software described. Since variance cannot be precluded entirely, we cannot guarantee full consistency. However, the information in this publication is reviewed regularly and any necessary corrections are included in subsequent editions.Table of contents1 Preface (5)2 Security information (7)3 Product specific security information (9)4 Introduction (11)4.1 Introduction (11)5 Getting Started (13)5.1 Installation (13)5.2 HW Config (14)5.3 CFC (17)5.4 Operator Station (23)6 References (35)7 List of Abbreviations (37)7.1 Abbreviations (37)SIMOCODE pro PCS 7 LibraryTable of contentsSIMOCODE pro PCS 7 LibraryPreface 1 Brief descriptionThe Getting Started of the SIMOCODE pro PCS 7 Library uses a simple example project toshow you the basic procedures:●Basic configuration steps●Handling and monitoring different signal blocks●ParameterizationThis Getting Started manual is intended to be an introduction and largely dispenses withdetailed information and background information.RequirementsBasic knowledge of creating a PCS 7 project is necessary. You will find information aboutConventionsThis documentation contains designations of the software interface elements. If you haveinstalled a multi-language package for the operating system, some of the designations willbe displayed in the base language of the operating system after a language switch and will,therefore, differ from the designations used in this documentation.Versions and documentationSIMOCODE pro PCS 7 LibraryPrefaceSIMOCODE pro PCS 7 LibrarySoftware required for the Getting Started of the SIMOCODE pro PCS 7 Library● You can execute the example project on any PC or programming device on which the following software is installed: – Windows operating system – Internet Explorer– Message Queuing service – SQL serverNoteThe versions required depend on the version of PCS 7 installed.You can find further relevant details in the following manuals:–on the – ● To do so, follow the instructions in the Process Control System PCS 7; Getting StartedHardware required for creating an example projectThis PCS 7 example project was created with the following hardware for the automation station (AS):Table 1- 1Hardware - Automation station 1: Configuration direct on the master systemOrder numberDescription6ES7 410-5HX08-0AB0 SIMATIC S7-400, CPU 410-5H with 1*DP and 2*PN interfaces6ES7 407-0KA02-0AA0SIMATIC S7-400, power supply PS 407 10A, AC 120/230V/10A standard PSTable 1- 2SIMOCODE HardwareOrder number Description3UF7 010-1A*00-0SIMOCODE pro V Basic UnitSecurity information 2 Siemens provides products and solutions with industrial security functions that support thesecure operation of plants, systems, machines and networks.In order to protect plants, systems, machines and networks against cyber threats, it isnecessary to implement – and continuously maintain – a holistic, state-of-the-art industrialsecurity concept. Siemens’ products and solutions constitute one element of such a concept.Customers are responsible for preventing unauthorized access to their plants, systems,machines and networks. Such systems, machines and components should only beconnected to an enterprise network or the internet if and to the extent such a connection isnecessary and only when appropriate security measures (e.g. firewalls and/or networksegmentation) are in place.For additional information on industrial security measures that may be implemented, pleasevisithttps:///industrialsecurity.Siemens’ products and solutions undergo continuous development to make them moresecure. Siemens strongly recommends that product updates are applied as soon as they areavailable and that the latest product versions are used. Use of product versions that are nolonger supported, and failure to apply the latest updates may increase customer’s exposureto cyber threats.To stay informed about product updates, subscribe to the Siemens Industrial Security RSSFeed underhttps:///industrialsecurity.SIMOCODE pro PCS 7 LibrarySecurity informationSIMOCODE pro PCS 7 LibraryProduct specific security information 3 Product specific security informationThis library is designed to run under the PCS 7 environment. Therefore, it is recommendedto follow the security principles for PCS 7 to support a secure operation, such as:●User rights●Password protection of–WinCCSIMOCODE pro PCS 7 LibraryProduct specific security informationSIMOCODE pro PCS 7 LibraryIntroduction 4 4.1IntroductionIntroductionThis document explains the basic principles of using the SIMOCODE pro PCS 7 Library. TheSIMOCODE pro PCS 7 Library is designed according to APL standards for both, blocks andfaceplates. This library contains CFC templates to fulfill the control functions of a MotorManagement device.For reducing configuration time on site, a module driver generator is included with thislibrary. By using this driver generator it is ensured that all necessary interconnections will behandled automatically by the system and the device is ready to operate in PCS 7environment.Custom configuration can be done by the user as well. User manual and online help will givedetailed information about the blocks and their input and output pins.This document will guide you through the necessary steps for using the template and themodule driver generator in a PCS 7 environment using a sample project. This sample usesminimum hardware, single station, one PLC connected to one SIMOCODE pro V viaPROFIBUS.PrerequisitesUserPCS 7 knowledge:●Project creation●HW-Config●CFC-Editor●WinCC-Explorer●WinCCYou can find the manuals for your PCS 7 Version in the manual collection.Introduction4.1 IntroductionSystem●Installed and compatible PCS 7 version●Installed SIMOCODE pro PCS 7 Library●PCS 7 Multiproject (created by Project-Wizard).Refer read me for this library for software details and steps to follow to change the existingproject to migration.CommunicationActive communication network between Engineering Station (ES)/Operator Station (OS) andthe PLC.Getting Started 5 5.1InstallationInstallationThe Setup program will guide you through the required steps. Use "< Back" and "Next >"buttons to navigate through the screens during the installation process. The installationprogram supports German and English. Please choose your language at the initial screen.The SIMOCODE pro library has two components:●AS = Components for Automation System●OS = Components for Operator StationFor example, this library has:●Library for SIMOCODE pro PCS 7 AS●Faceplates for SIMOCODE pro PCS 7 OSInstallation program will ask you to decide, which product you want to install. Below is thedecision matrix:AS OSSingle Station X XAS OSDistributed System Engineering Station X -Operator Station - X'X' - required, '-' - not required5.2 HW Config5.2HW ConfigHW ConfigOpen HW-Config and switch the hardware catalog profile to Standard.Below are the SIMOCODE pro objects for:Communication Integration Catalog pathPROFIBUS OM at PROFIBUS DP > Switching Devices >Motor Management SystemEDD PROFIBUS DP > Switching DevicesGSD PROFIBUS DP > Additional Field De-vices > Switching Devices >SIMOCODEPROFINET OM PROFINET IO > Switching devices >Motor Management SystemEDD1.2PROFINET IO > Switching devices >Motor Management System > GSD3GSDML1.21SIMOCODE pro V GSD (V1.5) and GSDML: Insert the Basic Type which meets yourrequirement.2The same object is used for GSD and EDD integration in HW-Config. Configuration viaPDM for EDD support needs to be activated by the user in Object Properties (Alt+Return) ofthe SIMOCODE pro Object.3Folder entry GSD will be created in case of parallel integration of SIMOCODE pro OM,integrated via SIMOCODE ES.Drag and drop the desired SIMOCODE pro-Object into the Station Window and connect itwith PROFIBUS resp. PROFINET line.5.2 HW ConfigBasic TypesThe length of the I/O data of the SIMOCODE pro device varies by the configured BasicType. The Basic Type defines how many valid data will be sent and received by the device inevery cycle. Bytes 2 and 3 are predefined and used for the max. Current I max. More bytes,supported by basic types 1 and 3, may be fed with user defined data. Following tablesdisplay the existing Basic Types along with the supported data length:Cyclic send data (SIMOCODE pro > PLC)Cyclic receive data (PLC > SIMOCODE pro)The following table shows which Basic Type is supported by the different SIMOCODE proBasic Units:Basic Unit Basic Type 1 Basic Type 2 Basic Type 3SIMOCODE pro C - X -SIMOCODE pro S X X -SIMOCODE pro V X X -SIMOCODE pro V PN X X X'X' - supported, '-' - not supportedSelect the Basic Type which meets your requirements in HW-Config catalog. Please finddetailed information about the Basic Type in the system manuals for SIMOCODE prodevices.5.2 HW ConfigInput AddressRetrieve the input address of the SIMOCODE pro device:NoteNote down the input address or insert it in symbol table of HW-Config (Options > SymbolTable or Ctrl+Alt+T) for later usage.Each address in the symbol table should have a valid symbolic name.5.3 CFC 5.3CFCMaster data libraryFor using the library in a plant, it is recommended to store the templates of the SIMOCODEpro PCS 7 Library in the Master data library. Since this is beyond the scope of thisdocument, we recommend you to take a look at:With the templates stored in the Master data library, follow the below steps.CFC Template1.Open CFC-Editor by double clicking on the desired CFC-Object.2.Select the tab Libraries, located underneath the Catalog view. If the templates ofSIMOCODE pro PCS 7 Library were placed in the Master data library, you will find themin the project library folder (Notation: "Project Name"+"_Lib" e.g.:GS_SIMOCODEpro_Lib). Otherwise you will find the templates in the SIMOCODE proLibrary (e.g.: SMCPro_PCS7_LibV90SP1).5.3 CFC3.Expand the Master data library node ("ProjName" + "_Lib" e.g.: GS_SIMOCODEpro_Lib).You will find two nodes:–Blocks–Charts5.3 CFC4.Expand the Charts node. Now you will see the SIMOCODE pro PCS 7 Library templates.SIMOCODE pro Library supports following control functions:Control Function TemplateDahlander Starter DahlandDirect Starter DirectMolded Case Circuit Breaker MCCBOverload Relay OvlRlyPole-Changing Starter PoleChngPositioner 1~5 PositnerDahlander Reversing Starter RevDahlReversing Starter ReversePole-Changing Reversing Starter RevPolChSoft Starter with Reversing Contactor RevSoftStrStar-Delta Reversing Starter RevStarDelSoft Starter SoftStrSolenoid Valve SolValveStar-Delta Starter StarDel5.Drag the desired template object (e.g.: Direct) by pressing left mouse button and drop theobject in the Chart view.Direct template is now instantiated.5.3 CFCOpen the Template1.Right click on the instantiated Direct template in the chart view and select Open. Thetemplate opens in a new chart view.Set I/OInput1.Scroll to the left, till you see the sheet bar. There you will find a textual interconnectionnamed Input Word Address of Simocode base Module.Now you have two options:–Setting the HW input address manually, as seen in HW-Config–Use symbol table for selecting the input address.Since this is a short example, we will just hand over the devices input address as it isdisplayed in HW-Config. We recommend using the symbol table for large projects. Refer2.Right click on Input Word Address of Simocode base Module and select Interconnectionto Address.A symbol table like dialog opens.5.3 CFC 3.Insert input address, in this case: IW512.4.Confirm input value by pressing enter. Now the blocks input address is connected to thedevices input address.MMMeas, MMStat and MMLogIf you want to use measurement, statistic values and/or logbook (MMMeas, MMStat and MMLog) for the SIMOCODE pro device, you need to switch to sheet view 2 in the CFC plan. There you will find the additional blocks for the mentioned functions.Repeat the Interconnection to Address, steps from above for this sheet.NoteIf you do not want to use the additional functions, you are free to delete the function blocks in question or all blocks in sheet 2.Result: The basic block set up is now complete.5.3 CFCGenerate module drivers1.Go to Chart > Compile > Chart as Program or hit Ctrl+B or click in the toolbar. TheCompile dialog opens.2.Ensure that the option Generate module drivers is checked in.3.Confirm dialog with the OK-Button.After compilation has finished, the Logs dialog will be displayed.1.Confirm this dialog by Close button.2.Now hit F5 in the chart view. The view will be updated and all textual interconnections arereplaced by the according block interconnection.DownloadThe CFC-Template is now ready for download.Go to CPU > Download or hit CTRL+L or use in the toolbar.Result: Template set up is now complete and ready to use.5.4 Operator Station 5.4Operator StationOperator StationBlock icons and faceplates are inserted in the project while compiling the Operator Station(OS). Compile OS. You can find details on how to work with the Operator Station in theBlock IconsAfter activating WinCC you will find the APL block icon for the motor block:Activate Block iconsThis library is also shipped with block icon for MMOprtn. It is disabled by default setting. Ifyou need MMOprtn block icon you can simply activate it:1.Open CFC-Editor.2.Select the MMOprtn block.3.Right click and select Object Properties in the context menu.4.Check in the checkbox for Create block icon.5.4 Operator Station5.Confirm the Properties dialog by clicking OK.pile the OS and activate WinCC. Now you will find two block icons: MotL andMMOprtn.5.4 Operator Station The block icons in detail are:MotLMotor - Large MMOprtnSimocode pro Direct starter OperationThe block icons give a general feedback of the current device status to the user. Pleaseopen a faceplate for detailed information about the device by clicking on the block icon.FaceplatesStandard faceplates of the block icons:NoteFor further information on how to use the Library, refer the latest "Programming andOperating Manual for the "SIMOCODE pro PCS 7 Library" Block Library.APL - MotL5.4 Operator StationMMOprtnMMMeas5.4 Operator Station MMStatMMLog5.4 Operator StationFaceplate-ViewsEach faceplate provides multiple views:APLSIMOCODE pro LibraryMotL MMOprtn MMMeas MMStat MMLog • Standard • Messages • Trends • Parameters • Preview • Memo • Batch• Standard • Messages • Limits • Trends • Preview• Status diagnostics • Event diagnostics • Warning diagnos-tics • Trip diagnostics • Station diagnostics • Process image • Batch• Current • Voltage • Analog • Temperature • Messages • Trends • Preview • Batch• Standard 1 • Standard 2 • Messages • Preview • Batch• Standard • Messages • Logbook • Preview • BatchYou can switch between the single views by clicking the demanded view button.Click onto open additional view buttons.Faceplates may be pinned or closed according to the demands of the user. Furtherinformation on how to use the faceplates can be found in the online help, shipped with this library or in the user manual provided for this library.5.4 Operator StationNavigation between faceplates1.Open the Standard view of block MotL.2.Click on button Operation.MMOprtn faceplate opens.Click on navigation button to return to the calling faceplate.5.4 Operator Station3.Click on button Measurement to open the MMMeas faceplate.5.4 Operator StationMMStat1.Open the Standard view of block MotL.2.Click on button Operation.MMOprtn faceplate opens.Click on navigation button to return to the calling faceplate.5.4 Operator Station3.Click on button Statistic to open the MMStat faceplate.5.4 Operator StationMMLog1.Open faceplate MMOprtn and switch to view Preview.2.Click on button Operation.MMOprtn faceplate opens.Click on navigation button to return to the calling faceplate.5.4 Operator Station3.Click on button Logbook to open the MMLog faceplate.NoteClick on navigation button at the MMMeas, MMStat or MMLog faceplate to return to thecorresponding MMOprtn faceplate.References6More informationAdditional information can be found as follows:●● ● ● ● ●ReferencesList of Abbreviations 7 7.1AbbreviationsOverviewTable 7- 1 Meaning of abbreviationsAbbrevia-MeaningtionAS Automation stationCFC Continuous Function ChartEDD Electronic device descriptionGSD Generic Station DescriptionHMI Human machine interfaceHW Config "Hardware configuration" module in the SIMATIC ManagerOM Object managerOS Operator stationPCS 7 Process Control System 7CPU Central Processing UnitSS Soft starterList of Abbreviations 7.1 Abbreviations。
Ansys workbench Mech-Intro_14.0_L01_Intro 基础介绍

/customerportal/
Notes: If you are encountering difficulties with the ANSYS Customer Portal please click on the ANSYS Portal Help Support Request Form on the login page Online Technical Support for all ANSYS products, Mechanical/Fluent/CFX/Ansoft, is available through the ANSYS Customer Portal
• Training Courses are also available covering the use of other Workbench applications
(e.g. DesignModeler, Design Exploration, etc.) .
2
© 2011 ANSYS, Inc.
training courses visit
4
© 2011 ANSYS, Inc.
February 20, 2013
Release 14.0
B. ANSYS EKM - Engineering Knowledge Manager
• What is ANSYS EKM?
– ANSYS Engineering Knowledge Manager (EKM) is a web-based multi-user collaborative product that is aimed at meeting the simulation data and process management challenges faced by our customers. EKM is tightly integrated with other ANSYS simulation offerings and it can also be very easily integrated with other simulation codes including legacy and competitor’s software.
