ABB定位器整定
ABB整定步骤
ABB定位器整定步骤
1、电气连接:+11、-12:控制信号输入端(DC4-20mA,负载电阻Max410欧姆)。
+31、-32:位置反馈输出端子(DC4-20mA,DCS+24V供电)
2、接通气源,定位器的最大供气压力为700Kpa。
3、接通DC4-20mA输入信号。
(定位器的工作电源取自输入信号,由DCS二相
制供电,不能将DC24V直接加到定位器,否则有可能损毁定位器电路)4、检查位置反馈角的安装角度,按住MODE键,并同时点击上或下键,直到显
示代码1.3出来,松开MODE,使用上或下键操作,使执行器分别运行到两终端位置,
5、切换至参数配置菜单,同时按住上和下键,点击ENTER键,等待三秒钟,
计数器从3计数到0.松开上和下键,程序进入P1.0配置菜单。
6、使用上和下键选择定位器安装形式为直行程或角行程。
7、启动自动调节程序,按住MODE键,点击上键一次或多次,直到显示P1.1,
松开MODE键,按ENTER住键三秒直到计数器倒数到0.松开ENTER键,自动调节程序开始运行,顺利结束后显示COMPLETE.
8、存储设定结果,按住MODE键,点击上键一次或多次,直到显示出P1.4,
松开MODE键,用上或下键选择NV_SAVE,若选择CANCEL,此前所做的修改则不保存,按住ENTER键三秒直到计数器倒计数结束后松开。
ABB TZID-C定位器就地标定步骤

-52
高位信号输出端子(干簧管接点输出,5---11VDC, <8 mA)
二、ABB智能定位器就地操作步骤
选择操作模式:
模式1.0:自适应控制
1、按住并保持MODE键
2、 另外按
3、显示
4、 放开MODE
5、显示
自动运行状态
模式1.1:修正控制
1、 按住并保持MODE键
2、另外按
3、显示
4、放开MODE
P4.1 POS_SW1
第一位置信号设置点
P4.2 POS_SW2
第二位置信号设置点
P4.3 SW1_ACTV
高于或低于第一位置信号时有效
P4.4 SW2_ACTV
高于或低于第二位置信号时有效
P4.5 EXIT
退出到运行操作级
P5._
ALARMS
报警功能组
P5.0 LEACKAGE
启动执行器气缸泄漏报警
手动调整
P6.0 MIN_VR
手动设置阀门全关位置
P6.1 MAX_VR
手动设置阀门全开位置
P6.2 ACTAUTOR
选择执行器型式
P6.3 SPRNG_Y2
设定执行器弹簧伸长时定位器返馈杆旋转方向
P6.4 ADJ_MODE
选择自动调整所需检测的项目
P6.5 EXIT
退出到运行操作级
P7._
CTRL_PAR
8.按ENTER键直到计时结束
9.放开ENTER键(此时标定正式开始,显示RUN等)
10.标定完成时显示COMPLETE(完成)
注:如有错误则会显示错误信息,此时要检查反馈杆等安装是否正确.
11.完成后再按一下ENTER键(如按3秒倒计时结束,就又重新开始标定)
ABB定位器说明书
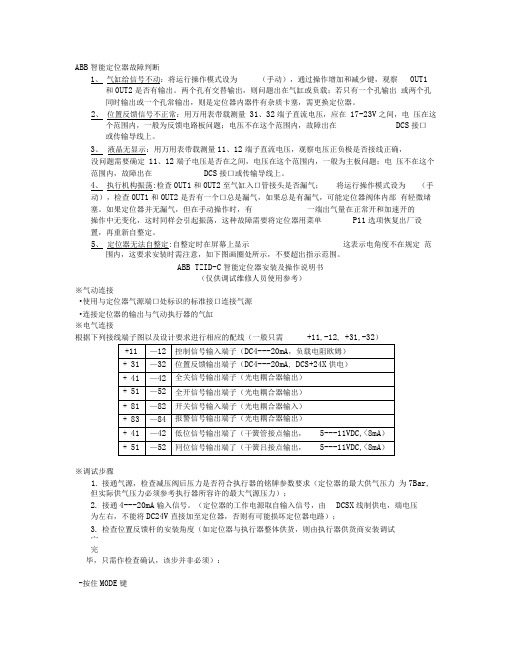
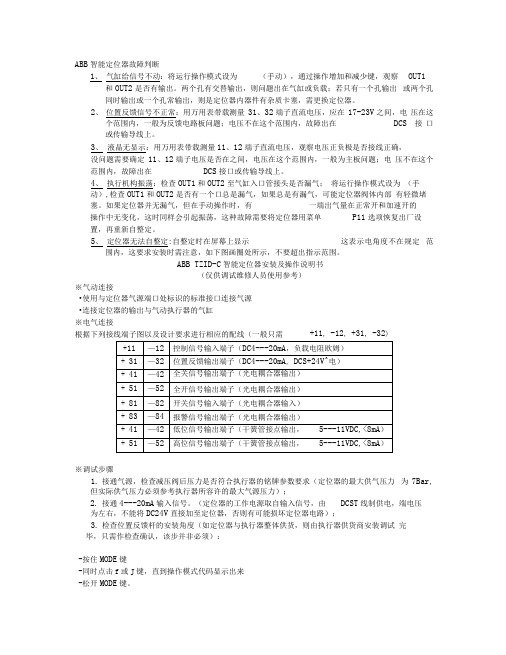
ABB智能定位器故障判断1、气缸给信号不动:将运行操作模式设为 1.3 (手动),通过操作增加和减少键,观察OUT1和OUT2是否有输出。
两个孔有交替输出,则问题出在气缸或负载;若只有一个孔输出或两个孔同时输出或一个孔常输出,则是定位器内器件有杂质卡塞,需更换定位器。
2、位置反馈信号不正常:用万用表带载测量31、32 端子直流电压,应在17-23V 之间,电压在这个范围内,一般为反馈电路板问题;电压不在这个范围内,故障出在DCS 接口或传输导线上。
3、液晶无显示:用万用表带载测量11、 12 端子直流电压,观察电压正负极是否接线正确,没问题需要确定11 、 12 端子电压是否在8.2-8.7V之间,电压在这个范围内,一般为主板问题;电压不在这个范围内,故障出在DCS接口或传输导线上。
4、执行机构振荡:检查 OUT1和 OUT2至气缸入口管接头是否漏气;将运行操作模式设为 1.3(手动),检查 OUT1和 OUT2是否有一个口总是漏气,如果总是有漏气,可能定位器阀体内部有轻微堵塞。
如果定位器并无漏气,但在手动操作时,有一端出气量在正常开和加速开的操作中无变化,这时同样会引起振荡,这种故障需要将定位器用菜单P11 选项恢复出厂设置,再重新自整定。
5、定位器无法自整定:自整定时在屏幕上显示这表示电角度不在规定范围内,这要求安装时需注意,如下图画圈处所示,不要超出指示范围。
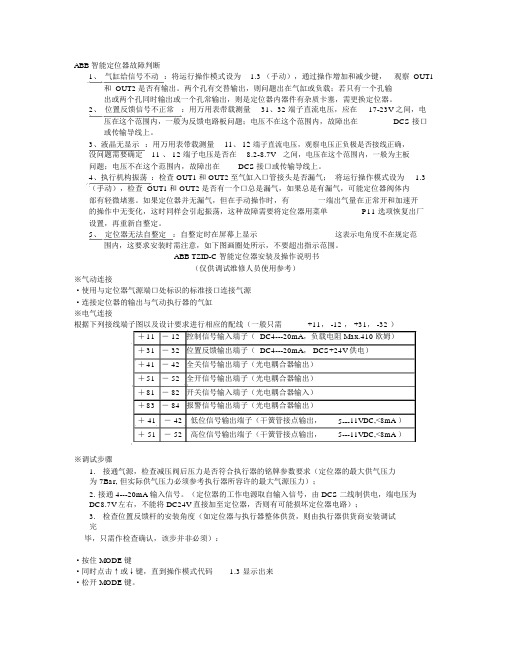
ABB TZID-C 智能定位器安装及操作说明书(仅供调试维修人员使用参考)※气动连接·使用与定位器气源端口处标识的标准接口连接气源·连接定位器的输出与气动执行器的气缸※电气连接根据下列接线端子图以及设计要求进行相应的配线(一般只需+11, -12 , +31, -32 )+11 - 12 控制信号输入端子( DC4---20mA,负载电阻 Max.410欧姆)+31 - 32 位置反馈输出端子( DC4---20mA, DCS+24V供电)+41 - 42 全关信号输出端子(光电耦合器输出)+51 - 52 全开信号输出端子(光电耦合器输出)+81 - 82 开关信号输入端子(光电耦合器输入)+83 - 84 报警信号输出端子(光电耦合器输出)+ 41- 42低位信号输出端子(干簧管接点输出,5---11VDC,<8mA )+ 51- 52高位信号输出端子(干簧管接点输出,5---11VDC,<8mA )※调试步骤1.接通气源,检查减压阀后压力是否符合执行器的铭牌参数要求(定位器的最大供气压力为 7Bar, 但实际供气压力必须参考执行器所容许的最大气源压力);2. 接通 4---20mA 输入信号。
