基于姿态传感器的检测平台设计
一种使用Qt的姿态传感器显控设计与实现

一种使用Qt的姿态传感器显控设计与实现作者:王潇卢如意李博来源:《声学与电子工程》2019年第02期摘要 为缩短软件开发周期,提出了一种在Windows 平台下基于Qt 图形用户界面设计框架的姿态传感器显控软件设计思路,通过Qt 串口控件实现显控终端与姿态传感器的指令传送及信息交互,通过Qt绘图控件实现姿态数据及图线的实时显示,并实现姿态数据的实时存储。
该方法具有信息实时显示和程序架构简单的优点,以较小的代码量实现软件全部功能需求。
关键词 Qt;串口通信;姿态传感器;显控;实时姿态传感器显控软件是连接计算机终端与传感器的桥梁,其将控制指令发送给传感器并使计算机终端接收到测量数据,使整个测量系统构成回路。
以传统的MFC( Microsoft Foundation Classes)方法开发复杂的图形界面,需要程序员编写大量的代码,对控件的实现需要调用底层的作图函数进行绘制,开发时间长。
而Qt具有跨平台性能[1],可以一次编写多处编译,具有良好的封装机制、友好的信号一槽连接事件驱动机制,并提供Qt Designer图形界面开发工具[2],可进行拖拽式的界面控件排布,便于程序开发。
本文介绍了一种使用Qt的姿态传感器显控软件设计方法,以较小的代码量以及较短的开发周期实现了计算机终端与姿态传感器的控制指令及测量信息的交互,以及测量数据实时显示保存的功能需求。
1 姿态传感器概述本文所使用的姿态传感器通过RS485串口与外部设备通信,可同时上传偏航角、俯仰角、横滚角以及温度数据,将其封装在一个15 Byte数据包中。
测量数据通信协议如表1所示。
若干个姿态传感器由下位单片机串联在RS485通信总线上,共用一个串口与显控终端通信,通过姿态传感器的通信地址寻址通信,即可同时测量一个阵列中各节点处的姿态数据,上传的测量数据即为若干个15 Byte数据包的拼接,非传感器通信地址的命令帧将不予响应。
显控软件在打开串口建立串口通信后即发送开始测量指令,串联在一起的若干个传感器即可按照给定的频率上传测量结果数据。
基于手机传感器的人体姿态识别系统设计
基于手机传感器的人体姿态识别系统设计人体姿态识别技术能够通过对人体姿势和动作的分析,实现对人体姿态的自动识别和分析。
基于手机传感器的人体姿态识别系统设计,依靠手机内置的多种传感器,如加速度计、陀螺仪和磁力计等,实现对人体姿态的实时监测和识别。
本文将介绍基于手机传感器的人体姿态识别系统的设计原理、技术架构以及应用场景。
首先,我们将讨论人体姿态识别技术的基本原理和常用算法。
然后,我们将介绍手机传感器的工作原理和常用的传感器技术。
接着,我们将详细阐述基于手机传感器的人体姿态识别系统的设计流程和关键技术。
最后,我们将探讨该系统在健康管理、运动训练、安全监控等领域的应用前景。
在人体姿态识别技术中,常用的算法包括基于机器学习的方法和基于模型的方法。
基于机器学习的方法通过对大量人体姿态数据的训练,建立分类器或回归模型,实现对人体姿态的识别。
常用的机器学习算法包括支持向量机、随机森林和深度学习等。
基于模型的方法则是通过建立人体姿态的数学模型,从图像或传感器数据中求解该模型,实现对人体姿态的估计。
常用的模型包括关节角度模型、人体骨架模型和人体动力学模型等。
手机传感器包括加速度计、陀螺仪、磁力计、GPS等多种类型。
加速度计可以测量手机在三维空间内的加速度,由于人体姿态的变化会引起手机在空间中的运动,因此可以通过加速度计获取到人体姿态的信息。
陀螺仪可以测量手机在三维空间内的旋转角速度,同样可以用于人体姿态的识别。
磁力计可以测量手机在地磁场下的方位角,这对于人体姿态的识别也有一定的帮助。
GPS则可以提供手机的位置信息,用于特定场景下的姿态识别,如室外运动训练。
基于手机传感器的人体姿态识别系统主要分为数据采集和处理两个阶段。
在数据采集阶段,手机传感器会实时采集人体姿态相关的数据,并将其保存或传输至后台服务器。
在处理阶段,系统会对采集到的数据进行预处理、特征提取和分类/回归等操作,最终得到人体姿态的识别结果。
在设计人体姿态识别系统时,需要考虑以下几个关键技术。
基于IMEMS传感器的汽车行驶姿态检测系统设计
De i n o e il tiu e e tng s se sg fv h ce a tt de d t ci y t m
ba e n I EM S s n o s d o M e s r
S e g 1。 DE in fn NG Ja — g ,HA u . n AN S e gh i DONG h n .i YANG 。 e N J nf g ,P h n .u。 e Xu
摘
要 :为 了给汽车安全 控制 系统提供准确 的行驶姿态数据 , 设计 了基 于集 成微机 电系统 (ME ) I MS 传感
器 的虚拟仪器检测系统。系统采用 I E S传感器采集车身姿态参数 , MM 在虚拟仪器平 台下对数据进行分 析 处理 , 使用卡尔曼滤波器对测量值进行估计 , 并在实车 工况下对检测 系统进行测试 。结 果表明 : 系统能 够
, ,
( . co l f l to i E gneiga dA tmain, ul nvri f lcrncT cn lg G in5 10 C ia 1 S h o o e rnc n ier n uo t G inU i syo et i eh ooy, ul 4 04, hn ; E c n o i e t E o i
16 1
传感器与微系统 ( mnd cr n c ss m T c nl i ) T sue dMi oyt eh o g s a r e oe
21 0 2年 第 3 卷 第 4期 1
基 于 I MS传 感 器 的汽 车行 驶 姿态 检 测 系统 设计 ME
邓建锋 ,韩峻峰 ,潘盛辉。 董 胜利。 杨 , , 叙
Ab t a t I r e o p o ie a c r t e il t t d a a tr o e il aey c n rl s s m , i u l s r c : n o d r t rv d c u ae v h ce at u e p r mee s fr v h ce s ft o to y t i e a v r a t isr me t ee t g s s m a e n I nt u n t ci y t b s d o MEMS s n o s d sg e . ME e s r i s d t olc e il d n e e s r i e in d An I MS s n o s u e o c l t v h ce e at u e p r mee s i h y tm. t n l ssa d p o e sn s c n u t d o h i u li sr me tpaf r t t d a a tr n t e s s i e Daa a a y i n r c si g i o d ce n t e v r a n tu n lt m. t o K l n f t ri a o td t si t h a u e n au s T e d tc ig s se i t s i e lv hc e r n i g a ma i e d pe e t y tm s e t n r a e il nn n u c n i o .T e r s l h w t a h y tm a e h e u rme t f e il t td ee t n v r el a d i o dt n i h e u t s o h t e s s s t e c n me t e r q ie n h ce at u ed tci e y w l, n t ov i o t i rl b e r a. me. S e i l e t a 1 i
基于Android 的传感器技术应用开发

目录摘要 ---------------------------------------------------------------------------------------------------------------------I ABSTRACT --------------------------------------------------------------------------------------------------------------- II引言----------------------------------------------------------------------------------------------------------------------------------------- 1 1绪论---------------------------------------------------------------------------------------------------------------------------------- 21.1研究背景与意义 ----------------------------------------------------------------------------------------------------- 2 1.2国内外智能手机应用程序现状研究 ---------------------------------------------------------------------------- 3 1.3研究目的及项目背景介绍----------------------------------------------------------------------------------------- 3 1.4论文的研究内容和结构安排-------------------------------------------------------------------------------------- 31.4.1论文内容概述 ----------------------------------------------------------------------------------------------- 31.4.2论文内容结构安排 ----------------------------------------------------------------------------------------- 4 1.5小结--------------------------------------------------------------------------------------------------------------------- 42基于Android的传感器技术研究 ----------------------------------------------------------------------------------------- 52.1Android简述 --------------------------------------------------------------------------------------------------------- 52.1.1Android平台简介------------------------------------------------------------------------------------------- 52.1.2Android开发框架------------------------------------------------------------------------------------------- 52.1.3Android应用程序组件------------------------------------------------------------------------------------- 62.1.4Android软件开发的优点及缺点------------------------------------------------------------------------- 82.1.5Basic4android开发环境的搭建-------------------------------------------------------------------------- 92.1.6运用Basic4android软件的优势 ------------------------------------------------------------------------ 10 2.2传感器概念与分类 ------------------------------------------------------------------------------------------------- 112.2.1传感器的概念 ---------------------------------------------------------------------------------------------- 112.2.2传感器的分类 ---------------------------------------------------------------------------------------------- 11 2. 3传感器在智能手机中的应用------------------------------------------------------------------------------------ 11 2. 4Android平台传感器的种类 -------------------------------------------------------------------------------------122.4.1加速传感器(重力传感器)Accelerometer --------------------------------------------------------------- 132.4.2姿态传感器Orientation ---------------------------------------------------------------------------------- 14 2. 5传感器的使用方法 ------------------------------------------------------------------------------------------------152.5.1加速度传感器的调用(PhoneAccelerometer) ---------------------------------------------------------- 152.5.2方向传感器的调用(PhoneOrientation)----------------------------------------------------------------- 15 2.6B4A-Bridge软件的使用 ------------------------------------------------------------------------------------------16 2.7小结--------------------------------------------------------------------------------------------------------------------173游戏程序设计架构详解 --------------------------------------------------------------------------------------------------------183.1程序开发背景与功能简介----------------------------------------------------------------------------------------183.1.1程序开发背景简介 ---------------------------------------------------------------------------------------- 183.1.2游戏功能简介 ---------------------------------------------------------------------------------------------- 18 3.2游戏开发平台及工作准备----------------------------------------------------------------------------------------193.2.1游戏开发平台 ---------------------------------------------------------------------------------------------- 193.2.2游戏相关素材 ---------------------------------------------------------------------------------------------- 19 3.3游戏整体详细框架 -------------------------------------------------------------------------------------------------193.3.2游戏具体包含实体模块 ---------------------------------------------------------------------------------- 213.3.3MVC设计模式介绍 --------------------------------------------------------------------------------------- 223.3.4游戏设计规划过程 ---------------------------------------------------------------------------------------- 233.3.5游戏各个模块设计详解 ---------------------------------------------------------------------------------- 23 3.4游戏设计中的状态机----------------------------------------------------------------------------------------------25 3.5小结--------------------------------------------------------------------------------------------------------------------254游戏源程序开发 ------------------------------------------------------------------------------------------------------------------264.1传感器游戏开发流程----------------------------------------------------------------------------------------------26 4.2游戏开发实现过程的主要技术实现 ---------------------------------------------------------------------------264.2.1Android静态图片的访问--------------------------------------------------------------------------------- 264.2.2Android动态图片的访问--------------------------------------------------------------------------------- 274.2.3图像色彩显示 ---------------------------------------------------------------------------------------------- 274.2.4碰撞检测实现 ---------------------------------------------------------------------------------------------- 28 4.3核心库文件的详细解读-------------------------------------------------------------------------------------------294.3.1GameView --------------------------------------------------------------------------------------------------- 294.3.2Phone -------------------------------------------------------------------------------------------------------- 304.3.3Audio --------------------------------------------------------------------------------------------------------- 32 4.4游戏测试 -------------------------------------------------------------------------------------------------------------334.4.1游戏测试环境 ---------------------------------------------------------------------------------------------- 334.4.2游戏测试结果 ---------------------------------------------------------------------------------------------- 33 4.5本章总结 -------------------------------------------------------------------------------------------------------------335总结与展望-------------------------------------------------------------------------------------------------------------------------345.1论文总结 -------------------------------------------------------------------------------------------------------------34 5. 