IEEE 1394 火线接口的设计
``FWDG 1.0TA03/02/2010 FireWire Design GuideAbstract: Guidelines for implementing FireWire (IEEE 1394) ports on both high level complex devices such as personal computers and simple devices such as inexpensive consumer electronics products. Includes references to normative specifi-cations as well as full reference designs that can be used as is or, with the careful consideration of the trade-offs, as a starting point for a more optimized design.FireWire Design Guide FWDG 1.0TA03/02/2010 1394 Trade Association Specifications are developed within Working Groups of the 1394 TradeAssociation, a non-profit industry association devoted to the promotion of and growth of the market forIEEE 1394-compliant products. Participants in Working Groups serve voluntarily and withoutcompensation from the Trade Association. Most participants represent member organizations of the 1394Trade Association. The specifications developed within the working groups represent a consensus of theexpertise represented by the participants.Use of a 1394 Trade Association Specification is wholly voluntary. The existence of a 1394 TradeAssociation Specification is not meant to imply that there are not other ways to produce, test, measure,purchase, market or provide other goods and services related to the scope of the 1394 Trade AssociationSpecification. Furthermore, the viewpoint expressed at the time a specification is accepted and issued issubject to change brought about through developments in the state of the art and comments received fromusers of the specification. Users are cautioned to check to determine that they have the latest revision of any1394 Trade Association Specification.Comments for revision of 1394 Trade Association Specifications are welcome from any interested party,regardless of membership affiliation with the 1394 Trade Association. Suggestions for changes indocuments should be in the form of a proposed change of text, together with appropriate supportingcomments.Interpretations: Occasionally, questions may arise about the meaning of specifications in relationship tospecific applications. When the need for interpretations is brought to the attention of the 1394 TradeAssociation, the Association will initiate action to prepare appropriate responses.Comments on specifications and requests for interpretations should be addressed to:Editor, 1394 Trade Association315 Lincoln, Suite EMukilteo, W A 98275USA1394 Trade Association Specifications are adopted by the 1394 Trade Association withoutregard to patents which may exist on articles, materials or processes or to otherproprietary intellectual property which may exist within a specification. Adoption of aspecification by the 1394 Trade Association does not assume any liability to any patentowner or any obligation whatsoever to those parties who rely on the specificationdocuments. Readers of this document are advised to make an independent determinationregarding the existence of intellectual property rights, which may be infringed byconformance to this specification.Published by1394 Trade Association315 Lincoln, Suite EMukilteo, WA 98275 USACopyright © 2010 by 1394 Trade AssociationAll rights reserved.Printed in the United States of AmericaFWDG 1.0TA FireWire Design Guide 03/02/2010IEEE CopyrightPortions of this specification are copied from published IEEE standards, by permission.The source documents are:IEEE Std 1394-1995, Standard for a High Performance Serial BusIEEE Std 1394a-2000, Standard for a High Performance Serial Bus – Amendment 1The IEEE copyright policy at /IPR/copyrightpolicy.html states, in part:Royalty Free PermissionIEEE-SA policy holds that anyone may excerpt and publish up to, but not more than, ten percent (10%) ofthe entirety of an IEEE-SA Document (excluding IEEE SIN books) on a royalty-free basis, so long as:1)proper acknowledgment is provided;2)the ‘heart’ of the standard is not entirely contained within the portion being excerpted.This included the use of tables, graphs, abstracts and scope statements from IEEE DocumentsFireWire Design Guide FWDG 1.0TA03/02/2010 ChecklistAll designers of devices with FireWire ports should look for the following:#2.1: Connectors (both plugs and sockets) shall meet the requirements laid out in the IEEE standards. (7)#2.2: Plugs shall have an overmold that includes strong tactile cues for orientation. (8)#2.3: Sockets should be oriented so that “thumb” part of plug is on top or on the left (9)#2.4: Sockets attached to a single PHY should be close together. (10)#2.5: FireWire 800 9-to-9 (1394b type 1) cable assemblies shields and ground shall not be shorted together. (10)#3.1: The wiring between the connector and the PHY (TP1 to TP2 and TP3 to TP4) shall be as short as possible. (14)#3.2: Ensure correct value for TPBIAS decoupling capacitor. (15)#3.3: Limit FW400 common mode choke to the minimum necessary to pass EMC (15)#3.4: Implement a transient protection circuit in a power provider to protect the PHY from late VG events. (15)#3.5: FireWire power should be current limited and filtered. (16)#3.6: VG must be capacitively connected to chassis ground and directly connected to PHY signal ground with minimal (pref-erably no) filtering. (16)#3.7: The socket shield shall be directly connected to chassis ground for all unisolated ports. (16)#3.8: The socket shield(s) shall be directly connected to VG at one place in the system. (17)#3.9: Systems that require isolated interfaces shall use a beta-only 1394b connection. (17)#3.10: FW800 ports should avoid common mode chokes. (18)#3.11: FW800 connector socket should internally bond the inner and outer shells. (18)#3.12: FW800 TPA and TPB shields have different termination requirements than each other and for FW400 shields. (18)#3.13: Ensure signal integrity of long traces to support front panel connectors. (18)#3.14: If a system has multiple PHYs and at least one of the PHYs has S800 or faster ports, then all the PHYs should be S800 or faster. (19)#4.1: Ensure that Power_class is set correctly. (21)#4.2: Ensure CONTENDER is deasserted (21)#4.3: Connect PCIe CLKREQ* (21)#4.4: TI PHY core voltage is 1.95V (22)#4.5: TI PHY core voltage filtering uses 1uF caps (22)#4.6: TI PHY oscillator voltage can be 1.95V (22)#4.7: Ensure correct PHY/LINK pin termination when using TI PHYs in repeater mode (22)#4.8: Ensure configuration and termination of unused port(s) on TI PHYs (22)#4.9: Ensure LKON/DS2 is correctly biased high or low (23)#4.10: Caution when TI 1394b PHY port 2 is unused or set to DS-only mode (23)#4.11: Note TI PHY max port speed is reported incorrectly for DS-mode only ports (23)#4.12: Use peaking inductors on bi-lingual ports on TI PHYs (23)#4.13: Tie PLLVDD_33 to the AVDD_3_3 power rail on TI PHYs. (23)#4.14: Ensure that TI PHY recommendations are met (23)#4.15: Connect Chex OHCI_PME# to a GPIO for optimal power management (23)#4.16: Ensure that Chex GRST# asserts only on link layer power cycle. (23)#4.17: Leave Chex GPIO’s as no-connects (24)#4.18: Bring Chex CYCLEOUT to a test point (24)#4.19: Connect VDD_33_AUX to 3.3V (24)#4.20: Ensure TI Link devices implementation requirements are met (24)#4.21: Ensure power is provided during sleep mode for TI Link devices. (24)#4.22: Ensure that G_RST* timing requirement is met (24)#4.23: G_RST* is asynchronous (24)#4.24: Ensure VAUX_DETECT is pulled high on FW643 (25)#4.25: Ensure FW643 power reset is stuffed consistently with regulation of 1.0V supply (25)#4.26: Ensure LSI integrated PHY/Link devices implementation requirements are met (25)#4.27: Ensure power is provided during sleep mode for LSI integrated PHY/Link devices. (25)#4.28: Ensure PME is uniquely identifiable to software for LSI FW323 v129. (25)#4.29: Internal or external pull-downs required on PHY/Link interface (27)#4.30: Special termination may be needed if PHY/Link propogation delay is > 1 ns (27)FWDG 1.0TA FireWire Design Guide 03/02/2010#5.1: All components and traces between the protection diode and the connector need to support 33V or higher. (29)#5.2: PHY operation should not be affected by power provider current limiter trips (29)#5.3: System operation of power providers should not be affected by power consumer inrush or shorts. (29)#5.4: Power Class 4 power providers should implement appropriate CSRs. (30)#5.5: Bus powered portable devices and peripherals should declare the appropriate power class. (30)#5.6: Power consumers should implement the power management CSRs. (30)#5.7: Ensure that CPS is correctly connected (32)#6.1: OHCI link must reliably meet real-time requirements under anticipated load. (40)FireWire Design Guide FWDG 1.0TA03/02/2010 Contents2. Mechanical (7)2.1 Connectors (7)2.2 End-to-end connections (10)3. Port design (14)3.1 Interfaces (14)3.2 Connector/PHY wiring (14)3.2.1 Termination (17)3.2.2 Front panel (“remote”) connector wiring guide (18)3.3 Testing Advice (19)4. System design (21)4.1 PHY selection (21)4.2 PHY configuration recommendations (21)4.2.1 General (21)4.3 Link layer recommendations (21)4.3.1 PCIe recommendations (21)4.4 Specific device recommendations (22)4.4.1 TI TSB81BA3 (22)4.4.2 TI XIO2213 (Cheetah Express, aka Chex) (23)4.4.3 Texas Instruments TSB82AA2 1394b link device (24)4.4.4 LSI FW643 (25)4.4.5 LSI FW323 (25)4.5 PHY/Link interface (27)4.5.1 Additional requirements (27)4.5.2 Layout guide (28)5. Cable power (29)5.1 Introduction (29)5.2 FireWire power checklistrecommendations (29)5.3 FireWire device guidelines (30)5.4 Example Circuits (31)5.4.1 Desktop alternate power provider (33)5.4.2 Desktop primary power provider with backup power pass-through (34)5.4.3 Portable computer (35)5.4.4 Peripherals or mobile devices (36)5.5 Notes (37)5.5.1 Power Classes (for reference) (37)5.5.2 Note on diode protection (37)5.5.3 Use of Power Down and Cable Not Active (38)5.5.4 Trade Association Cable Power Distribution Specification - proposed variations (39)6. Link selection (40)6.1 OHCI requirements (40)6.2 Target devices (40)6.2.1 Asynch peripherals (40)6.2.2 Media/consumer electronics (40)FWDG 1.0TA FireWire Design Guide 03/02/20107. Firmware/higher layers (41)7.1 Basic node operation (41)7.1.1 Bus initialization (41)7.1.2 Configuration ROM (41)7.1.3 Isochronous Resource Manager (41)7.1.4 Bus Manager (42)7.1.5 Required performance (42)7.1.6 Interoperability issues (42)7.2 Mass storage devices (42)7.2.1 SBP profile (42)7.2.2 A V profile (42)7.3 Imaging devices (42)7.3.1 Printers (42)7.3.2 Scanners (42)7.3.3 Still image cameras (42)7.3.4 Machine vision cameras (42)7.4 Consumer electronics (43)7.4.1 Tape recorders (43)7.4.2 Televisions (43)7.4.3 Set top boxes (43)7.4.4 Disks (43)7.4.5 Audio equipment (43)7.5 Professional (43)7.5.1 Audio (44)7.5.2 Video (44)7.6 Automobile (44)7.7 Industrial/Instrumentation (44)8.1 Layout recommendations for S800 1394b TSB81BA3 Physical Layer: (51)9. Firewire Design Guide – Robust Port Design (57)12.1 Conformance terminology (75)12.2 Technical glossary (75)FiguresFigure2-1— Plug overmold (8)Figure2-2— Socket orientation (as viewed from outside of bulkhead) (9)Figure2-3— Legacy socket orientation (as viewed from front of product) (9)Figure2-4— 1394b type 1 cable assembly and schematic (Beta plug to Beta plug) (11)Figure2-5— 1394b type 2 cable assembly and schematic (Legacy 6 circuit plug to Bilingual plug) (12)Figure2-6— 1934b type 3 cable assembly and schematic (Legacy 4-circuit plug to Bilingual plug) (13)Figure3-1— Measurement points (half connection is shown) (14)Figure5-1— A multiport Power Provider class 1/2/3 node (32)Figure5-2— A multiport Power Provider class 4 node (33)Figure5-3— A multiport Power Provider class 1/2/3 node, operating as Class 4 when power is not available (34)Figure5-4— A multiport Alternate Power Provider class 4 node (35)Figure5-5— A single port bus-powered (class 4) node (36)Figure5-6— A multiport bus-powered (class 4) node (36)Figure5-7— Diodes to provide power management domains (38)Figure8-1— Example FW800 OHCI Controller (46)Figure10-1— Example extendible two port power management IC (72)Figure10-2— Using multiple two port power management ICs (73)TablesTable2-1— Insertion and removal force (tentative) (7)Table2-2— 1394b type 1 (Beta to beta) end-to-end connections (11)Table2-3— Legacy 6 circuit to 1394b Bilingual end-to-end connections (12)Table2-4— Legacy 4 circuit to 1394b Bilingual end-to-end connections (13)Table3-1— 1394b receiver characteristics (14)Table4-1— Phantom cycles caused by MI cycle reflection (27)Table5-1— Power class (37)2.2.1ConnectorsItem #2.1:Connectors (both plugs and sockets) shall meet the requirements laid out in the IEEE stan-dards.Sockets must strongly resist “backwards” insertionThis means that the “narrow” part of the socket shall not have a split unless there is a mechanical reinforcement that pre-vents the narrow end from spreading when a plug is inserted backwards. It further means that the mechanical tolerences specified in [2], [3], and [4] must be met. In particular, the socket should meet the following insertion force requirements:Table2-1—Insertion and removal force(tentative)Condition Insertion/removalforceComment6-pin plug correctly aligned inserted into 6-pin socket9-pin plug correctly aligned inserted into 9-pin socket < 1 N measured using a plug that is at the maximum dimensions allowed by 1394, andmaximum value before any of the VG, VP, or TPx contactsmate, andmust have a noticeable “click” or “snap” when fully inserted6-pin plug correctly aligned removed from 6-pin socket9-pin plug correctly aligned removed into 9-pin socket > 1 N measured using a plug that is at the minimum dimensions allowed by 1394, andminimum value before any of the VG, VP, or TPx contactsseparate, andmust have a noticeable “click” or “snap” when removed6-pin plug reverse aligned inserted into 6-pinsocket9-pin plug reverse aligned inserted into 9-pinsocket > 10 N measured using a plug that is at the minimum dimensions allowed by 1394, andminimum force before any of the VG, VP, or TPx contactsmate, andsocket must be noticeably damaged by reverse insertion(allows diagnosis of improper use)Item #2.2:Plugs shall have an overmold that includes strong tactile cues for orientation.Overmold cues are to provide hints for where the user should put the thumb.a)Flat surface corresponds with “flat” surface on narrow axis b)Round surface corresponds with “angled” surface on narrow axisThis will assist in preventing attempted backwards connection (particularly if the connector placement rules described below are followed).Figure 2-1—Plug overmoldLegacy 6-pinBeta/bilingual 9-pinFWDG 1.0TA FireWire Design Guide 03/02/2010Item #2.3:Sockets should be oriented so that “thumb” part of plug is on top or on the leftSockets should have a standard orentation to aid the “blind” insertion of the plug. Since the plug overmold has features to encourage the placement of the thumb in a particular spot, and most people prefer to put their thumb on top of a plug as they insert it, the socket itself should be oriented so that the “thumb” feature is on top as viewed looking at the bulkhead from the outside. And since most people are right handed,. the alternate positioning should have the “thumb” feature on the left. Figures 2-2 and 2-3 illustrate the concept.Figure2-2—Socket orientation (as viewed from outside of bulkhead)... or as viewed from the front of a hypothetical product:Figure2-3—Legacy socket orientation (as viewed from front of product)FireWire Design Guide FWDG 1.0TA03/02/2010 Item #2.4:Sockets attached to a single PHY should be close together.Connectors, PHY, protection and termination components for a single port are best seen as a lumped circuit. The min. rise time for 1394a is 0.5 ns which implies 1 GHz waveforms, while the min. rise time for 1394b is 0.080 ns, over 6 GHz! If both front and back panel sockets are desired, then there are two choices:a)separate PHYs for front and back (two PHYs and one Link), orb) a very carefully designed “remote” socket where the entire path from the PHY termination network (seeclause3.2.2) to the socket is within 1394 requirements (110 ± 6 Ω differential mode and 33 ± 6 Ω common mode, more details in [2]). Note that this is quite unlikely to be successful for a S800 or faster port.2.2End-to-end connectionsItem #2.5:FireWire 800 9-to-9 (1394b type 1) cable assemblies shields and ground shall not be shorted together.Since the new 1394b connections are unfamiliar with designers, the end-to-end connections for the various 1394b cables are described in figure2-4, table2-2, figure2-5, table2-3, figure2-6 and table2-4.FWDG 1.0TA FireWire Design Guide03/02/2010NOTE—The legacy interface cables (type 2 9-to-6 and type 1 9-to-4) do short some of the shields and ground together. It is important that this be done correctly for each cable type.NOTE—Cable as defined in 1394b. Connectors are viewed as looking at the front plug face.Figure 2-4—1394b type 1 cable assembly and schematic (Beta plug to Beta plug)Table 2-2—1394b type 1 (Beta to beta) end-to-end connectionsSignal PCB pad Socket/plug name Socket/plug connection Cable Socket/plug connection Socket/plug name PCB pad SignalChassis Ground 13Chassis GroundOuter shell(no connect)Outer shell Chassis Ground12Chassis Ground Chassis Ground, HF to Logic Ground 11Cable Shield Ground Inner shell Outer shieldInner shellCable Shield Ground 10Chassis Ground, HF to Logic Ground TPA4TPA 4Signal pair #1 red2TPB 2TPB High frequency to Logic Ground 5TPA(R)5Signal pair #1 shield 9TPB(R)9Logic Ground TPA*3TPA*3Signal pair #1 green 1TPB*1TPB*Logic Ground 6VG 6Power pair #1 white 6VG 6Logic Ground (no connect)7SC 7(no connect)7SC 7(no connect)FW PWR 8VP 8Power pair #1 black 8VP 8FW PWR TPB 2TPB 2Signal pair #2 blue4TPA 4TPALogic Ground 9TPB(R)9Signal pair #2 shield 5TPA(R)5High frequency to Logic Ground TPB*1TPB*1Signal pair #2 orange 3TPA*3TPA*Chassis Ground, HF to Logic Ground 10Cable Shield Ground Inner shell Outer shieldInner shellCable Shield Ground 11Chassis Ground, HF to Logic Ground Chassis Ground12Chassis GroundOuter shell(no connect)Outer shellChassis Ground13Chassis Ground743215689743215689plug 1plug 2FireWire Design GuideFWDG 1.0TA 03/02/2010NOTE—Cable (reference) IEEE Std 1394-1995. Connectors are viewed as looking at the front plug face.Figure 2-5—1394b type 2 cable assembly and schematic (Legacy 6 circuit plug to Bilingual plug)Table 2-3—Legacy 6 circuit to 1394b Bilingual end-to-end connectionsSignalPCB padSocket/plug nameSocket/plug connectionCable Socket/plug connection Socket/plug name PCB pad Signal (no connect)Outer shell Chassis Ground12Chassis Ground Chassis Ground, HF to Logic Ground Cable Shield Ground Plug shell Outer shieldInner shellCable Shield Ground 10Chassis Ground, HF to Logic Ground TPA 6TPA 6Signal pair #1 red 2TPB 2TPB Logic Ground 2VG 2Signal pair #1 shield 9TPB(R)9Logic Ground TPA*5TPA*5Signal pair #1 green 1TPB*1TPB*Logic Ground2VG2Power pair #1 white 6VG 6Logic Ground (no connect)7SC 7(no connect)FW PWR 1VP 1Power pair #1 black 8VP 8FW PWR TPB 4TPB 4Signal pair #2 blue 4TPA 4TPALogic Ground 2VG 2Signal pair #2 shield 5TPA(R)5High frequency toLogic Ground TPB*3TPB*3Signal pair #2 orange 3TPA*3TPA*Chassis Ground, HF to Logic GroundCable Shield Ground Plug shell Outer shieldInner shellCable Shield Ground 11Chassis Ground, HF to Logic Ground (no connect)Outer shellChassis Ground13Chassis Ground432156743215689plug 1plug 2NOTE—Cable (reference) IEEE Std 1394a-2000. Connectors are viewed as looking at the front plug face.Figure 2-6—1934b type 3 cable assembly and schematic (Legacy 4-circuit plug to Bilingual plug)Table 2-4—Legacy 4 circuit to 1394b Bilingual end-to-end connectionsSignalPCB padSocket/plug nameSocket/plug connectionCable Socket/plug connection Socket/plug name PCB pad Signal (no connect)Outer shell Chassis Ground12Chassis Ground (no connect)Outer shieldInner shellCable Shield Ground 10Chassis Ground, HF to logic Ground TPA 4TPA 4Signal pair #1 red 2TPB 2TPB Logic Ground ShellPlug shell Signal pair #1 shield 9TPB(R)9Logic Ground TPA*3TPA*3Signal pair #1 green 1TPB*1TPB*(no connect)6VG 6Logic Ground (no connect)7SC 7(no connect)(no connect)8VP 8FW PWR TPB 2TPB 2Signal pair #2 blue 4TPA 4TPALogic Ground ShellPlug shell Signal pair #2 shield 5TPA(R)5High frequency to Logic Ground TPB*1TPB*1Signal pair #2 orange 3TPA*3TPA*(no connect)Outer shieldInner shellCable Shield Ground 11Chassis Ground, HF to logic Ground (no connect)Outer shellChassis Ground13Chassis Ground4321plug 1743215689plug 23.There are a number of good 1394 port design application notes. The TI notes on EMI [11] and layout [12] as well as the LSI design guide for the FW323 [13] are particularly good. Every designer of FireWire systems should be familiar with these documents. Much of the following is derived from those application notes.3.1InterfacesAll interface specifications apply at the points of entry and exit from the equipment. The interface specifications may be “valid” at other places. These points are identified as points TP2 and TP3 as shown in Figure 3-1. The specifications assume that all measurements are made after a mated connector pair, relative to the source or destination. TP1 and TP4are reference points for use by implementors to specify vendor components. In particular, PHY IC specs apply at TP1 for transmit and TP4 for receive.The reference points for all connections are those points TP2 and TP3 at