ABB定位器说明书
实用文档ABB智能定位器故障判断1、气缸给信号不动:将运行操作模式设为 1.3(手动),通过操作增加和减少键,观察OUT1和OUT2是否有输出。
两个孔有交替输出,则问题出在气缸或负载;若只有一个孔输出或两个孔同时输出或一个孔常输出,则是定位器内器件有杂质卡塞,需更换定位器。
2、位置反馈信号不正常:用万用表带载测量31、32端子直流电压,应在17-23V之间,电压在这个范围内,一般为反馈电路板问题;电压不在这个范围内,故障出在 DCS接口或传输导线上。
3、液晶无显示:用万用表带载测量11、12端子直流电压,观察电压正负极是否接线正确,没问题需要确定11 、12端子电压是否在8.2-8.7V之间,电压在这个范围内,一般为主板问题;电压不在这个范围内,故障出在DCS接口或传输导线上。
4、执行机构振荡:检查OUT1和OUT2至气缸入口管接头是否漏气;将运行操作模式设为 1.3(手动),检查OUT1和OUT2是否有一个口总是漏气,如果总是有漏气,可能定位器阀体内部有轻微堵塞。
如果定位器并无漏气,但在手动操作时,有一端出气量在正常开和加速开的操作中无变化,这时同样会引起振荡,这种故障需要将定位器用菜单P11选项恢复出厂设置,再重新自整定。
5、定位器无法自整定:自整定时在屏幕上显示这表示电角度不在规定范围内,这要求安装时需注意,如下图画圈处所示,不要超出指示范围。
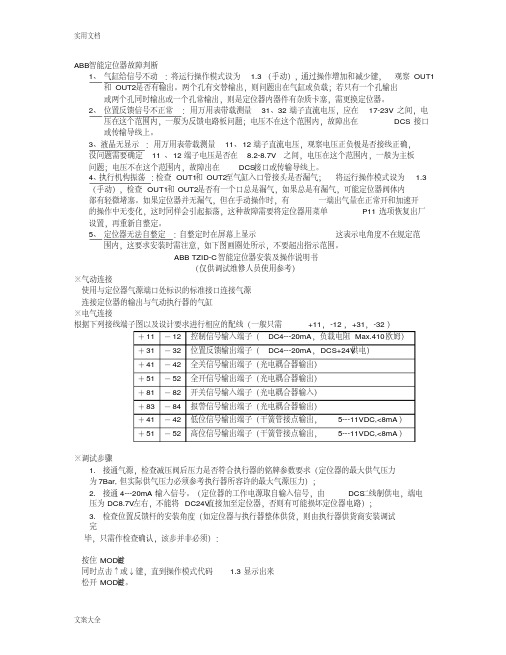
ABB TZID-C智能定位器安装及操作说明书(仅供调试维修人员使用参考)※气动连接·使用与定位器气源端口处标识的标准接口连接气源·连接定位器的输出与气动执行器的气缸※电气连接根据下列接线端子图以及设计要求进行相应的配线(一般只需+11,-12,+31,-32)+11 -12 控制信号输入端子(DC4---20mA,负载电阻Max.410欧姆)+31 -32 位置反馈输出端子(DC4---20mA,DCS+24V供电)+41 -42 全关信号输出端子(光电耦合器输出)+51 -52 全开信号输出端子(光电耦合器输出)+81 -82 开关信号输入端子(光电耦合器输入)+83 -84 报警信号输出端子(光电耦合器输出)+41 -42 低位信号输出端子(干簧管接点输出,5---11VDC,<8mA)+51 -52 高位信号输出端子(干簧管接点输出,5---11VDC,<8mA)※调试步骤1. 接通气源,检查减压阀后压力是否符合执行器的铭牌参数要求(定位器的最大供气压力为7Bar,但实际供气压力必须参考执行器所容许的最大气源压力);2. 接通4---20mA输入信号。
ABB气动执行机构定位器调试步骤

ABB气动执行机构定位器调试步骤ABB气动执行机构定位器是一种用于控制阀门开闭的装置,其主要作用是将气动执行机构的运动转换为阀门的旋转或线性运动,完成阀门的开闭动作。
在实际应用中,正确调试气动执行机构定位器是确保阀门正常运行的重要环节。
以下是ABB气动执行机构定位器调试的步骤以及注意事项。
步骤一:安全准备在调试之前,首先需要做好安全准备工作。
包括穿戴个人防护装备,如安全帽、防护眼镜和手套等。
确保所有电源和压缩空气的供应已经接通,并检查执行机构和定位器的状态是否正常。
步骤二:调整气动系统在进行调试之前,需要先进行气动系统的调整。
这主要包括调整空气压力和流量,确保气动执行机构的动力源得到充足的供应。
也需要检查阀门、过滤器和压力调节器等气动元件是否正常工作。
步骤三:安装定位器按照要求将定位器安装在气动执行机构上。
确保定位器与气动执行机构连接牢固,并且接口处无泄漏。
调整定位器的位置,使得其能够准确地感知气动执行机构的运动。
步骤四:连接电气控制系统将定位器与电气控制系统进行连接。
包括连接电源和输入输出信号线。
确保连接正确,避免短路和接线错误。
步骤五:调试定位器开始实际调试工作。
首先需要设置定位器的运动范围和动作方式。
根据阀门的要求,设置定位器的行程和速度。
然后进行手动操作,观察定位器的工作状态。
如果有异常情况,如运动不流畅或无法准确停止等,需要进行相应的调整。
步骤六:校准位置反馈定位器通常具有位置反馈功能,可以将阀门的实际位置反馈给控制系统。
在调试过程中,需要校准位置反馈。
可以通过手动操作阀门,观察反馈信号的变化,然后调整定位器的位置反馈参数,使得反馈信号与阀门的实际位置一致。
步骤七:自动调试完成手动调试后,可以进行自动调试。
通过控制系统对定位器进行远程控制,进行开关测试和位置调整。
观察阀门的动作是否准确,并调整相关参数以达到预期的效果。
步骤八:测试和调整在完成自动调试后,需要进行测试和调整。
通过开关测试和阀门操作测试,观察阀门的工作情况是否正常。
ABB智能定位器
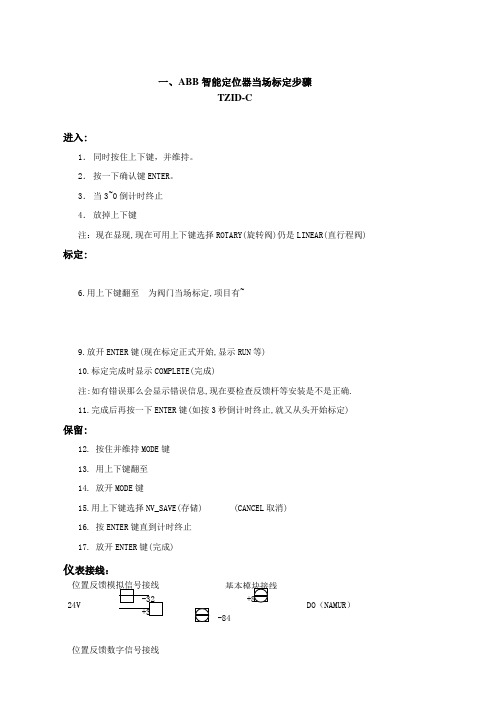
24V-84一、ABB智能定位器当场标定步骤TZID-C进入:1.同时按住上下键,并维持。
2.按一下确认键ENTER。
