电机 德国公式表(formelsammlung)
电机常用计算公式及说明
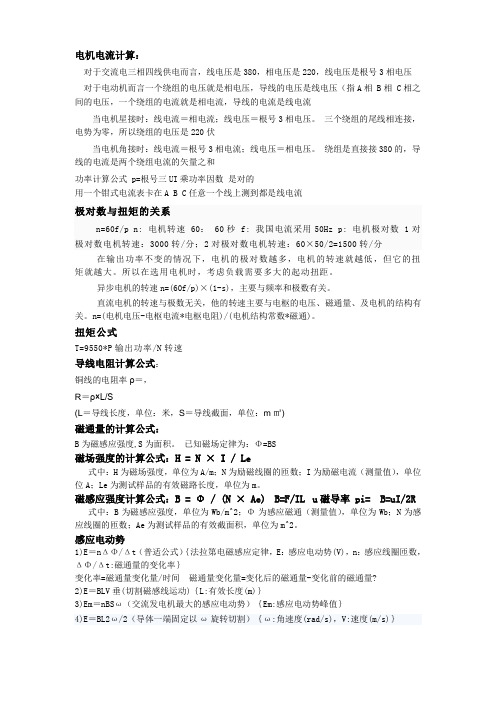
电机常用计算公式及说明Company Document number:WUUT-WUUY-WBBGB-BWYTT-1982GT电机电流计算:对于交流电三相四线供电而言,线电压是380,相电压是220,线电压是根号3相电压对于电动机而言一个绕组的电压就是相电压,导线的电压是线电压(指A相B相 C相之间的电压,一个绕组的电流就是相电流,导线的电流是线电流当电机星接时:线电流=相电流;线电压=根号3相电压。
三个绕组的尾线相连接,电势为零,所以绕组的电压是220伏当电机角接时:线电流=根号3相电流;线电压=相电压。
绕组是直接接380的,导线的电流是两个绕组电流的矢量之和功率计算公式 p=根号三UI乘功率因数是对的用一个钳式电流表卡在A B C任意一个线上测到都是线电流极对数与扭矩的关系n=60f/p n: 电机转速 60: 60秒 f: 我国电流采用50Hz p: 电机极对数 1对极对数电机转速:3000转/分;2对极对数电机转速:60×50/2=1500转/分在输出功率不变的情况下,电机的极对数越多,电机的转速就越低,但它的扭矩就越大。
所以在选用电机时,考虑负载需要多大的起动扭距。
异步电机的转速n=(60f/p)×(1-s),主要与频率和极数有关。
直流电机的转速与极数无关,他的转速主要与电枢的电压、磁通量、及电机的结构有关。
n=(电机电压-电枢电流*电枢电阻)/(电机结构常数*磁通)。
扭矩公式T=9550*P输出功率/N转速导线电阻计算公式:铜线的电阻率ρ=,R=ρ×L/S(L=导线长度,单位:米,S=导线截面,单位:m㎡)磁通量的计算公式:B为磁感应强度,S为面积。
已知磁场定律为:Φ=BS磁场强度的计算公式:H = N × I / Le式中:H为磁场强度,单位为A/m;N为励磁线圈的匝数;I为励磁电流(测量值),单位位A;Le为测试样品的有效磁路长度,单位为m。
电机常用计算公式及说明
电机电流计算:对于交流电三相四线供电而言,线电压是380,相电压是220,线电压是根号3相电压对于电动机而言一个绕组的电压就是相电压,导线的电压是线电压(指A相 B相 C相之间的电压,一个绕组的电流就是相电流,导线的电流是线电流当电机星接时:线电流=相电流;线电压=根号3相电压。
三个绕组的尾线相连接,电势为零,所以绕组的电压是220伏当电机角接时:线电流=根号3相电流;线电压=相电压。
绕组是直接接380的,导线的电流是两个绕组电流的矢量之和功率计算公式 p=根号三UI乘功率因数是对的用一个钳式电流表卡在A B C任意一个线上测到都是线电流极对数与扭矩的关系n=60f/p n: 电机转速 60: 60秒 f: 我国电流采用50Hz p: 电机极对数 1对极对数电机转速:3000转/分;2对极对数电机转速:60×50/2=1500转/分在输出功率不变的情况下,电机的极对数越多,电机的转速就越低,但它的扭矩就越大。
所以在选用电机时,考虑负载需要多大的起动扭距。
异步电机的转速n=(60f/p)×(1-s),主要与频率和极数有关。
直流电机的转速与极数无关,他的转速主要与电枢的电压、磁通量、及电机的结构有关。
n=(电机电压-电枢电流*电枢电阻)/(电机结构常数*磁通)。
扭矩公式T=9550*P输出功率/N转速导线电阻计算公式:铜线的电阻率ρ=,R=ρ×L/S(L=导线长度,单位:米,S=导线截面,单位:m㎡)磁通量的计算公式:B为磁感应强度,S为面积。
已知磁场定律为:Φ=BS磁场强度的计算公式:H = N × I / Le式中:H为磁场强度,单位为A/m;N为励磁线圈的匝数;I为励磁电流(测量值),单位位A;Le为测试样品的有效磁路长度,单位为m。
磁感应强度计算公式:B = Φ / (N × Ae)B=F/IL u磁导率 pi= B=uI/2R 式中:B为磁感应强度,单位为Wb/m^2;Φ为感应磁通(测量值),单位为Wb;N为感应线圈的匝数;Ae为测试样品的有效截面积,单位为m^2。
电动机的一些专业术语和概念
电动机的一些专业术语和概念关于电动机的一些专业术语和概念(双语版)Motor special terminology1.扭矩从转轴到力的作用线垂直距离 d 乘以力 F 等于扭矩 M,扭矩的单位名称是牛·米(N.m) M=Fd M=力矩(牛·米 N.m) F=力(牛顿 N) d=轴作用线垂直距离(米 m) 1(牛·米) =0.102(公斤·米)扭矩单位换算 The torque1(牛·米)=10.2(公斤·厘米)From the rotating shaft to the line of action of force perpendicular distance multiplied by F M D force equals the torque, torque unit name is New Mi(N.m). M = Fd M = torque (nm N. m) F= (N d= axis line of Newton) vertical distance (m m) 1 (New Mi) =0. 102 (kg· m)Torque unit 1 (New Mi) = 10. 2 (kg· cm)2、功率表示电机在单位时间内,在一定的转速下,输出一定的扭矩所做的功。