2未来展望-------------------------------------------------------------------------------------------------------------34致谢----------------------------------------------------------------------------------------------------------------------------------------35参考文献 ---------------------------------------------------------------------------------------------------------------------------------35摘要随着科学技术的发展,人们的沟通方式发生了翻天覆地的变化,对手机的需求也不在局限于传统的语音、短信功能,而是要求成为具有越来越完备和强大的应用数据处理能力,如移动办公、网上购物、互联网游戏、地图导航、随身数字影院、在线音乐等等兼备的智能的手持终端。
飞行器姿态测量系统设计
本系统采用 Cortex-M3 为内核的 STM32F103CBT6 单片机作为微控制器,由全球首 例整合 3 轴加速度计和 3 轴陀螺仪的运动处理组件作为惯性测量单元分别感应 x 轴、 y 轴、z 轴的角速度和重力加速度。论文分析了基于姿态四元数、一阶毕卡解法的捷 联惯导姿态确定方法、基于加速度计/陀螺仪的姿态确定方法,利用 Mahony 的互补 滤波函数对 MEMS 陀螺仪随机漂移误差进行了建模和补偿。
基于九轴传感器的惯性导航模块的设计
用梯度下降算法估测IMU和MAG方向摘要:本文提出了一种新的定位算法,用于支持高效计算、可穿戴的人体惯性运动跟踪系统,用于康复应用。
它适用于由三轴陀螺仪和加速度计组成的惯性测量单元(IMUS),以及还包括三轴磁强计的磁角速度和重力(MARG)传感器阵列。
MARG的实现包括磁失真补偿。
该算法使用四元数表示,允许加速度计和磁强计数据用于解析推导和优化的梯度下降算法,以四元数导数计算陀螺仪测量误差的方向。
并对基于卡尔曼滤波的定位传感器算法进行了性能测试。
结果表明,该算法达到了基于卡尔曼滤波算法的精度匹配水平;<0.8℃的静态均方根误差,<1.7℃的动态均方根误差,计算量低和以小采样率工作的能力影响大大降低了可穿戴惯性运动跟踪所需的硬件和电源,从而能够创造出能够长期工作的轻量级、廉价系统。
1.介绍精确测量方向在一系列领域中起着关键作用,包括:航空航天、机器人、导航和人体运动分析和机器交互。
在康复治疗中,运动跟踪是一项重要的使用技术,特别是用于监测临床外环境;理想情况下,病人的活动可以连续监测,并随后得到纠正。
虽然已经为康复而进行了大量的运动跟踪工作,但还没有实现一种能够长时间记录数据的不突出的、可穿戴的系统。
现有的系统往往需要一台笔记本电脑或掌上电脑由受试者携带,由于处理,数据存储和感官设备的功率要求,这在实验室环境之外是不实际的,因此只能在短时间内获得有限的物体运动的详细数据。
在一段较长的时间内(例如一整天或甚至一周)代表一个受试者自然行为的更精确的数据将在这个领域有着重要的应用价值。
在最近的一次调查中,指出实时操作、无线特性、数据正确性和可移植性是实现临床可行系统必须解决的主要缺陷。
2.惯性导航跟踪系统虽然多种技术能够测量方位,但基于惯性的感知系统的优点是完全独立,因此测量实体既不受运动限制,也不受任何特定环境或位置的限制。
惯性测量单元(IMU)由陀螺仪和加速度计组成,能够跟踪旋转和平移运动。
基于EKF的多MEMS传感器姿态测量系统
量 $此 外 !由 于 陀 螺 信 号 的 漂 移 误 差 会 给 姿 态 解 算 的
并且!前 +个状态变Байду номын сангаас满足
精 度 带来很大的 影 响!因 此 有 必 要 对 陀 螺 的 漂 移 误 差进行实时估计$即取,
XRH A XRR A XR+ : HF
GoI
将式G+I离 散 化!利 用 YZ5[Z?滤 波 递 推 公 式]p‘
本 文 利 用 三 轴 6M6"陀 螺B三 轴 6M6"加 速 度 计B微 型 压 力 高 度 计B微 型 压 力 空 速 计 和 微 型 =T"等 多 个 传 感 器 研 制 了 一 种 应 用 于 微 小 型 飞 行 器的姿态测量系统=系统结构如图 $所示L
, 坐标系定义及方向余弦矩阵
定义地理坐标系和机体坐标系如图 *所示L在 地理坐标系中=CBDBE +个正交坐标轴分别指向 北B西B天?在 机 体 坐 标 系 中=F 轴 指 向 飞 机 纵 轴 前
&D*
其中 $A 表示在 B时间内高度变化量,
把 用 E<FG<@滤 波 方 法 得 到 的 俯 仰 角 :) 和 式
&D*得 到 的 俯 仰 角 :1 进 行 数 据 融 合!计 算 实 际 输 出
G]c>_‘b\K7RR2R6S<S<R<3N237R2@3?N2:3@<A<:R3@&N<:5732:7A1P1R<N -6M6".? <7R<3S<S 87AN73 22AR<3 -M89.? <74<3R 1P1R<N
应用于飞行器的姿态测量系统可归纳为以下 > 种K$.基 于 三 轴 陀 螺 信 号=采 用 四 元 数 的 表 示 方 法=积分求得 +个姿 态角?*.基 于三轴 加速 度计和 三轴 磁强 计=利 用 大 地 磁 场 和 重 力 场 在 地 理 坐 标 系 和机体坐标系之间的方向余弦转换进行绝对角度解
基于MPU6050的INS惯性导航和实时姿态检测系统---精品模板
基于MPU6050的INS惯性导航和实时姿态检测系统1.项目目标及功能说明1.1项目目标学习使用正点原子探索者开发板,并熟悉开发板上的MPU6050六轴传感器的工作原理和各函数的调用过程。
同时学习开发板的扩展接口,尝试在开发板上扩展蓝牙模块,并实现开发板与手机等含有蓝牙模块的电子设备通过蓝牙连接并进行数据的传输。
在完成上述内容的基础上,实现将MPU6050六轴传感器的加速度计和陀螺仪的数据传送到手机上,在手机上实现陀螺仪的变化效果展示.同时通过串口将MPU6050数据传送到电脑上,通过Matlab编程处理数据,实现惯性导航的简单展示.1.2系统功能说明系统最主要的功能有两个:一个是在手机端能够展示开发板上MPU6050陀螺仪的姿态变化,通过一个立方体的转动来表示陀螺仪的转动;另一个是在电脑端能够读取MPU6050的数据,并通过对数据的处理还原数据中存储的MPU6050的姿态变化,简单展现出惯性导航的效果。
在实现系统最主要的两个功能过程中,还需要实现一些基础功能。
开发板能够通过蓝牙与手机连接并传输数据;开发板能够通过串口将数据发送出去;在电脑端能够读取开发板上串口输出的数据等.2.需求分析●惯性导航系统用于各种运动机具中,包括飞机、潜艇、航天飞机等运输工具及导弹,然而成本及复杂性限制了其可以应用的场合。
但是,存在一种情形:卫星一旦突然因故障、敌方打击或干扰(如太阳风暴)等原因无法提供服务,这对依赖GPS、北斗等卫星导航系统作为唯一PNT(Position、Navigation、Time)信息来源的系统来说可能是致命的灾难。
作为目前为止卫星导航系统最好的备援-—惯性导航系统(INS),将于届时发挥出巨大的作用,其精度完全可以媲美GPS等卫星导航系统。
并且它不需要外部参考就可确定当前位置、方向及速度,从而使它自然地不受外界的干扰和欺骗。
定位、导航和授时服务对军队而言就像氧气对人类一样不可或缺,因此通过研究新机理、研制新设备、开发新算法,以摆脱人员和系统设备对GPS的依赖,具有极大的战略意义。
移动机器人姿态测量系统的设计
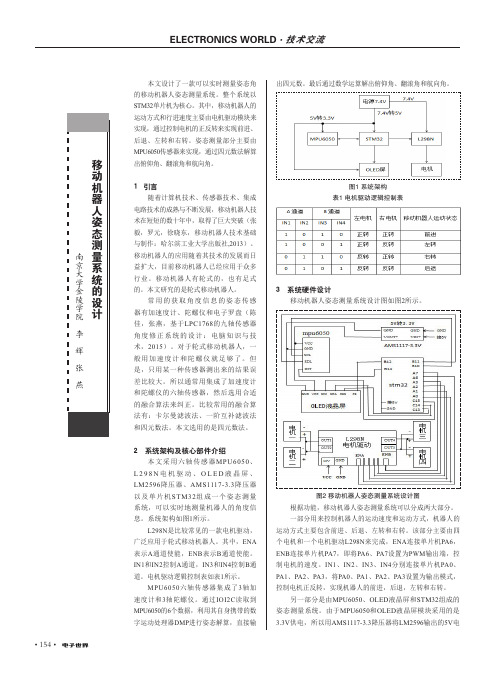
L298N电机驱动、OLED液晶屏、 LM2596降压器、AMS1117-3.3降压器 以及单片机STM32组成一个姿态测量 系统,可以实时地测量机器人的角度信 息。系统架构如图1所示。
L298N是比较常见的一款电机驱动, 广泛应用于轮式移动机器人。其中,ENA 表示A通道使能,ENB表示B通道使能。 IN1和IN2控制A通道,IN3和IN4控制B通 道。电机驱动逻辑控制表如表1所示。
1 引言 随着计算机技术、传感器技术、集成
电路技术的成熟与不断发展,移动机器人技 术在短短的数十年中,取得了巨大突破(张 毅,罗元,徐晓东,移动机器人技术基础 与制作:哈尔滨工业大学出版社,2013)。 移动机器人的应用随着其技术的发展而日 益扩大,目前移动机器人已经应用于众多 行业。移动机器人有轮式的,也有足式 的。本文研究的是轮式移动机器人。
图3 读取多个字节流程图
图4 发送多个字节流程图
5 姿态解算 常用的姿态解算方法有:卡尔曼滤波法、一阶互补滤波法、四
元数法。卡尔曼滤波法比较复杂,一般在飞行器中使用的比较多, 或者在两轮自平衡车中使用。一阶互补滤波法同样也是在两轮自平 衡车中使用的比较多,也可以用于飞行器。和其他两种方法相比, 四元数法优点是原理比较简单,缺点是运算量稍微大一些。因为本 设计选用的MPU6050传感器内置了数字运动处理器DMP,所以并 不会因为运算量大而给单片机增加负担。
图2 移动机器人姿态测量系统设计图 根据功能,移动机器人姿态测量系统可以分成两大部分。 一部分用来控制机器人的运动速度和运动方式,机器人的 运动方式主要包含前进、后退、左转和右转。该部分主要由四 个电机和一个电机驱动L298N来完成,ENA连接单片机PA6, ENB连接单片机PA7,即将PA6、PA7设置为PWM输出端,控 制电机的速度。IN1、IN2、IN3、IN4分别连接单片机PA0、 PA1、PA2、PA3,将PA0、PA1、PA2、PA3设置为输出模式, 控制电机正反转,实现机器人的前进,后退,左转和右转。 另一部分是由MPU6050、OLED液晶屏和STM32组成的 姿态测量系统。由于MPU6050和OLED液晶屏模块采用的是 3.3V供电,所以用AMS1117-3.3降压器将LM2596输出的5V电
