Landmark-based navigation for a mobile robot
landmark icon 翻译

landmark icon 翻译landmark icon翻译:地标图标。
双语例句:1. The landmark icon represents an important tourist attraction on the map.地标图标在地图上代表着一个重要的旅游景点。
2. The app uses different landmark icons to indicate different categories of restaurants.这个应用程序使用不同的地标图标来表示不同类型的餐厅。
3. The landmark icons are easily recognizable, making it easier for users to find their desired destinations.地标图标易于识别,使用户更容易找到他们想去的目的地。
4. The landmark icon for the Eiffel Tower is an iconic symbol of Paris.埃菲尔铁塔的地标图标是巴黎的标志性象征。
5. The navigation app uses landmark icons to show nearby hotels, restaurants, and attractions.导航应用程序使用地标图标来展示附近的酒店、餐厅和景点。
6. The design of the city map includes landmark icons for popular landmarks and attractions.城市地图的设计包括受欢迎的地标和景点的图标。
7. Users can customize the landmark icons in the app to better suit their preferences.用户可以在应用程序中自定义地标图标,以更好地满足自己的喜好。
关于地理位置问路指路的字词句英文
关于地理位置问路指路的字词句英文一、引言:地理导航的语言艺术In the intricate web of urban landscapes and sprawling countryside, asking for directions and offering guidance have evolved into a subtle art form, one that relies heavily on the precise use of words and phrases tailored to geographical contexts. From the bustling streets of megacities to the serene paths of quaint villages, the language of navigation transcends mere utility, imbuing interactions with a sense of cultural nuance and human warmth. This essay delves into the realm of geographical wayfinding, exploring the rich vocabulary and idiomatic expressions that facilitate seamless communication between strangers in search of a common destination.二、基础词汇:构建导航的基石At the heart of any directional discourse lies a foundation of essential words and phrases. "Left" and "right" serve as the compass points of street-level navigation, guiding pedestrians and drivers alike through a labyrinth of intersections. "Straight ahead" and "turn around" offer clear directives for maintaining course or reversing direction. Beyond these basics, "north," "south," "east," and "west" provide a framework for more complex orientations, especially in areas with prominent landmarks or recognizable geographical features. However, the true magic lies in the artful blend of these basic elements with more specific descriptors like "past the red building," "on the corner of Elm and Oak," or "across from the park entrance," which instantly paint vivid mental maps in the listener's mind.三、地域特色:方言与习语的魅力Geography not only shapes the landscape but also influences the language used to navigate it. Each locale boasts its own unique blend of colloquialisms and idiomatic expressions that reflect local culture and history. In New York City, one might hear "make a left on Fifth" or "head uptown" to signify specific directions. In London,"mind the gap" becomes more than a safety warning; it's a cultural touchstone. And in the rural south of the United States, phrases like "down the road a piece" or "over yonder" evoke a sense of community and familiarity, even among strangers. These regional variations enrich the experience of asking for directions, making each encounter a miniature cultural exchange.Moreover, the use of landmarks as reference points is ubiquitous across cultures. From the Eiffel Tower in Paris to the Golden Gate Bridge in San Francisco, these iconic structures serve as universal signposts, simplifying navigation for locals and visitors alike. However, smaller, lesser-known landmarks—such as a particular tree, a street art mural, or a local café—can often be even more effective in orienting those in the know, fostering a sense of belonging and insider status among those who share the knowledge.四、技术融合:现代导航的革新As technology advances, the language of navigation is undergoing a transformative shift. While traditional words and phrases remain vital, they are increasingly complemented by digital tools that revolutionize the way we find our way. GPS navigation systems, smartphone apps, and online maps have made it possible to pinpoint locations with unprecedented accuracy, often rendering verbal directions redundant. Yet, the human element of asking for directions remains invaluable, offering a chance for connection and the unexpected discovery of hidden gems off the beaten path.Moreover, the integration of technology has inspired new linguistic innovations. V oice-activated assistants like Siri and Alexa have introduced a whole new vocabulary of commands for seeking directions, blending the convenience of technology with the familiarity of conversational language. In this digital age, the art of navigation has evolved into a symphony of human ingenuity and technological prowess, where ancient wisdom meets cutting-edge innovation.总结:地理导航语言是一幅由基本词汇、地区差异和技术进步共同编织而成的多层面锦缎。
导航系统用户手册.pdf_1702086905.8244574说明书
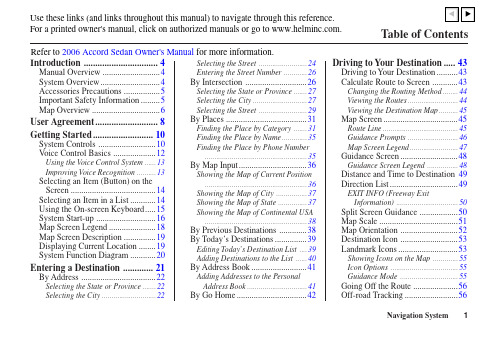
Introduction (4)Manual Overview (4)System Overview (4)Accessories Precautions (5)Important Safety Information (5)Map Overview (6)User Agreement (8)Getting Started (10)System Controls (10)V oice Control Basics (12)Using the Voice Control System (13)Improving Voice Recognition (13)Selecting an Item (Button) on theScreen (14)Selecting an Item in a List (14)Using the On-screen Keyboard (15)System Start-up (16)Map Screen Legend (18)Map Screen Description (19)Displaying Current Location (19)System Function Diagram (20)Entering a Destination (21)By Address (22)Selecting the State or Province (22)Selecting the City (22)Selecting the Street (24)Entering the Street Number (26)By Intersection (26)Selecting the State or Province (27)Selecting the City (27)Selecting the Street (29)By Places (31)Finding the Place by Category (31)Finding the Place by Name (35)Finding the Place by Phone Number (35)By Map Input (36)Showing the Map of Current Position (36)Showing the Map of City (37)Showing the Map of State (37)Showing the Map of Continental USA (38)By Previous Destinations (38)By Today’s Destinations (39)Editing Today’s Destination List (39)Adding Destinations to the List (40)By Address Book (41)Adding Addresses to the PersonalAddress Book (41)By Go Home (42)Driving to Your Destination (43)Driving to Your Destination (43)Calculate Route to Screen (43)Changing the Routing Method (44)Viewing the Routes (44)Viewing the Destination Map (45)Map Screen (45)Route Line (45)Guidance Prompts (46)Map Screen Legend (47)Guidance Screen (48)Guidance Screen Legend (48)Distance and Time to Destination49Direction List (49)EXIT INFO (Freeway ExitInformation) (50)Split Screen Guidance (50)Map Scale (51)Map Orientation (52)Destination Icon (53)Landmark Icons (53)Showing Icons on the Map (55)Icon Options (55)Guidance Mode (55)Going Off the Route (56)Off-road Tracking (56)Table of ContentsUse these links (and links throughout this manual) to navigate through this reference.For a printed owner's manual, click on authorized manuals or go to .Refer to 2006 A ccord Sedan Owner's Manual for more information.Navigation System1Table of ContentsViewing/Saving the CurrentLocation (57)Pop-ups and Disclaimers (58)Changing the Route (59)Waypoints (59)Rerouting (61)Changing Your Destination (62)Changing Your Destination (othermethods) (63)Find Nearest (Voice command) (63)Go Home (Voice command) (63)Entering a Destination from the MenuScreen (while on route) (63)Continue Trip Screen (63)Information Features (64)Information Screen (64)Trip Computer (64)V oice Command Help (65)Map Legend (66)Calendar (66)Editing Date (67)Entering Your Schedule (67)Calculator (68)Unit Conversion (68)Key to Zagat Ratings....................69System Set-up. (70)Set-up Mode (70)Set up Screen (first) (70)Brightness (70)Volume (70)Display (71)Guidance Prompts (72)Contrast (72)Set up Screen (second) (72)Personal Information (73)Address Book (73)Home Address (76)PIN Number (76)User Name (77)Previous Destinations (77)Routing & Guidance (78)Rerouting (78)Unverified Area Routing (79)Edit Avoid Area (83)Edit Waypoint Search Area (85)Guidance Mode (86)Vehicle (86)Off-road Tracking (86)Correct Vehicle Position (87)System Information (88)Basic Settings (88)Keyboard Layout (88)Units (mile or km) (88)Voice Recognition Feedback (88)Voice (88)Clock Adjustment (89)Color (89)Map Color (90)Menu Color (90)System Initialization (91)System Initialization (91)Entering the Security Code (91)GPS Initialization (92)Map Matching (92)System Limitations (93)Database Limitations (94)Customer Assistance (95)Reporting Errors (95)Honda Automobile CustomerService (95)Obtaining a Navigation UpdateDVD (95)Changing the DVD (96)PC Card (96)Navigation System 2Navigation System3Table of ContentsCoverage Areas (97)Map Coverage (97)U.S. Detailed Coverage Areas ........97Canada Detailed Coverage Areas 101Frequently Asked Questions..106Troubleshooting ......................109Glossary.. (110)Glossary (110)Voice Command Index (113)Global Commands......................113Navigation General Commands .113Navigation Display Commands..114Find Place Commands................115Climate Control Commands.......116Temperature V oice Commands...117Radio V oice Commands .............117CD V oice Commands .................118Information ScreenV oice Commands.....................118Set up Screen (first) Commands.119On-Screen Commands. (120)On-Screen Commands Assist (120)Index (122)。
