XMC 用户手册
XMC4000中文参考手册-第07章 存储器组织
地址空间 外部专用总线
生产商指定 1 生产商指定 2 7.4
E0100000 F0000000
服务请求生成
存储模块和其他系统组件能够产生表明对 CPU 总线错误异常或中断的错误响应。 错误原因的类型 未支持的存取模式 访问无效的地址 奇偶校验误差(仅存储器) 缓冲写入访问外设
不能用总线错误表明的错误表示作为中断传播到 CPU 的服务请求。通常,缺乏总线错误反应 能力,适用于缺乏从系统总线直接访问存储模块,这适用于服务内部 FIFOs 和本地存储缓冲器 目的存储器。 不支持的访问模式 不支持的访问模式可以用很多种方式分类,并且经常指定给执行访问的模块。典型的不支持的 访问模式的例子是读取访问至只写或写入访问至只读地址映射资源,不支持的存取数据宽度, 保护存储区域。欲了解模块特定限制,请参考单独模块章。
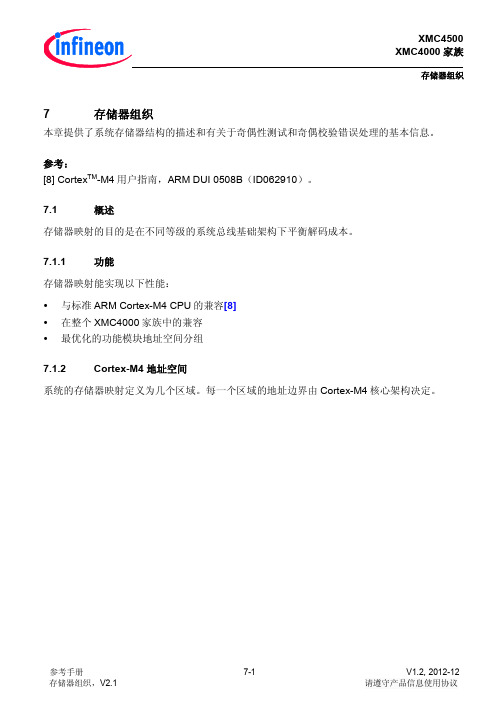
图 7-1
Cortex-M4 处理器地址空间
参考手册 存储器组织,V2.1
7-2
V1.2, 2012-12 请遵守产品信息使用协议
XMC4500 XMC4000 家族
存储器组织
7.2
存储器区域
XMC4500 装置特定地址映射呈现了内部和外部存储及外设的存在。XMC4500 存储区在表 7-1 中都有描述。 表 7-1 开始 00000000 存储区 结束 1FFFFFFF 大小(十六进制) 20000000 空间名称 代码 用法 引导只读存储器(ROM) 闪存 程序存储器(SRAM) 20000000 40000000 48000000 50000000 58000000 60000000 A0000000 E0000000 E0100000 F0000000 3FFFFFFF 47FFFFFF 4FFFFFFF 57FFFFFF 5FFFFFFF 9FFFFFFF DFFFFFFF E00FFFFF EFFFFFFF FFFFFFFF 20000000 08000000 08000000 08000000 08000000 40000000 40000000 00100000 0FF00000 10000000 SRAM 外设 0 外设 1 外设 2 外设 3 外部 SRAM 外部设备 专用 外部总线 厂商指定 1 厂商指定 2 保留 保留 快速内部 SRAM 内部 外设 组 0 内部 外设 组 1 内部 外设 组 2 内部 外设 组 3 外部存储 外部设备 CPU
XMC4000中文参考手册-第10章 实时时钟(RTC)
RTC 生成唤醒触发的条件: 周期定时器事件 配置报警条件
ห้องสมุดไป่ตู้
定时器事件可以在休眠域中作为从休眠模式唤醒触发被处理,在休眠域的 HCU 模块(更多细节请 参考 SCU 章中对休眠控制的描述)。 10.5.1 周期性唤醒触发生成
只要定时器的非屏蔽字段得到更新,周期性的定时器唤醒触发就会被生成。周期性唤醒触发的 生成可以被 CTR 寄存器启用/禁止。 10.5.2 定时器警报唤醒触发生成
只要 TIM0 和 TIM1 的所有位段值与 ATIM0、ATIM1 寄存器对应的位字段值匹配,警报唤醒触 发就会被生成。定时器报警唤醒触发的生成可以被 CTR 寄存器启用/禁止。
参考手册 RTC, V2.4
10-4
V1.2, 2012-12 请遵守产品信息使用协议
XMC4500 XMC4000 家族
参考手册 RTC, V2.4
10-7
V1.2, 2012-12 请遵守产品信息使用协议
XMC4500 XMC4000 家族
时钟(RTC)
10.9
寄存器
寄存器概述 绝对的寄存器地址通过下式算出: 模块基址+偏移地址 表 10-2 模块 RTC 表 10-3 缩写 寄存器地址空间 基址 5000 4A00H 寄存器概述 寄存器全称 偏移地址 访问方式 读 RTC 核心寄存器 ID CTR RAWSTAT STSSR MSKSR CLRSR ATIM0 ATIM1 TIM0 TIM1 10.9.1 ID RTC 模块中的只读 ID 寄存器包含唯一的 RTC 模块身份代码。 ID 寄存器 控制寄存器 原始服务请求寄存器 状态服务请求寄存器 屏蔽服务请求寄存器 清除服务请求寄存器 报警定时寄存器 0 报警定时寄存器 1 定时寄存器 0 定时寄存器 1 寄存器描述 0000H 0004H 0008H 000CH 0010H 0014H 0018H 001CH 0020H 0024H U,PV U,PV U,PV U,PV U,PV BE U,PV U,PV U,PV U,PV BE PV BE BE PV PV PV PV PV PV 10-8 页 10-9 页 10-11 页 10-12 页 10-13 页 10-14 页 10-15 页 10-16 页 10-17 页 10-19 页 写 描述 结束地址 5000 4BFFH 注释 通过镜像寄存器访问
XMC4800—Mulitican模块中文版手册

XMC4800 MultiCAN模块中文手册一:XMC4800 简介英飞凌XMC4800属于XMC4000系列中的一个子型号,时英飞凌公司基于Cotex-M4内核开发的集成片上EtherCAT(用于控制和自动化技术的以太网)节点的全新32位微控制器。
其部分参数如下表:CPU frequency 144MHZFlash 2.5MBRAM 512KBCache 6KBPOSIF 2xCCU4(4ch) 4xCCU8(8ch) 2xADC 12-Bit 4xDelta/Sigma Demodulator 4xDAC 2xEthernet MAC/EtherCAT MAC 2x/1xUSB FS OTGUSIC 6XCAN 6x二:MuLtiCAN 模块介绍2.1 MuLtiCAN 模块简述:XMC4800的MuLtiCAN模块包含6个可独立运行的符合ISO 11898和SAE J1939的CAN节点,每个节点都支持通过网关或远程帧模式交换数据。
MultiCAN模块提供256个“消息对象”用于接收和处理CAN报文,这256个消息对象可以自由分配给任何一个节点使用,一个消息对象只能映射到一个CAN节点。
每个节点都有自己的消息对象列表,这些列表可以组成FIFO方式缓存报文,也可以用作网关模式。
报文的处理流程如下图所示。
我们使用一种快递模型来理解MuLtiCAN的工作模式。
假定MCU为一个区域的承包人,那么他需要将自己承包的区域划分为不同的部分由不同的加盟店来完成该区域的工作,划分区域其实就是安排加盟店(CAN-NODE),每一个加盟店在收到物流网络上的包裹(报文)之后需要人工进行筛选(Message Objects)决定那些包裹(报文)需要处理,接收需要处理的,丢弃不需要处理的。
每个加盟店可以由区域承包人(MCU)安排需要多少工人(Message Objects),每个工人(Message Objects)可以接收的包裹(报文)的地址范围。
XMC4800—Mulitican模块中文版手册

XMC4800 MultiCAN模块中文手册一:XMC4800简介英飞凌XMC4800属于XMC4000系列中的一个子型号,时英飞凌公司基于Cotex-M4内核开发的集成片上EtherCAT(用于控制和自动化技术的以太网)节二:MuLtiCAN模块介绍2.1 MuLtiCAN模块简述:XMC4800的MuLtiCAN模块包含6个可独立运行的符合ISO 11898和SAE J 1939的CAN节点,每个节点都支持通过网关或远程帧模式交换数据。
MultiCAN模块提供256个“消息对象”用于接收和处理CAN报文,这256个消息对象可以自由分配给任何一个节点使用,一个消息对象只能映射到一个CAN节点。
每个节点都有自己的消息对象列表,这些列表可以组成FIFO方式缓存报文,也可以用作网关模式。
报文的处理流程如下图所示。
我们使用一种快递模型来理解MuLtiCAN的工作模式。
假定MCU为一个区域的承包人,那么他需要将自己承包的区域划分为不同的部分由不同的加盟店来完成该区域的工作,划分区域其实就是安排加盟店(CAN-NODE),每一个加盟店在收到物流网络上的包裹(报文)之后需要人工进行筛选(Message Objects)决定那些包裹(报文)需要处理,接收需要处理的,丢弃不需要处理的。
每个加盟店可以由区域承包人(MCU)安排需要多少工人(Message Objects),每个工人(Message Objects)可以接收的包裹(报文)的地址范围。
对于大规模的包裹(报文)的处理还可以安排多个(Message Objects)组成流水线(FIFO)形式处理,以满足客户需要大规模投递需要。
所以我们需要使用MuLtiCAN模块实现CAN总线通信功能需要完成以下内容:1.初始化CAN-NODE2.初始化Message Object(接收/发送滤波)3.为CAN-NODE分配可用的Message Object(List)4.使能物理引脚,打开中断2.2 MuLtiCAN模块主要寄存器简述:2.2.1 Global Module Registers2.2.1.1 Module Identification Register(模块识别寄存器)(ID)作用:CAN节点的消息对象列表分配与管理面板。
XMC4000中文参考手册-第08章 闪存与程序存储器单元(PMU)

参考手册 PMU,V1.18
8-6
V1.2, 2012-12 请遵守产品信息使用协议
XMC4500 XMC4000 家族
闪存与程序存储单元(PMU)
字线:一条“字线”由两页组成,一个偶数页和一个奇数页。在 PFLASH 中一条字线包含 512 字节对齐。 页:“页”是一条字线正在编程的部分。在 PFLASH 中一页包含一个 256 字节对齐组。 闪存结构
8.1.1
PMU 框图如图 8-1 所示。
图 8-1
PMU 框图
8-1 V1.2, 2012-12 请遵守产品信息使用协议
ห้องสมุดไป่ตู้
参考手册 PMU,V1.18
XMC4500 XMC4000 家族
闪存与程序存储单元(PMU)
8.2
Boot ROM(BROM)
在 PMU0 中的 Boot ROM 有 16KB 的容量。BROM 包含的固件有: 启动程序 引导程序装载软件
预取单元的作用是减少更高系统频率下的闪存延迟差距,以增强每周期指令性能。 8.3.1 概述
预取单元将性能和闪存的数据访问按如下配置分开: 4K 字节指令缓冲区 — 双向设置关联 — 最近最少使用(LRU)的替换策略 — 缓存线大小:256 位 — 关键字优先 — 流动式接收 1) — 线环绕 — 奇偶校验,32 位粒度 — 可旁路缓冲区 — 可全局失效的缓冲区 256 字节数据缓冲区 — 单行缓冲线 — 关键字优先 — 流动式接收 1) — 线环绕 _________________
参考手册 PMU,V1.18
8-5
V1.2, 2012-12 请遵守产品信息使用协议
XMC4500 XMC4000 家族
XMC4000中文参考手册-第09章 窗口看门狗定时器(WDT)

9.8.1
初始化和启动操作
系统复位后,需要完成WDT模块的初始化。 • 检查最后一次系统复位的原因,以确定电源状态 - 读出SCU_RSTSTAT.RSTSTAT寄存器位段,确定最后一次系统复位的原因 - 依据最后系统复位的原因执行适当的操作 看门狗软件初始化序列 用SCU_CLKSET.WDTCEN寄存器位段启用WDT时钟 用SCU_PRCLR2.WDTRS寄存器位段释放WDT复位 用WDT_WLB寄存器设置窗口下限 用WDT_WUB寄存器设置窗口上限 配置外部看门狗服务指示(可选,请参阅SCU/HCU章节) 用SCU_WDTCLKCR寄存器选择和启用WDT输入时钟 用SCU_NMIREQEN寄存器在系统级上启用系统陷阱预警报警(可选,仅用在WDT预警 模式) 软件启动序列 - 选择模式(超时或预警)和用WDT_CTR寄存器启用WDT模块 服务看门狗 - 在WDT_TIM寄存器中,对编程时间窗口检查当前定时器值 - 在有效时间窗内,写魔字到WDT_SRV寄存器 9.8.2 重新配置和重新启动操作 - - - - - - -
参考手册 WDT, V2.3
9-3
V1.2, 2012-12 请遵守产品信息使用协议
XMC4500 XMC4000 家族
窗口看门狗定时器(WDT)
图 9-2
无预警复位
图 9-2中描绘的示例场景展示了在有效时间窗口内WDT模块成功服务后产生的两个连续的服务 脉冲。对于没有服务执行的情况,在计数器的值已经超过窗口上限值后立即触发在wdt_rst_req 输出上的复位请求生成。 9.3 预警模式
在预警模式时,溢出事件的作用在有和没有启用预警是不同的。当预警启用时,计数器第一次 超过上限时触发输出报警信号wdt_alarm。只能在下一个溢出产生复位请求。报警状态通过寄 存器WDTSTS指示且通过寄存器WDTCLR清除。清除报警状态将使WDT回到正常状态。报警 信号发送请求到SCU,在那里上报到NMI。
XMC4000中文参考手册-第06章 灵活的CRC引擎(FCE)
灵活的CRC引擎(FCE)6 灵活的CRC引擎(FCE)FEC提供一个循环冗余码(CRC)算法的并行执行。
现行XMC4500微控制器的FCE版本能实现符合IEEE802.3的以太网CRC32,CCITT的CRC16和SAE J1850的CRC8多项式算法。
