a156_3
RTHD水冷螺杆式冷水机组

ef3mfisb1?Z8_0k2
*{D*qo;<Adl7<Uvq
]PwF20k{Dl7qep20
d;
k{D]{f
W<N?d[s
-2N??,
]x*na0n=
@E863a0TH|_MN565Ebq] OvmE3nkE{Da0P=qe {Da0+?dkinxNF?+? _:qddFy{Dnl7;Zf-d;.
MOEA0owl7nt6
kE{Dn]\81MHwEn,G zv
kE{Dn]\8@+EX+kMHZ kn|GwEl7fU{DVvpOn ]{j9+wEpOXdnP.N{q @jFb{D~vnj9;ZfWzk E{Dn]\8Fc<<18,qM_L_ ~gTnd5kE{Do/JJqcm ,ZqR1yhF]bV[-VW0.eJ>N>-1 ]`ZV.o4-+_vu|_>DGG \nZkf
4<:3A
5333A
49, 9,
:;,
kE{D 59, kbS 49, E*
8;,
_`p~A>kEsb?bx<+n0m d<
K_*0|usbPLC
CBr8_b[bn1_*sbqPLC sbk/@dAd@Zi0|uq5Q ZKV0L*D/ R|u]OM_vAd n:s/Apq]ddFy_vkE* l7;Zf-d43.
3420 Ek,E.kE{D
fqzsq{ e \qtsomt ew|mz~ `sy}sp Xrsttqz MQL+PML gwv{
EM9K
MOEA0F2F?nt6
Wz.qb[2F2]\eozF?n xN_vEMfMOEAsx1=V3Fr |.cmqHl7nEF?2Ek,E
遥控赛车毕业设计
遥控赛车毕业设计【篇一:遥控赛车毕业论文完整版】目录1 引言 (2)1.1红外遥控技术背景 (2)2 总体设计方案 (4)2.1 方案:红外遥控控制小车 (4)3 necupd6121g红外遥控系统 (5)3.1 necupd6121g (5)3.2 简单发射电路 (5)3.3 发射编码及信号波形 (6)4 at89s52单片机 (11)4.1 at89s52单片机 (11)5 l298n驱动模块 (16)5.11 l298n驱动模块说明 (16)5.2 l298芯片驱动参数 (16)5.3 功能简图 (16)6 遥控赛车系统框图及电路设计 (19)6.1系统框图及电路设计 (19)7红外遥控赛车程序设计 (20)7.1红外信号解码设计框图 (20)7.2 红外接收软件设计 (22)结束语 (24)参考文献 (25)附录一:电路原理图 (26)附录二:赛车实物图 (27)附录三:程序清单 (28)红外遥控赛车软件算法设计陈辉摘要:通过对设计要求的认真分析和研究,拿出了几种可行方案,最终选定一个最佳方案。
该方案是采用先进的单片机技术实现遥控,采用模块化设计,主要分为两个模块:红外遥控模块和l298电机驱动模块。
红外发射模块中通过upd6121g红外遥控器发射管对单片机发射信号,红外接收模块中的单片机受红外接收管接收的信号控制。
文章详细的讨论了实现上述红外遥控过程其工作原理和软件设计。
关键词:遥控器红外发射红外接收单片机1 引言1.1红外遥控技术背景红外遥控是一种无线、非接触控制技术,具有抗干扰能力强,信息传输可靠,功耗低,成本低,易实现等显著优点,被诸多电子设备特别是家用电器广泛采用,并越来越多的应用到计算机系统中。
60年代初,一些发达国家开始研究民用产品的遥控技术,单由于受当时技术条件限制,遥控技术发展很缓慢,70年代末,随着大规模集成电路和计算机技术的发展,遥控技术得到快速发展。
在遥控方式上大体经理了从有线到无限的超声波,从振动子到红外线,再到使用总线的微机红外遥控这样几个阶段。
a156_1

ANSI/BHMA A156.1-2000American National Standard for Butts and HingesStandard ANSI/BHMA A156.1-2000 establishes requirements for lightweight, standard weight, heavy weight and detention hinges. In addition, definitions, general information, material and dimensional requirements and tests (procedures and equipment) are included. Illustrations, type numbers and descriptions are provided for: full mortise hinges; full mortise hinges slip-in type; half mortise hinges; half surface hinges; anchor, pivot or reinforced thrust pivot unit and hinge sets; olive knuckle hinges; pivot hinges; rescue hardware; detention type hinges; special purpose hinges and light weight hinges.Tests and required results in this standard include:• Cycle• Hinge Pin Rise• Hinge Play• Vertical and Lateral Wear• Overload• Friction• Finish (or Salt Spray)Product grades are defined by progressive performance benchmarks in the given tests, with Grade 1 being the highest level of performance. For example, in the “cycle test,” a Grade 1 hinge must be able to perform 2,500,000 cycles, as compared to a Grade 3, which requires 350,000 cycles. The last digit of the product number identifies the grade of a BHMA product.The following are partial descriptions of test values. Please see the complete standard for additional tests : TEST Grade 1 Grade 2 Grade 3Cycle 2,500,000 1,500,000 350,000Hinge Pin Rise ¼ in (6.4 mm) ¼ in (6.4 mm) ¼ in (6.4 mm)Hinge Play .015 in (0.38 mm).015 in (0.38 mm) .015 in (0.38 mm)Vertical Wear .020 in (0.5 mm) .030 in (0.76 mm) .105 in (2.67 mm)Lateral Wear (maximum).062 in (1.6 mm) .062 in (1.6 mm) .062 in (1.6 mm)Sample Illustration:A8161Full Mortise Hinge - Heavy Weight - Friction Type。
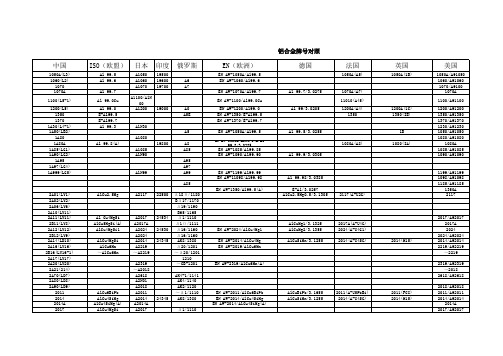
铝合金牌号对照
2117(A-U2G)
1199/A91199 1098/A91098 1185/A91185 1350A 2117
EN AW-2024/AlCu4Mg1 EN AW-2014/AlCu4Mg EN AW-2019/AlCu6Mn
AlCuMg1/3.1325 AlCuMg2/3.1355 AlCuSiMn/3.1255
AlMg1(B)
A5005
EN AW-5556A/AlMgMn EN AW-5051A/AlMg2(B) EN AW-5005/AlMg1(B)
5556A(NG61) AlMg1.8/3.3326 5005(A-G0.6) 5005(N41)
EN AW-2319/AlCu6Mn(A)
AlCu6BiPb AlCu4SiMg AlCu4SiMg(A) AlCu4MgSi AlCu4MgSi(A)
24345
EN AW-2011/AlCu6BiPb EN AW-2014/AlCu4SiMg EN AW-2014/AlCu4SiMg(A) EN AW-2017A/AlCu4MgSi(A)
ISO(欧盟)
Al 99.5 Al 99.6 Al 99.7 Al 99.0Cu Al 99.0 E-Al99.5 E-Al99.7 Al 99.3
日本
A1050 A1060 A1070
印度
19500 19600 19700
俄罗斯
A6 A7
EN(欧洲)
EN AW-1050A/Al99.5 EN AW-1060/Al99.6 EN AW-1070A/Al99.7 EN AW-1100/Al99.0Cu EN AW-1200/Al99.0 EN AW-1350/E-Al99.5 EN AW-1370/E-Al99.7 EN AW-1050A/Al99.5
京东方NT156WHM-N32 Preliminary Product SPEC_2014.07.09 (1)

<Table 1. General Specifications>
Specification 344.23(H) × 193.54(V)
1366 (H) × 768 (V) 0.252 (H) X 0.252 (V)
RGB Vertical stripe 262K
Normally White 359.5(H)*223.8(V) (W/PCB)*3.2(Max)
ISSUE DATE
2014.06.25 PAGE
7 OF 29
< Table 3. Electrical specifications >
Ta=25+/-2°C
Parameter Power Supply Voltage Permissible Input Ripple Voltage Power Supply Current Differential Input Voltage
R2010-6053-O(3/3)
4 A4(210 X 297)
PRODUCT GROUP
REV
SPEC. NUMBER
TFT- LCD PRODUCT
P0
SPEC. TITLE NT156WHM-N32 Preliminary Product Specification
1.3 Application
Source Driver
1.2 Features
1 lane eDP Interface with 1.62Gbps Link Rates Thin and light weight 6-bit color depth, display 262K colors Single LED Lighting Bar. (Down side/Horizontal Direction) No Mounting frame Green Product (RoHS & Halogen free product) On board LED Driving circuit Low driving voltage and low power consumption On board EDID chip
2014长安CS75全车维修手册3.1发动机-2.0L

ANSI BHMA A156.9

Not for Resale
--``,``-`-`,,`,,`,`,,`---
AMERICAN NATIONAL STANDARD
An American National Standard implies a consensus of those substantially concerned with its scope and provisions. An American National Standard is intended as a guide to aid the manufacturer, the consumer, and the general public. The existence of an American National Standard does not in any respect preclude anyone, whether he has approved the Standard or not, from manufacturing, marketing, purchasing or using products, processes, or procedures not conforming to the Standard. American National Standards are subject to periodic review and users are cautioned to obtain the latest editions.