指南针的发明历史作文英语
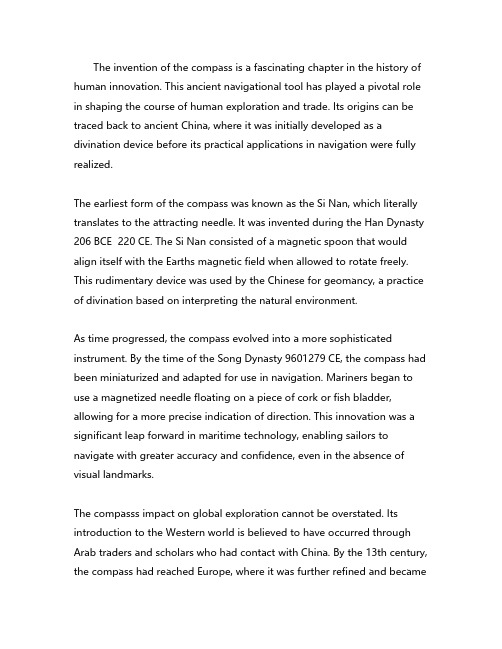
The invention of the compass is a fascinating chapter in the history of human innovation.This ancient navigational tool has played a pivotal role in shaping the course of human exploration and trade.Its origins can be traced back to ancient China,where it was initially developed as a divination device before its practical applications in navigation were fully realized.The earliest form of the compass was known as the Si Nan,which literally translates to the attracting needle.It was invented during the Han Dynasty 206BCE220CE.The Si Nan consisted of a magnetic spoon that would align itself with the Earths magnetic field when allowed to rotate freely. This rudimentary device was used by the Chinese for geomancy,a practice of divination based on interpreting the natural environment.As time progressed,the compass evolved into a more sophisticated instrument.By the time of the Song Dynasty9601279CE,the compass had been miniaturized and adapted for use in navigation.Mariners began to use a magnetized needle floating on a piece of cork or fish bladder, allowing for a more precise indication of direction.This innovation was a significant leap forward in maritime technology,enabling sailors to navigate with greater accuracy and confidence,even in the absence of visual landmarks.The compasss impact on global exploration cannot be overstated.Its introduction to the Western world is believed to have occurred through Arab traders and scholars who had contact with China.By the13th century, the compass had reached Europe,where it was further refined and becamean indispensable tool for explorers such as Marco Polo and Vasco da Gama.One of the most significant contributions of the compass to world history was its role in the Age of Discovery.The ability to navigate with precision across vast oceans opened up new trade routes and facilitated the exchange of goods,ideas,and cultures between continents.The compass was instrumental in the voyages of Christopher Columbus,who used it to cross the Atlantic Ocean and discover the Americas in1492.The compass also played a crucial role in the development of cartography. With the ability to maintain a steady course,mapmakers could create more accurate charts and maps,which in turn improved navigation and exploration.This led to a better understanding of the worlds geography and the establishment of more efficient sea routes.In addition to its maritime applications,the compass has had a profound impact on military strategy.Armies could move with greater speed and precision,knowing the direction they were traveling.This was particularly important during the era of empirebuilding,where control over territory often hinged on the ability to move troops and supplies quickly and efficiently.The compasss influence extends beyond the physical realm.It has become a metaphor for guidance and direction in life.The phrase finding ones compass is often used to describe the process of discovering ones purpose or moral direction.Despite the advent of modern navigational tools such as GPS,the compass remains a reliable and essential tool for navigators,hikers,and adventurers. Its simplicity and lack of reliance on electronic systems make it a preferred choice in situations where advanced technology may fail.In conclusion,the invention of the compass was a transformative moment in human history.From its humble beginnings as a divination tool in ancient China to its critical role in global exploration and the development of modern navigation,the compass has left an indelible mark on our world. Its story is a testament to the power of human ingenuity and the enduring impact of simple yet profound ideas.。
Metric localization using a single artificial landmark for indoor mobile robots

Metric Localization Using a Single Artificial Landmarkfor Indoor Mobile RobotsGijeong Jang, Sungho Kim, Jeongho Kim and Inso KweonDepartment of Electrical Engineering & Computer ScienceKorea Advanced Institute of Science and Technology (KAIST)373-1, Guseong-dong, Yuseong-gu, Daejeon, Koreagjjang@rcv.kaist.ac.kr, shkim@rcv.kaist.ac.kr, jhkim@rcv.kaist.ac.kr, iskweon@kaist.ac.krAbstract – We present an accurate metric localization method using a simple artificial landmark for the navigation of indoor mobile robots. The proposed landmark model is designed to have a three-dimensional, multi-colored structure and the projective distortion of the structure encodes the distance and heading of the robot with respect to the landmark. Catadioptric vision is adopted for the robust and easier acquisition of the bearing measurements for the landmark. We propose a practical EKF based self-localization method that uses a single artificial landmark and runs in real time.Index Terms – metric localization, artificial landmark, catadioptric vision, EKFI.I NTRODUCTIONMany vision-based self-localization methods using artificial or natural landmarks have been proposed. Natural landmarks are appropriate for both indoor and outdoor environments. They are selected considering their geometrical or photometrical features. Mobile robots analyze their characteristics and find self-pose using them [1] [2]. However, it is a formidable task to extract consistent and reliable landmarks in a complex environment. On the other hand, an artificial landmark is a very simple and powerful tool for self-localization in indoor environments [3]. Advantages of landmarks based on specific patterns include easier detection, identification, and tracking [4]. For example, self-similar gray pattern landmarks are used as navigation and localization aids [5].The commonly used method for computing the pose estimates of the robot is based on the bearing measurements of more than three landmarks [6]. The general approach for the method starts from detecting, identifying, and tracking multiple landmarks spread over the workspace [7]. To mitigate the difficulty of managing multiple landmarks, some approaches employ a single landmark of a plane pattern [1] [8] [9]. The projective distortion of the pattern makes it possible to calculate the relative pose of the robot from the pattern. However, the sensitivity of projective distortion relative to the change of viewing direction is severely reduced from the frontal view. For example, a change of D10 in viewing direction from the frontal view introduces a projective distortion of only 1.5%.In this paper, we explore a global and incremental localization method for a mobile robot working in an indoor environment. We propose a simple artificial landmark model and a practical localization algorithm that uses bearing measurements of a single landmark. The proposed geometric beacon is a special type of target that can be reliably observed in successive sensor measurements and that can be accurately described in concise geometric terms. The novel 3-D structure of the pattern makes it possible to accomplish accurate single view-based localization in real time.II.L ANDMARK M ODELFig. 1 shows the appearance of the proposed landmark. The color pattern is composed of two horizontally neighboring color patches. The color pattern subtends an angle of D45 with respect to two supporting planes. The two supporting planes intersect at the right angle and form a black line. The relative position of the line with respect to the color pattern varies as a function of camera orientation.Fig. 1 Structure of LandmarkThe brightness variation caused by the illuminant change is reduced by the use of the chromaticity color space:[])/()/(][BGRBBGRRbr++++= (1) To make each landmark distinguishable from the environment, multiple colors that are distant in the chromaticity color space are selected.2005 IEEE/RSJ International Conference on Intelligent Robots and SystemsIII.L ANDMARK D ETECTION AND T RACKING The catadioptric vision sensor (omnidirectional camera) has a very wide field of view [10]. Another advantage of this camera is that it provides direct reports on horizontal bearing measurements. These facts simplify the problem of bearing-only localization.As shown in Fig. 2, if the surface of the mirror is formed by revolving a hyperbola around the Z-axis, all the rays directed to the focal point of the mirror reflect on the mirror surface and turn to the principal point of the lens.Consequently, if a robot moves on a flat plane, the patterns on the height Z invariably appear on the same radius in the omnidirectional image as shown in Fig. 3. The black circle is the horizontal line that is the projection of the horizontal plane in the omnidirectional image. As the robot begins to move and takes an image sequence, the points on the horizontal plane move only along the horizontal line.Fig. 2 Configurations of omnidirectional cameraFig. 3 Horizontal line for omnidirectional imageFig. 