基于三轴加速度传感器人体姿态识别的特征选择
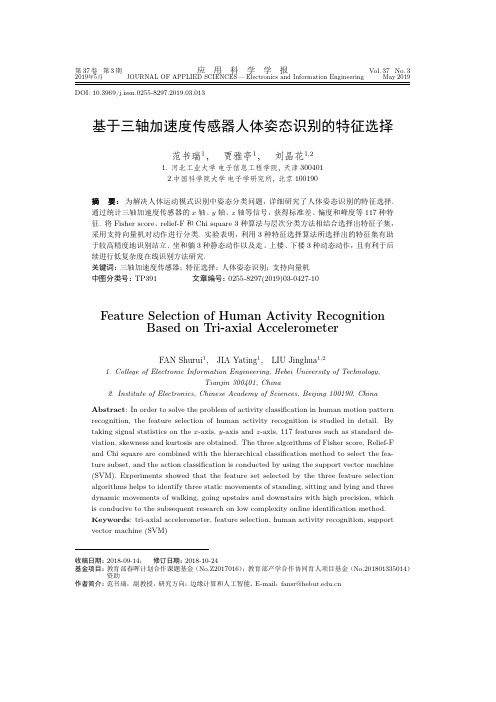
第37卷第3期2019年5月应用科学学报JOURNAL OF APPLIED SCIENCES—Electronics and Information EngineeringVol.37No.3May2019DOI:10.3969/j.issn.0255-8297.2019.03.013基于三轴加速度传感器人体姿态识别的特征选择范书瑞1,贾雅亭1,刘晶花1,21.河北工业大学电子信息工程学院,天津3004012.中国科学院大学电子学研究所,北京100190摘要:为解决人体运动模式识别中姿态分类问题,详细研究了人体姿态识别的特征选择.通过统计三轴加速度传感器的x轴、y轴、z轴等信号,获得标准差、偏度和峰度等117种特征.将Fisher score、relief-F和Chi square3种算法与层次分类方法相结合选择出特征子集,采用支持向量机对动作进行分类.实验表明,利用3种特征选择算法所选择出的特征集有助于较高精度地识别站立、坐和躺3种静态动作以及走、上楼、下楼3种动态动作,且有利于后续进行低复杂度在线识别方法研究.关键词:三轴加速度传感器;特征选择;人体姿态识别;支持向量机中图分类号:TP391文章编号:0255-8297(2019)03-0427-10Feature Selection of Human Activity RecognitionBased on Tri-axial AccelerometerFAN Shurui1,JIA Yating1,LIU Jinghua1,21.College of Electronic Information Engineering,Hebei University of Technology,Tianjin300401,China2.Institute of Electronics,Chinese Academy of Sciences,Beijing100190,ChinaAbstract:In order to solve the problem of activity classification in human motion patternrecognition,the feature selection of human activity recognition is studied in detail.Bytaking signal statistics on the x-axis,y-axis and z-axis,117features such as standard de-viation,skewness and kurtosis are obtained.The three algorithms of Fisher score,Relief-Fand Chi square are combined with the hierarchical classification method to select the fea-ture subset,and the action classification is conducted by using the support vector machine(SVM).Experiments showed that the feature set selected by the three feature selectionalgorithms helps to identify three static movements of standing,sitting and lying and threedynamic movements of walking,going upstairs and downstairs with high precision,whichis conducive to the subsequent research on low complexity online identification method.Keywords:tri-axial accelerometer,feature selection,human activity recognition,supportvector machine(SVM)收稿日期:2018-09-14;修订日期:2018-10-24基金项目:教育部春晖计划合作课题基金(No.Z2017016);教育部产学合作协同育人项目基金(No.201801335014)资助作者简介:范书瑞,副教授,研究方向:边缘计算和人工智能,E-mail:fansr@428应用科学学报第37卷随着信息科学和传感器的发展,人体行为识别技术有了极大进步.运动模式识别技术广泛应用于竞技体育[1]、健康检测[2]、医学研究和行人导航[3]等领域.采用智能手机、智能手表和智能手环等便携设备获取惯性测量单元(inertial measurement unit,IMU)与里程计(odometer, ODO)等传感器数据,并结合行为分析方法可以精准解析物体姿态和轨迹信息[4].在人机交互[5]、智能义肢[6]等应用中,姿态行为识别一直是研究热点.基于便携设备的加速度传感器行为识别技术[7-9]在老人或病人监护等领域可以低成本且实时地获得用户的行为数据,从而可以准确快速地判断出当前用户的活动情况.文献[10]采用支持向量机(support vector machine, SVM)对信号幅值面积(signal magnitude area,SMA)进行分类,但是特征过于单一.文献[11]考察了标准偏差、最大值、最小值和均方根等16种时域特征以及22种频域特征.文献[12]对17种特征进行研究,提出了一种过渡感知的人体行为识别方法.文献[13]考察了相关系数、熵、旋转角、仰角、平均值、绝对偏差、四分位数、峰度、中位数、标准差和方差等时域特征以及能量、熵和DC均值等频域特征.上述研究成果所提取的特征在用于智能手机或智能手表等资源丰富的平台上进行行为分析时能取得一定效果,但是在特征计算时复杂度高、算法执行速度低,严重影响了其行为识别的效率,限制了上述分类特征和分类方法的应用范围[14].因此在可穿戴设备和物联网节点等资源较匮乏的场景中研究姿态识别特征显得尤为重要.特征选择是根据事先明确定义的评估标准选择原始特征子集的过程,达到消除不相关和多余的特征的效果.与降维技术如线性判别分析或主成分分析相比,特征选择不会改变特征集的原始表示[15].本文在充分研究加速度传感器时域特征的基础上,采用特征选择方法寻找最优特征子集,最后采用支持向量机对分类效果进行了评估.1系统设计方案本文通过层次分类方法分析加速度信号,统计时域特征进行特征选择,优选后的特征集更能表征各种行为的突出特性.训练子集根据所选特征对SVM进行训练,得到相应的参考模型,测试子集依据参考模型采用SVM进行分类评估.姿态识别结构框架如图1所示.图1特征选择流程图Figure1Feature selection flowchart选择出特征子集后,采用监督学习方法对所选特征子集性能进行评估.多类识别一般采用多分类器融合的体系结构,有级联和并联等多种方式.本文采用级联的方式对特征进行分层次选择.将多个分类器串联在一起,每一层次的特征直接用于有监督学习模型训练与测试,为后一层次提供分类信息.这种级联方式可以根据处理器资源按需选择,尤其在远程定位追踪第3期范书瑞,等:基于三轴加速度传感器人体姿态识别的特征选择429领域,若监测到静态模式时关闭高功耗动作,监测到动态模式时启动实时定位和信息采集工作.该级联方式是一种有效的节能方法,可用于长期远程追踪.SVM 是一种有效的人类活动识别和高维数据的机器学习方法,在最大余量的类之间寻找最优分离决策超平面[16-17],具有主要的泛化能力和高度准确的结果.作为一种监督式学习技术,可分析数据并识别回归和分类应用的模式.如果两组点可以通过一个超平面在原来的维度上分开,那么它们是线性可分的;否则被认为是线性不可分的.基于风险最小化理论,SVM 可以避免神经网络的过拟合问题,在高维空间创建最大超平面以区分非重叠类.SVM 的目标是创建两个平行超平面,找到平行平面之间的最大距离.训练数据集D ={{x i ,y i }n i =1|x i ∈R d ,y i ∈{−1,+1}},在d 维空间中有n 个样本,y i 指类别,SVM 通过引入破坏边缘束缚的松弛变量ξi ,能够处理不可分的样本.松弛变量的值有3个:ξi =0指的是样本距离超平面距离至少为1/||W ||;0 ξi 1指的是样本在边缘之间;ξi 1是指样本被错误分类.SVM 以最佳性能实现此方法,定义优化的一般性分类超平面为arg min ωi ,b i ,ξi 12||W ||2+C ni =1(ξi )k受限于y i (ωT x i +b ) 1−ξi ∧ξi 0,∀x i ∈D ,其中参数C 是一个常量,用来控制最大边缘和最小损失之间的错误分类代价,n i =1(ξi )k 指的是损失.2特征选择方法人体姿态初步可以分为6种基本姿态,其中包括3种静态姿势(站姿、坐姿、卧姿)和3种动态姿势(走路、下楼、上楼).本文只对这6种姿态进行研究,而不包含姿势间的转换.为了便于直观观察不同姿态之间的差异,图2绘制了加速度信号的x 轴、y 轴、z 轴、三轴合量VSM = x 2+y 2+z 2以及SAA =|x |+|y |+|z |数据曲线.从图中可以看到,动态姿势曲线波动较大,静态相对平缓,采用均值或者方差可以区分这两种曲线;但是动态姿势之间或者静态姿势之间的区分则需要深入研究.图2三轴加速度数据Figure 2Tri-axis acceleration data常用的统计特征包括均值、方差、标准偏差和均方根等,全面准确地选择特征子集会使机器学习模型更有效[18].本文采用了22种时域统计量分别对采集到的三轴信号x 、y 、z ,以及430应用科学学报第37卷三轴合量VSM和SAA进行计算,同时考虑三轴协方差、相关系数和信号幅度区SMA,最终得到117种时域特征,如表1所示.表1时域特征标号Table1Time domain features number特征号简写描述特征号简写描述0∼4acc_Mean平均值65∼69acc_Power功率5∼9acc_Max最大值70∼74acc_RMS均方根10∼14acc_Min最小值75∼79acc_L2欧氏距离15∼19acc_Median中值80∼84acc_P10th10th百分位20∼24acc_Var方差85∼89acc_P25th25th百分位25∼29acc_Std样本标准偏差90∼94acc_P50th50th百分位30∼34acc_MAD中位数绝对偏差95∼99acc_P75th75th百分位35∼39acc_Range样本范围100∼104acc_P90th90th百分位40∼44acc_IQR四分位数105∼109acc_ent信息熵45∼49acc_Skew偏度系数110,112,114acc_COV协方差50∼54acc_Kurt峰度系数111,113,115acc_COR相关系数55∼59acc_CL曲线长度116acc_SMA信号幅度区60∼64acc_Slope斜率本文采用层次化分类方法识别多种姿态,将走路、上楼、下楼、坐、站立、躺6种姿态分为5个层次.