3.当3~0倒计时终止4.放掉上下键注:现在显现,现在可用上下键选择ROTARY(旋转阀)仍是LINEAR(直行程阀)标定:6.用上下键翻至为阀门当场标定,项目有~9.放开ENTER键(现在标定正式开始,显示RUN等)10.标定完成时显示COMPLETE(完成)注:如有错误那么会显示错误信息,现在要检查反馈杆等安装是不是正确.11.完成后再按一下ENTER键(如按3秒倒计时终止,就又从头开始标定)保留:12. 按住并维持MODE键13. 用上下键翻至14. 放开MODE键15.用上下键选择NV_SAVE(存储) (CANCEL取消)16. 按ENTER键直到计时终止17. 放开ENTER键(完成)仪表接线:位置反馈数字信号接线DO(NAMUR)SW1-52 +51 SW224V-82+11 -12二、ABB 智能定位器当场操作步骤选择操作模式:模式:自适应操纵1、 按住并维持MODE 键2、 另外按3、 显示4、 放开5、 显示自动运行状态模式:修正操纵 1、 按住并维持MODE 键切断功能接线 4~20MA 信号DI (12V )2、 另外按3、显示4、放开五、显示强制操纵正在运行模式:行程范围内手动调整 一、按住并维持MODE 键 2、 另外按 3、显示4、放开五、显示现场手动操纵方式显示的是0%~100%的阀位六、按 或 在行程范围内调整定位器模式:行程范围内手动调整 一、按住并维持MODE 键 3、 另外按 3、显示4、放开五、显示现场手动操纵方式显示的是阀门转角(注1)六、按 或 在行程范围内调整定位器注1:直行程必需在-280~280之间,角行程必需在-570~570之间。
三、阀位与行程反馈不对应解决方式如图1所示,定位器的原理是气缸的角位移通过‘中间连接件’传递给‘反馈轴’,反馈轴上的‘传动齿轮’去带动反馈电机,测得的反馈电势与输出维持平稳。
ABB定位器 自整定

ABB智能定位器调试及注意事项:打开定位器气源门。
2、向定位器提供4—20MA输入信号(端子为+11,-12)。
3、检查:(1)按下并保持MODE(2)另外短暂按下↑或↓,直到出现MODE 1.3(手动调整)(3)释放MODE(4)按下↑或↓,使执行器开关至其机械限位,并记录数值,角行程执行机构显示旋转角度。
建议限位位置:直行程执行机构>-28°并<+28°;角行程执行机构>-57°并<+57°。
最小角度为25°。
4、切换至组态模式:(1)同时按下并保持↑和↓(2)另外短暂按下ENTER(3)等待一会儿,直到3秒倒计时完成(4)释放↑和↓设备将自动返回到参数组P1._。
注意:PX.Y调节方法(同时按下并保持MODE和ENTER并保持;用↑或↓调节X / 按下并保持MODE;用↑或↓调节Y)5、选择(用↑和↓)参数P1.0 ACTUATOR/定义定位器安装形式角行程ROTARY或直行程LINEAR。
参数P2.3 ACTION/设定阀门正反作用方式反作用(REVERSE) 4~20MA对应开度100~0%或正作用(DIRECT) 4~20MA对应开度0~100%参数P3.2 ZERO_POS/起始点方向设置<预设为全关即反馈杆逆时针方向>顺时针方向关闭CLOCKW或逆时针方向关闭CTCLOCKW。
注意:以上设置必须在自动调整之前完成(即第6步)。
6、启动自动调整功能:(1)同时按下并保持MODE和ENTER(或按下并保持MODE)(2)另外短暂按下↑或↓,直到P1.1显示出来(3)释放MODE(4)按下ENTER并一直按着直到倒计时结束(5)释放ENTER,自动调整功能启动。
(6)如果显示COMPLETE,则表示“自动调整”成功,快速按下ENTER确认。
也有可能因为某种故障“自动调整”被自动取消,同时显示错误信息。
(CLOCKRUN 10 表示超程,需重调反馈杆)7、调整容许区域(tolerance band)(仅仅对于特殊用途的执行机构,比如特别小的执行机构)。
ABB定位器整定
ABB定位器调校步骤说明:1.调校步骤2.1接通气源,检查减压阀后压力是否符合执行器的铭牌参数要求。
2.2接通4~20mA输入信号。
(定位器的工作电源取自输入信号)2.3检查位置反馈杆的安装角度:2.3.1按住MODE键。
2.3.2并同时点击↑或者↓键,直到操作模式代码1.3显示出来。
2.3.3松开MODE键。
2.3.4使用↑或者↓键操作,使执行器分别运行到两个终端位置,会分别显示终端位置的角度,记录两终端角度2.3.5两个终端位置的反馈杆的安装角度应符合下列推荐角度范围:直行程应用范围在-28°------+28°之内。
角行程应用范围在-57°------+57°之内。
全行程角度应不小于25°2.3.6如果角度不在上述范围之内,将执行器先运行到一个终端位置,松开反馈杆上的连接螺丝,调整反馈杆的安装角度,从显示屏上观察,达到要求角度后紧固连接螺丝,然后操作执行器运行到另一个终端位置,检测角度,如果不符则依上述方法调整。
反复调整两个终端位置的角度直到满足要求为止。
2.4切换至配置功能级2.4.1 同时按住↑或者↓键2.4.2 点击ENTER键2.4.3 等待3秒钟,计数器从3计数到2.4.4↑或者↓键4程序自动进入P1._配置栏。
2.5使用↑或者↓键选择定位器安装形式为直行程或角行程角行程安装形式:定位器没有反馈杆,其反馈轴与执行器角位移输出轴同轴心,一般角位移为90°,如用于蝶阀,球阀的双气缸执行器直行程安装形式:定位器必须通过反馈杆驱动定位器的转动轴,一般定位器的角位移小于60°,用于驱动直行程阀门气动执行器。