4 is a special case of an omnidirectional spatiotemporal image, an Omnidirectional Route Panorama (ORP), which is the sequential stacking of horizontal lines taken by the robot moving on a plane [11].A simple edge operation with nonmaxima suppression on ORP makes feature point tracking extremely easy. For example, a Canny edge operation [12] finds the edge trace. This means that the data association problem in localization can be solved simply by tracing the edge of ORP. In addition, memory can be saved for scene description and real-time edge tracking is feasible.Because of the wide field of view, the landmark can be detected in any pose of the vehicle. Here, a simple correlation-based detector is used to detect the angular range of the color pattern with the bearing of the rear vertical black line in thehorizontal line.Fig. 4 Omnidirectional route panoramaIV.L OCALIZATION A LGORITHMIn this section, we present an algorithm that allows the robot to verify its absolute position from a view of a single landmark in one image. Based on the assumption that an indoor mobile robot navigates on a flat floor, we only seek the robot’s two-dimensional location and orientation with respect to the landmark.We assume that the origin of the reference coordinate is set as the location of the landmark in the 2-D floor map for localization of the mobile robot. We also assume that the landmark is positioned on the level of the horizontal plane of the omnidirectional mirror.In previous approaches based on a single landmark with a plane pattern, the sensitivity of projective distortion relative to the change of viewing direction is very low from the frontal view.Assuming orthographic projection [13] and a small viewing angle, Fig. 5 shows the projection model of a plane pattern.Fig. 5 Configuration of projection of plane landmark (top view)The relation between α and θ isαcos⋅=′ll (2)αθcos⋅⋅≈lk):(constk (3) frameazimuthααθsin ⋅⋅−≈l k d d . (4)From (4), we observe that the sensitivity of observationangle θwith respect to viewing direction α becomes very small from the frontal view when α is small.Localization by observing three known points can be accomplished simply by solving trigonometric equations. However, this method is inaccurate in the degenerative position. The modified version of the method [6] solves the problem and leads to an accurate solution. However, this is also a batch method that assumes very high measurement accuracy. For this reason, it is not adequate for robot applications that require real-time performance. The proposed localization method is based on Extended Kalman Filtering (EKF), which is a compact and fast state estimation algorithm for real-time applications.Fig. 6 Geometric configuration of the vehicle-landmark systemFig. 6 shows the geometric relation between the proposed landmark and the vehicle pose. With the help of the catadioptric vision sensor, we obtain three bearings of a point 1P , 2P , 3P .We denote the position and orientation of the vehicle by the state vectorT v v y x ),,(φ=sand the error covariance of the vehicle state by⎟⎟⎟⎠⎞⎜⎜⎜⎝⎛=φφφφφφP P P P P P P P P P yxy yy yxx xy xxThe measurement vector is composed of the measured bearings of the three points in the artificial landmarkTt ),,(321θθθ=zUsing this relatively simple model of the system and sequential measurements of three bearings, we estimate the pose of the robot represented by the state s and the uncertainty of the pose represented by the covariance P .A. Initial Pose CalculationEKF requires initialization of the state. To find the initial state, we calculate the pose of the vehicle with measurements for three known points. However, the equations generated from the geometric relations are liable to fail in the degenerate configuration. For this reason, the initial pose of the robot is calculated by applying simple trigonometry and some feasible assumptions. It is relatively accurate. Moreover, EKF will improve the accuracy gradually in the next step.With the proposed configuration, the depth variation of the landmark itself is much smaller than the distance between the camera and the landmarks. In addition, the portion of the viewing angle for the landmark is small at a reasonable distance. From these observations, we assume an orthographic projection model and an orthoperspective projection model, which has the characteristic of parallel projection and parallel to projective projection, as shown in Fig. 7 [13].Fig. 7 Geometric configuration for initial pose calculationThe vehicle location is represented in polar coordinates by the distance from the origin d and the angle αas shown in Fig. 6. As auxiliary lines, we set two parallel lines—1l and 2l that are orthogonal to the viewing direction to the origin from the vehicle: 1l intersects the origin 2P and 2l intersects the center point of 1P and 3P . 1dis the distance between 1l and 2l , and 2d is the distance between the vehicle and 2l . Assuming orthographic projection and a small viewing angle⎟⎟⎠⎞⎜⎜⎝⎛−−=−23121tan θθθθα (5)Assuming orthoperspective projection21d d d += (6)2)sin (cos 1αα+=p d (7))()sin (cos 132θθαα−+=p d (8)From the observation 2θ and the calculated value dand α, the vehicle state T v v y x ),,(φ=s can be found as follows:αcos d x v = (9)αsin d y v = (10)2θαπφ−+= (11)B. I ncremental localizationGiven the previously estimated pose of the robot with a large initial error covariance, EKF gradually updates the vehicle pose by alternating the two phases – motion update and measurement update.1) Motion Update :The motion model for a differential-drive vehicle follows a nonlinear dynamics model, which is represented by a nonlinear function:),,(111−−−=t t t t f w u s s (12)where u denotes motion control for change of steering angle and moving distance and w is the corresponding noise. We assume this noise follows a zero mean Gaussian distribution. The robot’s motion in each time step is modeled as a simple form:)()2/)(cos(,1,1,2,211,,t t t t t t v t v w u w u x x +⋅+++=−−φ (13))()2/)(sin(,1,1,2,211,,t t t t t t v t v w u w u y y +⋅+++=−−φ (14))(,2,21t t t t w u ++=−φφ (15)Temporal update using EKF requires prediction of thestate and the covariance.First, we project the state ahead according to the motion model assuming no additive motion error.),,ˆ(ˆ110u s s−−−=t t t f (16)Second, we project the error covariance ahead.T t t t T t t t t W Q W A P A P 11−−−+= (17)Because the system is nonlinear, we should linearize thesystem dynamics at each given step. Linearization is accomplished by calculating the Jacobian matrix for the state transition:),,ˆ(11][][],[0u ss −−∂∂=t t j i j i f A (18)),,ˆ(11][][],[0u sw −−∂∂=t t j i j i f W (19)We let the process noise covariance Q (for moving distance and rotation angle) be diagonal and constant. The magnitude is set by observing the variance of unmodeled effects such as wheel slippage.2) Measurement Update :The measurement model for the angle measurements is the function of vehicle state and measurement noise:),(t t t h v s z = t v : measurement noise (20)The feature points in the artificial landmark are transformed from the world coordinates to the vehicle coordinates (Fig. 8). Setting a vehicle pose, the predicted measurement angle is calculated.Fig. 8 illustration for measurement modelThe position of the landmark in the robot frame is)(WW i RW R i R x y y −= (21)Where, W x is the vehicle position in the world frame and RWR is the rotation matrix changing the frame from world to robot. That is⎟⎟⎠⎞⎜⎜⎝⎛−−⎟⎟⎠⎞⎜⎜⎝⎛−=⎟⎟⎠⎞⎜⎜⎝⎛′′v v y y x x y x φφφφcos sin sin cos (22) Therefore, the measurement angle is()x y m ′′=−/tan 1θ (23)Linearization is accomplished by calculating the Jacobian matrix for the measurement matrix:),ˆ(][][],[0ss −∂∂=t j i j i h H (24)In the measurement update stage, we compute the Kalmangain by1)(−−−+=t T t t t T t t t R H P H H P K (25)The noise covariance t R of the measurements is determined by considering the image resolution. In (25), )(t T t t t R H P H +− means the projected uncertainty in the measurement space. The state is updated by weighting between the measured and predicted state as)),ˆ((ˆˆ0s z s s−−−+=t t t t t h K (26)The Kalman gain K is set to minimize the a posterioriestimate error covariance. Finally, we update the error covariance as−−=t t t t P H K I P )( (27)This alternating recursive algorithm provides the smoothing effect for process and measurement noise. It enhances state estimation accuracy and informs uncertainty of the estimated state, which is useful in mobile robot localization.V. E XPERIMENTSWe tested the proposed algorithm in indoor environments with a differential-drive mobile platform of Pioneer II (Fig. 9). It carries a laptop computer with a Pentium IV processor clocked at 1.6 GHz and an omnidirectional color camera capturing 30 frames/s with a resolution of 640 × 480 pixels. The artificial landmark was installed at the corners of the indoor environment. The length of equilateral sides of the landmark were set to be 10 cm and the red-blue colored patch was attached for easier detection and tracking. The robot moved at 10 cm/s and the experiment was conducted in real time.Fig. 9 System configurationThe experimental results of the localization are shown in Figs. 10 and 11. A red line denotes the real path. The center of the route is (2, 2) and the radius is 0.9 m. The vehicle starts at the point (2, 1.1) and moves counterclockwise.Fig. 10 Localization result using initial pose estimation methodFig. 