计算方式P = 2π/60*n*T P=机械功率(瓦 w) n=转速(转/分 r/min) T=扭矩(牛米 N.m)power Said motor unit time, at a certain speed, torque output of certain work do ne. Calculated by P = 2π/60*n*T P = mechanical power ( watts w) n-speed ( r / min r / min) T = torque ( Nm Nm)3、绝缘电阻常温、常湿下的电动机以DC500V 兆欧表测量线圈外壳间时,测量值为20MΩ以上。
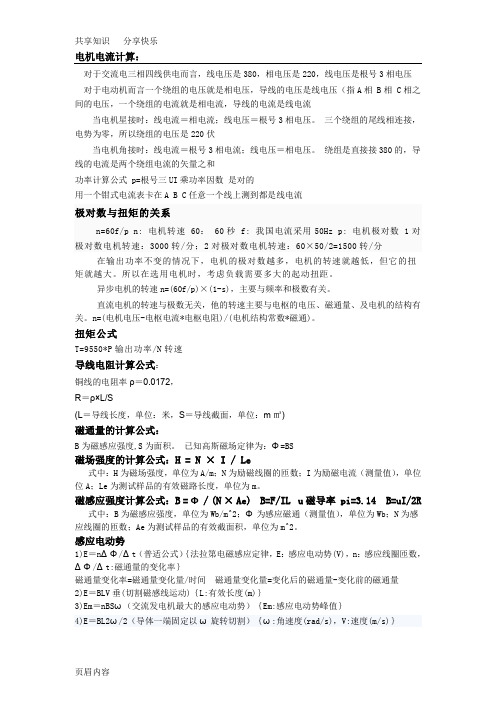
电机选型计算公式表-雷赛

a cos a)
安全系数
S=
1.5
电机惯量
JM=
0.0011 kgm2
减速机减速比
i=
4
机械结构 参数:
速度: 滑动部分质 量 丝杠长度
丝杠直径 丝杠导程 连轴器质量 连轴器直径 摩擦系数 移动距离 机械效率 定位时间 加减速时间 比 外力 移动方向与 水平轴夹角
1)速度曲 线
加速时间
2)电机转 速
3)负荷转 矩计算
丝杠水平 运动选型 计算表格
Vl=
120 m/min
M=
70 kg
LB=
0.8 m
DB=
0.032 m
PB=
0.04 m
MC
2 kg
DC
0.05 m
μ=
0.1
L=
0.5 m
η=
0.9
t=
0.5 s
A=
25%
FA=
0N
a=
0°
t0= t*A
= 0.125
s
NM = Vl /PB
= 3000rຫໍສະໝຸດ m轴向负载F = FFAA+ mg(sin a cos a)
= 68.6
N
FPB 2
= 0.000650606 kgm2
JC=
1 8
mDC 2
= 0.000625
kgm2
JL= JL+JB+JC
= 0.004112586 kgm2
2 Nm(Jm Jl)
TS=
60t1
= 13.10068721 Nm
TM= (TL+TS)*S
= 20.37889772 Nm
根据计算, 初步确定电 机型号,然 后输入转子 惯量,确认 TM
电机选型计算公式总结

电机选型计算公式总结————————————————————————————————作者:————————————————————————————————日期:电机选型计算公式总结功率:P=FV(线性运动)T=9550P/N(旋转运动)P——功率——WF——力——NV——速度——m/sT——转矩——N.M速度:V=πD N/60X1000D——直径——mmN——转速——rad/min加速度:A=V/tA——加速度——m/s2t——时间——s力矩:T=FL惯性矩:T=JaL——力臂——mm(圆一般为节圆半径R)J ——惯量——kg.m2 a ——角加速度——rad/s21. 圆柱体转动惯量(齿轮、联轴节、丝杠、轴的转动惯量)82MD J =对于钢材:341032-⨯⨯=gLrD J π)(1078.0264s cm kgf L D ⋅⋅⨯-M-圆柱体质量(kg); D-圆柱体直径(cm); L-圆柱体长度或厚度(cm); r-材料比重(gf /cm 3)。
2. 丝杠折算到马达轴上的转动惯量:2i Js J = (kgf·cm·s 2)J s –丝杠转动惯量(kgf·cm·s 2); i-降速比,12z z i =3. 工作台折算到丝杠上的转动惯量g w22⎪⎭⎫ ⎝⎛⋅=n v J π gw2s 2⎪⎭⎫ ⎝⎛=π (kgf·cm·s 2)角加速度a=2πn/60tv -工作台移动速度(cm/min); n-丝杠转速(r/min); w-工作台重量(kgf);g-重力加速度,g = 980cm/s 2; s-丝杠螺距(cm)2. 丝杠传动时传动系统折算到驱轴上的总转动惯量:())s cm (kgf 2g w 122221⋅⋅⎥⎥⎦⎤⎢⎢⎣⎡⎪⎭⎫ ⎝⎛+++=πs J J iJ J S tJ 1-齿轮z 1及其轴的转动惯量; J 2-齿轮z 2的转动惯量(kgf·cm·s 2); J s -丝杠转动惯量(kgf·cm·s 2); s-丝杠螺距,(cm); w-工件及工作台重量(kfg).5. 齿轮齿条传动时折算到小齿轮轴上的转动惯量DML J S J 2Z 2iJ 1Z 1VWJ 2Z 2J 1Z 1Wi MJ S2gw R J =(kgf·cm·s 2)R-齿轮分度圆半径(cm); w-工件及工作台重量(kgf)6. 齿轮齿条传动时传动系统折算到马达轴上的总转动惯量⎪⎪⎭⎫ ⎝⎛++=2221g w 1R J i J J tJ 1,J 2-分别为Ⅰ轴,Ⅱ轴上齿轮的转动惯量(kgf·cm·s 2);R-齿轮z 分度圆半径(cm);w-工件及工作台重量(kgf)RJ 1J 2MⅠⅡZWZ。
电机常用计算公式及说明