4. PERFORMANCE TEST REQUIREMENTS............................................................. 6
4.1 Test Conditions ............................................................................................................................................. 6
五年级上册数学奥数试题-第3讲.行程——用比例解行程问题(含答案解析)人教版

1. 理解行程问题中正比例和反比例关系.2. 用比例和份数思想解行程问题.本讲是在秋季所学的火车过桥和流水行船的行程问题基础上,讲解运用比例性质解多次相遇追及行程问题.体会比例解决问题的优势.距离、速度、时间这三个数量之间的关系,可以用下面的公式来表示:距离=速度⨯时间.显然,知道其中的两个量,就可以求出第三个量,这是我们在小学课堂中经常解决的问题.同时对于三者之间的关系,我们还可以发现:当时间相同时,路程和速度成正比;当速度相同时,路程和时间成正比;当路程相同时,速度和时间成反比.也就是说:设甲、乙两个人,所走的路程分别为S 甲、S 乙;速度分别为V 甲、V 乙;所用时间分别为T 甲、T 乙时,由于S V T =⨯甲甲甲,S V T =⨯乙乙乙,有如下关系:⑴当时间相同即T T =乙甲时,有::S S V V =乙乙甲甲; ⑵当速度相同即V V =乙甲时,::S S T T =乙乙甲甲; ⑶当路程相同即S S =乙甲时,::V V T T =乙乙甲甲.【例 1】 甲、乙二人分别从A 、B 两地同时相向而行,甲的速度是每小时30千米,乙的速度是每小时20千米,二人相遇后继续行进,甲到B 地、乙到A 地后立即返回.已知二人第二次相遇的地点距第一次相遇的地点是20千米,那么,A 、B 两地相距___千米.第3讲用比例解行程问题用比例解多次相遇问题乙21B【分析】 因为甲乙同时出发,同时相遇,所以甲、乙相遇时间相同,因此:30:203:2S V V ===乙乙甲甲:S ,设全程为5份,则一个全程中,甲走了3份,乙走了2份,所以C 是第一次相遇地点,第一次相遇到第二次相遇,甲、乙共走2个AB ,因此从开始到第二次相遇,甲、乙共走了3个全程,一个全程甲走3份,3个全程甲共走339⨯=份,所以D 是第二次相遇地点,由图看出DC 是2份.但已知DC 是20千米,所以AB 的长度是20÷2⨯(2+3)=50(千米).(也可以用乙进行计算)[铺垫] 甲、乙两人在一条长100米的直路上来回跑步,甲的速度3米/秒,乙的速度2米/秒.如果他们同时分别从直路的两端出发,当他们跑了10分钟后,共相遇多少次?[分析] (方法一)10分钟两人共跑了(3+2)⨯60⨯10=3000 米 3000÷100=30个全程.我们知道两人同时从两地相向而行,他们总是在奇数个全程时相遇(不包括追上)1,3,5,7,L ,29共15次. (方法二)第一次两个人相遇需要100÷(3+2)=20(秒),从第一次开始到第二次相遇要走两个全程需要:200÷(3+2)=40(秒)所以一个相遇:(10⨯60-20)÷40+1=15.5(次),即为15次.[拓展] 老师可以把【例 1】的问题改为:已知两个人第四次相遇的地点距离第三次相遇的地点20千米,那么A 、B 两地相距多少千米?[分析] 由此推出,第三次相遇甲乙共走:3⨯2-1=5(个全程),甲走了:3⨯5=15(份)在B 点,第四次相遇甲乙共走:4⨯2-1=7(个全程),甲走了:3⨯7=21(份)在D 点,已知BD 是20千米,所以AB 的长度是20÷4⨯(2+3)=25(千米).【例 2】 甲、乙二人同时从A 地出发同向而行去往B 地,甲的速度是每小时30千米,乙的速度是每小时20千米,二人相遇后继续行进,甲、乙到B 地后立即返回A 地.已知二人第三次相遇的地点距第一次相遇的地点是20千米(两人相遇指迎面相遇),那么,A 、B 两地相距___千米.FE乙甲21DCBA【分析】 因为甲乙同时出发,同时相遇,所以甲、乙相遇时间相同,因此::30:203:2S S V V ===乙乙甲甲,设全程为5份,则一个全程中,甲走了3份,乙走了2份,第一次相遇,甲、乙一共行了两个全程,一个全程甲走3份,2个全程甲共走了326⨯=(份)所以C 是第一次相遇地点,第一次相遇到第二次相遇,甲、乙共走2个AB ,因此从开始到第二次相遇,甲、乙共走了4个全程,一个全程甲走3份,4个全程甲共走3412⨯=份,所以D 是第二次相遇地点,由图看出DC 是2份.但已知DC 是20千米,所以AB 的长度是20÷2⨯(2+3)=50(千米).(也可以用乙进行计算)[拓展] 老师可以把【例 2】的问题改为:已知两个人第四次相遇的地点距离第三次相遇的地点20千米,那么A 、B 两地相距多少千米?[分析] 由此推出,第三次相遇甲乙共走:3⨯2=6(个全程),甲走了:3⨯6=18(份)在第D 点,第四次相遇甲乙共走:4⨯2=8(个全程),甲走了:3⨯8=24(份)在F 点,已知DF 是20千米,所以AB 的长度是20⨯(2+3)=100(千米).[总结] 设一个全程中甲走的路程为M ,乙走的路程为N⑴甲乙二人从两端出发的直线型多次相遇问题: ⑵ 同一出发点的直线型多次相遇问题【例 3】 甲、乙两车分别从A 、B 两地同时出发相向而行,在A 、B 两地之间不断往返行驶.甲车速度是乙车速度的37,并且甲、乙两车第2008次相遇的地点和第2009次相遇的地点恰好相距120千米(注:当甲、乙两车同向时,乙车追上甲车不算作相遇),那么,A 、B 两地之间的距离是多少千米? 20092008甲DBA【分析】 因为甲乙同时出发,同时相遇,所以甲、乙相遇时间相同,因此3:7S V V ==乙乙甲甲:S :,设全程为10份,则一个全程中,甲走了3份,乙走了7份,通过总结的规律分析第2008次相遇时,甲走:(2008⨯2-1)⨯3=12045(份),120451012045÷=L ,所以第2008次相遇地点是在从A 地向右数5份的C 点,第2009次相遇时甲走:(2009⨯2-1)3⨯=12051(份),120511012051÷=L ,所以第2009次相遇地点在从B 点向左数1份的D 点,由图看出CD 间距离为4份,A 、B 两地之间的距离是120410300÷⨯=(千米).[总结] 对于份数比较大找相遇地点时,用甲走的总份数除以全程份数,得到商和余数,当商为偶数时,从甲的出发点向终点数余数的份数即为相遇地点,当商为奇数时,从终点向甲的起点数余数的份数即为相遇地点[巩固] 甲、乙二人分别从A 、B 两地同时出发,往返跑步.甲每分跑180米,乙每分跑240米.如果他们的第100次相遇点与第101次相遇点的距离是160米,求A 、B 两点间的距离为多少米?101100乙甲A相遇次数 甲乙共走的路程和 甲共走的路程 乙共走的路程1 1 M N2 3 3M 3N3 5 5M 5N… … … …n 21n - (21)n M - (21)n N - 相遇次数 甲乙共走的路程和 甲共走的路程 乙共走的路程1 2 M N 2 4 4M 4N 3 6 6M 6N … … … … n2n 2nM 2nN[分析]因为甲乙同时出发,同时相遇,所以甲、乙相遇时间相同,因此180:2403:4S V V====乙乙甲甲:S:,设全程为7份,则一个全程中,甲走了3份,乙走了4份,通过总结的规律分析第100次相遇时,甲走:(100⨯2-1)⨯3=597(份),5977852÷=L,所以第100次相遇地点是在从B地向左数2份的C点,第101次相遇时甲走:(101⨯2-1)3⨯=603(份),6037861÷=L,所以第101次相遇地点在从A点向右数1份的D点,由图看出CD间距离为4份,A、B两地之间的距离是16047280÷⨯=(米).【例 4】小张与小王分别从甲、乙两村同时出发,在两村之间往返行走(到达另一村后就马上返回),他们在离甲村3.5千米处第一次相遇,在离乙村2千米处第二次相遇.问他们两人第六次相遇的地点离乙村多远(相遇指迎面相遇)?【分析】画示意图如下.2123.5乙甲第二次相遇两人已共同走了甲、乙两村距离的3倍,因此张走了3.5⨯3=10.5(千米).从图上可看出,第二次相遇处离乙村2千米.因此,甲、乙两村距离是10.5-2=8.5(千米).第六次相遇时,两人已共同走了两村距离26111⨯-=倍的行程.其中张走了3.51138.5⨯=(千米),38.58.54 4.5÷=L,就知道第六次相遇处,离乙村4.5千米.[巩固]甲、乙二人以均匀的速度分别从A、B两地同时出发,相向而行,他们第一次相遇地点离A地4千米,相遇后二人继续前进,走到对方出发点后立即返回,在距B地3千米处第二次相遇,求两次相遇地点之间的距离.[分析]第二次相遇两人总共走了3个全程,所以甲一个全程里走了4千米,三个全程里应该走4⨯3=12千米,通过画图,我们发现甲走了一个全程多了回来那一段,就是距B地的3千米,所以全程是12-3=9千米,所以两次相遇点相距9-(3+4)=2千米.【例 5】A、B两地相距2400米,甲从A地、乙从B地同时出发,在A、B间往返长跑.甲每分钟跑300米,乙每分钟跑240米,在30分钟后停止运动.甲、乙两人在第几次相遇时距A地最近?最近距离是多少米?【分析】(300240)302400 6.75+⨯÷=(个),即甲乙共行了6.75个全程,共相遇了3次,甲乙两人的速度比是300:2405:4=,设全程为9份,第一次相遇甲行5份,乙行4份,所以第一次相遇地点距A地是全程的59,第二次相遇时两人共行了3个全程,甲行的距A地9(359)3-⨯-=份,所以第二次相遇地点距A地是全程的13,第三次相遇时两人共行了5个全程,55927⨯÷=L甲行的距A地7份,所以第三次相遇地点距A地是全程的79,所以第二次相遇距A地最近,最近距离是124008003⨯=(米)【例 6】A、B是一圈形道路的一条直径的两个端点,现有甲、乙两人分别从A、B两点同时沿相反方向绕道匀速跑步(甲、乙两人的速度未必相同),假设当乙跑完100米时,甲、乙两人第一次相遇,当甲差60米跑完一圈时,甲、乙两人第二次相遇,那么当甲、乙两人第二十一次相遇时,甲跑完几圈又几米?【分析】 甲、乙第一次相遇时共跑0.5圈,乙跑了100米;第二次相遇时,甲、乙共跑1.5圈,则乙跑了1003300⨯=米,此时甲差60米跑一圈,则可得0.5圈是30060240-=米,一圈是480米. 