层次1为静态和动态,其中静态包括坐、站立、躺,动态包括走路、上楼、下楼;层次2区分走路与上、下楼;层次3为上楼和下楼;层次4为站立、坐、躺;最深一个层次5是坐和躺.对每个层次分别进行特征选择,从117个特征中选择有效的特征子集:首先从层次1开始采用3种算法进行特征选择,再依次对层次2~5进行选择,以获取识别所有层次的最佳特征子集,具体过程如表2所示.表2层次识别过程Table2Level recognition procedure层次类别1类别21静态:坐、站立、躺动态:走路、上楼、下楼2走路上楼、下楼3上楼下楼4站立坐、躺5坐躺采用3种特征选择算法(Fisher score、Relief-F、Chi square)对117种特征进行评估,将特征按照得分由高到低排列组合并分别作为支持向量机的输入训练集以计算分类精度,最终从3种特征选择算法所得结果中找出一组最佳特征组合,将其输入到支持向量机中得到分类模型,并对所选特征子集的分类精度进行评估.第3期范书瑞,等:基于三轴加速度传感器人体姿态识别的特征选择431 3特征选择实验本文实验采用加利福尼亚大学欧文分校(university of California Irvine,UCI)人体行为识别数据集HARV2[12]进行数据处理及分类,采集数据来自30名年龄在19∼48岁的志愿者,所有志愿者均佩戴一款腰挂的三星Galaxy SII智能手机,并遵循统一活动协议,动作包含6个姿态:站立、坐、躺、步行、下楼和上楼.手机以50Hz对三轴加速度传感器恒定速率进行采样,所得信号首先需进行噪声滤波预处理,然后以时间窗口2.56s和1.28s平滑窗口对原始数据进行分片和统计分析,从117个时域特征中提取特征子集.3.1层次1:识别静态动作和动态动作在层次1中将6种动作分为静态动作和动态动作两类,静态动作包括坐、站立、躺,动态动作包括走路、上楼、下楼.对静态动作和动态动作进行分类识别,通过3种特征选择算法得到由特征序号组成的数组,按照特征选择方法的评分由大到小对特征进行排序,可得到特征选择曲线如图3所示,其横坐标为支持向量机所使用特征的数量,纵坐标为支持向量机分类准确度.图3层次1的特征选择曲线Figure3Feature selection curve for Level1由图3可以看出,特征选择曲线在横坐标为10时评分较高且此后趋于平稳,本文使用3种特征选择算法对应的得分最高的前10个特征,如表3所示.从表3中可以发现,这3种特征选择方法都选择了特征序号为108,105,109,38,39和35的6个特征.表3层次1特征选择排序Table3Selected features for Level1选择算法前10种特征Fisher score108,105,26,109,38,29,36,39,35,28Relief-F108,105,109,106,107,39,38,9,35,5Chi square108,105,106,39,109,116,107,38,35,64这6个特征两两组成子集,对数据训练集进行特征计算,并输入支持向量机以训练分类模型,然后使用测试集评估分类精度.采用这些特征选择支持向量机对静态和动态动作进行分类识别可达到非常高的精度,对其进行交叉验证显示,分类识别精度平均值为1.0,标准差为432应用科学学报第37卷0.这6种特征任意两两组合,对应的识别精度都能获得理想效果.其中信息熵和样本范围这两种特征能以极高的精确度区分静态和动态动作.3.2层次2:识别行走和上楼、下楼层次2是对行走和上、下楼的分类进行特征选择.将行走作为一类,而上楼和下楼作为另一类,进行一比一特征选择,结果如图4所示,在特征数量为20时3条曲线趋于平稳.图4层次2的特征选择曲线Figure4Feature selection curve for Level2选择得分最高的前20个特征如表4所示,特征序号为111,110,104,69,45,37,7,8, 102,97,38,50.进一步采用支持向量机将所选特征子集进行训练和测试.由特征集(111,110, 104,69,45,37,7,8,38)训练得到的分类精度最高,对其进行交叉验证可得精度平均值为1.0,标准差为0.由此可知,将这9种特征作为输入对支持向量机进行训练,可以较准确地识别走路与上下楼.依次减少特征时,精度逐渐降低,输入特征子集为(111,110,104,69,45,37,7, 8)和(111,110,104,69,45,37,7)时分类精度分别为0.994和0.989;输入特征子集为(111, 110,104,69,45)时分类精度为0.983,分类效果同样较理想.表4层次2的特征选择Table4Selected features for Level2选择算法前20种特征Fisher score111,110,104,90,15,85,74,69,45,29,99,37,7,24,28,27,23,4,72,76Relief-F52,54,116,47,45,51,50,111,110,48,46,49,69,64,104,53,39,9,112,113 Chi square116,52,45,51,111,110,53,7,37,102,67,48,39,72,2,82,97,87,50,693.3层次3:识别上楼和下楼在层次3中进一步对上楼和下楼进行分类,通过3种选择算法得到图5所示结果.在20个特征以后曲线趋于平缓,获得最优特征子集,如表5所示.对所选取的前20个特征进行进一步评估可得,特征子集(94,3,100,52)得到的分类精度最高能达到0.991,其标准差为0.057.特征子集(94,3,100)得到的分类精度为0.983;特征子集(94,3)得到的分类精度也能达到0.973,其标准差为0.057.第3期范书瑞,等:基于三轴加速度传感器人体姿态识别的特征选择433图5层次3的特征选择曲线Figure5Feature selection curve for Level3表5层次3的特征选择Table5Selected features for Level3选择算法前20种特征代号Fisher score25,5,100,20,28,35,55,89,58,23,78,75,103,94,19,59,79,38,77,84Relief-F52,51,47,116,50,35,100,53,46,5,69,39,38,89,103,94,19,65,84,54 Chi square116,52,47,51,46,64,49,39,62,35,48,38,63,60,45,24,5,100,40,873.4层次4:识别躺和坐、站立在动态动作分类完成的基础上,本实验继续对3种静态动作进行区分,在层次4中将躺和坐、站立进行分类识别,使用3种特征选择算法,得到图6所示特征选择曲线.图6层次4特征选择曲线Figure6Feature selection curve for Level4从特征数为2开始,Fisher score算法曲线一直维持平稳,Relief-F和Chi square曲线在选取5个特征时有凹陷,后续保持平稳.选取每种方法得分数最高的5个特征进行进一步评估,如表6所示.434应用科学学报第37卷特征子集(0,116)作为支持向量机的输入特征时,对躺和坐、站立进行分类得到的精度非常高,对其进行交叉验证得到精度平均值为0.966,其标准差为0.084,与其他特征子集相比这组特征子集较为有效.表6层次4的特征选择Table6Selected features for Level4特征选择算法前5种特征代号Fisher score70,0,90,15,95Relief-F65,85,90,15,0Chi square116,65,66,10,803.5层次5:识别坐和站立在层次5中对坐和站立进行了分类识别,得到图7所示的特征选择曲线.Chi square和Relief-F在选择前5个特征时上升较快,之后基本趋于平缓;而Fisher score对应曲线在10个特征后才能维持稳定,同时观察到3条曲线趋于稳定后均有轻微的起伏变化.为确保选择到最优特征,对每种算法得分最高的前25个特征进行分析,如表7所示.由这3种特征选择算法得到共同的特征为102,97,72,7,2,92,17,87,82,12,81,1,101,71和16,采用支持向量机对特征子集进行评估.图7层次5的特征选择曲线Figure7Feature selection curve for Level5表7层次5的特征选择Table7Selected features for level5选择算法前25种特征代号Fisher score3,93,18,68,73,88,98,102,97,72,7,2,92,17,87,82,67,12,103,83,81,1,101,71,16 Relief-F116,69,17,92,97,2,102,72,87,82,7,12,106,16,91,1,86,71,96,81,101,11,6,105,112 Chi square50,12,82,87,92,17,2,72,97,102,7,53,67,81,11,1,101,91,16,86,6,71,96,116,106特征子集(102,97,72,2)得到的分类精度为0.984,依次去掉特征72和2形成特征子集(102,97,72)和(102,97)所得精度也能达到0.976和0.967,效果比较理想.而采用特征第3期范书瑞,等:基于三轴加速度传感器人体姿态识别的特征选择435集(1,102)时,对其交叉验证得到精度平均值为1.0,标准差为0,其分类效果最佳,对坐和站立的识别可以达到很高的精度.4结语对加速度传感器数据进行研究有助于提高人体姿态识别的精度.本文采用层次分类法对每个层次分别进行特征选择,对第1层进行特征选择可知信息熵和样本范围,可以准确地识别静态动作和动态动作.对第2层进行特征选择得到相关系数、协方差、功率以及偏态等9种特征,能够较高精度地识别走路和上、下楼.对第3层进行特征选择得到50%分位数、90%分位数和平均值,这3种特征可以较精确地识别上楼和下楼.对第4层进行特征选择得到的特征SMA可以很高精度地识别躺和坐、站立.最后对第5层进行特征选择,得到90%分位数和y 轴平均值这两种特征,可用于高精度地识别坐和站立两种动作.实验最终表明本文采用的Fisher score、Relief-F和Chi square特征选择方法对117个时域特征进行选择,获得最优的特征子集,适用于支持向量机层次分类法,所得特征相比于其他特征可以更精确地识别这6种基本动作,而对于单层次采用多特征对多姿态的识别有待进一步研究.参考文献:[1]Franchino P,Anana V R,Deepak K.Wearable movement sensors for rehabilitation:a fo-cused review of technological and clinical advances[J].Innovations Influencing Physical Medicine and Rehabilitation,2018,10(9):220-232.