我厂采用的ABB执行器为直行程安装形式,在参数P1.0里面选择:LINEARC(直行程)2.6启动自动调整程序:2.6.1 按住MODE键。
6.2 并同时点击↑键一次或多次,直到显示出2.6.3 松开MODE键。
2.6.4 按住ENTER键3秒直到计数器倒计数到02.6.5 松开ENTER键,自动调整程序开始运行。
ABB定位器的安装及校准
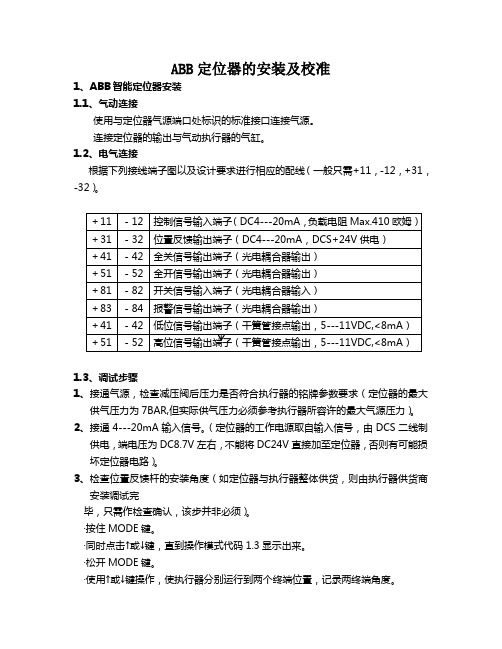
ABB定位器的安装及校准1、ABB智能定位器安装1.1、气动连接使用与定位器气源端口处标识的标准接口连接气源。
连接定位器的输出与气动执行器的气缸。
1.2、电气连接根据下列接线端子图以及设计要求进行相应的配线(一般只需+11,-12,+31,-32)。
1.3、调试步骤1、接通气源,检查减压阀后压力是否符合执行器的铭牌参数要求(定位器的最大供气压力为7BAR,但实际供气压力必须参考执行器所容许的最大气源压力)。
2、接通4---20mA输入信号。
(定位器的工作电源取自输入信号,由DCS二线制供电,端电压为DC8.7V左右,不能将DC24V直接加至定位器,否则有可能损坏定位器电路)。
3、检查位置反馈杆的安装角度(如定位器与执行器整体供货,则由执行器供货商安装调试完毕,只需作检查确认,该步并非必须)。
·按住MODE键。
·同时点击↑或↓键,直到操作模式代码1.3显示出来。
·松开MODE键。
·使用↑或↓键操作,使执行器分别运行到两个终端位置,记录两终端角度。
·两个角度应符合下列推荐角度范围(最小角位移20度;无需严格对称):直行程(小角度)应用在-28°---+28°之内。
角行程(大角度)应用在-57°---+57°之内。
全行程角度应不小于25°。
4、切换至参数配置菜单。
·同时按下↑和↓键。
·点击ENTER键,然后松开该键。
·计数器从3计数到0。
·松开↑和↓键。
程序自动进入P1.0配置菜单。
5、使用↑和↓键选择定位器运行形式为直行程或角行程。
角行程运行形式:角度变换大于-28°—+28°(56°)小于-57°—+57°(114°)。
直行程运行形式:角度变换小于-28°—+28°(56°)。
ABB定位器说明书
ABB智能定位器故障判断1、气缸给信号不动:将运行操作模式设为(手动),通过操作增加和减少键,观察0UT1和0UT2是否有输出。
两个孔有交替输出,则问题出在气缸或负载;若只有一个孔输出或两个孔同时输出或一个孔常输出,则是定位器内器件有杂质卡塞,需更换定位器。
2、位置反馈信号不正常:用万用表带载测量31、32端子直流电压,应在17-23V之间,电压在这个范围内,一般为反馈电路板问题;电压不在这个范围内,故障出在DCS接口或传输导线上。
3、液晶无显示:用万用表带载测量11、12端子直流电压,观察电压正负极是否接线正确,没问题需要确定11、12端子电压是否在之间,电压在这个范围内,一般为主板问题;电压不在这个范围内,故障出在DCS接口或传输导线上。
4、执行机构振荡:检查0UT1和0UT2至气缸入口管接头是否漏气;将运行操作模式设为(手动),检查0UT1和0UT2是否有一个口总是漏气,如果总是有漏气,可能定位器阀体内部有轻微堵塞。
如果定位器并无漏气,但在手动操作时,有一端出气量在正常开和加速开的操作中无变化,这时同样会引起振荡,这种故障需要将定位器用菜单P11选项恢复出厂设置,再重新自整定。
5、定位器无法自整定:自整定时在屏幕上显示这表示电角度不在规定范围内,这要求安装时需注意,如下图画圈处所示,不要超出指示范围。
ABB TZID-C智能定位器安装及操作说明书(仅供调试维修人员使用参考)※气动连接•使用与定位器气源端口处标识的标准接口连接气源•连接定位器的输出与气动执行器的气缸※电气连接根据下列接线端子图以及设计要求进行相应的配线(一般只需+11,-12, +31,-32)※调试步骤1.接通气源,检查减压阀后压力是否符合执行器的铭牌参数要求(定位器的最大供气压力为7Bar,但实际供气压力必须参考执行器所容许的最大气源压力);2.接通4---20mA输入信号。
(定位器的工作电源取自输入信号,由DCSX线制供电,端电压为左右,不能将DC24V直接加至定位器,否则有可能损坏定位器电路);3.检查位置反馈杆的安装角度(如定位器与执行器整体供货,则由执行器供货商安装调试宀完毕,只需作检查确认,该步并非必须):-按住M0DE键-同时点击f或J键,直到操作模式代码显示出来 -松开MODE键。
ABB阀门定位器整理调试
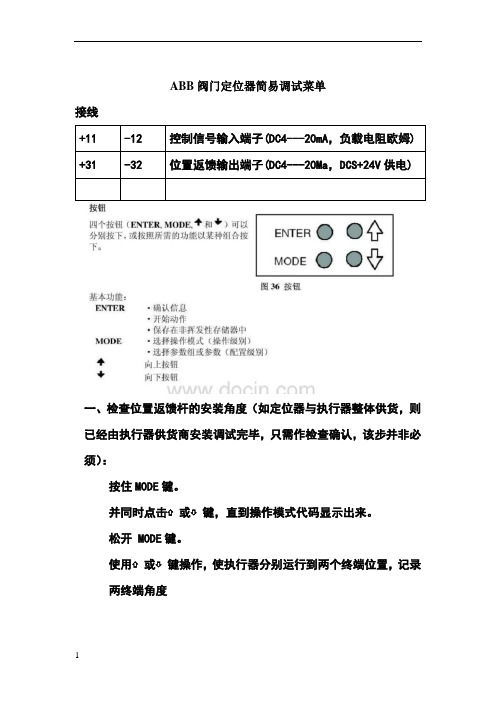
ABB阀门定位器简易调试菜单接线+11-12控制信号输入端子(DC4---20mA,负载电阻欧姆) +31-32位置返馈输出端子(DC4---20Ma,DCS+24V供电)一、检查位置返馈杆的安装角度(如定位器与执行器整体供货,则已经由执行器供货商安装调试完毕,只需作检查确认,该步并非必须):按住MODE键。
并同时点击⇧或⇩键,直到操作模式代码显示出来。
松开 MODE键。
使用⇧或⇩键操作,使执行器分别运行到两个终端位置,记录两终端角度两个角度应符合下列推荐角度范围(最小角位移20度,无需严格对称)直行程应用范围在 -28º--- +28º之内。
角行程应用范围在 -57º--- +57º之内。
全行程角度应不小于25º二:菜单切换1.切换至参数配置菜单同时按住⇧和⇩键点击ENTER键等待3秒钟,计数器从3计数到0,松开⇧和⇩键程序自动进入配置菜单(使用⇧和⇩键选择定位器安装形式为直行程或角行程。