第一次相遇时甲跑了240100140-=米,以后每次相遇甲又跑了1402280⨯=米,所以第二十一次相遇时甲共跑了:140280(211)5740+⨯-=(米),574048011460÷=L .即跑完11圈又460米.[铺垫] 甲和乙两人分别从圆形场地的直径两端点同时开始以匀速按相反的方向绕此圆形路线运动,当乙走了100米以后,他们第一次相遇,在甲走完一周前60米处又第二次相遇.求此圆形场地的周长?[分析] 第一次相遇,两人共走了0.5圈;第二次相遇,两人共走了1.5圈.所以第二次相遇时,乙一共走了¼BAD 1003300=⨯=(米),又知到»AD 60=(米),所以圆形场地的半周长为30060240-=(米),那么,周长为2402480⨯=米.【例 7】 A 、B 两地相距13.5千米,甲、乙两人分别由A 、B 两地同时相向而行,往返一次,甲比乙早返回原地,途中两人第一次相遇于C 点,第二次相遇于点D ,CD 相距3千米,则甲.乙两人的速度比是为多少?【分析】 方法一:根据题意画图如下乙甲21DB设甲、乙第一次相遇时分别走的路程为x 千米,y 千米,依题意列方程组得,3313.53313.5x y y x --=⎧⎨+-=⎩解得7.56x y =⎧⎨=⎩,所以甲乙的速度比,即为甲乙路程比7.5:65:4==方法二:用甲、乙代表两个人第一次相遇走的路程,可以整体的分析从开始到第二次相遇甲走的路程为:3⨯甲,乙走的路程为:3⨯乙,甲乙二人的路程差为:3⨯(甲-乙);分开考虑甲一共走的路程为:一个全程+乙+3,乙一共走的路程为:一个全程+甲-3,两个人的路程差为:(一个全程+乙+3)-(一个全程+甲-3)=乙-甲+6.综合列式为:3(甲-乙)=乙-甲+6,得到:甲-乙=1.5,由于,甲+乙=13.5,所以甲=7.5(千米),乙=6(千米),所以甲乙的速度比,即为甲乙路程比7.5:65:4==.【例 8】 两辆电动小汽车在周长为360米的圆形道上不断行驶,甲车每分行驶20米.甲、乙两车同时分别从相距90米的A ,B 两点相背而行,相遇后乙车立即返回,甲车不改变方向,当乙车到达B 点时,甲车过B 点后恰好又回到A 点.此时甲车立即返回(乙车过B 点继续行驶),再过多少分与乙车相遇?DC 甲B A乙甲ABC乙甲AB【分析】 设右图中C 表示甲、乙第一次相遇地点.因为乙从B 到C 又返回B 时,甲恰好转一圈回到A ,所以甲、乙第一次相遇时,甲刚好走了半圈,因此C 点距B 点809090-=(米).因此相同时间内,甲乙所行路程比为180:902:1=,所以甲乙二人的速度比为2:1,因此乙每分行驶20210÷=(米),甲、乙第二次相遇,即分别同时从A ,B 出发相向而行相遇需要90(1020)3÷+=(分).[拓展] 如图所示,某单位沿着围墙外面的小路形成一个边长300米的正方形.甲、乙两人分别从两个对角处沿逆时针方向同时出发.如果甲每分走90米,乙每分走70米,那么经过多少时间甲才能看到乙?乙甲[分析] 甲看到乙的时候,甲和乙在同一条边上,甲乙两人之间的距离最多有300米长,当甲追上乙一条边(300米)需300(9070)15÷-=(分),此时甲走了9015300 4.5⨯÷=(条)边,甲、乙不在同一条边上,甲看不到乙.甲再走0.5条边就可以看到乙了,即甲走5条边后可看到乙,共需2300590163⨯÷=分钟,即16分40秒.【例 9】 甲、乙二人分别从A 、B 两地同时出发,如果两人同向而行,甲26分钟赶上乙;如果两人相向而行,6分钟可相遇,又已知乙每分钟行50米,求A 、B 两地的距离.【分析】 先画图如下:C262666乙甲B方法一: 若设甲、乙二人相遇地点为C ,甲追及乙的地点为D ,则由题意可知甲从A 到C 用6分钟.而从A 到D 则用26分钟,因此甲从C 走到D 之间的路程时,所用时间应为:26620-=(分).用比例解其他行程问题同理乙从C走到D之间的路程时,所用时间应为:26632+=(分),所以相同路程内甲乙所用时间比为20:325:8=,因此甲、乙二人的速度比为8:5,所以甲的速度为505880÷⨯=(米/分),A、B两地的距离为(8050)6780+⨯=(米),或(8050)26780-⨯=(米)方法二:设甲的速度是x米/分钟那么有(50)26(50)6x x-⨯=+⨯解得80x=A、B两地的距离为(8050)6780+⨯=(米),或(8050)26780-⨯=(米)[拓展]甲、乙两人分别从A、B两地同时相向出发.相遇后,甲继续向B地走,乙马上返回,往B地走.甲从A地到达B地.比乙返回B地迟0.5小时.已知甲的速度是乙的34.甲从A地到达地B共用了多少小时?[分析]相遇时,甲、乙两人所用时间相同.由题意知,甲乙二人速度比为3:4,所以甲乙二人所行的路程比为3:4,从相遇到返回B地,甲乙所行路程相同,所以返回所用时间比为4:3,又知甲从A地到达B地比乙返回B地迟0.5小时,即从相遇点到B地这同一段路程中,甲比乙多用0.5小时.可求出从相遇点到B地甲用了0.542⨯=(小时),相遇时,甲乙二人所行的路程比为3:4,甲用时为243 1.5÷⨯=(小时)甲从A地到达地B共用2 1.5 3.5+=(小时)【例10】一辆汽车从甲地开往乙地,如果车速提高20%,可以提前1小时到达.如果按原速行驶一段距离后,再将速度提高30%,也可以提前1小时到达,那么按原速行驶了全部路程的几分之几?【分析】设原速度是1. 后来速度为(120%) 1.2+=,速度比值:1:(120%)5:6+=这是具体地反映:距离固定,时间与速度成反比.时间比值6:5这样可以把原来时间看成6份,后来就是5份,这样就节省1份,节省1个小时.原来时间就是1⨯6=6小时.同样道理,车速提高30%,速度比值:1:(130%)10:13+=时间比值:13:10这样节省了3份,节省1小时,可以推出行驶一段时间后那段路程的原时间为13 3所以前后的时间比值为(6-133):1335:13=.所以总共行驶了全程的5135=+518.[巩固](第三届走美试题)从上海开车去南京,原计划中午11:30到达.但出发后车速提高了17,11点钟就到了.第二天返回,同一时间从南京出发.按原速行驶了120千米后,再将车速提高16,到达上海时恰好11:10.上海、南京两市的路程是千米.[分析]由题意设原来速度和车速提高了17后速度比为7:8,则所用时间比为8:7,设原计划用时8份,提速后用时7份,差的一份正好是30分钟,,则原计划用时为240分钟,返回时间缩短20分钟,是由于车速提高16,原来计划速度与返回提速后速度比为6:7,则返回提速后这段路程内所用时间比为7:6,设这段路程原计划用时7份,提速后用时为6份,差的一份正好是20分钟,所以返回提速后用时120分钟,原计划用时140分钟,则原速行驶120千米用时240140100-=(分钟),上海、南京两市的路程是120100240288÷⨯=(千米)【例11】甲、乙两人分别从A、B两地同时出发,相向而行,出发时他们的速度之比是3:2,他们第一次相遇后甲的速度提高了20﹪,乙的速度提高了30﹪,这样,当甲到达B地时,乙离A地还有14千米,那么A、B两地的距离是多少千米?【分析】 因为他们第一次相遇时所行的时间相同,所以第一次相遇时甲、乙两人行的路程之比也为3:2,设第一次相遇时甲、乙两人行的路程分别是3份,2份相遇后,甲、乙两人的速度比为[][]3(120%):2(130%)18:13⨯+⨯+=,到达B 地时,即甲又行了2份的路程,这时乙行的路程和甲行的路程比是13:18,即乙的路程为21318⨯=419.乙从相遇后到达A 还要行3份的路程,还剩下4531199-=(份),正好还剩下14千米,所以1份这样的路程是514199÷=(千米).A 、B 两地有这样的325+=(份),因此A 、B 两地的总路程为:9545⨯=(千米)【例12】 (第五届走美决赛试题)小王8点骑摩托车从甲地出发前往乙地,8点15追上一个骑车人.小李开大客车8点15从甲地出发前往乙地,8点半追上这个骑车人.小张8点多也从甲地开小轿车出发前往乙地,速度是小李的1.25倍.当他追上骑车人后,速度提高了20%.结果小王、小李、小张三人一同于9点整到达乙地.小王、小李、骑车人的速度始终不变.骑车人从甲地出发时是 点 分,小张从甲地出发时是8点 分 秒.【分析】9:009:009:009:00骑车人小张小李8:15小王8:00乙地15分15分由题意知小王与小李从甲地到乙地所用时间分别是60分、45分,因此小王与小李的速度比是3:4,又小张速度是小李的1.25倍,因此小王、小李、小张的速度比为3:4:5,设小王、小李、小张的速度分别为3、4、5.由上图可以看小李比小王15分钟多行的路程恰是骑车人15分钟的路程,因此骑车人的速度为(43)15151-⨯÷=,即小王的速度是骑车人的3倍,而小王追上骑车人要15分钟,所以骑车人行这段路程要45分钟,因此骑车人是8点30分出发的.小王从甲地到乙地要1小时,可知全程为603180⨯=,因此骑车人到乙地要3小时,骑车人在9点时恰好行了全程的一半,由题意小张追上骑车人后速度变为6,从追上骑车人到到达乙地小张比骑车人多行了180290÷=,因此小张以速度6行驶路程所用时间为90(61)18÷-=(分),所行路程为186108⨯=,则追赶骑车人所用时间为(180108)514.4-÷=(分),因此小张从甲地到乙地共用时间为1814.432.4+=(分)=32分24秒,即小张从甲地出发时是8点27分36秒[巩固] 甲从A 出发步行向B .同时,乙、丙两人从B 地驾车出发,向A 行驶.甲乙两人相遇在离A 地3千米的C 地,乙到A 地后立即调头,与丙在C 地相遇.若开始出发时甲就跑步,速度提高到步行速度的2.5倍,则甲、丙相遇地点距A 地7.5千米.求AB 两地距离. [分析] 设BC 间的路程为S ,甲的速度为v 甲,乙的速度为v 乙,丙的速度为v 丙,由题意知,3v v S=甲乙,6v S v S +=乙丙,则36)v S v S S ⨯+=⨯甲丙(,甲提速后速度变为2.5v 甲.则2.57.5(7.53)v v S =--甲丙,即34.5v v S =-甲丙,所以36)34.5S S S S ⨯+=⨯-(,解得18S =,所以AB 两地间路程为18321+=(千米)1.甲、乙两车同时分别从相距55千米的AB 两地相向开出,甲行驶了23千米后跟乙相遇,相遇后两车继续前进,到达对方出发地后立刻返回.问:⑴ 第2次相遇点距B 地多少千米?⑵第6次相遇点距A 地多少千米?【分析】 通过分析,我们可以发现:一个全程里甲走23千米,⑴ 第2次相遇共3全程,故甲走了23⨯3=69(千米),甲走了一个全程多了一点,故距离B 地就是69-55=14(千米).