[2]Clayton R P,Danilo R P,Silke A T W,Christian H,Victor H C A,Joao P P.Asurvey on computer-assisted Parkinson’s disease diagnosis[J].Artificial Intelligence in Medicine, 2019,95(4):48-63.[3]Morales J,Akopian D.Physical activity recognition by smartphones a survey[J].Biocy-bernetics and Biomedical Engineering,2017,37(4):388-400.[4]莫悠,钟若飞,张振鑫.移动与定点扫描结合的室内点云数据获取方法[J].应用科学学报,2018,36(5):756-764.Mo Y,Zhong R F,Zhang Z X.Acquisition of indoor laser point clouds based on mobile and terrestrial scanning[J].Journal of Applied Sciences,2018,36(5):756-764.(in Chinese)[5]Kumari P,Mathew L,Syal P.Increasing trend of wearables and multimodal interface forhuman activity monitoring:a review[J].Biosensors and Bioelectronics,2017,90:298-307. [6]赵晓东,刘作军,陈玲玲,杨鹏.下肢假肢穿戴者跑动步态识别方法[J].浙江大学学报(工学版),2018,52(10):1980-1988.Zhao X D,Liu Z J,Chen L L,Yang P.Approach of running gait recognition for lower limb amputees[J].Journal of Zhejiang University(Engineering Science),2018,52(10):1980-1988.(in Chinese)[7]王永雄,陈晗,尹钟,喻洪流,孟巧玲.基于惯导信息的人体动作和路况识别[J].生物医学工程学杂志,2018,35(4):621-630.Wang Y X,Chen H,Yin Z,Yu H L,Meng Q L.Human action and road condition recognition based on the inertial information[J].Journal of Biomedical Engineering,2018, 35(4):621-630.(in Chinese)[8]孙子文,李松,孙晓雯.基于D-S证据理论的人体跌倒检测方法[J].计算机工程与科学,2018,40(5):829-835.Sun Z W,Li S,Sun X W.A human fall detection method based on D-S evidence theory[J].Computer Engineering&Science,2018,40(5):829-835.(in Chinese)[9]蔡雅薇,谭晓阳.弱监督任意姿态人体检测[J].计算机科学与探索,2017,11(4):587-598.Cai Y W,Tan X Y.Weakly supervised human body detection under arbitrary poses[J].Journal of Frontiers of Computer Science and Technology,2017,11(4):587-598.(in Chinese)436应用科学学报第37卷[10]Thanh H.N,Ty P P,Cuong Q N,Thanh T N.A SVM algorithm for investigation oftri-accelerometer based falling data[J].American Journal of Signal Processing,2016,6(2): 56-65.[11]Kaori F.On-body smartphone localization with an accelerometer[J].Information,2016,21(7):1-23.[12]Jorge-Lr O,Luca O,Albert S,Xavier P,Davide A.Transition-aware human activityrecognition using smartphones[J].Neurocomputing,2016,171:754-767.[13]Sztyler T,Stuckenschmidt H,Petrich W.Position-aware activity recognition with wear-able devices[J].Pervasive and Mobile Computing,2017,38:281-295.[14]Morales J,Akopian D.Physical activity recognition by smartphones,a survey[J].Biocy-bernetics and Biomedical Engineering,2017,37(3):388-400.[15]San S R,Montero J M,Barrac R,Fernandof,Manuel P.Feature extraction fromsmartphone inertial signals for human activity segmentation[J].Signal Processing,2016,120: 359-372.[16]Adil M K,Ali T,Asadm K,Teemu L.Activity recognition on smartphones via sensor-fusionand KDA-based SVMs[J].International Journal of Distributed Sensor Networks,2014,503291: 1-14.[17]熊邦书,刘雨,莫燕,黄建萍,李新民.基于SVM的直升机飞行状态识别[J].应用科学学报,2016,34(7):469-474.Xiong B S,Liu Y,Mo Y,Huang J P,Li X M.Recognition of helicopter flight condition based on support vector machine[J].Journal of Applied Sciences,2016,34(7):469-474.(in Chinese)[18]Wang Z L,Wu D H,Chen J M,Ghoneim A,Hossain M A.A triaxle accelerometer-basedhuman activity recognition via EEMD-based features and game-theory-based feature selection [J].IEEE Sensors Journal,2016,16(9):3198-3207.(编辑:管玉娟)。
基于MEMS加速度传感器的人体姿态检测技术

基于MEMS加速度传感器的人体姿态检测技术一、本文概述随着科技的不断进步和物联网技术的快速发展,人体姿态检测技术已成为智能设备、人机交互、康复医疗等多个领域的研究热点。
基于微机电系统(MEMS)加速度传感器的人体姿态检测技术,因其体积小、功耗低、集成度高等优势,受到广泛关注。
本文旨在探讨基于MEMS加速度传感器的人体姿态检测技术的原理、发展现状、应用领域以及未来发展趋势,为相关研究和应用提供参考。
本文将对基于MEMS加速度传感器的人体姿态检测技术的基本原理进行介绍,包括加速度传感器的工作原理、人体姿态的表示方法以及如何通过加速度数据解算人体姿态等。
接着,文章将综述目前国内外在该领域的研究现状,分析不同技术的优缺点,并探讨未来的发展方向。
本文还将重点关注基于MEMS加速度传感器的人体姿态检测技术在各个领域的应用情况,如智能穿戴设备、虚拟现实增强现实、智能家居、运动分析、康复医疗等。
通过对这些应用案例的深入分析,展示该技术的实用价值和广阔前景。
本文将对基于MEMS加速度传感器的人体姿态检测技术的未来发展进行展望,提出可能的研究方向和技术挑战,为相关领域的科研工作者和从业者提供有益的思路和参考。
二、加速度传感器的基本原理与特性加速度传感器,作为现代MEMS(微机电系统)技术的重要组成部分,广泛应用于各种领域,特别是在人体姿态检测技术中扮演着关键角色。
本节将深入探讨加速度传感器的工作原理及其在人体姿态检测中的特性。
加速度传感器基于牛顿第二定律,即力等于质量乘以加速度(Fma)。
当传感器受到加速度作用时,内部的质量块会受到相应的力,导致传感器内部的电容、电阻或压电材料发生变化。
这种变化通过传感器转换为电信号,从而测量加速度。
MEMS加速度传感器采用微机电系统技术,将微型机械结构、传感器、电路等集成在一个芯片上。
这些传感器体积小、成本低、功耗低,非常适合用于便携式设备,如智能手机、智能手表和健康监测设备。
灵敏度:传感器对加速度变化的响应能力。
考虑设计姿态辅助IMU/_ODO_的轨道不平顺检测算法
ê φ ny ú .
(5)
ê ú
êë φ nz úû
使用轨道设计姿态信息 α design = [ p d r d y d ] T
作为虚拟观测值,得姿态观测方程:
α design - α INS = A α,3 × 3 ·φn + e α ,
A α,3 × 3 =
é - cos p^ cos y^
n′
c y^ c p^
s ^r s y^ - s p^ c ^r c γ^ ú . (4)
C b = ê c ^r s y^ + s p^ s ^r c y^
ê
ú
ê - s ^r c p^
ú
s p^
c ^r c p^
ë
û
式(3) 、(4) 代入式(2) ,经化简对比可以得到姿
态角误差与平台失准角之间的关系( 式(5) ) .具体过
Constraints,NHC) 的假设,则其载体系下的侧向和垂
向速度可认为是零;轨检小车的前向速度可由装配
其上的里程计获得.考虑到 IMU 安装角为小角度,结
合 NHC 和里程计, b 系下速度车辆速度为
李松伟,等.考虑设计姿态辅助 IMU / ODO 的轨道不平顺检测算法.
122
LI Songwei,et al.Design attitude assisted IMU / ODO approach for track irregularity detection.