the transitions between the cabinet and the cable shield. If sections of transmission line exist within the cabinet shield, they are considered to be part of the associated transmit or receive network, and not part of the cable plant.NOTE—Do not confuse “TPn” where “n” is the number one through four with the “TPx” where “x” is “A” or “B”. TPn refers to a test point and TPx refers to a twisted pair signal.3.2Connector/PHY wiringItem #3.1:The wiring between the connector and the PHY (TP1 to TP2 and TP3 to TP4) shall be as short as possible.The TPA and TPB pairs carry very high speed signals, and so must be imlemented using good design practices for high speed circuits and interfaces to external devices. The impedance requirements for the connector/PHY wiring shall meet 1394b requirements (included below for reference).Figure 3-1—Measurement points (half connection is shown)Table 3-1—1394b receiver characteristicsParameterS400βS800βS1600βUnitsInput impedance test conditions:TDR rise time 10010050ps Exception window a 700700700psInput impedance @ TP3:Through connection b 110 ± 20110 ± 20110 ± 20ΩAt termination c110 ± 10110 ± 10110 ± 10ΩTRANSMIT NETWORKRECEIVE NETWORKT+T-R+R-TP1TP2TP3TP4PHYPHYNOTE—1394 bilingual and FW400 ports have transmitter and receiver on both the TPA and TPB signals, so the receiver input impedance spec applies for both pairs.3.2.0.1TerminationThe TPA pair has the required 110 ¾ differential termination as close as possible to the PHY, with the center point of the termination attached to the PHY’s bias output for that port and capacitively to signal ground (each port on the PHY shall have an independent bias output – this is required to prevent a short on one port from causing all the other ports to not operate).Item #3.2:Ensure correct value for TPBIAS decoupling capacitor.The PHY’s tpbias output should be decoupled with a 0.33 μF capacitor to ground, unless the PHY is a TI PHY. TI PHYs need a 1.0 μF to ground, so as to guarantee a minimum ripple on the tpbias voltage under a worst-case speed-signaling scenario, which is necessary in the TI design to maintain stability of the tpbias driver. The lower value is needed when using non-TI PHYs in order to meet the 1394a timing specification for tpbias assertion and deassertion.3.2.0.2TP EMC/EMI protectionItem #3.3:Limit FW400 common mode choke to the minimum necessary to pass EMCFW400 ports may need a high speed common mode choke, particularly if the PHY-to-connector layout is long or runs near possible signal sources. Individual components must be used for each signal pair to limit crosstalk between TPA and TPB. The choke must allow the lower fequency common mode speed signals to get through (while removing high fre-quency common mode signals). In general, this means that the common mode impendence must be less than 165 Ohms at 100 MHz, and the differential impedence less than 15 ohm at 100 MHz.Products should use the minimum choke necessary to pass EMC. The design should anticipate evaluation of EMC com-pliance with several values (for example, the Murata DLP11SN range starts at 67 Ohms, with variants at 90 Ohms, 120Ohms and 160 Ohms), and with not using a common mode choke at all. This can be achieved by designing the layout to allow a common mode choke or a 0 Ohm resistor.3.2.0.3Transient protectionItem #3.4:Implement a transient protection circuit in a power provider to protect the PHY from late VG events.Power providers should have a diode clamping network between the PHY and the socket to provide two functions:a)ESD protection so that the high voltage is drained to the chassis, andDifferential skew5%5%5%UI Common mode input impedance> 550Ωa.Within the Exception-window no single impedance excursion shall exceed the Through-connection impedance tolerance for a period of twice the TDR rise time specification.b.Through connection impedance describes the impedance tolerance through a mated connector. This tolerance is greater than the termination or cable impedance due to limits in the technology of the connectors.c. The input impedance at TP3, for the termination, shall be recorded 4.0ns following the electrical reference plane determined by the receptacle on the receiver bulkheadTable 3-1—1394b receiver characteristicsParameterS400βS800βS1600βUnitsFireWire Design Guide FWDG 1.0TA03/02/2010 b)“Late VG” protection (so called because the power provided on VP can appear on the TPx signals if the VGconnection takes place after the VP and at least one of the TPx connections is completed). Note that this last function requires that chassis ground and signal ground have a low resistance connection somewhere (see Item #3.8:below).The high side clamp diodes use a 3.6V nominal zener diode prebiased with a 3.3V source via a 330 Ohm current liminting resistor (other sources may be used with an appropriate resistor value). This provides a nominal 2.4V, worst case 2.1V ESD and late-VG rail to the BAV99 diodes. In turn, allowing for a 0.6V drop through the diodes, this will permit FireWire signaling at up to 2.7V without compromising signal integrity. A late-VG event on the signal pairs will be drained back to ground via the Zener diode. Late VG events can be of a long duration, and they represent a return path for the VP supply, so the current must be directed back to VG. Despite its rating, the recommended Zener has been mea-sured as being capable of sustaining a current of 300mA, up to 2W, keeping the voltage level on the signal pins to less than 5.5V, which the PHY is also able to tolerate. Under more stress, either the PHY fails or the Zener. The Zener tends to fail short, which results in the TPA/TPB pairs being held to GND and preventing FireWire operation. Lower voltage Zeners, which have been used in some designs, tend to fail before the PHY, increasing the system return rate unnecessar-ily.ESD events are of a short duration and will be drained from digital ground to chassis ground and from there to earth ground. It is acceptable to use signal ground instead of chassis ground for the transient protection network since signal ground is capacitively connected to chassis ground at the connector. This can only be done if there is no ferrite on the VG path (see Item #3.6:below). The galvanic connection between chassis ground and signal ground must be low impedance at the frequencies not handled by the capacitive connection at the connector.If a common mode choke is used, then the transient supression network should be placed on the PHY side of the choke. The advantage of having the diodes on the PHY side is that the common mode choke can be placed closer to the connec-tor for better EMI performance.Late-VG does not occur on self powered devices.Transient protection iodes must have a very low capacitance (less than 0.5 pF).3.2.0.4Power and ground interface (VG/VP)Item #3.5:FireWire power should be current limited and filtered.VP should be current limited 1.5 A and EMI filtered to minimize system noise getting out to peripherals. Current limit can be done using a polyfuse, although their slow trip speed requires careful thought put towards the effect of momentary excess current draw. A choke between 50 ohm and 1000 ohm (at 100 MHz) is acceptable in the path for EMI filtering and should be located close to the sockets. A 0.010µf capacitor should connect to chassis ground immediately next to the socket.Item #3.6:VG must be capacitively connected to chassis ground and directly connected to PHY signal ground with minimal (preferably no) filtering.VG should AC connect to chassis ground immediately next to the socket using a 0.010µf capacitor. There must not be a significant impedance in the path between VG and the PHY signal ground since VG is the return path for the common mode speed signalling sent out on TPB and received on TPA. If a filter is implemented, it should be designed to pass the speed signal (100-120ns pulse of about 20ma on VG). Usually this means any ferrite in the VG path must be 50 ohm or less at 100 MHz.3.2.0.5Shield interfaceItem #3.7:The socket shield shall be directly connected to chassis ground for all unisolated ports.There should be a chassis ground plane underneath the socket for this purpose. The galvanic isolation options defined in 1394a and 1394-1995 should no longer be used.。
MICAPS4帮助文档
目录
0 快速入门手册.........................................................................................................................6 0.1 安装.............................................................................................................................. 6 0.2 快速配置......................................................................................................................6 0.2.1 数据源配置.......................................................................................................6 0.2.2 综合图配置.......................................................................................................7 0.2.3 单站雷达默认配置(工具栏)...................................................................... 9 0.2.4 模式剖面默认配置(工具栏)...................................................................... 9 0.2.5 累积降水默认配置(工具栏).................................................................... 10 0.2.6 表格数据默认配置(工具栏).....................................................................11 0.2.7 模式探空默认配置.........................................................................................11 0.2.8 基础地图信息配置.........................................................................................12 0.2.9 交互层“另存为”保存................................................................................ 13 0.2.10 系统启动配置与出图配置.......................................................................... 14 0.2.11 传真图配置.................................................................................................15
Clonezilla Basics for Windows Embedded说明书

Clonezilla Basics for Windows EmbeddedBy Sean D. Liming and John R. MalinAnnabooks –August 22, 2014Cloning a master image for mass production is an important step for Windows Embedded Standard and Windows Embedded Industry. First, the image must be rolled back to create the master, which is accomplished using sysprep. Here is an example command:Sysprep /generalize /oobe /shutdown /unattend:c:\myunattend.xmlThe unattended XML file is a small answer file that handles several of the Out-of-Box Experience (OOBE) screens as well as accounts, run–time key, computer names, etc. There are those that say you don’t need sysprep, but failure to run sysprep and just copy the image can run into technical consequences. In short, one must run sysprep to duplicate the image.Once the image has been rolled back, the next step is to capture the master image for deployment to other systems. The books: Starter Guide for Windows® System Image Manager, Professional's Guide To Windows® Embedded 8 Standard, and Professional's Guide To Windows® Embedded Standard 7 - 2nd Edition cover creating the unattended file and running sysprep, but what is not covered is an actual full disk capture utility. There are several hardware disk duplication solutions for hard drive and compact flash cards. International Microsystems I nc. and Logicube are two companies that offer hardware duplication products. . There are also software solutions, but some of the most popular like Norton Ghost are going end-of-life in favor of licensed server-based solutions. Microsoft has solutions to capture partitions into WIM files, but when multiple partitions need to be captured, the WIM file solution is very cumbersome. Simple and inexpensive software image capture solutions are becoming hard to find. Luckily, the Linux community has developed a solution called Clonezilla that captures full disk images; and best of all, it is a free solution that can be used to capture a Windows Embedded master image.This paper walks through the steps to create a Clonezilla disk to capture and deploy a Windows Embedded master disk image. You will need two USB flash disks. One will hold the Clonezilla boot disk image (USB disk size 8 GB), and the other will hold the captured image (USB flash disk size 32 GB or greater recommended).Note: This paper is based on Clonezilla 2.2.3-25 live image. The steps and pictures will be different for later versions.Generate Clonezilla boot diskWe start on the development machine, and download a utility to help create the Clonezilla boot disk.1. Download Tuxboot from . The actual download comes from SourceForge.2. Format the smaller USB flash disk as FAT 32. Format the larger flash disk as exFAT.3. Plug the smaller USB flash disk into the development machine and run Tuxboot.4. The Tuxboot application will start. Make sure that clonezilla_live_stable is selected forthe On-Line Distribution. Also, point to the correct USB flash drive.5. Click OK to start the process. The Clonezilla ISO will be downloaded, mounted locally,and then copied over to the flash disk.6. Do not reboot when asked. Just Exit Tuxboot.7. Safely eject the USB flash drive.Capture Disk ImageNow, we move to the target system that holds the master image.1. Plug the Clonezilla boot disk that we just created into the target system.2. Boot the target and make sure the BIOS is set up to boot from the USB flash disk.3. The Clonezilla boot screen appears. Select Clonezilla Live (Default settings, VGAXXXxYYY) and hit Enter.4. The OS will load. Select English as the language to use and hit Enter.5. Keep the default Don’t touch keymap and hit Enter.6. The default Start_Clonezilla Start Clonezilla should be selected, hit Enter.7. In the next menu, select device-image work with disks or partitions using images asthe operation mode and hit Enter.8. The next menu is for the image directory. Keep the default, local_dev, and hit Enter.9. Insert the larger USB flash disk when prompted, wait about 5 seconds, and then hitEnter.10. The system will mount and prepare the UBS flash disk for the image. You will be askedfor the home directory to store the image. Select the USB flash disk image (sdx1) and hit Enter.11. The top directory is the default, hit Enter.12. A summary will appear, hit Enter.13. The clone wizard starts. Select Beginner and hit Enter.14. The Select Mode screen appears. Select save disk, and hit Enter.15. An image name with date has been started. Rename the image as you like. For example“Annabooks-2014-08-18-19-img”, hit Enter.16. The hard disk will be selected as the default source. Hit Enter.17. Select Skip checking/repairing source file system, hit Enter.18. Check save disk image option appears, the default is Yes, check the saved image. HitEnter.19. Hit Enter to continue.20. Click y at the prompt and hit Enter to begin the backup process.21. The capture and check process takes several minutes depending on image size. HitEnter when completed22. Select Poweroff to Power down the system, and hit Enter.23. Remove both flash disks after the target powers down.Deploy the Captured Disk ImageThe two USB disks to capture the image can now be used to deploy the image to other systems.1. Plug the Clonezilla boot disk into the target system.2. Boot the target and make sure the BIOS is setup to boot from the USB flash disk.3. The Clonezilla boot screen appears. Select Clonezilla Live (Default settings, VGAXXXxYYY) and hit Enter.4. The OS will load. Select English as the language to use and hit Enter.5. Keep the default Don’t touch keymap and hit Enter.6. The default Start_Clonezilla Start Clonezilla should be selected, hit Enter.7. In the next menu, select device-image work with disks or partitions using images asthe operation mode and hit Enter8. The next menu is for the image directory. The default is for local_dev, hit Enter.9. Insert the larger USB flash disk when prompted, wait about 5 seconds, and then hitEnter.10. The system will mount and prepare the UBS flash disk for the image. You will be askedfor the home directory to store the image. Select the USB flash disk image (sdx1) and hit Enter.11. The top directory is the default, hit Enter.12. A summary will appear, hit Enter.13. The clone wizard starts. Select Beginner and hit Enter.14. The Select Mode screen appears. Select restoredisk and hit Enter.15. The system will search the disk for an image. Since there is only one image on the disk, itis already select, so hit Enter.16. Select the hard drive and hit Enter.17. Hit Enter again.19. One more time, enter y at the prompt and hit Enter.20. The process can take several minutes. Hit Enter when completed.21. Select to Poweroff to power down the system, and hit Enter.22. Remove both flash disks after the target powers down.23. Boot the system again and let the Windows cloning process run on the system.Once the master Clonezilla image has been created, it can be deployed any number of times to identical target hardware systems. This could easily be incorporated as part of the manufacturing process for an embedded system product.。
PRIMERGY BladeFrame系统配置器和订单信息指南说明书
PRIMERGY BladeFrame System configurator and order-information guide June 2012ContentsInstructionsConfiguration diagramConfigurator0System softwareI System Unit BF200II System unit BF400 S2III Upgrade System Unit BF400IV Dual (Intel) Processing Blades (BFi20)V Dual (AMD) Processor Blades (BFa20)VI Quad (Intel) Processind Blades (BFi40))VII Quad (AMD) Processing Blades (BFa40)VIII Dummy Processing BladeChange reportPRIMERGY ServerInstructionsThis document contains basic product and configuration information that will enable you to configure your system viaSystem-Architect.Only the tool "System-Arcitect" will ensure a fast and proper configuration of your PRIMERGY server or your complete PRIMERGY Rack system.Please pay attention to the naming conventions: BF400 S2System unit with up to 24 Processing Blades,improved performance, power options and housingBF200System unit with up to 6 Processing BladesBFi202-way Processing Blade, (Intel)BFi20S5/62-way Processing Blade, Quad Core CPUs (Intel)BFa202-way Processing Blade, (AMD)BFa20S22-way Processing Blade, Dual Core CPUs (AMD)BFi404-way Processing Blade, (Intel)BFi40S24-way Processing Blade, Dual Core CPUs (Intel)BFa404-way Processing Blade, (AMD)BFa40S24-way Processing Blade, Dual Core CPUs (AMD)You can configure your individual PRIMERGY BladeFrame system in order to adjust your specific requirements.The System configurator is divided into several chapters that are identical to the current price list and PC-/ System-Architect.Please follow the lines. If there is a junction, you can choose which way or component you would like to take. Go throughthe configurator by following the lines from the top to the bottom.Please note that there are information symbols which indicate necessary information.For further information see:/products/standard_servers/index.html(internet)https:///com/order-supply/configurators/primergy_config/current/Pages/default.aspx(extranet)Prices and availability see price list and PC-/ System-ArchitectSubject to change and errors exceptedFujitsu Technology Solutions x86 PRIMERGY Server 2 of 20Configuration diagram BF200 BladeFrame chassis incl. Control BladesSystem Unit BF200 ( I )Blade plane with connectors at the rear sideBright color: includeddark color: configurableExtension slots front sideS l o t 5: P r o c e s s i n g B l a d e (o r D u m m y P r o c e s s i n g B l a d e )S l o t 6: P r o c e s s i n g B l a d e (o r D u m m y P r o c e s s i n g B l a d e )S l o t C 2: C o n t r o l B l a d e w i t h s w i t c hS l o t C 1: C o n t r o l B l a d e w i t h s w i t c hS l o t 1: P r o c e s s i n g B l a d e (o r D u m m y P r o c e s s i n g B l a d e )S l o t 2: P r o c e s s i n g B l a d e (o r D u m m y P r o c e s s i n g B l a d e )S l o t 3: P r o c e s s i n g B l a d e (o r D u m m y P r o c e s s i n g B l a d e )S l o t 4: P r o c e s s i n g B l a d e (o r D u m m y P r o c e s s i n g B l a d e )Fujitsu Technology Solutions x86 PRIMERGY Server3 of 20Configuration diagram BF400 S2 BladeFrame chassis incl. Control BladesSystem Unit BF400 S2 ( II )Bright color: included dark color: configurableFujitsu Technology Solutions x86 PRIMERGY Server 4 of 20Alternative C (for Demo System)Alternative D (for Evaluation System)Fujitsu Technology Solutions x86 PRIMERGY Server 5 of 20Fujitsu Technology Solutions x86 PRIMERGY Server 6 of 20Fujitsu Technology Solutions x86 PRIMERGY Server7 of 20Fujitsu Technology Solutions x86 PRIMERGY Server8 of 20Fujitsu Technology Solutions x86 PRIMERGY Server9 of 20Fujitsu Technology Solutions x86 PRIMERGY Server10 of 20System configurator and order-information guidePRIMERGY BladeFrame Status: 2012-05-30 Change Report。
CFX11_Customizing_WS1_Profile

ANSYS, Inc. Proprietary © 2008 ANSYS, Inc. All rights reserved.
W1-2
August 26, 2008 Inventory #002568
Workshop 1: Inlet Velocity Profile
Opening an Existing Case File
Training Manual
•
•
2. Copy the ucf_template.F file in the /examples folder to your working directory
ANSYS, Inc. Proprietary © 2008 ANSYS, Inc. All rights reserved.
2008 International ANSYS Conference
Training Manual
Customizing CFX
Workshop 1: Setting an Inlet Velocity Profile with User Fortran
ANSYS, Inc. Proprietary © 2008 ANSYS, Inc. All rights reserved.
W1-3
Training Manual
•
•
ANSYS, Inc. Proprietary © 2008 ANSYS, Inc. All rights reserved.
August 26, 2008 Inventory #002568
Workshop 1: Inlet Velocity Profile
1. Start by opening the CFX case file backstep.cfx in CFX-Pre