对于交流电三相四线供电而言,线电压是380,相电压是220,线电压是根号3相电压对于电动机而言一个绕组的电压就是相电压,导线的电压是线电压(指A相 B相 C相之间的电压,一个绕组的电流就是相电流,导线的电流是线电流当电机星接时:线电流=相电流;线电压=根号3相电压。
三个绕组的尾线相连接,电势为零,所以绕组的电压是220伏当电机角接时:线电流=根号3相电流;线电压=相电压。
绕组是直接接380的,导线的电流是两个绕组电流的矢量之和功率计算公式 p=根号三UI乘功率因数是对的用一个钳式电流表卡在A B C任意一个线上测到都是线电流极对数与扭矩的关系n=60f/p n: 电机转速 60: 60秒 f: 我国电流采用50Hz p: 电机极对数 1对极对数电机转速:3000转/分;2对极对数电机转速:60×50/2=1500转/分在输出功率不变的情况下,电机的极对数越多,电机的转速就越低,但它的扭矩就越大。
所以在选用电机时,考虑负载需要多大的起动扭距。
异步电机的转速n=(60f/p)×(1-s),主要与频率和极数有关。
直流电机的转速与极数无关,他的转速主要与电枢的电压、磁通量、及电机的结构有关。
n=(电机电压-电枢电流*电枢电阻)/(电机结构常数*磁通)。
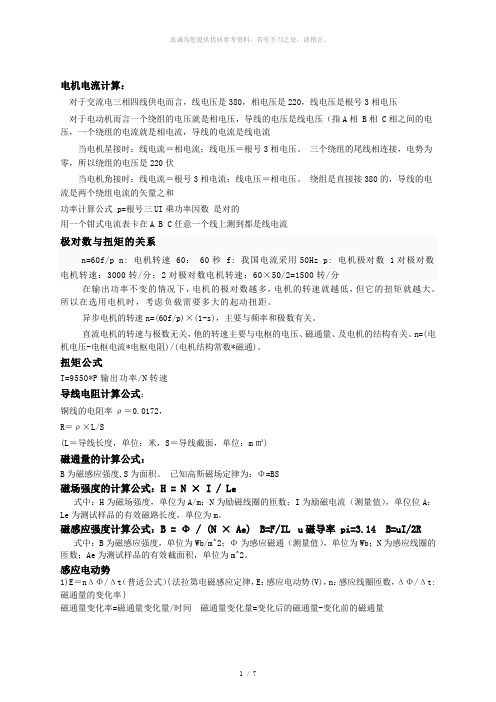
扭矩公式T=9550*P输出功率/N转速导线电阻计算公式:铜线的电阻率ρ=0.0172,R=ρ×L/S(L=导线长度,单位:米,S=导线截面,单位:m㎡)磁通量的计算公式:B为磁感应强度,S为面积。
已知高斯磁场定律为:Φ=BS磁场强度的计算公式:H = N × I / Le式中:H为磁场强度,单位为A/m;N为励磁线圈的匝数;I为励磁电流(测量值),单位位A;Le为测试样品的有效磁路长度,单位为m。
磁感应强度计算公式:B = Φ/ (N × Ae)B=F/IL u磁导率 pi=3.14 B=uI/2R 式中:B为磁感应强度,单位为Wb/m^2;Φ为感应磁通(测量值),单位为Wb;N为感应线圈的匝数;Ae为测试样品的有效截面积,单位为m^2。
电动机的计算公式及方法
电动机的计算公式及方法一、电机电流计算:对于交流电三相四线供电而言,线电压是380,相电压是220,线电压是根号3相电压对于电动机而言一个绕组的电压就是相电压,导线的电压是线电压(指A相 B相 C相之间的电压,一个绕组的电流就是相电流,导线的电流是线电流当电机星接时:线电流=相电流;线电压=根号3相电压。
三个绕组的尾线相连接,电势为零,所以绕组的电压是220伏当电机角接时:线电流=根号3相电流;线电压=相电压。
绕组是直接接380的,导线的电流是两个绕组电流的矢量之和功率计算公式 p=根号三UI乘功率因数是对的用一个钳式电流表卡在A B C任意一个线上测到都是线电流二、极对数与扭矩的关系n=60f/pn: 电机转速60:60秒f: 我国电流采用50Hzp: 电机极对数1对极对数电机转速:3000转/分;2对极对数电机转速:60×50/2=1500转/分在输出功率不变的情况下,电机的极对数越多,电机的转速就越低,但它的扭矩就越大。
所以在选用电机时,考虑负载需要多大的起动扭距。
异步电机的转速n=(60f/p)×(1-s),主要与频率和极数有关。
直流电机的转速与极数无关,他的转速主要与电枢的电压、磁通量、及电机的结构有关。
n=(电机电压-电枢电流*电枢电阻)/(电机结构常数*磁通)。
扭矩公式T=9550*P输出功率/N转速导线电阻计算公式:铜线的电阻率ρ=0.0172,R=ρ×L/S(L=导线长度,单位:米,S=导线截面,单位:m㎡)磁通量的计算公式:B为磁感应强度,S为面积。
已知高斯磁场定律为:Φ=BS磁场强度的计算公式:H = N × I / Le式中:H为磁场强度,单位为A/m;N为励磁线圈的匝数;I为励磁电流(测量值),单位位A;Le为测试样品的有效磁路长度,单位为m。
磁感应强度计算公式:B = Φ / (N × Ae) B=F/IL u磁导率 pi=3.14 B=uI/2R式中:B为磁感应强度,单位为Wb/m^2;Φ为感应磁通(测量值),单位为Wb;N为感应线圈的匝数;Ae为测试样品的有效截面积,单位为m^2。
电机简单的计算公式

电机简单的计算公式电机是一种将电能转换为机械能的设备,广泛应用于工业生产、交通运输、家用电器等领域。
在电机的设计和使用过程中,需要进行各种计算来确定电机的性能参数和工作状态。
本文将介绍电机的简单计算公式,帮助读者了解电机的基本原理和计算方法。
一、电机的基本原理。
电机是利用电磁感应原理将电能转换为机械能的设备。
通常情况下,电机由定子和转子两部分组成。
定子上绕有线圈,通以电流产生磁场,转子则被置于磁场中并受到电磁力的作用而转动。
根据不同的工作原理和结构特点,电机可以分为直流电机、交流电机、步进电机等多种类型。
二、电机的简单计算公式。
1. 电机的转速计算公式。
电机的转速通常用每分钟转数(rpm)来表示,其计算公式为:n = 60 f / p。
其中,n为电机的转速,f为电源的频率,p为电机的极对数。
在工业生产中,电源的频率通常为50Hz或60Hz,而电机的极对数则取决于电机的设计和制造。
2. 电机的输出功率计算公式。
电机的输出功率是指电机输出的机械功率,其计算公式为:P = T ω。