FCE的基本目标是作为一个为使用CRC识别标志的软件应用或操作系统服务的硬件加速引擎。
FCE作为一个标准外围总线从设备操作,通过一组配置和控制寄存器实现完全控制。
不同的CRC算法彼此相互独立,它们可以同时用在不同的软件任务上。
注:在6-11页描述为“寄存器”的FCE内核寄存器名称是参考于一个产品参考手册上的模块名称前缀“FCE_”。
参考文献[5] 一个无痛的CRC错误检测算法指南,Ross N.Williams[6] 互联网应用的32字节CRC,Philip Koopman,独立系统和网络(DSN)国际会议,2002相关标准和规范[7] IEEE 802.3 的以太网32位CRC表6-1 FCE涉及的缩写词CRC 循环冗余码FCE 灵活的循环冗余码引擎IR 输入寄存器RES 结果STS 状态CFG 配置6.1 概述本节提供了FCE模块的功能,应用和逻辑结构的概述。
6.1.1 功能FCE提供如下功能:• FCE执行如下的循环冗余码多项式:灵活的CRC引擎(FCE)— CRC内核0和1:IEEE802.3 CRC32以太网多项式:0x04C11DB71) - x32+x26+x23+x22+x16+x12+x11+x10+x8+x7+x5+x4+x2+x+1 —CRC内核2:CCITT CRC16 多项式:0x1021 - x16+x12+x5+1— CRC内核3:SAE J1850 CRC8多项式:0x1D - x8+x4+x3+x2+1• 并行CRC实现—通过FCE计算的数据块会是一个多重二次多项式—通过FCE计算的数据块的开始地址会被排列到二次多项式中• 寄存器接口:— 输入寄存器— CRC寄存器— 配置寄存器启用控制CRC操作和对信息的末端进行自动校验。
英飞凌XMC4200数字电源控制卡用户手册说明书
XMC400032-bit Microcontroller Series for Industrial ApplicationsXMC4200 Digital Power Control Card User ManualUG_201511_PL30_003Board User ManualScope and purposeThis document describes the features and hardware details of XMC4200 Digital Power Control Card, designed to provide an evaluation platform for digital control applications with XMC ARM® Cortex™M4F based microcontroller. This board is part of Infineon’s Digital Power Explorer Application Kit.Applicable Products∙ XMC4200 Microcontroller∙XMC Digital Power Explorer Kit∙DAVE™References (optional, may be shifted to Appendix)Infineon: DAVE™, /DAVEInfineon: XMC Family, /XMCXMC Digital Power Explorer, /xmc_dp_expExample codes for this board, /DAVETable of Contents1Overview (3)1.1Key Features (3)1.2Block Diagram (3)2Hardware Description (5)2.1Power Supply (5)2.2Clock Generation (6)2.3Debug Interface (6)2.3.1Debug Connector Options (7)2.3.2Removing the On-Board Debugger (8)2.4User LEDs and testpoints (8)2.5EEPROM (9)2.6Power Board Connector (9)2.7Analog to Digital Converter (ADC) inputs filter (12)3Prodcution Data (14)3.1Schematics (14)3.2Component Placement (18)3.3Bill Material (BOM) (18)4Revision History (21)1OverviewThe XMC4200 Digital Power Control Card is an evaluation board with the goal to help engineers in the learning and testing of digital power control applications. The board features a XMC4200 microcontroller based on ARM® Cortex™M4F core.The dimensions of the board (50 mm height, 45 mm width to connector) allow the usage of this evaluation card into designs with high requirements on power density. In particular dimensions of XMC4200 Digital Power Control Card are suitable for 1U rack designs. The control card integrates an isolated on board debugger for plug and play experience. The isolated debugger part can be detached once the code is finalized.This board has been developed with the collaboration of Würth Elektronik whose passive components and mechanical components are used.1.1Key FeaturesThe XMC4200 Digital Power Control Card is equipped with the following features∙Infineon XMC4200 (ARM® Cortex™-M4F-based) Microcontroller, 256 kByte on-chip Flash, LQFP64∙Connection to power board like Digital Power Explorer, via the power board connector including analog signals, PWM or serial interfaces∙ 5 LEDs−1 Power indicating LED - “Power OK” from power board side−2 User LEDs (P2.2, P2.6)−2 Debugger controller LEDs (DEBUG, COM)∙Isolated Debug options−On-Board Debugger (SEGGER J-Link LITE) via USB connector−ARM® Cortex™9 pin connector (1.27 mm pitch - double row) on non-isolated section. Isolation needs to be built between this connector and the computer side to avoid overvoltage in computer.∙Isolated Connectivity−UART channel of On-Board Debugger (SEGGER J-Link LITE) via USB connector∙Power supply of MCU domain−Via power board connector (12V). Converted to 3.3V with Infineon supply parts∙Power supply of isolated debug domain−Via Debug USB connector1.2Block DiagramFigure 1 shows the functional block diagram of the XMC4200 Digital Power Control Card. For more information about the power supply domains please refer to chapter 2.1.The control card has got the following building blocks:∙ 1 Power Board Connector∙ 1 I2C controlled EEPROM for optional data storage∙ 2 User LED connected to GPIOs (P2.2 and P2.6)∙ 2 user test points∙USIC0 interface connector (P0.10, P0.14, P1.4, P1.5)Isolated On-board Debugger via Debug USB connector (Micro-USB) with UART channel (USIC0, channel0)Optional ARM® Cortex™-Debug interface connectorFigure 1 Block Diagram of XMC4200 Digital Power Control Card2Hardware DescriptionThe following sections give a detailed description of the hardware and how it can be used.Board_Interfaces_XMC42.emfXMC4200 MicrocontrollerPower indicatingLEDPower Board ConnectorDebug Connector optionsPower GND DomainIsolated domainEEPROMTest pointsTest LEDsADC inputs testpointsUSB connectorto PCDebugger controller – XMC4200Galvanic isolation ICPower supplycircuitARM Cortex 9 pin debugger connectoroption Split debugger lineFigure 2 XMC4200 Digital Power Control Card hardware description2.1 Power SupplyThe XMC4200 Digital Power Control Cardboard is designed with two galvanically isolated supply domains. On the left side, there is the debug domain or isolated domain, which contains a XMC4200 MCU as on-board debug controller (OBD). The isolated domain is powered via the USB plug (5V)The rest of the control card is called power GND supply domain. This part is supplied from the power board connector and the control card will step down the input voltage to the 3.3V that XMC4200 requires. This supply domain is usually powered from the power board connector. The typical current drawn by the drive card at the power GND domain is about 65 mA at 12 V input voltage.To indicate the power status of the power GND domain, one power indicating LED is provided on board (see Figure 2). The