(整理)ANSYS Workbench 14.0超级学习手册(第1章).
第1章ANSYS Workbench 14.0概述本章从总体上对ANSYS Workbench 14.0自带软件包括结构力学模块、流体力学模块等进行概述,同时对ANSYS Workbench 14.0最新整合的其他模块进行简单介绍,其中包括低频电磁场分析模块Ansoft Maxwell、多领域机电系统设计与仿真分析模块Ansoft Simplorer、疲劳分析模块nCode及复合材料建模与后处理模块ACP等。
同时,本章还以SolidWorks 软件为例,介绍Workbench 14.0与常见的CAD软件进行集成的步骤及方法。
学习目标:(1)了解ANSYS Workbench软件各模块的功能;(2)掌握ANSYS Workbench软件与SolidWorks软件的集成设置;(3)掌握ANSYS Workbench平台的常规设置,包括单位设置、外观颜色设置等。
1.1 ANSYS软件简介ANSYS提供广泛的工程仿真解决方案,这些方案可以对设计过程要求的任何场进行工程虚拟仿真。
全球的诸多组织都相信ANSYS为它们的工程仿真软件投资带来最好的价值。
ANSYS软件是融结构、流体、电场、磁场、声场分析于一体的大型通用有限元分析软件。
由世界上最大的有限元分析软件公司之一、美国ANSYS公司开发,它能与多数CAD 软件接口,实现数据的共享和交换。
软件主要包括3个部分:前处理模块,分析计算模块和后处理模块。
(1)前处理模块提供了一个强大的实体建模及网格划分工具,用户可以方便地构造有限元模型。
(2)分析计算模块包括结构分析(线性分析、非线性分析和高度非线性分析)、流体动力学分析、电磁场分析、声场分析、压电分析以及多物理场的耦合分析,可模拟多种物理介质的相互作用,具有灵敏度分析及优化分析能力。
(3)后处理模块可将计算结果以彩色等值线显示、梯度显示、矢量显示、粒子流迹显示、立体切片显示、透明及半透明显示(可看到结构内部)等图形方式显示出来,也可将计算结果以图表、曲线形式显示或输出。
安世亚太培训-_基本分析流程_材料定义_CAD模型导入

– … 或者在 CAD 系统上打开
2-3
Basics
C. 基本分析步骤
• 分析的目的是确定基于一些激励或加载类型系统下的响应。 • 数学模型:
– CAD 几何模型是理想的物理模型 – 网格模型是一个CAD模型的数学表达方式 – 计算求解的精度取决于各种因素:
• 如何很好的用物理模型代替取决于怎么假设。 • 数值精度是由网格密度决定。
预处理
求解
– 求解模型 – 后处理
• 检查结果 • 检查求解的合理性
后处理
2-5
Basics
D. Engineering Data
• The Engineering Data的应用提供了对材料属性的全面控制。
– Engineering data 是每项工程分析的必须部分。 – Engineering data 可以单独打开 (作为分析项目的开始)。
• 保持双向互联性
2-14
Basics
…关联CAD模型
• 双向更新
– 更新CAD软件包中几何模型参数或
Training Manual
– 更新DesignModeler的详细信息面板中CAD参数
2-15
Basics
X.导入CAD文件
• File>Import External Geometry File…
– 激活面控制着“装配”模型所放置的位置(多个实体) – 输入类型详细面板中的操作:添加,去除,切分等 – 不保持互动性
Training Manual
激活平面
操作
文件类型
2-16
Basics
Y.导入定位
• 导入和链接都有“基准面”特性。
– 指定输入或链接模型的参考平面(定位)…
扩展回归模型手册说明书

Contents Intro.................................Introduction to extended regression models manual Intro1.........................................An introduction to the ERM commands Intro2....................................................The models that ERMsfit Intro3................................................Endogenous covariates features Intro4..........................................Endogenous sample-selection features Intro5.................................................Treatment assignment features Intro6.....................................Panel data and grouped data model features Intro7.........................................................Model interpretation Intro8...............................A Rosetta stone for extended regression commands Intro9.....................................Conceptual introduction via worked exampleeintreg..................................................Extended interval regression eintreg postestimation........................Postestimation tools for eintreg and xteintreg eintreg predict........................................predict after eintreg and xteintreg eoprobit............................................Extended ordered probit regression eoprobit postestimation.....................Postestimation tools for eoprobit and xteoprobit eoprobit predict.....................................predict after eoprobit and xteoprobit eprobit....................................................Extended probit regression eprobit postestimation........................Postestimation tools for eprobit and xteprobit eprobit predict........................................predict after eprobit and xteprobit eregress...................................................Extended linear regression eregress postestimation.....................Postestimation tools for eregress and xteregress eregress predict.....................................predict after eregress and xteregress ERM options........................................Extended regression model optionsestat teffects......................Average treatment effects for extended regression modelsExample1a.......................Linear regression with continuous endogenous covariate Example1b......................Interval regression with continuous endogenous covariate Example1c..............Interval regression with endogenous covariate and sample selection Example2a...........................Linear regression with binary endogenous covariate Example2b..................................Linear regression with exogenous treatment Example2c.................................Linear regression with endogenous treatment Example3a........................Probit regression with continuous endogenous covariate Example3b.....................Probit regression with endogenous covariate and treatment Example4a...........................Probit regression with endogenous sample selection Example4b...............Probit regression with endogenous treatment and sample selectionExample5............................Probit regression with endogenous ordinal treatmentExample6a..........................Ordered probit regression with endogenous treatment Example6b........Ordered probit regression with endogenous treatment and sample selection Example7.................Random-effects regression with continuous endogenous covariate Example8a.....................Random effects in one equation and endogenous covariateiii ContentsExample8b.........Random effects,endogenous covariate,and endogenous sample selection Example9..........Ordered probit regression with endogenous treatment and random effects predict advanced...........................................predict’s advanced features predict treatment.........................................predict for treatment statistics Triangularize.................................How to triangularize a system of equationsGlossary.........................................................................Subject and author index...........................................................Contents iii Stata,Stata Press,and Mata are registered trademarks of StataCorp LLC.Stata andStata Press are registered trademarks with the World Intellectual Property Organization®of the United Nations.Other brand and product names are registered trademarks ortrademarks of their respective companies.Copyright c 1985–2023StataCorp LLC,College Station,TX,USA.All rights reserved.。
ANSYS Workbench V14.0 实例精解

ANSYS Workbench V14.0实例入门通过一个简单的分析案例,对ANSYS Workbench 有一个初步的了解,在学习时无需了解操作步骤的每一项内容,了解ANSYS Workbench有限元分析的基本流程即可。
本例题可以采用V14.0求解,和V13.0结果相比,有一定的差异。
1案例介绍某如图1-24所示不锈钢钢板尺寸为320mmX50mmX20mm,其中一端为固定,另一端为自由状态,同时在一面上分布有均布载荷q=0.2MPa,请用ANSYS Workbench求解出应力与应变的分布云图。
2启动Workbench并建立分析项目(1)在Windows系统下执行“开始”→“所有程序”→ANSYS 14.0 →Workbench命令,启动ANSYS Workbench 14.0,进入主界面。
(2)双击主界面Toolbox(工具箱)中的Component systems→Symmetry(几何体)选项,即可在项目管理区创建分析项目A,如图1-25所示。
图1-24 案例问题图1-25 创建分析项目A(3)在工具箱中的Analysis System→Static Structural上按住鼠标左键拖曳到项目管理区中,当项目A 的Symmetry红色高亮显示时,放开鼠标创建项目B,此时相关联的项数据可共享,如图1-26所示。
图1-26 创建分析项目提示:本例是线性静态结构分析,创建项目时可直接创建项目B,而不创建项目A,几何体的导入可在项目B中的B3栏Geometry中导入创建。
本例的创建方法在对同一模型进行不同的分析时会经常用到。
3导入创建几何体(1)在A2栏的Geometry上点击鼠标右键,在弹出的快捷菜单中选择Import Geometry→Browse命令,如图1-27所示,此时会弹出“打开”对话框。
(2)在弹出的“打开”对话框中选择文件路径,导入char01-01几何体文件,如图1-28所示,此时A2栏Geometry后的变为,表示实体模型已经存在。
Native Instruments MASCHINE MIKRO MK3用户手册说明书

The information in this document is subject to change without notice and does not represent a commitment on the part of Native Instruments GmbH. The software described by this docu-ment is subject to a License Agreement and may not be copied to other media. No part of this publication may be copied, reproduced or otherwise transmitted or recorded, for any purpose, without prior written permission by Native Instruments GmbH, hereinafter referred to as Native Instruments.“Native Instruments”, “NI” and associated logos are (registered) trademarks of Native Instru-ments GmbH.ASIO, VST, HALion and Cubase are registered trademarks of Steinberg Media Technologies GmbH.All other product and company names are trademarks™ or registered® trademarks of their re-spective holders. Use of them does not imply any affiliation with or endorsement by them.Document authored by: David Gover and Nico Sidi.Software version: 2.8 (02/2019)Hardware version: MASCHINE MIKRO MK3Special thanks to the Beta Test Team, who were invaluable not just in tracking down bugs, but in making this a better product.NATIVE INSTRUMENTS GmbH Schlesische Str. 29-30D-10997 Berlin Germanywww.native-instruments.de NATIVE INSTRUMENTS North America, Inc. 6725 Sunset Boulevard5th FloorLos Angeles, CA 90028USANATIVE INSTRUMENTS K.K.YO Building 3FJingumae 6-7-15, Shibuya-ku, Tokyo 150-0001Japanwww.native-instruments.co.jp NATIVE INSTRUMENTS UK Limited 18 Phipp StreetLondon EC2A 4NUUKNATIVE INSTRUMENTS FRANCE SARL 113 Rue Saint-Maur75011 ParisFrance SHENZHEN NATIVE INSTRUMENTS COMPANY Limited 5F, Shenzhen Zimao Center111 Taizi Road, Nanshan District, Shenzhen, GuangdongChina© NATIVE INSTRUMENTS GmbH, 2019. All rights reserved.Table of Contents1Welcome to MASCHINE (23)1.1MASCHINE Documentation (24)1.2Document Conventions (25)1.3New Features in MASCHINE 2.8 (26)1.4New Features in MASCHINE 2.7.10 (28)1.5New Features in MASCHINE 2.7.8 (29)1.6New Features in MASCHINE 2.7.7 (29)1.7New Features in MASCHINE 2.7.4 (31)1.8New Features in MASCHINE 2.7.3 (33)2Quick Reference (35)2.1MASCHINE Project Overview (35)2.1.1Sound Content (35)2.1.2Arrangement (37)2.2MASCHINE Hardware Overview (40)2.2.1MASCHINE MIKRO Hardware Overview (40)2.2.1.1Browser Section (41)2.2.1.2Edit Section (42)2.2.1.3Performance Section (43)2.2.1.4Transport Section (45)2.2.1.5Pad Section (46)2.2.1.6Rear Panel (50)2.3MASCHINE Software Overview (51)2.3.1Header (52)2.3.2Browser (54)2.3.3Arranger (56)2.3.4Control Area (59)2.3.5Pattern Editor (60)3Basic Concepts (62)3.1Important Names and Concepts (62)3.2Adjusting the MASCHINE User Interface (65)3.2.1Adjusting the Size of the Interface (65)3.2.2Switching between Ideas View and Song View (66)3.2.3Showing/Hiding the Browser (67)3.2.4Showing/Hiding the Control Lane (67)3.3Common Operations (68)3.3.1Adjusting Volume, Swing, and Tempo (68)3.3.2Undo/Redo (71)3.3.3Focusing on a Group or a Sound (73)3.3.4Switching Between the Master, Group, and Sound Level (77)3.3.5Navigating Channel Properties, Plug-ins, and Parameter Pages in the Control Area.773.3.6Navigating the Software Using the Controller (82)3.3.7Using Two or More Hardware Controllers (82)3.3.8Loading a Recent Project from the Controller (84)3.4Native Kontrol Standard (85)3.5Stand-Alone and Plug-in Mode (86)3.5.1Differences between Stand-Alone and Plug-in Mode (86)3.5.2Switching Instances (88)3.6Preferences (88)3.6.1Preferences – General Page (89)3.6.2Preferences – Audio Page (93)3.6.3Preferences – MIDI Page (95)3.6.4Preferences – Default Page (97)3.6.5Preferences – Library Page (101)3.6.6Preferences – Plug-ins Page (109)3.6.7Preferences – Hardware Page (114)3.6.8Preferences – Colors Page (114)3.7Integrating MASCHINE into a MIDI Setup (117)3.7.1Connecting External MIDI Equipment (117)3.7.2Sync to External MIDI Clock (117)3.7.3Send MIDI Clock (118)3.7.4Using MIDI Mode (119)3.8Syncing MASCHINE using Ableton Link (120)3.8.1Connecting to a Network (121)3.8.2Joining and Leaving a Link Session (121)4Browser (123)4.1Browser Basics (123)4.1.1The MASCHINE Library (123)4.1.2Browsing the Library vs. Browsing Your Hard Disks (124)4.2Searching and Loading Files from the Library (125)4.2.1Overview of the Library Pane (125)4.2.2Selecting or Loading a Product and Selecting a Bank from the Browser (128)4.2.3Selecting a Product Category, a Product, a Bank, and a Sub-Bank (133)4.2.3.1Selecting a Product Category, a Product, a Bank, and a Sub-Bank on theController (137)4.2.4Selecting a File Type (137)4.2.5Choosing Between Factory and User Content (138)4.2.6Selecting Type and Character Tags (138)4.2.7Performing a Text Search (142)4.2.8Loading a File from the Result List (143)4.3Additional Browsing Tools (148)4.3.1Loading the Selected Files Automatically (148)4.3.2Auditioning Instrument Presets (149)4.3.3Auditioning Samples (150)4.3.4Loading Groups with Patterns (150)4.3.5Loading Groups with Routing (151)4.3.6Displaying File Information (151)4.4Using Favorites in the Browser (152)4.5Editing the Files’ Tags and Properties (155)4.5.1Attribute Editor Basics (155)4.5.2The Bank Page (157)4.5.3The Types and Characters Pages (157)4.5.4The Properties Page (160)4.6Loading and Importing Files from Your File System (161)4.6.1Overview of the FILES Pane (161)4.6.2Using Favorites (163)4.6.3Using the Location Bar (164)4.6.4Navigating to Recent Locations (165)4.6.5Using the Result List (166)4.6.6Importing Files to the MASCHINE Library (169)4.7Locating Missing Samples (171)4.8Using Quick Browse (173)5Managing Sounds, Groups, and Your Project (175)5.1Overview of the Sounds, Groups, and Master (175)5.1.1The Sound, Group, and Master Channels (176)5.1.2Similarities and Differences in Handling Sounds and Groups (177)5.1.3Selecting Multiple Sounds or Groups (178)5.2Managing Sounds (181)5.2.1Loading Sounds (183)5.2.2Pre-listening to Sounds (184)5.2.3Renaming Sound Slots (185)5.2.4Changing the Sound’s Color (186)5.2.5Saving Sounds (187)5.2.6Copying and Pasting Sounds (189)5.2.7Moving Sounds (192)5.2.8Resetting Sound Slots (193)5.3Managing Groups (194)5.3.1Creating Groups (196)5.3.2Loading Groups (197)5.3.3Renaming Groups (198)5.3.4Changing the Group’s Color (199)5.3.5Saving Groups (200)5.3.6Copying and Pasting Groups (202)5.3.7Reordering Groups (206)5.3.8Deleting Groups (207)5.4Exporting MASCHINE Objects and Audio (208)5.4.1Saving a Group with its Samples (208)5.4.2Saving a Project with its Samples (210)5.4.3Exporting Audio (212)5.5Importing Third-Party File Formats (218)5.5.1Loading REX Files into Sound Slots (218)5.5.2Importing MPC Programs to Groups (219)6Playing on the Controller (223)6.1Adjusting the Pads (223)6.1.1The Pad View in the Software (223)6.1.2Choosing a Pad Input Mode (225)6.1.3Adjusting the Base Key (226)6.2Adjusting the Key, Choke, and Link Parameters for Multiple Sounds (227)6.3Playing Tools (229)6.3.1Mute and Solo (229)6.3.2Choke All Notes (233)6.3.3Groove (233)6.3.4Level, Tempo, Tune, and Groove Shortcuts on Your Controller (235)6.3.5Tap Tempo (235)6.4Performance Features (236)6.4.1Overview of the Perform Features (236)6.4.2Selecting a Scale and Creating Chords (239)6.4.3Scale and Chord Parameters (240)6.4.4Creating Arpeggios and Repeated Notes (253)6.4.5Swing on Note Repeat / Arp Output (257)6.5Using Lock Snapshots (257)6.5.1Creating a Lock Snapshot (257)7Working with Plug-ins (259)7.1Plug-in Overview (259)7.1.1Plug-in Basics (259)7.1.2First Plug-in Slot of Sounds: Choosing the Sound’s Role (263)7.1.3Loading, Removing, and Replacing a Plug-in (264)7.1.4Adjusting the Plug-in Parameters (270)7.1.5Bypassing Plug-in Slots (270)7.1.6Using Side-Chain (272)7.1.7Moving Plug-ins (272)7.1.8Alternative: the Plug-in Strip (273)7.1.9Saving and Recalling Plug-in Presets (273)7.1.9.1Saving Plug-in Presets (274)7.1.9.2Recalling Plug-in Presets (275)7.1.9.3Removing a Default Plug-in Preset (276)7.2The Sampler Plug-in (277)7.2.1Page 1: Voice Settings / Engine (279)7.2.2Page 2: Pitch / Envelope (281)7.2.3Page 3: FX / Filter (283)7.2.4Page 4: Modulation (285)7.2.5Page 5: LFO (286)7.2.6Page 6: Velocity / Modwheel (288)7.3Using Native Instruments and External Plug-ins (289)7.3.1Opening/Closing Plug-in Windows (289)7.3.2Using the VST/AU Plug-in Parameters (292)7.3.3Setting Up Your Own Parameter Pages (293)7.3.4Using VST/AU Plug-in Presets (298)7.3.5Multiple-Output Plug-ins and Multitimbral Plug-ins (300)8Using the Audio Plug-in (302)8.1Loading a Loop into the Audio Plug-in (306)8.2Editing Audio in the Audio Plug-in (307)8.3Using Loop Mode (308)8.4Using Gate Mode (310)9Using the Drumsynths (312)9.1Drumsynths – General Handling (313)9.1.1Engines: Many Different Drums per Drumsynth (313)9.1.2Common Parameter Organization (313)9.1.3Shared Parameters (316)9.1.4Various Velocity Responses (316)9.1.5Pitch Range, Tuning, and MIDI Notes (316)9.2The Kicks (317)9.2.1Kick – Sub (319)9.2.2Kick – Tronic (321)9.2.3Kick – Dusty (324)9.2.4Kick – Grit (325)9.2.5Kick – Rasper (328)9.2.6Kick – Snappy (329)9.2.7Kick – Bold (331)9.2.8Kick – Maple (333)9.2.9Kick – Push (334)9.3The Snares (336)9.3.1Snare – Volt (338)9.3.2Snare – Bit (340)9.3.3Snare – Pow (342)9.3.4Snare – Sharp (343)9.3.5Snare – Airy (345)9.3.6Snare – Vintage (347)9.3.7Snare – Chrome (349)9.3.8Snare – Iron (351)9.3.9Snare – Clap (353)9.3.10Snare – Breaker (355)9.4The Hi-hats (357)9.4.1Hi-hat – Silver (358)9.4.2Hi-hat – Circuit (360)9.4.3Hi-hat – Memory (362)9.4.4Hi-hat – Hybrid (364)9.4.5Creating a Pattern with Closed and Open Hi-hats (366)9.5The Toms (367)9.5.1Tom – Tronic (369)9.5.2Tom – Fractal (371)9.5.3Tom – Floor (375)9.5.4Tom – High (377)9.6The Percussions (378)9.6.1Percussion – Fractal (380)9.6.2Percussion – Kettle (383)9.6.3Percussion – Shaker (385)9.7The Cymbals (389)9.7.1Cymbal – Crash (391)9.7.2Cymbal – Ride (393)10Using the Bass Synth (396)10.1Bass Synth – General Handling (397)10.1.1Parameter Organization (397)10.1.2Bass Synth Parameters (399)11Working with Patterns (401)11.1Pattern Basics (401)11.1.1Pattern Editor Overview (402)11.1.2Navigating the Event Area (404)11.1.3Following the Playback Position in the Pattern (406)11.1.4Jumping to Another Playback Position in the Pattern (407)11.1.5Group View and Keyboard View (408)11.1.6Adjusting the Arrange Grid and the Pattern Length (410)11.1.7Adjusting the Step Grid and the Nudge Grid (413)11.2Recording Patterns in Real Time (416)11.2.1Recording Your Patterns Live (417)11.2.2Using the Metronome (419)11.2.3Recording with Count-in (420)11.3Recording Patterns with the Step Sequencer (422)11.3.1Step Mode Basics (422)11.3.2Editing Events in Step Mode (424)11.4Editing Events (425)11.4.1Editing Events with the Mouse: an Overview (425)11.4.2Creating Events/Notes (428)11.4.3Selecting Events/Notes (429)11.4.4Editing Selected Events/Notes (431)11.4.5Deleting Events/Notes (434)11.4.6Cut, Copy, and Paste Events/Notes (436)11.4.7Quantizing Events/Notes (439)11.4.8Quantization While Playing (441)11.4.9Doubling a Pattern (442)11.4.10Adding Variation to Patterns (442)11.5Recording and Editing Modulation (443)11.5.1Which Parameters Are Modulatable? (444)11.5.2Recording Modulation (446)11.5.3Creating and Editing Modulation in the Control Lane (447)11.6Creating MIDI Tracks from Scratch in MASCHINE (452)11.7Managing Patterns (454)11.7.1The Pattern Manager and Pattern Mode (455)11.7.2Selecting Patterns and Pattern Banks (456)11.7.3Creating Patterns (459)11.7.4Deleting Patterns (460)11.7.5Creating and Deleting Pattern Banks (461)11.7.6Naming Patterns (463)11.7.7Changing the Pattern’s Color (465)11.7.8Duplicating, Copying, and Pasting Patterns (466)11.7.9Moving Patterns (469)11.8Importing/Exporting Audio and MIDI to/from Patterns (470)11.8.1Exporting Audio from Patterns (470)11.8.2Exporting MIDI from Patterns (472)11.8.3Importing MIDI to Patterns (474)12Audio Routing, Remote Control, and Macro Controls (483)12.1Audio Routing in MASCHINE (484)12.1.1Sending External Audio to Sounds (485)12.1.2Configuring the Main Output of Sounds and Groups (489)12.1.3Setting Up Auxiliary Outputs for Sounds and Groups (494)12.1.4Configuring the Master and Cue Outputs of MASCHINE (497)12.1.5Mono Audio Inputs (502)12.1.5.1Configuring External Inputs for Sounds in Mix View (503)12.2Using MIDI Control and Host Automation (506)12.2.1Triggering Sounds via MIDI Notes (507)12.2.2Triggering Scenes via MIDI (513)12.2.3Controlling Parameters via MIDI and Host Automation (514)12.2.4Selecting VST/AU Plug-in Presets via MIDI Program Change (522)12.2.5Sending MIDI from Sounds (523)12.3Creating Custom Sets of Parameters with the Macro Controls (527)12.3.1Macro Control Overview (527)12.3.2Assigning Macro Controls Using the Software (528)13Controlling Your Mix (535)13.1Mix View Basics (535)13.1.1Switching between Arrange View and Mix View (535)13.1.2Mix View Elements (536)13.2The Mixer (537)13.2.1Displaying Groups vs. Displaying Sounds (539)13.2.2Adjusting the Mixer Layout (541)13.2.3Selecting Channel Strips (542)13.2.4Managing Your Channels in the Mixer (543)13.2.5Adjusting Settings in the Channel Strips (545)13.2.6Using the Cue Bus (549)13.3The Plug-in Chain (551)13.4The Plug-in Strip (552)13.4.1The Plug-in Header (554)13.4.2Panels for Drumsynths and Internal Effects (556)13.4.3Panel for the Sampler (557)13.4.4Custom Panels for Native Instruments Plug-ins (560)13.4.5Undocking a Plug-in Panel (Native Instruments and External Plug-ins Only) (564)14Using Effects (567)14.1Applying Effects to a Sound, a Group or the Master (567)14.1.1Adding an Effect (567)14.1.2Other Operations on Effects (574)14.1.3Using the Side-Chain Input (575)14.2Applying Effects to External Audio (578)14.2.1Step 1: Configure MASCHINE Audio Inputs (578)14.2.2Step 2: Set up a Sound to Receive the External Input (579)14.2.3Step 3: Load an Effect to Process an Input (579)14.3Creating a Send Effect (580)14.3.1Step 1: Set Up a Sound or Group as Send Effect (581)14.3.2Step 2: Route Audio to the Send Effect (583)14.3.3 A Few Notes on Send Effects (583)14.4Creating Multi-Effects (584)15Effect Reference (587)15.1Dynamics (588)15.1.1Compressor (588)15.1.2Gate (591)15.1.3Transient Master (594)15.1.4Limiter (596)15.1.5Maximizer (600)15.2Filtering Effects (603)15.2.1EQ (603)15.2.2Filter (605)15.2.3Cabinet (609)15.3Modulation Effects (611)15.3.1Chorus (611)15.3.2Flanger (612)15.3.3FM (613)15.3.4Freq Shifter (615)15.3.5Phaser (616)15.4Spatial and Reverb Effects (617)15.4.1Ice (617)15.4.2Metaverb (619)15.4.3Reflex (620)15.4.4Reverb (Legacy) (621)15.4.5Reverb (623)15.4.5.1Reverb Room (623)15.4.5.2Reverb Hall (626)15.4.5.3Plate Reverb (629)15.5Delays (630)15.5.1Beat Delay (630)15.5.2Grain Delay (632)15.5.3Grain Stretch (634)15.5.4Resochord (636)15.6Distortion Effects (638)15.6.1Distortion (638)15.6.2Lofi (640)15.6.3Saturator (641)15.7Perform FX (645)15.7.1Filter (646)15.7.2Flanger (648)15.7.3Burst Echo (650)15.7.4Reso Echo (653)15.7.5Ring (656)15.7.6Stutter (658)15.7.7Tremolo (661)15.7.8Scratcher (664)16Working with the Arranger (667)16.1Arranger Basics (667)16.1.1Navigating Song View (670)16.1.2Following the Playback Position in Your Project (672)16.1.3Performing with Scenes and Sections using the Pads (673)16.2Using Ideas View (677)16.2.1Scene Overview (677)16.2.2Creating Scenes (679)16.2.3Assigning and Removing Patterns (679)16.2.4Selecting Scenes (682)16.2.5Deleting Scenes (684)16.2.6Creating and Deleting Scene Banks (685)16.2.7Clearing Scenes (685)16.2.8Duplicating Scenes (685)16.2.9Reordering Scenes (687)16.2.10Making Scenes Unique (688)16.2.11Appending Scenes to Arrangement (689)16.2.12Naming Scenes (689)16.2.13Changing the Color of a Scene (690)16.3Using Song View (692)16.3.1Section Management Overview (692)16.3.2Creating Sections (694)16.3.3Assigning a Scene to a Section (695)16.3.4Selecting Sections and Section Banks (696)16.3.5Reorganizing Sections (700)16.3.6Adjusting the Length of a Section (702)16.3.6.1Adjusting the Length of a Section Using the Software (703)16.3.6.2Adjusting the Length of a Section Using the Controller (705)16.3.7Clearing a Pattern in Song View (705)16.3.8Duplicating Sections (705)16.3.8.1Making Sections Unique (707)16.3.9Removing Sections (707)16.3.10Renaming Scenes (708)16.3.11Clearing Sections (710)16.3.12Creating and Deleting Section Banks (710)16.3.13Working with Patterns in Song view (710)16.3.13.1Creating a Pattern in Song View (711)16.3.13.2Selecting a Pattern in Song View (711)16.3.13.3Clearing a Pattern in Song View (711)16.3.13.4Renaming a Pattern in Song View (711)16.3.13.5Coloring a Pattern in Song View (712)16.3.13.6Removing a Pattern in Song View (712)16.3.13.7Duplicating a Pattern in Song View (712)16.3.14Enabling Auto Length (713)16.3.15Looping (714)16.3.15.1Setting the Loop Range in the Software (714)16.3.15.2Activating or Deactivating a Loop Using the Controller (715)16.4Playing with Sections (715)16.4.1Jumping to another Playback Position in Your Project (716)16.5Triggering Sections or Scenes via MIDI (717)16.6The Arrange Grid (719)16.7Quick Grid (720)17Sampling and Sample Mapping (722)17.1Opening the Sample Editor (722)17.2Recording Audio (724)17.2.1Opening the Record Page (724)17.2.2Selecting the Source and the Recording Mode (725)17.2.3Arming, Starting, and Stopping the Recording (729)17.2.5Checking Your Recordings (731)17.2.6Location and Name of Your Recorded Samples (734)17.3Editing a Sample (735)17.3.1Using the Edit Page (735)17.3.2Audio Editing Functions (739)17.4Slicing a Sample (743)17.4.1Opening the Slice Page (743)17.4.2Adjusting the Slicing Settings (744)17.4.3Manually Adjusting Your Slices (746)17.4.4Applying the Slicing (750)17.5Mapping Samples to Zones (754)17.5.1Opening the Zone Page (754)17.5.2Zone Page Overview (755)17.5.3Selecting and Managing Zones in the Zone List (756)17.5.4Selecting and Editing Zones in the Map View (761)17.5.5Editing Zones in the Sample View (765)17.5.6Adjusting the Zone Settings (767)17.5.7Adding Samples to the Sample Map (770)18Appendix: Tips for Playing Live (772)18.1Preparations (772)18.1.1Focus on the Hardware (772)18.1.2Customize the Pads of the Hardware (772)18.1.3Check Your CPU Power Before Playing (772)18.1.4Name and Color Your Groups, Patterns, Sounds and Scenes (773)18.1.5Consider Using a Limiter on Your Master (773)18.1.6Hook Up Your Other Gear and Sync It with MIDI Clock (773)18.1.7Improvise (773)18.2Basic Techniques (773)18.2.1Use Mute and Solo (773)18.2.2Create Variations of Your Drum Patterns in the Step Sequencer (774)18.2.3Use Note Repeat (774)18.2.4Set Up Your Own Multi-effect Groups and Automate Them (774)18.3Special Tricks (774)18.3.1Changing Pattern Length for Variation (774)18.3.2Using Loops to Cycle Through Samples (775)18.3.3Load Long Audio Files and Play with the Start Point (775)19Troubleshooting (776)19.1Knowledge Base (776)19.2Technical Support (776)19.3Registration Support (777)19.4User Forum (777)20Glossary (778)Index (786)1Welcome to MASCHINEThank you for buying MASCHINE!MASCHINE is a groove production studio that implements the familiar working style of classi-cal groove boxes along with the advantages of a computer based system. MASCHINE is ideal for making music live, as well as in the studio. It’s the hands-on aspect of a dedicated instru-ment, the MASCHINE hardware controller, united with the advanced editing features of the MASCHINE software.Creating beats is often not very intuitive with a computer, but using the MASCHINE hardware controller to do it makes it easy and fun. You can tap in freely with the pads or use Note Re-peat to jam along. Alternatively, build your beats using the step sequencer just as in classic drum machines.Patterns can be intuitively combined and rearranged on the fly to form larger ideas. You can try out several different versions of a song without ever having to stop the music.Since you can integrate it into any sequencer that supports VST, AU, or AAX plug-ins, you can reap the benefits in almost any software setup, or use it as a stand-alone application. You can sample your own material, slice loops and rearrange them easily.However, MASCHINE is a lot more than an ordinary groovebox or sampler: it comes with an inspiring 7-gigabyte library, and a sophisticated, yet easy to use tag-based Browser to give you instant access to the sounds you are looking for.What’s more, MASCHINE provides lots of options for manipulating your sounds via internal ef-fects and other sound-shaping possibilities. You can also control external MIDI hardware and 3rd-party software with the MASCHINE hardware controller, while customizing the functions of the pads, knobs and buttons according to your needs utilizing the included Controller Editor application. We hope you enjoy this fantastic instrument as much as we do. Now let’s get go-ing!—The MASCHINE team at Native Instruments.MASCHINE Documentation1.1MASCHINE DocumentationNative Instruments provide many information sources regarding MASCHINE. The main docu-ments should be read in the following sequence:1.MASCHINE MIKRO Quick Start Guide: This animated online guide provides a practical ap-proach to help you learn the basic of MASCHINE MIKRO. The guide is available from theNative Instruments website: https:///maschine-mikro-quick-start/2.MASCHINE Manual (this document): The MASCHINE Manual provides you with a compre-hensive description of all MASCHINE software and hardware features.Additional documentation sources provide you with details on more specific topics:►Online Support Videos: You can find a number of support videos on The Official Native In-struments Support Channel under the following URL: https:///NIsupport-EN. We recommend that you follow along with these instructions while the respective ap-plication is running on your computer.Other Online Resources:If you are experiencing problems related to your Native Instruments product that the supplied documentation does not cover, there are several ways of getting help:▪Knowledge Base▪User Forum▪Technical Support▪Registration SupportYou will find more information on these subjects in the chapter Troubleshooting.Document Conventions1.2Document ConventionsThis section introduces you to the signage and text highlighting used in this manual. This man-ual uses particular formatting to point out special facts and to warn you of potential issues.The icons introducing these notes let you see what kind of information is to be expected:This document uses particular formatting to point out special facts and to warn you of poten-tial issues. The icons introducing the following notes let you see what kind of information canbe expected:Furthermore, the following formatting is used:▪Text appearing in (drop-down) menus (such as Open…, Save as… etc.) in the software andpaths to locations on your hard disk or other storage devices is printed in italics.▪Text appearing elsewhere (labels of buttons, controls, text next to checkboxes etc.) in thesoftware is printed in blue. Whenever you see this formatting applied, you will find thesame text appearing somewhere on the screen.▪Text appearing on the displays of the controller is printed in light grey. Whenever you seethis formatting applied, you will find the same text on a controller display.▪Text appearing on labels of the hardware controller is printed in orange. Whenever you seethis formatting applied, you will find the same text on the controller.▪Important names and concepts are printed in bold.▪References to keys on your computer’s keyboard you’ll find put in square brackets (e.g.,“Press [Shift] + [Enter]”).►Single instructions are introduced by this play button type arrow.→Results of actions are introduced by this smaller arrow.Naming ConventionThroughout the documentation we will refer to MASCHINE controller (or just controller) as the hardware controller and MASCHINE software as the software installed on your computer.The term “effect” will sometimes be abbreviated as “FX” when referring to elements in the MA-SCHINE software and hardware. These terms have the same meaning.Button Combinations and Shortcuts on Your ControllerMost instructions will use the “+” sign to indicate buttons (or buttons and pads) that must be pressed simultaneously, starting with the button indicated first. E.g., an instruction such as:“Press SHIFT + PLAY”means:1.Press and hold SHIFT.2.While holding SHIFT, press PLAY and release it.3.Release SHIFT.1.3New Features in MASCHINE2.8The following new features have been added to MASCHINE: Integration▪Browse on , create your own collections of loops and one-shots and send them directly to the MASCHINE browser.Improvements to the Browser▪Samples are now cataloged in separate Loops and One-shots tabs in the Browser.▪Previews of loops selected in the Browser will be played in sync with the current project.When a loop is selected with Prehear turned on, it will begin playing immediately in-sync with the project if transport is running. If a loop preview starts part-way through the loop, the loop will play once more for its full length to ensure you get to hear the entire loop once in context with your project.▪Filters and product selections will be remembered when switching between content types and Factory/User Libraries in the Browser.▪Browser content synchronization between multiple running instances. When running multi-ple instances of MASCHINE, either as Standalone and/or as a plug-in, updates to the Li-brary will be synced across the instances. For example, if you delete a sample from your User Library in one instance, the sample will no longer be present in the other instances.Similarly, if you save a preset in one instance, that preset will then be available in the oth-er instances, too.▪Edits made to samples in the Factory Libraries will be saved to the Standard User Directo-ry.For more information on these new features, refer to the following chapter ↑4, Browser. Improvements to the MASCHINE MIKRO MK3 Controller▪You can now set sample Start and End points using the controller. For more information refer to ↑17.3.1, Using the Edit Page.Improved Support for A-Series Keyboards▪When Browsing with A-Series keyboards, you can now jump quickly to the results list by holding SHIFT and pushing right on the 4D Encoder.▪When Browsing with A-Series keyboards, you can fast scroll through the Browser results list by holding SHIFT and twisting the 4D Encoder.▪Mute and Solo Sounds and Groups from A-Series keyboards. Sounds are muted in TRACK mode while Groups are muted in IDEAS.。
使用 MCAL4.3 中的 CSE (加密服务引擎) 模块 - NXP Semiconductors

Using the CSE (Cryptographic Services Engine) Module in MCAL4.3by: NXP Semiconductors1 IntroductionToday, people are concerned about sharing/transmittinginformation in a secure and trusted manner betweenparties in the automotive area. The security functionsimplemented with Cryptographic Services Engine(CSE)module are described in the Secure HardwareExtension(SHE) functional specification.This application note provides an introduction to theCSE module on the MPC5777C and explains how toconfigure and use this module in MCAL4.3. Afterreading this application note, you should be able to:• Understand the CSE configuration process inMCAL4.3• Understand how CSE module working on theMPC5777CThe application note also provides examples for specificconfigurations. The examples are provided in thesoftware package accompanying this document and isalso explained in detail. To aid in understanding of thisdocument and software package, you need to downloadthe MPC5777C reference manual from the NXPwebsite. The following table shows the abbreviationsused throughout the document.NXP SemiconductorsDocument Number: AN 13061 Application Notes Rev. 0 , 12/2020 Contents 1 Introduction ............................................................................ 1 3 CSE module on MPC5777C device ....................................... 2 3.1 Chip-specific CSE information ............................... 2 3.2 Main features .......................................................... 2 3.3 Modes of operation ................................................. 3 3.4 Block diagram ......................................................... 3 4 AES-128 encryption and decryption overview ....................... 5 4.1 Electronic Codebook (ECB) ................................... 5 4.2 Chiper-block chaining (CBC) ................................. 5 4.3 CMAC (Cipherbased Message Authentication Code) 6 5 CRYPTO module in MCAL4.3 ......................................... 7 6 CRYPTO loading key and processing primitive .............. 11 7 References . (12)2 CSE module on MPC5777CTable 1. Abbreviations and acronyms2 CSE module on MPC5777CThe Cryptographic Services Engine (CSE) is a peripheral module that implements the security functions described in the Secure Hardware Extension (SHE) Functional Specification Version 1.1.The CSE design includes a host interface with a set of memory mapped registers and a system bus interface. The host interface are used by the CPU to issue commands. The system bus interface allows the CSE to access system memory directly. Two dedicated blocks of system flash memory are used by the CSE for secure key storage.2.1 Chip-specific CSE informationThis chip has one instance of the CSE module. The module:•Executes the chip's secure boot process. See the System Boot details in the MPC5777C Reference Manual.•Exclusive access to the flash memory blocks mapped to the C55FMC_LOCK1 register, PASS_LOCK1_PGn registers, and TDRn_LOCK1 DCF client. See C55FMC_LOCK1 register bit mapping. The system MPU is automatically configured to prevent other bus masters frominterfering with CSE's access to the flash memory.2.2 FeaturesThe CSE has the following features:•Secure storage for cryptographic keys•AES-128 encryption and decryption•AES-128 CMAC authentication•True random number generation•Secure boot mode•System bus master interface2.3 Modes of operationThe CSE supports operation in Normal and Debug modes of operation. The use of the cryptographic keys stored by the CSE is controlled based on the activation of the CPU debug port and the successful completion of the secure boot process.The CSE has a low-power mode that disables the clock to all logic except the host interface. Register accesses are supported in this mode, but commands are not processed.2.4 Block diagramThe CSE design includes a command processor, host interface, system bus interface, local memory, AES logic, and True Random Number Generator (TRNG) as shown below.A host interface (via the peripheral bridge) with a set of memory mapped registers that are used by the CPU to issue commands. Furthermore, a system bus interface (via the crossbar interface) allows the CSE to directly access system memory. Here the crypto module behaves like any other master on the Crossbar switch (XBAR). Through the host interface, you can configure and control the CSE module, like putting the module into low power mode, enabling interrupts for finished command processing, or suspending command processing. A status and error register gives further system information. For a complete list of CSE commands see MPC5777C reference manual.Two dedicated blocks of system flash memory are used by the CSE for secure key and firmware storage. These blocks are not accessible by other masters from the system. Therefore, they are called secure flash. The command processing is done by a 32-bit CSE core with attached ROM and RAM running at system frequency. After system boot, the core comes out of reset and executes boot code from the module ROM. This code will load the firmware from the secure flash into the module RAM and start executing from there. This reduces the flash accesses by the crypto core on the Crossbar. The AES block is a slave to the crypto internal bus. It processes the encryption (plaintext → ciphertext) and decryption (ciphertext → plaintext) and offers AES CMAC authentication. This application note deals only with the authentication capabilities of the CSE.2 CSE module on MPC5777CFigure 1. CSE block diagram on MPC5777C3 AES-128 encryption and decryption overviewBlock ciphers like the AES algorithm, working with a defined granularity, are often 64 bits or 128 bits. The simplest way to encode data is to split the message in the cipher specific granularity. In this case, the cipher output depends only on the key and input value. The drawback of this cipher mode, which is called Electronic Code Book (ECB), is that the same input values will be decoded into the same output values. This gives attackers the opportunity to use statistical analysis (for example, in a normal text some letter combinations occur much more often than others).To overcome this issue other cipher modes were developed like the Cipher-block chaining (CBC), Cipher feedback (CFB), Output feedback (OFB) and Counter (CTR) mode.The CSE module supports only the ECB and the CBC mode which are described in the following sections.3.1 Electronic Codebook (ECB)Each block has no relationship with another block of the same message or information. The following figure shows the block diagram of the ECB mode.Figure 2. ECB block diagramThe following figure shows the drawback of the ECB mode. Taking the Freescale logo as an example it is still visible in the encoded form using this mode. It is obvious that this is not very secure.Figure 3. Encoding using ECB mode3.2 Cipher-block chaining (CBC)The Cipher-block (CBC) mode, invented in 1976, is one of the most important cipher modes. In this mode the output of the last encoding step is xor’ed with the input block of the actual encoding step. Because of this, an additional value for the first encoding step is necessary which is called initialization vector (IV). Using this method each cipher block depends on the plaintext blocks processed up to that point.3 AES-128 encryption and decryption overviewThe following figure shows the block diagram of the CBC mode.Figure 4. CBC block diagramThe following figure shows the encoding result of the Freescale logo using the CBC cipher mode. The difference from the ECB mode is self-evident. In many applications ECB mode may not be appropriate.Figure 5. Encoding using CBC mode3.3 CMAC (Cipher-based Message Authentication Code)A CMAC provides a method for authenticating messages and data. The CMAC algorithm accepts as input a secret key and an arbitrary-length message to be authenticated, and outputs a CMAC. The CMAC value protects both a message's data integrity as well as its authenticity, by allowing verifiers (who also possess the secret key) to detect any change in the message contentFigure 6. CMAC SchemeIf you want more information about CSE functional description and CSE commands, see MPC5777C reference manual.CRYPTO module in MCAL4.34 CRYPTO module in MCAL4.3The following figure shows the location of Crypto Driver module in the micro controller abstraction layer. It is below the Crypto Interface module and Crypto Service Manager module. It implements a generic interface for synchronous and asynchronous cryptographic primitives. It also supports key storage, key configuration, and key management for cryptographic services.To provide cryptographic functionalities an ECU needs to integrate one unique Crypto Service Manager module and one Crypto Interface. However, the Crypto interface can access several Crypto Drivers, each of them is configured according to the underlying Crypto Driver Object.Figure 7. AUTOSAR layered view with crypto moduleA Crypto Driver Object represents an instance of independent crypto hardware “device” (e.g. AES accelerator). There could be a channel for fast AES and CMAC calculations on a HSM for jobs with high priority, which ends on a native AES calculation service in the Crypto Driver. But it is also possible that a Crypto Driver Object is a piece of software, e.g. for RSA calculations where jobs are able to encrypt, decrypt, sign or verify. The Crypto Driver Object is the endpoint of a crypto channel.NOTECrypto have layers including Crypto Cryif and CSM, since CSM is alwaysa stub and only