其中,P为电机的输出功率,T为电机的输出转矩,ω为电机的角速度。
电机的输出转矩和角速度是电机设计和工作状态的重要参数,直接影响电机的输出功率和效率。
3. 电机的效率计算公式。
电机的效率是指电机输出功率与输入功率之比,通常用百分比表示。
其计算公式为:η = (Pout / Pin) 100%。
其中,η为电机的效率,Pout为电机的输出功率,Pin为电机的输入功率。
电机的效率是衡量电机性能优劣的重要指标,也是节能环保的关键因素。
4. 电机的电流计算公式。
电机的电流是指电机工作时所消耗的电流,其计算公式为:I = P / (U cosφ)。
其中,I为电机的电流,P为电机的输出功率,U为电机的电压,cosφ为电机的功率因数。
电机的电流是电机设计和选型的重要参考指标,直接影响电机的工作稳定性和安全性。
5. 电机的转矩计算公式。
电机的转矩是指电机在旋转运动中所产生的力矩,其计算公式为:T = I K。
电机的功率和电流计算公式

电机的功率和电流计算公式电机这玩意儿,在咱们生活中那可是无处不在啊!从家里的电风扇到工厂里的大型机器,都离不开电机的功劳。
而要搞明白电机的运行情况,功率和电流的计算公式那可太重要啦!先来说说电机功率的计算。
功率,简单理解就是电机干活儿的能力大小。
电机功率的计算公式是P = UI,这里的P 表示功率,U 是电压,I 呢则是电流。
比如说,一台电机工作时的电压是 220 伏,电流是 5 安,那它的功率就是 220×5 = 1100 瓦。
再讲讲电机电流的计算。
这电流呀,就好比是电机干活儿时“吃”进去的能量。
电机电流的计算公式有好几种,咱先来说说常见的一种,对于单相电机,电流 I = P / (U×cosφ),这里的cosφ 是功率因数。
而对于三相电机,电流 I = P / (√3×U×cosφ)。
给您说个我之前遇到的事儿。
有一次,我去一个小工厂帮忙检修设备。
他们有一台电机老是出问题,运转不顺畅。
我一检查,发现他们根本就没搞清楚这电机的功率和电流应该是多少,供电配置完全不对。
我就按照公式,仔细测量了电压、功率因数这些参数,重新计算了电流,调整了供电设置。
嘿,您猜怎么着,这电机立马就欢快地转起来了,那工厂老板对我是千恩万谢。
咱们接着说电机的事儿。
在实际应用中,电机的功率和电流计算可不能马虎。
如果计算错误,小则电机效率低下,大则可能会损坏电机,造成生产停滞,那损失可就大了。
比如说,要是给电机提供的电流过小,电机就像饿着肚子干活儿的人,没劲儿,转不动;电流过大呢,电机又像吃撑了的人,负担过重,容易发热甚至烧毁。
而且啊,不同类型的电机,功率和电流的计算还有一些细微的差别。
像直流电机、异步电机、同步电机等等,它们的计算公式和参数都有所不同。
这就需要我们根据具体的电机类型,选择正确的公式和参数来进行计算。
还有哦,电机在工作的时候,环境因素也会对功率和电流产生影响。
比如温度过高或者过低,湿度太大,都会让电机的性能发生变化。
电动机的计算公式及方法
电动机的计算公式及方法一、电机电流计算:对于交流电三相四线供电而言,线电压是380,相电压是220,线电压是根号3相电压对于电动机而言一个绕组的电压就是相电压,导线的电压是线电压(指A相 B相 C相之间的电压,一个绕组的电流就是相电流,导线的电流是线电流当电机星接时:线电流=相电流;线电压=根号3相电压。
三个绕组的尾线相连接,电势为零,所以绕组的电压是220伏当电机角接时:线电流=根号3相电流;线电压=相电压。
绕组是直接接380的,导线的电流是两个绕组电流的矢量之和功率计算公式 p=根号三UI乘功率因数是对的用一个钳式电流表卡在A B C任意一个线上测到都是线电流二、极对数与扭矩的关系n=60f/pn: 电机转速60:60秒f: 我国电流采用50Hzp: 电机极对数1对极对数电机转速:3000转/分;2对极对数电机转速:60×50/2=1500转/分在输出功率不变的情况下,电机的极对数越多,电机的转速就越低,但它的扭矩就越大。
所以在选用电机时,考虑负载需要多大的起动扭距。
异步电机的转速n=(60f/p)×(1-s),主要与频率和极数有关。
直流电机的转速与极数无关,他的转速主要与电枢的电压、磁通量、及电机的结构有关。
n=(电机电压-电枢电流*电枢电阻)/(电机结构常数*磁通)。
扭矩公式T=9550*P输出功率/N转速导线电阻计算公式:铜线的电阻率ρ=0.0172,R=ρ×L/S(L=导线长度,单位:米,S=导线截面,单位:m㎡)磁通量的计算公式:B为磁感应强度,S为面积。
已知高斯磁场定律为:Φ=BS磁场强度的计算公式:H = N × I / Le式中:H为磁场强度,单位为A/m;N为励磁线圈的匝数;I为励磁电流(测量值),单位位A;Le为测试样品的有效磁路长度,单位为m。
磁感应强度计算公式:B = Φ / (N × Ae) B=F/IL u磁导率 pi=3.14 B=uI/2R式中:B为磁感应强度,单位为Wb/m^2;Φ为感应磁通(测量值),单位为Wb;N为感应线圈的匝数;Ae为测试样品的有效截面积,单位为m^2。
电机常用计算公式及说明