11 Result of incremental localization based on EKFThe result using the initial pose calculation method explained in section IV-A is shown in Fig. 10. We can observe that the result is relatively accurate, but the longer the distance between the robot and the landmark, the larger the variance of the estimates. In the experiment, the localization accuracy is mainly dependant on three factors—distance from the landmark, image resolution, and landmark size.Fig. 11 shows the incremental localization result when EKF is adopted. There is a smoothing effect on the direct estimates. The estimation error is generated from systematic errors such as measurement bias, uneven floor, and misalignment between camera and omnidirectional mirror. This error negates the assumption of Gaussian noise.A simulation was conducted to observe the performance of the proposed method where the added noise is Gaussian. The path was the same as for Fig. 10 and noise with D 3.0 standard deviation was applied to the measurements. Simulation results on state estimation error for each entry—φ , ,v v y x —are shown in Fig. 12. The estimate uncertainties become gradually smaller and the estimate errors exist inside the σ3 boundary of the error covariance.Fig. 12 The convergence of the state estimationThe statistical report on estimation error for 200 rotations is shown in TABLE I. The mean positional error is about 7 cm and is reasonable for indoor application.TABLE IE STIMATION E RROR FOR V EHICLE S TATEx(cm)y(cm)Theta(degree) Mean 4.35 4.89 0.99 Maximum 23.83 20.67 4.75VI.C ONCLUSIONWe proposed a simple artificial landmark model and metric localization algorithm for indoor mobile robots.The proposed algorithm based on EKF makes use of a single artificial landmark. The single landmark based algorithm makes the measurement process simple and EKF gradually enhances the estimation accuracy in real time. A geometric method is also proposed in the paper to enable mobile robots to initialize their positions autonomously and to recalculate their pose in case they get lost.The experimental results show the practicality of the method. The experimental results are quite accurate, taking into account the use of only a small single passive landmark.The most deterministic factor in the proposed method is the accuracy of the extracted bearing information for a given image resolution and given setup of artificial landmark.A CKNOWLEDGEMENTThis research has been supported by the Korean Ministry of Science and Technology for National Research Laboratory Program (Grant number M1-0302-00-0064).R EFERENCES[1]V. Ayala, J. B. Hayet, F. Lerasle and M. Devy, “Visual Localization of aMobile Robot in Indoor Environments using Planar Landmarks”, Proceedings of 2000 IEEE International Conference on Intelligent Robots and Systems.[2]M. Mata, J. M. Armingol, A. de la Escalera and M. A. Salichs, “A VisualLandmark Recognition System for Topological Navigation of Mobile Robots”, Proceedings of 2001 IEEE International Conference on Robotics & Automation.[3]Gijeong Jang, Sungho Kim, Wangheon Lee and Inso Kweon, "ColorLandmark Based Self-Localization for Indoor Mobile Robots", Proceedings of 2002 IEEE International Conference on Robotics & Automation.[4]Sung Joon Ahn, W. Rauh and M. Recknagel, “Circular Coded Landmarkfor Optical 3D-Measurement and Robot Vision”, Proceedings of the 1999 IEEE/RSJ International Conference on Intelligent Robots and Systems. [5]Amy J. Briggs, D. Scharstein, D. Braziunas, C. Dima and P. Wall,“Mobile Robot Navigation Using Self-Similar Landmarks”, Proceedings of 2000 IEEE International Conference on Robotics & Automation.[6]I. Shimshoni, “On Mobile Robot Localization from Landmark Bearings”,IEEE Transactions on Robotics and Automation, vol. 18, no. 6, December 2002.[7]Huoshehg Hu and Dongbing Gu, "Landmark-based Navigation ofIndustrial Mobile Robots", International Journal of Industry Robot, vol.27, no. 6, 2000, pp 458–467.[8]J. M. Buenaposada and L. Baumela, "Real-time Tracking and Estimationof Plane Pose", Proceedings of 2002 IEEE International Conference on Pattern Recognition.[9]G. Simon, A. W. Fitzgibbon and A. Zisserman, "Markerless Trackingusing Planar Structures in the Scene", Proceedings of 2000 IEEE and ACM International Symposium on Augmented Reality.[10]S. Baker and S. K. Nayar, “A Theory of Single-Viewpoint CatadioptricImage Formation”, International Journal of Computer Vision, vol. 35, no.2, pp 1735–196, 1999.[11]Yasushi Yagi, Kousuke Imai, Masahiko Yachida, “Iconic Memory-basedOmnidirectional Route Panorama Navigation”, Proceedings of 2003 IEEE International Conference on Robotics & Automation.[12]J. Canny, “A Computational Approach to Edge Detection”, IEEETransaction on Pattern Analysis & Machine Intelligence, vol. 8, pp 679–698, 1986.[13]Gang Xu and Zengyou Zhang, "Epipolar Geometry in Stereo, Motion andObject Recognition", Kluwer Academic Publishers.。
雅思阅读真题精选:orientatinofbirds

雅思阅读真题精选:orientatinofbirds为了帮助大家在备考雅思的时候能够练习到更多的真题材料,下面小编给大家带来雅思阅读真题精选:orientatin of birds,望喜欢!雅思阅读真题精选:orientatin of birdsMigration of BirdsOrientation andNavigationA .Factors in a bird'senvironment select for the expression of migratory behavior, leading to theevolution of a migratory pattern or, on the other hand, to the loss ofmigratory abilities. Factors in the environment function to provide direct,proximal stimulation for the physiological preparation for migration. Factorsin the environment also provide information that allows birds to navigateduring migratory passage. Navigation requires knowing three things: currentlocation, destination, and the direction to travel to get from the currentlocation to the destination. Humans eventually learned to use both the sun andthe stars to obtain this information. Recently we invented more precisesatellite-based technologies that have made these celestial cues fordetermining geographic positions superfluous and developed electronic aids tonavigation that allow orientation without reference to the natural environment.Birds have successfully navigated for eons using environmental information.B .Birds are not alone in their ability to navigatelong distances. Fish, mammals, and even insects make migratory journeys. Butthe clarion honking of geese moving in huge skeins across the vault of theheavens, the twittering of migrants filtering down out of the night sky, theflocks of newly arrived birds filling woodlands, fields, and mudflats makes usmost aware of the seasonal movements of birds and fills us with awe and wonderasto how such a magnificent event can be accomplished season after season,year after year, with such unerring precision.C .Of the three kinds of information necessary fornavigation, we know something about the environmental cues that birds use to orienttheir migratory flight in the proper direction. On the other hand, there alsois well-supported experimental evidence that birds use neither the positions ofthe sun or the stars to know where they are or where they are to go. It hasbeen shown, however, that birds must learn both the location of the winteringarea as well as the location of the breeding area in order to navigateproperly, but we have no idea what information they are learning. Nor do weknow what cues birds use to know the location of their migratory destinationwhen they are in their wintering locale, often thousands of miles away. Therecapture of banded birds at the same places along the route of the migratoryjourney in subsequent years suggests that some species also learn the locationof traditional stop-over sites, but how they do that remains a mystery.Vector NavigationD.European Starlings passthrough Holland on their migration from Sweden, Finland, and northwesternRussia to their wintering grounds on the channel coast of France and thesouthern British Isles. Perdeck transported thousands of starlings from TheHague to Switzerland, releasing these banded birds in a geographic location inwhich the population had never had any previous experience. The subsequentrecapture of many of these banded birds demonstrated that the adults, which hadpreviously made the migratory flight, knew they had been displaced and returnedto their normal wintering range by flying a direction approximately ninetydegrees to their usual southwesterly course.The juveniles, which had nevermade the trip before, in contrast, continued to fly southwest and wererecaptured on the Iberian peninsula. These first-year birds "knew"what direction to fly, but did not recognize they had been displaced, thusending up in an atypical wintering range. In subsequent years these now adultbirds returned to again winter in Spain and Portugal. Coupled with anotherdisplacement of starlings to the Barcelona coast in Spain, Perdeck concludedthat the proper direction of the migratory flight was innate, that is,inherited in their DNA, since the naive juveniles could fly that direction, andthat the birds were also genetically programmed to fly a set distance. This isthe same vector or dead-reckoning navigation program Lindberg used to fly fromNew York to Paris by maintaining a given compass direction (or directions) fora predetermined