Technical Support Package Three-Degree-of-Freedom Parallel Mechanical Linkage NASA Tech Bri
ALLWriter 高级编写器系列用户指南说明书
Release NotesVersion 1.01 July 22nd, 1999ContentTechnical Support2 Introduction3 About this manualProduct descriptionPackage contentHardware Overview4 The base unitThe adapterThe MatchCardThe converterInstalling the Software7 Checking your computer systemInstalling the softwareSetting Up the Hardware8 Tutorial9 Frequently Asked Questions (FAQ)13It is often the case that users experience problems when installing or using a product for the first time. ALLWriter comes with a user-friendly Windows software interface to make it an easy and comfortable learning task.If you have questions or run into any problems, please consult the following list for help. As with all other System General programmers, software download for new device supports are free.1.This Manual2.On-Line HelpPress <F1> for help any time after activating the software.3.Internet Web SiteYou can access either (server in Taiwan)or(server in U.S.)to download the latest version of software, supported chip list, and many other useful information.ALLWriter software contains demo mode which can run all by itself for practice or evaluation purpose.4.Your local distributorCheck out our web site to find the distributor nearest to you.5.System General E-mail and FAXIf all the above cannot resolve your problems, you can contact System General offices atSystem General Corp. (Taiwan)3F, No. 1, Alley 8, Lane 45Bao-Shing Road, Shin-DianTaipei, TaiwanTel: +886-2-2917-3005Fax: +886-2-2911-1283E-mail:************.twSystem General Corp. (U.S.A)1623 South Main StreetMilpitas, CA 95035U.S.A.Tel: 408-263-6667Fax: 408-262-9220E-mail:***********************We welcome feedback or comments from you to improve our products and service quality.Thank you for choosing System General ALLWriter universal programmer. If you run into any difficulties using this machine, you can consult the followings for help (1) this manual (2) on-line help (3) your local distributor. We are making every effort possible to make it a comfortable and rewarding experience using ALLWriter.About this manualThis manual is written to serve as a handy guide for you to get started quickly and acquainted with ALLWriter. The software that comes with ALLWriter contains comprehensive on-line help topics to lead you step by step toward operational details you may want to know. We suggest that you read through this manual before using the programmer but resort to the abundant help resources embedded in the software in case of difficulties. Product DescriptionAllWriter universal programmer is designed mainly for engineering applications. It supports virtually almost all the programmable devices in the market, including EPROM, EEPROM, Flash EPROM, Micro-controllers, PLD, CPLD, FPGA etc. It can be connected to PC through either RS-232C serial port or the IEEE1284 parallel port. The friendly Windows software interface allows you to operate the system in the most intuitive manners, while the unique MatchCard design delicately configures the system to support devices with versatile pin-outs and helps generate the best waveform quality. Like other System General programmers, the software upgrades for AllWriter are free.Package ContentWhen you unpack ALLWriter box, you should find the followings:(1)ALLWriter Base Unit1(2)DIP (Dual In-line Package) 48 pin adapter1(3)System Diskettes (Programming Drivers)3(4) Power Cable1(5) RS-232C Serial Port Cable (9 pin)1(6) Parallel Port Cable (25 pin)1(7) MatchCards(varied, package-type dependent)(8) This Owner’s Guide1ALLWriter base unit contains the full input range, low-noise power supplies and advanced pin driver circuitryto generate the cleanest environment and best waveform quality for reliable programming.The AdapterALLWriter comes with Dual In-Line Package (DIP) 48 pin adapter. Currently this is the only adapter available on ALLWriter. To handle device package types other than DIP, various converters are available for package conversion.LED Status Description ON LINEGreen Power-On OK OrangePower-On Fail Self Test FailPASS/FAIL GreenOperation Passed Including:Self Test OK, DRAM Test OK, Program Passed Orange Operation in ProcessRedOperation Failed Including:Self Test Fail, DRAM Test Fail Program FailACTIVE Red Socket operation in progressFlashing Red Socket waiting for IC insertion. Indicate an enabled socket.OffSocket not in operation.DIP 48 PinSocketThe MatchCardA MatchCard is special adapter card or configuration card that is inserted in the front edge of the Adapter. Each MatchCard includes special circuitry required to program a specific device family of specific package type. In practically all cases, ALLWriter must have a MatchCard inserted in the MatchCard slot of the DIP48 adapter in order to program a device. Changing the MatchCard inserted in the slot changes the configuration of the programming system and the devices supported. Therefore, be sure to insert the correct MatchCard before you program a specific device.If you do not know which MatchCard you need to program a particular device, simply run the ALLWriter software AW.EXE and click Chip List Viewer button under communication dialog (see example on page 9).A Device Select dialog box will appear and allow you to enter the device part number and show you the correct MatchCard to use.The ConverterConverters are needed to convert non-DIP device packages type into DIP one through which devices in various packages can be programmed on the default DIP48 adapter of ALLWriter. Converter sits between the actual device and the DIP-48 adapter of ALLWriter to serve as a package conversion, and has to be used with its associated MatchCard properly inserted in the MatchCard slot of the DIP48 adapter. In most of the cases, the names of MatchCard contain the prefix representing the package type of the converter that a specific MatchCard is supposed to work with. For instance, MatchCard PLCC-32-XXX-00 should be in place when PLCC32 converter (CVT-PLCC32-UNI-S00) is used.needed for each specific type of device package. Incidentally; if users already have converters from other programmer vendors, there is a good chance that these converters are, although not recommended, reusable on ALLWriter. A test can be easily conducted by treating the target device inserted on that converter as one device in DIP package and choosing one of the DIP48 MatchCards (DIP48-XXX) to see if it can be programmed.Checking Your Computer SystemYou need to connect AllWriter to a PC with minimal hardware and software requirements as below:ŸPC 486-33 SX or better.ŸMicrosoft Windows 95 or 98Ÿ8 MB RAMŸ 4 MB free disk space.Installing the SoftwareFollow the procedures below for the software installation:Step 1: Insert AllWriter Setup diskette #1 in the floppy driver (Drive A: or Drive B: )Step 2: Under Windows, click the Start button at the lower-left corner and select Run.Step 3: Enter the name of the floppy driver, where you inserted the Setup diskette, followed by ':\setup' (for example, A:\setup). Click Ok to start.TIPS: To start the software installation, you may also display the content of ALLWriterSetup diskette #1 and look for the file setup.exe. Simply point your mouse on this file anddouble-click to initiate the software installation process.Step 4: Follow the step-by-step instructions on the PC display until the installation is finished.Note: If you have had ALLWriter properly connected to your PC, you can turn the poweron ALLWriter now and wait until the system goes through self-test. The ‘On Line’ LEDwill turn green to indicate that the system has passed all tests and ready.Step 5: Click on the Start button at the lower-left corner of your screen again, point your mouse to Programs | AllWriter | AW in that sequence to display respective side menus and finally click on AW to launch AW.EXEStep 1:Make sure that the power is OFF on ALLWriter base unit.Step 2:Insert the Adapter on the base unit.To connect the adapter in the base unit, align flush the front end of the adapter toward the front end of the base unit. The guiding slots of the 2 female connectors on the base unit will slide the 2 maleconnectors on adapters onto the correct connecting position. Make sure to use both hands to pushdown the adapter from the front and rear ends evenly for connection.Connecting/Removing the adapter with power on the base unit might damage the system.The adapter might have been connected to the base unit when you received your AllWriter. However, the vibration from transportation might adversely affect the connection between the adapter and base unit, If so, simply follow the instruction above to reposition the adapter.Step 3: Connect the PC Communication port.Choose to connect either the serial port or parallel port from your AllWriter to the PC. The softwareallows you to choose either the serial or parallel communication. The required cables are included in the package. To protect your PC and AllWriter, make sure the power is off on both systems.Note: The serial port cable shipped by default with ALLWriter is a 9-pin D-type connector. You may need a converter to convert 9-pin into 25 pin, depending on the serial port connector type on your PC. Step 4: Connect the power cord.AllWriter uses a three-pronged power plug, which only fits the grounded electric outlet. This design isa safety precaution for the programmer operators, and a protective measure against possible ESDdamages on the programmer and devices. Please do not defeat the design.Step 5: Turn the power on to your PC and then ALLWriter.In some cases, the sequence of power-on can be important. Always turn your PC on beforeALLWriter.Always ensure that there are no devices in the programmer at this moment.Users are strongly urged to wear an ESD wrist strap when handling or inserting IC devices into the socket. This is to prevent ElectroStatics Discharge which may damage or impose adverse effects on the pin-driver circuitry in the adapter or IC devices through the insertionslots on the socket.Before You Start:Make sure that you have gone through the steps described in the sections of Installing the Software and Setting Up the Hardware. Check the communication cable between ALLWriter and PC to see that they are properly connected at both ends. Make sure that there is no device on the sockets then turn on the power on your PC before ALLWriter.Programming a Device with the Data on your PC using Serial PortStep 1: Executing ALLWriter softwareClick on the Start button at the lower-left corner of your screen again, point your mouse to Programs | ALLWriter | AW in that sequence to display respective side menus and finally click on AW to launch AW.EXE. You will see the picture as shown below on your PC display:TIPS: Demo and Chip List Viewer buttons can be activated as stand-alone utilities on your PC without ALLWriter physically connected. They are the perfect tools for you to practice thesoftware and get a feeling of how the software works.Step 2: Setting up Communication with PCCheck the radio boxes to tell ALLWriter the serial port you choose (COM1 or COM2) to connect on your PC, and specify the baud rate your PC supports. The default baud rate is set at 57600 bits persecond (bps). ALLWriter supports up to 230400 bps. All done, go ahead click on Connect button. The baud rate is irrelevant in parallel port communication.TIPS: If you encounter communication problem, it may worth a try to choose a lower baud rateNote: After the connection is mad,. you will see a dialog box “Use default task” popped up on yourscreen. Simply click on OK button to accept it. ALLWriter software is equipped with task managerwhich makes your programming task management easy. To understand more about task manager,refer to “Selecting the device to program” section in the on-line help.After Connect button is pressed, ALLWriter starts to set up communications with PC. It then gothrough a series of self testing and DRAM testing which can be aborted by hitting the Stop button on the same dialog box. After all these are done, you will see the system console window and ALLWriter automatically load the driver of the device you selected last time, if any, and device help window may pop up for your easy reference.Step 3: Select the device you want to programClick on the Device item on the main bar. On the pull-down menu, choose Select Device. The device selection display appears as follows. Suppose you want to program AMD 27C512 in PLCC32 package.Type in the Search text entry area ‘amd’ and select from Package drop-down list the ‘PLCC32’ to see:You can further narrow your search and selection scope by giving specific choices in Package andMatchCard drop-down lists. Since DIP48 adapter is the only adapter available for now, you may want to leave this entry as it is (Adapter drop-down list is grayed-out anyway) Assigning different values to Package and MatchCard drop-down lists will activate additional filtering functions on whatever search results currently displayed on the screen.Before you hit the OK button, make sure that you have the right MatchCard and/or converter specified on the device selection display for a specific device with specific package. Pull the lever on the DIP48 socket in upright position, insert the PLCC32 converter in bottom-justified position with the DIP48socket, and press down the lever. Then insert the target device on the converter.In this tutorial, you see red x-marks on every device in the screen. This is a warning sign saying that you can not select the device under current hardware configuration. Most of the time, you are dealing with an incorrect MatchCard inserted or haven’t inserted any MatchCard at all. Simply find the right one you need and insert it to make the red x-mark disappear.Note: To instruct ALLWriter to re-detect the MatchCard you newly inserts, click on thesmall icon button (with a tool tip: Use current Adapter/MatchCard) to the left ofMatchCard drop-down list.You can double-click the device row on the list or hit OK to confirm your selection. ALLWriter will start loading the device driver for that particular device and display some messages on the consolewindow.Step 4: Download the Data File.Click on the Data File menu item on the menu bar of the console window and select Download, the following screen will appear.Key in the name of your intended file or use Browse button to select it from the disk. ALLWriter will automatically detect the file format for you or you can activate File Format drop-down list to see the formats supported. After hitting OK, ALLWriter will start file downloading and relevant messages will be shown on the console window.Note: It may be a good idea to check on the Pre-fill RAM buffer box to pre-fillALLWriter memory with the virgin state data (the data you should read in a blank ICdevice), mostly FF or 00.Step 5: Program your Device.Now, you are ready to get down to the real business. Move your mouse pointer to the Device menu item on the console window menu bar to see various kinds of operations you can run on your device. Inparticular; you can select EPROM Identify to let ALLWriter identify the device part number for you, which can save you from the device selection labor we demonstrated earlier. Knowing exactly what you want to do, you may insert the target device into the socket on the adapter or converter.Users are strongly urged to wear an ESD wrist strap when handling or inserting IC devices into the socket. This is to prevent ElectroStatics Discharge which may damage or impose adverse effects on the pin-driver circuitry in the adapter or IC devices through the insertion slots on the socket.Since we downloaded the data file from PC, ALLWriter had stored the content in its memory and we can simply select Program to start the device programming. Program is actually a re-configurable,combined operation which normally consists of: (a) blank check (b) program and (c) verify. You can configure the combination by activating Options menu item and select Device Options to display all the re-configurable option items (see below). For more information, refer to the “Configuring YourOperations” section in the on-line help menu.Step 6: Done.To end the program session, close the ALLWriter software and switch off the ALLWriter programmer1.Why choose ALLWriter from System General?ALLWriter is the first laboratory type programmer from System General for R&D use. It carries all the merits and features of System General’s other models which enjoys the greatest reliability and fastest programming speed. ALLWriter has the friendliest Windows user interface software with rich functions to thoughtfully serve every engineer. More importantly, ALLWriter adopts the proprietary MatchCard technology to achieve the lowest (TOC) Total Ownership Cost.2.What versions of Windows are supported?A: Microsoft Windows 95, 98. Windows NT will be supported in the next major release.3.What is a MatchCard?A MatchCard is a special adapter card or configuration card that is inserted in the front edge of theAdapter. Each MatchCard includes special circuitry required to program a specific device family ofspecific package type. In practically all cases, ALLWriter must have a MatchCard inserted in theMatchCard slot of the DIP48 adapter in order to program a device. Changing the inserted MatchCard in the slot changes the configuration of the programming system and the devices supported. Therefore, be sure to insert the correct MatchCard before you program a specific device. ALLWriter software makes it easy for you, simply run the software and the device selection tool will provide you with all theinformation you need.4.How do I deal with device in other packages?Use converters! A converter is a small device to convert whatever type of package your device is in to the Dual-In-Line (DIP) package. It can be inserted into the socket on top of the DIP-48 adapter that comes with your ALLWriter. Converters under 48 pins are universal, meaning that you can simply use just one converter to cover all devices in the same package. In addition, in most of the cases, ALLWriter allows you to use other generic converters to best protect your previous investments.5.How do I know if a particular device I need to program is supported or not?Go to your local distributor’s or System General’s web site at or and follow the hyperlink of software release section, choose ALLWriter and you can download the latest version of software or a Portable Data Format (PDF) chip list file for your review.ALLWriter software is equipped with demo mode which allows it to run in standalone mode. You can try it out and also learn what MatchCard or converter you need to program a specific device.6.Should I connect the ALLWriter to the PC serial or parallel?Apart from any performance reasons (e.g. speed), it does not matter whether you choose the serial port or parallel port to connect the programmer to your computer.7.Where can I get the lists of the chips supported, MatchCard, converters and new driver softwareupdates?Visit your local distributor’s or System General’s web sites at either or. Follow the hyperlink of Products and look for ALLWriter. It contains all theinformation you need and more.。
自我介绍英文版大学(合集5篇)