LED will be “ON” when the corresponding power rail is powered.Figure 3 shows details of the power supply concept of the control card. More detailed circuitry can be foundFigure 3 Block Diagram of Power Supply Concept2.2Clock GenerationAn external oscillator circuit is provided in the control card to provide a crystal signal. The internal PLL of XMC4200 will trace care to generate all internal clocks needed in the microcontroller.2.3Debug InterfaceThe XMC4200 Digital Power Control Card supports 2 different debug interfaces:∙Isolated On-Board Debugger (OBD). This is the default connection.Connect to computer with an USB cable. The control card includes a debugger controller and isolation up to 1kV to protect the computer. This is the easiest way and is supported by DAVE TM and otherdebuggersThe On-Board Debugger [1] supports∙Serial Wire Debug (SWD)∙UART communication via a Virtual COM porto PC_RXD_DEV P1.5 USIC0CH0.DOUT0o PC_TXD_DEV P1.4 USIC0CH0.DX0B[1] Attention: The firmware of the on-board debugger requires the latest J-Link driver (V5.00 or higher) anda Serial Port Driver (CDC driver) installed on your computer. Please check “Install J-Link Serial PortDriver” when installing the latest J-Link driver (see Figure 4)Figure 4 Installation of J-Link Serial Port Driver∙9 pin ARM® Cortex™ connector and an externa l galvanically isolated debugger hardware or “box”. This option allows the user to utilize any ARM® Cortex™ debugger in the market. The user must make sure that the debugger box used provides galvanic isolation (typically 1kV) to avoid damage due to high voltages in the computer.2.3.1Debug Connector OptionsXMC4200 Digital Power Control Card includes 3 connector options for debugging. The default configuration of the control card is prepared for OBD debug and therefore, none for the 3 connector options are assembled. If required, user has to mount the corresponding pin headers. The 3 connector options are:∙Two 8 pins connector: OBD Debug Connector (X301) and Debug Connector (X102)– 2.54 mm header pitch ∙9pin ARM® Cortex™ (X101)– 1.27mm header pitchConnectors are described in Figure 5Figure 5 Pin assignment of Debug Connector (8-pin)2.3.2Removing the On-Board DebuggerXMC4200 Digital Power Control Card can be broken off into 2 parts by breaking the PCB as shown in Figure 6. This will reduce the size of the main controller part so that it can fit into 1U standard sized rack systems once programmed. The control card can still be debugged in 2 different ways if debugger part is removed (see Figure 6):1.connecting a ribbon cable to both 8 pin connectors (main controller part and debugger part) or,ing the 9 pin connector option with an external debugger box. If the board is not broken, thisconnection cannot work.Attention: when using external debuggers, make sure that the debugger box includes a galvanic isolation to the computer. If the control card is exposed to high voltages, this could producedamage to the computerFigure 6 Debug options when removing debugger part of control card2.4User LEDs and test pointsThe XMC4200 Digital Power Control Card provides a two user LEDs (P2.2 and P2.6). Next to the LEDs, two test points (P2.0 and P2.1) are available in order to easily connect an oscilloscope’s probe for controlled trigger signals.Table 1 User LEDsTable 1Attention: The test points are referenced to power GND supply domain. Hence they may carry hazardous voltages.2.5EEPROMXMC4200 Digital Power Control Card includes as well an external 4kB EEPROM for different purpose. This EEPROM communicates with XMC4200 through I2C communication. XMC4200 can be configured as master I2C for that purpose. This can be used for storing parameters for example.Both data and clock lines are pulled up with 10 kohm resistors to 3.3V.Sch_eeprom.emfFigure 7 External EEPROM schematic2.6Power Board ConnectorThe XMC4200 Digital Power Control Card provides a power board connector with a set of signals that can be extensively used in power supply applications, from server power supplies to UPS or lighting power supplies. Signals available in the connector are:∙8 PWM signals∙8 ADC analog inputs∙ 3 comparator inputs∙ 2 Serial channels∙ 4 general purpose pinsSch_Power_Board_Connector.emfFigure 8 Control card power connector schematicAttention: The power board connector is also providing the power supply for the power GND supply domain. Hence it may carry hazardous voltages.As it can be seen in Figure 8, each signal entering XMC4200 Digital Power Control Card from the power board connector is additionally protected by a bidirectional n ESD protection from Infineon.XMC4200 has internal ESD protection in each pin, however, given the general purpose characteristic of this control card, additional ESD protection is required to protect from very noisy power board environment that could eventually damage the control card or the microcontroller in it.The pin out of the connector is described in detail in Table 3.Table 3Power board connector pin outPin number Signal Name Port inXMC4200PeripheralfunctionNoteGND - Digital GNDGiven the flexible pin out in XMC4200, the functions above can be modified with SW configurations. In Figure 9, the PWM options are depicted. The pin out is done to fully cover High Resolution PWM (HRPWM) outputs. However, combinations of CCU8 and HRPWM are possible.Several topologies in power supplies can be controlled with that pin out including LLC with synchronous rectification, multi-phase buck/boost converters, PFC stages and much more.Figure 9 PWM output options- top, using CCU8 - bottom using only HRPWMAdditionally to the pins in the power board connector, the microcontroller has pins connected internally. Those