time (i.e., distance). But this study demonstrated that thisnavigation system is modified by experience, since adults knew they were not inHolland any longer and knew that in order to get to their normal winteringgrounds they needed to fly a direction that they had never flown before! Theseresults are truly amazing. And we don't know how they did it.E.Displacement studies in the Western Hemisphere usingseveral species of buntings also demonstrated that birds recognized they hadbeen moved and could fly appropriate, yet unique, routes to return to theirnormal range. Yet adult Hooded Crows transported latitudinally by over 600 km fromwintering grounds in the eastern Baltic to northwestern Germany failed torecognize this displacement. In the spring they oriented properly but migratedto Sweden, west of their normal breeding range. This species used vectornavigation, but did not know the location of its traditional destination. Sinceit is generallyaccepted that migratory behavior evolved independently againand again in different bird populations, a single explanation to fit all casesperhaps should not be expected.Orientation CuesF .Most of theeffort applied to understanding how birds make a migratory flight has beendirected toward environmental cues that birds use to maintain a particularflight direction. These cues are landmarks on the Earth's surface, the magneticlines of flux that longitudinally encircle the Earth, both the sun and thestars in the celestial sphere arching over the Earth, and perhaps prevailingwind direction and odors.Landmarks are useful as a primarynavigation reference only if the bird has been there before. For cranes, swans,and geese that migrate in family groups, young of the year could learn thegeographic map for their migratory journey from their parents. But most birdsdo not migrate in family flocks, and on their initial flight south to thewintering range or back north in the spring must use other cues. Yet birds areaware of the landscape over which they are crossing and appear to use landmarksfor orientation purposes. Radar images of migrating birds subject to a strongcrosswind were seen to drift off course, except for flocks migrating parallelto a major river. These birds used the river as a reference to shift theirorientation and correct for drift in order to maintain the proper ground track.That major geographic features like Point Pelee jutting into Lake Erie or CapeMay at the tip of New Jersey are meccas for bird-watchers only reflects thefact that migrating birds recognize these peninsulas during their migration.Migrating hawks seeking updrafts along the north shore of Lake Superior or theridges of the Appalachians must pay attention to the terrain below theminorder to take advantage of the energetic savings afforded by these topographicstructures.G.Since humans learned to use celestialcues, it was only natural that studies were undertaken to demonstrate thatbirds could use them as well. Soon after the end of the Second World War,Gustav Kramer showed that migratory European Starlings oriented to the azimuthof the sun when he used mirrors to shift the sun's image by ninety degrees inthe laboratory and obtained a corresponding shift in the birds' orientation.Furthermore, since the birds would maintain a constant direction even thoughthe sun traversed from east to west during the day, the compensation for thismovement demonstrated that the birds were keeping time. They knew whatorientation to the sun was appropriate at 9 a.m. They knew what different anglewas appropriate at noon, and again at 4 p.m. It has been recently shown thatmelatonin secretions from the light-sensitive pineal gland on the top of thebird's brain are involved in this response. Not only starlings but homingpigeons, penguins, waterfowl, and many species of perching birds have beenshown to use solar orientation. Even nocturnal migrants take directionalinformation from the sun. European Robins and Savannah Sparrows that wereprevented from seeing the setting sun did not orient under the stars as well asbirds that were allowed to see the sun set. Birds can detect polarized lightfrom sunlight's penetration through the atmosphere, and it has beenhypothesized that the pattern of polarized light in the evening sky is theprimary cue that provides a reference for their orientation.Using the artificial night sky provided byplanetariums demonstrated that nocturnal migrants respond to star patterns.(quite analogous to Kramer's work on solar orientation,Franz Sauerdemonstrated that if the planetarium sky is shifted, the birds make acorresponding shift in their orientation azimuth. Steve Emlen was able to showthat the orientation was not dependent upon a single star, like Polaris, but tothe general sky pattern. As he would turn off more and more stars so that theywere no longer being projected in the planetarium, the bird's orientationbecame poorer and poorer. While the proper direction for orientation at a giventime is probably innate, Emlen was able to show that knowing the location of"north" must be learned. When young birds were raised under aplanetarium sky in which Betelgeuse, a star in Orion of the southern sky, wasprojected to the celestial north pole, the birds oriented as if Betelgeuse was"north" when they were later placed under the normally orientatednight sky, even though in reality it was south!H.Radar studies have shown that birds domigrate above cloud decks where landmarks are not visible, under overcast skieswhere celestial cues are not visible, and even within cloud layers whereneither set of cues is available. The nomadic horsemen of the steppes of Asiaused the response of lodestones to the Earth's magnetic field to find theirway, and the hypothesis that migrating birds might do the same was suggested asearly as the middle of the nineteenth century. Yet it was not until themid-twentieth century that Merkel and Wiltschko demonstrated in a laboratoryenvironment devoid of any other cues that European Robins would change theirorientation in response to shifts in an artificial magnetic field that was asweak as the Earth's natural field. Although iron-containing magnetite crystalsare associated with the nervous system in homing pigeons, Northern Bobwhite,and several species of perching birds, it is unknown whether they areassociated with the sensory receptor for thegeomagnetic cue. An alternatehypothesis for the sensory receptor suggests that response of visual pigmentsin the eye to electromagnetic energy is the basis for geomagnetic orientation.It has been shown, however, that previous exposure to celestial orientationcues enhances the ability of a bird to respond more appropriately when onlygeomagnetic cues are available.Radar observations indicate that birdswill decrease their air speed when their ground speed is augmented by a strongtail wind. We also know that birds can sense wind direction as gusts rufflingthe feathers stimulate sensory receptors located in the skin around the base ofthe feather. Since there are characteristic patterns of wind circulation aroundhigh and low pressure centers at the altitude most birds migrate, it has beenhypothesized that birds could use these prevailing wind directions as anorientation cue. However, there presently is no experimental support for thishypothesis.I.The sense of smell in birds wasconsidered for a long time to be poorly developed, but more recent evidencesuggests that some species can discriminate odors quite well. If the olfactorynerves of homing pigeons are cut, the birds do not return to their home loft aswell as birds whose olfactory nerves were left intact. A similar experiment hasdemonstrated that European Starlings with severed olfactory nerves returnedless often than unaffected control birds even at distances as great as 240 kmfrom their home roosts. And even more interesting, when these starlingsreturned to the nesting area the following spring, the starlings withnonfunctioning olfactory nerves returned at a significantly lower frequencythan the other starlings.J.Considering the array of demonstratedand suggested cuesthat birds might use in their orientation, it is clear thatthey rely upon a suite of cues rather than a single cue. For a migrating birdthis redundancy is critical, since not all sources of orientation informationare equally available at a given time, nor are all sources of informationequally useful in a given situation.Questions 1—8The passage on the previous pages has eight sections labeled A-JWhich section mentions the following?Write the correct letter A-Jin boxes1—8 on your answersheet.1. The possible conclusion for migrating birds.2. A description of olfactory nerves about birds’sdistan ce.3. A description of Latitude about several species.4. Insights from studies how young birds finddirection.5. The ways birds can use for navigation.6. Classes of animals for migratory movements.7. The elements that birds have to navigation.8. The birds use different cues to cope with weather.Questions 9—11Choose THREE letters A-FWrite your answers in boxes 9—11 on your answer sheet.The list below gives some ways of regarding navigation.Which THREE ways are mentioned by the writer of the text?A. a exercise for young adult activityB. Latitude for wintering groundC. Physical surroundingD. Weather cuesE. Satellite-based technologiesF. Places destination when they are in winterQuestions 12—14Do the following statements agree with the information given in thepassage?In boxes 12—14 on your answer sheet, writeTRUE ifthe statement agrees with the informationFALSE ifthe statement contradicts the informationNOT GIVEN if thereis no information on this12. Birds’ migratory flight is affect ed by using natural environment.13. Fish, mammals and insects are not in their ability to makemigratory journeys.14. Birds use cues to find their destination thousands of miles away.雅思阅读需要特别注意的问题有哪些总述篇:雅思考试里的阅读部分答题时间1个小时,要求完成3篇文章共40个题目的解答,总计约3000词。