电机电流计算:对于交流电三相四线供电而言,线电压是380,相电压是220,线电压是根号3相电压对于电动机而言一个绕组的电压就是相电压,导线的电压是线电压(指A相 B相 C相之间的电压,一个绕组的电流就是相电流,导线的电流是线电流当电机星接时:线电流=相电流;线电压=根号3相电压。
三个绕组的尾线相连接,电势为零,所以绕组的电压是220伏当电机角接时:线电流=根号3相电流;线电压=相电压。
绕组是直接接380的,导线的电流是两个绕组电流的矢量之和功率计算公式 p=根号三UI乘功率因数是对的用一个钳式电流表卡在A B C任意一个线上测到都是线电流极对数与扭矩的关系n=60f/p n: 电机转速 60: 60秒 f: 我国电流采用50Hz p: 电机极对数 1对极对数电机转速:3000转/分;2对极对数电机转速:60×50/2=1500转/分在输出功率不变的情况下,电机的极对数越多,电机的转速就越低,但它的扭矩就越大。
所以在选用电机时,考虑负载需要多大的起动扭距。
异步电机的转速n=(60f/p)×(1-s),主要与频率和极数有关。
直流电机的转速与极数无关,他的转速主要与电枢的电压、磁通量、及电机的结构有关。
n=(电机电压-电枢电流*电枢电阻)/(电机结构常数*磁通)。
扭矩公式T=9550*P输出功率/N转速导线电阻计算公式:铜线的电阻率ρ=0.0172,R=ρ×L/S(L=导线长度,单位:米,S=导线截面,单位:m㎡)磁通量的计算公式:B为磁感应强度,S为面积。
已知高斯磁场定律为:Φ=BS磁场强度的计算公式:H = N × I / Le式中:H为磁场强度,单位为A/m;N为励磁线圈的匝数;I为励磁电流(测量值),单位位A;Le为测试样品的有效磁路长度,单位为m。
磁感应强度计算公式:B = Φ / (N × Ae)B=F/IL u磁导率 pi=3.14 B=uI/2R 式中:B为磁感应强度,单位为Wb/m^2;Φ为感应磁通(测量值),单位为Wb;N为感应线圈的匝数;Ae为测试样品的有效截面积,单位为m^2。
电机常用计算公式及说明

电机电流计算:对于交流电三相四线供电而言,线电压是380,相电压是220,线电压是根号3相电压对于电动机而言一个绕组的电压就是相电压,导线的电压是线电压(指A相 B相 C相之间的电压,一个绕组的电流就是相电流,导线的电流是线电流当电机星接时:线电流=相电流;线电压=根号3相电压。
三个绕组的尾线相连接,电势为零,所以绕组的电压是220伏当电机角接时:线电流=根号3相电流;线电压=相电压。
绕组是直接接380的,导线的电流是两个绕组电流的矢量之和功率计算公式 p=根号三UI乘功率因数是对的用一个钳式电流表卡在A B C任意一个线上测到都是线电流极对数与扭矩的关系n=60f/p n: 电机转速 60: 60秒 f: 我国电流采用50Hz p: 电机极对数 1对极对数电机转速:3000转/分;2对极对数电机转速:60×50/2=1500转/分在输出功率不变的情况下,电机的极对数越多,电机的转速就越低,但它的扭矩就越大。
所以在选用电机时,考虑负载需要多大的起动扭距。
异步电机的转速n=(60f/p)×(1-s),主要与频率和极数有关。
直流电机的转速与极数无关,他的转速主要与电枢的电压、磁通量、及电机的结构有关。
n=(电机电压-电枢电流*电枢电阻)/(电机结构常数*磁通)。
扭矩公式T=9550*P输出功率/N转速导线电阻计算公式:铜线的电阻率ρ=0.0172,R=ρ×L/S(L=导线长度,单位:米,S=导线截面,单位:m㎡)磁通量的计算公式:B为磁感应强度,S为面积。
已知高斯磁场定律为:Φ=BS磁场强度的计算公式:H = N × I / Le式中:H为磁场强度,单位为A/m;N为励磁线圈的匝数;I为励磁电流(测量值),单位位A;Le为测试样品的有效磁路长度,单位为m。
磁感应强度计算公式:B = Φ/ (N ×Ae)B=F/IL u磁导率 pi=3.14 B=uI/2R 式中:B为磁感应强度,单位为Wb/m^2;Φ为感应磁通(测量值),单位为Wb;N为感应线圈的匝数;Ae为测试样品的有效截面积,单位为m^2。
电动机的计算公式及方法
电动机的计算公式及方法展开全文一、电机电流计算:对于交流电三相四线供电而言,线电压是380,相电压是220,线电压是根号3相电压对于电动机而言一个绕组的电压就是相电压,导线的电压是线电压(指A相 B相 C相之间的电压,一个绕组的电流就是相电流,导线的电流是线电流当电机星接时:线电流=相电流;线电压=根号3相电压。
三个绕组的尾线相连接,电势为零,所以绕组的电压是220伏当电机角接时:线电流=根号3相电流;线电压=相电压。
绕组是直接接380的,导线的电流是两个绕组电流的矢量之和功率计算公式 p=根号三UI乘功率因数是对的用一个钳式电流表卡在A B C任意一个线上测到都是线电流二、极对数与扭矩的关系n=60f/p n: 电机转速 60:60秒 f: 我国电流采用50Hz p: 电机极对数1对极对数电机转速:3000转/分;2对极对数电机转速:60×50/2=1500转/分在输出功率不变的情况下,电机的极对数越多,电机的转速就越低,但它的扭矩就越大。
所以在选用电机时,考虑负载需要多大的起动扭距。
异步电机的转速n=(60f/p)×(1-s),主要与频率和极数有关。