自我介绍英文版大学(合集5篇)1.自我介绍英文版大学第1篇Good morning !It is really my honor to have this opportunity for a interview,I hope i can make a good performance today. I'm confident that I can succeed. Now i will introduce myself briefly.I am XX years old,born in shandong province .I was graduated from qingdao university. my major is electronic.and i got my bachelor degree after my graduation in the year of 20XX.I spend most of my time on study,i have passed CET4/6 . and i have acquired basic knowledge of my major during my school time.In July 20XX, I begin work for a small private company as a technical support engineer in QingDao city.Because I'm capable of more responsibilities, so I decided to change my job.And in August 20**,I left QingDao to BeiJing and worked for a foreign enterprise as a automation software test engineer.Because I want to change my working environment, I'd like to find a job which is more challenging. Morover Motorola is a global company, so I feel I can gain the most from working in this kind of company ennvironment. That is the reason why I come here to compete for this position.I think I'm a good team player and I'm a person of great honesty to others. Also I am able to work under great pressure.That’s all. Thank you for giving me the chance.2.自我介绍英文版大学第2篇General IntroductionI am a third year master major in automation at Shanghai Jiao Tong University, P. R. China. With tremendous interest in Industrial Engineering, I am writing to apply for acceptance into your Ph.D. graduate program.Education backgroundIn 1995, I entered the Nanjing University of Science & Technology (NUST) -- widely considered one of the China’s best engineering schools. During the following undergraduate study, my academic records kept distinguished among the whole department. I was granted First ClassPrize every semester,In 1999, I got the privilege to enter the graduate program waived of the admission test.At the period of my graduate study, my overall GPA(3.77/4.0) ranked top 5% in the department. In the second semester, I became teacher assistant that is given to talented and matured students only. This year, I wonthe Acer Scholarship as the one and only candidate in my department, which is the ultimate accolade for distinguished students endowed by my university. Presently, I am preparing my graduation thesis and tryingfor the honor of excellent Graduation Thesis.Research experience and academic activityWhen a sophomore, I joined the Association of AI Enthusiast and began to narrow down my interest for my future research. With the tool of OpenGL and Matlab, I designed a simulation program for transportation schedul ing system. It is now widely used by different research groups in NUST.I assumed and fulfilled a sewage analysis & dispose project for Nanjing sewage treatment plant. This was my first practice to convert a laboratory idea to a commercial product.In retrospect, I find myself standing on a solid basis in both theoryand eXPerience, which has prepared me for the Ph.D. program. My future research interests include: Network Schedul ing Problem, Heuristic Algorithm research (especially in GA and Neural network), Supply chain network research, Hybrid system performance analysis with Petri nets and Data Mining.3.自我介绍英文版大学第3篇Hello everybody!My name is XXX, ** years old this year. In July I *** ** Normal School Art Teacher Fine Arts graduate program at their own expense. As from 97 countries no longer their own expense since health package distribution, so that I and "the most brilliant career under the sun" missed. Fortunately, at River West Malaysia factory complete lack of small teacher, was introduced, small as I completed one year of the temporary supply teachers. Recall that period of time both sweet and really good, although substitute low wages, but listening to students around the side of "teacher", "teacher" is called a stop, looked full of confidencewhich both eyes, then draw a childish little face, all the unhappinessin life have suddenly vanished. I wanted, if not to positive, as long as the school needs, that is, when the life I willingly substitute teachers. But then, countries started in 1998 and return of temporary andsubstitute teachers, the school received an oral notice,I harbored feelings reluctantly and quietly left the school.Today, I would like to re-examination by the aspirations of the rostrum is so urgent! My family a total of three sisters, two sisters who work, in order to take care of the elderly parents, I have to stay around them.I have held a shop, first operational craft, then garments. But nomatter how the business is handy, when a teacher is always glorious people yearn for and I would like to make every effort to pursue life-long career. I have to take the test several times, but for various reasons are unable to realize their dreams, but I secretly determined, given the chance, I have been test continue until the ideal realized. Today, I am, after the test of life, compared to my competitors in terms of age I no longer have an advantage, but I'm more than a child they love, patience and sense of responsibility, more of a mature and self-confidence. The teaching profession is sacred and great, he asked teachers not only must be knowledgeable, but also a noble sentiment. Therefore, when reading normal, I paid great attention to their overall development, to train its own extensive interests, and learned a trade, be good at painting and calligraphy than outside, but also sing, say,will speak. "High school only as a teacher, inspires them for the Fan"in the knowledge-learning and I also paid attention to develop their own high moral character, consciously abide by the law, abide by social morality, no bad habits and behavior. I think these are an educator should have the minimum literacy.If, I passed the interview, Chengweizhongduo Teacher Groups in 成员 I shall keep Nuli study and work hard, my hometown of Jiao Yu force ourselves to the cause, never let down, "the human soul," a major title. Thank you!4.自我介绍英文版大学第4篇Good morning. I am glad to be here for this interview. First let me introduce myself. My name is , 24. I come from Nanchang,the capital of Jiangxi Province. I graduated from the XXXXXX department of XXXXXUniversity in July ,2001.In the past two years I have been prepareing for the postgraduate examination while I have been teaching XXXXXin NO.XXXXmiddle School and I was a head-teacher of a class injunior grade two.Now all my hard work has got a result since I have a chance to be interview by you.I am open-minded ,quick in thought and very fond of history.In my spare time,I have broad interests like many other youngers.I like reading books, especially those about XXXX.Frequently I exchange with otherpeople by making comments in the forum on line.In addition ,during my college years,I was once a Net-bar technician.So, I have a comparative good command of network application.I am able to operate the computer well.I am skillful in searching for information in Internet.I am a football fan for years.Italian team is my favorite.Anyway,I feel great pity for our country's team.I always believe that one will easily lag behind unless he keeps on learning .Of course, if I am given a chance to study XXXXXX in this famous University,I will spare no effort to master a good command of advance .5.自我介绍英文版大学第5篇I think that since the admission, the school has to comply with the rules and regulations, has a good ideological and moral quality, outstanding Have a strong collective sense of honor and sense of responsibility, adhere to the principle of practical work forI thought the correct Chikunailao can have lofty ideals and great goals, the importance of personal moral cultivation, the adoption of a healthy life style, helpful, concerned about nationalIn school, I have been studying hard and assiduously, through systematic study and master a solid foundation ofAfter school hours, I actively participated in physical training, enhance physical fitness, loves labor and actively participate in the school's cultural and sports activities, to participate in social practice, inherit and carry forward the spirit of arduous struggle, also participated in the school's literature and calligraphy Association , Enriching the after-school life, in all its aspects have been improved "Bao Jianfeng from Grounding out, plum blossom-to the bitter cold," I firmly believe that through continuous learning and efforts to become a ideals, morality, culture, and discipline of students, with outstanding achievements meet the challenge, for the community I am a lifetime contribution to the construction of the翻译本人自入学以为,一直遵守学校的各项规章制度,具有良好的思想道德品质,各方面表现优秀。
世界卫生组织卫生信息系统能力的评估设计与结果
文章编号:1672-5166(2021)03-0330-06 中图分类号:R-34;R197.1 文献标志码:A摘 要 目的 探寻如何更好地应用评估工具来支持卫生健康信息系统建设。
方法 梳理世界卫生组织卫生信息系统能力(SCORE)评估指标体系构建思路、5个评估维度之间的关系、3级指标体系的构成,以及SCORE评估方法和评估过程。
结果 介绍SCORE的设计思路和中国卫生健康信息系统评估结果,以及跟国际评估结果的比较,系统研究SCORE卫生信息系统能力评估设计理念和方法。
结论 SCORE可为不同区域确定卫生健康行动及优先发展相关卫生健康管理信息系统提供支持。
关键词 卫生信息系统 SCORE评估 世界卫生组织The Design and Outcome of the World Health Organization SCORE Assessment Tool on Health Information System CapacityXIE Xueqin, WU ShiyongCenter for Health Statistics and Information, National Health Commission of People's Republic of China, Beijing 100810, ChinaAbstract This study sought to introduce the WHO's Survey, Count, Optimize, Review, Enable (SCORE) for health data technical package, and described its assessment design, China's SCORE report, international comparisons. We also summarized the establishment of the SCORE technical package, relationships among five assessment dimensions, the three-level indicator system, and the assessment instrument and methodology. The understanding of the SCORE technical package will allow us to apply it to strengthen the construction of the health information system and to support taking effective actions to improve population health and prioritizing the development of HIS across countries and regions.Keywords health information system; SCORE assessment; World Health Organization0 引言世界卫生组织(WHO)5年(2019—2023年)规划中,明确提出与各国合作,加强卫生信息系统能力建设,支持有效收集、分析和使用卫生健康数据[1]。
HP RepSM模型导入连接器配置指南 1.01 三月5日2013年说明书
Configuration Guide Model Import Connector for RepSM 1.01March 5, 2013Configuration Guide, Model Import Connector for RepSMCopyright © 2013 Hewlett-Packard Development Company, L.P.Confidential computer software. Valid license from HP required for possession, use or copying. Consistent with FAR 12.211 and 12.212, Commercial Computer Software, Computer Software Documentation, and Technical Data for Commercial Items are licensed to the U.S. Government under vendor's standard commercial license.The information contained herein is subject to change without notice. The only warranties for HP products and services are set forth in the express warranty statements accompanying such products and services. Nothing herein should be construed as constituting an additional warranty. HP shall not be liable for technical or editorial errors or omissions contained herein.Follow this link to see a complete statement of copyrights and acknowledgements: /copyrightThe network information used in the examples in this document (including IP addresses and hostnames) is for illustration purposes only.This document is confidential.Contact InformationRevision HistoryPhone A list of phone numbers is available on the HP ArcSight TechnicalSupport page: /us/en/software-solutions/software.html?compURI=1345981#.URitMaVwpWI .Support Web Site Protect 724 Community https:// Date ConnectorBuildNumberProduct Version Description 03/05/2013 5.2.7.6581.0 1.01•Added full 64-bit JVM package support includingwrapper libraries to enable the connector to runon the ArcSight Express appliance.•Updated the installation wizard steps to displayonly ArcSight Manager (Encrypted) as aselectable destination.•Removed the manual installation step to modifythe maxeventsbeforebuild property.09/20/ 2012 5.2.5.6432.0 1.00Initial release of RepSM and the connector .ContentsModel Import Connector for RepSM (5)Product Overview (5)Features and Functional Summary (5)Supported Platforms (6)Installing the Connector (6)Model Import Connector Installation (6)Running Connectors (13)Connector Upgrade (13)Administrative Tasks - RepSM Configuration using the ArcSight Console (14)Setting up the Model Import User in ESM (14)Starting and Stopping Data Import (15)Optional - Reloading RepSM Data (16)Optional - Optimization of Data Transfer Using a Timer (17)Confidential Model Import Connector for RepSM Configuration Guide 3Contents4Model Import Connector for RepSM Configuration Guide ConfidentialModel Import Connector for RepSM This guide describes installing the HP Model Import Connector for RepSM and configuringthe device for data collection.“Product Overview” on page 5“Supported Platforms” on page 6“Installing the Connector” on page 6“Running Connectors” on page 13“Administrative Tasks - RepSM Configuration using the ArcSight Console” on page 14 Product OverviewThe HP Reputation Security Monitor (RepSM) solution uses internet reputation data todetect Advance Persistent Threats and zero day attacks as well as provide context tosecurity events. The Model Import Connector for RepSM is a component of RepSM whichretrieves reputation data from the RepSM threat intelligence service (powered by HPDVLabs), processes this data, and forwards it to ArcSight ESM or ArcSight Express. Thisguide hereafter mentions “ESM” throughout; this refers to both ArcSight ESM and ArcSightExpress, in terms of functionality.The threat intelligence includes reputation information about internet nodes which areknown to exhibit bad behavior. The ill reputed nodes are identified by their networkaddress or Domain Name System (DNS) name. This data is used by the accompanyingRepSM content package to detect malware infected machines, zero day attacks, anddangerous browsing. The user can also use the data to implement custom ESM solutions.For further details on this solution, see the HP Reputation Security Monitor Solution Guide.Features and Functional SummaryThe Model Import Connector for RepSM retrieves the reputation data and forwards it toESM. This connector supports one ESM destination.Between restarts, the connector retrieves from the reputation service only the delta fromthe last retrieved version. If the connector requests only delta information from the threatintelligence service, and the service cannot provide such a delta, then a full update of datawill be sent to the connector. In this case, the existing entries in the ESM active list will bedropped, and the list repopulated with new entries from the latest full update.These entries are:⏹IPv4 addresses⏹Host and domain namesFor each entry these reputation attributes are retrieved:⏹Reputation Score⏹Exploit TypeConfidential Model Import Connector for RepSM Configuration Guide 5Model Import Connector for RepSM6 Model Import Connector for RepSM Configuration Guide ConfidentialThe initial load and any manually initiated full update will see a delay of about 5 minutes from the time the update is initiated. In the subsequent updates following the initial load of the entries, the connector will process deltas to add, delete, and update the entries which the RepSM service releases at intervals of every several hours. The connector checks for updates, by default, every two hours. The connector will read any warning codes ormessages sent by the RepSM service and will send these to ESM as an ArcSight event.Supported PlatformsFor details on ESM version support, see the HP Reputation Security Monitor SolutionRelease Notes .The connector supports the following platforms:⏹Microsoft Windows Server 2003 R2 (SP2), 64-bit ⏹Microsoft Windows Server 2008 R2, 64-bit ⏹Red Hat Enterprise Linux (RHEL) 5.5, 5.7, 6.1, 64-bitInstalling the ConnectorBefore installing the connector , verify that ESM (the product with which the connector will communicate) and ArcSight Console have already been installed correctly. It isrecommended that the connector not be installed on the same machine as ESM. Also, be sure the following are available:⏹Additional 2GB memory if the connector is run in standalone mode ⏹Subscription to the Reputation Security Monitor Service (RepSM)⏹Local administrator access to the machine on which the connector will be installed.⏹The machine, on which the connector will be installed, has external access over theInternet to any system over port 443 and connectivity to the ESM machine over port8443 (default) or the configured port if the default was not used.⏹ESM IP address, port, administrator user name, and password Model Import Connector InstallationThis section provides instructions on how to install the Model Import Connector for RepSM.To install the Model Import Connector for RepSM:1Obtain the license activation key. You will have received an e-mail containing a link tothe license activation page and an order number . Click the link or copy and paste theorder number , and follow the instructions that you receive from there on.2Download the Model Import Connector for RepSM installation executable using the linkprovided in the e-mail sent to you by HP. Due to storage requirements, the RepSM service might not provide accumulated delta updates if the connector has been down for more than aweek. In this case, a full import will be automatically performed.Model Import Connector for RepSMConfidential Model Import Connector for RepSM Configuration Guide 73Start the connector installer by running the executable.Follow the installation wizard through the following folder selection tasks andinstallation of the core connector software:◆Introduction ◆Choose Install Folder ◆Choose Shortcut Folder ◆Pre-Installation Summary ◆Installing...4When the installation of connector core component software is finished, the followingwindow is displayed.The Model Import Connector for RepSM installation requires additional steps after the installation wizard has finished. See step 16 of this procedure and subsequent steps for details.Model Import Connector for RepSM8 Model Import Connector for RepSM Configuration Guide Confidential5Select Add a Connector .6Model Import Connector for RepSM is already selected. Click Next .7Enter the required parameters to configure the connector , then click Next .ParameterDescription Service Activation Key When you request an activation key, HP will send you a .dat file.Open the .dat file in a pure ASCII text editor (such asNotepad++) and copy the entire second line of the file (theactivation key). Paste the activation key into the ServiceActivation Key field. This field is required.Model Import Connector for RepSMConfidential Model Import Connector for RepSM Configuration Guide 98ArcSight Manager (encrypted) is selected. Click Next .9Enter the Manager Host Name , Manager Port , and a valid ArcSight User nameand Password . This is the same user name and password you created during the Update Frequency (hours)Interval at which the connector checks for updates. The default is 2 (two hours). The value must be 1 or larger , and in whole numbers. Zero (0) is invalid. The default is recommended for performance reasons. This field is required.Proxy Host (https)Use this field and the following three fields only if you need theconnector to use a proxy to access the Internet. Enter the proxyhost IP address. This value is required for proxy configuration.Proxy Port Enter the proxy port. This value is required for proxyconfiguration.Proxy User Name Enter the proxy user name. This value is needed if the proxyrequires authentication. If you specify a proxy user name, youmust also specify a proxy password.Proxy PasswordEnter the password for the proxy user specified. This value isneeded if the proxy requires authentication. This field is requiredonly if you have specified a proxy user name.ParameterDescriptionModel Import Connector for RepSM10 Model Import Connector for RepSM Configuration Guide Confidential ArcSight Manager installation. Leave the values for the next three parameters as False . Click Next .10Enter a Name for the connector and provide other information identifying theconnector's use in your environment. Click Next.11Select whether to import a certificate.12Review the Add connector Summary and click Next. If the summary is incorrect, click Previous to make changes.Some folders, files, and logs are named RepDV or repdv. This naming does not affect the functioning of the connector and can be ignored.13The wizard now prompts you to choose whether you want to run the connector as a stand-alone process or as a service. Choose either Install as a service or Leave asa standalone application.14Click Next.15To close the installation wizard, choose Exit and click Next. There are further installation steps after you close the wizard. Be sure to continue with the subsequent installation steps.16If the connector is run in standalone mode, the default heap size is 256MB. For proper operation of the connector, HP recommends that you modify the heap size setting to2GB. There is no need to modify memory if the connector is run as a service; if theconnector is configured to run as a service, the heap size is set to 2GB by default.Increase the memory for the connector by doing the following (in the followingexample commands, ARCSIGHT_HOME represents the name of the directory wherethe connector is installed):◆For Linux - create the following shell script and be sure it is executable:~/ARCSIGHT_HOME/current/user/agent/setmem.shwith the following content:ARCSIGHT_MEMORY_OPTIONS=" -Xms1024m -Xmx2048m "◆For Windows - create the following batch file:$ARCSIGHT_HOME\current\user\agent\setmem.batwith the following content:SET ARCSIGHT_MEMORY_OPTIONS=" -Xms1024m -Xmx2048m "Be sure to use regular double quote characters in the file content in either the shellscript or the batch file.17Verify that the connector is running. You can check the ArcSight Console Navigator in the Resources tab, under Connectors. If the connector is running, you will see<connector_name> (running) listed. See “Running Connectors” on page 13.18 Set up the Model Import user in ESM. See “Setting up the Model Import User in ESM”on page 14.19Start the data import. See “Starting and Stopping Data Import” on page 15. Running ConnectorsConnectors can be installed and run in standalone mode, on Windows platforms as aWindows service, or on UNIX platforms as a UNIX daemon, depending upon the platformsupported. On Windows platforms, connectors also can be run using shortcuts and optionalStart menu entries.If installed standalone, the connector must be started manually, and is not automaticallyactive when a host is restarted. If installed as a service or daemon, the connector runsautomatically when the host is restarted. For information about connectors running asservices or daemons, see the ArcSight SmartConnector User's Guide, Chapter 3, InstallingSmartConnectors, in the section “Running SmartConnectors”.For connectors installed standalone, to run all installed connectors on a particular host,open a command window, go to $ARCSIGHT_HOME\current\bin and run: arcsightconnectorsTo view the connector log, read the file:For Windows - $ARCSIGHT_HOME\current\logs\agent.logFor Linux - ~/ARCSIGHT_HOME/current/logs/agent.logTo stop all connectors, enter Ctrl+C in the command window.Connector UpgradeTo upgrade the Model Import Connector for RepSM, you must uninstall the current versionof the connector and then install the latest version. For information about uninstallnigconnectors, see the ArcSight SmartConnector User's Guide.Administrative Tasks - RepSM Configuration using the ArcSight ConsoleThere are mandatory and optional administrative tasks. “Setting up the Model Import Userin ESM” on page 14 and “Starting and Stopping Data Import” on page 15 are mandatorysteps for connector installation, and are mentioned as part of the installation procedure.See “Installing the Connector” on page 6 for details. You might also find that you need toperform these tasks outside of the context of the installation procedure.The tasks “Optional - Reloading RepSM Data” on page 16 and “Optional - Optimization ofData Transfer Using a Timer” on page 17 can be performed as needed.Setting up the Model Import User in ESMTo set up a user for the Model Import Connector for RepSM, do the following:1Select the Model Import Connector for RepSM and right-click.2Select Configure:3In the configuration area, add the admin user to the Model Import User field:4Click OK .Starting and Stopping Data ImportBy default the connector’s data import capability is not started. You must start the import manually in the ArcSight Console.To start and stop import for the Model Import Connector for RepSM:1Select the Model Import Connector for RepSM and right-click.2Select Send Command > Model Import Connector > Start orStop:Data import needs to be started only once from the ArcSight Console. Unlessit is stopped from the ArcSight Console, there is no need to restart the dataimport.Optional - Reloading RepSM DataTo reload RepSM data:1If active, stop the connector.2Remove all files at:Linux - ~/ARCSIGHT_HOME/current/user/agent/agentdataWindows - $\ARCSIGHT_HOME\current\user\agent\agentdata 3Remove all folders and XML files (if any) at:Linux - ~/ARCSIGHT_HOME/current/user/agent/mic/repdvWindows - $\ARCSIGHT_HOME\current\user\agent\mic\repdv 4At the ArcSight Console, clear all entries in the Malicious Domains and Malicious IP Addresses Active Lists. For each Active List:a Select the Active List and right-click.b Select Clear Entries.5Restart the connector.Optional - Optimization of Data Transfer Using a Timer The time interval between archives sent by the connector to ESM can be controlled by the buildmodeldelay property. The default value is 1 minute.To increase or decrease this time interval, you can add the buildmodeldelay property to the file agent.properties (located at $ARCSIGHT_HOME\current\user\agent).The property buildmodeldelay is expressed in milliseconds.For example, the following property sets the time interval to 10 seconds:ponent[35].buildmodeldelay=10000。