方向指南针英语缩写

方向指南针英语缩写英文回答:A compass is a navigational instrument that provides direction by indicating the magnetic north. It consists ofa needle that aligns itself with the Earth's magnetic field. The abbreviation for compass in English is "CPS".A compass is a vital tool for navigation, especially in outdoor activities such as hiking, camping, and sailing. It helps us determine our orientation and find our way in unfamiliar territories. For example, if I am hiking in the mountains and want to find my way back to the starting point, I can use a compass to determine the direction ofthe trailhead. By following the compass needle pointing towards the north, I can ensure that I am heading in the right direction.In addition to the needle, a compass usually has markings or a rotating bezel that allows us to measureangles and bearings. This feature is particularly usefulfor more advanced navigation techniques, such astriangulation or orienteering. For instance, if I am trying to locate a specific landmark on a map, I can use a compass to measure the angle between the landmark and a known reference point. By combining this information with the distance, I can accurately determine my position on the map.Compasses have been used for centuries and have playeda significant role in human exploration and discovery. They have guided sailors across vast oceans, explorers through dense jungles, and hikers through rugged terrains. Withouta compass, these journeys would have been much more challenging and potentially dangerous. Therefore, it is essential to have a basic understanding of how to use a compass and interpret its readings.中文回答:指南针是一种导航仪器,通过指示磁北来提供方向。
四大发明指南针素材摘抄

四大发明指南针素材摘抄The compass, one of the Four Great Inventions of ancient China, revolutionized navigation and exploration. 指南针,古代中国的四大发明之一,彻底改变了导航和探险的方式。
Before the compass was invented, sailors had to rely on the stars, landmarks, and the sun to navigate the seas. 在指南针发明之前,水手们只能依靠星星、地标和太阳来航行海洋。
The compass made it possible for sailors to accurately determine their direction, leading to safer and more efficient voyages. 指南针使得水手们能够精确确定方向,从而实现更加安全和高效的航行。
The compass consists of a magnetized needle that aligns itself with the Earth's magnetic field, pointing towards the North magnetic pole. 指南针由一根磁化的指针组成,在地球的磁场作用下自动指向北磁极。
This simple yet ingenious design allowed sailors to navigate with unprecedented accuracy and confidence. 这种简单而巧妙的设计使得水手们能够以前所未有的精度和信心进行导航。
The compass was not only essential for maritime travel but also played a crucial role in land exploration and military strategies. 指南针不仅对海上旅行至关重要,而且在陆地探险和军事战略中也发挥着至关重要的作用。
正确导航作文英语

正确导航作文英语Proper Navigation。
Navigation is the process of finding one's way to a destination, and it is a critical skill that everyone should possess. Whether you are driving to a new place, hiking in the mountains, or sailing on the sea, having proper navigation skills can ensure that you reach your destination safely and efficiently. In this essay, I will discuss the importance of proper navigation and provide some tips on how to navigate effectively.Firstly, proper navigation is essential for safety. Without proper navigation skills, you may get lost, which can be dangerous, especially if you are in an unfamiliar or remote area. For example, if you are hiking in the mountains and you get lost, you may face the risk of exposure to the elements, dehydration, or even wildlife. Similarly, if you are sailing on the sea and you lose your way, you may encounter rough waters, storms, or otherhazards that can put your life at risk.Secondly, proper navigation can help you save time and energy. If you know the best route to your destination, you can avoid unnecessary detours, traffic jams, or other obstacles that can slow you down. Moreover, if you have a clear idea of where you are going, you can plan yourjourney more effectively, such as packing the right gear, bringing enough food and water, or booking accommodationsin advance.So, how can you navigate effectively? Here are some tips:1. Plan your route in advance. Before you set out on your journey, make sure you have a clear idea of where you are going and how you will get there. Use maps, GPS devices, or other tools to help you plan your route.2. Pay attention to landmarks. Whether you are driving, hiking, or sailing, landmarks can help you stay on track. Look for distinctive features such as mountains, rivers,buildings, or buoys that can guide you along the way.3. Keep track of your progress. Use a checklist, a logbook, or a GPS device to keep track of your progress and make sure you are on the right track.4. Be prepared for emergencies. Bring a first-aid kit,a flashlight, a whistle, and other emergency supplies that can help you in case of an unexpected event.In conclusion, proper navigation is a vital skill that can ensure your safety and efficiency when traveling. By planning your route in advance, paying attention to landmarks, keeping track of your progress, and being prepared for emergencies, you can navigate effectively and reach your destination with ease. So, the next time you embark on a journey, make sure you have the proper navigation skills to guide you along the way.。
英语必修三unit5和unit6单词笔记外研版

Unit 5: Places of interest1. cathedral- Meaning: A large and important church.- Example: The Notre-Dame Cathedral in Paris is one of the most famous cathedrals in the world.2. monument- Meaning: A structure or building that is built to honor a person or event.- Example: The Lincoln Memorial in Washington, D.C. is a famous monument dedicated to President Abraham Lincoln.3. historic- Meaning: Having great importance in history.- Example: The Great Wall of China is a historic landmark that attracts millions of visitors each year.4. statue- Meaning: A three-dimensional representation of a person or animal, usually made of bronze or stone.- Example: The Statue of Liberty in New York Harbor is a famous statue that symbolizes freedom.5. landmark- Meaning: A recognizable feature of a location, often used for navigation or as a symbol of a city or country.- Example: The Eiffel Tower is a famous landmark in Paris, France.6. ruins- Meaning: The rem本人ning parts of a building or place that has been destroyed.- Example: The ancient ruins of Machu Picchu in Peru are a popular tourist attraction.7. sightseeing- Meaning: The activity of visiting and seeing interesting places. - Example: When visiting a new city, many people enjoy sightseeing to experience its history and culture.Unit 6: Science and nature1. pollution- Meaning: The presence or introduction of a substance into the environment that has harmful or poisonous effects.- Example: Air and water pollution are major environmental concerns that need to be addressed.2. endangered- Meaning: At risk of bing extinct or extinct in the near future.- Example: The giant panda is an endangered species due to habitat loss and low birth rates.3. ecosystem- Meaning: A biologicalmunity of interacting organisms and their physical environment.- Example: The Amazon R本人nforest is home to a diverse ecosystem of plants, animals, and microorganisms.4. renewable- Meaning: Able to be replenished or replaced by natural processes.- Example: Solar and wind energy are examples of renewable sources of power.5. climate- Meaning: The long-term pattern of weather in a particular area. - Example: Climate change is a global issue that is affectingtemperatures, weather patterns, and sea levels.6. conservation- Meaning: The act of protecting and preserving natural resources and wildlife.- Example: National parks and nature reserves are important for the conservation of biodiversity and ecosystems.7. deforestation- Meaning: The clearing and removal of forests or trees, often for agriculture or development.- Example: Deforestation is a significant environmental issue that contributes to habitat loss and climate change.In conclusion, learning and understanding the vocabulary related to places of interest, science, and nature is essential for students to broaden their knowledge and engage in meaningful conversations about these topics. By familiarizing themselves with these words and their meanings, students can enhance their language skills and deepen their understanding of the world around them.。
关于地点查询的英语作文

关于地点查询的英语作文标题,Exploring the World: A Guide to Location Queries。