⑵第6次相遇总共是11个全程,故甲走了23⨯11=253(千米),25355433÷=L ,甲走了4个全程多点,多的那部分就是我们要求的距A 的距离为:33千米.2. 甲、乙两列车同时从A 、B 两地相对开出,第一次在离A 地75千米处相遇.相遇后继续前进,到达对方出发地后都又立刻返回,第二次相遇在离B 地55千米处,求A 、B 两地相距多远.【分析】 通过画图找出行程之间的关系.第一次相遇就相当于甲车和乙车一共走了一个全程,根据总结:第2次相遇总共走了3个全程,则甲就走了3个75千米,3⨯75=225千米,画图可以知道甲走了一个全程多了那55千米,所以全程为225-55=170千米.3. 甲、乙两车分别从A 、B 两地出发,并在A 、B 两地间不断往返行驶,已知甲车的速度是15千米/小时,乙车的速度是25千米/小时,甲乙两车第三次相遇地点与第四次相遇的地点相差100千米,求A 、B 两地的距离是多少千米?【分析】 甲、乙两车的速度比为:15:253:5=,所以可以把全程分成8份,每走一个全程甲走3份,乙走5份,第三次相遇甲乙共走:3215⨯-=(个全程),甲走了:3515⨯=(份),第四次相遇甲乙共走:4217⨯-=(个全程),甲走了:3721⨯=(份),画图知到两次相遇点100米是4份,所以AB 的长度是10048200÷⨯=(千米).4. 甲、乙两车的速度分别为52千米/时和40千米/时.他们同时从A 地出发去B 地,在A 、B 两地间往返而行,从开始走到第三次相遇,共用了6小时.A 、B 两地相距多少千米?【分析】 从开始走到第一次相遇,两车走的路程是两个AB 之长;而到第三次相遇,两车走的路程总共就是6个AB 之长是:(52+40)⨯6=552(千米),A 、B 两地相距的路程是:552÷6=92(千米).5. 一列火车从甲地开往乙地,如果将车速提高,可以比原计划提前1小时到达;如果先以原速度行驶240千米后,再将速度提高25%,则可提前40分钟到达.求甲、乙两地之间的距离及火车原来的速度.【分析】 根据题意可知车速提高后与原来速度比为(1+20%) :1=6:5,由于所行路程相同,所以所用时间比为5:6,所差时间是1小时,即1份是1小时,所以原来行完全程需要6小时,同理可求出行完240千米后所用时间为40⨯5=200(分钟)=133(时),所以行240千米所用时间为6-133=83(时),火车速度为240÷83=90(千米/时),甲乙两地间的距离为90⨯6=540(千米)6.一只小船第一次顺流航行65千米,逆流航行21千米,一共用了10小时;第二次顺流航行20千米,逆流航行12千米,用了4小时.那么船在静水中航行64千米需要多长时间?【分析】如果把第二次航行中顺流和逆流的航程增加到2.5倍,显然时间会变成:4 2.510⨯=小时;顺流航行20 2.550⨯=千米;逆流航行12 2.530⨯=千米.而第一次航行也是花了10小时,但是顺流航程和逆流航程分别是65和21千米.通过比较很容易看出第二次航行比第一次少了,655015-=千米的顺流航程,但是多了30219-=千米的逆流航程.顺流走15千米所花的时间和逆流走9千米所花的时间相等,由此可知顺流速度和逆流速度比应该是15:95:3=,因此相同时间内顺水路程和逆水路程比为5:3,逆流航行21千米相当于顺流航行35千米,所以顺水速度为(6535)1010+÷=(千米/时),逆水速度为10536÷⨯=(千米/时),静水速度为(106)28+÷=(千米/时),船在静水中航行64千米需要6488÷=(小时)巨蟒与豹子在一个原始森林里,一条巨蟒和一头豹子同时盯上了一只羚羊.豹子看着巨蟒,巨蟒看着豹子,各自打着“算盘”.豹子想:如果我要吃到羚羊,必须首先消灭巨蟒.巨蟒想:如果我要吃到羚羊,必须首先消灭豹子.于是几乎在同一时刻,豹子扑向了巨蟒,巨蟒扑向了豹子.豹子咬着巨蟒的脖颈想:如果我不下力气咬,我就会被巨蟒缠死.巨蟒缠着豹子的身子想:如果不下力气死缠,我就会被豹子咬死.于是双方都死命地用着力气.最后,羚羊安详地踱着步子走了,而豹子与巨蟒双双倒地.猎人看了这一场争斗甚是感慨,说:“如果两者同时扑向猎物,而不是扑向对方,然后平分食物,两者都不会死;如果两者同时走开,一起放弃猎物,两者都不会死;如果两者中一方走开,一方扑向猎物,两者都不会死;如果两者在意识到问题的严重性时互相松开,两者也都不会死.它们的悲哀就在于把本该具备的谦让转化成了你死我活的争斗.”巨蟒和豹子的悲哀在于它们本应该互相谦让,合作吃到鲜美的羚羊,但是却最后落得两败俱伤的下场.原因就在于它们的眼中都只有自己的利益,而根本没有想到他人.没有合作观念,自私自利的人最终必然会遭遇失败.|五年级第三讲竞赛班|11。
NVIDIA A100 GPU系统规格说明书
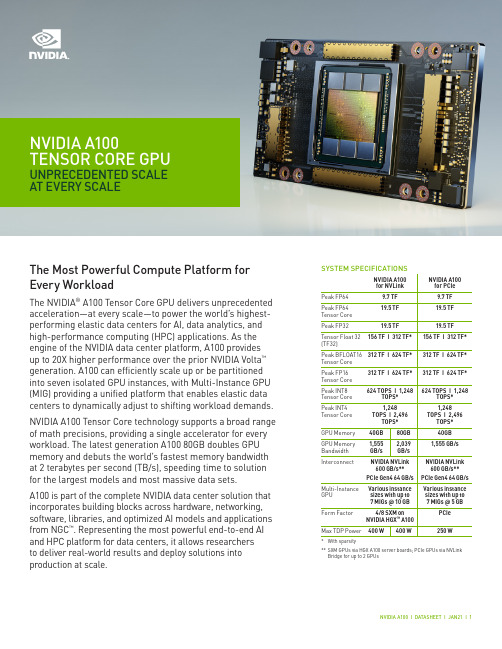
SYSTEM SPECIFICATIONSNVIDIA A100 for NVLinkNVIDIA A100 for PCIePeak FP649.7 TF 9.7 TF Peak FP64 Tensor Core 19.5 TF 19.5 TF Peak FP3219.5 TF 19.5 TF Tensor Float 32 (TF32)156 TF | 312 TF*156 TF | 312 TF*Peak BFLOAT16 Tensor Core 312 TF | 624 TF*312 TF | 624 TF*Peak FP16 Tensor Core 312 TF | 624 TF*312 TF | 624 TF*Peak INT8 Tensor Core 624 TOPS | 1,248 TOPS*624 TOPS | 1,248TOPS*Peak INT4 Tensor Core 1,248TOPS | 2,496TOPS*1,248TOPS | 2,496TOPS*GPU Memory 40GB 80GB 40GB GPU Memory Bandwidth 1,555 GB/s2,039 GB/s1,555 GB/s InterconnectNVIDIA NVLink 600 GB/s**PCIe Gen4 64 GB/s NVIDIA NVLink 600 GB/s**PCIe Gen4 64 GB/s Multi-Instance GPU Various instance sizes with up to 7 MIGs @ 10 GB Various instance sizes with up to 7 MIGs @ 5 GBForm Factor 4/8 SXM on NVIDIA HGX ™ A100PCIe Max TDP Power400 W400 W250 W* With sparsity** SXM GPUs via HGX A100 server boards; PCIe GPUs via NVLink Bridge for up to 2 GPUsNVIDIA A100TENSOR CORE GPUUNPRECEDENTED SCALE AT EVERY SCALEThe Most Powerful Compute Platform for Every WorkloadThe NVIDIA ® A100 Tensor Core GPU delivers unprecedented acceleration—at every scale—to power the world’s highest-performing elastic data centers for AI, data analytics, and high-performance computing (HPC) applications. As the engine of the NVIDIA data center platform, A100 provides up to 20X higher performance over the prior NVIDIA Volta ™ generation. A100 can efficiently scale up or be partitioned into seven isolated GPU instances, with Multi-Instance GPU (MIG) providing a unified platform that enables elastic data centers to dynamically adjust to shifting workload demands. NVIDIA A100 Tensor Core technology supports a broad range of math precisions, providing a single accelerator for every workload. The latest generation A100 80GB doubles GPU memory and debuts the world’s fastest memory bandwidth at 2 terabytes per second (TB/s), speeding time to solution for the largest models and most massive data sets. A100 is part of the complete NVIDIA data center solution that incorporates building blocks across hardware, networking, software, libraries, and optimized AI models and applications from NGC ™. Representing the most powerful end-to-end AI and HPC platform for data centers, it allows researchers to deliver real-world results and deploy solutions into production at scale.1X2X3XUp to 3X Higher AI Training on Largest Models DLRM TrainingUp to 249X Higher AI