角行程安装形式(rotary):定位器没有返馈杆,其返馈轴与执行器角位移输出轴同轴心, 一般角位移为90º直行程安装形式(linear):定位器必须通过返馈杆驱动定位器的转动轴,一般定位器的返馈杆角位移小于60º, 用于驱动直行程阀门气动执行器。
)注意:进行自动调整之前,请确认实际安装形式是否与定位器菜单所选形式相符,因为自动调整过程中定位器对执行器行程终端的定义方法不同,且线性化校正数据库不同,可能导致较大的非线性误差。
出厂时的缺省设置为:linear2、从配置功能菜单中选择第其它组参数同时按住MODE和ENTER两键点击⇧键显示器显示“ SETPOINT”松开 MODE和ENTER两键显示器显示“ MIN_PGE3、各组参数选择按住MODE,点击⇧键选择项。
存储按住MODE键点击⇧键一次或多次,直到显示出“EXIT”松开MODE键用⇧或⇩键选择 NV_SAVE (若选择‘CANCEL’,此前所作修改将不予存储。
ABB定位器

ABB定位器调试一、四个按键功能介绍ENTER : 确认信息、开始动作、保存MODE: 选择操作模式、选择参数组或参数↑:上翻键↓:下翻键二、技术参数信号范围: : 4-20 mA 或分程范围供电电压: : 8,7 VDC (非防爆)9,7 VDC (防爆)气源压力: :1. 4 ---6 bar气源的要求:仪表气体无油、无尘、无水环境温度: : -40-+85 ℃三、定位器调试--- 执行器类型选择1、同时按住“↑”和“↓”键,点击ENTER键,屏幕出现倒计时,等待三秒倒计时到0后,松开“↑”和“↓”键显示器显示P1.02、用“↑”或“↓”键选择LINEAR,(直行程)或ROTARY(角行程)。
3、按住“MODE”键,点击“↑”多次直至屏幕显示“P1.4 EXIT”时松开按键。
4、用↑”或“↓”键选择NV_SAVE,按住ENTER 键直到计数器倒计数结束后松开,修改的参数就会被保存,如果该步选择‘CANCEL’修改的参数则不会被保存。
定位器调试--- 位置反馈杆安装角度检查1、按住MODE键2、同时按↑或者↓键,直到操作模式代码“1.3 MAN_SENS”显示出来3、松开所有按键后就激活了安装角度检查操作模式4、显示屏会显示反馈杆旋转角度,按↑或者↓键检查位置反馈杆最上和最下旋转角度,应符合:直行程:-28 °至+ 28°角行程:-57°至+57°全行程总角度不低于25°5、一般出厂设置旋转角度是正常范围内的,如果检查旋转角度异常可以通过松开位置反馈杆上的锁紧螺母转动位置反馈杆到合适位置再拧紧锁紧螺母。
定位器调试--- 自动整定方法一:1、按住MODE键5秒,直到出现“ADJ_LIN”(这是直行程整定方法,角行程按住ENTER键5秒出现“ADJ_ROT”)时松开MODE键。
2、再按住MODE键直到显示器出现倒计时3、2、1、0倒计时结束后松开MODE键。
ABB定位器调校步骤
ABB定位器调校步骤步骤一:准备工作1.1检查机器人系统和工作环境,确保所有安全措施和防护设备已经启用。
1.2确保机器人和控制系统已经正确连接,并且机器人能够正常工作。
1.3确保机器人上安装的定位器和其他相关设备处于正常状态,并且没有损坏或松动。
步骤二:初始化机器人2.1打开ABB机器人控制系统,并确保机器人系统处于待机状态。
2.2进入ABB机器人控制系统的专用调校程序,并选择定位器调校模式。
步骤三:设置调校参数3.1在调校程序界面上输入相关参数,包括机器人的位置、姿态、姿态姿势和其他调校参数。
3.2根据实际需要设置定位器的精度和灵敏度参数。
步骤四:执行定位器调校4.1调整机器人的姿势和姿势姿势,使其与预定的位置和姿势完全吻合。
4.2通过调整机器人的位置和姿势,进行微调,以便定位器能够准确地读取和显示目标位置和姿势。
4.3对定位器进行校准,以确保机器人在工作时能够准确地定位和执行任务。
步骤五:验证定位器调校结果5.1使用校准后的定位器进行工作,观察机器人是否能够准确地定位和执行任务。
5.2如果发现机器人在工作中出现定位错误或执行不准确的情况,需要重新进行定位器调校。
步骤六:保存调校结果6.1将调校后的参数和数据保存到机器人控制系统的数据库中。
6.2对于多台机器人系统,需要为每台机器人保存独立的调校结果。
步骤七:定期检查和维护7.1定期检查机器人系统和定位器的状态,确保其正常运行。
7.2定期校准定位器,以确保机器人在工作中保持准确的定位和执行能力。
7.3对于长时间未使用的机器人系统,需要重新进行调校和校准,以恢复其准确的定位和执行能力。
总结:以上是ABB定位器调校的详细步骤。
定位器是机器人系统中非常重要的组成部分,能够对机器人的定位和姿态进行准确的测量和控制。
通过对定位器进行调校和校准,可以确保机器人在工作时能够准确地定位和执行任务,提高机器人系统的工作效率和精度。
在进行定位器调校时,需要严格按照操作步骤进行,保证调校的准确性和可靠性。
ABB定位器调校步骤