直流电机的转速与极数无关,他的转速主要与电枢的电压、磁通量、及电机的结构有关。
n=(电机电压-电枢电流*电枢电阻)/(电机结构常数*磁通)。
扭矩公式T=9550*P输出功率/N转速导线电阻计算公式:铜线的电阻率ρ=0.0172,R=ρ×L/S(L=导线长度,单位:米,S=导线截面,单位:m㎡)磁通量的计算公式:B为磁感应强度,S为面积。
已知高斯磁场定律为:Φ=BS磁场强度的计算公式:H = N × I / Le式中:H为磁场强度,单位为A/m;N为励磁线圈的匝数;I为励磁电流(测量值),单位位A;Le为测试样品的有效磁路长度,单位为m。
磁感应强度计算公式:B = Φ / (N × Ae) B=F/IL u磁导率pi=3.14 B=uI/2R式中:B为磁感应强度,单位为Wb/m^2;Φ为感应磁通(测量值),单位为Wb;N为感应线圈的匝数;Ae为测试样品的有效截面积,单位为m^2。
电机、滚珠丝杠、负载转矩等8种自动计算表格公式

电机、滚珠丝杠、负载转矩等 8种自动计算表格公式
J 0 =铁Jx =铝Jy =黄铜m = 尼龙d0 =外径(m)d1 =外径(m)pi l = 长度(m) 注: 国际单位外径d 0(mm)50*0.05m 内径d 1(mm)0*0m 长度L(mm)10*0.01m 密度ρ(kg/m 3)7800*重心线与旋转轴线距 离e (mm)0* 0m
惯量J1(kg.cm2)300.003kg.m2 7.9x103kg/m3 2.8x103kg/m3 8.5x103kg/m3 1.1x103kg/m3 3.1410039物体惯量(kg.cm 2) 0.00845 8.45E-07kg.m 2 直径d(mm)300*0.3m 厚度h(mm)10*0.01m 密度ρ(kg/m 3)1500重心线与旋转轴线距 离e (mm)0* 0m 计算结果:物体质量m(kg) 1.06028663 物体惯量(kg.cm 2)119.282245 0.0119282kg.m 2 物体质量m(kg) 100* 物体惯量(kg.cm 2)253.303387 0.0253303kg.m 2 惯量J 0(kg.cm 2) 10*0.001kg.m 2 质量m(kg)20* 重心线与旋转轴线距 离e (mm) 10*0.1m 直接惯量计算 电机每转1圈物体直线运动量A (m)饼状物体惯量计算 0.1* 直线运动物体惯量计算J 2222 ,53 mr mr (注明:实心球惯量=薄壁球惯量=) 计算结果: 质量m1(kg)20
计算结果:物体质量m(kg) 0.15315251 物体惯量(kg.cm 2)0.4786016 4.786E-05kg.m 2 外径d 0(mm):200*0.2m 内径d 1(mm):100*0.1m 长度L(mm):400*0.4m 密度ρ(kg/m 3):7800重心线与旋转轴线距 离e (mm)100* 0.1m 计算结果:物体质量m(kg) 73.513206 0.7351321 物体惯量(kg.cm 2)19450.3691 1.9450369kg.m 2质量(kg)不同形状物体惯量计算 x 0轴(通过重心的轴)的 惯性惯量 [kg·m 2 ] x轴的惯性惯量 [kg·m2]y轴的惯性惯量 [kg·m2]圆柱体惯量计算-圆柱体长度方向中心线和旋转中心线平行 圆柱体惯量计算-圆柱体长度方向中心线和和旋转中心线垂直 方形物体惯量计算 长度x(mm):50*0.05m 宽度y(mm):10*0.01m 高度z(mm):1*0.001m 密度ρ(kg/m 3):7800重心线与旋转轴线距 离e (m)0* 0m
电机的常用公式及知识点

电机的常用公式及知识点一、电机负载的计算方法汇总:1、水平直线运动轴:2、垂直直线运动轴:3、旋转轴运动:2负载惯量计算与负载转矩不同的是,只通过计算即可得到负载惯量的准确数值。
不管是直线运动还是旋转运动,对所有由电机驱动的运动部件的惯量分别计算,并按照规则相加即可得到负载惯量。
由以下基本公式就能得到几乎所有情况下的负载惯量:1、柱体的惯量2、运动体的惯量3、有变速机构时折算到电机轴上的惯量3运转功率及加速功率计算在电机选用中,除惯量、转矩之外,另一个注意事项即是电机功率计算。
一般可按下式求得:二、电机选型设计常用知识点:第一个当然是减速机,这个很常用。
第二个那必须是皮带和链条减速器,这个老师也经常讲。
这个在一些工厂的背标设计要求中经常用到。
第三个,齿轮箱。
导螺杆折算到电机的转矩 :按照能量守恒定律:如果我们考虑到螺杆,负载,工作台的数据和效率:传送带:最后,齿轮齿条组合常见的机械的效率 :阿基米德螺杆(带铜衬套) : 0.35 - 0.65阿基米德螺杆(塑料衬套): 0.50-0.85滚珠丝杠 : 0.75- 0.85预加载滚珠丝杠: 0.85 - 0.95正齿轮 : ~ 0.75锥齿轮 : 0.90- 0.95蜗轮 : 0.45 -0.85链轮 : ~ 0.95, 0.98调速皮带 : ~ 0.96, 0.98轴承 : ~ 0.98摩擦摩擦的公共模型有三个组成部分 :1、滑动摩擦: 幅值大致不变.2、零速时的粘滞摩擦 (静摩擦).•从零速到滑行的摩擦过渡不明显.•仅仅在很低的速度下发生.•对系统有不稳定的影响, 会造成粘滑运动的现象.3、与速度成正比的粘滞阻尼.常见的滑动摩擦系数 :钢对钢 : ~ 0.58钢对钢 (涂脂) : ~ 0.15铝对钢 : ~ 0.45黄铜对钢 : ~ 0.35紫铜对钢 : ~ 0.58塑料对钢 : ~ 0.15, 0.25惯量系数低惯量 = 高加速度牛顿定律告诉我们, 对于一个旋转的系统 : M = J ω’ 这里 M : 转矩 (Nm)J : 惯量(Kg.m²)ω’ : 角加速度rd/s²ω’ = M / J (加速度 = 转矩 / 惯量)低惯量电机 :•允许高动态系统.•增加系统带宽.•但是增加了负载与电机的不匹配。