公司及工厂职位名称英汉对照

常见职务英译:Accounting Assistant会计助理Accounting Manager 会计部经理Accounting Supervisor会计主管Administration Manager行政经理AdministrativeAssistant 行政助理Application Engineer 应用工程师Assistant Manager 副经理BondAnalyst 证券分析员BondTrader 证券交易员Business Manager 业务经理Buyer采购员Cashier 出纳员Chemical Engineer化学工程师Civil Engineer土木工程师ComputerSystemManager 计算机系统部经理Deputy General Manager 副总经理Economic Research Assistant 经济助究助理ElectricalEngineer 电气工程师Engineering Technician 工程技术员Export SalesManager 外销部经理Financial Controller财务主任GeneralManager/ President总经理General Manager Assistant 总经理助理GeneralManager's Secretary总经理秘书Manager for Public Relations公关部经理Market DevelopmentManager 市场开发部经理Marketing Manager 市场销售部经理Marketing Representative 销售代表Marketing RepresentativeManager 市场调研部经理Office Assistant 办公室助理Package Designer 包装设计师Personnel Manager 人事部经理Plant/ Factory Manager厂长Recruitment Co-ordinator招聘协调人RegionalManger地区经理Research&.Development Engineer 研究开发工程师Seller Representative销售代表Sales Supervisor 销售监管Simultaneous Interpreter 同声传译员Systems Engineer系统工程师Tourist Guide 导游Trade Finance Executive 贸易财务主管Marketing andSales(市场与销售部分)Vice-President of Sales 销售副总裁Senior Customer Manager 高级客户经理SalesManager 销售经理Regional SalesManager地区销售经理Merchandising Manager 采购经理SalesAssistant销售助理Wholesale Buyer 批发采购员Tele-Interviewer 电话调查员Real EstateAppraiser 房地产评估师Marketing Consultant 市场顾问Marketingand Sales Director 市场与销售总监MarketResearchAnalyst 市场调查分析员Manufacturer\'s Representative 厂家代表Director ofSubsidiary Rights 分公司权利总监Sales Representative销售代表Assistant Customer Executive客户管理助理Marketing Intern市场实习Marketing Director 市场总监Insurance Agent 保险代理人CustomerManager 客户经理Vice-PresidentofMarketing 市场副总裁Regional Customer Manager 地区客户经理SalesAdministrator 销售主管Telemarketing Director 电话销售总监AdvertisingManager 广告经理TravelAgent 旅行代办员Salesperson销售员Telemarketer 电话销售员Sales Executive销售执行者Marketing Assistant 市场助理Retail Buyer 零售采购员Real EstateManager 房地产经理Real EstateBroker房地产经纪人Purchasing Agent 采购代理Product Developer 产品开发Marketing Manager市场经理Advertising Coordinator 广告协调员Advertising Assistant 广告助理Ad Copywriter(Direct Mail) 广告文撰写人CustomerRepresentative 客户代表Computersand Mathematics(计算机部分)Manager ofNetwork Administration网络管理经理MIS Manager电脑部经理ProjectManager 项目经理Technical Engineer技术工程师DevelopmentalEngineer 开发工程师Systems Programmer 系统程序员Administrator 局域网管理员OperationsAnalyst 操作分析ComputerOperator电脑操作员ProductSupportManager 产品支持经理ComputerOperations Supervisor电脑操作主管Director of InFORMation Services信息服务主管Systems Engineer 系统工程师HardwareEngineer硬件工程师Applications Programmer 应用软件程序员InFORMation Analyst信息分析LANSystems Analyst 系统分析Statistician 统计员HumanResources(人力资源部分)Directorof HumanResources人力资源总监Assistant PersonnelOfficer 人事助理Compensation Manager 薪酬经理Employment Consultant招募顾问FacilityManager 后勤经理JobPlacement Officer人员配置专员LaborRelations Specialist劳动关系专员Recruiter 招聘人员Training Specialist 培训专员Vice-Presidentof HumanResources人力资源副总裁Assistant Vice-President of Human Resources 人力资源副总裁助理Personnel Manager职员经理Benefits Coordinator 员工福利协调员Employer Relations Representative员工关系代表Personnel Consultant 员工顾问Training Coordinator 培训协调员Executiveand Managerial(管理部分)Chief Executive Officer(CEO) 首席执行官Directorof Operations运营总监Vice-President 副总裁Branch Manager 部门经理Retail Store Manager 零售店经理HMO ProductManager产品经理Operations Manager 操作经理Assistant Vice-President副总裁助理Field Assurance Coordinator 土地担保协调员ManagementConsultant 管理顾问District Manager 市区经理Hospital Administrator 医院管理Import/Export Manager 进出口经理Insurance Claims Controller保险认领管理员Program Manager 程序管理经理Insurance Coordinator 保险协调员ProjectManager项目经理Inventory Control Manager库存管理经理Regional Manager 区域经理Chief Operations Officer(COO)首席运营官General Manager 总经理Executive Marketing Director 市场行政总监Controller(International) 国际监管FoodService Manager 食品服务经理ProductionManager 生产经理Administrator医疗保险管理Property Manager房地产经理Claims Examiner 主考官Controller(General) 管理员ServiceManager 服务经理Manufacturing Manager 制造业经理VendingManager售买经理Telecommunications Manager 电信业经理TransportationManager运输经理Warehouse Manager仓库经理Assistant StoreManager 商店经理助理Manager(Non-Profit and Charities)非盈利性慈善机构管理1 当前位置:4AAD.COM>> STUDY研究>> 术语Glossary >>正文繁體中文[英中对照] 4A广告公司职位[Associated Account Director]AAD——副客户总监[AssociatedArtDirector]AAD——副美术指导[AssociatedCreative Director]ACD——副创作总监[AccountDirector]AD ——客户服务总监、业务指导[Art Director]AD——美术指导(在创作部可以独挡一面执行美术指导工作的美术监督)[AccountExecutive]AE——客户执行、客户服务、客户主任;预算执行者,负责广告代理商和广告主之间的一切有关业务,观念,预算,广告表现之联系[AccountManager]AM——客户经理[Account Planner]AP——客户企划(分策略企划和业务企划两种)[Artist]——正稿员[AreaSale Manager]ASM——大区销售经理[CreativeDirector]CD——创作总监、创意总监、创意指导(CD的前身,不是撰稿人便是美术设计,因为积累了丰富的经验,并有优异的创作成绩而成为督导)[Copy Director]——文案指导[Creative Group Head]CGH——创意组长[Computer Visualizer]——计算机绘图员[Copywriter]CW——撰稿人[Director of Client Service]DCS——客户主管[ExecutiveCreative Director]ECD——执行创意总监[Finish Artist]FA——完稿、画师[Finish Artist GroupHead]——完稿组长[Group Account Director]GAD——客户群总监[Group CreativeDirector]GCD——创意群总监[GeneralManagingDirector]GMD——总经理[MediaDirector]MD——媒体指导、媒介部经理[Media Supervisor]——媒介主任、媒介总监[MediaPlanner]——媒介策划[Planning Director]——企划指导[Planning Supervisor]——企划总监[Print ProductionManager]——平面制作经理[Production Manager]——制作经理[ResearchSupervisor]——调查总监[Senior Art Director]SAD——高级美术指导[SeniorCopywriter]SCW——高级文案[Studio Manager]——画房经理、作业室经理[Traffic Control Specialist(简称Traffic)]——制管人员[Traffic Coordinator]——平面制作统筹[TV Producer]——制片[Visualizer]——插图家、插画师、绘图员、视觉设计[Visualizer GroupHead]——视觉设计组长。
Transition Networks SISTP1040-242-LRT 24小时技术支持说明书

4 10/100/1000T + 2 1000 Mini-GBIC with4 IEEE 802.3at High Power PoE Industrial Wide Temperature SwitchUser ManualSISTP1040-242-LRTV1.0September-2013FCC WarningThis Equipment has been tested and found to comply with the limits for a Class-A digital device, pursuant to Part 15 of the FCC rules. These limits are designed to provide reasonable protection against harmful interference in a residential installation. This equipment generates, uses, and can radiate radio frequency energy. It may cause harmful interference to radio communications if the equipment is not installed and used in accordance with the instructions. However, there is no guarantee that interference will not occur in a particular installation. If this equipment does cause harmful interference to radio or television reception, which can be determined by turning the equipment off and on, the user is encouraged to try to correct the interference by one or more of the following measures:⏹Reorient or relocate the receiving antenna.⏹Increase the separation between the equipment and receiver.⏹Connect the equipment into an outlet on a circuit different from that towhich the receiver is connected.⏹Consult the dealer or an experienced radio/TV technician for help. CE Mark WarningThis is a Class-A product. In a domestic environment this product may cause radio interference in which case the user may be required to take adequate measures.ContentIntroduction (1)Features (1)Package Contents (2)Hardware Description (3)Physical Dimensions (3)LED Indicators (4)RJ-45 Pin Assignments (5)Installation (8)DIN-Rail Mounting (8)Wall Mounting (10)Grounding the Industrial Switch (11)Wiring the Power Inputs (12)Wiring the Fault Alarm Contacts (13)Ethernet Cabling (14)Troubleshooting (17)Technical Specifications (18)IntroductionThe High-Power PoE Industrial Switch is a cost-effective solution, which meets the high reliability requirements demanded by industrial applications. To solve the inconvenience of wall outlet access, the equipment is designed with power over Ethernet ports complying with the IEEE 802.3at standard, providing each PoE port up to 30 watts for connected Powered Devices that need higher power consumption to receive power as well as data over the conventional RJ-45 cables.Features⏹System Interface/PerformanceRJ-45 ports support Auto MDI/MDI-X FunctionEmbedded 4-port PoE InjectionStore-and-Forward Switching ArchitectureBack-plane (Switching Fabric): 12GbpsMAC Address Table with 8K entries⏹Power InputDC 48V (48 ~ 57V) Redundant Power Input⏹Case/InstallationIP-30 ProtectionInstallation in a Pollution Degree 2 environmentDIN-rail and Wall mountings Design24-Hour Technical Support: 1-800-260-1312 International: +1-952-358-3601Package ContentsPlease refer to the package contents list below to verify them against the checklist.⏹PoE Industrial Switch x 1⏹User manual (CD-ROM) x 1⏹Removable Terminal Block x 1⏹Wall-mount Kit (2 wall-mount brackets with screws) x 1Compare the contents of the industrial switch with the standard checklist above. If any item is damaged or missing, please contact the local dealer for service.24-Hour Technical Support: 1-800-260-1312 International: +1-952-358-360124-Hour Technical Support: 1-800-260-1312 International: +1-952-358-3601Hardware DescriptionIn this paragraph, the Industrial switch ’s dimensions, definitions for LED indicators, cabling information, and wiring installation will be described.Physical DimensionsThe PoE Industrial Switch dimensions (W x H x D) are 59.6mm x 152mm x 105mm as the figure shown below.LED IndicatorsThe diagnostic LED indicators located on the front panel of the industrial switch provide real-time system information and operation status. The table below provides the description status and definitions of the LED indicators for the switch.LED Indication Definition24-Hour Technical Support: 1-800-260-1312 International: +1-952-358-3601RJ-45 Pin AssignmentsThe UTP/STP ports will automatically sense for Fast Ethernet (10Base-T/100Base-TX) or Gigabit Ethernet (10Base-T/100Base-TX/1000Base-T) connection. Auto MDI/MDIX means that the switch can connect to another switch or workstation without changing straight through or crossover cabling. See the figures below for straight through and crossover cable schema.10/100Base-TX PinoutsNote “+” and “-” signs represent the polarity of the wires that make upeach wire pair.The table below shows the 10Base-T/100Base-TX MDI and MDI-X port pinouts.24-Hour Technical Support: 1-800-260-1312 International: +1-952-358-3601⏹10/100Base-TX Cable SchemaStraight Through Cable SchemaCrossover Cable Schema⏹10/100/1000Base-T PinoutsThe table below describes the gigabit Ethernet RJ-45 pinouts.10/100/1000Base-T Cable SchemaThe following two figures illustrate the 10/100/1000Base-T cable schema.Straight Through Cable SchemaCrossover Cable SchemaTransition Networks SISTP1040-242-LRT24-Hour Technical Support: 1-800-260-1312 International: +1-952-358-3601InstallationThis equipment is intended for use in a Pollution Degree 2 industrial environment.DIN-Rail MountingAssembling the DIN-Rail ClipThe DIN-rail clip is screwed on the industrial switch when out of factory. If not, please refer to the following steps to secure the DIN-rail clip on the switch.1. Use the included screws to secure the DIN-rail clip on the industrial switch.2. To remove the DIN-rail clip, reverse step 1.DIN-Rail ClipATTENTIONRear side of the SwitchHanging the Industrial SwitchFollow the steps below to hang the industrial switch on the DIN rail.1. First, position the rear side of the switch directly in front of the DIN rail. Make sure the top of the clip hooks over the top of the DIN rail.2. Push the unit downward.3. Check the DIN-Rail clip is tightly fixed on the DIN rail.4. To remove the industrial switch from the track, reverse the steps above.Wall MountingTo hang the Ethernet switch on the wall, please follow the steps below.1. Remove the DIN-rail clip.2. Prepare the two wall-mount plates and six screws included.3. Align the screw holes between the wall-mount plates and the unit as the figure illustrated.4. Secure the plates to the unit with the accompanying screws.24-Hour Technical Support: 1-800-260-1312 International: +1-952-358-360124-Hour Technical Support: 1-800-260-1312 International: +1-952-358-3601Grounding the Industrial SwitchFollow the instructions below to attach the industrial switch to ground.When installing the industrial switch, the ground connection must always be made first and disconnected last.1. On the top of the industrial switch, locate and remove the dome screw which has aground symbol beside it.2. Attach the ground wire to the screw hole with the dome screw.ATTENTIONWiring the Power InputsPlease follow the steps below to wire power lines from the terminal block to thecompliant external DC power source.1. Before wiring, make sure the power source is disconnected.2. Using the wire-stripping tool, strip a short piece of insulation from the output wires ofthe DC power source.3. Identify the positive and negative feed positions for the terminal block connection.See the symbols printed on the panel indicating the polarities and DC input powerrange in voltage.Plugs for Power 1 & Power 24. Insert the exposed wires into the terminal block plugs. Only wires with insulationshould extend from the terminal block plugs. Note that the polarities between thewires and the terminal block plugs must be positive to positive and negative tonegative.5.Use a slotted screwdriver to tighten the captive screws.Captive Screws for Fixing WiresUse Copper Conductors Only, 60/75 C, tightening to 5 lb-inThe wire gauge for the terminal block should be in the range between 12~ 18 AWG.24-Hour Technical Support: 1-800-260-1312 International: +1-952-358-3601Wiring the Fault Alarm ContactsThe fault alarm plugs are in the middle of the terminal block, as the left picture shown below. With a Normally Close circuit formed by wiring with an external power and a warning device (a buzzer or a flashing LED), system will detect the fault status including the port linking failure (managed industrial switch only) and the power failure. Please refer to the right picture below, a wiring example for the fault alarm application.Terminal Block Plugs for Fault Alarm Contacts24Vdc, 1AResistanceFault Alarm Wiring ExampleTransition Networks SISTP1040-242-LRTEthernet CablingUse the four twisted-pair, Category 5e or above cabling for RJ-45 port connection. The cable between the switch and the link partner (switch, hub, workstation, etc.) must be less than 100 meters (328 ft.) long.The small form-factor pluggable (SFP) is a compact optical transceiver used in optical communications for both telecommunication and data communication.Connecting the SFP PortTo connect the transceiver and LC cable, please take the steps shown as follows:First, insert the transceiver into the SFP slot. Notice that the triangle mark indicates the bottom of the slot.Transceiver to the SFP slot24-Hour Technical Support: 1-800-260-1312 International: +1-952-358-3601Transceiver InsertedSecond, insert the fiber cable of LC connector into the transceiver.LC connected to the transceiverDisconnecting the SFP PortTo remove the LC connector from the transceiver, please follow the steps shown below:First, press the upper side of the LC connector from the transceiver and pull it out to release.Remove LC connectorSecond, push down the metal loop and pull the transceiver out by the plastic part.Pull out from the SFP slot24-Hour Technical Support: 1-800-260-1312 International: +1-952-358-3601Troubleshooting⏹Verify that you are using correct or appropriate power cord/supplier/adapter. Pleasedon’t use a power supplier/adapter with a non-compliant DC output voltage, or it may damage the switch.⏹Select the proper UTP/STP cable to construct your network. Please check that youare using the right cable. Use unshielded twisted-pair (UTP) or shield twisted-pair (STP) cable for RJ-45 connections: 100ΩCategory 3, 4 or 5 cable for 10Mbps connections, 100ΩCategory 5 cable for 100Mbps connections, or 100ΩCategory 5e/above cable for 1000Mbps. Also be sure that the length of any twisted-pair connection does not exceed 100 meters (328 feet).⏹Diagnosing LED Indicators: To assist in identifying problems, the Switch can beeasily monitored through LED indicators on the front panel, which describe common problems the user may encounter and where the user can find possible solutions.⏹If the power indicator does not light on when the power cord is plugged in, usersmay have a problem with the power cord. Then check for loose power connections, power losses or surges at power outlet. If you still cannot resolve the problem, contact the local dealer for assistance.⏹If the Ethernet LED indicators are normal and the connected cables are correct butthe packets still cannot transmit, please check your system’s Ethernet devices’configuration or status.24-Hour Technical Support: 1-800-260-1312 International: +1-952-358-3601Transition Networks SISTP1040-242-LRT Technical Specifications24-Hour Technical Support: 1-800-260-1312 International: +1-952-358-3601。
Eaton 93PR 600kVA Modular UPS技术规范说明说明书
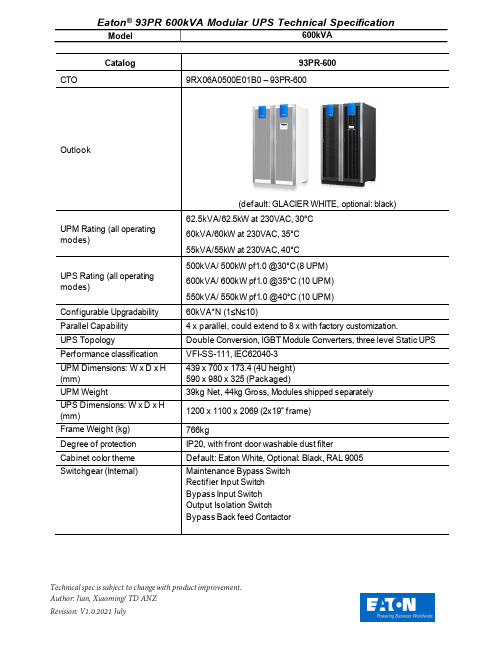
Technical spec is subject to change with product improvement.Catalog93PR-600CTO9RX06A0500E01B0 – 93PR-600 Outlook(default: GLACIER WHITE, optional: black)UPM Rating (all operating modes)62.5kVA/62.5kW at 230VAC, 30°C60kVA/60kW at 230VAC, 35°C 55kVA/55kW at 230VAC, 40°CUPS Rating (all operating modes)500kVA/ 500kW pf1.0 @30°C (8 UPM) 600kVA/ 600kW pf1.0 @35°C (10 UPM) 550kVA/ 550kW pf1.0 @40°C (10 UPM) Configurable Upgradability 60kVA*N (1≤N≤10)Parallel Capability 4 x parallel, could extend to 8 x with factory customization.UPS TopologyDouble Conversion, IGBT Module Converters, three level Static UPS Performance classification VFI-SS-111, IEC62040-3 UPM Dimensions: W x D x H (mm) 439 x 700 x 173.4 (4U height) 590 x 980 x 325 (Packaged)UPM Weight39kg Net, 44kg Gross, Modules shipped separately UPS Dimensions: W x D x H (mm)1200 x 1100 x 2069 (2x19” frame) Frame Weight (kg) 766kgDegree of protection IP20, with front door washable dust filter Cabinet color theme Default: Eaton White, Optional: Black, RAL 9005 Switchgear (Internal)Maintenance Bypass Switch Rectifier Input Switch Bypass Input Switch Output Isolation SwitchBypass Back feed ContactorTechnical spec is subject to change with product improvement.Cable entry Bottom/Top entry Ventilation Rear exhaustAccessoriesRear Chimney Kits Load Sync BoxENVIRONMENTAmbient storage temperature Range of -25 to +55℃ in the protective packageAmbient service temperature 0 to +40℃0 to +30℃ f ull load continuously 600kVA/550kW 0 to +30℃ f ull load continuously 600kVA/600kWMaximum service altitude 1000m above sea level. Maximum 2000m with 1% de-rating per each additional 100m aboveRelative humidity 5 to 95%, no condensation allowed Acoustic noise at 1m 65~75dBAElectromagnetic CompatibilityImmunity and emission to IEC/EN 62040-2 C3USER INTERFACE & COMMUNICATIONS Display7” Touchscreen Color display and 4 separate summary LEDs for system status, door mountedLED bars for long range view of system statusStandard Communication Ports 3x Mini-Slot, 1x EPO input (NC or NO), 1x Relay output (NO/NC), 5x Building Alarm inputs, 1x USB Host, 1xUSB Slave, 1x RS232 Service Port Connectivity OptionsWeb/SNMPRelay/RS232 Industrial RelayPXGMS Industrial Gateway Card support SNMP/Modbus/BACnetEarthing system compatibility TN, TN-S, TN-C, TN-C-S, TT (Three-phase, four-wire + PE) (Three-phase, three-wire, no neutral- optional) + PE)Rated input voltage and voltage tolerance Rectifier:230/400Vac nominal Tolerance: (-15%, +10%) at 100% load(-40%, +20%) at 50% load without battery discharge Bypass:230/400Vac nominalTechnical spec is subject to change with product improvement. ELECTRICAL OUTPUT CHARACTERISTICS Rated output voltage 230/400, three phasesOutput voltage variation <1% static load, 4% with 50ms recovery from 100% load step Crest factor3:1Rated output frequency 50Hz (default) or 60Hz Output frequency variation +/-0.1Hz with slew rate 1Hz/s Total output voltage distortion <1% linear load, <5% non-linear loadShort circuit capability2xIn @60kW Module, 60kW2xIn @55kW Module, 55kW 2.5xIn @50kW Module, 50kWFault clearing capability (withoutbypass)180A*N gL/gG fuse (N stands for installed UPM number)Overload capacity without bypass500kW (50kWx10): 60min >102–110% load 10min >111–125% load 60sec 126-150% load 300ms >150% load 600kW 10min >102–110% load30 Secs >111–125% load 10 Secs 126-150% load 300ms >150% load Overload capacity with bypass Continuous >100–115% load, 10ms 1000% load*Selected external Bypass fuses or breaker may limit the overload capabilityLoad power factor range 0.8 lagging to 0.8 leading without de-rating Range of frequency sync with bypass±4Hz as default. User settable 0.5 to 5 HzELECTRICAL OUTPUT CHARACTERISTICS - STORED ENERGY MODETransfer to/from stored energy No breakRated output voltage230/400Vac, three phasesTolerance: 196/340 – 253/438V (-15%, +10% of nominal)Operating frequency / tolerance 50 or 60Hz; Tolerance 40-72Hz Input current distortion <3% THD (Linear load condition at rated input current) Input power factor >0.99pf @ 20-100% load, >0.95 @ 10-20% load Inrush current<50ARectifier ramp-up, rectifier start and load step<100% of rated current. Rectifier ramp-up 10A/s (default), configurable, min.1A/sNumber of input phases 3 phases + Neutral* (3-wire version does not require neutral) Rated rectifier input current @ 400V752A @500kW 827A @550kW 905A @600kW Max. rectifier input current @ 400V950ABypass input current (rms @400V) Recommended/Maximum 722A (500kW) 794A (550kW) 870A (600kW)1050A (Maximum)Output voltage variation <2% static load, 4% with 50ms recovery from 100% load step Crest factor 3:1Rated peak output voltage 325V, +/-20VRated output frequency 50Hz (default) or 60HzOutput frequency variation ±0.005Hz (single module), ±0.07Hz (Parallel system)Total output voltage distortion 5%Short circuit capability 250Amp 400ms 250Amp 400msFault clearing capability 1400A gL/gG fuseOverload capability 550kW1min >102–110% load,10Sec >111–125% load,300ms >125% load600kW1 min >102–110% load300ms > 110%Load power factor range 0.8 lagging to 0.8 leading without de-ratingNumber of output phases 3 Phase + NeutralEFFICIENCY (Input/Output)55kW X 10 60kW X 10Linear Load 100% load: Efficiency, Double 75% load: Conversion Mode 50% load: @ 400V/50Hz 25% load:96%96.5%97%95.8%96%96.5%97%96%Heat Dissipation, double conversion mode @ 400V/50Hz 100% Load:75% load:50% load:25% load:22kW14.44kW9kW5.5kW24kW15.75kW9.9kW6kWLiner load efficiency ESS Mode 100% Load:75% load:50% load:25% load:99.2%99.2%99.0%98.4%99.2%99.2%99.0%98.6%Air Flow (m3/h)L/s 4846.313475025.41396BYPASS CHARACTERISTICSAutomatic bypass Static bypass switch, continuously rated, no break transfer Automatic bypass nominal rating Maximum 600kWAutomatic bypass thyristor i2tvalue2450000 A2sBypass fuse 1400AMPBack-feed protection Internal back-feed contactorSeparate bypass input feed Standard (single feed cable links fitted on site)Manual bypass switch (internal) StandardESS (Energy Saver System) MODE CHARACTERISTICSPerformance classification VFD, transferring to VFI (Double Conversion mode) if limits areTechnical spec is subject to change with product improvement.exceededTransfer time to doubleconversionMains available: No break (0ms), Mains failure: 2ms typicalAcceptable output voltagevariation±10% of nominal voltageAcceptable output freq. variation ±3HzUPS Audible Noise <65dBA @ 1m in 25℃ ambient temperatureStorm Detection UPS locks into double-conversion mode when three power linedisturbances have forced the unit to double-conversion three times(user adjustable) within a one-hour period (user adjustable)High Alert mode UPS will stay on double-conversion for one hour (user adjustable), afterwhich the unit willautomatically return to operate in ESS modeBATTERYBattery nominal voltage 432V (36 x 12V, 216 Cells) 50kW UPM 456V (38 x 12V, 228 Cells) 55kW UPM 480V (40 x 12V, 240 Cells) 60kW UPMFloat charge voltage 216 x 2.30V = 497Vdc 50kW UPM 228 x 2.30V = 524Vdc 55kW UPM 240 x 2.30V = 552Vdc 60kW UPMEnd of Discharge Voltage 216 x 1.67V = 360Vdc 50kW UPM 228 x 1.67V = 380Vdc 55kW UPM 240 x 1.67V = 400Vdc 60kW UPMMaximum charge voltage VRLA : 294 x 2.35V = 690Vdc (ABM enabled) Lithium : 700VdcBattery technology 2-wire, no central tapping requiredValve Regulated Lead Acid, Ni-Cad 5 or 10year design life Certified Lithium-ion batteryStored energy time No limitation within allowable ambient temperature.Charging current (Default/Maximum) Maximum 40Amp Per UPM, future extend to 60Amp by firmware upgradeRestored energy time to 90% Typically, 10 x Discharge timeBattery recharge profile Advanced Battery Management (ABM®) = 90% resting,10% floating/chargingVRLA Battery cut off voltage The total Battery voltage is limited by EOD1.67 to 1.75 VPC, Configurable or automatic (load adaptive)Battery cold start SupportCommon battery 2x UPS support common batteryBattery Trip +48V Shunt trip by default, +24 retrofittable by factory Battery Auxiliary Standard Equipped--- END ---Technical spec is subject to change with product improvement.。