are described in Table 32.7Analog to Digital Converter (ADC) inputs filterAll ADC inputs in the control card are filtered with a high frequency cross-over frequency RC filter, as shown in Figure 10. This will help to remove undesired high frequency noise from the input signals, and therefore, will improve the measurement performance of the microcontrollerSch_ADC_filter.emfFigure 10 ADC input RC filter schematicWith respect to the analog signals routed into XMC4200 ADC, a special plane is in place for increasing signal integrity and best signal noise ratio. In Figure 11can be seen that VAGND plane has been layouted around all ADC signals in all 4 layers of the PCB.Sch_ADC_signal_layout_XMC4200.emfFigure 11 ADC grounding layout detailBoth GND and AGND are connected together in a single point through a ferrite bead.3Production Data3.1SchematicsThis chapter contains the schematics for XMC4200 Digital Power Control CardThe board has been designed with Eagle. The full PCB design data of this board can also be downloadedSch_XMC42_0.emfFigure 12 Schematic page 0: coverSch_XMC42_1.emf Figure 13 Schematic page1: MCUSch_XMC42_2.emf Figure 14 Schematic page 2: connectorSch_XMC42_3.emf Figure 15 Schematic page 3: JLink &UART3.2Component PlacementIn Figure 16 the placement of some components is shown in a layout snapshot of the top layer of XMC4200 Digital Power Control CardLay_XMC42.emf Figure 16 Layout top level view of XMC4200 Digital Power Control Card3.3Bill Material (BOM)This board has been done in collaboration with Würth Elektronik. In Figure 17, the different components in the board are shown. In Table 5 a complete bill of material is given.Board_Components_XMC42.emfXMC4200 MicrocontrollerLDO IFX54441LDVCeramic capacitorsFerrite beadInductor USB connectorto PC Debugger controller – XMC4200Power supply: IFX90121ELV50LDO IFX54441LDVFerrite beadIFX ESD protectionsCeramic capacitorsInfineon Component Würth Elektronik ComponentFigure 17 Components from Infineon and Würth Elektronik4Revision HistoryCurrent Version is V1.0, 2015-10Board User Manual 21 V1.0, 2015-10Customer DocumentationPublished by Infineon Technologies AG 81726 München, Germany © 2015 Infineon Technologies AG. All Rights Reserved. Do you have a question about this document? Email: ******************** Document reference IMPORTANT NOTICE The information given in this document shall in no event be regarded as a guarantee of conditions or characteristics (“Beschaffenheitsgarantie”) . With respect to any examples, hints or any typical values stated herein and/or any information regarding the application of the product, Infineon Technologies hereby disclaims any and all warranties and liabilities of any kind, including without limitation warranties of non-infringement of intellectual property rights of any third party. In addition, any information given in this document is subject to customer’s compliance with its obligations stated in this document and any applicable legal requirements, norms and standards concerning customer’s products and any use of the product of Infineon Technologies in customer’s applications.For further information on the product, technology, delivery terms and conditions and prices please contact your nearest Infineon Technologies office ( ). WARNINGS Due to technical requirements products may contain dangerous substances. For information on the types in question please contact your nearest Infineon Technologies office. Except as otherwise explicitly approved by Infineon Technologies in a written document signed by authorized representatives of Infineon Technologies, Infineon Technologies’ products may not be used in any applications where a failure of the product or any consequences of the use thereof can reasonably be expected to result in personal injury.Trademarks of Infineon Technologies AG µHVIC™, µIPM™, µPFC™, AU -ConvertIR™, AURIX™, C166™, CanPAK™, CIPOS™, CIPURSE™, CoolDP™, CoolGaN™, COOLiR™, CoolMOS™, CoolSET™, CoolSiC™, DAVE™, DI -POL™, DirectFET™, DrBlade™, EasyPIM™, EconoBRIDGE™, EconoDUAL™, EconoPACK™, EconoPIM™, EiceDRIVER™, eupec™, FCOS™, GaNpowIR™, HEXFET™, HITFET™, HybridPACK™, iMOTION™, IRAM™, ISOFACE™, IsoPACK™, LEDrivIR™, LITIX™, MIPAQ™, ModSTACK™, my -d™, NovalithIC™, OPTIGA™, OptiMOS™, ORIGA™, PowIRaudio™, PowIRStage™, PrimePACK™, PrimeSTACK™, PROFET™, PRO -SIL™, RASIC™, REAL3™, SmartLEWIS™, SOLID FLASH™, SPOC™, StrongIRFET™, SupIRBuck™, TEMPFET™, TRENCHSTOP™, TriCore™, UHVIC™, XHP™, XMC™Trademarks updated November 2015Other Trademarks All referenced product or service names and trademarks are the property of their respective owners.Edition 2015-10UG_201511_PL30_003。
XMC1300 Boot Kit用户手册说明书
XMC1300 Boot KitPart Number: KIT_XMC13_BOOT_001Features∙XMC1300 Microcontroller with 200KB Flash∙Detachable SEGGER J-Link∙Motor control timer∙MATH co-processor∙Motor position interface∙Digital power conversionPLEASE SEE THE FOLLOWING PAGES FOR USERS MANUALXMC1300 CPU Card For XMC1000 FamilyCPU-13A-V1XMC1300 CPU CardBoard User's Manual Revision 2.0, 2013-12-18Edition 2013-12-18Published byInfineon Technologies AG81726 Munich, Germany© 2013 Infineon Technologies AGAll Rights Reserved.Legal DisclaimerThe information given in this document shall in no event be regarded as a guarantee of conditions or characteristics. With respect to any examples or hints given herein, any typical values stated herein and/or any information regarding the application of the device, Infineon Technologies hereby disclaims any and all warranties and liabilities of any kind, including without limitation, warranties of non-infringement of intellectual property rights of any third party.InformationFor further information on technology, delivery