Inference Performance over CPUs BERT-LARGE InferenceGroundbreaking InnovationsNEXT-GENERATION NVLINKNVIDIA NVLink in A100 delivers 2X higher throughput compared to the previous generation. When combined with NVIDIA NVSwitch ™,up to 16 A100 GPUs can be interconnected at up to 600 gigabytes per second (GB/ sec), unleashing the highest application performance possible on a single server . NVLink is available in A100 SXM GPUs via HGX A100 server boards and in PCIe GPUs via an NVLink Bridge for up to 2 GPUs.efficiency at 95%. A100 delivers 1.7X highermemory bandwidth over the previous generation.to breakthrough acceleration for all their applications, and IT administrators can offer right-sized GPU acceleration for every job, optimizing utilization and expanding access to every user and application.STRUCTURAL SPARSITYAI networks have millions to billions of parameters. Not all of these parameters are needed for accurate predictions, and somecan be converted to zeros, making the models “sparse” without compromising accuracy. Tensor Cores in A100 can provide up to 2X higher performance for sparse models. While the sparsity feature more readily benefits AI inference, it can also improve the performance of model training.01X2XUp to 1.25X Higher AI Inference Performance over A100 40GB RNN-T Inference: Single StreamTime to Solution - Relative PerformanceCPU OnlyV100 32GBA100 40GBA100 80GBBig data analytics benchmark | 30 analytical retail queries, ETL, ML, NLP on 10TB dataset | CPU: Intel Xeon Gold 6252 2.10 GHz, Hadoop | V100 32GB, RAPIDS/Dask | A100 40GB and A100 80GB, RAPIDS/Dask/BlazingSQLUp to 1.8X Higher Performance for HPC Applications Quantum Espresso2017P1002016201820192020Throughput - Relative PerformanceGeometric mean of application speedups vs. P100: Benchmark application: Amber [PME-Cellulose_NVE], Chroma [szscl21_24_128], GROMACS [ADH Dodec], MILC [Apex Medium], NAMD [stmv_nve_cuda], PyTorch (BERT-Large Fine Tuner], Quantum Espresso [AUSURF112-jR]; Random Forest FP32 [make_blobs (160000 x 64: 10)], TensorFlow [ResNet-50], VASP 6 [Si Huge] | GPU node with dual-socket CPUs with 4x NVIDIA P100, V100, or A100 GPUs.Incredible Performance Across Workloads© 2021 NVIDIA Corporation. All rights reserved. NVIDIA, the NVIDIA logo, CUDA, DGX, HGX, HGX A100, NVLink, NVSwitch, OpenACC, TensorRT, To learn more about the NVIDIA A100 Tensor Core GPU, visit /a100The NVIDIA A100 Tensor Core GPU is the flagship product of the NVIDIA data center platform for deep learning, HPC, and data analytics. The platform accelerates over 1,800 applications, including every major deep learning framework. A100 is available everywhere, from desktops to servers to cloud services, delivering both dramatic performance gains and cost-saving opportunities.。
四核铜化合物(Cu4L4)(CH3CN)(H 2L=(R)-1-(1-羟基正丁烷-2-氨甲基)萘-2-醇)的合成、晶体结构及磁性
>?’$+,6$@ =, +,NAO2PPGQ+L,2NA- -GQRS2T U+V2) G, -GRR2P! +,) -IAP+S D-IAOO#U+V2 SAL+,) %!4#"#%%"#I.)PGT.U*N+,# &#.SAQA,G4Q2NI.S4,+RINI+S2,#&#GS %5&64 WANI OGPQ*S+ GO %8*9694 %85’8:4 W+V V.,NI2VAX2) +,) VNP*-N*P+SS. -I+P+-N2PAX2)1 DA,LS2#-P.VN+S VNP*-N*P2 VIGWV NI+N NI2 -GQRS2T -G,VAVNV GO +, A,GPL+,A- -GP2 OGPQ2) U. OG*P 8* ! AG,V +,) OG*P GT.L2, +NGQV OPGQ OG*P SAL+,)V P2VR2-NAY2S.1 C+L,2NA- Q2+V*P2Q2,NV VIGW NI+N + W2+Z +,NAO2PPGQ+L,2NA- -G*RSA,L G--*PV A, NI2 -GQRS2T1 88J8[ !&$>$$1
%\Z
$/0123/45 641782459 :.; <.!=> ?@7 A8797/1 B38C 91769 D836 3$8 2/178791 2/ 7EA5382/F 1@29 0@762918G HG $92/F 1@7 6$512I7/1417 0@2845 J0@2DD!H497 52F4/I +!’!.!++.!@GI83! EGH$14/!,!G5262/3’ 671@G5’/4A@1@457/!,!35 +(,&’>
RICOH 打印机 操作说明书

i
装载信封 ............................................................................................................... 42
4. 样张打印 / 锁定打印
样张打印 .................................................................................................... 47 打印样张打印文件 ............................................................................................... 47 删除样张打印文件 ............................................................................................... 49 查看错误日志 ....................................................................................................... 50
RPCS -使用打印机属性 ............................................................................. 8 使用打印机属性 ..................................................................................................... 8
力士乐报警代码及说明一揽
力士乐报警代码及说明一揽力士乐驱动器报警代码查询,有用力士乐驱动器的工程师,可以转载查询。