电动机的选择计算公式大全

设计项目
设计公式与说明
结果
1计算电动机功率
2确定电动机转速
3选择电动机
4分配传动比
5求各轴转速
6求各轴输入功率
6求各轴输入转矩
=
= 【查表2-3p'9】
V带传动功率 0.96(一条)
滚动轴承 0.99 (两对)
齿轮传动效率 0.97(一对)
=4.0KW
=0.913
= = =4.38KW
(2)齿宽b
(3)中心距a
4.校核齿根弯曲疲劳强度
(1)齿形系数 与齿根应力修正系数
(2)许用弯曲应力
由于是闭式软齿面传动,齿轮承载能力应由齿面接触疲劳强度决定,由式(6-11)
有关参数的选取与转矩的确定
由于工作平稳,精度不高,且齿轮为对称布置,查表6-3,取K=1.2。
(2)据式(9-17)。 = =5.5×1.3=7.15KW
查图9-10(P156),选B型带
(1)参考图9-10及表9-4(146),选取小带轮直径 =140mm
(2)验算带速
= =7.04m/s
(3)从动带轮直径
= = = =280mm
查表9-4,取 =280mm
(4)从动轮转速 =480r/min
=125r/min
V带传动比 =2~4 【i查表2-2 】
单级直齿圆柱齿轮传动比 =3~5
传动比合理围 = =6~20
= =(6~20)×125=750~2500r/min
根据功率及转速,查附录5( ),选电动机:
(1)Y132s-4 额定功率5.5KW
满载转速1440r/min
同步转速1500rmin
(2)该减速器为一般传动装置,转速不高,根据表6-2,初选8级精度。
电机计算公式推导
电机计算公式推导引言电机是指能够将电能转变为机械能的装置,是现代工业中不可或缺的关键设备之一。
为了能够准确地设计和选择电机,我们需要了解电机的工作原理和计算方法。
本文将推导电机计算公式,帮助读者更好地理解电机的运行和参数计算。
电机基本原理电机的工作原理基于法拉第电磁感应定律,即当导体在磁场中运动时,会产生感应电动势。
利用这个原理,通过电流在导线中流动产生的磁场和外部磁场的相互作用,电机可以实现转动。
电机计算公式推导转矩公式推导电机的输出转矩可以通过如下公式计算:\[T = K \cdot I \cdot B \cdot l\]其中:- \(T\) 表示转矩;- \(K\) 表示转矩系数;- \(I\) 表示电流;- \(B\) 表示磁场强度;- \(l\) 表示导线长度。
转矩系数 \(K\) 可以通过实验测量得到。
若已知电流 \(I\)、磁场强度 \(B\) 和导线长度 \(l\),即可计算出电机的转矩。
功率公式推导电机的输出功率可以通过如下公式计算:\[P = T \cdot \omega\]其中:- \(P\) 表示功率;- \(T\) 表示转矩;- \(\omega\) 表示角速度。
转矩 \(T\) 和角速度 \(\omega\) 可以通过电机的实测数据得到。
由此,可以计算出电机的输出功率。
效率公式推导电机的效率可以通过如下公式计算:\[\eta = \frac{P_{\text{输出}}}{P_{\text{输入}}}\]其中:- \(\eta\) 表示效率;- \(P_{\text{输出}}\) 表示输出功率;- \(P_{\text{输入}}\) 表示输入功率。
根据前述功率公式推导的结果,可以计算出电机的输入功率和输出功率,并计算出电机的效率。
结论电机计算公式的推导为电机的设计和选择提供了理论基础。
通过计算公式,我们可以准确地计算出电机的转矩、功率和效率,从而为实际工程项目中的电机应用提供参考。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Moment an Motorwelle
Mw = Mi − M R w= v , x =ϕ ⋅r r
Zeitkonstanten: Tm > 4Te Elektrische
Te =
L R JR c2
Mechanische Tm =
Trägheitsmomente: J ers = J Rotor + J Scheibe = J R + m ⋅ r 2
[H] = A/m [B] = Vs/m² = T [Φ] = Vs [v] = V [Rm] = A/Vs [µ0] = Vs/Am [ψ] = Vs [ θ] = A Φ = θ/Rm µ0 = 2π . 107 ψ = Φ. w θ= i .w
Feldlinien laufen bevorzugt durch Weicheisen.