terms and conditions and prices, please contact the nearest Infineon Technologies Office ().WarningsDue to technical requirements, components may contain dangerous substances. For information on the types in question, please contact the nearest Infineon Technologies Office.Infineon Technologies components may be used in life-support devices or systems only with the express written approval of Infineon Technologies, if a failure of such components can reasonably be expected to cause the failure of that life-support device or system or to affect the safety or effectiveness of that device or system. Life support devices or systems are intended to be implanted in the human body or to support and/or maintain and sustain and/or protect human life. If they fail, it is reasonable to assume that the health of the user or otherTrademarks of Infineon Technologies AGAURIX™, C166™, CanPAK™, CIPOS™, CIPURSE™, EconoPACK™, CoolMOS™, CoolSET™, CORECONTROL™, CROSSAVE™, DAVE™, DI-POL™, EasyPIM™, EconoBRIDGE™, EconoDUAL™, EconoPIM™,EconoPACK™,EiceDRIVER™, eupec™, FCOS™, HITFET™, HybridPACK™, I²RF™, ISOFACE™, IsoPACK™, MIPAQ™, ModSTACK™,my-d™, NovalithIC™, OptiMOS™, ORIGA™, POWERCODE™, PRIMARION™, PrimePACK™, PrimeSTACK™, PRO-SIL™, PROFET™, RASIC™, ReverSave™, SatRIC™, SIEGET™, SINDRION™, SIPMOS™, SmartLEWIS™, SOLID FLASH™, TEMPFET™, thinQ!™, TRENCHSTOP™, TriCore™.Other TrademarksAdvance Design System™ (ADS) of Agilent Technologies, AMBA™, ARM™, MULTI-ICE™, KEIL™, PRIMECELL™, REALVIEW™, THUMB™, µVision™ of ARM Limited, UK. AUTOSAR™ is licensed by AUTOSAR development partnership. Bluetooth™ of Bluetooth SIG Inc. CAT-iq™ of D ECT Forum. COLOSSUS™, FirstGPS™ of Trimble Navigation Ltd. EMV™ of EMVCo, LLC (Visa Holdings Inc.). EPCOS™ of Epcos AG. FLEXGO™ of Microsoft Corporation. FlexRay™ is licensed by FlexRay Consortium. HYPERTERMINAL™ of Hilgraeve Incorporated. IEC™ of Commission Electrotechnique Internationale. IrDA™ of Infrared Data Association Corporation. ISO™ of INTERNATIONAL ORGANIZATION FOR STANDARDIZATION. MATLAB™ of MathWorks, Inc. MAXIM™ of Maxim Integrated Products, Inc. MICROTEC™, NUCLEUS™ of Mentor Graphics Corporation. MIPI™ of MIPI Alliance, Inc. MIPS™ of MIPS Technologies, Inc., USA. muRata™ of MURATA MANUFACTURING CO., MICROWAVE OFFICE™ (MWO) of Applied Wave Research Inc., OmniVision™ of OmniVision Technologies, Inc. Openwave™ Openwave Systems Inc. RED HAT™ Red Hat, Inc. RFMD™ RF Micro Devices, Inc. SIRIUS™ of Sirius Satellite Radio Inc. SOLARIS™ of Sun Microsystems, Inc. SPANSION™ of Spansion LLC Ltd. Symbian™ of Symbian Software Limited. TAIYO YUDEN™ of Taiyo Yuden Co. TEAKLITE™ of CEVA, Inc. TEKTRONIX™ of Tektr onix Inc. TOKO™ of TOKO KABUSHIKI KAISHA TA. UNIX™ of X/Open Company Limited. VERILOG™, PALLADIUM™ of Cadence Design Systems, Inc. VLYNQ™ of Texas Instruments Incorporated. VXWORKS™, WIND RIVER™ of WIND RIVER SYSTEMS, INC. ZETEX™ of Diodes Zetex Limited.Last Trademarks Update 2011-11-11Table of Contents1Overview (7)1.1Key Features (7)1.2Block Diagram (7)2Hardware Description (8)2.1Power Supply (8)2.2Reset (9)2.3Clock Generation (9)2.4Boot Option (9)2.5Debug Interface and virtual com port (9)2.6LED (9)2.7Potentiometer (10)2.8Application Card connector (10)3Production Data (12)3.1Schematics (12)3.2Layout and Geometry (15)3.3Bill of Material (15)List of FiguresFigure 1Block Diagram of XMC1300 CPU Card (7)Figure 2XMC1300 CPU Card (8)Figure 3Power Supply circuit (8)Figure 4LEDs circuit (10)Figure 5Potentiometer Circuit (10)Figure 6Pinout of the 2x30 pin edge connector (11)Figure 7Schematic 1 of 2 XMC1300 CPU Card (13)Figure 8Schematic 2 of 2 XMC1300 CPU Card (14)Figure 9XMC1300 CPU Card layout and geometry (15)List of TablesTable 1Debug connector X201 (9)Table 2LEDs Pinout (10)Table 3XMC1300 CPU Card (15)IntroductionThis document describes the features and hardware details of the XMC1300 CPU Card. This board is mounted with ARM® Cortex TM-M0 based XMC1300 Microcontroller from Infineon Technologies AG. This board is part of Infineon’s XMC1000 Application Kits1 OverviewThe XMC1300 CPU board (CPU-13A-V1) houses the XMC1300 Microcontroller and a 2x30 pin edge for application expansion. The board along with application cards (e.g. Colour LED Card, White LED Card) demonstrates the capabilities of XMC1300. The main use case for this board is to demonstrate the generic features of XMC1300 device including tool chain. The focus is safe operation under evaluation conditions. The board is neither cost nor size optimized and does not serve as a reference design.1.1 Key FeaturesThe XMC1300 CPU Card is equipped with the following features∙XMC1300 (ARM®Cortex TM-M0 based) Microcontroller, TSSOP38∙Connection to XMC1300 application cards via card edge connector∙Detachable J-Link debugger and UART virtual COM port, with micro USB connector∙Six user LEDs∙Potentiometer, connected to analog input P2.5∙Power supply via Micro-USB connector1.2 Block DiagramFigure 1 shows the functional block diagram of the XMC1300 CPU Card.Features include:−On board Debugger, for downloading and debugging of application code−Virtual com port for uart communication with terminal program e.g. Hyperterminal.−2x30 card edge connector, for extension to application card e.g. Colour LED Card and White LED Card.