DKC 故障诊断 1 诊断信息 F 和诊断信息 E 的说明1.1 错误诊断信息F F205 凸轮轴故障F207 切换至未初始化运行模式F208 UL 电机类型已变F209 PL 装载参数默认值F211 DISC-Error no.1(1#错误)F212 F212 F212 DISC-Error no.2(2#错误) DISC-Error no.3(3#错误) DISC-Error no.4(4#错误)F217 未接冷却风扇F218 放大器过热关机F219 电机过热关机F220 制动电阻器过载关机F221 电机温度监控器故障F223 停止轴时的初始化过程错误F224 超过最大制动时间F226 功率部分欠电压F228 过大偏差F229 编码器 1 故障:象限错误F230 超过编码器 1 最大信号频率F236 位置反馈的差值过大F237 位置指令的差值过大F238 实际速度值的差值过大F242 编码器 2 故障:信号幅度错误F245 编码器 2 故障:象限错误F246 超过编码器 2 最大信号频率F248 电池电压过低F249 主驱动器编码器故障:信号太小F250 目标位置预置内存溢出F252 主驱动器编码器故障:象限错误F253 增量编码器仿真:脉冲频率太高F260 指令电流极限关闭F262 状态输出口出现外部短路F267 内部硬件同步错误F269 电机制动器释放过程中错误F276 绝对编码器超出允许的窗口F277 电流测量补偿错误F281 主回路故障F288 EMD 模块固件升级过程中出现错误F291 EMD 模块超时F292 EMD 模块过热F294 Ecox 客户端超时F296 Ecox 客户端数量不准确F297 Ecox 客户端错误F386 电源模块没有就绪信号F401 双 MST 故障关机F402 双 MDT 故障关机F403 通信阶段关机F404 阶段前进过程中出现错误F405 阶段后退过程中出现错误F406 阶段切换无就绪信号F407 主通信初始化过程中的错误F411 双 SST 故障关机F434 紧停 E-STOP F629 超过正行程极限 F630 超过负行程极限F634 紧停 E-STOPF643 探测到正行程极位开关F644 探测到负行程限位开关F811 换算偏置无法确定F812 在换算过程中移动越程F822 编码器 1 故障:信号幅度错误F843 编码器 2 故障:信号幅度错误F845 编码器 2 故障:象限错误F850 看门狗协处理器F860 过流:功率部分有短路F870 +24v 直流错误F873 电源驱动部分故障F878 速度环错误F880 经过优化的换算偏置错误1.2 报警诊断信息E E211 DISC-#1 报警E212 E212 E212 DISC-#2 报警 DISC-#3 报警 DISC-#4 报警 E217 冷却风扇转速太慢E221 报警电机温度监控有故障E225 电机过载E226 功率部分欠电压E247 插补速度=0E248 插补加速度=0E249 定位速度>=S-0-0091 E250 驱动器过热预报警E251 电机过热预报警E252 制动电阻器过载预报警E253 目标位置超出行程范围E254 未回零E255 进给倍率 S-0-108=0E256 转矩限制=0E257 连续电流限制活动E258 选定的处理块未编程E259 指令速度限制活动261 连续电流限制预报警E263 速度指令值>极限 S-0-0091E264 目标位置超过数字范围E267 硬件同步有故障E269 制动器的制动转矩太低E281 主回路故障E288 EMD 模块固件升级活动 EMD 模块超时 EMD 模块欠电压 Ecox 客户端数量不准确E289 等待 Ecox 服务器端扫描E291 E293 E296E386 电源模块无就绪信号E408 MDT 数据存储器 A 无效编址E409 AT 数据存储器 A 无效编址E410 客户端未被扫描或地址为0 E411 双 SST 故障E825 功率部分过电压E826 功率部分欠电压E829 超过正位置极限E830 超过负位置极限E831 在点动过程中达到位置极限E834 紧停 E-STOPE843 正限位开关活动E844 负限位开关活动E881 主回路故障E886 电源模块没有准备好信号2 诊断信息 B、C、D 和诊断信息 A 的说明 2.1 指令诊断信息 B、C 和 DB100 指令释放电机制动器B101 指令未使能B200 制动器检查指令B201 只在驱动器使能时进行制动器检查B202 在制动器嵌入过程中出现错误B203 制动器制动转矩太低B300 后备工作内存过程指令C100 通讯阶段 3 转换检查C101 无效通信参数(S-0-0021)C102 通信参数极限错误(S-0-0021)C104 MDT 的配置 IDN 不可配置C105 配置长度大于 MDT 最大长度C106 AT 的配置 IDN 不可配置C107 配置长度大于 AT 最大长度C108 时间片参数大于 Sercos 循环时间C109 MDT(S-0-0009)中的数据记录位置为偶数C110 MDT(S-0-0010)长度为奇数C111 1D9+记录长度-1 大于长度 MDT(S-0-0010)C112 TNcyc(S-0-0001)或 TScyc(S-0-0002)错误C113 TNcyc(S-0-0001)与 TScyc(S-0-0002)的关系错误 C114 T4 大于 TScyc(S-0-0002)-T4min(S-0-0005)C115 T2 数值太小C118 MDT 配置顺序错误C200 通讯阶段 4 转换检查C201 无效参数(S)(->S-0-0022)C202 参数极限错误(->S-0-0022)C203 参数计算错误(->S-0-0022)C204 电机类型 P-0-4014 不准确C210 要求反馈 2(->S-0-0022)C211 无效反馈数据(->S-0-0022)C212 无效放大数据(->S-0-0022)C213 位置数据比例错误C214 速度数据比例错误C215 加速度数据比例错误C216 转矩/力数据比例错误C217 反馈 1 数据读取错误C218 反馈 2 数据读取错误C220 反馈 1 初始化错误C221 反馈 2 初始化错误C223 最大范围输入值太高C227 模范围错误C234 编码器不能组合C235 负载侧电机编码器只可用于感应电机C236 要求反馈 1(P-0-0074)C238 编码器 2 功能错误(->S-0-0022) C241 必须为二进制编码器分辨率C242 一个参数的多重配置(->S-0-0022) C300 指令设定绝对测量C302 未安装绝对测量系统C400 切换至参数方式C401 驱动器使能时,不允许切换C402 只允许在没有上位控制时C500 复位 1 类诊断,错误复位C600 驱动器控制的回零过程指令C601 只在驱动器使能时才能够回零C602 距离回零开关-参考标记错误C604 绝对编码器不能回零C606 未探测出参考标记C700 基本参数装载C702 默认参数不可用C703 默认参数无效C704 参数不可拷贝C800 调入默认参数C801 参数默认值错误(->S-0-0021) C802 密码锁定D300 指令调整换算D301 驱动器未做好换算指令准备D302 电机转矩/力太小,无法运动D303 指令启动时驱动器处于控制状态D304 偏置计算错误D305 驱动器使能被拒绝D306 系统断电D307 驱动器不运动D308 无法调整异步电机D309 进入阶段 4D310 输入主密码D311 不能确定换算偏置D312 在换算过程中超过运动范围D500 指令获取标志位置D501 要求增量编码器D600 取消回参考点过程指令D700 轴禁止指令D701 仅可在驱动器无使能时使用轴禁止指令D800 测量轮模式指令D801 测量轮不能运行D900 自动控制环调整指令D901 启动要求驱动器使能D902 电机反馈数据无效D903 惯量检测失败D904 增益调整失败D905 位移范围无效,P-0-0166 和 P-0-0167D906 位移范围超出2.2 状态诊断信息 AA000 通讯阶段 0A001 通讯阶段 1A002 A003 A009 通讯阶段 2 通讯阶段 3 SERCOS 接口的自动波特率检测A010 驱动停止A012 控制和功率部分运行准备就绪A013 接通电源准备就绪A100 驱动器处于转矩控制模式下A101 驱动器处于速度控制模式下A102 使用编码器 1 的位置模式A103 使用编码器 2 的位置模式A104 位置模式,无滞后,编码器 1A105 位置模式,无滞后,反馈2A106 驱动器控制的插补,编码器1A107 驱动器控制的插补,编码器 2A108 驱动器控制的插补,无滞后,编码器 1A109 驱动器控制的初步,无滞后,编码器 2A110 速度同步,虚拟主驱动器A111 速度同步,真实主驱动器A112 相位同步,编码器 1, 虚拟主驱动器A113 相位同步,编码器 2. 虚拟主驱动器A114 相位同步,编码器 1. 真实主驱动器A116 相位同步,无滞后,编码器 1, 虚拟主驱动器A117 相位同步,无滞后,编码器 2, 虚拟主驱动器A118 相位同步,无滞后,编码器 1, 真实主驱动器A128 凸轮轴,编码器 1, 虚拟主驱动器A129 凸轮轴,编码器 2, 虚拟主驱动器A130 凸轮轴,编码器 1, 真实主驱动器A132 凸轮轴,无滞后,编码器 1, 虚拟主驱动器A133 凸轮轴,无滞后,编码器 2, 虚拟主驱动器A134 凸轮轴,无滞后,编码器 1, 真实主驱动器A150 驱动器控制的定位,编码器1 A151 驱动器控制的定位,编码器 1,无滞后A152 驱动器控制的定位,编码器2 A153 驱动器控制的定位,编码器 2,无滞后A154 编码器 1,驱动器受控的位置模式A155 编码器 1,无滞后,驱动器受控的位置模式 A156 编码器 2,驱动器受控的位置模式A157 编码器 2,无滞后,驱动器受控的位置模式A206 数据处理块模式,编码器1A207 数据处理块模式,无滞后,编码器1A208 正向点动模式A210 数据处理块模式,编码器2A211 数据处理块模式,无滞后,编码器2A218 负向点动模式A400 自动的驱动器检查和调整A401 驱动器减速至自动模式A402 驱动器处于自动模式A800 不明运行模式力士乐伺服驱动器故障代码故障代码C0270 故障描述电机编码器数据读取错误电机的型号参数P-0-4014 有误。
惠普彩色激光多功能打印机用户指南说明书
䐙ㄨㇸ≈
/videos/LaserJet /support/colorljM479MFP
HP Color LaserJet Pro M479 用户指南
版权与许可
© Copyright 2019 HP Development Company, L.P.