In today's interconnected world, the ability to search for and find information about different locations has become an indispensable part of our lives. Whether it's planning a vacation, conducting business, or simply satisfying our curiosity, location queries play a crucial role. In this essay, we'll explore the significance of location queries, the tools and technologies used for them, and their impact on various aspects of society.Introduction:Location queries refer to the process of searching for specific information about a place or a geographical area. With the advent of the internet and advancements in technology, location queries have become more accessibleand convenient than ever before. From finding directions to discovering nearby restaurants, location-based serviceshave transformed the way we navigate and explore the world around us.Importance of Location Queries:The importance of location queries cannot be overstated. They enable us to gather relevant information about a place, such as its geographical features, climate, population, culture, and attractions. Whether we're planning a trip, researching for a project, or seeking local businesses, location queries provide us with valuable insights thathelp us make informed decisions.Tools and Technologies:Several tools and technologies are employed forlocation queries, each offering its unique features and functionalities. Among the most popular are:1. Global Positioning System (GPS): GPS allows users to determine their exact geographical location anywhere on Earth. It's widely used in navigation systems, mappingapplications, and location-based services.2. Online Maps: Platforms like Google Maps, Apple Maps, and MapQuest provide detailed maps, driving directions, and information about businesses, landmarks, and points of interest.3. Geographic Information Systems (GIS): GIS integrates hardware, software, and data to capture, manage, analyze, and present spatial and geographic information. It's used in urban planning, environmental management, and various other fields.4. Location-Based Services (LBS): LBS utilize the geographical location of a mobile device to deliver personalized information and services to users. Examples include location-based advertising, weather updates, and social networking check-ins.Impact on Society:Location queries have had a profound impact on variousaspects of society:1. Travel and Tourism: Location queries have revolutionized the way we plan and experience travel. From booking accommodations to discovering local attractions, travelers can access a wealth of information that enhances their journey.2. Business and Commerce: Location queries enable businesses to reach their target audience more effectively. Local search optimization helps businesses improve their visibility and attract customers in their vicinity.3. Emergency Services: In times of emergencies, accurate location information is critical for dispatching emergency services promptly. Location queries assist in quickly locating individuals in need of assistance, potentially saving lives.4. Urban Planning: Urban planners use location queries and GIS to analyze spatial data and make informed decisions about land use, infrastructure development, andenvironmental conservation.Conclusion:In conclusion, location queries have become an integral part of our daily lives, offering a plethora of benefits and opportunities. From enhancing travel experiences to facilitating business operations and improving emergency response, the impact of location queries is far-reaching and profound. As technology continues to evolve, we can expect further advancements in location-based services, enriching our understanding and exploration of the world around us.。
蔡司 kinevo 900 数字显微镜手册说明书

Advancing surgical certaintyKINEVO 900 – The Robotic Visualization System Just like you, we love challenging the status quo.The result? Over 100 innovations to perfect the already acclaimed surgical visualization platform. KINEVO® 900 from ZEISS is designedto deliver more functionalities than any surgical microscope today.ZEISS KINEVO 900 combines digital and optical visualization modalities, offers a unique Micro-Inspection Tool and will impress you with its Surgeon-Controlled Robotics. All to enable you to gain greater certainty in a virtually disruption-free workflow.Designed to meet real needs. To make a real difference!A lot more. And, a lot less too.When treating complex vascular conditions, you typically work at high magnification. Even the slightest vibrations can cause disruptions. And constant manual repositioning to better visualize structures or precisely approach deep-seated lesions can become extremely tedious. Not anymore! ZEISS KINEVO 900 delivers a lot more positioning precision with a lot less effort.PointLockSurgeon-Controlled Robotics adds a complete new level of ease to precise positioning. Imagine being able to focus and move around a structure to visualize the targeted anatomy – reducing any manual hassle. In addition, PointLock enables you to do a KeyHole movement to observe a larger area inside a cavity – a particular benefit in areas with narrow access. Simply put:Focus. Activate. Swivel.Active vibration dampingYou know the problems that can be created by the tiniest vibrations. The active damping provided by ZEISS KINEVO 900 minimizes collateral system vibrations, ensuring rock-solid stability. Enabling you to completely, and steadily, focus on what matters most: your treatment.Focus Activate Swivel5When you need it. Where you need it.The new navigation interface of ZEISS KINEVO 900 is designed to work in concert with your navigation device. When you require precise repositioning to reexamine previously visualized structures or when you need to align with a pre-mapped trajectory, making use of all six axes, the Robotic Visualization System ® delivers precise positioning at the push of a button. Putting you exactly where you need to be – when you need to be there.PositionMemoryWhen working on a tumor case, you may already have identified regions of concern where you want to protect the functional structure. After storing these in PositionMemory , you can come back and visualize them at the exact same magnification, working distance and focus – without losing time for manual repositioning. In a nutshell: Save. Move. Recall.Image-guided surgeryApproaching deep-seated pathologies in cranial surgery, such as aneurysms, brain stem and skull base tumors, is challenging. The Surgeon-Controlled Robotics of ZEISS KINEVO 900 enables automated positioning to pre-defined anatomical landmarks based on pre-operative data planning –right when you need it.Save Move Recall7New dimensions. Freedom of choice. Working through oculars at extreme angles can sometimes be a pain in the neck. Literally. With no way out, you might have to contend with uncomfortable working positions causing fatigue. Now, relief and revolutionary dimensions in visualization arein sight.The Digital Hybrid Visualization with integrated 4K technology of ZEISS KINEVO 900 welcomes you to a world of heads-up ocular-free surgery, giving you freedom of movement. And freedom of choice to use an optical setup, depending on the application need.Fully integrated 4K camera technologyDuring lateral lumbar or thoracic spine and posterior fossa approaches,ZEISS KINEVO 900’s integrated 4K visualization can be essential. It providesyou with multimodal visualization capabilities – the flexibility to decouple fromthe classic optical approach and to work with outstanding 4K picture qualityand clarity. Even when magnifying tiny details.What’s more … your assistant surgeon, OR staff and residents also benefit from the 4K visual clarity of ZEISS KINEVO 900. They share the same high-resolution, digital image to follow the procedure with comparable fidelity. Delivering indispensable education and training.9Critical challenge. Vital solution.Your challenge: When working from an external perspectiveof a surgical microscope, your visualization of the anatomy is limited to a straight line of sight – missing critical information behind tissue or corners. Efficient and effortless access to this comprehensive information is essential for treatment.Our solution: QEVO from ZEISSThe unique, proprietary Micro-Inspection Tool from ZEISS complements intraoperative microsurgical visualization, enabling you to discover unexplored areas during the surgical intervention without additional footprint. You can look around corners and eliminate blind spots. And most importantly, you can gain greater insights – for better clinical decisions.To support your surgical workflow, ZEISS QEVO is engineered with an angled design – keeping your hands out of the lineof sight during insertion in the surgical field. And, it allowsfor an easy fit between the ZEISS KINEVO 900 and the situs, eliminating the need to reposition the head of the device. Greater insights, on demand.ZEISS QEVO enables you to inspect the perforator or examine the distal neck of the aneurysm to ensure the clip blades are fully extended.11Ease of use. Peace of mind.Surgical certainty is your imperative. Enabling you to achieve it is ours. That’s why, in the development of the