热源产品参考指南说明书

THERMAL PRODUCTSProduct Range Guidetechnical support.Table of ContentsTemperature Probes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3RTD Sensors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4-5Thermistors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .6-7Precision Thermostats . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .8-9High Reliability Thermostats . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .10-11Commercial Thermostats . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .12-13Flexible Heaters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .14-15Humidity Sensors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .16-192 sensing .honeywell .com3SeriesLTPR300ES110Featuresprobes have durable, closed-tip designand accuracy; stainless steel constructiondesign, brass encapsulationSeriesES1205006655Temp. sensing type immersion air-gas/immersion-liquid level/air/surfaceFeaturesdesign, brass encapsulationresistance, and termination optionsinterchangeability, enhanced accuracy and response timeTemperature Sensors |Temperature ProbesSeriesHEL-700HEL-775Featuresrange, ceramic case material, multiple sizesceramic SIP, solderable leadsSeriesHEL-776/777700Featuresenhanced stability, thin film platinum, molded plastic SIP package, solderable leadsinterchangeability, SMD and chip package ver-sions, enhanced stability and time responseTemperature Sensors | RTD Sensorssensing .honeywell .com5SeriesHRTSTDFeaturesresistance interchangeable, accurate, fast, laser-trimmed, wide temperature rangeinterchangeable without recalibration, thin film, laser trimmed, air or liquid temperaturesensingTemperature Sensors | RTD SensorsSeries111112115120Description small, hermetically sealed glass bead large, hermetically sealed glass bead E-I tested and matched beads on mini glass probe Featuresand long-term stability, hermetically sealed in glass, micro size, welded platinum iridium leadstime, hermetically sealed in glass, small size, enhanced long-term stabilityinterchangeable pairs, extended life, compression-type glass hermetic seal,high pressure solder sealSeries140142143173Description small disc large disc large disc EIA 0805 surface Featuresrugged design, solder-able leadsrugged design, solder-able leadspc-board mountable, solderable leadsand reel, glass-coated ceramic, 0805 EIApackageTemperature Sensors | Thermistorssensing .honeywell .com7121126128129135standard glass probe matched large glass bead matched mini glass probe matched large glass probe glass encapsulated chip, DO-35 typeenhanced reliability and stability, weldable/solderable dumet leadsinterchangeability, enhanced sensitivity and reliability, small sizeinterchangeability, enhanced sensitivity and reliability, minia-ture sizeenhanced sensitivity, reliability, and stability; miniature sizeuniform dimensions, tape and reel175192194197ICLEIA 1206 surface mount,uni-curve with bare leads anduni-curve with insulated leads chip with bare leads and epoxy in-rush current limiter glass-coated ceramic, 1206 EIA packageinterchangeability, enhanced stability and life, epoxy coatedinterchangeability, enhanced stability and life, epoxy coated, teflon-coated leadscoatedtemp protective coating, rugged design, pc-board mountable1On a 2252 and 3000 Ohm part, diameter can be up to 3,05 mm [0.120 in] max.Series3000 Custom Packaged3100 Hermetic3100U REDI TEMPThermostats | Precision Thermostatssensing .honeywell .com3106 Low-level Hermetic 3150 LowSilhouette Hermetic3156 Low-levelSilhouette Hermetic3001/3004 SeriesNon-Hermetic9Series3200 Aerospace3153 LowSilhouette HermeticFeaturesNASA certified, space qualified, hermetically sealed, tight tolerances and differentials, pre-set and tamper proof, SPST contactshermetically sealed, tight tolerances and differen-tials, pre-set and tamper proof, SPST contacts* Based on 240 Vac and life-cycle dependent. Call for further details.Thermostats | High Reliability Thermostatssensing .honeywell .com113MS1 QPL35003800 Industrial-Grade3600/3601Custom-Packagedeach unit is 100% thermally and mechani-cally inspected, available to open or close on temperature rise, calibrations preset at factory, SPST contactstight tolerances and differentials,hermetically sealed, designed specifically for military and commercial aircraft, each unit is 100% thermally and mechanically inspectedeasily customized, used where high levels of vibration and mechanical shock are commongold contacts, available to open or close on temperature rise, specifically designed for PCBs, flexible circuitry, sophisticated time-based circuits, wave solderableSeries2450A2450CM2450CMGSeries2450RG2455R2455RAThermostats | Commercial Thermostatssensing .honeywell .com13 2450HR2450HRG2450R2450RC2450RCG2455RVB2455RC2455RG2455RMSeries78000Featuresno wires in clear view area, optical grade, thin film polyester, low power consumptionHeaters | Flexible Heaterssensing .honeywell .com15340031003200®®minimal thicknesswiresflat, molded-to-shape, spiral wrapSeriesHoneywell HumidIcon™ HIH6000Honeywell HumidIcon™ HIH6100Description digital output-type relative humidity (RH) and digital output-type relative humidity (RH) andHumidity Sensors | Honeywell Humidicon™sensing .honeywell .com17Honeywell HumidIcon™ HIH7000Honeywell HumidIcon™ HIH8000digital output-type relative humidity (RH) and digital output-type relative humidity (RH) andSeriesHIH-5030/5031HIH-4000Description covered, filtered or unfiltered integrated circuit integrated circuit Featuresnear linear voltage output vs. %RH, laser trimmed, molded thermoset plastic housing, chemically resis-tant, tape and reel near linear voltage output vs. %RH; laser trimmed, molded thermoset plastic housing, chemically resistantHumidity Sensors | Humiditysensing .honeywell .com19HIH-4010/4020/4021HIH-4030/4031HIH-4602-A, CHIH-4602-Lcovered or uncovered, filtered or unfiltered covered, filtered or unfiltered integrated monolithic IC with integral thermistor or integrated circuit near linear voltage output vs. %RH, laser trimmed, molded thermoset plastic housing, chemically resistant near linear voltage output vs. %RH, laser trimmed, molded thermoset plastic housing, chemically resistant, tape and reel humidity and temperature sensing in one package, near linear voltage output vs. %RH, laser trimmed, chemically resistant,built-in static protectionnear linear voltage output vs %RH, laser-trimmed, chemically resistant, enhancedaccuracy, fast responseHumidity Sensors Used in Wall Mount Transducers (Asia-Pacific Region Only)SCT Series009015-12-EN | 12 | 10/19© 2019 Honeywell International Inc . All rights reserved .Find out moreTo learn more about Honeywell’s sens-ing and switching products, call +1-815-235-6847, email inquiries to *********************, or visit Warranty/RemedyHoneywell warrants goods of its manufacture as being free of defective materials and faulty workmanship . Hon-eywell’s standard product warranty applies unless agreed to otherwise by Honeywell in writing; please refer to your order acknowledgement or consult your local sales office for specific warranty details . If warranted goods are returned to Honeywell during the period of coverage, Honeywell will repair or replace, at its option, without charge those items it finds defective . The foregoing is buyer’s sole remedy and is in lieu of all other warranties, expressed or implied, including those of merchantability and fitness for a par-ticular purpose. In no event shall Honeywell be liable for consequential, special, or indirect damages.While we provide application assistance personally, through our literature and the Honeywell web site, it is up to the customer to determine the suitability of the product in the application .Specifications may change without notice . The information we supply is believed to be accurate and reliable as of this printing . However, we assume no responsibility for its use .Honeywell Sensing and Internet of Things 9680 Old Bailes Road Fort Mill, SC 29707 。
Performance-PRO

Performance-PRO™ XT manual ambulance cotHead and Foot end Lift and Grip SectionAdjustable Load Height Side Release Handle Performance-PRO XT’s three-position adjustable load height accommodates multiple ambulance heights and encourages proper body mechanics when loading and unloading. The optional XPS siderails increase surface area of the cot by a maximum of 38%, offering a solution for patients of a variety of sizes. The retractable head section allows for 360° mobility in any height position for maximum versatility. Duplicated head and foot end lift and grip controls provide ergonomic lifting positions that accommodate caregivers of different sizes.As a medic, the unknown is everywhere. Uncertain situations can arise on every call. We have the power to help prepare for uncertainty. Introducing, our Stryker Performance-PRO XT ambulance cot. Its aluminum construction and 700 lb weight capacity afford a lightweight and versatile manual ambulance cot with enhanced stability. Versatility. It’s a powerful thingThe Performance-PRO XT is our tough, aluminum manual X-frame cot offering. Versatility, proven performance, andincreased stability define our Performance-PRO XT cot.Performance-PRO ™XT manual ambulance cot• Lift-capable safety bar assures handling confidence. Reduces lift height for smaller operators.• Hand clearance around the litter frame allows for operator safety.• Adjustable load height industry-exclusive, three position settable load height adjusts to different ambulance heights.• Built-in pull handle offers maximum operator control during transport and stows out of the way when not in use.Key features700LB38%up to360o*700 lb weight capacity with an unassisted lift capacity of 500 lb (Cot loads over 300 lb (136 kg) may require additional assistance to meet the set cot load height).Shock, Flat Leg, or Optional Knee Gatch Positioning Knee gatch provides patientcomfort and greater lift clearance.XPSAdjustable with sevenlocking positions and includes a wider mattress that reduces transfer gap and designed with patient comfort in mind.Foot end ControlsControls are duplicated on upper and lower lift bars to accommodate operators of all sizes.Pneumatically assisted BackrestA Stryker innovation. Significantly reduces operator effort and increases patient comfort.Retractable Head Section Retractable head sectionprovides 360-degree mobility in any height position.Aluminum X-frame Patented, provenreliability under the most demanding conditions.X-Restraint Package Meets SAE J3027 dynamic crash test safety standards.Technical SupportStryker Technical Support comprises a team of professionals available to help with your Performance-LOAD needs. Contact via *******************************************************.ProCare Service from StrykerWith maintenance, service and work-flow solutions that proactively maintain your equipment, we help you get every last penny out of your investment. Two-hour priority response callback time and 24- to 72-hour product turnaround help you focus more on your patients and less on equipment upkeep.Flex Financial ProgramOur financial programs provide a range of smart alternatives designed to fit your organization’s needs. We offer flexibility beyond a cash purchase with payment structures customizable to meet budgetary needs and help to build long-term financial stability. Specialized finance solutions for municipalities and other government agency businesses are also available.To learn more about the wide range of financial services, call 1 888 308 3146.SpecificationsModel Number 6086Height 1Position 1 13.8 in (35.1 cm) Position 2 22 in (55.9 cm) Position 3 25.8 in (66.5 cm) Position 4 28.1 in (71.4 cm) Position 5 31.9 in (81 cm) Position 6 34.6 in (87.9 cm) Position 7 37.3 in (94.7 cm) Position 8 40 in (101.6 cm) Position 942.2 in (107.2 cm)Load Height Adjustment High Deck heights 34 in (86 cm) and aboveMid Deck heights between 30 – 34 in (76 – 86 cm) Low Deck heights below 30 in (76 cm)LengthStandard 80 in (203 cm) Minimum 64 in (163 cm)Width 23 in (58 cm)Weight 2 89 lb (40.37 kg)Wheels Diameter 6 in (15 cm) Width 2 in (5 cm)ArticulationBackrest 0 –73°Shock Position +15° Optional Knee Gatch 30°Maximum Weight Capacity 700 lb (318 kg)Minimum Operator Required Occupied Cot 2 Unoccupied Cot1Recommended Fastener System Power-LOAD Model 6390Floor Mount Model 6370 or 6377 Wall MountModel 6371Recommended Loading Height 3Up to 34 in (86.4 cm)1Height measured from bottom of mattress, at seat section, to ground level.2Cot is weighed without mattress and restraints.3Load height can be set between 27.25 in and 34 in.Stryker reserves the right to change specifications without notice. In-service video included with every order.The Performance-PRO XT is designed to conform to the Federal Specification for the Star-of-Life Ambulance KKK-A-1822.The Performance-PRO XT is designed to be compatible with competitive cot fastener systems.The yellow and black color sceme is a registered trademark of Stryker Corporation.Meets dynamic crash standards with Performance-LOAD cot fastening system (SAE J3027 with X-restraints).Stryker Corporation or its divisions or other corporate affiliated entities own, use or have applied for the following trademarks or service marks: Flex Financial, Performance Pro, Power-LOAD, ProCare Stryker, . All other trademarks are trademarks of their respective owners or holder.Mkt Lit-1458 18 JAN 2017 Rev A.2 Copyright © 2017 Stryker Printed in U.S.A.。
ISO_TS16949

Q3 1997 Q4 1997
Automotive manufacturers QS 9000,VDA6, AVSQ,EAQF
Short term harmonization
New ISO/TC
176 Task group
Q1 1998 ISO 9001:1994
Generic quality system basis
Q4 1998
Published ISO Technical
Report
Broaden manufacturer membership
YEAR 2000
(or as aligned with publication of the revised ISO 9001)
Draft development
ISO /TC 176 ballot of Technical Report Published ISO Technical Report
Draft development
Q3 1998 ISO /TC 176 ballot of
Technical Report
Representatives from TC 176 SC1, SC2, SC3
Long term alignment ISO 9001:2000
Broaden manufacturer membership
ISO/TS 16949
ISO/TS 16949
T h e " I n t e r n a t i o n a l A u t o m o t i v e T a s k F o r c e "
G e r m a n y
M e r c e d e s B e n z B M W V W / A u d i B o s c h
第三代核电相关英汉词汇
Quality Audit
质量监查
PQAP
Project Quality Assurance Plan
项目质量保证大纲
QAP
Quality Assurance Program
质保程序
Technology Transfer
技术转让
Task Package
任务包
Technical Services
中国国家技术进出口公司(中技)
CNNC
China National Nuclear Corporation
中国核工业集团公司
CGNPC
China Guangdong Nuclear Power Holding Co. Ltd.
中国广东核电集团有限公司
SNPTC
State Nuclear Power Technology Corporation of China
钢筋笼预制
High Climbing Formworks
爬升模板
Self-Compacting Concrete
自密实砼
Low Heat Hydration
低水化热
Large Concrete
大体积砼
ForeignSpecialist
外方专家
Expartriate Expert/Specialist
中国核工业华兴公司
China Nuclear Industry 5thInstallationn Corporation
中国核工业五公司
SNERDI
Shanghai Nuclear Engineering Research & Design Institute
上海核工程研究设计院(728院)
化工专业英文词汇
化学专业课程中英文对照普通化学General Chemistry分析化学Analytical Chemistry有机化学Organic Chemistry物理化学Physical Chemistry谱学导论Introducton of Spectroscopy无机化学Inorganic Chemistry普通化学和分析化学实验Experiments of General and Analytical Chemistry现在基础化学The Principle of Mordern Chemistry现在基础化学实验Experiments of Modern Fundamental Chemistry有机化学实验Experiments of Organic Chemistry仪器分析和物理化学实验Experiments of Instrumental Analysis and Physical Chemistry合成化学实验Experiments of Synthetic Chemistry现代化学专题Topic of Modern Chemistry化学综合实验Experiments of Comprehensive Chemistry化工原理Principle of Chemical Engineering化工原理实验Experiments of Chemical Engineering应用化学实验Experiments of Applied Chemistry无机合成化学Synthetic Inorganic Chemistry近代分析化学Modern Analytical Chemistry分离分析化学Separation Analytical Chemistry有机化合物波谱鉴定Spectrum Identification of Organic Compounds有机合成及反应机理Organic Synthesis and Mechanics化学进展Progress in Chemistry化学反应工程Chemical Reaction Engineering应用电化学Applied Electrochemistry工业催化Industrial Catalysis环境化学Environmental Chemistry环境监测Environmental Monitoring化学科技英语Scientific English for Chemistry数理方法在化学中的应用Mathematical Statistics for Chemistry化工制图Chemical Engineering Cartography计算机与化学测量实验Computer and Chemical Measurement化学信息学Chemoinformatics or Chemical Informatics应用化学专题Special Topics in Applied Chemistry化工装置常用词汇1一概论 introduction方案(建议书) proposal可行性研究 feasibility study方案设计 concept design工艺设计 process design基础设计 basic design详细设计 detail design开工会议 kick-off meeting审核会议 review meeting外商投资 foreign investment中外合资 joint venture中外合营 joint venture补偿贸易 compensation trade合同合同附件 contract卖方 vendor买方 buyer顾客 client承包商 contractor工程公司 company供应范围 scope of supply生产范围 production scope生产能力 production capacity项目 project界区 battery limit装置 plant公用工程 utilities工艺流程图 process flow diagram工艺流程方块图 process block diagram管道及仪表流程图 piping and instrument drawing物料及热量平衡图 mass & heat balance diagram蒸汽及冷凝水平衡图 steam & condensate balance diagram 设备布置图 equipment layout设备表 equipment list成品(产品) product(final product)副产品 by-product原料 raw-material设计基础数据 basic data for design技术数据 technical data数据表 data sheet设计文件 design document设计规定 design regulation现场服务 site service项目变更 project change用户变更 client change消耗定额 consumption quota技术转让 technical transfer技术知识 technical know-howtechnical knowledge技术保证 technical guarantee咨询服务 consultative services技术服务 technical services工作地点 location施工现场 construction field报价 quotation标书 bidding book公司利润 company profit固定价合同 fixed price contract固定单价合同 fixed unit price contract成本加酬金合同 cost plus award fee contract 定金 mobilization银行保证书 bank guarantee letter保留金 retention所得税 income taxes特别承包人税 special contractor's taxes城市和市政税 city and municipal taxes工作手册 work manual工作流程图 work flow diagram质量保证程序 QA/QC procedures采购计划 procurement plan施工计划 construction plan施工进度 construction schedule项目实施计划 project execution plan项目协调程序 project coordination procedure 项目总进度计划 project master schedule设计网络计划 engineering network logic项目质量保证 project quality assurance项目质量控制 project quality control采购 procurement采购周期 procurement period会签 the squad check计算书 calculation sheets询价 inquiry检验 inspection运输 transportation开车 start up / commission验收 inspection & acceptance校核 check审核 review审定 approve版次 version部门 department专业 specialty项目号 project number图号 drawing number目录 contents序言 foreword章 chapter节 section项 itemMR material requisitionSPEC engineering specificationDATA SHEET(技术表) technical data sheetTBA(技术评标) technical bid analysisPDP preliminary design packagePM (项目经理) project managerLDE(专业负责人) lead discipline engineerMRQ(材料询价单) Material requisition for quotationMRP(材料采购单) material requisition for purchaseBEP(基础工程设计包) basic engineering packageP&ID(管道及仪表流程图) piping and instrument drawing(diagram) PFD process flow diagramNNF normally no flowFO failure openFC failure closeC/S/A civil/structure/architectureDDP(详细设计阶段) detail design phase二. 