in order to avoid compiler error. Thejob_configuration_structure is responsible by CSM, so the job structurecannot generated by NXP CSM itself, as CSM is a stub in MCALperspective. Developers need to manually update the structure and passingit to Crypto_Process_Job. So if need more CSM package support andshould contact the third party(i.e vector DaVinci).CRYPTO module in MCAL4.3Figure 8 shows the relationship between different configuration items in EB:Cryptoprimitives ->CryptoDriverObject->CryIfChannel->CsmQueue->CsmJobs CryptokeyElement->CryptokeyType->Cryptokey->CryIfKey->CsmKeysCrypto Driver Object: A Crypto Driver implements one or more Crypto Driver Objects. The Crypto Driver Object can offer different crypto primitives in hardware or software. The Crypto Driver Objects of one Crypto Driver are independent of each other. There is only one workspace for each Crypto Driver Object (i.e. only one crypto primitive can be performed at the same time)CryptoKeyElement: Key elements are used to store data. This data can be key material or the IV needed for AES encryption. It can also be used to configure the behavior of the key management functions.CryptoKeyType: A key type consists of references to key elements. The key types are typically pre-configured by the vendor of the Crypto Driver.CryptoKey: A Key can be referenced by a job in the CSM. In the Crypto Driver, the key references a specific key type.CryptoPrimitive: A crypto primitive is an instance of a configured cryptographic algorithm realized in a Crypto Driver Object.Figure 8. Crypto configuration in EBCRYPTO module in MCAL4.3 CryIf: The crypto drivers are called by CryIf, the Crypto drivers access the underlying hardware and software objects to calculate results with their cryptographic primitives. The results are forwarded to CryIf.CsmJob: A job is an instance of a job’s configured in cryptographic primitive. An operation of a crypto primitive declares what part of the crypto primitive will be performed. There are three different operation modes:•START is a operation mode indicates a new request of a crypto primitive and will be cancel all previous request of the same job and preemptive•UPDATE mode indicates that the crypto primitive expects input data•FINISH mode indicates that after this part all data are fed completely and the crypto primitive can finalize the calculationThe priority of a job defines the importance of it. The higher the priority means more immediately the job is executed. The priority of a cryptographic job is part of the configuration.Figure 9. Cryif and CsmJobs in EBNOTEThe crypro driver does not have callback function in CryIf.c file, so itshould add SampleAppCrypto(job, result) intoCryIf_CallbackNotification(const Crypto_JobType* job, Std_ReturnTyperesult) function in CryIf.c file.CRYPTO module in MCAL4.3As show in the following figure, this sample configure three primitives, ENCRYPT, RNG(random number generated) and DECRYPT.Figure 10. CryptoPrimitive configuration in EBAs show in the following figure, A CryptoKeyElement having the CryptoKeyElementId set to 1 represents a key material and cannot be set be using the field CryptoKeyElementInitValue. All the other CryptoKeyElementIds can be set either using CryptoKeyElementSet function or the Tresos field CryptoKeyElementInitValue.Figure 11. CryptoKeyEelment configuration in EBAs show in the following figure, key elements and keys have to be configured for all primitives supported in this release. Containers CryptoKeyElements, CryptoKeyTypes and CryptoKeys should be activated or deactivated in Tresos in the same time. For a key it is mandatory to have a key type and configured key elements. The index of the different key elements from the different Crypto services are defined as in imported types table SWS_Csm_01022(in AUOTOSAR document Specification of Crypto Service Manager)A key has a state which is either 'valid' or 'invalid'. By default, all the keys are 'invalid' and have to be set to valid by using the function Crypto_KeySetValid. If a key is in the invalid state then the Crypto services which make use of the key returns CRYPTO_E_KEY_NOT_VALID value.Figure 12. CryptoKey configuration in EBCRYPTO loading key and processing primitive Because crypto driver not include CSM layer, so the Crypto_JobType structure should be initialized manually in the code.Figure 13. Csm in EB5 CRYPTO loading key and processing primitiveTo process a primitive (random number generation, MAC generation or verification, AESencrypt/decrypt), the following sequence should be followed:1.If keys are needed, the containers CryptoKeyElements, CryptoKeyTypes, CryptoKeys should beenabled2.Crypto_KeyElementSet(65536, CryptoKeyElementId_0, aes_test01_key, 16) meaning a keymaterial corresponding to key 65536 and having the size 16 bytes is configured3.Call the API function Crypto_KeySetValid(65536) to enable key 655364.Call the API function Crypto_ProcessJob() to process job, it process three jobs(randomgenerated, encryption and decryption) in this sample codeFigure 14. Process job in sample code6 ReferencesCall API function StringCompare ((uint8_t*)ucPlainText, ucDecText, 16) to verify the encryption and decryption functionality.Figure 15. Compare the ucPlainText and ucDecText6 References•MPC5777C Reference Manual (Document ID: MPC5777CPRM)•Specification of Crypto Service Manager(Document link)•Specification of Crypto Driver(Document link)•AUTOSAR_MCAL_CRYPTO_IM•AUTOSAR_MCAL_CRYPTO_UMDocument Number: AN 13061 Rev. 0 12/2020 How to Reach Us: Home Page: Web Support: /supportInformation in this document is provided solely to enable system and software implementers to use NXP products. There are no express or implied copyright licenses granted hereunder to design or fabricate any integrated circuits based on the information in this document. NXP reserves the right to make changes without further notice to any products herein. NXP makes no warranty, representation, or guarantee regarding the suitability of its products for any particular purpose, nor does NXP assume any liability arising out of the application or use of any product or circuit, and specifically disclaims any and all liability, including without limitation consequential or incidental damages. “Typical ” parameters that may be provided in NXP data sheets and/or specifications can and do vary in different applications, and actual performance may vary over time. All operating parameters, including “typicals,” must be validated for each customer application by customer's technical experts. NXP does not convey any license under its patent rights nor the rights of others. NXP sells products pursuant to standard terms and conditions of sale, which can be found at the following address:/SalesTermsandConditions . While NXP has implemented advanced security features, all products may be subject to unidentified vulnerabilities. Customers are responsible for the design and operation of their applications and products to reduce the effect of these vulnerabilities on customer’s applications and products, and NXP accepts no li ability for any vulnerability that is discovered. Customers should implement appropriate design and operating safeguards to minimize the risks associated with their applications and products. NXP, the NXP logo, NXP SECURE CONNECTIONS FOR A SMARTER WORLD, COOLFLUX, EMBRACE, GREENCHIP, HITAG, I2C BUS, ICODE, JCOP, LIFE VIBES, MIFARE, MIFARE CLASSIC, MIFARE DESFire, MIFARE PLUS, MIFARE FLEX, MANTIS, MIFARE ULTRALIGHT, MIFARE4MOBILE, MIGLO, NTAG, ROADLINK, SMARTLX, SMARTMX, STARPLUG, TOPFET, TRENCHMOS, UCODE, Freescale, the Freescale logo, AltiVec, C 5, CodeTEST, CodeWarrior, ColdFire, ColdFire+, C Ware, the Energy Efficient Solutions logo, Kinetis, Layerscape, MagniV, mobileGT, PEG, PowerQUICC, Processor Expert, QorIQ, QorIQ Qonverge, Ready Play, SafeAssure, the SafeAssure logo, StarCore, Symphony, VortiQa, Vybrid, Airfast, BeeKit, BeeStack, CoreNet, Flexis, MXC, Platform in a Package, QUICC Engine, SMARTMOS, Tower, TurboLink, and UMEMS are trademarks of NXP B.V. All other product or service names are the property of their respective owners. Arm, AMBA, Arm Powered, Artisan, Cortex, Jazelle, Keil, SecurCore, Thumb, TrustZone, and μVision are registered trademarks of Arm Limited (or its subsidiaries) in the EU and/or elsewhere. Arm7, Arm9, Arm11, big.LITTLE, CoreLink, CoreSight, DesignStart, Mali, Mbed, NEON, POP, Sensinode, Socrates, ULINK and Versatile are trademarks of Arm Limited (or its subsidiaries) in the EU and/or elsewhere. All rights reserved. Oracle and Java are registered trademarks of Oracle and/or its affiliates. The Power Architecture and word marks and the Power and logos and related marks are trademarks and service marks licensed by . © 2020 NXP B.V.。
KSZ9021RN to KSZ9031RNX Migration Guide
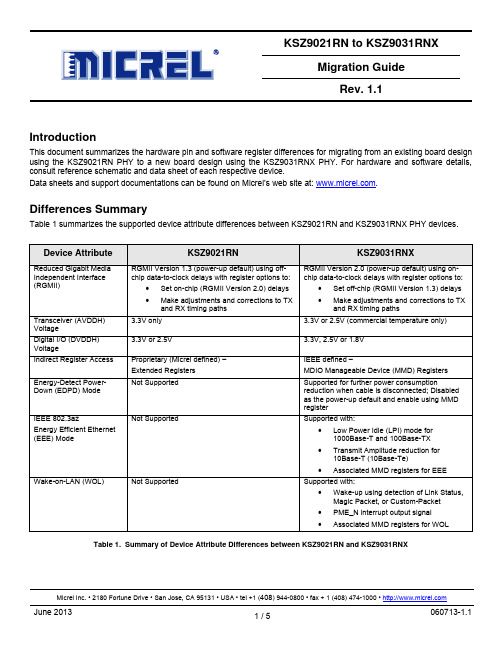
KSZ9021RN to KSZ9031RNXMigration GuideRev. 1.1IntroductionThis document summarizes the hardware pin and software register differences for migrating from an existing board design using the KSZ9021RN PHY to a new board design using the KSZ9031RNX PHY. For hardware and software details, consult reference schematic and data sheet of each respective device.Data sheets and support documentations can be found on Micrel’s web site at: .Differences SummaryTable 1 summarizes the supported device attribute differences between KSZ9021RN and KSZ9031RNX PHY devices.Device Attribute KSZ9021RN KSZ9031RNXReduced Gigabit Media Independent Interface (RGMII) RGMII Version 1.3 (power-up default) using off-chip data-to-clock delays with register options to:•Set on-chip (RGMII Version 2.0) delays•Make adjustments and corrections to TXand RX timing pathsRGMII Version 2.0 (power-up default) using on-chip data-to-clock delays with register options to:•Set off-chip (RGMII Version 1.3) delays•Make adjustments and corrections to TXand RX timing pathsTransceiver (AVDDH)Voltage3.3V only 3.3V or 2.5V (commercial temperature only)Digital I/O (DVDDH)Voltage3.3V or 2.5V 3.3V, 2.5V or 1.8VIndirect Register Access Proprietary (Micrel defined) –Extended Registers IEEE defined –MDIO Manageable Device (MMD) RegistersEnergy-Detect Power-Down (EDPD) Mode Not Supported Supported for further power consumptionreduction when cable is disconnected; Disabledas the power-up default and enable using MMDregisterIEEE 802.3azEnergy Efficient Ethernet (EEE) Mode Not Supported Supported with:•Low Power Idle (LPI) mode for1000Base-T and 100Base-TX•Transmit Amplitude reduction for10Base-T (10Base-Te)•Associated MMD registers for EEEWake-on-LAN (WOL) Not Supported Supported with:•Wake-up using detection of Link Status,Magic Packet, or Custom-Packet•PME_N interrupt output signal•Associated MMD registers for WOL Table 1. Summary of Device Attribute Differences between KSZ9021RN and KSZ9031RNXPin DifferencesTable 2 summarizes the pin differences between KSZ9021RN and KSZ9031RNX PHY devices. Pin #KSZ9021RNKSZ9031RNXPin NameType Pin FunctionPin NameTypePin Function1 AVDDH P 3.3V analog V DD AVDDH P 3.3V/2.5V (commercial temp only) analog V DD 12 AVDDH P 3.3V analog V DD AVDDH P 3.3V/2.5V (commercial temp only) analog V DD 13VSS_PSGndDigital groundNC–No connectThis pin is not bonded and can be connected to digital ground for footprint compatibility with the Micrel KSZ9021RN Gigabit PHY.16 DVDDH P3.3V / 2.5V digital V DD DVDDH P 3.3V, 2.5V, or 1.8V digital V DD_I/O 17 LED1 /PHYAD0I/OLED Output:Programmable LED1 OutputConfig Mode:The pull-up/pull-down value is latched as PHYAD[0] during power-up / reset.LED1 /PHYAD0 /PME_N1I/O LED1 output:Programmable LED1 outputConfig mode:The voltage on this pin issampled and latched during the power-up/reset process to determine the value of PHYAD[0].PME_N output:Programmable PME_N output (pin option 1). This pin function requires an external pull-up resistor to DVDDH (digital V DD_I/O ) in a range from 1.0k Ω to 4.7k Ω. When asserted low, this pin signals that a WOL event has occurred.When WOL is not enabled, this pin function behaves as per the KSZ9021RN pin definition.This pin is not an open-drain for all operating modes.34 DVDDH P3.3V / 2.5V digital V DD DVDDH P 3.3V, 2.5V, or 1.8V digital V DD_I/O38 INT_N O Interrupt OutputThis pin provides aprogrammable interrupt output and requires an external pull-up resistor to DVDDH in the range of 1K to 4.7K ohms for active low assertion.INT_N/O Interrupt OutputThis pin provides aprogrammable interrupt output and requires an external pull-up resistor to DVDDH in the range of 1K to 4.7K ohms for active low assertion.This pin is an open-drain.PME_N2 PME_N output: Programmable PME_N output (pin option 2). When asserted low, this pin signals that a WOL event has occurred.When WOL is not enabled, this pin function behaves as per the KSZ9021RN pin definition. This pin is not an open-drain for all operating modes.40 DVDDH P 3.3V / 2.5V digital V DD DVDDHP3.3V, 2.5V, or 1.8V digitalV DD_I/O47 AVDDH P 3.3V analog V DD NC–NoconnectThis pin is not bonded and canbe connected to AVDDH powerfor footprint compatibility withthe Micrel KSZ9021RN GigabitPHY.48 ISET I/O Set transmit output levelConnect a 4.99KΩ 1%resistor to ground on thispin. ISET I/O Set the transmit output levelConnect a 12.1kΩ 1% resistorto ground on this pin.Table 2. Pin Differences between KSZ9021RN and KSZ9031RNXStrapping Option DifferencesThere is no strapping pin difference between KSZ9021RN and KSZ9031RNX.Register Map DifferencesThe register space within the KSZ9021RN and KSZ9031RNX consists of direct-access registers and indirect-access registers.Direct-access RegistersThe direct-access registers comprise of IEEE-Defined Registers (0h – Fh) and Vendor-Specific Registers (10h – 1Fh). Between the KSZ9021RN and KSZ9031RNX, the direct-access registers and their bits have the same definitions, except for the following registers in Table 3.Direct-access RegisterKSZ9021RN KSZ9031RNXName Description Name Description3h PHYIdentifier2 Bits [15:10] (part of OUI) – same asKSZ9031RNXBits [9:4] (model number) – unique forKSZ9021RNBits [3:0] (revision number) – uniquedepending on chip revision PHY Identifier 2 Bits [15:10] (part of OUI) – same asKSZ9021RNBits [9:4] (model number) – unique forKSZ9031RNXBits [3:0] (revision number) – uniquedepending on chip revisionBh ExtendedRegister –Control Indirect Register AccessSelect read/write control andpage/address of Extended RegisterReserved ReservedDo not change the default value ofthis registerCh ExtendedRegister –Data Write Indirect Register AccessValue to write to Extended RegisterAddressReserved ReservedDo not change the default value ofthis registerDh ExtendedRegister –Data Read Indirect Register AccessValue read from Extended RegisterAddressMMD Access –ControlIndirect Register AccessSelect read/write control and MMDdevice addressEh Reserved ReservedDo not change the default value ofthis register MMD Access –Register/DataIndirect Register AccessValue of register address/data for theselected MMD device address1Fh, bit [1] Software Reset 1 = Reset chip, except all registers0 = Disable resetReserved ReservedTable 3. Direct-access Register Differences between KSZ9021RN and KSZ9031RNXIndirect-access RegistersThe indirect register mapping and read/write access are completely different for the KSZ9021RN (uses Extended Registers) and KSZ9031RNX (uses MMD Registers). Refer to respective devices’ data sheets for details.Indirect registers provide access to the following commonly used functions:•1000Base-T link-up time control (KSZ9031RNX only)• Pin strapping status• Pin strapping override•Skew adjustments for RGMII clocks, control signals, and datao Resolution of skew steps are different between KSZ9021RN and KSZ9031RNX•Energy-Detect Power-Down Mode enable/disable (KSZ9031RNX only)•Energy Efficient Ethernet function (KSZ9031RNX only)•Wake-on-LAN function (KSZ9031RNX only)Revision HistoryRevision Date Summary of ChangesMigration Guide created1.0 12/7/121.1 6/7/13 Indicate PME_N1 (pin 17) for KSZ9031RNX is not an open-drain.Indicate INT_N (pin 38) is an open-drain for KSZ9021RN, but is not an open-drain for KSZ9031RNX.Indicate direct-access register 1Fh, bit [1] difference.。
Mechanical_Intro_15.0_L02_Basics

Release 15.0
… Toolbars
The Graphics toolbar graphical selection section: Select Geometry (vertex, face, etc.):
• Use single or box select modes. Filters
6 © 2014 ANSYS, Inc. February 12, 2014 Release 15.0
C. Menus
The View menu: • • • • • Control basic graphics (shaded, wireframe, etc.). Control graphical expansion of shells and beams. Control display utilities (legend, triad, ruler, etc.). Set preferences for annotation display. Select the desired toolbars and windows to be displayed.
A
B
C
D
E
F
G
H
A. Activate the Mechanical Wizard.
B. Object Generator.
C. Solve. D. Populate the message windows with the appropriate error message for any tree objects that are not properly defined.
© 2014 ANSYS, Inc. February 12, 2014 Release 15.0
伟格兴MSATA技术规格书

WELLCORE○R SSD MSATA W10 SeriesProduct Specification V1.0 May-2012NOTE:INFORMATION IN THIS DOCUMENT IS PROVIDED IN CONNECTION WITH WELLCORE PRODUCTS, NO LICENSE, EXPRESS OR IMPLIED, BY ESTOPPEL OR OTHERWISE, TO ANY INTELLECTUAL PROPERTY RIGHTS IS GRANTED BY THIS DOCUMENT, TO ANY INTELLECTUAL PROPERTY RIGHTS IN WELLCORE PRODUCT OR TECHNOLOGY,ALL PRODUCT SPECIFICATIONS ARE PROVIDED FOR REFERENCE ONLY, INFORMATION IN THIS PRODUCT SPECIFICATION IS SUBJECT TO CHANGE AT ANYTIME WITHOUT NOTICE.Wellcorping Technology Co., Ltd© WELLCORE 2011. All rights reserved Table of Contents1.Introduction (3)1.0 Overview (3)1.1 Capacity Specifications (3)1.2 Product Specifications (4)2. Product numbering scheme (5)3. Functional Block Diagram (6)4. Mechanical Information (7)4.0 Form factor (7)4.1 Pin Locations (8)4.2 Signal Descriptions (8)5. Electrical Characteristics (9)6. Environmental Conditions (9)6.0 Temperature (9)6.1 Shock, Vibration (10)7. Supported Command Sets (11)7.0 ATA Command set (11)7.1 ATA COMMAND SPECIFICATIONS (13)7.2 S M A R T command set (17)8.NCQ Command (22)Wellcorping Technology Co., Ltd1.Introduction1.0 OverviewWELLCORE SSD MSATA W10 Series purely consists of semiconductor devices and NAND flash moving parts. It gives rugged features against shock and vibration, used in extreme environment such as industrial PC or automotive device to increase reliability,The SSD is designed to use the SATA interface efficiently during both READs and WRITEs while delivering bandwidth-focused performance. SSD technology enables en-hanced boot times, faster application load times, reduced power consumption, and ex-tended reliability.1.1 Capacity Specifications. This chapter is about the specifications of the W10 Series MSATA SSD.Part Numbers Capacity Flash typeW10SM5*C-***2GB MLC/SLC 4GB MLC/SLC 8GB MLC/SLC 16GB MLC/SLC 32GB MLC/SLC 64GB MLC/SLC 128GB MLC 256GB MLCTable 1 :Capacity Specifications. The letter ‘ * ’ means some information of the products, please visit the table 2 for more information.1.2 Product Specifications◆Form factor:MSATA(JEDEC:MO-300B). Form size : 50.8mm * 30.0mm * 3.85mm(LxWxH)◆SATA 3Gbps Bandwidth Performance. Sequential Read: Up to 160 MB/s. Sequential Write: Up to 160 MB/s. Random 4 KB Reads: Up to 6000 IOPS. Random 4 KB Writes: Up to 1000 IOPS◆Compliant with Serial ATA Revision 2.6 ,◆Support 1.5Gps/3.0Gps SATA I/II interface◆Supports BCH ECC 16 bits or 24 bits in 1024 bytes◆S M A R T (Self-Monitoring, Analysis and Reporting Technology) ◆Supports (NCQ) AND (TRIM) Command set◆Flash management algorithm:. static and dynamic wear-leveling, bad block management algorithm◆Data retention: 10 years◆Read endurance: unlimited◆Write endurance: >9 years. Condition: 100GB write/ day(SSD capacity=100GB, Nand flash endurance =5000 P/E Cycles, SSD WA=1.5)◆MTBF (Mean Time Between Failures): 2,000,000 hours◆Operating temperature:. Commercial: 0℃ ~ +70℃. Industrial: -40℃ ~ +85℃◆Power Consumption:. Active(write/read): 1.4 W. Idle : 0.5 W. Sleep: 0.3 W◆Weight: Up to 10 g◆Certifications: UL; CE; FCC; SATA-IO; Microsoft WHQL ◆Product Ecological Compliance: ROHSWellcorping Technology Co., Ltd2. Product numbering schemeEXAMPLE:P/N: W10SM5MC-032 ,Please refer to the following table content (Table 2).W1010 S M 5 M C-032032WELLCOR WELLCORPING PINGTechnologyTechnology SSD Controller: 10-JMICRON 20-NOVACHIPS 30-SMI 40-SANDFORCE50-PHISON60-S-SATA P-PATA E-PCIE Form Factor : 25-2.5 Inch 18-1.8 Inch 13-1.3 InchM5-50mm MSATA M7-70mm MSATA P5-50mm MSATA(PCIE) P7-70mm MSATA(PCIE)Z3-ZIF 1.3 Inch Z8-ZIF 1.8 Inch MI-MICRO 1.8寸 CF-CF CARD FA-CFAST CARD LF-LIF HS-HALFSLIMNAND NAND FLASH: FLASH: S-SLCM-MLC Operatingtemperature:C-Commercial (0℃~+70℃) I-Industrial (-40℃~+85℃) M-Military (-55℃~+150℃) capacity:001-1GB* * 512-512GB * * 1TB-1000GB* *Table 2: numbering scheme3. Functional Block DiagramFigure 3:Functional Block Diagram4. Mechanical Information4.0 Form Size: 50.8mm*30.0mm*3.85mm(LxWxH),refer Figure 4Figure 4: Form Size4.1 Pin Locations4.2 Signal DescriptionsPin PinDefinitions DefinitionsPin PinDefinitions DefinitionsP1 N o Connect P2 +3.3V P3 N o Connect P4 GND P5 N o Connect P6 +1.5V(No use)P7 N o Connect P8 N o Connect P9 GNDP10 N o Connect P11 N o Connect P12 N o Connect P13 N o Connect P14 N o Connect P15 GND P16 N o Connect P17 N o Connect P18 GND P19 N o Connect P20 N o Connect P21 GNDP22 N o Connect P23 SATA Differential TX+ based on SSD P24 +3.3V P25 SATA Differential TX- based on SSDP26 GND