− 6 User LEDs connected to GPIO P0.0, P0.1, P0.6, P0.7, P0.8 and P0.9−Variable resistor R110 connected to Analog input P2.5−All the pins of XMC1300 are accessible via the connector JP101, JP102, JP103 and JP104Figure 1 Block Diagram of XMC1300 CPU Card2 Hardware DescriptionThe following sections give a detailed description of the hardware and how it can be used.Figure 2 XMC1300 CPU Card2.1 Power SupplyXMC1300 CPU Card is powered from the micro USB connector (5V); however, there is a current limit that can be drawn from the host PC through USB. If the CPU-13A-V1 board is used to drive other application board (e.g. Colour LED Card, White LED Card) and the total current required exceeds 500mA, then the board needs to be powered by external power supply connected to VDD and GND connection on board.The XMC1300 device can operate by power supply of 1.8V till 5.5Vdc. On this board, 5Vdc is used to power the XMC1300 device. However, if user wants to power the XMC1300 device with 3.3Vdc, then, set Jumper at JP201 to 3.3V side.Figure 3 Power Supply circuit2.2 ResetXMC1300 does not have a reset pin, hence, user can unplug and replug the USB cable to achieve power-on master reset.2.3 Clock GenerationNo external clock source is required. XMC1300 has two internal oscillators DCO1 and DCO2. DCO1 has a clock output of 64MHz. DCO2 is used to generate the standby clock running at 32.768KHz which used for Real Time Clock too. The main clock, MCLK and fast peripherial clock, PCLK, are generated from DCO1’s output.2.4 Boot OptionAfter power-on reset with master reset, XMC1300 device will enter different boot mode depend on the BMI (Boot Mode Index) value stored in XMC1300’s f lash configuration sector 0 (CS0). The BMI value pre-programmed on the XMC1300 device on CPU Card is User mode with debug enabled, hence, the XMC1300 device will start to run the application code in its embedded Flash after power on reset.2.5 Debug Interface and virtual com portXMC1300 CPU Card has on-board debugger which supports Serial Wire Debug (SWD) and Single Pin Debug (SPD) as debug interface. SPD is a proprietary debugging protocol from Infineon Technologies and it requires only 1 pin for debug communication. The debugger also provides a virtual COM port which support UART communication via P1.3 (rx-in) and P1.2 (tx-out) of XMC1300. There is a 2x5 pins Header Debug connector X201.Table 1 Debug connector X2012.6 LEDThe port pins P0.0, P0.1, P0.6, P0.7, P0.8 and P0.9 are connected to LED101, LED102, LED103, LED104, LED105 and LED106 respectively. The LED is turn on by output ‘L ow’ at the port pin.Figure 4 LEDs circuit2.7 PotentiometerXMC1300 CPU Card provides a potentiometer R110 for ease of use and testing of the on-chip analog to digital converter. The potentiometer is connected to the analog input P2.5. The analog output of the potentiometer is the same the VDDP voltage supplied to the XMC1300 device.Figure 5 Potentiometer Circuit2.8 Application Card connectorXMC1300 CPU Card has a 2x30 pins card edge connector. The mating connector is SAMTEC HSEC8-130-01-L-RA-XX.Figure 6 Pinout of the 2x30 pin edge connector3 Production Data3.1 SchematicsThis chapter contains the schematics for the XMC1300 CPU Card:∙Figure 7: CPU, Pin Headers, Potentiometer and LED and 60pin Edge connector ∙Figure 8: On-board Debugger, Power Supply3.2 Layout and GeometryFigure 9 XMC1300 CPU Card layout and geometry 3.3 Bill of Materialw w w.i n f i n e o n.c o m。
XMC4000中文参考手册-第12章LED和触摸感应(LEDTS)

12 LED和触摸感应(LEDTS)LED和触摸感应模块(LEDTS)在需要人机接口(HMI)的应用中用作驱动LED和控制触摸焊盘。
表12-1 缩写LEDTS LED和触摸感应TSD时间片持续时间TFD时间帧持续时间TPD时间周期持续时间12.1 概述LEDTS使用张弛振荡器(RO)结构可测量高达8个触摸焊盘。
触摸焊盘电容的测量原理是:在一个固定的时间周期内在触摸焊盘上产生振荡信号并对该信号脉冲计数。
服务请求处理模块还可驱动以矩阵形式连接的最多64 个LED。
触摸焊盘和LED 可以共享引脚,使该类应用所需要的引脚数最少。
这种共享引脚的配置是通过让模块以分时复用的方式控制触摸焊盘和驱动LED 来实现的。
LED 矩阵中的LED 是按行和列来组织的。
每一行都可为最多8 个LED 和一个触摸焊盘所共享。
有些功能,如列启用、功能选择和控制,是由硬件控制的。
LED 行数据的更新和触摸焊盘测量结果的计算需要由软件来实现。
12.1.1 特性对于LED驱动功能,LEDTS提供以下特性:•高达8 个可选LED 列;如果还启用触摸感应功能,则可选高达7 个LED列•可配置LED列的有效时间,以此来控制LED亮度•每列可驱动高达8个LED,兼容共阴极或者共阳极•在LED列时间片内完成行模式映射激活;LED 行模式更新与列激活同步•对所选择事件可配置的中断启用•行和列引脚由 PORTS SFR的设置来控制对与触摸感应功能,LEDTS提供以下功能:•高达8触摸感应的输入行•在任何时间只能测量一个触摸焊盘;有效板的选择可由软件控制,也可由硬件循环控制•灵活测量的触摸焊盘测量时间•带振荡调节功能的引脚振荡控制电路•16位计数器:用于对引脚上的振荡脉冲计数•所选择事件的可配置中断启用•对有效触摸输入行(引脚)的引脚支配控制注:该章提及LED或者触摸感应引脚,比如,‘引脚COL[x]’,‘引脚TSIN[x]’。
在所有例子中,它参考选择LED/触摸感应功能的用户配置引脚(s)。
XMC4000中文参考手册-第21章 数模转换器(DAC)

&
DAC_CLOCK
图 21-4
数据输出级框图
参考手册 DAC V2.3.1
21-5
V1.2, 2012-12 请遵守产品信息使用协议
Device Guide XMC4500 XMC4000 家族
数模转换器(DAC)
数据输出级是 DAC 数据路径中数据转化为模拟量之前最后一个元素。它包括一个多路复用器、 加法器、乘法器、输出寄存器和 DAC 时钟输出的产生。 多路复用器在五个可用的数据源之间进行选择并用模式参数编程。相加级给出添加一个 8 位偏 移值的可能性。该偏移值主要为了满足 PG 模式的需求,以便处理未注明的信号模式到 DACs。 在这种情况下,某些特定的偏移值可以添加到信号输出模式的值中。乘法器通过简单的二进制 数值转换实现缩放比例。因此它允许编程 2n 刻度值的乘法和除法。在所有功能操作模式中偏 移和缩放操作是可能的。输出寄存器包含与相应触发器一起传递到模拟转换器的最终样本。 使用 DAC 的触发发生器(TG)产生 DAC 模拟部分操作的输出时钟。用于这一目的的 TG 触 发器输出延时了 4 个系统时钟周期并拉伸到 8 个系统时钟周期长度。 21.2.1.4 测试图案信号发生器(PG)--波形发生器
21.1.2
图 21-1
包含 Digdac 子模块的 DAC 模块方框图
参考手册 DAC V2.3.1
21-2
V1.2, 2012-12 请遵守产品信息使用协议
Device Guide XMC4500 XMC4000 家族
数模转换器(DAC)
21.2
操作模式
以下章节描述所有 DAC 的功能操作模块和如何使用它们。本章所有使用的配置参数是 21.6 节 所描述寄存器的一部分。 21.2.1 硬件特点
XMC4000中文参考手册-第20章 Δ-Σ解调器(DSD)
每一个转换通道可以独立运行,由一组专用的寄存器控制。每一个通道的转换结果可以储存在 专用的通道特定结果寄存器。 被选择的调制器信号通过片上滤波环节产生数字结果。 DSD 可以接受来自不同类型的外部调制器的数据。这些数据流可被送到可选择的输入引脚中。 特点 下面的特点描述了 Δ-Σ 转换器的功能。
连接外部标准的 Δ-Σ 调制器的选项 − 可选的数据流输入 − 可选的 Δ-Σ 时钟输入或输出
参考手册 DSD, V1.4
20-4
V1.2, 2012-12 请遵守产品信息使用协议
Device Guide XMC4500 XMC4000 家族
Δ-Σ 解调器(DSD)
抽取因子 4...32:1 数字 输入
输 入 选 择 调 整
数 辅助CIC 据 滤波器 移 位
比较器
数字 结果 服务 请求
抽取因子 4...256:1
连接外部标准的调制器的选项可选的时钟输入或输出主解调器级联的硬件滤波环节deviceguidexmc4500xmc4000家族解调器dsd参考手册202v12201212dsdv14请遵守产品信息使用协议用于旋转变压器的载波信号发生器表202dsd模块应用dsd应用实例应用领域解耦的相电流检测电机控制能量转换旋变信号的解算和励磁信号的生成电机控制对于宽动态范围输入信号的可变分辨率调节电机控制测量医疗deviceguidexmc4500xmc4000家族解调器dsd参考手册203v12201212dsdv14请遵守产品信息使用协议图201dsd模块结概览deviceguidexmc4500xmc4000家族解调器dsd参考手册204v12201212dsdv14请遵守产品信息使用协议202简介和基本结构xmc4500模数转换模块提供若干个滤波器抽取率可配置的主解调器和辅助解调器的通道见图202
XMC4000中文参考手册-第01章 XMC4500简介
简介1 简介XMC4500系列属于工业微控制器XMC4000家族,该系列以ARM Cortex-M4核心处理器为基础。
优化的XMC4000系列器件用于电机控制、功率变换、工业连接和检测及控制应用。
如今高效节能的嵌入式控制应用变得更加复杂,需要微处理器具有DSP(数字信号处理)特性和FPU(浮点运算单元)能力的更高性能的CPU内核,以及对集成外设的性能进行优化的解决方案。