从事空 间 大 地 测 量 方 面 的 研 究. chxyqsb @
126.com
1 信息工程大学 地理空间信息学院,郑州,
450001
统( Inertial Navigation System,INS) / 里程计( Odometer,ODO) 轨道检测
基于MEMS传感器的姿态检测系统
基于MEMS传感器的姿态检测系统王窕丽;孙玉国【摘要】基于MEMS传感器设计了一种姿态检测系统,通过MEMS传感器获取角速度、加速度等信息,利用硬件对采集的数据进行滤波处理,实现目标物体运动过程中姿态角的测量.采用互补滤波对数据进行融合,有效消除了噪声干扰,提高了系统的检测精度.无线模块的应用实现了下位机与上位机的同步,实时显示目标物体的运动姿态.实验表明,该系统具有较高的测量精度及良好的实时显示效果.【期刊名称】《电子科技》【年(卷),期】2015(028)010【总页数】4页(P86-89)【关键词】姿态检测;单片机;MEMS;无线模块【作者】王窕丽;孙玉国【作者单位】上海理工大学光电信息与计算机工程学院,上海200093;上海理工大学光电信息与计算机工程学院,上海200093【正文语种】中文【中图分类】TP212.9;TP274+.5在车辆船舶的倾斜测量、机器人平衡姿态检测、飞行器惯性测量系统等许多方面都需要测量物体的姿态信息。
随着军事科技的不断发展,姿态测量系统在无人机领域也得到了广泛应用[1]。
姿态检测根据信息输入源的不同可分为两类:一类是通过外部信息源输入,通常采用摄像机、测距仪、超声波模块等外部传感设备;另一类是将加速度计、陀螺仪及电子罗盘等集成于目标物体内部,提供测量信息,称其为内部信息源。
内部信息源传感器多数采用MEMS技术研制,具有抗冲击能力强、可靠性高、寿命长、成本低等优点[2]。
加速度计具有良好的静态特性,但是动态响应慢,不适合动态角度运动的跟踪测量;陀螺仪动态性能表现良好,但存在漂移误差,且随着时间累积而增大。
若将加速度计和陀螺仪结合使用,将两者采集的数据进行融合,不仅可提高动态性能,且消除偏移,使得测量的角度与实际角度更加吻合。
本文基于此理论,搭建了姿态检测系统,实时准确的检测出物体当前姿态,具有独立、简单、易用的特点,且有较好的实用性。
物体在地球上受到重力作用会产生加速度,加速度传感器可用来测量其值。
基于STM32的电子计步器的设计与实现

基于STM32的电子计步器的设计与实现随着生活节奏的不断加快,留给人们的锻炼时间越来越少,走路和跑步成为人们日常生活中为数不多的运动之一。
计步器携带方便,能很好地完成量化运动量的目标。
因此,最近几年各种计步器以及计步软件大量出现。
鉴于人们对于步数检测准确度的要求以及使用便利的需求,十分有必要设计一套计步算法并应用于相关的计步器。
本设计的研究目的是设计出一款高精度、便携的计步器。
本设计的主要难点在于数据滤波算法以及计步检测算法的研究。
首先,本设计分析了几种数据滤波的方法,选择了比较适合的卡尔曼滤波算法。
接着,分析了现有的几种计步检测算法,包括动态阈值算法和峰值检测算法。
发现这些算法都不是很准确,所以本文设计了一种新的计步检测算法,提高了计步检测的精度,为其他研究者在步数检测方面提供了一种较好的解决方案。
最后,本设计还采用了TFT彩屏的人机交互界面,可以实时显示卡路里、时间以及步数。
通过实际调试过程中的不断改进,实现了计步器的准确检测。
关键词:计步器MEMS传感器滤波步数检测目录1 绪论 (1)1.1 研究背景和意义 (1)1.2 国内外研究现状 (1)1.3 章节安排 (2)2 系统总体设计方案 (3)2.1 设计目标 (3)2.2 系统架构分析 (3)2.3 系统方案分析 (3)2.3.1 佩戴位置选择 (3)2.3.2 MEMS惯性传感器的数据读取 (4)2.3.3 数据融合与滤波 (5)2.3.4 计步算法 (8)3 系统硬件设计 (9)3.1 系统硬件电路总体设计 (9)3.2 单片机最小系统设计 (9)3.3 MEMS传感器 (10)3.4其他外围电路 (11)3.4.1 电源转换 (11)3.4.2 TFT彩屏电路 (11)3.4.3 无线串口通信 (12)4 系统软件设计 (13)4.1 系统软件总体设计 (13)4.2中断设计 (14)4.2.1 定时器中断 (14)4.2.2 串口中断 (15)4.2.3 中断优先级判断 (16)4.3 MPU6050原始数据采集 (16)4.3.1 陀螺仪和加速度计的配置工作 (16)4.3.2 串行口的配置工作 (17)4.3.3 IIC读取姿态传感器数据 (17)4.4 数据处理 (18)4.4.1 数据类型统一 (18)4.4.2 卡尔曼滤波 (19)4.5 计步算法 (21)4.6 无线串口通信 (22)5 系统调试 (23)5.1 系统调试上位机 (23)5.2 标定MPU6050零点 (23)5.3 卡尔曼滤波参数调试 (23)5.4 计步测试 (24)6 总结与展望 (25)6.1 总结 (25)6.2 展望 (25)6.3 课题研究对环境以及社会的影响 (26)附录 (27)附录一系统硬件原理图和PCB (27)附录二系统实物图 (28)附录三系统核心 (28)1 绪论1.1 研究背景和意义随着社会不断进步以及生活水平不断提高,人们逐渐开始重视自身的健康。
船舶稳定平台解决方案

船舶稳定平台解决方案陀螺稳定平台〔gyroscope-stabilized platform〕利用陀螺仪特性保持平台台体方位稳定的装置。
简称陀螺平台、惯性平台。
用来测量运动载体姿态,并为测量载体线加速度建立参考坐标系,或用于稳定载体上的某些设备。
它是导弹、航天器、飞机和舰船等的惯性制导系统和惯性导航系统的主要装置。
稳定平台作为一种安放在运动物体上的设备,具有隔离运动物体扰动的功能。
稳定平台在航空航天、工业控制、军用及商用船舶中都有比拟广泛的用途,例如航拍、舰载导弹发射台、船载卫星接收天线等。
船舶上工作面或者平台姿态检测,船载天线稳定平台系统,会应用倾角传感器定时〔较长时间〕读取数值,通过计算后,对稳定平台进展校正。
平台的实际运动由单片机控制外部机械装置以到达对稳定水平平台进展修正,以保证其始终处于水平状态。
某些倾角传感器作为船体液压调平系统中的反响元件,提供高精度的倾角信号。
既可用于水下钻进也可用于水下开采等。
在国外,陀螺稳定跟踪装置被广泛应用于地基、车载、舰载、机载、弹载以及各种航天设备中。
20世纪40年代末,为了减少车体振动对行进间射击的影响,在坦克上开场安装火炮稳定器,从50年代起,双稳定器在坦克中得到了广泛的应用。
在英、美等国的先进武器系统中,基于微惯性传感器的稳定跟踪平台得到了广泛的应用,如美国的M1坦克、英国“挑战者〞坦克、俄罗斯T-82坦克、英国“标枪〞导弹海上发射平台和“海枭〞船用红外跟踪稳定平台等,都采用了不同类型的稳定跟踪平台。
美国海军采用BEI电子公司生产的QRS-10型石英音叉陀螺,研制出WSC-6型卫星通讯系统的舰载天线稳定系统,工作12万小时尚未出现故障;Honeywell公司以红外传感器平台稳定为应用背景,研制的以GG1320环形激光陀螺为根底的惯性姿态控制装置,很好的满足了稳瞄跟踪系统的要求。
美军配装的Honeywell公司采用激光陀螺技术研制的自行榴弹炮组件式方位位置惯性系统(MAPS6000) ,在工作时可连续提供高精度的方位基准、高程、纵摇、横摇、角速率、经度和纬度输出,性能大大高于美军MAPS系统标准的要求。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
收稿日期:2016-10-11作者简介:白万民(1959 -),男,陕西人,教授,硕士,研究方向为计算机应用技术。
基于姿态传感器的检测平台设计Design of the detection platform based on the attitude sensor白万民,赵传超,荆 波BAI Wan-min, ZHAO Chuan-chao, JING Bo(西安工业大学,西安 710021)摘 要:针对姿态传感器应用在自行火炮的高精度和高可靠性要求,利用AutoCAD软件和SolidWorks软件对平台组成结构和相关零件进行设计、建模与装配。
对整体进行完整的分析,证明检测平台机械结构设计的合理性。
利用AT89C52单片机为核心控制芯片,编码器为核心检测元件电路设计方案;运用AltiumDesigner10画图软件完成平台系统整体硬件电路原理图的设计,实现姿态传感器测量值与编码器输出信号的采集、转换和显示,实现对姿态传感器高精度检测。
关键词:检测平台;姿态传感器;编码器;单片机中图分类号:TH122;TN710 文献标识码:B 文章编号:1009-0134(2017)02-0134-040 引言本课题所涉及的检测对象是XGZT-III 型姿态传感器;XGZT-III 型姿态传感器是否处于正常的工作状态,对整个自行火炮是否能够实现精确打击有着举足轻重的意义。