ABB定位器调校步骤1.调校步骤2.1接通气源,检查减压阀后压力是否符合执行器的铭牌参数要求;2.2接通4~20mA输入信号;定位器的工作电源取自输入信号;2.3检查位置反馈杆的安装角度:2.3.1按住MODE键;2.3.2并同时点击↑或者↓键,直到操作模式代码显示出来;2.3.3松开MODE键; 2.3.4使用↑或者↓键操作,使执行器分别运行到两个终端位置,会分别显示终端位置的角度,记录两终端角度2.3.5两个终端位置的反馈杆的安装角度应符合下列推荐角度范围:直行程应用范围在-28°------+28°之内;角行程应用范围在-57°------+57°之内;全行程角度应不小于25°2.3.6如果角度不在上述范围之内,将执行器先运行到一个终端位置,松开反馈杆上的连接螺丝,调整反馈杆的安装角度,从显示屏上观察,达到要求角度后紧固连接螺丝,然后操作执行器运行到另一个终端位置,检测角度,如果不符则依上述方法调整;反复调整两个终端位置的角度直到满足要求为止;2.4切换至配置功能级2.4.1同时按住↑或者↓键2.4.2点击ENTER键2.4.3等待3秒钟,计数器从3计数到02.4.4↑或者↓键程序自动进入配置栏;2.5使用↑或者↓键选择定位器安装形式为直行程或角行程角行程安装形式:定位器没有反馈杆,其反馈轴与执行器角位移输出轴同轴心,一般角位移为90°,如用于蝶阀,球阀的双气缸执行器直行程安装形式:定位器必须通过反馈杆驱动定位器的转动轴,一般定位器的角位移小于60°,用于驱动直行程阀门气动执行器;我厂采用的ABB执行器为直行程安装形式,在参数里面选择:LINEARC直行程2.6启动自动调整程序:2.6.1按住MODE键;2.6.2并同时点击↑键一次或多次,直到显示出“P1.1”;2.6.3松开MODE键;2.6.4按住ENTER键3秒直到计数器倒计数到02.6.5松开ENTER键,自动调整程序开始运行;2.6.7 自动调整顺利结束后显示器显示“COMPLETE”,点击一下ENTER表示确认; 在自动调整过程中如果遇到故障,程序将被迫终止并显示出故障代码,根据故障代码即可检查出故障原因;也可以人为的强制中断自动调整程序2.7如有必要,进入“P1.2”调整控制偏差带死区2.8如有必要,进入“P1.3”测试设定效果;2.9存储设定结果:2.9.1按住MODE键;2.9.2并同时点击↑键一次或多次,直到显示出“P1.4”;2.9.3松开MODE键;2.9.4用↑或者↓键选择NV_SAVE若选择“CANCEL”,此前所做修改不予存储2.9.5按住ENTER键3秒直到计数器倒计数到0然后松开;前面所进行的设定和自动调整中所测得的参数将存储在EEPROM中,定位器转换到先前所选择的运行级操作模式;1.10运行级操作模式的选择模式:自适应控制模式1.按住MODE键;2.并同时点击↑键一次或多次,直到显示出“CTRL_ADP”;3.松开MODE键;4.显示器显示阀位百分数,如“50% POSITION”模式:固定控制模式1.按住MODE键;2.并同时点击↑键一次或多次,直到显示出“CTRL_FIX”;3.松开MODE键;4.显示器显示阀位百分数,如“50% POSITION”模式:在执行器的实际全行程范围内手动控制1.按住MODE键;2.并同时点击↑键一次或多次,直到显示出“MANUAL”;3.松开MODE键;4.使用↑或者↓键可从现场手动操作执行器;模式:用于检测位移范围是否合适1.按住MODE键;2.并同时点击↑键一次或多次,直到显示出“MAN_SENS”;一般情况下选择模式实现远程控制,只有在执行器实际行程非常小执行器速度太快,控制发生震荡时选择控制模式,但其控制精度较低;模式和模式均可以用↑或者↓键操作执行器,但模式专用于手操,而模式专用于检测定位器反馈杆实际运行范围是否超出传感器的最大检测范围,以便于校正反馈杆的连接,取得最佳控制效果;2.11系统调校:给定位器输入4~20mADC的控制信号,执行机构应从全关到全开位,位置变送器应送出4~20mADC信号,然后至少取5点包括零点和满量程进行校验,在失去气源压力、电源、控制信号时,执行机构应保持不动;。
ABB定位器说明书

ABB智能定位器故障判断1、气缸给信号不动:将运行操作模式设为1.3(手动),通过操作增加和减少键,观察OUT1和OUT2是否有输出。
两个孔有交替输出,则问题出在气缸或负载;若只有一个孔输出或两个孔同时输出或一个孔常输出,则是定位器内器件有杂质卡塞,需更换定位器。
2、位置反馈信号不正常:用万用表带载测量31、32端子直流电压,应在17-23V之间,电压在这个范围内,一般为反馈电路板问题;电压不在这个范围内,故障出在DCS接口或传输导线上。
3、液晶无显示:用万用表带载测量11、12端子直流电压,观察电压正负极是否接线正确,没问题需要确定11、12端子电压是否在8.2-8.7V之间,电压在这个范围内,一般为主板问题;电压不在这个范围内,故障出在DCS接口或传输导线上。
4、执行机构振荡:检查OUT1和OUT2至气缸入口管接头是否漏气;将运行操作模式设为1.3(手动),检查OUT1和OUT2是否有一个口总是漏气,如果总是有漏气,可能定位器阀体内部有轻微堵塞。
如果定位器并无漏气,但在手动操作时,有一端出气量在正常开和加速开的操作中无变化,这时同样会引起振荡,这种故障需要将定位器用菜单P11选项恢复出厂设置,再重新自整定。
5、定位器无法自整定:自整定时在屏幕上显示这表示电角度不在规定范围内,这要求安装时需注意,如下图画圈处所示,不要超出指示范围。