XMC4500微控制器系列利用了英飞凌公司在微控制器设计领域数十年的经验,同时辅以可以缩短产品生产时间,提高生产效率的环境,提出了一种优化的设计方案,足以应对如今嵌入式控制应用对性能的挑战。
1.1 概述XMC4500系列器件结合了ARM Cortex-M4内核的扩展功能和性能以及功能强大的片上外设子系统和片上存储单元。
以下是XMC4500系列器件的主要特点:CPU子系统•CPU内核−高性能的32位ARM Cortex-M4 CPU−16位和32位Thumb2指令集−DSP/MAC指令−用于支持操作系统的系统定时器(SysTick)•浮点单元•储存器保护单元•嵌套向量中断控制器•两个多达12通道的通用DMA•用于内部与外部的服务请求可编程处理的事件请求单元(ERU)•用于多比特错误检测的灵活的CRC引擎(FCE)片上存储器•16KB片上启动ROM•64KB片上高速程序存储器•64KB片上高速数据存储器•32KB片上高速通信•带有4KB指令缓存的1024KB片上闪存简介通信外设•以太网MAC模块,能够容纳10/100 MB/s的传输速率•通用串行总线,USB2.0主机,全速OTG,带有集成PHY•控制器局域网接口(MultiCAN),具有三节,64个消息对象,数据速率最高可达1 MB/s 的 Full-CAN/Basic-CAN•6个通用串行接口通道(USIC),可用作通用异步收发传输器(UART),双线与四线串行外设接口(SPI),IIC, IIS 与 LIN接口•用于人机交互的LED灯和触摸感应控制器(LEDTS)•用于储存数据的SD和多媒体卡接口(SDMMC)•外部总线接口单元(EBU)启用与外部储存设备以及片外外设通信,如SRAM,SDRAM,NOR,NAND和突发模式闪存。
XMC4000中文参考手册-第13章 SD MMC 接口(SDMMC)

参考手册 SDMMC,V1.5
13-5
V1.2, 2012-12 请遵守产品信息使用协议
Device Guide XMC4500 XMC4000 家族
SD/MMC 接口(SDMMC)
13.3
卡检测
当 检测 到 卡在 窄 槽内 插 入或移 出 时 , 状 态 会通过中 断方法 发送 给 CPU 。 低电平 卡 信 号 SDCD_n 在卡检测期间设置为 0。SDMMC_PRESENT_STATE.CARD_INSERTED 位表明卡 是 否 已 经 插 入 。 从 0 变 到 1 生 成 了 在 正 常 中 断 状 态 寄 存 器 SDMMC_INT_STATUS_NORM.CARD_INS=1 中的卡插入中断,并且从 1 变到 0 生成了在正 常中断状态寄存器 SDMMC_INT_STATUS_NORM.CARD_REMOVAL=1 中的卡移出中断。
Device Guide XMC4500 XMC4000 家族
SD/MMC 接口(SDMMC)
13
SD/MMC 接口(SDMMC)
本章描述了 SD/MMC 模块。XMC4500 使用以下 SD 和 MMC 卡标准规范。获取有关如何操作 SDMMC 界面的更多详细信息,请参考下面的 SD 和 MMC 参考规范。 参考 [10] SD 规格部分 A2,SD 主控制器标准规范,版本 2.00,2007 年 2 月 https:///developers/overview/host_controller/simple_spec [11] SD 规格部分 1,物理层规范,版本 2.00,2006 年 5 月 https:///downloads/pls [12] SD 规格部分 E1,SDIO 规范,版本 2.00,2007 年 1 月 https:///developers/overview/sdio/sdio_spec [13] SD 存储卡安全规范,版本 1.01 [14] 多媒体卡系统规范,版本 3.31,4.2 和 4.4 13.1 概述
XMC4000中文参考手册-第04章 服务请求处理

4-7
V1.2, 2012-12 请遵守产品信息使用协议
XMC4500 XMC4000 家族
服务请求处理
图 4-3
DMA 线处理程序
对于每个 DMA 线,用户可以从 DMA 超强的 XMC4500 服务请求源的子集中指定一个服务请求 源。其分配是通过编程寄存器 DLR_SRSELx 的 SRSx 位字段来实现的。DLR 的 0—7 号线连 接到了 GPDMA0,而 8—11 号线连接到了 GPDMA1。 如果选定的服务请求脉冲发生,且根据线可以由寄存器 DLR_LNEN 使用,那么 DMA 处理程 序将请求转发并储存,直到 GPDMA 应答信号。当一个请求脉冲发生时,若另一个正在传输中, 则该请求会被忽略,对应的溢出状态位在寄存器 DLR_OVRSTAT 中置位。 一旦溢出发生,用户可以通过写寄存器 DLR_OVRCLR 来清除溢出状态位。此外,通过先后禁 用和启用相应线,待处理的请求必须重新设置。
IRQ 编号 22...25 26...29 30...33 34...37 38...41 42,43 44...47 48...51 52...55 56...59 60...63 64...67 68...69 70...71 72...75 76...83 84...89
描述 模数转换器组 1 模数转换器组 2 模数转换器组 3 Delta-Sigma 主解调器 Delta-Sigma 辅助解调器 数模转换器 捕获比较单元 4(模块 0) 捕获比较单元 4(模块 1) 捕获比较单元 4(模块 2) 捕获比较单元 4(模块 3) 捕获比较单元 8(模块 0) 捕获比较单元 8(模块 1) 位置接口(模块 0) 位置接口(模块 1) 保留 MuliCAN 模块 通用串行接口通道(模块 0)
AT32 MCU XMC入门指南说明书

AN0106应用笔记AT32 MCU XMC入门指南前言XMC是一个将AHB传输信号与外部存储器信号相互转换的外设。
支持的外部存储器有静态随机存储器SRAM、NOR FLASH、PSRAM、NAND FLASH、PC卡和同步动态随机存储器SDRAM。
另外,XMC接口还可以用于驱动LCD屏。
本文介绍了XMC外设功能,以及上述几种存储器和LCD的驱动方式和相关代码。
注:本应用笔记对应的代码是基于雅特力提供的V2.x.x 板级支持包(BSP)而开发,对于其他版本BSP,需要注意使用上的区别。
支持型号AT32F403xx AT32F403Axx AT32F407xx AT32F435xx AT32F437xx目录1XMC概述 (7)2XMC结构 (8)2.1XMC框图 (8)2.2XMC地址映射 (8)2.3XMC操作宽度 (10)3XMC功能 (11)3.1SRAM/NOR/PSRAM界面 (11)引脚定义 (11)SRAM/NOR/PSRAM存储器介绍 (11)读/写时序及控制寄存器配置 (14)3.2NAND FLASH界面 (29)引脚定义 (29)读/写时序 (30)NAND FLASH存储器介绍 (30)ECC功能 (34)常规空间和特殊空间 (35)3.3PC卡界面 (35)引脚定义 (35)PC卡/CF卡结构介绍 (36)PC 卡读/写时序 (36)通用空间/属性空间和IO空间 (37)3.4驱动LCD屏 (37)8bit LCD屏驱动 (37)16bit LCD触摸屏驱动 (39)3.5地址映射和交换 (40)4XMC应用案例 (41)4.1案例1 SRAM异步非复用读写 (41)功能简介 (41)资源准备 (41)软件设计 (41)4.2案例2 PSRAM异步复用读写 (44)功能简介 (44)资源准备 (44)软件设计 (45)4.3案例3 NOR FLASH异步非复用读写 (48)功能简介 (48)资源准备 (48)软件设计 (48)4.4案例4 NAND FLASH读写 (52)功能简介 (52)资源准备 (52)软件设计 (53)4.5案例5 NAND FLASH ECC纠错 (58)功能简介 (58)资源准备 (58)软件设计 (59)4.6案例6 8bit LCD屏驱动 (65)功能简介 (65)资源准备 (65)软件设计 (65)4.7案例7 16bit LCD触摸屏驱动 (70)功能简介 (70)资源准备 (70)软件设计 (70)5文档版本历史 (77)表1 XMC操作宽度 (10)表2 SRAM/NOR/PSRAM引脚定义 (11)表3 SRAM/NOR/PSRAM界面时序种类 (14)表4 mode1控制寄存器配置 (15)表5 mode1时序寄存器配置 (16)表6 mode2控制寄存器配置 (17)表7 mode2时序寄存器配置 (17)表8 modeA控制寄存器配置 (18)表9 modeA时序寄存器/写时序寄存器配置 (19)表10 modeB控制寄存器配置 (20)表11 modeB时序寄存器/写时序寄存器配置 (20)表12 modeC控制寄存器配置 (21)表13 modeC时序寄存器/写时序寄存器配置 (22)表14 modeD控制寄存器配置 (23)表15 modeD时序寄存器/写时序寄存器配置 (24)表16 异步复用模式控制寄存器配置 (25)表17 异步复用模式时序寄存器/写时序寄存器配置 (26)表18 异步复用模式额外时序寄存器配置 (26)表19 同步复用模式控制寄存器配置 (28)表20 同步复用模式时序寄存器/写时序寄存器配置 (28)表21 NAND引脚定义 (29)表22 mode1时序寄存器配置 (30)表23 ECC有效位数 (34)表24 PC卡引脚定义 (35)表25 PC Card时序寄存器配置 (37)表26 8bit LCD引脚定义 (38)表27 16bit LCD引脚定义 (39)表28 SWAP_XMC地址交换示意 (40)表29文档版本历史 (77)图1 XMC框图 (8)图2 AT32F435/437 XMC地址映射 (9)图3 IS62WV51216框图 (11)图4 W957D6HB框图 (12)图5 W957D6HB时序要求 (12)图6 M29W128存储结构 (13)图7 M29W128常用命令 (14)图8 mode1读时序 (15)图9 mode1写时序 (15)图10 mode2读时序 (16)图11 mode2写时序 (17)图12 modeA读时序 (18)图13 modeA写时序 (18)图14 modeB读时序 (19)图15 modeB写时序 (20)图16 modeC读时序 (21)图17 modeC写时序 (21)图18 modeD读时序 (23)图19 modeD写时序 (23)图20 异步复用读时序 (25)图21 异步复用写时序 (25)图22 同步复用读时序 (27)图23 同步复用写时序 (27)图24 NAND FLASH读/写时序 (30)图25 H27U1G8F2CTR存储结构 (31)图26 H27U1G8F2CTR地址周期 (31)图27 H27U1G8F2CTR读/写命令 (32)图28 H27U1G8F2CTR读操作时序 (32)图29 H27U1G8F2CTR 擦除操作时序 (33)图30 H27U1G8F2CTR 写操作时序 (34)图31 AT32F435/437 NAND bank2地址映射 (35)图32 PC卡/CF卡框图 (36)图33 PC Card读/写时序 (36)图34 AT32F435/437 PC卡地址映射 (37)图35 LCD命令(以刷屏方向配置为例) (38)图36 LCD显示示意 (39)图37 切换NAND FLASH型号 (52)图38切换NAND FLASH型号 (58)1 XMC概述1)SRAM/NOR FLASH/PSRAM界面:⏹支持4个外部存储器的片选信号,拥有各自的控制寄存器;⏹支持的存储器件包括:--SRAM--NOR FLASH--PSRAM⏹支持8位与16位数据宽度存储器;⏹提供多种时序模式选择:--读写相同时序的2种模式(模式1、模式2)--读写不同时序的4种模式(模式A、模式B、模式C、模式D)--地址数据线复用的模式(复用模式)--有时钟的同步模式(同步模式)⏹具可编程的时序控制寄存器;⏹支持硬件自动将AHB数据宽度转换为外部存储器适用的数据宽度;⏹支持驱动部分型号的LCD屏。
XMC1xxx SWD 在线编程参考指南

ApplicationNote AN05220083 V1.00 Date: 2014/08/18 XMC1xxx SWD 在线编程参考指南类 别内 容 关键词 Infineon,XMC1xxx,AK100,SWD,在线编程,编程器主要特点 1.独有的1拖4(甚至1拖16)量产高速在线编程; 2.支持灵活的序列号烧写; 3.支持工程加密,保障固件安全; 4.支持一键添加多个文件烧写; 5.自由的组合定制操作,允许定制任意操作序列; 6.全自动上下电量产检测,无需操作软件,大幅提升烧写效率。