目前自行火炮系统的姿态传感器的检测基本是用经纬仪测量的,由于经纬仪的测量精度不高、体积较大等劣势使其在作战中得不到广泛的应用,尤其是在部队行军过程中无法对对姿态传感器进行检测,所以设计一套专门测量XGZT-III 型姿态传感器的高精度检测平台是非常有必要的。
本文设计的XGZT-III 型姿态传感器检测平台具有检测精度高、体积小、长期稳定性好、安装携带方便以及能够适应复杂使用环境等的特点,对提高军队作战攻击能力具有十分重要的意义。
1 姿态传感器检测平台结构方案设计检测平台属于旋转型两轴平台,采用对称性好、整体刚度大、结构紧凑和体积小的O 型框架结构[1];结构原理图如图1所示。
x 俯仰角Y 横滚角Z 稳定轴稳定平面图1 两自由度检测平台框架原理图1.1 姿态传感器检测平台系统机械结构整体设计平台底板设计为长方形结构,其外形尺寸为:400mm ×400mm ×10mm ;外框的外形尺寸为180mm ×160mm ×50mm ,厚度8mm 。
外框结构的一组对称两侧分别安装蜗轮蜗杆和编码器,另外两侧通过轴和轴承与平台底板的支撑板形成转动副;内框也设计为长方形盒体结构,其外形尺寸为136mm ×128mm ×65mm ,厚度10mm 。
内框的盒体内安放姿态传感器,在盒体上表面设计安放两个方向的水平仪。
由于姿态传感器检测平台的轴承主要受到径向载荷,承受少许的轴向载荷,因此平台系统采用深沟球轴承[2],具体型号和尺寸如表1所示。
表1 检测平台轴承型号及尺寸类型轴承型号外形尺寸d ×D ×B 内框轴承6190010mm ×22mm ×6mm 外框轴承6190010mm ×22mm ×6mm 蜗杆轴承628/78mm ×16mm ×5mm本设计使用SolidWorks 三维建模软件建立装配好的检测平台三维结构模型如图2所示。
1.2 编码器选择根据检测平台的具体检测要求,平台的检测精度为0.005°,选择长春长辉光电科技的CHA50S 型号18位单圈绝对式编码器。
由绝对式编码器的原理可知,18位单圈绝对值编码器的分辨率是其精度的三分之一[3,4],故其精度的大小经过具体计算后为(360/218)×3=0.00412°<0.005°,满足平台的检测要求。
1.3 蜗轮蜗杆传动设计计算1.3.1 内框蜗轮蜗杆转矩T内检测平台内框蜗轮蜗杆的转动惯量J内是由内框盒体本身绕Z轴旋转对内框蜗轮蜗杆轴转动惯量J内1和平台内框盒体安装的姿态传感器对内框蜗轮蜗杆轴转动惯量J内2两大部分构成的。
内框蜗轮蜗杆轴线与内框盒体几何中心保持垂直相交的关系[5,6]。
几何框体坐标系如图3所示。
x图3 几何框体坐标系内框盒体本身绕Z轴旋转对内框蜗轮蜗杆轴转动惯量J内。
图4所示长方体相对于Z轴转动惯量的计算公式如式(1)所示:(1)在实际的工作条件下,由于姿态传感器检测平台系统中的内框轴上安装的零件和联轴器对其转动所产生的转动惯量,故系数我们选择为2,计算得到内框蜗轮蜗杆的转动惯量J内为:因为本检测平台在检测姿态传感器时要求平台处于稳定状态,所以内框蜗轮蜗杆能提供的最大角速度和最大角加速度为内框架的相对载体的最大角速度和最大角加速度,所以有内框涡轮蜗杆转矩T内:1.3.2 外框蜗轮蜗杆转矩T外外框蜗轮蜗杆的转动惯量J外是由外框本身绕Z轴旋转对外框蜗轮蜗杆轴的转动惯量J外1、内框编码器跟随外框绕Z轴旋转对外框蜗轮蜗杆轴的转动惯量J外2、内框和负载质量绕Z轴旋转对外框蜗轮蜗杆轴的转动惯量J外3以及内框蜗轮蜗杆随外框绕Z轴旋转对外框蜗轮蜗杆轴的转动惯量J外4四大部分组成的。
在实际的工作条件下,由于姿态传感器检测平台系统中的外框轴上的安装座、零部件和联轴器所产生的转动惯量,故系数选择为2,则可以得到外框蜗轮蜗杆的转动惯量J外为:外框构件的最大角加速度为:β外=2.09rad/s2,计算得:0.138T J N mβ=⋅≈⋅1.3.3 蜗轮蜗杆设计与验证蜗轮选用铸造锡青铜(ZCuSn10Pb1),金属模铸造;蜗杆选用渗碳钢(20Cr),渗碳后表面淬硬到56-62HRC;加工精度为8级。
参照机械设计手册表13-4-4,初选蜗杆头数Z1=1,传动比i=30,则有:2130z z i==粗算传动效率η:由前文已知,蜗轮蜗杆输入转矩T入需要满足T入≥T外=0.138N·m,则有:参照机械设计手册表13-4-13,因为载荷平稳、蜗轮圆周速度v≤3m/s,故载荷系数K=1.1。
当蜗轮材料是金属模铸造锡青铜(ZCuSn10Pb1),且蜗杆齿面硬度大于45HRC时,查机械设计手册表13-4-15得接触应力HPσ=220N/mm2。
设计蜗轮蜗杆时要满足条件:蜗轮的断面模数m与蜗杆的轴向模数mX,即m=mX。
有接触强度设计公式:图2 检测平台基本结构模型查机械设计手册表13-4-3,取接触强度为3.276,则模数m =1.25,所以蜗杆系数q =18。
接触强度校核公式:(2)式中,d 1表示蜗杆分度圆直径,单位为mm ;d 2表示蜗轮分度圆直径,单位为mm ;经计算d 1=q m =22.5mm ,d 2=mz 2=37.5mm ,将其值代入式(2)中可得:22159.42/220/H Hp N mm N mmσσ=≤=2 姿态传感器检测平台系统硬件电路设计2.1 系统整体设计姿态传感器检测平台系统的整体硬件电路结构是以AT89C52单片机集成电路芯片为控制核心的;单圈绝对式编码器和姿态传感器通过数据采集电路与AT89C52进行数据传递,看门狗电路能够保证AT89C52程序可以正常运行,人机交互界面能够在液晶显示屏上显示角度值,数字量输出电路连接扩展了PC 上位机应用。
姿态传感器检测平台系统硬件电路整体结构框图如图4所示。
图4 系统硬件电路整体结构框图2.2 中央处理器(MCU )中央处理器是姿态传感器检测平台系统硬件电路的核心控制芯片。
爱特梅尔公司89系列的AT89C52单片机是一种高性能、低电压的8位CMOS 单片机,芯片片内包含8k 大小的可反复擦写的Flash 只读程序存储器以及256字节大小的随机存取数据存储器,这样方便装载与修改系统程序,采用此种单片机作为MCU [11]。
2.3 数据采集模块数据采集模块包含了单圈绝对式编码器输出信号数据采集和姿态传感器输出信号数据采集两大模块。
选用美信公司生产的MAX491芯片将编码器信号采集并转化为单片机可识别信号。
为了减少电路前后的干扰,在设计电路时添加了2个TLP521光耦。
绝对式编码器读数所需同步时钟信号由AT89C52单片机的P1.4口来模拟,绝对式编码器输出数据信号的接收选用单片机的P1.5口。
由姿态传感器的技术参数可知,其输出信号采用了符合RS-232协议的电平,不能直接被单片机识别。
因此选择MAX202芯片采集姿态传感器输出信号并转化为单片机可以识别的数据。
为了减少电路前后的干扰,在MAX202芯片的外围接了5个0.1uF 电容和2个TLP521光耦。
2.4 看门狗电路看门狗电路采用美国Xicor 公司生产的X25045芯片,该芯片将EEPROM 、定时器和电压监控集中到芯片内,大大减少设计系统硬件电路的工作量,同时也提高了系统可靠性。
2.5 人机交互界面电路人机交互界面包括4键独立式键盘和LCD12864液晶显示两大部分。
LCD12864液晶控制简单、具有良好的直观性。
LCD12864具有并行8位、并行4位、串行3线以及串行2线的四种工作模式,由于AT89C52单片机的I/O 口数量充足,所以LCD12864液晶显示使用并行8位的工作模式。
AT89C52单片机的P0.0~P0.7数据口与LCD12864的D0~D7连接;LCD12864复位端与AT89C52复位端相连;AT89C52的P3.4、P3.5、P3.6口分别与液晶显示的E 、R/W 、RS 端相连,分别控制液晶显示的使能、读写和寄存器;AT89C52的P3.7口接液晶显示的PSB 端;AT89C52的P2.3~P2.6口接4键独立式键盘用于实现系统的参数设定及功能切换。
2.6 数字量输出电路在AT89C52单片机与上位机的信息交互中,由于PC 上位机通常只有RS-232接口,所以数字量输出电路需要选用MAX232芯片将AT89C52的输出信号转换传送给PC 上位机识别的RS-232信号。
综上所述,将AT89C52主控制单片机芯片与数据采集电路、看门狗电路、人机互换界面电路和数字量输出电路设计在同一个电路板上,其他管脚均采用双排针引出,方便系统的扩展。
利用AltiumDesigner10画图软件设计出XGZT-III 型姿态传感器检测平台系统硬件整体电路原理图如图5所示。
3 结论按照此设计,结合软件编程,完成姿态传感器检测平台的设计,解决了通用仪器(经纬仪)测量精度不高的问题,突破了专用仪器用于姿态传感器的高精度检测。
同时,可以有效解决姿态传感器在生产中的检测调试和使用过程中的周期性检测,提高了姿态传感器的可靠性;另一方面,高精度检测平台应用在部队行军战场上,方便部队使用,解决了部队在战斗过程中不能自检的问题,可以有效提高战斗力、减小伤亡,并且可以延长姿态传感器的使用寿命。