ABBTZID-C智能定位器安装及操作说明书(仅供调试维修人员使用参考)※气动连接·使用与定位器气源端口处标识的标准接口连接气源·连接定位器的输出与气动执行器的气缸※电气连接根据下列接线端子图以及设计要求进行相应的配线(一般只需+11,-12,+31,-32)+11-12控制信号输入端子(DC4---20mA,负载电阻Max.410欧姆)+31-32位置反馈输出端子(DC4---20mA,DCS+24V供电)+41-42全关信号输出端子(光电耦合器输出)+51-52全开信号输出端子(光电耦合器输出)+81-82开关信号输入端子(光电耦合器输入)+83-84报警信号输出端子(光电耦合器输出)+41-42低位信号输出端子(干簧管接点输出,5---11VDC,<8mA)+51-52高位信号输出端子(干簧管接点输出,5---11VDC,<8mA)※调试步骤1.接通气源,检查减压阀后压力是否符合执行器的铭牌参数要求(定位器的最大供气压力为7Bar,但实际供气压力必须参考执行器所容许的最大气源压力);2.接通4---20mA输入信号。
ABB定位器调试步骤

ABB定位器调试步骤
1.定位器面板设置:
2.内部接线(4根)反馈和指令线。
3..调试前的重要参数切换方式:
①切换就地、远方按住MODE键不要松开,再点击↑↓键可以进行切换。
②用①的方式进入1.1(远方控制)1.2(就地控制)
③若要实现快开,则先按住↑键再按键↓键;实现快关,则先按住↓键再按住↑键,方可完成操作。
④用①的方式进入1.3,出现单词SENS—POS,其意思是显示调节定位器后连杆与后旋钮弧度保持在对称的范围内。
4、调试步骤
①P1.0:将↑↓键同时按,然后点击”ENTER”键,出现单词“LINEAR”调节角行程和直行程。
②P1.1:按住MODE键,点击↑↓键,进入P1。
1菜单。
常按ENTER 键3S,然后面板显示倒数计时为0后松开,就出现自整定,直到出现完成“COMPIETE"单词。
③P1.4:退出(EXIT)会显示“保存”和“不保存”,按住“ENTER”3S,则保存调试,若不保存,直接按↑键,退出到“放弃”单词,然后再按住“ENTER”3S,退出。
④P2。
3出现REVERSE单词,显示的是调节阀门和定位器的正反作用。
⑤P3.2出现CW/CCW单词,调节的是DCS和就地定位器指令的正反作用.
⑥P3.3出现EXIT单词,意思为退出。
⑦P8。
2出现DIGEET单词,则调节的是DCS和就地定位器反馈的正反作用。
以上参数为重要参数调试步骤,详情请查看说明书!。
精选ABB定位器使用维护小结

A B B定位器使用维护小结2013-1我厂炉侧ABB定位器使用较多,经过长时间使用维护,发现ABB定位器故障率较高,现图解ABB定位器,分析故障原因。
ABB定位器根据输出气源口数量分单进气和双进气两种,主要区别在于电气转换器的汽缸部分不一样,定位器的外壳基本一样,见图:单进气和双进气定位器工作原理:气源接通后,定位器接受4-20mA指令,指令与反馈在控制板比较后,将电流指令输出到定位器电气转换器的线圈,线圈产生相应强度的磁性,控制挡板与喷嘴的开度大小,喷嘴内的压力就会变化,喷嘴内压力变化又导致电气转换器的放大器汽缸产生相应的动作,控制输出气压变化,达到调节阀门目的。
图解ABB定位器:拆掉定位器外壳,去掉电路板,看到的电气转换器即IP部分:拿出IP,松开线圈部分的螺丝:IP部分外观:汽缸部分(单进气):故障原因分析:ABB定位器故障率比较高,故障现象主要有:1.定位器输出变化缓慢,执行器动作缓慢,常见于炉侧主再热蒸汽减温水调阀。
一般是输出气动作缓慢,但排气动作迅速;2.定位器完全不动作,输出压力表指针完全不变化;3.执行器动作趋势正常,但是会有一个不固定的指令反馈偏差,或者指令不变,调阀自己缓慢动作;4.执行器来回抖动,稳定不住。
经过对多个故障的定位器解题检查分析,发现汽缸故障是导致定位器故障的最常见原因,主要是膜片漏气,膜片与柱体接触部位偏斜,膜片上下动作不灵活,导致定位器汽缸动作不正常。
见图:常见故障类型对策分析:1.定位器输出动作缓慢甚至不动,但排气正常,一般都是由于进气口滤网堵塞严重(很少见),最常见的原因为定位器放大器汽缸内部故障,见上图分析内容。
2.执行器自己乱动,或者阀位与指令存在不固定的偏差,常见于二次小风门,主要原因为定位器自动控制模式选择不合适,将控制模式由修改为即可,实在不行的话可以重新整定定位器。
一般情况下选择进行远方自动控制。
只有在执行器实际行程非常小而执行器速度太快,控制发生振荡时选择控制模式,但其控制精度较低。
ABB定位器说明书
ABB智能定位器故障判断1、气缸给信号不动:将运行操作模式设为(手动),通过操作增加和减少键,观察OUT1和OUT2是否有输出。
两个孔有交替输出,则问题出在气缸或负载;若只有一个孔输出或两个孔同时输出或一个孔常输出,则是定位器内器件有杂质卡塞,需更换定位器。
2、位置反馈信号不正常:用万用表带载测量31、32端子直流电压,应在17-23V之间,电压在这个范围内,一般为反馈电路板问题;电压不在这个范围内,故障出在DCS接口或传输导线上。
3、液晶无显示:用万用表带载测量11、12端子直流电压,观察电压正负极是否接线正确,没问题需要确定11、12端子电压是否在之间,电压在这个范围内,一般为主板问题;电压不在这个范围内,故障出在DCS接口或传输导线上。
4、执行机构振荡:检查OUT1和OUT2至气缸入口管接头是否漏气;将运行操作模式设为(手动),检查OUT1和OUT2是否有一个口总是漏气,如果总是有漏气,可能定位器阀体内部有轻微堵塞。
如果定位器并无漏气,但在手动操作时,有一端出气量在正常开和加速开的操作中无变化,这时同样会引起振荡,这种故障需要将定位器用菜单P11选项恢复出厂设置,再重新自整定。
5、定位器无法自整定:自整定时在屏幕上显示这表示电角度不在规定范围内,这要求安装时需注意,如下图画圈处所示,不要超出指示范围。