2 纸盘 .......................................................................................................................................................................................................... 17 简介 .......................................................................................................................................................................................... 17 将纸张装入纸盘 1 ................................................................................................................................................................ 18 简介 ..................................................................................................................................................................... 18 将纸张装入纸盘 1(多用途纸盘) ............................................................................................................ 18 纸盘 1 纸张方向 ............................................................................................................................................... 20 将纸张装入纸盘 2 ................................................................................................................................................................ 22 简介 ..................................................................................................................................................................... 22 将纸张装入纸盘 2 ........................................................................................................................................... 22 纸盘 2 纸张方向 ............................................................................................................................................... 24 将纸张装入纸盘 3 ................................................................................................................................................................ 26 简介 ..................................................................................................................................................................... 26Fra bibliotek商标说明
G902 G902-15 Cherry Lightweight Nut-Plate Rivete

Original InstructionsG902Cherry Lightweight Nut-Plate Riveter1224 East Warner Ave, Santa Ana, Ca 92705THE G902 / G902-15T A B L E O F C O N T E N T SDescription (1)Specifications for G902 / G902-15 (1)Safety Warnings (2)How to use G902 / G902-15 (2)Maintenance and Repair (2)Troubleshooting (2)Overhaul (3)Air Valve (3)Handle Sub-Assembly (3)Pulling Heads (3)Installing Pulling Heads (3)Cross Section Drawing Of G902 (4)Parts List for G902/G902-15 Riveters (5)Exploded View of G902 / G902-15 (6)Declaration of Conformity ...................................................................................................................................................Back CoverD E S C R I P T I O NThe G902 feed-through/G902-15 side-eject all pneumatic lightweight tools are designed specifically for the most efficient installation of blind rivets. Its durable, all metal housing makes this extremely robust tool ideal for use in rugged shop environments. This tool utilizes a straight pulling head which can install 3/32", 1/8’’ pull through type Nut-Plate and 3/32" CherryLock “A” rivets. Extensions are available for the G902 to allow the pulling heads to reach limited access areas.See the section on pulling heads for the correctpulling head part number.S P E C I F I C A T I O N S F O RG902/G902-15Cherry® Aerospace (CHERRY) policy is one ofcontinuous development. Specifications shown inthis document may be subject to change whichmay be introduced after publication. For the latestinformation always consult CHERRY®.AIR PRESSURE: 90 PSI to 110 PSI(6.2 bar to 7.6 bar)STROKE: 3/4 Inch (19 mm)PULLING FORCE: 550 Pounds (2.45 kN)@ 90 PSI (6.2 bar)CYCLE TIME: One Second approx.WEIGHT 2 Pounds (.91 kg)NOISE LEVEL 60 dB (A)VIBRATION: less than 2.5 m/s2AIR CONSUMPTION:05 SCF/Cycle (1.42 L/cycle)SAFETY WARNINGS•Operating this tool with a damaged or missing stem deflector, or using the deflector as a handle, may result in severe personal injury. Rotate the pin deflector until the aperture is facing away from the operator and other persons working in the vicinity. •Approved eye protection should be worn when operating, repairing, or overhauling this tool.•Do not use beyond the design intent.•Do not use substitute components for repair. Any modification to the tool, pulling heads, accessories or any component supplied by CHERRY®, or their representatives, shall be at the customer’s entire responsibility.CHERRY® will be pleased to advise on any proposed modification.•The tool must be maintained in a safe working condition at all times and examined at regular intervals for damage.•Before disassembling the tool for repair, refer to the maintenance instructions. All repairs shall be undertaken only by personnel trained by CHERRY®. Contact us with your training requirement.•Always disconnect the air line from the tool inlet before attempting to service, adjust, fit or remove any accessory.•Do not operate the tool when it is directed at any person.•Make sure the vent holes do not become blocked or covered and that air line hoses are always in good condition.•Do not operate the tool without the pulling head in place.•All retaining rings, screwed end caps, air fittings, trigger valves and pulling heads should be attached securely and examined at the end of each working shift•Do not pull rivet in the air.•The precautions to be used when using this tool must be explained by the customer to all operators. Any questions regarding the correct operation of the tool and operator safety should be directed to CHERRY®.•Do not pound on the rear of the tool head to force rivets into holes as this will damage the tool.HOW TO USE THE G902 / G902-15After selecting the proper pulling head and attaching it securely to the G902 or G902-15, connect the air line to the tool.Insert the rivet stem into the pulling head until the head of the rivet is in contact with the pulling head nosepiece; this will ensure full engagement between the jaws and the rivet stem and will prevent slippage.MAINTENANCE AND REPAIRThe G902 or G902-15 has been manufactured to give maximum service with minimum care.In order that this may be accomplished, the following recommendations should be followed:1. Keep excessive moisture and dirt out of air supply to prevent wear of air valve, air cylinder and air piston.2. Tool should be routinely inspected for damage or air leaks.3. Periodically tighten the threaded connection between the rear piston sub-assembly (14) and the front piston (11)(see instructions on page 3). A loose connection will result in an air leak and a loss of pulling force. TROUBLESHOOTING (see Parts List, page 5)1. Check for excessive air leakage from the air valve: If an O-ring on the valve stem (24) or on the valve sleeve (22) is worn or dam-aged, air will leak through the bottom of the handle at the exhaust port or at the front of the trigger valve.•If an O-ring (2) on valve sleeve (22) is worn or damaged, replace.•If an O-ring (23) on valve stem (24) is worn or damaged, replace.2. Check movement of the head piston rod (11). If it does not move freely or it is slow in operation:•O-rings (19), (17), (16), (12), (9), (2), (6), (2) and O-ring (17) for G902-15 may be damaged and require replacement.•Front and rear piston sub-assemblies (15 and 8) may be seized due to damaged parts and need replacement.•The Ø.094" (2.388 mm) vent holes on the side of main cylinder may be blocked or damaged; clean as necessary.3. Rivet stem sticks in the pulling head:•Pulling head needs maintenance. Disassemble the pulling head; clean and replace worn parts as needed.•Spent rivet stems are wedged inside the pistons. Disassemble the pulling head and remove jammed stems.OVERHAULThe disassembly and reassembly procedures can be accomplished by following the instructions below and the drawings on pages 4 & 6. Use extreme care during disassembly and reassembly not to mar, nick or burr any smooth surface that comes in contact with O-rings. Before installing O-rings, be sure to apply an O-ring lubricant. It is recommended that a special assembly tool, which can be ordered under part number 902-027, be used to overhaul this tool.AIR VALVE• Remove spring pin (21) by tapping it gently with a punch.• Remove the valve sub-assembly by pressing on trigger (27) from behind with both thumbs using the handle (20) for leverage, orpull and wiggle the trigger from the front. • Remove the set screw (28) from the trigger (27). • Disassemble the trigger (27) from valve stem (24). • Remove retaining ring (26).• Remove washer (25) from the counter bore of valve sleeve (22). • Pull valve stem (24) out from valve sleeve (22).HANDLE SUB-ASSEMBLY (see parts list)• Always remove the complete pulling head from the tool before attempting to dissemble the head assembly. Remove front cap sub-assembly (3) by unscrewing counterclockwise. • Remove deflector pin (31) and deflector fitting (30) (G902-15 model does not use these components). Insert a 3/16 hex wrenchthrough the back of the tool into the rear piston sub-assembly (14). • With hex wrench in place, locate the flats on the front piston rod (11). Use a 7/16 wrench, (for G902-15 model insert a pin in thecrossed drill hole of front piston rod (11)), to unscrew the front piston rod (11) by turning it counterclockwise.Note: Do not use Loctite TM when reassembling the front piston rod (11) to the rear piston sub-assembly (14); it would block the air passage. Instead, torque to about 90 in-lbs. • With the front piston rod (11) and front piston sub-assembly (3) out of the main housing, remove retaining ring (7) then push offthe front air piston sub-assembly (3) off of piston rod (11). • Remove retaining ring (10) from the main handle bore.• Use a 3/16 hex wrench to push out the rear piston sub-assembly (14) and bulk head (13).• Use plug wrench 902-027 and locate the two holes on the rear plug (18) inside the main handle bore. Unscrew the rear plug byturning the plug wrench counterclockwise.G902 / G902-15 PULLING HEADSINSTALLING H902-3NPR PULLING HEAD ON RIVETER1. Place jaws inside collet and place jaw follower in the collet against jaws. Then screw drawbar adapter onto the collet and tighten securely using wrenches on flats provided.2. Insert spring into head piston. Screw collet sub-assembly onto head piston and tighten securely using wrenches on flats provided.3. Thread tightly the proper nosepiece onto sleeve.C R O S S S E C T I O N O F G902PARTS LIST FOR THE G902 (902-15) NUT-PLATE RIVETER ASSEMBLY** NOT SOLD SEPARATELY.NOTE: ITEMS 29 TO 32 (P-880, 703A13, 530A16 AND 670A20) ARE NOT USED IN G902-15 TOOL.E X P L O D E D V I E W OF G902/G902-151224 East Warner Ave, Santa Ana, Ca 92705 Tel: 1-714-545-5511Fax: 1-714-850-6093 © 2007 Cherry AerospaceLOCTITE ® is a registered trademark of Henkel Corporation DEXRON ® is a registered trademark of GM corporation.PARKER ®is a trademark of Parker Hannifin CorporationLUBRRIPLATE ® is a trademark of Fiske Brothers Refining Co.TM-G902。