摘 要 本文主要介绍AK100Pro-4P 如何通过SWD 对Infineon 的XMC1xxx 系列芯片进行在线编程广州致远电子股份有限公司目录1. XMC1xxx简介 (1)2. AK100Pro简介 (2)3. 准备条件 (4)3.1准备XMC1100-T038F-0064AA目标板 (4)3.2安装KFlashPro软件 (4)3.3连接XMC1100-T038F-0064AA目标板至AK100Pro-4P (5)4. 基本烧写 (7)4.1创建工程 (7)4.2参数配置 (7)4.2.1硬件选择 (7)4.2.2主要设置 (8)4.2.3附加设置 (9)4.2.4程序烧写 (9)4.3烧写配置 (10)4.4进行烧写 (11)5. 高级烧写 (12)5.1量产烧写配置 (13)5.2加密与解密 (14)5.2.1加密 (14)5.2.2解密 (15)6. 技术支持 (16)7. 订购信息 (17)1. XMC1xxx简介XMC1xxx 系列是Infineon公司推出的一款基于ARM Cortex-M0内核的超低功耗微控制器,采用了65nm制造工艺。
其中,XMC1300系列针对电机控制、电源转换和LED照明应用而优化设计;XMC1200系列针对LED照明应用和人机接口而优化设计;XMC1100系列针对入门级市场而设计。
穿流量减噪器XMC系列说明书

= “Most Popular”
Specifications
XMC-04-000 XMC-08-000 XMC-0B-000
Air Flow @12 PSIG 65 SCFM 110 SCFM 200 SCFM
Байду номын сангаас
(0,8 bar)
(30.7 dm3/s) (51.9 dm3/s) (94.4 dm3/s)
Catalog 9EM-TK-190-1
Exhaust Silencer Mist Eliminator XMC
Exhaust Silencer / Mist Eliminator XMC
The XMC Series High Performance Exhaust Silencer / Mist Eliminator is an efficient solution to exhaust air oil mist contamination and excessive noise levels generated by exhaust air at levels generally above acceptable safety standards. The Wilkerson XMC Series Exhaust Silencer / Mist Eliminator solves the following two problems:
60 1.2
1.0 15 0.8
XMC-04-000 XMC-08-000
XMC-0B-000
50 0
50
100
150
200
250
SCFM
10 0.6
0 10 20 30 40 50 60 70 80 90 100 110 120
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1、域属性介绍一、一般属性∙名称:域的唯一标识∙域号码:主要用于区别出不同域之间端点设备的呼叫前缀,比如建立了一个北京域,给该域分设置的域号码为010,那么其它域的端点设备呼叫北京域的端点设备时所需要拨打的号码为010+线路号码;但是北京域内的各端点设备,只需要拨打线路号码即可,也就是说域内拨打时加不加域号码为可选项(注意:域号码只作用于域内线路节点,和域内中继网关、上级软交换无任何关联)∙域描述:概括性描述说明二、详细属性∙号码转换:域的号码转换只作用于不同域之间的呼叫时,也就是说如果呼叫的主叫方和被叫方为同一域时,域的号码转换是不起作用的。
∙前缀:号码转换的触发条件,当所拨打的被叫号码和前缀吻合时则触发号码转换(域的号码转换在同域内无效)。
比如前缀设置为0755T,表示当拨打的被叫号码为深圳的号码时触发执行号码转换;如果想设置拨打任何号码都进行号码转换,前缀设置为T即可。
∙减码、加码、追加码:减码是在号码转换中减去原码号码的前几位,加码的作用是在减码完成后的结果号码的开头插入一些号码数字,追加码的作用是在减码及加码都完成后,在结果号码的结尾处追加的号码数字。
∙全替换号码:全替换号码如果设置后,减码、加码、追加码的设置则无效。
全替换号码的作用是把原始号码强制替换为所需要的号码。
∙类型:号码替换的类型有主叫设备主叫号码变换、主叫设备被叫号码变换、被叫设备主叫号码变换、被叫设备被叫号码变换四种,主要作用是取决于域是作于主叫方还是被叫方,并进行主叫号码的替换还是被叫号码的替换。
∙呼叫前缀:呼叫前缀的作用主要用于该域内中继网关及上级软交换的有效前缀,只有在不同域间呼叫才启作用。
注意区别于域号码,域号码作用于域内线路呼叫,呼叫前缀作用于域内中继网关、上级软交换的呼叫。
2、域操作介绍一、新增域点击“域管理”--->“添加域”在名称编辑框中填写域的名称(必须唯一值),域号码编辑框填写分配给该域的域号码(必须唯一值),点击添加。
二、修改或删除域点击“域管理”--->“查询域”点击需要修改或删除域中相应的按钮完成域的修改或删除三、域的号码转换点击“域管理”--->“查询域”在需要进行号码转换设置的域中点击“详细配置”--->“号码转换”∙在名称处填写标识名称∙前缀填写匹配号码的前缀,T表示任何数字。
如:0755表示任何以0755开头的匹配号码,0表示任何以0开头的匹配号码,T表示匹配任何号码∙在匹配到号码后,如果需要去除号码前几位则在减码中填写对应的位数∙在匹配到号码后,如果需要在号码开头追加指定数字串则在加码中填写对应的数字串,注意该项的追加是在减码执行后执行∙在匹配到号码后,如果需要在号码结尾追加指定数字串则在追加码中填写对应的数字串∙如果不想进行任何减码、加码、追加码的设置,需要把号码全部替换为指定数字串,则在全替换号码中输入指定的数字串替换类型可以指定作用域为主叫域或被叫域时,如果匹配了被叫号码,则根据减码、加码、追加码或者全替换对选定的主叫或被叫号码进行替换例如:要实现当作用域为被叫域时,被叫号码匹配0755时,将主叫号码替换为010在前缀填写0755,在减码填写4,在加码填写010,全替换号码不写,类型选择被叫设备主叫号码变换四、呼叫前缀如果其它域用户需要呼入本域内中继网关或者本域内上级软交换节点,则进行呼叫前缀设置,该项设置与域内线路节点无关,呼叫前缀只作用于域内中继网关节点或域内上级软交换节点点击“域管理”--->“查询域”在需要进行呼叫前缀设置的域中点击“详细配置”--->“呼叫前缀”例如:允许0755开头的呼叫号码呼入,在前缀中填写0755;多个呼入前缀设置之间用逗号分隔,如前缀填写0,9则允许开头0或9的呼入前缀呼入本域1、端点属性介绍一、一般属性∙名称:端点设备的标题∙域名:端点设备所属域∙描述:概括性描述说明二、详细属性∙号码转换:域的号码转换只作用于不同域之间的呼叫时,也就是说如果呼叫的主叫方和被叫方为同一域时,域的号码转换是不起作用的。
∙前缀:号码转换的触发条件,当所拨打的被叫号码和前缀吻合时则触发号码转换(域的号码转换在同域内无效)。
比如前缀设置为0755T,表示当拨打的被叫号码为深圳的号码时触发执行号码转换;如果想设置拨打任何号码都进行号码转换,前缀设置为T即可。
∙减码、加码、追加码:减码是在号码转换中减去原码号码的前几位,加码的作用是在减码完成后的结果号码的开头插入一些号码数字,追加码的作用是在减码及加码都完成后,在结果号码的结尾处追加的号码数字。
∙全替换号码:全替换号码如果设置后,减码、加码、追加码的设置则无效。
全替换号码的作用是把原始号码强制替换为所需要的号码。
∙类型:号码替换的类型有主叫设备主叫号码变换、主叫设备被叫号码变换、被叫设备主叫号码变换、被叫设备被叫号码变换四种,主要作用是取决于域是作于主叫方还是被叫方,并进行主叫号码的替换还是被叫号码的替换。
∙呼叫限制:用于限制该端点设备禁止呼叫某些号码。
比如不想让用户拨打0755为区号的所有号码,在限制号码中填写0755T即可;如果只是不想让用户拨打07551860,那么在限制号码中填写07551860即可。
2、端点操作介绍一、添加端点设备点击“设备管理”--->“端点设备”--->“添加端点”在名称编辑框填写端点设备的名称,在域名的下拉列表中选择对应的所属域,点击插入二、修改或删除端点点击“设备管理”--->“端点设备”,选择端点的“所属域”后点击“查询端点”点击需要修改或删除端点中相应的按钮完成端点的修改或删除三、端点的号码转换点击“设备管理”--->“端点设备”,选择端点的“所属域”后点击“查询端点”在需要进行号码转换设置的端点设备中点击“详细配置”--->“号码转换”∙在名称处填写标识名称∙前缀填写匹配号码的前缀,T表示任何数字。
如:0755表示任何以0755开头的匹配号码,0表示任何以0开头的匹配号码,T表示匹配任何号码∙在匹配到号码后,如果需要去除号码前几位则在减码中填写对应的位数∙在匹配到号码后,如果需要在号码开头追加指定数字串则在加码中填写对应的数字串,注意该项的追加是在减码执行后执行∙在匹配到号码后,如果需要在号码结尾追加指定数字串则在追加码中填写对应的数字串∙如果不想进行任何减码、加码、追加码的设置,需要把号码全部替换为指定数字串,则在全替换号码中输入指定的数字串替换类型可以指定作用域为主叫域或被叫域时,如果匹配了被叫号码,则根据减码、加码、追加码或者全替换对选定的主叫或被叫号码进行替换∙类型:号码替换的类型有主叫设备主叫号码变换、主叫设备被叫号码变换、被叫设备主叫号码变换、被叫设备被叫号码变换四种,主要作用是取决于域是作于主叫方还是被叫方,并进行主叫号码的替换还是被叫号码的替换。
例如:要实现当作用端点为被叫设备时,被叫号码匹配0755时,将主叫号码替换为010在前缀填写0755,在减码填写4,在加码填写010,全替换号码不写,类型选择被叫设备主叫号码变换四、呼叫限制呼叫限制:用于限制该端点设备禁止呼叫某些号码。
比如不想让用户拨打0755为区号的所有号码,在限制号码中填写0755T即可;如果只是不想让用户拨打07551860,那么在限制号码中填写07551860即可。
1、线路管理属性介绍一、一般属性∙线路号码:即该线路的号码,如果同一域内进行呼叫时拨打此号码即可。
如果不同域内呼叫时需要拨打线路全号码才可以∙线路全号码:该编辑框为只读项,编辑框内容的显示为域号码+线路号码∙域名:选择该线路所属的域,域名的选择直接关系到线路全号码的显示∙端点名:选择该线路所属的端点设备∙线路密码:只有认证方式选择摘要认证的话,该项才生效。
认证方式选择摘要认证,该项处填写所需密码,则网关在注册软交时必须设置密码项才可以正常注册∙是否下级软交换:如果其它软交换通过上级注册方式接入本软交换,则将此节点设置为对接软交换的注册节点,将是否下级软交换选择为是,同时会多出是否加密协商单选按钮,如果是两台XMC软交换进行加密上级软交换对接,则将选择是协商加密,否则选择为否∙认证方式:不认证和基本认证目前无区别,选择该项时注册线路无需填写线路密码及邻域地址即可正常注册;如果选择摘要认证时,注册线路必须填写正确的线路密码及邻域地址才可以正常注册∙无条件前转:将补充业务的无条件前转单选框选中后,则需在无条件前转编辑框中输入要转移的号码。
该项的作用是只要接收到一方的呼叫,都将呼叫转移为所设置的号码∙遇忙呼叫前转:该项的作用是当接收方电话处于忙音信号时(比如正在通话),将呼叫转移为所设置的号码∙无应答前转:该项的作用是当接收方电话处于无人接听状态时,则将呼叫转移为所设置的号码∙补充业务中的免打扰:设置了该项后,任何电话都不能打入该号码二、详细属性∙呼叫限制:用于限制该端点设备禁止呼叫某些号码。
比如不想让用户拨打0755为区号的所有号码,在限制号码中填写0755T即可;如果只是不想让用户拨打07551860,那么在限制号码中填写07551860即可。
2、线路操作介绍一、添加线路点击“设备管理”--->“线路管理”--->“添加线路”在这里建一个最普通的节点,线路号码填写8000,选择该线路所在的域及端点,线路密码我们不填写,是否下级软交换选择否,认证方式选择不认证,各种增值业务不设置,不进行计费,点击“插入”按钮如果需要批量添加线路则点击“批量添加线路”按钮在使用中有可能我们需要批量添加一些连续的号码,这时用批量添加即可。
批量添加的多项参数同单路添加是一样的。
起始号码和结束号码为批量添加最关键的选项参数,如果需要批量添加从4000-4003,需要在起始号码填写4000,在结束号码填写4003,起始号码和结束号码的位数必须相同,比如要填加从1到100的号码,不能在起始号码写成1,正确的设置为起始号码处填写001,结束号码处填写100二、修改或删除线路点击“设备管理”--->“线路管理”,选择线路的“所属域”及“所属端点”后点击“查询”点击需要修改或删除线路中相应的按钮完成线路的修改或删除三、呼叫限制呼叫限制:同端点设备的呼叫限制是相同的,启到禁止拨打某些号码的作用。
端点设备的呼叫限制对整个端点设备启到全局的作用,因为有时候我们不想对该设备的所有线路端口都对此号码进行限制,我们只想让line 0禁止呼叫某一号码,这样只在line 0添加禁止的呼叫号码即可1、中继网关属性介绍一、一般属性∙名称:填写标识中继网关的名称∙域名:选择中继网关所在的域∙邻域:填写中继网关所设置的领域地址∙是否进行计费:设置中继网关计费∙呼叫前缀:中继网关做为被叫设备时的有效被叫前缀,如果其它域的节点需要通过此项的中继网关呼出,则中继网关的呼叫前缀必须和所在域的域呼叫前缀相同∙最大呼叫路数:可以限制通过中继呼出时最大的并发呼叫数,不填写默认为最大∙媒体端口指定方式:选择自动更新时则指定中继的媒体端口根据媒体服务器机制自动获得,选择SDP指定时则指定中继的媒体端口由SIP信令中的SDP获得。