ABB TZID-C智能定位器安装及操作说明书(仅供调试维修人员使用参考)※气动连接•使用与定位器气源端口处标识的标准接口连接气源•连接定位器的输出与气动执行器的气缸※电气连接+11, -12, +31, -32)根据下列接线端子图以及设计要求进行相应的配线(一般只需※调试步骤1.接通气源,检查减压阀后压力是否符合执行器的铭牌参数要求(定位器的最大供气压力为7Bar,但实际供气压力必须参考执行器所容许的最大气源压力);2.接通4---20mA输入信号。
(定位器的工作电源取自输入信号,由DCST线制供电,端电压为左右,不能将DC24V直接加至定位器,否则有可能损坏定位器电路);3.检查位置反馈杆的安装角度(如定位器与执行器整体供货,则由执行器供货商安装调试完毕,只需作检查确认,该步并非必须):-按住MODE键-同时点击f或J键,直到操作模式代码显示出来-松开MODE键。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
ABB定位器调校步骤
说明:1.调校步骤
2.1接通气源,检查减压阀后压力是否符
合执行器的铭牌参数要求。
2.2接通4~20mA输入信号。
(定位器的工作电源取自输入信号)
2.3检查位置反馈杆的安装角度:
2.3.1按住MODE键。
2.3.2并同时点击↑或者↓键,直到操作模式代码1.3显示出来。
2.3.3松开MODE键。
2.3.4使用↑或者↓键操作,使执行器分别运行到两个终端位置,会分别显示终端位置的角度,记录两终端角度
2.3.5两个终端位置的反馈杆的安装角度应符合下列推荐角度范围:
直行程应用范围在-28°------+28°之内。
角行程应用范围在-57°------+57°之内。
全行程角度应不小于25°
2.3.6如果角度不在上述范围之内,将执行器先运行到一个终端位置,松开反馈杆上的连接螺丝,调整反馈杆的安装角度,从显示屏上观察,达到要求角度后紧固连接螺丝,然后操作执行器运行到另一个终端位置,检测角度,如果不符则依上述方法调整。
反复调整两个终端位置的角度直到满足要求为止。
2.4切换至配置功能级
2.4.1 同时按住↑或者↓键
2.4.2 点击ENTER键
2.4.3 等待3秒钟,计数器从3计数到
2.4.4↑或者↓键4
程序自动进入P1._配置栏。
2.5使用↑或者↓键选择定位器安装形式为直行程或角行程
角行程安装形式:定位器没有反馈杆,其反馈轴与执行器角位移输出轴同轴心,一般角位移为90°,如用于蝶阀,球阀的双气缸执行器
直行程安装形式:定位器必须通过反馈杆驱动定位器的转动轴,一般定位器的角位移小于60°,用于驱动直行程阀门气动执行器。
我厂采用的ABB执行器为直行程安装形式,在参数P1.0里面选择:LINEARC(直行程)
2.6启动自动调整程序:
2.6.1 按住MODE键。
6.2 并同时点击↑键一次或多次,直到显示出
2.6.3 松开MODE键。
2.6.4 按住ENTER键3秒直到计数器倒计数到0
2.6.5 松开ENTER键,自动调整程序开始运行。
2.6.7 自动调整顺利结束后显示器显示“COMPLETE”,点击一下ENTER表示确认
在自动调整过程中如果遇到故障,程序将被迫终止并显示出故障代码,根据故障代码即可检查出故障原因。
也可以人为的强制中断自动调整程序
2.7如有必要,进入“P1.2”调整控制偏差带(死区)
2.8如有必要,进入“P1.3”测试设定效果。
2.9存储设定结果:
2.9.1 按住MODE键。
2.9.2 并同时点击↑键一次或多次,直到显示出“P1.4”。
2.9.3 松开MODE键。
2.9.4 用↑或者↓键选择NV_SAVE(若选择“CANCEL”,此前所做修改不予存储)2.9.5按住ENTER键3秒直到计数器倒计数到0然后松开。
前面所进行的设定和自动调整中所测得的参数将存储在EEPROM中,定位器转换到先前所选择的运行级操作模式。
1. 10运行级操作模式的选择!
1.0模式:自适应控制模式
1.按住MODE键。
2.并同时点击↑键一次或多次,直到显示出“1.0 CTRL_ADP”。
3.松开MODE键。
4.显示器显示阀位百分数,如“50% POSITION”
1.1模式:固定控制模式
1.按住MODE键。
2.并同时点击↑键一次或多次,直到显示出“1.0 CTRL_FIX”。
3.松开MODE键。
4.显示器显示阀位百分数,如“50% POSITION”
1.2模式:在执行器的实际全行程范围内手动控制
1.按住MODE键。
2.并同时点击↑键一次或多次,直到显示出“1.2 MANUAL”。
3.松开MODE键。
4.使用↑或者↓键可从现场手动操作执行器。
1.3模式:用于检测位移范围是否合适
1.按住MODE键。
2.并同时点击↑键一次或多次,直到显示出“1.3 MAN_SENS”。
5 R% h一般情况下选择1.0模式实现远程控制,只有在执行器实际行程非常小执行器速度太快,控制发生震荡时选择1.1控制模式,但其控制精度较低。
1.2模式和1.3模式均可以用↑或者↓键操作执行器,但1.2模式专用于手操,而1.3模式专用于检测定位器反馈杆实际运行范围是否超出传感器的最大检测范围,以便于校正反馈杆的连接,取得最佳控制效果。
11系统调校:
给定位器输入4~20mADC的控制信号,执行机构应从全关到全开位,位置变送器应送出4~20mADC信号,然后至少取5点(包括零点和满量程)进行校验,在失去气源压力、电源、控制信号时,执行机构应保持不动。