工艺流程连续过程 continuous process间歇过程 batch process工艺叙述 process description工艺特点 process feature操作 operation反应 reaction副反应 side reaction絮凝 flocculation浮洗 flotation倾析 decantation催化反应 catalytical reaction萃取 extraction中和 neutralization水解 hydrolysis过滤 filtration干燥 drying还原 reduction氧化 oxidation氢化 hydrogenation分解 decomposition离解 dissociation合成 synthetics吸收 absorption吸附 adsorption解吸 desorption结晶 crystallization溶解 solution调节 modulate控制 control悬浮 suspension循环 circulation再生 regeneration再活化 reactivation沥取 leaching破碎 crushing煅烧 caloination沉降 sedimentation沉淀 precipitation气化 gasification冷冻 refrigeration固化、结晶 solidification 包装 package升华 sublimation燃烧 combustion引烧 ignition蒸馏 distillation碳化 carbonization压缩 compression三、化学物质及特性固体 solid液体 liquid气体 gas化合物 compound混合物 mixture粉 powder片状粉未 flake小粒 granule结晶 crystal乳化物 emulsion氧化物 oxidizing agent 还原剂 reducing agent有机物 organic material 真空 vacuum母液 master liquor富液 rich liquor贫液 lean liquor萃出物 extract萃余物 raffinate絮凝剂 flocculants冷冻盐水 brine酸度 acidity浓度 concentration碱度 alkalinity溶解度 solubility凝固点 solidificalion point沸点 boiling point熔点 melting point蒸发率 evaporation rate粘度 viscosity吸水的 water absorbent(a)无水的 anhydrous(a)外观 appearance无色的 colorless(a)透明的 transparent(a)半透明的 translucent密度 density比重 specific gravity催化剂 catalyst燃烧 combustion引燃 ignition自然点 self-ignition temperature可燃气体 combustible gas可燃液体 inflammable liquid易燃液体 volatile liquid爆炸混合物 explosive mixture爆炸性环境 explosive atmosphere(environment) 爆炸极限 explosive concentration limit废水 waste water废液 waste liquid废气 off-gas噪声 noise pollution成分 composition挠度 deflection力和力矩 force and moment弯矩 bending moment应力-应变曲线 stress-strain diagram百分比 percentage环境温度 ambient temperature工作温度 operating设计温度 design temperature(pressure)相对湿度 RH=relative humidity油渣、淤泥 sludge杂质 impurity四、化工设备泵 pump轴流泵 axial flow pump真空泵 vacuum pump屏蔽泵 canned pump柱塞泵 plunger pump涡轮泵 turbine pump涡流泵 vortex pump离心泵 centrifugal pump喷射泵 jet pump转子泵 rotary pump管道泵 inline pump双作用往复泵 double action reciprocating pump计量泵 metering pump深井泵 deep well pump齿轮泵 gear pump手摇泵 hand(wobble) pump螺杆泵 screw (spiral) pump潜水泵 submersible pump斜转子泵 inclined rotor pump封闭式电磁泵 hermetically sealed magnetic drive pump 气升泵 air-lift-pump轴承 bearing叶轮 impeller虹吸管 siphon高压容器 high pressure vessel焚化炉 incinerator火焰清除器 flame arrester工业炉 furnace烧嘴 burner锅炉 boiler回转窑 rotary kiln加热器 heater电加热器 electric heater冷却器 cooler冷凝器 condenser换热器 heat exchanger反应器 reactor蒸馏釜 still搅拌器 agitator混合器 mixer静态混合器 static mixers管道混合器 line mixers混合槽 mixing tanks破碎机 crusher磨碎机 grinder研磨机 pulverizer球磨机 ballmill过滤器 filter分离器 separator干燥器 drier翅片 fins烟囱 stack火炬 flare筛子 screen煅烧窑 calciner倾析器 decanter蒸发器 evaporator再沸器 reboiler萃取器 extractor离心机 centrifuger吸附(收)器 adsorber结晶器 crystallizer电解槽 electrolyzer电除尘器 electric precipitator洗涤器 scrubber消石灰器 slaker料仓 bin料斗 hopper加料器 feeder增稠器 thickener澄清器 clarifier分级器 classifier浮洗器 flocculator废液池 sump喷射器 ejector喷头 sprayer成套设备 package unit仪器设备 apparatus附属设备 accessory旋转式压缩机 rotary compressor往复式压缩机 reciprocating compressor水环式压缩机 nash compressor螺杆式压缩机 helical screw compressor离心式压缩机 centrifugal compressor多级压缩机 mutiple stages compressor固定床反应器 fixed bed reactor流化床反应器 fluidized bed reactor管式反应器 tubular reactor列管式换热器 tubular heat exchanger螺旋板式换热器 spiral plate heat exchanger 萃取塔 extraction column板式塔 plate column填料塔 packed column洗涤塔 scrubber吸收塔 absorber冷却塔 cooling tower精馏塔 fractionating tower汽提塔 stripper再生塔 regenerator造粒塔 prill tower塔附件 tower accessories液体分配(布)器 liquid distributor填料支持板 support plate定距管 spacer降液管 downcomer升气管 chimney顶(底)层塔盘 top (bottom) tray挡板 baffle抽出口 draw nozzle溢流堰 weir泡罩 bubble cap筛板 sieve plate浮阀 float valve除沫器 demister pad塔裙座 skirt椭圆封头 elliptical head高位槽 head tank中间槽 intermediate tank加料槽 feed tank补给槽 make-up tank计量槽 measuring tank电解槽 cell溜槽 chute收集槽 collecting tank液滴分离器 knockout drum稀释罐 thinning tank缓冲罐 surge drum回流罐 reflux drum闪蒸罐 flash drum浮顶罐 floating roof tank内浮顶罐 covered floating roof tank球罐 spheroid气柜 gas holder湿式气柜 wet gas-holder干式气柜 dry gas-holder螺旋式气柜 helical gas-holder星型放料器,旋转阀 rotary valve抽滤器 mutche filter压滤器 filter press压滤机 pressure filter板框压滤器 plate-and-fram filter press转鼓过滤器 rotary drum filter带式过滤器 belt filter翻盘式过滤器袋滤器 bag filter旋风分离器 cyclone separator盘式干燥箱 compartment tray drier真空干燥器 vacuum drier隧道式干燥器 tunnel drier回转干燥器 rotary drier穿流循环干燥器 through circulation drier 喷雾干燥器 spray drier气流干燥器 pneumatic conveyor drier圆盘式加料器 dish feeder螺旋式加料器 screw feeder颚式破碎机 jaw crusher回转破碎机 gyratory crusher滚洞破碎机 roll crusher锤式破碎机 hammer crusher冲击破碎机 rotor impact breaker气流喷射粉碎机 jet pulverizer棍磨机 rod mill雷蒙机 raymond mill锤磨机 hammer mill辊磨机 roller mill振动筛 vibrating screen回转筛 rotary screen风机 fan罗茨鼓风机 root's blower起重机 crane桥式起重机 bridge crane电动葫芦 motor hoist发电机 generator电动机 motor汽轮机 steam turbine五、管道工程 piping engineering1 阀门 valve阀杆 stem内螺纹阀杆 inside screw阀座 valve seat (body seat)阀座环、密封圈 sealing ring阀芯(包括密封圈,杆等) trim阀盘 disc阀体 body阀盖 bonnet手轮 hand wheel手柄 hand level (handle)压盖 gland闸阀 gate valve平行双闸板 double disc parallel seat楔形单闸板 split wedge截止阀 globe valve节流阀 throttle valve针阀 needle valve角阀(角式截止阀) angle valveY型阀(截止阀) Y-valve(Y-body globe valve)球阀 ball valve三通球阀 3-way ball valve蝶阀 butterfly valve对夹式(薄片型) wafer type偏心阀板蝶阀 offset disc (eccentric) butterfly valve 斜阀盘蝶阀 canted disc butterfly valve连杆式蝶阀 link butterfly valve止回式蝶阀 combined non-return butterfly valve柱塞阀 piston type valve旋塞阀 plug valve三通旋塞阀 three-way plug valve四通旋塞阀 four-way plug valve旋塞 cock衬套旋塞 sleeve cock隔膜阀 diaphragm valve橡胶衬里隔膜阀 rubber lined diaphragm valve直通式隔膜阀 straight way diaphragm valve夹紧式胶管阀 pinch valve止回阀 check valve升降式止回阀 lift check valve旋启式止回阀 swing check valve落球式止回阀 ball check valve弹簧球式止回阀 spring ball check valve底阀 foot valve切断式止回阀 stop check valve活塞式止回阀 piston check valve翻板止回阀 flap check valve蝶式止回阀 butterfly check valve安全泄气阀 safety[SV]安全泄放阀 relief valve[RV]安全泄压阀 safety relief valve杠杆重锤式 lever and weight type罐底排污阀 flush-bottom tank valve波纹管密封阀 bellow sealed valve电磁阀 solenoid (operated) valve电动阀 electrically(electric-motor)operated valve气动阀 pneumatic operated valve低温用阀 cryogenic service valve蒸汽疏水阀 steam trap机械式疏水阀 mechanical trap浮桶式疏水阀 open (top) bucket trap浮球式疏水阀 float trap倒吊桶式疏水阀 inverted bucket trap自由浮球式疏水阀 loose float trap恒温式疏水阀 thermostatic trap压力平衡式恒温疏水阀 balanced pressure thermostatic trap 热动力式疏水阀 thermodynamic trap脉冲式蒸汽疏水阀 impulse steam trap放汽阀(自动放汽阀) (automatic) air vent valve换向阀 diverting (reversing) valve呼吸阀 breather valve减压阀 pressure reducing valve控制阀 control valve执行机构 actuator差压调节阀 differential pressure regulating valve切断阀 block (shut-off, stop) valve调节阀 regulating valve快开阀 quick opening valve快闭阀 quick closing valve隔断阀 isolating valve三通阀 three way valve夹套阀 jacketed valve非旋转式阀 non-rotary valve2管子,管件,法兰管子 pipe(按标准制造的配管用管)tube(不按标准规格制造的其它用管)钢管 steel pipe铸铁管 cast iron pipe衬里管 lined pipe复合管 clad pipe碳钢管 carbon steel[C.S.]pipe合金钢管 alloy steel pipe不锈钢管 stainless steel[S.S.]pipe奥氏体不锈钢管 austenitic stainless steel pipe铁合金钢管 ferritic alloy steel pipe轧制钢管 wrought-steel pipe锻铁管 wrought-iron pipe无缝钢管 seamless[SMLS] steel pipe焊接钢管 welded steel pipe电阻焊钢管 electric-resistance-welded steel pipe电熔(弧)焊钢板卷管 electric-fusion(arc)-welded steel-plate pipe 螺旋焊接钢管 spiral welded steel pipe镀锌钢管 galvanized steel pipe排污阀 blowdown valve集液排放阀 drip valve排液阀 drain valve放空阀 vent valve卸载阀 unloading valve排出阀 discharge valve吸入阀 suction valve取样阀 sampling valve手动阀 hand operated(manually-operated) valve(水)龙头 bibb;bib;faucet抽出液阀(小阀) bleed valve旁路阀 by-pass valve软管阀 hose valve混合阀 mixing valve破真空阀 vacuum breaker冲洗阀 flush valve根部阀 root (primary, header) valve水煤气钢管 water-gas steel pipe塑料管 plastic pipe玻璃管 glass tube橡胶管 rubber tube壁厚 wall thickness[WT]壁厚系列号 schedule number[SCH.NO.]加厚的,加强的 extra heavy (strong)双倍加厚的,双倍加强的 double extra heavy (strong) 弯头 elbow异径弯头 reducing elbow长半径弯头 long radius elbow短半径弯头 short radius elbow长半径180°弯头 long radius return短半径180°弯头 short radius return三通 tee异径三通 reducing tee等径三通 straight tee带支座三通 base tee45°斜三通 45°lateralY型三通 true"Y"四通 cross异径管 reducer同心异径管 concentric reducer偏心异径管 eccentric reducer管接头 coupling;full coupling活接头 union短管 nipple预制弯管 fabricated pipe bendU型弯管 "U"bend法兰端 flanged end万向接头 universal joint对焊的 butt welded[BW]螺纹的 threaded[THD]承插焊的 socket welded[SW]法兰 flange[FLG]整体管法兰 integral pipe flange钢管法兰 steel pipe flange螺纹法兰 threaded flange滑套法兰 slip-on flange平焊法兰 slip-on-welding flange承插焊法兰 socket welding flange松套法兰 lap joint flange[LJF]对焊法兰 weld neck flange[WNF]法兰盖 blind flange;blind异径法兰 reducing flange压力级 pressure rating(class)突面 raised face[RF]凸面 male face凹面 female face全平面;满平面 flat face;full face[FF]3.管道特殊件 piping speciality粗滤器 strainer过滤器 filter临时过滤器 temporary strainer(cone type) Y型过滤器 Y-type strainerT型过滤器 T-type strainer永久过滤器 permanent filter洗眼器及淋浴器 eye washer and shower 视镜 sight glass阻火器 flame arrester喷咀;喷头 spray nozzle喷射器 ejector取样冷却器 sample cooler消音器 silencer膨胀节 expansion joint波纹膨胀节 bellow补偿器 compensator软管接头 hose connection[HC]快速接头 quick coupling金属软管 metal hose橡胶管 rubber hose挠性管 flexible tube特殊法兰 special flange漏斗 funnel8字盲板 spectacle (figure 8) blind爆破板 rupture disk4,其它材料碳素钢 carbon steel [C.S.]不锈钢 stainless steel[S.S.]铸铁 cast iron[C.I.]铝 aluminum铜,紫铜 copper钛 titanium抗拉强度 tensile strength非金属材料 non-metallic material塑料 plastic陶瓷 ceramic搪瓷 porcelain enamel玻璃 glass橡胶 rubber垫片 gasket[GSKT]平垫片 flat gasket填料 packing型钢 shaped steel角钢 angle steel槽钢 channel工字钢 I-beam宽缘工字钢或H钢 wide flanged beam扁钢 flat bar圆钢 round steel; rod钢带 strap steel网络钢板 checkered plate材料表 bill of material[BOM]材料统计 material take-off[MTO]散装材料 bulk material综合管道材料表 consolidated piping material summary sheet[CPMSS]汇总表 summary sheet5.设备布置及管道设计中心线 center line装置边界 boundary limit[BL]区界 area limit设备布置 equipment arrangement (layout);plot plan标高,立面 elevation[EL]支撑点 point of support[POS]工厂北向 plant north方位 orientation危险区 hazardous area classification净正吸入压头 net positive suction head绝对标高 absolute elevation坐标 coordinate管道研究 piping study管道布置平面 piping arrangement plan[PAP]管道布置 piping assembly; layout详图 detail"X"视图 view "X""A-A" 剖视 section "A-A"轴测图 isometric drawing索引图 key plan管道及仪表流程图 piping and instrument diagram[P&ID]管口表 list of nozzles地上管道 above ground piping 地下管道 under ground piping 管线号 line number总管 header; manifold旁路 by pass常开 normally open常闭 normally closed取样接口 sampling connection 伴热管 tracing pipe蒸汽伴热 steam tracing热水伴热 hot-water tracing电伴热 electrical tracing夹套管 jacketed line全夹套管 full jacketed比例 scale图 figure草图 sketch图例 legend符号 symbol件号 part n。
技术支持工程师英文求职信及译文
技术支持工程师英文求职信及译文这是一篇由网络搜集整理的关于技术支持工程师英文求职信及译文的文档,希望对你能有帮助。
技术支持工程师英文求职信范文My name is Zhao Wanjun. Wanjun is my given name. Wan means sweet and Jun means person, so my name means a sweet-tempered girl. I actually am! But you can call me June, for your convenience, j-u-n-e, it's similar to my Chinese name Jun. I am from Enping, a small city in the southwest of Guangdong Province, near HongKong and Macao. Maybe you have never been there before, it's well known for the hot springs there.In XX, I got the highest score in the College Entrance Examinations in my city and entered Zhongshan University. My major is Computer Science. My GPA ranks in the top 40% among all students, but I have stronger C++ programming skills than many others. Also, I was the first one to learn Java in my class.I was chosen by a teacher of mine to participate in his project. The project was about a LAN chat room, and I developed the instant messaging system in it.I was the only female student in this project team.Besides study and the project, I worked in the Student Union for two years, first year as a member, next year promoted to be the General Secretary. My colleagues describe me as a reliable and considerate person.IBM is top on my job hunting list for of the reasons you hear every day. Ilook forward to joining a famous company as it means good training, good pay, and good people to work with, just like you gentlemen!Technical Support Engineer is my ideal job because I have both a technical background and the abil ity to deal with clients. Also, traveling isn’t a problem although I am a woman. (备注:如果面对老外面试官,则不谈性别。
化工常用英语词汇【精选文档】
化工专业英语词汇化学专业课程中英文对照一、化工装置常用词汇一概论 introduction方案(建议书) proposal可行性研究 feasibility study 方案设计 concept design工艺设计 process design基础设计 basic design详细设计 detail design开工会议 kick-off meeting审核会议 review meeting外商投资 foreign investment 中外合资 joint venture中外合营 joint venture补偿贸易 compensation trade 合同合同附件 contract卖方 vendor买方 buyer顾客 client承包商 contractor工程公司 company供应范围 scope of supply生产范围 production scope 生产能力 production capacity 项目 project界区 battery limit装置 plant公用工程 utilities工艺流程图 process flow diagram工艺流程方块图 process block diagram管道及仪表流程图 piping and instrument drawing物料及热量平衡图 mass &heat balance diagram蒸汽及冷凝水平衡图 steam &condensate balance diagram 设备布置图 equipment layout设备表 equipment list成品(产品) product(final product)副产品 by-product原料 raw-material设计基础数据 basic data for design技术数据 technical data数据表 data sheet设计文件 design document设计规定 design regulation现场服务 site service项目变更 project change用户变更 client change消耗定额 consumption quota技术转让 technical transfer技术知识 technical know—howtechnical knowledge技术保证 technical guarantee咨询服务 consultative services技术服务 technical services工作地点 location施工现场 construction field报价 quotation标书 bidding book公司利润 company profit固定价合同 fixed price contract固定单价合同 fixed unit price contract成本加酬金合同 cost plus award fee contract 定金 mobilization银行保证书 bank guarantee letter保留金 retention所得税 income taxes特别承包人税 special contractor's taxes城市和市政税 city and municipal taxes工作手册 work manual工作流程图 work flow diagram质量保证程序 QA/QC procedures采购计划 procurement plan施工计划 construction plan施工进度 construction schedule项目实施计划 project execution plan项目协调程序 project coordination procedure 项目总进度计划 project master schedule设计网络计划 engineering network logic项目质量保证 project quality assurance项目质量控制 project quality control采购 procurement采购周期 procurement period会签 the squad check计算书 calculation sheets询价 inquiry检验 inspection运输 transportation开车 start up / commission验收 inspection & acceptance校核 check审核 review审定 approve版次 version部门 department专业 specialty项目号 project number图号 drawing number目录 contents序言 foreword章 chapter节 section项 itemMR material requisitionSPEC engineering specificationDATA SHEET(技术表) technical data sheetTBA(技术评标) technical bid analysisPDP preliminary design packagePM (项目经理) project managerLDE(专业负责人) lead discipline engineerMRQ(材料询价单) Material requisition for quotationMRP(材料采购单) material requisition for purchaseBEP(基础工程设计包) basic engineering packageP&ID(管道及仪表流程图) piping and instrument drawing(diagram) PFD process flow diagramNNF normally no flowFO failure openFC failure closeC/S/A civil/structure/architectureDDP(详细设计阶段) detail design phase二、工艺流程连续过程 continuous process间歇过程 batch process工艺叙述 process description工艺特点 process feature操作 operation反应 reaction副反应 side reaction絮凝 flocculation浮洗 flotation倾析 decantation催化反应 catalytical reaction萃取 extraction中和 neutralization水解 hydrolysis过滤 filtration干燥 drying还原 reduction氧化 oxidation氢化 hydrogenation分解 decomposition离解 dissociation合成 synthetics吸收 absorption吸附 adsorption解吸 desorption结晶 crystallization溶解 solution调节 modulate控制 control悬浮 suspension循环 circulation再生 regeneration再活化 reactivation沥取 leaching破碎 crushing煅烧 caloination沉降 sedimentation沉淀 precipitation气化 gasification冷冻 refrigeration固化、结晶 solidification 包装 package升华 sublimation燃烧 combustion引烧 ignition蒸馏 distillation碳化 carbonization压缩 compression三、化学物质及特性固体 solid液体 liquid气体 gas化合物 compound混合物 mixture粉 powder片状粉未 flake小粒 granule结晶 crystal乳化物 emulsion氧化物 oxidizing agent还原剂 reducing agent有机物 organic material真空 vacuum母液 master liquor富液 rich liquor贫液 lean liquor萃出物 extract萃余物 raffinate絮凝剂 flocculants冷冻盐水 brine酸度 acidity浓度 concentration碱度 alkalinity溶解度 solubility凝固点 solidificalion point 沸点 boiling point熔点 melting point蒸发率 evaporation rate粘度 viscosity吸水的 water absorbent(a)无水的 anhydrous(a)外观 appearance无色的 colorless(a)透明的 transparent(a)半透明的 translucent密度 density比重 specific gravity催化剂 catalyst燃烧 combustion引燃 ignition自然点 self-ignition temperature可燃气体 combustible gas可燃液体 inflammable liquid易燃液体 volatile liquid爆炸混合物 explosive mixture爆炸性环境 explosive atmosphere(environment)爆炸极限 explosive concentration limit废水 waste water废液 waste liquid废气 off-gas噪声 noise pollution成分 composition挠度 deflection力和力矩 force and moment弯矩 bending moment应力-应变曲线 stress—strain diagram百分比 percentage环境温度 ambient temperature工作温度 operating设计温度 design temperature(pressure)相对湿度 RH=relative humidity油渣、淤泥 sludge杂质 impurity四、化工设备泵 pump轴流泵 axial flow pump真空泵 vacuum pump屏蔽泵 canned pump柱塞泵 plunger pump涡轮泵 turbine pump涡流泵 vortex pump离心泵 centrifugal pump喷射泵 jet pump转子泵 rotary pump管道泵 inline pump双作用往复泵 double action reciprocating pump计量泵 metering pump深井泵 deep well pump齿轮泵 gear pump手摇泵 hand(wobble)pump螺杆泵 screw (spiral) pump潜水泵 submersible pump斜转子泵 inclined rotor pump封闭式电磁泵 hermetically sealed magnetic drive pump 气升泵 air—lift-pump轴承 bearing叶轮 impeller虹吸管 siphon高压容器 high pressure vessel焚化炉 incinerator火焰清除器 flame arrester工业炉 furnace烧嘴 burner锅炉 boiler回转窑 rotary kiln加热器 heater电加热器 electric heater 冷却器 cooler冷凝器 condenser换热器 heat exchanger 反应器 reactor蒸馏釜 still搅拌器 agitator混合器 mixer静态混合器 static mixers 管道混合器 line mixers 混合槽 mixing tanks破碎机 crusher磨碎机 grinder研磨机 pulverizer球磨机 ballmill过滤器 filter分离器 separator干燥器 drier翅片 fins烟囱 stack火炬 flare筛子 screen煅烧窑 calciner倾析器 decanter蒸发器 evaporator再沸器 reboiler萃取器 extractor离心机 centrifuger吸附(收)器 adsorber结晶器 crystallizer电解槽 electrolyzer电除尘器 electric precipitator洗涤器 scrubber消石灰器 slaker料仓 bin料斗 hopper加料器 feeder增稠器 thickener澄清器 clarifier分级器 classifier浮洗器 flocculator废液池 sump喷射器 ejector喷头 sprayer成套设备 package unit仪器设备 apparatus附属设备 accessory旋转式压缩机 rotary compressor往复式压缩机 reciprocating compressor水环式压缩机 nash compressor螺杆式压缩机 helical screw compressor离心式压缩机 centrifugal compressor多级压缩机 mutiple stages compressor固定床反应器 fixed bed reactor流化床反应器 fluidized bed reactor管式反应器 tubular reactor列管式换热器 tubular heat exchanger螺旋板式换热器 spiral plate heat exchanger 萃取塔 extraction column板式塔 plate column填料塔 packed column洗涤塔 scrubber吸收塔 absorber冷却塔 cooling tower精馏塔 fractionating tower汽提塔 stripper再生塔 regenerator造粒塔 prill tower塔附件 tower accessories液体分配(布)器 liquid distributor 填料支持板 support plate定距管 spacer降液管 downcomer升气管 chimney顶(底)层塔盘 top (bottom) tray挡板 baffle抽出口 draw nozzle溢流堰 weir泡罩 bubble cap筛板 sieve plate浮阀 float valve除沫器 demister pad塔裙座 skirt椭圆封头 elliptical head高位槽 head tank中间槽 intermediate tank加料槽 feed tank补给槽 make-up tank计量槽 measuring tank电解槽 cell溜槽 chute收集槽 collecting tank液滴分离器 knockout drum稀释罐 thinning tank缓冲罐 surge drum回流罐 reflux drum闪蒸罐 flash drum浮顶罐 floating roof tank内浮顶罐 covered floating roof tank球罐 spheroid气柜 gas holder湿式气柜 wet gas-holder干式气柜 dry gas—holder螺旋式气柜 helical gas—holder星型放料器,旋转阀 rotary valve抽滤器 mutche filter压滤器 filter press压滤机 pressure filter板框压滤器 plate—and—fram filter press 转鼓过滤器 rotary drum filter带式过滤器 belt filter翻盘式过滤器袋滤器 bag filter旋风分离器 cyclone separator盘式干燥箱 compartment tray drier真空干燥器 vacuum drier隧道式干燥器 tunnel drier回转干燥器 rotary drier穿流循环干燥器 through circulation drier喷雾干燥器 spray drier气流干燥器 pneumatic conveyor drier 圆盘式加料器 dish feeder螺旋式加料器 screw feeder颚式破碎机 jaw crusher回转破碎机 gyratory crusher滚洞破碎机 roll crusher锤式破碎机 hammer crusher冲击破碎机 rotor impact breaker气流喷射粉碎机 jet pulverizer棍磨机 rod mill雷蒙机 raymond mill锤磨机 hammer mill辊磨机 roller mill振动筛 vibrating screen回转筛 rotary screen风机 fan罗茨鼓风机 root's blower起重机 crane桥式起重机 bridge crane电动葫芦 motor hoist发电机 generator电动机 motor汽轮机 steam turbine五、管道工程 piping engineering1 阀门 valve阀杆 stem内螺纹阀杆 inside screw阀座 valve seat (body seat)阀座环、密封圈 sealing ring阀芯(包括密封圈,杆等) trim阀盘 disc阀体 body阀盖 bonnet手轮 hand wheel手柄 hand level (handle)压盖 gland闸阀 gate valve平行双闸板 double disc parallel seat楔形单闸板 split wedge截止阀 globe valve节流阀 throttle valve针阀 needle valve角阀(角式截止阀) angle valveY型阀(截止阀) Y—valve(Y—body globe valve)球阀 ball valve三通球阀 3—way ball valve蝶阀 butterfly valve对夹式(薄片型) wafer type偏心阀板蝶阀 offset disc (eccentric) butterfly valve 斜阀盘蝶阀 canted disc butterfly valve连杆式蝶阀 link butterfly valve止回式蝶阀 combined non-return butterfly valve柱塞阀 piston type valve旋塞阀 plug valve三通旋塞阀 three—way plug valve四通旋塞阀 four-way plug valve旋塞 cock衬套旋塞 sleeve cock隔膜阀 diaphragm valve橡胶衬里隔膜阀 rubber lined diaphragm valve 直通式隔膜阀 straight way diaphragm valve夹紧式胶管阀 pinch valve止回阀 check valve升降式止回阀 lift check valve旋启式止回阀 swing check valve落球式止回阀 ball check valve弹簧球式止回阀 spring ball check valve底阀 foot valve切断式止回阀 stop check valve活塞式止回阀 piston check valve翻板止回阀 flap check valve蝶式止回阀 butterfly check valve安全泄气阀 safety[SV]安全泄放阀 relief valve[RV]安全泄压阀 safety relief valve杠杆重锤式 lever and weight type罐底排污阀 flush-bottom tank valve波纹管密封阀 bellow sealed valve电磁阀 solenoid (operated) valve电动阀 electrically(electric-motor)operated valve 气动阀 pneumatic operated valve低温用阀 cryogenic service valve蒸汽疏水阀 steam trap机械式疏水阀 mechanical trap浮桶式疏水阀 open (top)bucket trap浮球式疏水阀 float trap倒吊桶式疏水阀 inverted bucket trap自由浮球式疏水阀 loose float trap恒温式疏水阀 thermostatic trap压力平衡式恒温疏水阀 balanced pressure thermostatic trap 热动力式疏水阀 thermodynamic trap脉冲式蒸汽疏水阀 impulse steam trap放汽阀(自动放汽阀) (automatic)air vent valve换向阀 diverting (reversing)valve呼吸阀 breather valve减压阀 pressure reducing valve控制阀 control valve执行机构 actuator差压调节阀 differential pressure regulating valve切断阀 block (shut-off, stop) valve调节阀 regulating valve快开阀 quick opening valve快闭阀 quick closing valve隔断阀 isolating valve三通阀 three way valve夹套阀 jacketed valve非旋转式阀 non—rotary valve2管子,管件,法兰管子 pipe(按标准制造的配管用管)tube(不按标准规格制造的其它用管)钢管 steel pipe铸铁管 cast iron pipe衬里管 lined pipe复合管 clad pipe碳钢管 carbon steel[C.S。
汽车导航AVN主机专业术语中英文对照
英文中文rusting锈蚀corrosion腐蚀mildew发霉;霉斑mounted or protected as in the vehicle按实际装车要求talcum powder滑石粉talcum滑石kernel内核finish product成品水口,汤口,浇口Interface接口Bind绑定Data type类;大类;小类别E-dog电子狗monitor监听Packaging封装spot check抽检band波段monophonic单声道的;单声部的;单频道的stereophonic立体声的,立体音响的HDD/ Hard Disk Drive硬盘驱动器acoustic声学的;音响的;听觉的Clearance清除;空隙HMI / Human Machine Interface人机界面volatile[化学] 挥发性的;不稳定的;爆炸性的;反复无常的GTS /Google Mobile Services Test Suite GMS套件测试Persian波斯的;波斯人的;波斯语的ISO /International Organization for国际标准化组织Standardizationgain range增益变化范围Transient voltage瞬态电压Transient Voltage Suppressors瞬态抑制二极管waveform波形throw load抛负载clamping voltage箝位电压;箝制电压withstand voltage耐压ground contact area接地面积current shunt电流分流DVD loader laser head DVD光头cutting nippers剪钳tweezers镊子solder wire焊锡线Tin soldering焊锡serge tube浪涌管TE Connectivity/Tyco Electronics泰科电子TI/ Texas Instruments Incorporated德州仪器semiconductor半导体analog模拟;线控optical光学的;眼睛的,视觉的directive指示;指令 指导的;管理的ECHA /European Chemicals Agency欧洲化学品管理局traceability[统计] 可追溯性;跟踪能力;可描绘periodically定期地;周期性地;偶尔;间歇explicitly明确地;明白地Car reversing倒车tier 2 supplier二级供应商combustibility燃烧性;[热] 可燃性NFC/Near Field Communication近场通信solution mode公模permissible可允许的;获得准许的etc/ et cetera(拉丁语), and so forth等等,及其他OIRT/ Organization for International Radio &Television国际广播电视组织CCIR/ International Radio ConsultativeCommittee国际无线电咨询委员会TCU/ Telematic Control Unit (ERA)行车电脑;车联网单元;ERA盒子APV/ Aftersales in French后装TTS/ text to speech语音合成Harmonic Distortion谐波失真Speaker Impedance喇叭阻抗OTA/ Over-the-Air Technology 空间下载技术; 空中下载技术。
说明书 英语