SS 2005
-1-
Olga Klepan
Hochschule Heilbronn Mechatronik und Mikrosystemtechnik
Formelsammlung AT 1
Prof. Dr.-Ing. R. Kern Antriebe 1
Der Wirkungsgrad
η=
Pab Pmech M ⋅ w = = Pzu Pel U ⋅i
Mi =
ωs
PD
Mi =
Pn − n i ⋅ Ii2 ⋅ R i − VFe ⋅p 2 ⋅ π ⋅ fi
SS 2005
-4-
Olga Klepan
Hochschule Heilbronn Mechatronik und Mikrosystemtechnik
Formelsamml. Kern Antriebe 1
Prof. Dr.-Ing. R. Kern Antriebe 1
bei R 1= 0 : liegt der Kreismittelpunkt auf der Imaginärachse
SS 2005
-7-
Olga Klepan
Hochschule Heilbronn Mechatronik und Mikrosystemtechnik
Formelsammlung AT 1
Prof. Dr.-Ing. R. Kern Antriebe 1
Gleichstrommaschine
Differentialgleichungen
Maschengleichung für Ankerkreis: 1. Fundamentalsatz: 2. Fundamentalsatz: Drallsatz:
Stromortskurve mit Stromzeiger: Konstruktion des Kreismittelpunktes:
SS 2005
-5-
Olga Klepan
Hochschule Heilbronn Mechatronik und Mikrosystemtechnik
Formelsammlung AT 1
Feldstärke Flussdichte, magn.Induktion Luftspaltinduktion magn. Fluss magn. Spannung magn. Widerstand Permeabilität verketteter Fluss Durchflutung Anzahl der Wicklungen
ist
Die Übertragungsfunktion
c U c + s ⋅ J ⋅ r + s2 ⋅ J ⋅ l 1 1 G= ⋅ c J ⋅ l ⋅ s2 + J ⋅ R ⋅ s + 1 c2 c2 G=
=
2
ω
1 1 G= ⋅ c J ⋅L 2 J ⋅R ⋅ s + 2 ⋅ s +1 c2 c
mit
∆M 1 ⋅ 2 ∆ω M an
(
)
(
)
c=
U ⋅ ∆M M an ⋅ ∆ω
ωM =0 = M an ⋅
∆ω ∆M
Asynchronmaschine
Die elektrische Leistung: Der Schlupf Die Kupferverluste Die mechanische Leistung
U ind ( s ) = c ⋅ ω ( s ) M i ( s) = c ⋅ i( s) J ⋅ s ⋅ ω( s) = M i ( s) − M L ( s) ∆ω R = 2 c ∆M
v( s) r
Bei Moment =0:
w0 =
M an =
Steigung der Kennlinie
m= −
Der Einfluss des Lastenmomentes (Störübertragungsfunktion)
G ω ,Ml ( s ) =
Ml (s )
ω (s )
|U = 0 =
R + L⋅s c ( Te ⋅ Tm ⋅ s 2 + Tm ⋅ s + 1)
2
mit Tm > 4 Te:
Zweite Vereinfachung Wenn Te << Tm Dann kann
η=
M Welle ⋅ ω M = 1 − R U ⋅i M
M ⋅ 1 − M an
M=Mi
Mw = Mi − M R
Maximum: 2 MR ηmax = 1 − M an
Wird erreicht, wenn
M = M R ⋅ M an
Formelsammlung AT 1
Prof. Dr.-Ing. R. Kern Antriebe 1
Leistungs- und Drehmomentengerade bei R1 = 0:
Bestimmung der max. Leistung:
SS 2005
-3-
Olga Klepan
Hochschule Heilbronn Mechatronik und Mikrosystemtechnik
Formelsammlung AT 1
Prof. Dr.-Ing. R. Kern Antriebe 1
Zweisträngige Drehfeldmaschine
1 1 Bg ⋅ e − jω t + Bn ⋅ e jω t B = ⋅ ej⋅α ⋅ B01 + B02 ⋅ ej⋅(ε −ϕ) ⋅ e− jωt + B01 + B02 ⋅ ej⋅(ε +ϕ) ⋅ ejωt = B = ⋅ e j⋅α ⋅ 2 2 Stränge um 90° versetzen und Phasen um 90° verschieben. R a = U2 ⋅
Bei Anlauf
Leerlaufdrehzahl
w0 = stationäre Kennlinie
R ⋅ M an c
idelle
ω (M) =
U R − ⋅M c c2
reale Motorregulierung
aus U = c ⋅ w +
Mi ML MR Mw Man R/c² w c U/c J
Laplace- Transformierte_____
U = i ⋅R + L⋅
U ind = c ⋅ ω Mi = c ⋅i & = Mi − M L J ⋅ω
U c U ⋅c R
di + U ind dt
U ( s) = R ⋅ i( s) + L ⋅ s ⋅ i( s) + c ⋅ ω( s)
He . le :gegenüber den restlichen Termen vernachlässigbar
U ind = B ⋅ v ⋅ l mit w = v und v = r ⋅ w r
U ind = B ⋅ l ⋅ r ⋅ w = c ⋅ w
H B BL Φ v Rm µ ψ θ w
Elektromagnetismus
1. Durchflutung
2. Flusserhaltung
∫ H ⋅ dl = ∑ i
k
k
Φ = A i ⋅ Bi = const. für i = 1, 2..5 BL = µ 0 ⋅ H L
Luft Eisen
= A L ⋅ BL
3. Materialgesetze
Pel = n Stränge ⋅ U ⋅ I ⋅ cos (ϕ )
S=
n s − n Maschine ns
VCu 2 = s ⋅ PD
Pmech = PD − VCu = (1 − s ) ⋅ PD
;
PD = n1 ⋅ U1h ⋅ I1 ⋅ cos ϕ
Das innere Moment
Mi =
PNetz − n i ⋅ Ii2 ⋅ R i 2 ⋅ π ⋅ fs
inneres Moment Lastmoment Reibmoment Moment an Motorwelle Anlaufmoment Motorregulierung Drehzahl w = 2π n Motorkonstante ideelle Leerlaufdrehzahl kg m² Trägheitsmoment
R R
erweitern
so entsteht die Vereinfachung
1 G= ⋅ c 1 Tm ⋅ Te ⋅ s + Tm
2
1 1 1 G= ⋅ ≈ 2 c Tm ⋅ Te ⋅ s + Tm ⋅ s + 1 ( Tm ⋅ s + 1)( Te ⋅ s + 1)