P27 GND P28 +1.5V(No use) P29 GNDP30 N o Connect P31 SATA Differential RX- based on SSD P32 N o Connect P33 SATA Differential RX+ based on SSDP34 GND P35 GND P36 N o Connect P37 GND P38 N o Connect P39 +3.3V P40 GND P41 +3.3V P42 N o Connect P43 GND P44 N o Connect P45 Vendor(No use) P46 N o Connect P47 Vendor(No use) P48 +1.5V(No use)P49 DAS/DSS(No use) P50 GND P51 Presence DetectionP52+3.3V5. Electrical CharacteristicsElectrical Characteristics Value Operating Voltage for 3.3 V (±5%)Min Max 3.14 V 3.47VPower Consumption (TYPE)Active(write/read)IdleSleep 1.4 W 0.5 W 0.3WNotes:1.Active power measured during execution of MobileMark* 2007 with SATA Link PowerManagement (LPM) enabled.2.Idle power defined as SSD at idle with SATA Link Power Management (LPM) enabled.6. Environmental Conditions6.0 TemperatureCase TemperatureOperating Non-operating Commercial :(0℃ ~ +70℃) Industrial: (-40℃ ~ +85℃)-55 ~ 95 ℃Temperature GradientOperating Non-operating 30 (TYP) ℃/hr 30 (TYP) ℃/hrHumidityOperating Non-operating 5 ~ 95% 5 ~ 95%Wellcorping Technology Co., Ltd6.1 Shock and VibrationShockOperating Non-operating 1,500 G (Max) at 0.5 msec 1,500 G (Max) at 0.5 msecVibrationOperating Non-operating 2.17 GRMS (5-700 Hz) Max3.13 GRMS (5-800 Hz) MaxNotes:1.Temperature gradient measured without condensation.2.Shock specifications assume the SSD is mounted securely with the input vibration applied to the drive-mounting screws.Stimulus may be applied in the X, Y or Z axis. Shock specification is measured using Root Mean Squared (RMS) value.3.Vibration specifications assume the SSD is mounted securely with the input vibration applied to the drive-mounting screws. Stimulus may be applied in the X, Y or Z axis. Vibration specification is measured using Root Mean Squared (RMS) value.Wellcorping Technology Co., Ltd© WELLCORE 2011. All rights reserved Command Name Code PARAMETERS USEDCommand NameCodeSCSNCYDRHDFTCHECK POWER MODEE5h O X X O X X DEVICE CONFIGURATION OVERLAY B1h X X X O X O EXECUTE DIAGNOSTICS 90h X X X O X X FLUSH CACHE E7h X X X O X X FLUSH CACHE EXT EAh X X X O X X IDENTIFY DEVICE ECh X X X O X X IDLEE3h O X X O X X IDLE IMMEDIATE E1h X X X O X X NOP00h F F F O X O INITIALIZE DEVICE PARAMETERS 91h O X X O O X READ BUFFER E4h X X X O X X READ DMA C8h or C9h O O O O O X READ DMA EXT 25h O O O O O X READ FPDMA QUEUED 60h O O O O O O READ LOG EXT 2Fh O O O O O O READ MULTIPLE C4h O O O O O X READ MULTIPLE EXT 29h O O O O O X READ NATIVE MAX ADDRESS F8h X X X O X X READ NATIVE MAX ADDRESS EXT 27h X X X O X X READ SECTOR(S) 20h or 21h O O O O O X READ SECTOR(S) EXT 24h O O O O O X READ VERIFY SECTOR(S) 40h or 41h O O O O O X READ VERIFY SECTOR(S) EXT 42h O O O O O X RECALIBRATE10h X X X O X X SECURITY DISABLE PASSWORD F6h X X X O X X SECURITY ERASE PREPARE F3h X X X O X X SECURITY ERASE UNIT F4h X X X O X X SECURITY FREEZE LOCK F5h X X X O X X SECURITY SET PASSWORDF1hXXXOXX7 ATA General Feature Command Set7.0 ATA Command set.This table with the following paragraphs summarizes the ATA command set.Command TableWellcorping Technology Co., Ltd© WELLCORE 2011. All rights reserved SECURITY UNLOCK F2h X X X O X XSEEK 7xh X X O O O XSET FEATURES EFh O X X O X OSET MAX F9h O O O O O OSET MAX ADDRESS EXT 37h O O O O O XSET MULTIPLE MODE C6h O X X O X XSLEEP E6h X X X O X XSMART B0h X X O O X OSTANDBY E2h X X X O X XSTANDBY IMMEDIATE E0h X X X O X XWRITE BUFFER E8h X X X O X XWRITE DMA CAh or CBh O O O O O XWRITE DMA EXT 35h O O O O O XWRITE DMA FUA EXT 3Dh O O O O O XWRITE FPDMA QUEUED 61h O O O O O OWRITE LOG EXT 3Fh O O O O O XWRITE MULTIPLE C5h O O O O O XWRITE MULTIPLE EXT 39h O O O O O XWRITE MULTIPLE FUA EXT CEh O O O O O XWRITE SECTOR(S) 30h or 31h O O O O O XWRITE SECTOR(S) EXT 34h O O O O O XWRITE VERIFY 3Ch O O O O O ONote:O = Valid, X = Don't careSC = Sector Count RegisterSN = Sector Number RegisterCY = Cylinder Low/High RegisterDR = DEVICE SELECT Bit (DEVICE/HEAD Register Bit 4)HD = HEAD SELECT Bit (DEVICE/HEAD Register Bit 3-0)FT = Features RegisterWellcorping Technology Co., Ltd© WELLCORE 2011. All rights reserved 7.1 ATA COMMAND SPECIFICATIONSCHECK POWER MODE (E5h)The host can use this command to determine the current power management mode.Sector Count result value-00h – device is in Standby mode80h – device is in Idle modeFFh – device is in Active mode or Idle modeDEVICE CONFIGURATION OVERLAY (B1h)Individual Device Configuration Overlay (DCO) feature set commands are identified by the value placed in the Feature field.The subcommands and their respective codes are listed below.Device Configuration Overlay Feature field valuesValue CommandsC0h DEVICE CONFIGURATION RESTOREC1h DEVICE CONFIGURATION FREEZE LOCKC2h DEVICE CONFIGURATION IDENTIFYC3h DEVICE CONFIGURATION SETDEVICE CONFIGURATION RESTORE (B1h/C0h)The DEVICE CONFIGURATION RESTORE command provides a method for a host to restore any setting previously changed by a DEVICE CONFIGURATION SET command and to restore the content of the IDENTIFY DEVICE data, IDENTIFY PACKET DEVICE data, and other feature settings in a device to their factory default settings. The results of thisaction are indicated by the data returned from the Input Data of a DEVICE CONFIGURATION IDENTIFY command.DEVICE CONFIGURATION FREEZE LOCK (B1h/C1h)The DEVICE CONFIGURATION FREEZE LOCK command provides a method for the host to prevent accidental modification of a device's DCO settings. After a device has completed a DEVICE CONFIGURATION FREEZE LOCK command without error, the device shall return command aborted for all DEVICE CONFIGURATION SET, DEVICE CONFIGURATION FREEZE LOCK, DEVICE CONFIGURATION IDENTIFY, and DEVICE CONFIGURATIONRESTORE commands until after the device processes a power-on reset. A device shall be in the factory_config state or thereduced_config state after processing a power-on reset. A device shall not exit the DCO_Locked state as the result of processing a hardware reset or a software reset.Wellcorping Technology Co., Ltd© WELLCORE 2011. All rights reserved DEVICE CONFIGURATION IDENTIFY (B1h/C2h)DEVICE CONFIGURATION IDENTIFY (B1h/C2h)The DEVICE CONFIGURATION IDENTIFY command causes a device to return a 512-byte data structure. The content of this data structure indicates the selectable commands, modes, and feature sets that the device is capable of disabling or modifying through processing of a DEVICE CONFIGURATION SET command. If a DEVICE CONFIGURATION SET command reducing a device's capabilities has completed without error, then:a) the response by a device to an IDENTIFY DEVICE, IDENTIFY PACKET DEVICE, and other commands, exceptthe DEVICE CONFIGURATION IDENTIFY command, shall reflect the reduced set of capabilities; andb) the response by a device to a DEVICE CONFIGURATION IDENTIFY command shall reflect the entire set of selectable capabilities.The phrase “is changeable” indicates that the feature may be disabled by the host using a DEVICE CONFIGURATION SET command. If the feature is not changeable then the device may support the feature but the DEVICE CONFIGURATION SET command shall not affect support of the feature.The format of the Device Configuration Overlay data structure is listed below.DCO Identify data structureWordValueDescription0002hData structure revision number1 0007hMultiword DMA modes supported Bit15:3 ReservedBit2 1 = Reporting support for Multiword DMA mode 2 and below is changeable Bit1 1 = Reporting support for Multiword DMA mode 1 and below is changeable Bit0 1 = Reporting support for Multiword DMA mode 0 is changeable 2 007FhUltra DMA modes supported Bit15:7 ReservedBit6 1 = Reporting support for Ultra DMA mode 6 and below is changeable Bit5 1 = Reporting support for Ultra DMA mode 5 and below is changeable Bit4 1 = Reporting support for Ultra DMA mode 4 and below is changeable Bit3 1 = Reporting support for Ultra DMA mode 3 and below is changeable Bit2 1 = Reporting support for Ultra DMA mode 2 and below is changeable Bit1 1 = Reporting support for Ultra DMA mode 1 and below is changeable Bit0 1 = Reporting support for Ultra DMA mode 0 is changeable 3-6Native MAXLBAMaximum LBA (QWord) Bit63:48 ReservedBit47:0 Maximum LBAWellcorping Technology Co., Ltd© WELLCORE 2011. All rights reserved Word Value Description7 0089h Command set/feature set supported part 1Bit15ReservedBit14 1 = Reporting support for the Write-Read-Verify feature set is changeableBit13 1 = Reporting support for the SMART Conveyance self-test is changeableBit12 1 = Reporting support for the SMART Selective self-test is changeableBit11 1 = Reporting support for the Forced Unit Access is changeable Bit10 Reserved for TLCBit9 1 = Reporting support for the Streaming feature set is changeableBit8 1 = Reporting support for the 48-bit Addressing feature set is changeableBit7 1 = Reporting support for the HPA feature set is changeableBit6 1 = Reporting support for the AAM feature set is changeable Bit5 1 = Reporting support for the TCQ feature set is changeableBit4 1 = Reporting support for the PUIS feature set is changeable Bit3 1 = Reporting support for the Security feature set is changeable Bit2 1 = Reporting support for the SMART error log is changeable Bit1 1 = Reporting support for the SMART self-test is changeable Bit0 1 = Reporting support for the SMART feature set is changeable8 0000h Serial ATA Command set/feature set supportedBit15:5 Reserved for Serial ATABit4 1 = Reporting support for the SSP feature set is changeableBit3 1 = Reporting support for asynchronous notification is changeableBit2 1 = Reporting support for interface power management is changeableBit1 1 = Reporting support for non-zero buffer offsets is changeable Bit0 1 = Reporting support for the NCQ feature set is changeable9 0000h Reserved for Serial ATA 10-20 0000h Reserved21 0000h Command set/feature set supported part 2Bit15 1 = Reporting support for the NV Cache feature set is changeable Bit14 1 = Reporting support for the NV Cache Power Management feature set is changeableBit13 1 = Reporting support for WRITE UNCORRECTABLE EXT is changeableBit12 1 = Reporting support for the Trusted Computing feature set is changeableBit11 1 = Reporting support for the Free-fall Control feature set is changeableBit10:0 Reserved22 0000h Command set/feature set supported part 3Bit15:0 Reserved23-207 0000h Reserved208-254 0000h Vender Specific255Checksum +A5h Integrity wordBit15:8 Checksum Bit7:0 SignatureWellcorping Technology Co., Ltd© WELLCORE 2011. All rights reserved DEVICE CONFIGURATION SET (B1h/C3h)The DEVICE CONFIGURATION SET command allows a host to reduce the set of optional commands, modes, or feature sets supported by a device as indicated by a DEVICE CONFIGURATION IDENTIFY command. The DEVICE CONFIGURATION SET command may modify the data returned by IDENTIFY DEVICE or IDENTIFY PACKET DEVICE. When the IDENTIFY DEVICE data or IDENTIFY PACKET DEVICE data is changed, the device shall respond ina manner consistent with the new data.If a bit is set to one in the DEVICE CONFIGURATION SET data transmitted to the device that is not set in the DCO data received from a DEVICE CONFIGURATION IDENTIFY command, no action is taken for that bit.Modifying the maximum LBA of the device also modifies the LBA value returned by a READ NATIVE MAX ADDRESSor READ NATIVE MAX ADDRESS EXT command.EXECUTE DIAGNOSITICS (90h)This command performs the internal diagnostic tests implemented by the drive. See ERROR register for diagnostic codes.FLUSH CACHE (E7h)This command is used by the host to request the device to flush the write cache. If there is data in the write cache, that data shall be written to the media. The BSY bit shall remain set to one until all data has been successfully written or an error occurs.FLUSH CACHE EXT (EAh)48-bit feature set mandatory command. This command is used by the host to request the device to flush the write cache. If there is data in the write cache, that data shall be written to the media. The BSY bit shall remain set to one until all data has been successfully written or an error occurs.IDENTIFY DEVICE (ECh)This commands read out 512Bytes of drive parameter information. Parameter Information consists of the arrangement and value as shown in the following table. This command enables the host to receive the Identify Drive Information from the device.Wellcorping Technology Co., Ltd© WELLCORE 2011. All rights reserved 7.2 SMART COMMAND SETSMART Function Set (B0h)Performs different processing required for predicting device failures, according to the subcommand specified in the Features register. If the Features register contains an unsupported value, the Aborted Command error is returned. If the SMART function is disabled, any subcommand other than SMART ENABLE OPERATIONS results in the Aborted Command error.Code Smart SubcommandD0h READ DATAD1h READ ATTRIBUTE THRESHOLDSD2h ENABLE/DISABLE ATTRIBUTE AUTOSAVED3h SAVE ATTRIBUTE VALUESD8h ENABLE OPERATIONSD9h DISABLE OPERATIONSDAh RETURN STATUSSMART READ DATA (B0h/D0h)This command returns 512-byte SMART Data Structure to the host with PIO data-in protocol. The register file has to contain D0h for Features register, 4Fh for LBA Mid register and C2h for the LBA High register.Byte Description0-1 Data structure revision number2-13 1st attribute data14-361 2nd-30th Individual attribute data362 Off-line data collection status363 Self-test execution status364-365 Total time in seconds to complete off-line data collection366 Reserved367 Off-line data collection capability368-369 SMART capability370 Error logging capability371 Self-test Failure Checkpoint372 Short self-test routine recommended polling time(in minutes)373 Extended self-test routine recommended polling time(in minutes)374-510 Reserved511 Data structure ChecksumWellcorping Technology Co., Ltd© WELLCORE 2011. All rights reserved Byte 2-361: Individual attribute dataByte Description0 Attribute ID1-2 Status Flag3 Attribute Value4 Worst Ever normalized Attribute Value5-10 Raw Attribute Value11 ReservedThe attribute ID information is listed in the following table:ID Description01h Read Error Rate02h Throughput Performance03h Spin Up Time05h Reallocated Sector Count07h Seek Error Rate08h Seek Time performance09h Power-On hours Count0Ah Spin Retry Count0Ch Drive Power Cycle CountA8h SATA PHY Error CountAAh Bad Block CountADh Erase CountAFh Bad Cluster Table CountC0h Unexpected Power Loss CountC2h TemperatureC5h Current Pending Sector CountF0h Write HeadWellcorping Technology Co., Ltd© WELLCORE 2011. All rights reserved MART READ ATTRIBUTE THRESHOLD (B0h/D1h)This command transfers 512 bytes of drive failure threshold data to the host.Byte Description0-1 Data structure revision number2-361 st th1 – 30 Individual attribute threshold data362-510 Reserved1 – 30 Individual attribute threshold data511 Data structure checksumSMART ENABLE/DISABLE ATTRIBUTE AUTOSAVE (B0h/D2h)This command enables and disables the optional attribute autosave feature of the device. This command may either allow the device, after some vendor specified event, to save the device updated attributes to non-volatile memory; or this command may cause the autosave feature to be disabled. The state of the attribute autosave feature, either enabled or disabled, shall be preserved by the device during all power and reset events.A value of zero written by the host into the device’s Count field before issuing this command shall cause this feature to be disabled. Disabling this feature does not preclude the device from saving SMART data to non-volatile memory during some other normal operation (e.g., during a power-on or power-off sequence or during an error recovery sequence).A value of F1h written by the host into the device’s Count field before issuing this command shall cause this feature to be enabled. Any other other non-zero value written by the host into this field before issuing this command is vendor specific. The meaning of any non-zero value written to this field at this time shall be preserved by the device during all power and reset events.SMART SAVE ATTRIBUTE VALUE (B0h/D3h)Saves any modified attribute values.SMART ENABL OPERATIONS (B0h/D8h)Enables the SMART function. This setting is maintained when the power is turned off and then back on. Once the SMART function is enabled, subsequent SMART ENABLE OPERATIONS commands do not affect any parameters.SMART DISABLE OPERATIONS (B0h/D9h)Disables the SMART function. Upon receiving the command, the drive disables all SMART operations. This setting is maintained when the power is turned off and then back on. Once this command has been received, all SMART commands other than SMART ENABLE OPERATIONS are aborted with the Aborted Command error.This command disables all SMART capabilities including any and all timer and event count functions related exclusively to this feature. After command acceptance, this controller will disable all SMART operations. SMART data in no longer be monitored or saved. The state of SMART is preserved across power cycles.Wellcorping Technology Co., Ltd© WELLCORE 2011. All rights reserved SMART RETURN STATUS (B0h/DAh)Reports the drive reliability status.Values reported when a predicted defect has not been detected:Cylinder Low register: 4FhCylinder High register: C2hValues reported when a predicted defect has been detected:Cylinder Low register: F4hCylinder High register: 2ChSTANDBY (E2h)This command causes the device to enter the Standby mode. If the Count field is non-zero then the Standby timer shall be enabled. The value in the Count field shall be used to determine the time programmed into the Standby timer. If the Count field is zero then the Standby timer is disabled.STANDBY IMMEDIATE (E0h)This command causes the drive to set BSY, enter the Sleep mode (which corresponds to the ATA “Standby” Mode), clear BSY and return the interrupt immediately.WRITE BUFFER (E8h)This command enables the host to write the contents of one 512-byte block of data to the device’s buffer. The READ BUFFER and WRITE BUFFER commands shall be synchronized within the device such that sequential WRITE BUFFER and READ BUFFER commands access the same bytes within the buffer.WRITE DMA (CAh)Write data to sectors during Ultra DMA and Multiword DMA transfer. Use the SET FEATURES command to specify the mode value.WRITE DMA EXT (35h)48-bit feature set mandatory command. Write data to sectors during Ultra DMA and Multiword DMA transfer. Use the SET FEATURES command to specify the mode value.WRITE DMA FUA EXT (3Dh)48-bit feature set mandatory command. This command provides the same function as the WRITE DMA EXT command except that regardless of whether volatile and/or non-volatile write caching in the device is enabled or not, the user data shall be written to non-volatile media before command completion is reported.WRITE FPDMA QUEUED (61h)NCQ feature set mandatory 48-bit command. This command causes data to be transferred from the host to the device.Wellcorping Technology Co., Ltd© WELLCORE 2011. All rights reserved WRITE LOG EXT (3Fh)This command writes a specified number of 512 byte blocks of data to the specified log.WRITE MULTIPLE (C5h)This command writes the number of logical sectors specified in the Count field. The number of logical sectors per DRQ data block is defined by the content of IDENTIFY DEVICE data word 59. If the number of requested logical sectors is not evenly divisible by the DRQ data block count, as many full blocks as possible are transferred, followed by a final, partial block transfer. The partial block transfer is for n logical sectors, where:n = Remainder (Count / DRQ data block count).Device errors encountered during WRITE MULTIPLE commands are posted after the attempted device write of the DRQ data block or partial DRQ data block is transferred. The command ends with the logical sector in error, even if the error was in the middle of a DRQ data block. Subsequent DRQ data blocks are not transferred in the event of an error.The contents of the Command Structure following the transfer of a DRQ data block that had a logical sector in error are undefined. The host should retry the transfer as individual requests to obtain valid error information. If IDENTIFY DEVICE data word 59 bit 8 is cleared to zero or IDENTIFY DEVICE data word 59 bits (7:0) are set to zero, and a WRITE MULTIPLE command is received by the device, and no successful SET MULTIPLE MODE command has been processed by the device, the device shall return command aborted. A successful SET MULTIPLE MODE command should precede a WRITE MULTIPLE command.WRITE MULTIPLE EXT (39h)48-bit feature set mandatory command. This command is similar to the Write Sectors command. Interrupts are not presented on each sector, but on the transfer of a block which contains the number of sectors defined by Set Multiple command.WRITE MULTIPLE FUA EXT (CEh)48-bit feature set mandatory command. This command provides the same functionality as the WRITE MULTIPLE EXT command except that regardless of whether volatile and/or non-volatile write caching in the device is enabled or not, the user data shall be written to non-volatile media before command completion is reported.WRITE SECTOR(S) (30h/31h)Write data to a specified number of sectors (1 to 256, as specified with the Sector Count register) from the specified address. Specify “00h” to write 256 sectors.WRITE SECTOR(S) EXT (34h)48-bit feature set mandatory command. Write data to a specified number of sectors (1 to 65536, as specified with the Sector Count register) from the specified address. Specify “00h” to write 65536 sectors.WRITE VERIFY (3Ch)This command is similar to the WRITE SECTOR(S) command, except that each sector is verified before the command is completed.Wellcorping Technology Co., Ltd8 NCQNCQ-Native Command QueuingThe WELLCORE W10 Series supports the Native Command Queuing (NCQ) command set, which includes:•READ FPDMA QUEUED•WRITE FPDMA QUEUEDNote:With a maximum queue depth equal to 32.Wellcorping Technology Co., Ltd。