说明书英语说明书1. IntroductionThe purpose of this document is to provide a comprehensive guide on how to use a product or perform a specific task. In this instruction manual, we will outline the steps and procedures required in using or operating the product effectively. The instructions provided in this manual are written in English for easy comprehension by users.2. Getting StartedBefore using the product, it is essential to understand its functionalities and features. This section will provide a brief overview of the product and its components. Familiarize yourself with the product by reviewing the following information:2.1 Product OverviewProvide a general description of the product. Explain its purpose and highlight its key features. If applicable, mention any limitations or requirements the user should be aware of.2.2 Product ComponentsList and describe the different components included in the package. Make sure to provide clear instructions on how to identify and handle each component properly. 2.3 Basic SetupDetail the steps required to set up the product before use. This may include assembling parts, connecting cables, or configuring settings. Provide clear and concise instructions to ensure a successful setup process.3. Operating InstructionsIn this section, we will provide instructions on how to operate the product or perform specific tasks. The instructions will be structured in step-by-step format to make it easy for users to follow. Make sure to use simple and concise language, and include any necessary warnings or precautions.3.1 Powering On/OffExplain how to turn the product on and off properly. Provide any associated steps or requirements, such as charging the device or connecting it to a power source.3.2 Navigating the User InterfaceIf applicable, explain how to navigate through the product's user interface. This may include using buttons, menus, or touch gestures.3.3 Basic FunctionsDescribe the basic functions of the product and how to perform them. This may include capturing photos, playing media files, or accessing certain features.3.4 Advanced FeaturesIf the product has advanced features, provide instructions on how to utilize them. This may include customization options, advanced settings, or specialized functionalities.4. TroubleshootingIn this section, we will list common issues or problems that users may encounter and provide possible solutions. Include a step-by-step approach to troubleshooting and address frequently asked questions. If necessary, provide contact information for technical support or customer service.5. Maintenance and CareTo ensure the longevity of the product, it is important to provide guidelines on its maintenance and care. This section may include instructions on cleaning, storage, or recommended accessories. Encourage users to follow these guidelines to maximize the product's lifespan.6. Safety PrecautionsIt is crucial to emphasize the importance of safety when using the product. Provide a list of safety precautions that users should follow to prevent accidents or damage. Highlight any specific warnings or risks associated with the product's use.7. Warranty InformationIf applicable, provide details about the product's warranty. Explain what is covered under the warranty and any conditions or limitations that may apply. Include contact information for warranty support if available.8. ConclusionIn conclusion, this instruction manual has provided a comprehensive guide on using the product effectively. By following the instructions outlined in this document, users should be able to operate the product with ease and maximize its functionalities. If users have any additional questions or concerns, encourage them to refer back to this manual or contact customer support for further assistance.。
产品使用手册英文
产品使用手册英文User ManualThank you for choosing our product. This user manual will guide you through the installation and use of our product.Table of Contents1. Introduction2. Package Contents3. Product Overview4. Installation4.1 Hardware Installation4.2 Software Installation5. Usage Guide5.1 Powering On5.2 Setting Up5.3 Basic Operations5.4 Advanced Features6. Troubleshooting7. Technical Specifications8. Warranty and Support9. Regulatory Information10. Contact Information1. IntroductionThis section provides an overview of the product and its key features.2. Package ContentsThis section lists all the items included in the product package.3. Product OverviewThis section describes the different components and functions of the product.4. InstallationThis section provides step-by-step instructions on how to install the product.4.1 Hardware InstallationThis subsection explains how to physically connect and set up the hardware components of the product.4.2 Software InstallationThis subsection explains how to install and configure the software required for the product.5. Usage GuideThis section provides instructions on how to use the product effectively.5.1 Powering OnThis subsection explains how to power on the product.5.2 Setting UpThis subsection provides instructions on how to set up the product settings and preferences.5.3 Basic OperationsThis subsection explains the basic operations of the product, including navigation, input, and output. 5.4 Advanced FeaturesThis subsection covers the advanced features and functions of the product.6. TroubleshootingThis section provides solutions to common issues and problems that may arise while using the product.7. Technical SpecificationsThis section lists the technical specifications and requirements of the product.8. Warranty and SupportThis section explains the warranty coverage and support options for the product.9. Regulatory InformationThis section provides information on regulatory compliance for the product.10. Contact InformationThis section provides the contact details for customer support and inquiries.Please read this manual thoroughly before using the product. Follow all safety guidelines and instructions provided.。
Level measurement 说明书
Answers for industry./level | 877-768-1600Monitoring water levels in open channels. Tracking the amount of grain in a silo. Measuring oil in a tank. Simply put, level measurement tells you how much material is at a given location. With the knowledge that no single technology can address the needs of all industrial appli-cations, Siemens provides a complete range of level measurement devices.Ultrasonics. Radar. Guided wave radar. Capacitance. Point level. Gravimetric. Hydrostatic. Reliable. Easy to use. With convenient remote monitoring displays and industrial communi-cation options. All backed by Siemens global support network, providing experienced sales and technical assistance when and where you need it. Complementing our level technology are Siemens analytics, automation, and drives for industries around the globe.Millions of applications worldwide, with one common theme: together, these diverse level measurement technologies make us Siemens.Intelligence. Reliability. Accuracy. Siemens level measurement.2 | 877-768-1600Level measurement selector 4Ultrasonics 6Transducer selection 8Radar for solids 10Radar for liquids and slurries 12Guided wave radar 14Hydrostatic 15Continuous capacitance 16Gravimetric 18Point level 20Remote monitoring & digital displays 24Training, sales & support 26Communications 273 | 877-768-16004 | 877-768-16005SITRANS LUT400 SITRANS LUT400• I ndustry-leading accuracy – SITRANS LUT400’s ±1 mm (0.04") accuracy gives you confidence in your measurements• E asy to use – local user interface with four-button programming, menu-driven parameters, and Wizard support for key applications •Q uick to configure – graphical Quick Start Wizards guide you during setup•N ext generation Sonic Intelligence – improved performance in noisy environments thanks to digital receiver technology•C onsistently high performance – patented digital receiver technology ensures reliability even in the harshest environments•C ompatibility with Siemens Echomax transducers – operating range of 0.3 to 60 meters (1 to 200 ft), depending on transducerWelcome to the evolution of ultrasonics. Prepare yourself. With world-leading accuracy, unparalleled ease of use, setup in under a minute, and the customer-driven features you asked for, the SITRANS LUT400 series ultrasonic controllers have arrived. Making your work simpler and providing the reliability you need. These compact, single point controllers excel at continuous level monitoring and control in liquids, solids, or slurry applications in a wide range of industries. Three models make up the series: SITRANS LUT420 Level and Volume Controller, SITRANS LUT430 Level, Pump, Volume, and Flow Controller, and SITRANS LUT440 High Accuracy Open Channel Monitor (OCM), which also provides a full suite of advanced level, volume, and pump controls. | 877-768-1600Meet the ultrasonics familyDecades of experienceSiemens’ range of ultrasonic controllersand transmitters are a non-contactingtechnology requiring little to no maintenancecompared to other devices. They are a cost-effective solution for short- to long-rangeapplications of liquids, slurries, and solids.Siemens ultrasonics feature our patentedSonic Intelligence echo processing, deliveringaccurate measurement you can depend on.Ideal applications include water/wastewatermonitoring and pumping, inventorymanagement, and truck load-outs.6 | 877-768-1600 | 877-768-1600Echomax transducersWith every transducer from Siemens, you get:• S onic Intelligence (when paired with a Siemens controller) – our field-proven echo processing algorithms guarantee the most reliable performance possible.• U nmatched beam angle – stronger pulse and sensitivity in a compact beam make our ultrasonics transducers the most powerful in the industry.• E ase of installation – Siemens’ wide range of mounting brackets and accessories provide the right installation package for any application.• S ales and support in your neighborhood –our extensive global coverage meansconveniently located sales and support.Siemens Echomax ultrasonic level transducers provide trouble-free, reliable performance. Our non-contacting transducers are impervious to dust, moisture, vibrations, flooding, and high temperatures. With the ability to detect submergence – when paired with a submergence shield – and an active face to reduce material buildup, these transducers are a perfect fit for a range of industrial applications. Siemens transducers are easy to install and require little to no maintenance.8 | 877-768-16009 | 877-768-1600SITRANS LR560• 78 GHz radar transmitter allows for measurement through intense dust • A n exceptionally narrow 4° beam angle can cope with complicated silo geometry • S ealed lens cavity is highly resistant to dust buildup• E asy to install and configure with Quick Start Wizard• S mall size fits most silo nozzles• T wo measurement ranges: 40 m (131 ft)and 100 m (328 ft)6 10Radar for solidsSITRANS LR560 is the easiest to use solids radar transmitter on the market. With a high frequency of 78 GHz, 4 degree narrow beam, and short wavelength, it performs reliably on solids material from practically any installation location.For extremely low dielectric, low density powders, the 25 GHz SITRANS LR460 is the preferred solution. Featuring a horn antenna with an 8 degree beam, the 4-wire FMCW SITRANS LR460 has proven itself in thousands of applications. Siemens solids radar transmitters easily tackle dusty environments and are not affected by temperature changes . | 877-768-1600Radar for liquids and slurriesSITRANS LR250 is your first choice for liquid level measurement in storage and process vessels to 20 meters (66 ft). SITRANS LR400 offers high performance even on low dielectric media. For process vessels which may include turbulence, buildup, or foam, SITRANS LR200 is the best choice. Its low frequency better suits this environment and functions reliably in applications up to 20 meters (66 ft).For low-cost level measurement, SITRANS Probe LR offers a small process connection and operates at a low frequency. It can be used on liquids and slurries up to 20 meters (66 ft). Simple configuration and programming make this transmitter a cost-effective solution.SITRANS LR250•E asy to install – small horn and narrow beamallows installation practically anywhere onyour vessel•Q uick to configure – Quick Start Wizardguides you during setup•A pplication flexibility – new PVDF threadedantenna makes it ideal for harsh processconditions, as well as SIL 2 rating forapplications demanding functional safety•P rocess Intelligence – advanced echoprocessing for unparalleled performance•R eliable and accurate – extremely high signaland low noise yields high performance, evenwith low dielectric mediaGuided wave radarSITRANS LG200 is Siemens 2-wire guided wave radar transmitter for short- to medium-range level, level/interface, and volume measurement of liquids, slurries, and bulk solids. Its many antenna configurations make it possible to measure numerous complex applications, even ammonia, chlorine, high temperature/pressure, or cryogenics.SITRANS LG2007ML1300/7ML130X2-wire, guided wave radar transmitter for short- to medium-range level, level/interface,and volume measurement of liquids and solids.22.5 m (75 ft)HydrostaticHydrostatic level measurement with Siemens gauge, absolute, and differential pressure transmitters is a low cost option for direct mounting or mounting with remote seals on tanks and vessels. These instruments can handle extreme chemical and mechanical loads as well as electromagnetic interference. They are widely applied in chemical and petrochemical industries.Tried and tested for a wide range ofapplications, Siemens inverse frequency shift capacitance continuous level transmitters are suitable for liquids, solids, and interface applications. Siemens capacitanceinstruments use active-shield technology to ensure true and accurate level readings are recorded from the material surface.SITRANS LC300 and SITRANS LC500 are ideal for standard and industrial applications in the chemical, hydrocarbon processing, and food and beverage industries.CapacitanceGravimetricGravimetric level measurement with SIWAREX weighing technology gives you excellent results without evercontacting the material. Load cells combined with SIWAREX electronics determine your product's weight independent of process conditions such as temperature, container shape, material density, shift in the center of gravity, or agitators. Bridging, heaped objects, hopper flow, foam, steam, and dust have no effect on gravimetric measurement.Precision from a single source – weighingtechnology from SiemensWith SIWAREX electronics and load cells, not only are you choosing the highest quality in construction, long-lasting performance, and easy integration into your systems, you are also opening the doors to Siemens' comprehensive spectrum of instrumentation.Meet the point level familySiemens level switches detect high, low, and demand levels in solids, including low bulk density applications such as dry powder and fine grain, and in liquid applications, including sticky materials. These switches work independent of material conditions such as vapors, gases, bubbles, or foam.21Our level switches offer superior performance while reducing maintenance, downtime, and equipment replacement cost. Their robust design lasts in harsh and abrasive environments, guaranteeing a long service life and low cost of ownership. They are easy to set up and to connect to any alarm or control system.Our rotating or vibrating point level switches specialize in low bulk density applications. Standard aluminum enclosures and stainless steel process connections provide exceptional resistance to mechanical forces.Our unique inverse frequency shift approach to capacitance technology ensures accurate, reliable, and repeatable measurement, even in dusty, turbulent, and vaporous environments or in situations with product buildup. Because even a small level change creates a large and detectable change in frequency, Siemens Pointek CLS series provide excellent resolution while consistently outperforming conventional devices. | 877-768-160022Point level | 877-768-160023 | 877-768-160024 Remote displays and monitoringSiemens remote digital displays complement our range of level, flow, pressure, temperature, weighing, and other process devices. SITRANS RD100 is NEMA 4X/IP67 enclosed for indoor and outdoor applications, in hot or cold environments, and in safe or hazardous areas. SITRANS RD200 is a universal input, panel mount, remote digitaldisplay for remotely collecting, logging, and presenting data from as many as 100 displays to your local computer. SITRANS RD500 is a remote data manager providing remote monitoring through data logging, web access, andalarming for instrumentation.With SITRANS RD500, monitor inventory levels, process, environmental, and remoteW W W | 877-768-160025 | 877-768-1600Maximize your skills with factory-certified training Industry Sector SC PI2 provides a full schedule of Process Instrumentation training opportunities forSiemens employees, channel partners, and customers. The PI Training courses are designed for new salesand service employees to learn the product lines,the technologies, and the applications. The courses are also prerequisites for the advanced technology courses which provide in-depth application training. Designed for hands-on learning, all courses are ledby field-tested instructors who combine extensive application and instrumentation knowledge with seasoned training experience. Our PI Training Center is specifically designed to optimize your classroom time. It is fully equipped with application simulation stations, a full range of PI instruments, and complete industrial communication networks.For current information and schedules, visit our website at:/instrumentation/training/canada Custom engineeringSiemens provides custom-engineered products to solveyour special application needs. From material compatibility challenges to unique size requirements, Siemens custom engineering team can help.Service around the worldPlants must function reliably at all times. Efficient and effective process instrumentation and analytics are an indispensable requirement to this end. You also need to be certain of fast and competent service from your supplier. Siemens is a global company that reacts locally. Whether you require consulting, quick delivery, or installation of new devices, the Siemens network of specialists is available to you around the world, wherever your location.Service around the clockOur online support system offers rapid, comprehensive assistance regardless of time or location. From product support to service information, Siemens Industry online support is your first choice – around the clock, 365 days a year./automation/service&supportPI Training Sales andsupportJoin us online!Get information fastSiemens offers numerous instructional and promotionalvideos featuring our level and weighing instruments.View these on YouTube at:/thinksiemensFollow us on twitter (SiemensSensors) and Facebook.26 | 877-768-1600 | 877-768-160027/sensorsystems Subject to change without prior notice Order No.: 7ML1996-5MB03Printed in Canada© Siemens AG 2012Siemens AGIndustry SectorSensors and Communication 76181 KARLSRUHE GERMANYThe information provided in this brochure contains merelygeneral descriptions or characteristics of performancewhich in case of actual use do not always apply as describedor which may change as a result of further developmentof the products. An obligation to provide the respectivecharacteristics shall only exist if expressly agreed in theterms of contract.All product designations may be trademarks or productnames of Siemens AG or supplier companies whose use bythird parties for their own purposes could violate the rightsof the owners. | 877-768-1600。
APQP经典文件
APQP经典文件任务号: 1Task Name: Attend Key Stakeholders Meeting任务名称: 参加要紧责任者会议Task Description: The purpose of the Key Stakeholders Meeting is to inv olve all GM stakeholders in the Advanced Purchasing Process on a particular co mmodity package to develop and understand the process, content, timing, and str ategy. It is intended that these meetings be conducted on all commodities define d as critical and major by the platform. Key stakeholders meet to review key pr ogram information and timing as referenced in the Advanced Purchasing “typic al agenda”. (See Appendix 1)任务描述: 要紧责任者会议的目的:让所有的通用公司的要紧责任者都参与到先期采购规划当中,就一特定的商品来制定并研究规划、内容、进度及策略。
打算召开按照标准认为是关键要紧产品的要紧责任者会议。
要紧责任者参考前期采购“要紧议程”来批阅要紧的规划信息及进度。
(见附录1)Deliverables: Preliminary functional requirements使用的材料: 初始的职能要求Preliminary sourcing and program timing初始的采购选点及规划进度Preliminary bid list初始的报价单Completed Stakeholders meeting checklist完成的要紧责任者会议的检查清单Supplier Workshop details (Timing, Team members, question naire, etc.)供应商车间细节(进度、班组成员、疑咨询等)Target date for Technical reviews技术评审的目标日期Verification that WWP “Required Quality Information” let ter is accurate检验WWP“质量信息要求”信是准确的Customer for Deliverables: Purchasing, Engineering, Supplier Quality, Mar keting, PC&L材料发放的部门: 采购,工程,供应商质量,销售,生产操纵及物资供应Necessary Inputs: Source of inputs:必要的输入: 输入来源:Technical documents (BOM, Functional requirements, etc.) Engineeri ng技术材料 (材料清单,职能要求, 等) 工程Creativity Team Bidders List Buyer制造性小组投标人名单采购员Lessons Learned on previous programs Buyer/SQ E/Engineer先前打算改进采购员/S QE/工程师Supplier Quality Statement of Requirements SQE 供应商质量要求陈述SQETask Number: 1 continured任务号: 1 续Task Name: Attend Key Stakeholders Meeting任务名称: 参加要紧责任者会议Resources: Purchasing, Supplier Quality, Engineering来源: 采购,供应商质量,工程Methodology:方法:Buyer indicates estimate of timing for Key Stakeholder Meeting in the Adva nced Purchasing Planning calendar.采购员指出先期采购打算时刻表上要紧责任者会议的进度Buyer sends invitation to SQE prior to meeting.采购员在会议开始前将邀请送到SQESQE participates in meeting.SQE 参加会议Key stakeholders review program information and timing.要紧的责任者批阅规划信息及进度SQE Responsibility:SQE 责任:Clarify the role of the SQE in the sourcing process.阐明SQE在选点过程中的作用.Obtain knowledge of what is being sourced (functional aspects of part)猎取正在选点的部件的知识 (零件的关键部分)Obtain knowledge of timing (sourcing and program)猎取进度知识 (选点及规划)Review Creativity Team Bidders List - Identify suppliers to remove based on SQE knowledge of their capability.批阅制造性小组投标人名单-按照SQE对供应商生产能力的了解来确定删除的供应商名单Confirm “Make or Purchase” (MOP) coding has been done for modules/i ntegrated packages (Should accompany SOR)确认已完成的模具/集成包装有“制造或购买”(MOP)的符号(应附有S OR)。
微软全球技术支持中心-香港 澳门说明书