EURAdrives E100 E110 系列变频器使用手册说明书

3.1 控制面板概述.................................................................................12 3.2 控制面板及安装支架结构尺寸 ......................................................13 3.3 控制面板操作说明 .........................................................................15 3.4 参数设置方法.................................................................................15 3.5 功能码区内与区间的切换方法 ......................................................16 3.6 面板显示内容介绍 .........................................................................17
附录 5 功能码速查表 ................................................................................ 108
升级记录:................................................................................................... 128
万达广场考勤管理制度

万达广场考勤管理制度一、目的为加强万达广场全体员工的考勤管理,规范员工工作时间,保障公司运营秩序,提高工作效率,根据国家法律法规及公司相关规定,特制定万达广场考勤管理制度。
二、适用范围本制度适用于万达广场全体在岗正式员工、试用期员工及临时员工。
三、工作时间1. 工作时间:周一至周五,上午9:00-12:00,下午13:00-18:00。
周六、周日及国家法定节假日根据公司实际情况调整。
2. 休息时间:员工享有午休时间,具体时间为12:00-13:00。
3. 加班规定:因工作需要,员工需加班时,应提前向直接上级申请,经批准后方可加班。
加班时间按照国家相关规定计算。
4. 弹性工作制:部分岗位实行弹性工作制,具体工作时间由各部门根据实际情况自行安排,但不得低于国家规定的工作时间。
5. 工作时间调整:公司可根据业务发展需要,对工作时间进行调整。
调整前,应提前通知全体员工。
四、考勤制度1、每日签到制度(1)员工每日需按时签到,作为考勤依据。
(2)签到方式:采用生物识别技术(如指纹、面部识别等)进行签到。
(3)签到地点:公司指定的考勤机位置。
2、签到次数和时间(1)每日签到两次,分别为上午上班签到、下午下班签到。
(2)签到时间:上午签到时间为8:50-9:10,下午签到时间为18:00-18:20。
(3)迟到或早退超过规定时间,按迟到或早退处理。
3、因公外出未签到处理(1)因公外出未能按时签到的,需提前向直接上级报告,并在外出归来后及时补签。
(2)补签需提供外出公务的相关证明,如外出公函、会议记录等。
4、忘记签到处理(1)员工因忘记签到,应立即向直接上级汇报,并在当天内完成补签。
(2)补签需提供书面申请,经直接上级审批同意后方可进行。
(3)忘记签到超过当天,视为旷工处理。
5、考勤管理责任分配(1)人力资源部门负责制定、解释和修订考勤管理制度,并对全体员工的考勤情况进行监督和检查。
(2)各部门负责人负责本部门的考勤管理,确保员工按时签到,并对异常考勤情况进行处理。
国际工程C113引擎3.437英寸内径漏地孔应用说明书

APPLICATION: Balers: 55T, 55W, w/Block #354898R1-R4; Combines: 64, 76; Tractors: A, AV, B, BN, C, w/Block #354898R1-R4; Super A, Super AV, w/TSN #310300-356000;IH-113-E 10/16/2006QTY ITEM # DESCRIPTION LETTERED ITEMSINCLUDED IN KIT1 944169 In-Frame Kit, 3.125" Overbore (wo/Water Pump Conv) I1 945169 Out-of-Frame Kit, 3.125" Overbore (wo/Water Pump Conv) O4 141349 Sleeve & Piston Asb, 3.125" Overbore (Dome Top Pistons) O I 4 141351 Sleeve & Piston Asb, 3.125" Overbore (Flat Top Pistons)4 141352 Sleeve & Piston Asb, 3.250" Overbore4 141353 Cylinder Liner, 3.125" Overbore (Includes O-Ring)4 141354 Cylinder Liner O-Ring1 141355 Piston Ring Set, STD 3.000" Bore (3-1/8 1-1/4) 4 141357 Piston Ring Set, 3.125" Overbore (2-3/32 1-1/4)1 141358 Piston Ring Set, 3.125" Overbore (3-3/32 1-3/16)1 141359 Piston Ring Set, 3.125" Overbore (3-3/32 1-1/4)1 141362 Piston Ring Set, 3.1875" Overbore (2-3/32 1-1/4)4 141342 Piston Ring Set, 3.250" Overbore (2-3/32 1-3/16)1 141364 Piston Ring Set, 3.250" Overbore (3-3/32 1-3/16)4 241249 STD Rod Bearing O I4 241251 .002 Rod Bearing4 241252 .010 Rod Bearing4 241253 .020 Rod Bearing4 241254 .030 Rod Bearing4 241255 .040 Rod Bearing1 241256 STD Main Bearing Set O I1 241257 .002 Main Bearing Set1 241258 .010 Main Bearing Set1 241259 .020 Main Bearing Set1 241261 .030 Main Bearing Set (1)1 241262 .040 Main Bearing Set (.010 Oversize Thrust Length)1 341237 Head Gasket Set (wo/Water Pump Conv) I1 341238 Head Gasket (wo/Water Pump Conv)8 301111 Positive Valve Seal, Optional (Not in Gasket Sets) (2)1 341221 Manifold Gasket Set1 341222 Valve Cover Gasket1 341239 Full Gasket Set w/Seals (wo/Water Pump Conv) O1 341226 Timing Cover Gasket1 341225 Pan Gasket Set I1 341228 Front Crank Seal w/Wear Sleeve 1 341227 Timing Cover Gasket & Seal Kit1 341236 Rear Crank Seal Kit (Includes Seal, Gaskets & Plugs)4 241264 Pin Bushing: A, AV, B, BN #501-103614 (.980" OD) 4 241263 Pin Bushing: Except A, AV, B, BN #501-103614 (.993" OD)1 241237 Front Cam Bearing (Used on Late Blocks Only)1 241238 Distributor Drive Bushing8 741191 Rod Bolt8 741192 Rod Nut1 741193 Head Bolt Kit w/Washers1 741194 Head Stud & Nut Kit(1)For .010" Oversize Thrust Length Use 241581 (2)Use VST1711 Seal ToolIH-113-E10/16/2006QTY ITEM # DESCRIPTION LETTERED ITEMSINCLUDED IN KIT1 949525 Cam Kit C1 949128 Valve Train Kit: A, AV, B, BN Tractors V1 949337 Basic Valve Kit: Super A,Super AV,C Tractor (Exc Hd# 366299R1) B1 949336 Basic Valve Kit: Super A, Super AV, C (Hd# 366299R1) B1 949154 Valve Train Kit: Super A, Super AV, C T ractor (Kero/Dist) V1 541176 Rebuilt Camshaft1 541177 New Camshaft C1 541134 Cam Thrust Plate8 541179 Tappet C4 441236 Exhaust Valve (1.22" Hd Dia / 4.83" OAL) V 4 441238 Exhaust Valve (1.16" Hd Dia / 4.94" OAL) B4 441226 Exhaust Valve (1.31" Hd Dia / 5.28" OAL) B4 441241 Exhaust Valve, Kerosene/Distillate (1.16" Hd Dia/4.72" OAL) V4 441237 Intake Valve (1.34" Hd Dia / 4.83" OAL) V4 441239 Intake Valve (1.34" Hd Dia / 4.94" OAL) B4 441227 Intake Valve (1.50" Hd Dia / 5.28" OAL) B4 441242 Intake Valve, Kerosene/Distillate (1.34" Hd Dia / 4.72" OAL) V8 441228 Valve Guide (Also Use 441235 If Replacing Flanged Guides) V B B V 8 441243 Ex & In Spring: A, AV, B, BN Tractors V V4 441244 Exhaust Valve Spring: Super A, Super AV, C Tractor B4 441229 Exhaust Valve Spring (Used w/Cyl Head# 366299R1) B4 441243 Intake Valve Spring: Super A, Super AV, C Tractor B4 441231 Intake Valve Spring (Used w/Cyl Head# 366299R1) B8 441235 Valve Spring Seat4 441167 Valve Rotator (Original Gas or Distillate Upgrade)16 421161 Valve Keeper (Half) V B B V4 441233 LH Rocker Arm4 441234 RH Rocker Arm8 441219 Rocker Arm Adjusting Screw1 441232 Rocker Arm Shaft1 541181 Cam Gear 1 541182 Crank Gear1 541183 Governor Drive Gear8 541184 Push Rod1 641159 New Oil Pump wo/Screen 1 641161 Oil Pump Kit, w/375785R91 Pump (10T / 1.555" OD Gears) 1 641165 Oil Pump Kit, w/352085R91-R94 (6096DX Hsg/1.490" Gears)1 641162 Oil Pressure Regulating Spring1 641163 Oil Pump Screen, w/352085R94 or 375785R91 Oil Pump1 641132 Oil Pump Screen, w/352085R91-R93 Oil Pump(6096DX Hsg)1 641164 Spin-On Filter Conversion Kit (Filter not Incl)1 741188 Cam Plug (1 5/8")1 741189 Block Plug, Rear (2") 1 741195 Crankshaft Pulley1 841197 Distributor Drive Gear & Shaft1 841198 Distributor Gear (32 Teeth)1 841169 Thermostat (May Need Spacer If Not Yet Updated)1 841199 Thermostat Spacer。
揭秘消失的英国第三代垂直起降战机方案(图)11P

揭秘消失的英国第三代垂直起降战机方案[11P]采用X翼布局的P.1214-3.因其外形令人想到当时影片《星球大战》中的X-战机,因此该方案也被称为“星战战机”。
前掠翼布局的P.103方案,海狸型机尾值得注意针对美国要求设计的P.103-2方案P.1205测试模型,注意较大的可转向喷口就是PCB喷口众所周知,固定翼飞机要具备垂直起降能力需要付出很大的代价,“鹞”能够以如此简单的结构实现这种能力实在难能可贵,但是不能够进行超声速飞行是“鹞”的致命伤。
因此第二代垂直起降战斗机则以具备超声速能力为主要目标。
其中ASR.409曾经作为“鹞”GR Mk.5的第二代后续机种设计,而此后AST.410则是作为一种速度2马赫级别的垂直起降战斗机。
这一机型的资料比较稀少,大部分文件都被销毁或者处于保密状态,但是可以确定的是这两种型号是以高空高速拦截为主要目的,因此按照划代可以归类为第二代垂直起降战斗机。
在这一代垂直起降战斗机中当然还包括苏联的雅克-41。
而按照相同标准,具备垂直起降能力的、装备有大推重比发动机且中低空盘旋性能良好的战斗机,则被称为第三代垂直起降战斗机。
这一代垂直起降空战战斗机几乎可以说是具备了最美时代的外形和最复杂的结构系统,在设计上挑战最大、性能上要求最严苛,如果诞生则一定会成为航空史上的经典之作。
然而遗憾的是垂直起降飞机耗资巨大却性能有限,而且对研制国的技术水平要求很高,因此脚步非常缓慢。
第一代的“鹞”直到今天其改型还要一直服役;第二代垂直起降战斗机诞生的时候第三代常规起降战斗机已经发展到了巅峰,两者综合性能几乎不具备可比性;第三代垂直起降战斗机提出概念的时候,常规起降战斗机已经进入了以隐身为主要特征的第四代时期。
因此第三代垂直起降战斗机还在襁褓之中即夭折了,英国很快转到全新的JAS T计划中,并后来加入美国JSF计划的发展,随后第四代垂直起降战斗机F-35B诞生了。
这样就使得历史上缺失了这独特的产物——第三代垂直起降战斗机。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
ANSI/BHMA A156.3-2001
American National Standard for Exit Devices
Standard ANSI/BHMA A156.3-2001 establishes requirements for exit devices and trim,
automatic and self-latching flush bolts, removable mullions, coordinators, and carry-open bars. It includes definitions, general information and testing (procedures and equipment). Functions and types of exit devices are numbered and described, and illustrations are provided (for types only). For example, “Function 4.1” declares: In all functions, latch bolts and deadbolts, or deadbolts or latch bolts alone are released by depressing the actuating bar. Labeled Fire Exit Hardware for labeled fire doors shall not be provided with a lock down feature.
Tests and required results in this standard include:
• Inside Operational
• Flush Bolt
• Outside Operational
• Strength
• Material Evaluation
Product grades are defined by progressive performance benchmarks in the given tests, with
Grade 1 being the highest level of performance. For example, in the “outside pull test,” a Grade 1 exit device must be able to withstand 400 lbf, as compared to a Grade 3, which is required to withstand 300lbf. The last digit of the product number identifies the grade of a BHMA product.
The following are partioal descriptions of test values. See the complete standard for additional tests: TEST Grade 1 Grade 2
Grade 3 Cycle 500,000 250,000 100,000 Exit 15 lbf max. (67 N) 15 lbf max. (67 N) 15 lbf max. (67 N)
Outside Pull 400 lbf min. (1780 N) 400 lbf min. (1780 N) 300 lbf min. (1335 N) Inside Pull (Grades 1 & 2) 400 lbf min. (1780 N) 400 lbf min. (1780 N)
Push (Grades 1 & 2) 400 lbf min. (1780 N) 400 lbf min. (1780 N)
Force to Latch Door 4.5 lbf (20 N) Maximum 4.5 lbf (20 N) Maximum 4.5 lbf (20 N)
Maximum。