NVIDIA Maximus Technology for ANSYS Mechanical 详解说
DU-06Use6467-001_v01 |er GuideSeptember 20112DOCUMENT CHANGE HISTORYDU-06467-001_v01Version Date Authors Description of Change01 August 3, 2012 Initial release02 September 10, 2012 EK, SP Minor edits, clarity regarding solver optimizationsTABLE OF CONTENTS Maximus Technology for ANSYS Mechanical (4)Prerequisite Skills (4)What This Document Contains (5)Benefits of Maximus Technology (5)OEMs for Maximus Technology (5)NVIDIA Maximus Technology (6)Maximus Computing Advantage (6)Elements of Maximus Technology (6)Basic Maximus Configuration (8)Maximus for ANSYS Mechanical (9)Enabling ANSYS Mechanical for Maximus (9)Monitoring GPU Activity with Maximus Configuration Utility (11)Supported Solver Types (12)Model Considerations (12)Troubleshooting (13)References (13)This document describes the basic settings, configuration, and monitoring of an NVIDIA® Maximus‐enabled workstation for ANSYS Mechanical solvers.This document does not replace any documentation provided by ANSYS for softwareofferings specific to CAE software. Refer to the documentation provided by ANSYS forANSYS software configurations.This document does not explain the fundamentals of ANSYS usage or the discipline ofCAE.PREREQUISITE SKILLSThis document is intended for persons responsible for optimizing a Maximus‐enabled workstation for ANSYS Mechanical. It is assumed the audience is familiar with, or has skilled experience with the following:④ANSYS Mechanical CAE Software④Computer Aided Engineering (CAE)④Graphics Processing Unit (GPU) functionality④Modern workstation terminology④Hardware connectivity④Physical system building skills④Thermal and electrical workstation system internals④Microsoft Windows configurationMaximus Technology for ANSYS MechanicalWHAT THIS DOCUMENT CONTAINSThis document provides an introduction to NVIDIA Maximus technology and how to enable your workstation and ANSYS Mechanical to use Maximus.④NVIDIA Maximus Technology starting on page 6 describes the benefits of NVIDIAMaximus technology, its key elements, and the basic system requirements forenabling Maximus on your workstation.④Maximus for ANSYS Mechanical starting on page 9 focuses on using Maximus withANSYS Mechanical. It explains how to enable Maximus for ANSYS Mechanical and monitor GPU activity. It identifies the solvers that are enabled for Maximus, describes model considerations, and troubleshooting tips when a solver workload does not perform to your expectations.④References on page 13 provides useful references to related documentation.BENEFITS OF MAXIMUS TECHNOLOGYFor a comprehensive overview of Maximus technology, its benefits, and how it is being used, go to /maximus.OEMS FOR MAXIMUS TECHNOLOGYA list of OEMs that carry Maximus platforms are listed at/maximus.This section describes the benefits of Maximus‐enabled workstations and applications, the key elements of Maximus technology, and the basic configuration for a Maximus‐enabled workstation.MAXIMUS COMPUTING ADVANTAGEIn the past, workstation architectures forced professionals to do graphics‐intensive and compute‐intensive work serially; often offline. NVIDIA Maximus technology represents a revolution for these professionals by enabling both tasks to be performed concurrently without experiencing any drop in performance.For example; a designer can work on design iteration B while running a simulation on design iteration A. Because these tasks are performed concurrently, it is possible to explore ideas faster and converge more quickly on the best possible answers. ELEMENTS OF MAXIMUS TECHNOLOGYMaximus is an enabling technology that brings together the professional 3D graphics capability of NVIDIA Quadro® GPUs with the massive parallel computing capabilities of the NVIDIA Tesla™ C2075 companion processors. Figure 1 illustrates the advantages of the Tesla processor.F F M QFFigure 1. igure 2 show Maximus ‐ena Quadro cardsFigure 2. Tesla Pe ws the perfor abled works s in the perfoSolidWor rformance rmance imp tation. The M ormance sca rks Scalingeprovements p Maximus co aling chart pg Chart possible with nfiguration lus oneTesl h ANSYS M can consist la card.Mechanical on of any ofthe n a eBASIC MAXIMUS CONFIGURATIONThis section describes hardware and software requirements for a Maximus‐enabled workstation running ANSYS Mechanical. Only the basic requirements are covered in this document. For further details about upgrading an eligible workstation to a Maximus configuration, refer to the NVI DIA Maximus System Builders’ Guide for Microsoft Windows 7‐64 document.Check that your system satisfies the following software and hardware requirements:④Microsoft Windows 7 – 64 bit operating system.④ANSYS Mechanical 14 with HPC License Pack. At the release date of this document,one HPC pack enables eight CPU cores and one entire GPU.④One NVIDIA Quadro card installed in the first x16 (x16 electrical) PCIe slot of thehost computer.④One NVIDIA Tesla card installed in the second x16 (x16 electrical) PCIe slot of thehost computerAfter ANSYS Mechanical becomes multi-GPU aware and if it is physically possible, youcan have more than one Tesla processor in your system. At the release date of thisdocument, ANSYS Mechanical is still single-GPU aware. Follow future announcementsfrom ANSYS and NVIDIA regarding multi-GPU awareness.At the release date of this document, Tesla C2075 is the only supported compute cardfor ANSYS Mechanical.NVIDIA recommends that no display device be connected to the Tesla C2075 DVI displayoutput.④NVIDIA Quadro/Tesla Driver 275.89, or newer ANSYS‐certified driver, correctlyinstalled. Refer to for a list of drivers for download④Correct installation and cabling with power connectors (as needed) of all NVIDIAgraphics cards. If you purchased your system from an OEM with the NVIDIA cards pre‐installed, no action is needed.No NVIDIA SLI (Scalable Link Interface) ribbon cable is necessary or required for aMaximus configuration.T ac n so E U 1.2.This section e ctivity. The s eed to be co olver worklo ENABLIN Use the follow . Select Tool . Select Solve explains how solvers that nsidered are oad that doe NG ANS wing proced s from the m e Process Set w to enable M can use Max e identified. es not perfor SYS MEC dure to enabl main menuttings… to dis Maximus for ximus are lis The section rm to your ex CHANIC le Maximus splay the Solv r ANSYS Me sted and cha also contain xpectations.AL FOR for ANSYS ve Process Se echanical an aracteristics ns trouble ‐shR MAXIM Mechanical ettings menund monitor G of models th hooting tips MUS :u .GPU hat for a3.4.5.6.7.. Check that . Click Adva . Select NVID . Click OK .. Open the A Search for displayed,* softwar * licens* ********BATCH M INPUT F 6 PA START-U STOP FI GPU ACC00000000 CURRENT Working to automatica provides th t My Compute nced… to dis DIA from the ANSYS Mec the text GPU , Maximus is re license ses). ********** ***** A MODE REQUE FILE COPY ARALLEL CP UP FILE MO ILE MODE CELERATOR 0 JOBNAME=f ogether with ally ensures he best perfo er is selected splay the Adv drop ‐down hanical solv U ACCELERA s not enabled agreement **********ANSYS COMMA STED (-b) MODE (-c) PUS REQUEST DE OPTION ENA VERSION=W file 14:22h ANSYS Me that ANSYS ormance.d on the Solv vanced Prope list of the Us ve.out file ATOR OPTIO d.t and FAR **********AND LINE A = NOLI = COPY TED= NORE = NORE ABLEDWINDOWS x62:46 OCT echanical so S Mechanica ve Process Set erties dialog se GPU accel to check tha ON ENABLED 12.212 (fo **********ARGUMENTS STYADAD4 RELE 24, 2011 C oftware, the M al runs on th Maximus fo ttings menu.menu.eration (if po at Maximus D . If this text or non-DOD ***************EASE= 13.0CP= 0Maximus dr he Tesla GPU or ANSYS Mech ossible) field.is enabled. string is not D ** * ******** UP201.811riverU. This settin hanical.t 101012 ngM UTumTcoFInerreMonitoriUtilityNVIDIA Mworkstatis accessQuadro dThe NVIDIAtility that prmemory andTypically, MCorrectly. FigFigure 3.n typical ANrror correctieduced by 13ng GPUMaximus Configtions only. Dowsible from in tdrivers.Maximus Crovides convutilization mCU is used ture 3 showsNVIDIA MNSYS Mechanon) off. Note3 percent.Activityguration Utilitwnload the MChe NVIDIA ConConfigurationvenient GPUmonitors foro ensure thas the MCU mMaximus Conical workfle that wheny with Mty (MCU) is suCU from http:ntrol Panel stan Utility (MCU processingr all supporteat ANSYS Mmenu page.onfiguratiolows, you haECC is on, aMaximuspported for M//www.nvidiaarting with thCU) is a sepcontrols. Thed GPUs inMechanical ison Utilityave the optioavailable meConfiguMaximus-enabl/maxime 304 releasearate graphihe MCU proa Maximus‐s using the syon to turn ECemory on thurationledmus. The MCUof theical softwareovides GPUenabled sysystem GPUsCC (memorye Tesla boarestem.syrd isThe MCU provides simple controls to enable or disable computational processing on an installed Quadro GPU. Use this feature to better tune the system for a particular workflow need.Supported Solver TypesANSYS Mechanical uses a companion Tesla GPU with a single job per GPU. The following ANSYS Mechanical solvers are Maximus‐enabled:④Direct sparse solver for SMP and distributed ANSYS④PCG and JCG iterative solvers for SMP and distributed ANSYSModel ConsiderationsSimulation models exist in a wide variety of sizes normally measured in degrees of freedom (DOF). Though all models may exhibit some level of GPU acceleration benefit, consideration should be given to the following factors to achieve maximum acceleration in ANSYS Mechanical:④Models that deploy the direct sparse solver:●Models with approximately 500 thousand to 8 million DOF typically yield the mostaccelerated performance.●All model sizes are supported, but for very large models beyond 8 million DOF,some work might exceed the 6GB GPU memory and therefore stay on the CPU.●Models should always run in‐core (system memory) to eliminate I/O.④Models that deploy the iterative PCG or JCG solver:●Models with approximately 500 thousand to 5 million DOF typically yield the mostaccelerated performance.●Model size must not exceed the 6GB memory or they will not run, and will need tobe restarted on CPUs‐only (ANSYS Mechanical will provide a message in this case).●The is no out‐of‐core option (models always runs in‐core for iterative solvers)●The MSAV option should be turned off, otherwise the GPU is deactivated. ANSYSWorkbench will automatically set MSAVE for models over 100,000 nodes.Solid structures always provide better performance than shell structures.TROUBLESHOOTINGThere may be times when a solver workload does not perform to your expectations. Following is a list of common items that typically hinder optimal performance of asolver on a Maximus‐enabled workstation:④The Tesla C2075 is not set to handle compute tasks.④ECC is turned ON for the Tesla C2075, or the Quadro 6000, or both. While enablingECC improves accuracy, it slows down performance.④The disk subsystem I/O rate is too slow or bandwidth is constrained.④There is not enough scratch disk space in the system.④The job unexpectedly runs out of core memory.④There is not enough memory in the system.④The ANSYS license does not provide support for Maximus.④The simulation job is too small. See “Model Considerations” on page 10.④MSAV option is set to ON.④Shell structure models are being used.④More CPUs are being used than necessary for the simulation job. More CPUs do notnecessarily add linearly to overall wall clock time performance.REFERENCES④ANSYS Support Documentation: Refer to /Support/Documentation ④NVIDIA Maximus Configuration Guide: Refer to NVIDIA Maximus System Builders’Guide for Microsoft Windows 7‐64NALDOWEXAInreriganwCoexHHDHDRNVcainThandeonprOOpTNVCoreC©oticeLL NVIDIA DESIGNOCUMENTS (TOGWARRANTIES, EXPXPRESSLY DISCLAPARTICULAR PUformation furnisesponsibility forghts of third parny patent rightsithout notice. Torporation produxpress written apDMIDMI, the HDMI lDMI Licensing LLOVI ComplianVIDIA Products tan only be sold ocorporate the dehis device is prond other intelleevice must be aunly, unless otherohibited.OpenCLpenCL is a traderademarksVIDIA, the NVIDorporation in theespective compaopyright2012 NVIDIA CorN SPECIFICATIONGETHER AND SEPPRESSED, IMPLIEAIMS ALL IMPLIEDRPOSE.shed is believedthe consequencrties that may rof NVIDIA CorpoThis publicationucts are not autpproval of NVIDIAogo, and High-DLC.nce Statemehat support Rovior distributed toevice into buyerotected by U.S. pctual propertyuthorized by ROVrwise authorizemark of Apple InDIA logo, Teslae U.S. and othenies with whichrporation. All rigNS, REFERENCE BPARATELY, “MATED, STATUTORY,D WARRANTIES Od to be accuratces of use of sucresult from its uoration. Specificsupersedes andthorized as critiA Corporation.Definition Multimnti Corporation’s Ro buyers with a’s products.patent numbersrights. The useVI Corporation and in writing bync. used under li, and Quadroer countries. Oththey are associaghts reserved.BOARDS, FILES, DTERIALS”) ARE B, OR OTHERWISOF NONINFRINGEte and reliable.ch information ose. No license iscations mentionereplaces all otical componentsmedia InterfaceRevision 7.1.L1 Avalid and existin6,516,132; 5,58e of ROVI Corpond is intended foROVI Corporatiicense to the Khare trademarksher company andated.DRAWINGS, DIAGBEING PROVIDEDE WITH RESPECEMENT, MERCHAN. However, NVIDor for any infrins granted by imed in this publicher informations in life supportare trademarksAnti-Copy Procesng authorization83,936; 6,836,54oration's copy por home and othion. Reverse enronos Group Inc.s and/or registd product nameGNOSTICS, LISTSD “AS IS.” NVIDICT TO THE MATNTABILITY, ANDDIA Corporationngement of pateplication of othcation are subjepreviously suppt devices or systor registered trss (ACP) encodinn from ROVI to p49; 7,050,698; aprotection technher limited pay-pngineering or di.ered trademarkes may be trade, AND OTHERIA MAKES NOTERIALS, ANDFITNESS FORassumes noents or othererwise underect to changeplied. NVIDIAtems withoutrademarks ofng technologypurchase andnd 7,492,896nology in theper-view usesisassembly isks of NVIDIAmarks of the。
罗技G系列外设宏命令编程参考文档

G-series Lua API 参考文档V8.50预览与概述手册目录手册目录....................................................................................................................... (2)内容预览....................................................................................................................... (3)参考文档...................................................................................................................... (4)标准 Lua 5.1 库...................................................................................................................40附录A ....................................................................................................................... (41)内容预览G-series Lua API 参考手册是一套使用 Lua 脚本编程语言描述并且为 G-series 系列游戏键盘提供高级脚本功能。
该文档是在假设您已初步掌握 Lua 脚本编程语言使用方法的前提下进行的。
如果您想了解更多信息请访问 。
每项 G 系列的配置文件都有一个默认的 Lua 脚本与其绑定,并且您可以根据您的喜好随意编辑或者自定义。
Multisim14.0汉化安装教程

1运行NI_Circuit_Design_Suite_14_0.exe,默认解压C盘,改成其他盘并记住位置,解压后会自动运行其文件夹下的autorun.exe如无运行可点击setup.exe直接安装。
2、点击第一项开始安装iLcom/multisimNl Circuit Design Suite 14.0>■ Install NI Clmiit Design Suite J_4・0View the Readme FileExplore the MediaExit叵i £001-2015 National ]nstrument?5. All rigtits reserved 3、输入任意Name和序列号,弹出窗口点击NO n ¥A1+!!o I000,co mVh£7 NATIONALJ^IMSTRUMEMTSIf sei I nfoimalion W7NATIOHALEnta this lolloping inkrmaiion. ^INSTRUMENTSFull Name: ddoooOrganisation: ddonoQ Install this product using the following serial numberSerial umber; D ASSESS SSSSS|Infall this product hr evaluation<< Back 「_ Nad>> | 匚ancel4、选择安装目录,注意不要带有中文一二N1 Circu吐Design Suite 14.0D eslinat ion DirecloiySelect the primaiy in^allaticn direc lory.National Instruments cornnuon files vjil be installed Io the pafh below,创defaulL TJI Circuit D e?ignclick Suite 14.0 will t)&inhaled in the Circuit D esign SiXe folder in this driechiy. Td accept thi?f Hent 0 therwise, click Browse to specify a diffefent fotder.Destinabcn [Jircctor^C: \Prograni Files GuGBj \ila.ti onal Irks|tTLmentsVBrowse.5、将选项中的勾去掉Pioduct NatilicaliensPlease lead Vie folo刈ing infoirri^tion ■about theconfigurartion >*ou have selected.| Seal ch for important messages and i<]dat&e on the Mational I nslrumertts products 网u are inelalling.T □ perform this search, yourIP addess will be collected n accordance vflth the N ational I nstrunients Privacy Policy.Note: You will be given the oppodunitv to select the updates you want to install.Pri¥日匚护Policy<< Back Next>> | 匚ance(_________________________________ _________________________ i _____________________ J-1■._______________________________6、勾选允许用户协议J NI Circuit Design Suite 14.0- 〔_________Licence Agieement ^^7 NATIONALYou nniift accept iht licenses displayed below to poceed. ™IH5TRtlMENn'时I btjcicchipNational Instruments^件许可协议妻裝须知:本怫谊具舍同皴力・在你右下载软件和丿或兗咸牧件妄装过稈之前.清仔细測读不协议*—旦你方下载和眉S点击相虑的按钮,川而完咸软件宝装过程,即羔示你方同意本协谏菜软并匾意査眾协谊的约克。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
• Notice the Model cell indicates a refresh
is necessary. 8.
9. Refresh the Model cell (RMB), then return to the Mechanical window.
9.
11
© 2011 ANSYS, Inc.
2
© 2011 ANSYS, Inc.
February 20, 2013
Release 14.0
Goals
Using the Stress Wizard, set up and solve a structural model for stress, deflection and safety factor. Problem statement:
6
© 2011 ANSYS, Inc.
February 20, 2013
Release 14.0
. . . Project Schematic
1. From the Toolbox choose create a Static Structural system (drag/drop or RMB). 1.
February 20, 2013
Release 14.0
. . . Preprocessing
10. Highlight “Part 1” and click the “Material > Assignment” field to change the material property to aluminum alloy.
Release 14.0
16. From the Mechanical Wizard request:
. . . Preprocessing
a) Insert Structural Results (the call out will point to the Solution b) c) d)
toolbar). Deformation > Total. Stress > Equivalent (von-Mises). Tools > Stress Tool. c.
10.
12
© 2011 ANSYS, Inc.
February 20, 2013
Release 14.0
. . . Preprocessing
11. Insert Loads:
a. Select “Insert Structural Loads” from the Wizard b. Follow the call out box to insert a “Pressure” load c. The tree will now include a Pressure load in the “Static
3. Double click the “Model” cell to open the Mechanical application. When the Mechanical application opens the model will display in the graphics window and the Mechanical Application Wizard displays on the right.
a. From the Mechanical Wizard choose “Verify Material” b. Notice the callout box indicates Engineering Data is accessible
from the WB2 interface (Project Schematic).
Structural” environment branch
b.
a.
c.
13
© 2011 ANSYS, Inc.
February 20, 2013
Release 14.0
. . . Preprocessing
12. Apply the load to geometry:
a) b) c) d)
Highlight one of the outer faces of the part. Use the “Extend to Limits” icon to select the remaining 16 faces (total 17 faces selected). Click “Apply” to accept the faces. Enter a “Magnitude” of 1MPa.
Release 14.0
. . . Preprocessing
7. Activate the Data Source toggle and highlight “General Materials” then click the ‘+’ next to “Aluminum Alloy”. 8. Return to the Project.
Workshop 2.1 ANSYS Mechanical Basics
14. 0 Release
Introduction to ANSYS Mechanical
1 © 2011 ANSYS, Inc. February 20, 2013 Release 14.0
Notes on Workshop 2.1
4
© 2011 ANSYS, Inc.
February 20, 2013
Release 14.0
Environment
Loads: the load consists of a 1 MPa pressure applied to the 17 exterior surfaces of the cover.
15. Repeat Steps 13.a. and 13.b. to insert a “Frictionless Support” on the lip surface at the bottom of the recess.
16
© 2011 ANSYS, Inc.
February 20, 2013
a. b.
c. Return to the Project schematic window and double click
“Engineering Data” to access the material properties.
c.
10
© 2011 ANSYS, Inc.
February 20, 2013
mV, mA).
• From the main menu go to “Units > Metric (mm, kg, N, s,
9
© 2011 ANSYS, Inc.
February 20, 2013
Release 14.0
. . . Preprocessing
5. Select a suitable material for the panc.
February 20, 2013
Release 14.0
Assumptions
We will represent the constrains on the counter bores, bottom contact area and inner sides using frictionless supports.
2. 2. RMB in the Geometry cell and Import Geometry. Browse to the file “Cap_fillets.stp”.
7
© 2011 ANSYS, Inc.
February 20, 2013
Release 14.0
Preprocessing
3.
When Mechanical starts if the Wizard is not displayed, use the icon to open it.
8
© 2011 ANSYS, Inc.
February 20, 2013
Release 14.0
. . . Preprocessing
4. Set/check the units system:
• The model consists of a STEP file representing a control • •
box cover (see figure). The cover is intended to be used in an external pressure application (1.0 MPa). The cover is to be made from aluminum alloy. Our goal is to verify that the part will function in its intended environment.
b.
a. c. d.
© 2011 ANSYS, Inc. February 20, 2013 Release 14.0
14
. . . Preprocessing
13. Apply supports to constrain the part:
a. Select “Insert Supports” from the Wizard. b. Follow the callout box to insert a “Frictionless Support”. c. “Apply” it to the 4 counter bore surfaces of the part.
b.
a.
c.
15
© 2011 ANSYS, Inc.