Incident Support Services Overview and Ordering GuideIncident Support Services OverviewMicrosoft®Global Technical Support Center – HK/Macau top priority is to help every business, organization, and individual to be more successful with Microsoft products. Fast, accurate issue resolution and comprehensive support services mean you can focus on core business and personal goals rather than on technology. The result: Increased productivity and a higher return on your investments.This guide is designed to help you determine the incident support offering best suited to your business needs and provide you with the information, forms, or phone numbers necessary to obtain the support you need.There are two types of incident support services available, a brief summary of which is listed below with more detailed information online at /default.aspx?ln=en-hk. Support offering follows the product support lifecycle, please refer to /lifecycle/Professional Incident Support - Targeted at technical communities of individuals, including resellers and consultants, OEMs/SBs, Developers, IT Pros, and Microsoft Certified Partners. Support hours Monday – Friday 9:00am -6:00pm, except public holidaysPersonal Incident Support – Targeted for home users and SOHO (small office, home office) users using Microsoft desktop or consumer products in stand-alone or small network environments. Support hours Monday – Friday 9:00am -9:00pm, except public holidaysSeverity A English Product 24X7 business critical support in English - The delivery of Professional incidents on a 24x7 basis will consist of local support during business hours (Monday – Friday, 9:00am – 6:00pm, except public holidays) for all severities, and delivery of out of business hours support for Severity A incidents in English for English product only at a special rate.“Severity A” incidents means the following situations that you may be in: Critical business impact; Customer’sbusiness has significant loss or degradation of services; Need response within 2 hourOrdering Instructions:Credit card purchases can be made by calling our services hotline (852) 2388-9600; by faxing or mailing the Incident Support Services Order Form to the fax number or address below.Microsoft Hong Kong13/F, Cyberport 2100 Cyberport RoadHong KongAttention: Global Technical Support Center – HK/MacauFax: (852) 2967-1679©2011 Microsoft Corporation. All rights reserved. Other product and company names mentioned herein may be the trademarks of their respective owners.Incident Support Services Order FormBoth Personal and Professional Incident Support package allow you to submit an incident over the phone or online. All annual Incident Support Services accounts are valid for one year from the date of purchase.Credit Card Number: Expiration Date ___ / ____Microsoft Global Technical Support Center - HK will send you an official invoice that contains your account information when accepted your purchase.TERMS AND CONDITIONS OF PERSONAL/PROFESSIONAL INCIDENT SUPPORTIMPORTANT - READ CAREFULLY: This Agreement is a legal agreement between you (either an individual or a single entity) and Microsoft Hong Kong Limited (for customers in Hong Kong SAR) or Microsoft Macau Limited (for customers in Macau SAR), as the case may be (“Microsoft”) for the number of support services (“Services”) incidents indicated on the Personal/Professional incident support order form for software products licensed by Microsoft Corporation (“Software”). This P ersonal and Professional incident support service may also include updates and supplements to Software released by Microsoft Corporation. Any software provided along with the Personal and Professional incident support is licensed to you under the terms of a separate end-user license agreement by Microsoft Corporation. By using the Personal/Professional incident support, you agree to be bound by the terms of this Agreement. If you do not agree to the terms of this Agreement, do not use the Services; you may, however, contact Microsoft support hotline for a full refund within 14 days from the date of purchase with the full receipt. If you do not seek a refund within 14 days after your purchase of this service, you will be deemed to have accepted the terms of this Agreement.NOTE : THE SERVICES UNDER THE PERSONAL AND PROFESSIONAL INCIDENT SUPPORT ARE ONLY VALID FOR USE IN HONG KONG SAR AND MACAU SAR AND MUST BE USED ON OR BEFORE THE EXPIRY DATE. IF YOU DO NOT USE THE SERVICES BEFORE THE EXPIRY DATE, IT WILL EXPIRE AND YOU WILL NOT BE ENTITLED TO USE THE SERVICES AFTER SUCH DATE. IN SUCH AN EVENT, YOU EXPRESSLY AGREE THAT MICROSOFT WILL NOT BE LIABLE FOR ANY REFUND OR ANY OTHER DAMAGES WHATSOEVER.1.Definitions :“Incident” means a single use or functionality prob lem and the commercial reasonable effort needed to resolve it regardless of the number of contacts with you concerning the problem. A “Single” use or functionality problem is a problem that cannot be broken down int o subordinate problems. If a problem consists of subordinate problems, each shall be considered a separate incident. Microsoft shall reasonably determine what a single incident is and when it has ended. “Online Support”, “Professional Support” and “Personal Support” shall have t he meaning as desc ribed in the relevant Services Description. “Services Description” means detail description of Services provided for Professi onal Support or Personal Support issued by Microsoft from time to time.2.Microsoft will provide the Services specified in this Agreement and the relevant Service Description (which may be amended by Microsoft fromtime to time). An appropriate number of Incidents will be deducted from the total number of Incidents covered by the Personal/Professional incident support for the services provided. The Services involve telephone and limited web support. You (on behalf of yourself and all employees and representatives (if any)) agree to use the Services on the terms and conditions set out in this Agreement.3.This Agreement applies only to those Services Microsoft has expressly agreed to provide. Provision of any product or services not so specifiedwill be the subject of separate agreement. References to this Agreement include a reference to the relevant Service Description and any annexes or appendices all of which constitute the entire agreement in relation to the Services.4.The Services are for the sole benefit of you as the named user (if you acquired this Personal/Professional incident support in your personalcapacity) or the named contact (if you acquired this Personal/Professional incident support as a corporate customer) provided that for Professional incident support of 5 incidents, corporate customers may register up to two (2) named contacts for receiving the Services.Microsoft reserves the right to immediately terminate any Services and this Agreement on reasonable suspicion that you have allowed someone else to use the Services in your name.5.You will take adequate precaution to ensure that no one will abuse the Services by wrongfully using your contract number to receive theServices. You are responsible for all use (including misuse) of any number provided to you as a prerequisite for the provision of the Services until such time as you advise Microsoft in writing that the relevant contract number or password has been lost or stolen, at which time a replacement number will be issued by Microsoft.6.Only Software which is validly licensed by Microsoft Corporation, purchased within Hong Kong SAR and Macau SAR from a MicrosoftAuthorised reseller or Retailer, properly registered and unaltered is eligible for the Services. Only those Software described in the relevant Services Description from time to time will be supported. Where language versions other than English and Traditional Chinese are validly licensed, Microsoft will use commercially reasonable efforts to provide support for such language versions.7.Services will be provided to assist you in resolving problems you encounter with the use or functionality of the Software and may include advice,recommendations and information concerning your use of the Software with various hardware and software configurations. Microsoft warrants that it will use all commercially reasonable care and skill in trying to resolve problems but is unable to, and does not warrant that every problem will be resolved. To the extent permitted by law, this limited warranty is in lieu of all other warranties and conditions, express, or implied, including all implied warranties of merchantability and fitness for a particular purpose and of all other obligations, conditions, or liabilities on the part of Microsoft.8.Services will not be provided where the Software is be used with less than the minimum system configuration recommended by Microsoft. Onlycurrent versions of the Software at the time the request for Services is made, and the next to current version of the Software, will be supported.“Current” means that the relevant version of the Software is available for purchase by the public at the time of the d ate of the request for service. Microsoft may, at its sole discretion agree to provide services to support non-current software, in which case the appropriate number of Incidents to deal with such request for services will be deducted. The following are excluded from the Services: (a) failure, difficulty or inability in operation (“failure”) caused by equipment, product or services not supplied by Microsoft; (b) failure resulting from modifica tion of a Software; (c) misuse of a Software or operator error; and (d) unlicensed software.9.You must provide Microsoft with up to date, accurate and complete configuration and topology information concerning your computer system(s)and network(s) if asked to do so. Microsoft reserves the right to refuse to provide Services to you at any time if in its sole discretion Microsoft determines that your computer and network configuration(s) and topology(ies) are not supportable by Microsoft, you fail to provide the requested information or you have provided insufficient information for Microsoft to progress the issue. If Microsoft makes such a determination it may terminate this Agreement forthwith and you will be refunded an amount representing any unused Incidents on a pro-rata basis, except where you fail to provide or provide insufficient information on request from Microsoft and Microsoft has already spent more than 30 minutes working on the relevant problem.10.If Microsoft determines that the problem experienced by you is caused by hardware or software not provided by Microsoft the support will beregarded as a single Incident request, but support provided for that Incident will end upon such determination.11.Microsoft may amend the terms of this Agreement and/or the relevant Service Description on giving 30 days* written notice. If Microsoftprovides such notice and you do not accept the changes, then you may terminate this Agreement by notice in writing to Microsoft pursuant to Clause 13 below.12.Each fully paid Personal/Professional incident support shall be valid for a period of twelve (12) months from the date you register and use theServices unless terminated earlier in accordance with the conditions of this Agreement. ANY INCIDENTS OF PERSONAL/PROFESSIONAL INCIDENT SUPPORT WHICH HAVE NOT BEEN USED WITHIN THE SAID TWELVE (12) MONTHS WILL AUTOMATICALLY EXPIRE AT THE END OF THE SAID PERIOD. THE SERVICES UNDER PERSONAL/PROFESSIONAL INCIDENT SUPPORT ARE ONLY VALID FOR USE IN HONG KONG SAR AND MACAU SAR AND MUST BE USED ON OR BEFORE THE EXPIRY DATE. IF YOU DO NOT USE THE SERVICES BEFORE THE EXPIRY DATE, THE PERSONAL/PROFESSIONAL INCIDENT SUPPORT WILL EXPIRE AND YOU WILL NOT BE ENTITLED TO USE THE SERVICES AFTER SUCH DATE. IN SUCH AN EVENT, YOU EXPRESSLY AGREE THAT MICROSOFT WILL NOT BE LIABLE FOR ANY REFUND OR ANY OTHER DAMAGES WHATSOEVER.13.Either party may terminate this Agreement immediately by notice in writing if the other party has breached any term of this Agreement and hasfailed to remedy that breach within 14 days of being requested to do so or, alternatively, if the other party is no longer able to meet its debts as and when they fall due. Microsoft may terminate this Agreement by giving you 30 days* written notice. You may terminate this Agreement by giving Microsoft 90 days* written notice. Where this Agreement is terminated without fault on your side, you will be refunded an amount representing the number of unused Incidents on a pro-rata basis. At its discretion Microsoft may suspend provision of the Services if at any time your conduct is such that, in its reasonab le view, Microsoft’s ability to provide the Services is detrimentally affected by that conduct.14.You acknowledge that you have relied on your own skill and judgment in deciding to acquire the Services. You assume ALL RISKS for the useyou may make of the information, software and other materials and media made available to you under the Personal/Professional Incident Support or through access to the Services.15.You are not entitled to rely on, and Microsoft makes no warranties in respect of, the Services being uninterrupted or error-free. Microsoft doesnot warrant, and you must not rely on Microsoft providing, error-free or continuous availability communications links as the provision of Services via telephone or data links is dependent on the continued availability of communications facilities provided by third parties. You agree to take adequate precautions against damage to your operation that could be caused by such interruption or errors, including making appropriate data backups, and that Microsoft will not be held responsible for any loss of your data. You must ensure that means to access the Services are available and you must also ensure proper and lawful use of the same.16.If the relevant Services Description specifies response times then all reasonable efforts will be made by Microsoft to resolve service requests inaccordance with those response times, provided always that such requests can ultimately be resolved by Microsoft. If no specific response times are indicated, the Services will be provided within a reasonable time.17.Microsoft’s sole obligation and your exclusive remedy in the event of breach of any terms of this Agreement or any the warran ties by Microsoftshall be to use commercially reasonable efforts to correct the breach if the same results in the material impairment of the operation of the Services as warranted. If Microsoft cannot correct the breach within fourteen (14) days, Microsoft or you may terminate this Agreement immediately whereupon Microsoft shall have no obligation or liability to you except to refund an amount representing the unused Incidents, if any, on a pro-rata basis.18.Subject to, and to the extent permitted by applicable law, neither Microsoft, its Contractor (as defined below) nor anyone else who has beeninvolved in the creation, production, or delivery of the Services shall be liable for any direct, indirect, consequential or incidental damages (including damages for loss of business profits, business interruption, loss of business information, and the like or any other pecuniary loss) arising out of the use or inability to use Microsoft products or provision of, or failure to provide, the Services even if Microsoft, its Contractor orsuch third party has been advised of the possibility of such damages. In any event, the liability of Microsoft, its Contractor or such third party, whether for negligence, breach of contract, breach of warranty, or otherwise shall, in the aggregate, not exceed the total amount you paid for the Personal/Professional incident support. No action, whether in contract, tort, or otherwise, arising out of the performance of the Services or these Terms and Conditions may be brought by either party more than two (2) years after the cause of action arises.19.If Microsoft’s performance of any obligat ion under this Agreement is prevented or delayed by causes beyond its reasonable control including,but not limited to, Acts of God, fire, explosion, vandalism, storm, strikes, labour disputes, wars, national emergencies, lockout, work stoppages or other labour difficulties, supplier failures, breaches or delays, failures and down times of utilities and/or telecommunications equipment or computer down times then Microsoft shall be excused from such performance for the duration of the period during which such cause continues to bring about such prevention or delay.20.You may not assign this Agreement, or the right to receive the Services to any person or company without Microsoft’s prior wr itten permission.21.Notwithstanding any other provision of this Agreement, Microsoft may engage, hire, license or sub-contract such persons as it considersnecessary to provide the Services (“Contractor”). Where a Contractor is engaged by Microsoft to perform the Services or any p art thereof then the references to Microsoft in this Agreement shall be deemed to include Microsoft’s Contractors.22.Microsoft treats the personal information provided by you during registration as confidential. The information may be disclosed or transferred ona confidential basis to our parent company, Microsoft Corporation, in the United States and/or other associated companies, partners andagents. Your personal data will only be used for the purpose for which it was originally collected and for general marketing purposes of products or services of Microsoft, Microsoft Corporation and affiliated companies and/or our selected partners. For details, please visit our web site at /hk/privacy.23.You may cancel any annual support incident within 90 days from time of purchase and receive a pro-rata refund provided that all requests forrefund are made in writing within the said 90 days period. All such requests should be directed to Customer Service hotline at (852) 2388-9600.24.This Agreement shall be construed in accordance with the laws of in Hong Kong SAR of the People’s Republic of China.。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Ames Research CenterMoffett Field, California 94035Technical Support Package Three-Degree-of-FreedomParallel Mechanical LinkageNASA Tech BriefsARC-14066National Aeronautics andSpace AdministrationTechnical Support PackageforTHREE-DEGREE-OF-FREEDOM PARALLEL MECHANICAL LINKAGEARC-14066NASA Tech BriefsThe information in this Technical Support Package comprises the documentation referenced in ARC-14066 of NASA Tech Briefs. It is provided under the Commercial Technology Program of the National Aeronautics and Space Administration to make available the results of aerospace-related developments considered having wider technological, scientific, or commercial applications. Further assistance is available from sources listed in NASA Tech Briefs on the page entitled “NASA Commercial Technology Team.”Additional information regarding research and technology in this general area may be found in a variety of publications available from the NASA Scientific and Technical Information (STI) Program Office. You can access the STI Program Office via or as follows:NASA STI Help DeskNASA Center for AeroSpace Information7121 Standard DriveHanover, MD 21076-1320Telephone: (301) 621-0390, Fax: (301) 621-0134, E-mail: help@NOTICE: This document was prepared under the sponsorship of the National Aeronautics and Space Administration. Neither the United States Government nor any person acting on behalf of the United States Government assumes any liability resulting from the use of the information contained in this document or warrants that such use will be free from privately owned rights. If trade names or manufacturers’ names are used in this report, it is for identification only. This usage does not constitute an official endorsement, either expressed or implied, by the National Aeronautics and Space Administration.Three-Degree-of-Freedom Parallel Mechanical LinkageNote: The following information is excerpted from United States Patent 5,816,105.------------------------------------------------------------------------Three degree of freedom parallel mechanical linkageAbstractA three degree of freedom parallel mechanism or linkage that couples three degree of freedom translational displacements at an endpoint, such as a handle, a hand grip, or a robot tool, to link rotations about three axes that are fixed with respect to a common base or ground link. The mechanism includes a three degree of freedom spherical linkage formed of two closed loops, and a planar linkage connected to the endpoint. The closed loops are rotatably interconnected, and made of eight rigid links connected by a plurality of single degree of freedom revolute joints. Three of these revolute joints are base joints and are connected to a common ground, such that the axis lines passing through the revolute joints intersect at a common fixed center point K forming the center of a spherical work volume in which the endpoint is capable of moving. The three degrees of freedom correspond to the spatial displacement of the endpoint, for instance. The mechanism provides a new overall spatial kinematic linkage composed of a minimal number of rigid links and rotary joints. The mechanism has improved mechanical stiffness, and conveys mechanical power bidirectionally between the human operator and the electromechanical actuators. It does not require gears, belts, cable, screw or other types of transmission elements, and is useful in applications requiring full backdrivability. Thus, this invention can serve as the mechanical linkage for actively powered devices such as compliant robotic manipulators and force-reflecting hand controllers, and passive devices such as manual input devices for computers and other systems.------------------------------------------------------------------------Inventors: Adelstein; Bernard D. (San Mateo, CA)Assignee: The United States of America as represented by the Administrator of the National Aeronautics and Space Administration Washington, DCAppl. No.: 700584Filed: July 26, 1996Current U.S. Class:74/471XY; 74/490.03; 318/568.11; 345/161; 901/9; 901/23; 901/46Intern'l Class: B25J 009/00; B25J 019/02; G05G 013/00Field of Search: 74/490.01,490.03,471 XY 901/9,15,18,19,23,46 414/729 318/568.11,568.12 345/161------------------------------------------------------------------------References Cited [Referenced By]------------------------------------------------------------------------U.S. Patent Documents4630500Dec., 1986Suzuki74/473.4976582Dec., 1990Clavel414/729.5149023Sep., 1992Sakurai et al.244/229.5222400Jun., 1993Hilton73/862.5316435May., 1994Mozingo414/685.5333514Aug., 1994Toyoma et al.74/479.5360312Nov., 1994Mozingo414/685.5379663Jan., 1995Hara74/474.5388935Feb., 1995Sheldon409/201.5459382Oct., 1995Jacobus318/568.5480276Jan., 1996Mozingo414/685.5497847Mar., 1996Ota et al.180/333.5587937Dec., 1996Massie et al.Foreign Patent Documents1472252Apr., 1989SU414/729.Other ReferencesAdelstein, B.D., and Rosen, M.J., 1992, "Design and Implementation of a force reflecting manipulandum for manual control research," Advances in Robotics, DSC-vol. 42, ASME, New York, pp. 1-12.Ellis, R.E., Ismaeil, O.M., Lipsett, M.G., 1993, "Design and evaluation of a high performance prototype planar haptic interface," Advances in Robotics, Mechatronics, and Haptic Interfaces, DSC-vol. 49, ASME, New York, pp. 55-64.Massie, T.H., and Salisbury, J.K., 1994, "The Phantom haptic interface: a device for probing virtual objects," Dynamic Systems and Control 1994, DSC-vol. 55-1, ASME, New York, pp. 295-301.Buttolo, P., and Hannaford, B., 1995, "Advantages of actuation redundancy for the design of haptic displays," Proceedings, ASME Dynamic Systems and Control Division, DSC-vol. 57-2, ASME, New York, pp. 623-630.Millman, P.A., Stanley, M., and Colgate, J.E., 1993, "Design of a high performance haptic interface to virtual environments," Proceedings, IEEE Virtual Reality Annual International Symposium, Seattle, WA, pp. 216-222.Kazerooni, H., 1995, "The human power amplifier technology at the University of California Berkeley," Proceedings, ASME Dynamic Systems and Controls Division, DSC vol. 57-2, ASME, New York, pp. 605-613.Iwata, H., 1990, "Artificial Reality with force-feedback: development of desktop virtual space with compact master manipulator," Computer Graphics, 24, 165-170.Hui, R., Ouellet, A., Wang, A., Kry, P., Williams, S., Vukovich, G., and Perussini, W, 1995, "Mechanisms for haptic feedback," Proceedings, IEEE Int. Conf. Robotics and Automation, Nagoya, Japan, pp. 2138-2143.Lindemann, R., and Tesar, D., 1989, "Construction and demonstration of a 9-string six dof force reflecting joystick for telerobotics," Proceedings, NASA Conference on Space Telerobotics, vol. 4, JPL Publication 89-7, pp. 55-63.Marshall, W.C., DeMers, R.E., Schipper, B.W., and Levitan, L., 1993, "Synergistic computing applied to a virtual-pivot six-degree-of-freedom hand controller designed for aerospace telerobotics," Proceedings, AIAA Computing in Aerospace IX, San Diego, CA, AIAA 93-4506.Gosselin, C., and Angeles, J., 1989, "The optimum kinematic design of a spherical three-degree-of-freedom parallel manipulator," ASME J. Mech., Trans., and Automation in Design, 111, 202-207.Berkelman, P.J., Hollis, R.L., and Salcudean, 1995, "Interacting with virtual environments using a magnetic levitation haptic interface," Proceedings, IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, Pittsburgh, Pennsylvania, vol. 1, pp. 117-122.Primary Examiner: Bonck; Rodney H.Assistant Examiner: Grabow; TroyAttorney, Agent or Firm: Bon; Kathleen Dal, Lupuloff; Harry, Mannix; John G.------------------------------------------------------------------------Claims------------------------------------------------------------------------What is claimed is:1. A three degree of freedom mechanism for use as a force reflecting interface or in a three dimensional robotic manipulator, comprising:a three degree of freedom spherical linkage formed of a first and a second closed loop respectively anddefining an endpoint S1 and an endpoint S;said first and second closed loops being rotatably interconnected, and made of eight rigid links connected by nine single degree of freedom revolute joints;three of said revolute joints being base joints and rotatably connected to a common base; a planar linkage connected to said endpoints S1 and S of said spherical linkage, said planar linkage including a third closed loop formed of five rigid links and revolute joints, the axis line passing through said revolute joints remaining parallel and forming a polygon; andwherein axis lines passing through said nine single degree of freedom revolute joints intersect at a common fixed center point O forming the center of a spherical work volume in which said endpoints S1 and S are capable of moving.2. The mechanism according to claim 1, wherein said spherical linkage and said planar linkage are formed of ten rigid links and twelve revolute joints arranged in three closed chain loops of six binary links and four ternary links.3. The mechanism according to claim 2, wherein said planar linkage further includes an endpoint D connected to said one of said revolute joints of said planar linkage.4. The mechanism according to claim 3, wherein said center point O and said endpoint D define a virtual link VL whose length changes and permits said endpoint D to move to any point within a spherical work volume having point O as its center and VL as its radius.5. The mechanism according to claim 4, wherein the maximum length of said virtual link VL is defined by the following equation:VL(max)=R2+L1,where R2 is the distance between an endpoint S and said center point O, and L1 is the distance between said endpoints S and D.6. The mechanism according to claim 2, wherein said ternary links share a single revolute joint.7. The mechanism according to claim 1, wherein said first closed loop includes four rigid links and a base link.8. The mechanism according to claim 7, wherein said second closed loop includes four rigid links anda base link.9. The mechanism according to claim 3, wherein said three base joints may drive and be backdriven by said endpoint D.10. The mechanism according to claim 5, wherein said three base joints may drive and be backdriven by said endpoint S1 or said endpoint S.11. The mechanism according to claim 9, wherein said three base joints are rotary actuators.12. The mechanism according to claim 9, wherein said three base joints are sensors.------------------------------------------------------------------------Description------------------------------------------------------------------------ORIGIN OF INVENTIONThe invention described herein was made in the performance of work under a NASA contract and is subject to the provision of Section 305 of the National Aeronautics and Space Act of 1958, Public Law 85-568 (72 Stat. 435; 42 U.S.C. 2457).BACKGROUND OF THE INVENTION1. Technical Field of the InventionThe present invention relates in general to three degree of freedom mechanical manipulators. It more specifically relates to a mechanism or interface that can serve as a mechanical linkage for actively powered devices such as compliant robotic manipulators and force-reflecting hand controllers, and as a passive device such as a manual input device for computers and other systems.2. Description of the prior ArtExisting three degree of freedom manipulators employ general linkage configurations found both intwo and higher degree of freedom manipulators. The simplest linkage configuration, called "direct-drive" has each actuator located directly at the joint between a pair of adjacent links: a distal link and a proximal link. Typically, the proximal link, that is the link closest to the base, is attached to the actuator fixed element or the stator, and the distal link is attached directly to the actuator moving element or the rotor. Thedisadvantage of direct drive manipulators is that each link must carry both the inertia and weight of the next joint actuator. Consequently, to support this weight, larger actuators, as well as stiffer and more massive links are required. This, in turn, further increases inertia and weight.An alternate conventional linkage employs one or more transmission elements of various types between an actuator and the distal component which it drives. One class of conventional transmissions comprises more complicated elements such as gears and ball-screw drives and gear-like reducers, and belt and pulley or cable and pulley mechanisms. Another class of transmissions is made from linkages composed of simple rotary or prismatic joints and rigid link couplers. These simple joints are typically implemented with ball bearing, or other rolling contact bearing elements. Manipulators employing the simple joint and rigid link transmissions are often called "parallel" or "in-parallel" in the robotics literature. Direct-drive manipulators are termed "serial" or "in-series." Manipulators based on combinations of serial and parallel linkage components have also been developed.The foregoing transmission elements are intended to fulfill one or more of the following roles in manipulator linkages. They serve to transform rotary into linear motion (or vice versa), reduce speed and multiply force (or vice versa), and transfer motion and force from one location in the linkage to another. By incorporating transmissions of the various forms described above, actuators may be located remotely from the joints that they drive. In some manipulators, transmission elements allow all actuators to be mounted on a common base link or ground, thereby reducing significantly the weight and inertia that must be carried, and thus decreasing the power requirements and size for the actuators.The drawbacks of the various higher pair transmissions include backlash in toothed drives, e.g., gears, timing chains, timing belts, and excessive compliance especially in belt and cable systems. Both backlash and compliance can cause inaccuracy in linkage endpoint displacements as measured by sensors located at the actuators. Because backlash results when the teeth of the driving and driven elements loose contact with each other, gears and toothed belts also lead to output force fluctuations. Similarly, slip or creep in some belt and cable systems can also cause force and displacement inaccuracies. Compliance has the further effect of lowering the mechanical bandwidth of the linkage joining endpoint to actuators. Friction, inherent in gear and tensioned belt and cable transmissions, dissipates force applied by the actuators and at the endpoint of a linkage. These friction losses inhibit backdrivability, that is the ability to push a linkage at its endpoint and have it move freely, a vital feature for both passive and active hand controllers, and for the implementation of many compliant robot control strategies."Parallel" configurations exploit beneficial aspects of both transmission and direct-drive linkage designs by allowing the endpoint to be driven by remote actuators while still excluding the higher pair elements and associated cogging, compliance, backlash, and friction described above. In comparison with serial linkages, parallel configurations have more involved mathematical expressions to describe mechanism kinematics, smaller work space for a given set link lengths, and more complex fabrication, tolerancing, and assembly procedures to meet alignment requirements. Failure to meet these tighter alignment requirements can result in link bending, which causes the linkage to seek "preferred locations" that minimize elastic deformation, and in binding friction. These problems grow with the number of closed loops present in the mechanism. However, when executed properly, designs with multiple loops have the advantage of greater structural stiffness because of additional paths that join the linkage endpoint to ground.Passive input devices adhere to the same kinematic design principles described above in relation to powered devices (e.g., manipulators and force reflecting hand controllers). However, as passive input devices do not include actuators, they retain only the collocated motion sensors of powered devices.SUMMARY OF THE INVENTIONThe present invention provides a unique three degree of freedom parallel mechanism or interface that couples three degree of freedom translational displacements at an endpoint, such as a handle, a hand grip, a robot tool, etc., to link rotations about three axes that are fixed with respect to a common base or ground link. The three degrees of freedom correspond to the spatial displacement of the endpoint. Such three degrees of freedom of spatial displacement resolve into Cartesian coordinates (X, Y, Z), and enable movement within a spherical volume.The mechanism of the present invention provides a new overall spatial kinematic linkage composed of a minimal number of rigid links and rotary joints that are arranged in three closed chain loops of six binary (two-joint) and four ternary (three-joint) links. In one embodiment, the mechanism includes 10 rigid links and 12 rotary joints that combine an eight-link, two-loop spherical linkage with a single-loop planar linkage.By mounting rotary joints or actuators at each of the three base axes, rotations can be generated causing the endpoint to move. Conversely, endpoint motion can be measured by transducers that directly sense rotation about each of the linkage's three base axes.The present three degree of freedom parallel does not require electrohydraulic actuation as a mechanical power source. In this invention, the mechanism further conveys mechanical power bidirectionally between the human operator and electromechanical actuators.Briefly, the foregoing and other features of the present invention are achieved by providing a unique three degree of freedom parallel mechanism comprised of a spherical linkage coupled to a planar linkage that can be constructed solely of rigid links and revolute joint pairs, and does not require gears, belts, cable, screw or other types of transmission elements. Consequently, the mechanism is useful in applications requiring full backdrivability, and can serve as the mechanical linkage for actively powered devices such as compliant robotic manipulators and force-reflecting hand controllers, and passive devices such as manual input devices for computers and other systems.All interactions at the endpoint can occur through a single point where only forces, as opposed to arbitrary rigid body moments or couples, are applied. By restricting the mechanism to three degrees of freedom, the present linkage reduces design and fabrication complexity. In addition, the mechanism offers a singularity free work volume within either half of two adjacent hemispheres, and simplifies forward and inverse kinematic equations in comparison with other three degree of freedom "parallel" linkage designs. Furthermore, the present mechanism simplifies component alignment and assembly by virtue of all the base joints (e.g., actuators / sensors) axes (X--X, Z--Z) being aligned along two perpendicular axes in a single plane, and by having all revolute joint axes aligned in one of three perpendicular axes (X--X, Y--Y, Z--Z), compared with other tripod base three and six degree of freedom devices that require 120 degree axis separation at their bases. Reference is made to U.S. Pat. No. 4,976,582 to Clavel, which is incorporated herein by reference.BRIEF DESCRIPTION OF THE DRAWINGThe above and other features of the present invention and the manner of attaining them, will become apparent, and the invention itself will be best understood, by reference to the following description and the accompanying drawing, wherein:FIG. 1 is an isometric view of a three degree of freedom parallel mechanism according to the present invention, shown in a "nominal position";FIG. 2 is a simplified planar representation of the mechanism of FIG. 1;FIG. 3 is an isometric view of a spherical linkage forming part of the mechanism of FIG. 1;FIG. 4 is an isometric view of a first closed loop forming part of the spherical linkage of FIG. 3;FIG. 5 is an isometric view of a second closed loop forming part of the spherical mechanism of FIG. 3; FIG. 6 is a simplified flat representation of the first closed loop of FIG. 4;FIG. 7 is a simplified flat representation of the second closed loop of FIG. 5; andFIG. 8 is a simplified flat representation of a closed loop planar linkage forming part of the mechanism of FIG. 1.Similar numerals refer to similar elements in the drawing. It should be understood that the sizes of the different components in the Figures are not in exact proportion or to scale, and are shown for visual clarity and for the purpose of explanation.DETAILED DESCRIPTION OF THE INVENTIONA three degree of freedom mechanism or interface 10 according to the present invention is depicted as a kinematic model in FIG. 1. The mechanism 10 may be a force reflecting interface that forms a part of a three dimensional haptic virtual environment, a three dimensional robotic manipulator, or in higher degree of freedom devices. As used herein, "haptic" perception is the process through which humans explore and evaluate the physical characteristics, such as size, weight, shape, stiffness, viscosity, of objects or fields, such as field of gravity, in their immediate or remote surroundings. Haptic perception of mechanical characteristics involves the cognitive integration of sensory input from displacement velocity and force sensors in the muscles and joints, as well as tactile sensors in the skin induced between the limbs and the environment.The mechanism 10 is comprised of two main components. The first component includes a three degree of freedom spherical linkage 12, and the second component includes a planar linkage 14. As it will be detailed later, the spherical linkage 12 forms the base of the mechanism 10, and includes two closed loops formed of a minimal number of links and single degree of freedom rotary joints. It is termed spherical because the axis lines through all the rotary joints between the links intersect at a common center point O, as would lines drawn normal to the surface of a hypothetical sphere. The planar linkage 14 preferably includes one closed loop (third closed loop) that is similarly formed of a minimal number of links and rotary joints, in which the axis lines of all the rotary joints remain parallel.With reference to FIG. 2, the spherical linkage 12 is represented by an inner circle C1 with a center point O and a radius R1 formed by the addition of extension link (i.e., 104A) as will be explained later in connection with FIG. 1. The inner circle C1 is concentric relative to the outer circle C2 which also has point O as its center. The outer circle C2 has a radius R2, and represents an extended spherical linkageformed by the addition of an extension link (i.e., 106A), as it will be explained later in connection with FIG. 1. The planar linkage 14 is represented by a line that intersects the outer circle C2 at a point S, and that terminates in an endpoint D. The planar linkage 14 includes a fixed length L1, which is the distance between points S and D. In this illustration, point S has a two degree of freedom motion capability, and can move freely along the surface of a fixed spherical volume represented by the circle, while the endpoint D has a one degree of freedom motion capability relative to point S, and is allowed to move radially inward and outward with respect to the spherical center O. As a result, the planar linkage 14 can be considered equivalent to a virtual link VL. Virtual link VL is defined between points O and D, and its length changes to permit the endpoint D to move to any point within a spherically shaped work volume having point O as its center and VL as its radius, provided internal linkage interference avoided. The maximum value of the virtual link VL, or the radius of the spherical work volume is defined by the following equation (1):VL(max)=R2+L1 (1)The spherical linkage 12 is further illustrated in FIGS. 3 through 7. In this particular embodiment, spherical linkage 12 is formed of eight links 101, 102, 103, 104, 105, 106, 107 and 108 that are interconnected by nine joints. The outer bearing elements of three base joints (A, B, C) are connected to the same base. The remaining six joints are rotary joints 121, 122, 123, 124, 125, 126. The axes passing through joints A, B, C, 121, 122, 123, 124, 125, 126 intersect at a center point O. The center point O is also the origin of the Cartesian coordinate axes (X--X, Y--Y, Z--Z).Each link 101, 102, 103, 104, 105, 106, 107, 108 is paired to its neighbors by single degree of freedom rotary joints. In addition, if the base joints A, B, C were actuators (e.g., motors), links 102, 105, and 108 may be extensions to the shafts of the motors B, A, C respectively, and thus can use the motor shaft bearings for their individual joints with ground link 101. The base joints A, B, C can drive and be driven by the endpoint D.The location of rotary joint 127 corresponds to endpoint S1 on the inner circle C1 in FIG. 2, and enjoys a three degree of freedom displacement capability. Rotary joint 127 may be connected to one or more external endpoints, for instance endpoint D, through various connecting mechanisms. One such exemplary connecting mechanism is the planar linkage 14.Thus, all the mechanism force and motion is transferred through transmissions made of rigid links, and single degree of freedom rotary ball bearing joints with low friction and minimal backlash.The planar linkage 14 illustrated in FIGS. 1, 2 and 8 is a five-link, closed-loop mechanism formed by the addition of two rigid links 109 and 110 and the extension of links 104 and 106 into rigid links 104A and 106A, respectively, to the spherical linkage 12 at link 105. The endpoint D is connected to the rotary joint 127, via the planar linkage 14 and an extension link 110A of link 110.Link 109 is connected to the spherical linkage 12 by means of rotary joint 127. Extension link 106A is connected to the spherical linkage 12 by means of link 106 and rotary joint 124. Link 110 is connected at one of its ends to the spherical linkage 12 by means of rotary joint 129, which, in turn, is connected to extension link 106A. The other end of link 110 is connected to rotary joint 128, and integrally extends into extension link 110A that terminates in endpoint D. Link 104A is connected to the spherical linkage 12 by means of rotary joint 123. In the present embodiment, all the longitudinal axes x--x passing through the rotary joints 124, 127, 128, 129 remain parallel with respect to each other. The linkage 14 allows the endpoint D to be moved radially inward and outward with respect to the center O of the spherical linkage 12.Link 109 is connected at one of its ends to the outer bearing element 128A of joint 128, and at its other end to the outer bearing element 127A of joint 127. In an exemplary embodiment of the present invention the planar polygon formed by links 106, 106A, 109 and 110 may be, but is not required to be a parallelogram.Link extension 104A is connected at one of its ends to the inner bearing element 127B of joint 127, and at its other end to the outer bearing element 123A of link 123. Link 104A is capable of rotating around the axis of joint 127, as shown by the arrow P.Link 105 is rotatably connected at one of its ends to the inner bearing element 123B of joint 123, and at its other end to the outer bearing element 124A of joint 124. Link 105 is capable of rotating around the axis of joint 123, as indicated by the arrow Q.Link extension 106A is integrally (or rigidly) connected to one end of link 106. Link 106 is connected at its other end to the inner bearing element 124B of joint 124, and link 106A is connected at its opposite end to the outer bearing element 129A of joint 129. Link 106 and link extension 106A are capable of rotating around the axis of joint 124, as indicated by the arrow R. The plane formed by link 106, extension link 106A and the parallel axes of joints 124 and 129 remains parallel to the Cartesian axis X--X. Consequently, link extension 106A and link 109 are maintained in a parallel relationship regardless of the orientation or displacement of the endpoint D.。