Micro-Inspection Tool, we placed a high priority on its ease of use.ZEISS QEVO is truly integrated. You don’t have to plan foran additional device during surgery. Just plug it into your ZEISS KINEVO 900 for a seamless surgical workflow and to easily switch back and forth between views.ZEISS QEVO is fully autoclavable.So there’s no need forany additional draping. This is another attribute that makes ZEISS QEVO an indispensable tool – always available during surgery. On demand.ZEISS QEVO. Innovation in action.With its ability to look around corners, ZEISS QEVO enables identification of possible tumor remnants – avoiding unnecessary bone removal and retraction. During a Vestibular Schwannoma case, for instance, it can help identify the course of facial nerves. And, can support inspection of regions that are not directly visualized by a surgical microscope.131 142ZEISS BLUE 4002multi-center study 1.ZEISS YELLOW 5602Real-time detection and visualization of malignant tissue during gliomasurgery using BLUE 400.Visualization of fluorescence-stained structures while performing left-temporal craniotomy for tumor resection using YELLOW 560. Obtained within the scopeof a clinical investigation.For a complete picture: The Diagram Functionoutlines assessment of fluorescence intensityvariation over time and fast access to the keyindicators for further analysis.BeforeFor no compromises:After For the fluorescence distribution: The Intensity Map enables you to conveniently identify relative fluorescence levels reached during the INFRARED 800 observation period.For the speed of the flow: The Speed Map indicates how fast the fluorescence intensity increased during the observation period – indicating the speed of the blood flow.For the indicative time: The Delay Map (orSummary Map) provides quick information aboutthe time when the fluorescent signal appeared foreach image point in the map.15Setting new benchmarks. Shaping a new future. When we envisioned the all-new Robotic Visualization System,we conceived a design that can deliver so much more withoutlosing its familiarity. With ZEISS KINEVO 900, we continue tolive our vision of supporting you in becoming one with yourvisualization system – of delivering purposeful innovations.ones that matter the most for you.The Robotic Visualization System: The first of its kind.Surgeon-Controlled RoboticsDelivering precise positioning with a lotless effort – with motors in all axes.ZEISS QEVO – The Micro-Inspection ToolComplementing intraoperative microsurgicalvisualization to discover unexplored areasduring surgical intervention. Gain greaterinsight. On demand.16Digital Hybrid VisualizationProviding an opportunity for ocular-free surgery, with the freedom to use a traditional optical setup – depending on the application need.Integrated Intraoperative Fluorescence –The Power of Four.The redesigned intraoperative fluorescence technologies from ZEISS offer you the Power of Four – so you always have the tools you need.17Neurosurgery, in particular, is a technologically intensivesurgical discipline. This has pushed us toward the edge oftransformation: to develop leading digital technologiesenabling you to expand the boundaries of surgical care –to the next level.ZEISS KINEVO 900 offers full digital connectivity.Manage surgical data wherever you are: ZEISS Connect App 1enables you to access your surgical data from your iOS device,and also delivers dedicated functionalities for efficient work-flows.Take teaching to new heights: ZEISS Observe App enablesyou to virtually broadcast your procedure in the OR. Yourstudents can follow the live surgery directly on mobile screensor immerse themselves in a rich VR Experience.Gain value with new digital services: ZEISS Smart Servicesenables faster support for you and your team with remoteconnectivity. Benefit from the increased system availabilitypowered by a secure connection to your ZEISS KINEVO 900.Digital connectivity. Transforming OR’s.ZEISS ConnectZEISS Observe1 Available soon18Connecting simplicity and innovation.ZEISS SMARTDRAPEYour visualization needs are paramount to us. And, soare the needs of your team. That’s why we gave a specialfocus to the OR preparation process in the developmentof ZEISS KINEVO 900.Being an integral part of the optical path, the SMARTDRAPEwith VisionGuard® from ZEISS is designed together withZEISS KINEVO 900 so you and your team can have thebenefits of a vivid view, and effective patient protection.At the same time – the new innovations make the drapingprocess simply simple!• Innovative folding: to eliminate guesswork and complexity.• Intuitive attachment: for an effortless and simple self-locking mechanism.• Integrated RFID chip: for easy activation of AutoDrape®.Designed for ZEISS KINEVO 900.Support whenever you need it.ZEISS OPTIMEIf you rely on high system availability, consider our ZEISSOPTIME service agreements, which are designed to ensurethe readiness of our medical equipment when you need it.ZEISS OPTIME service agreements for ZEISS KINEVO 900now come with connectivity for ZEISS Smart Services.195°A x i s 6-25° / +135°A x i s 4±45°A x i s 5-28° / +20°A x i s 3n x 360°A x i s 1M o n i t o r R o t a t i o n : ±125°T i l t i n g : -20° / +5° (±3°)c a . 530 - 1635 mm820 m mca.665m m- 1760 m m Technical DataKINEVO ® 900 from ZEISS Technical DataRated Voltage 100 V – 240 VCurrent Consumption Max. 1.350 VARated Frequency 50 Hz – 60 HzElectrical Standard Complying with IEC 60601 1:2005+A1:2012Protection class I, degree of protection IP20Class 2 laser product as perapprox. 525 kg20Cable length: 5 mQEVO ® from ZEISS and QEVO ECUTechnical Data Direction of View 45° upwards Shaft Diameter 3.6 mm Shaft Length 120.0 ± 1.0 mm Total Diameter 13.0 mmField of View 100° ± 5° wide angle view Illumination20 – 35 lumen LED Weight (without cable)250 g Sterilization AutoclavableImage Resolution 1920 x 1080 pixel full HD Length of Cable5000 mmOperation Temperature +10 to +40 °C (500/1000 s intermittent use)QEVO ECU Dimensions Length = 265.0 ± 1 mm, height = 59.3 ± 1 mm and depth = 212.2 ± 1 mm Weight2.5 kgOperating Voltage 24V (+/- 10%) ADC Video OutputDVI-D full HD21Technical DataOptions VideoStereo video camera 3D HD, fully integrated, 2 x 3-chip HD, 1080p incl. 2nd HD 3D monitor 4K video camera, fully integrated 3-chip 4K, 2160p Stereo video camera 4K 3D, fully integrated, 2 x 3-chip 4K, 2160p, incl. 2nd HD 3D monitor Integrated HD video recording, withSmartRecording, low-Resolution recording, editing and streaming 2nd system monitor HD 2DAttachment for consumer (SLR) photo camera External 55" 4K 3D video monitor, with mobile cartIntraoperative FluorescenceBLUE 400INFRARED 800INFRARED 800 Compact INFRARED 800 with FLOW 800YELLOW 560Connectivity / Data Manage- mentDICOM module for image and video data transfer from / to PACS. Patient management by modality worklist management.Shared Network Data storage WLAN option, with WiFi Hotspot Navigation Interface Standard Navigation Interface ExtendedAccessoriesZEISS QEVO and QEVO ECU12.5x magnetic wide field eyepieces with integrated eyecups Stereo co-observation tubeFoldable Tube f170 / f260, including the PROMAG function for additional 50 % magnification and integrated rotate functionTiltable binocular tube, swivel range 180°, focal length f = 170 mm14-function, wired foot control panel 14-function, wireless foot control panel 2-function foot switch Mouth switch3-step magnification changerStandard Configuration Apochromatic OpticsMotorized focus; Varioskop ® with working distance 200 – 625 mmMotorized zoom; zoom ratio 1:6, magnification factor y = 0.4x – 2.4x10x magnetic wide field eyepieces with integrated eyecupsAutoFokus with 2 visible laser dots, automatic mode with magnetic brakesIllumination2 x 300 W Xenon, with automatic lamp exchange Automatic Iris Control for adjusting the illumination to the field of view Individual light threshold settingFocus Light Link: working distance controlled light intensityManual adjustment of diameter of field of illuminationAdditional illumination beam to brighten up shadows, motorizedSystem OperationMultifunctional programmable handgrips Magnetic clutches for all system axes Central user interface with full-screen video XY robotic movement in 6 axes (variable speed)Active dampingManual and motorized PointLock function with variable speed PositionMemoryMotorized XY lateral movement with variable speedMultiVision System (HD), with shutter controlSystem SetupAutoBalanceAutoDrape – air evacuation system 1Park Position Drape PositionVideoIntegrated 3-chip Full HD video camera, 1080p 24" HD video touchscreen on extendable arm, 16:9 aspect ratioIntegrated still image capturing both on HDD and USB-mediaConnectivity / Data Manage- ment Video-in for external HD video sources Remote diagnosis via internet / VPN Sterile DrapeZEISS SMARTDRAPE1Available with ZEISS SMARTDRAPE only.22Your needs. Our packages.Select a ZEISS KINEVO 900 built to fit your typical clinical use-cases. ZEISS KINEVO 900 comes with pre-defined packages giving you a head start in planning the most suitable configuration for your specific needs.Interested in digital visualization? Check out the digital package. That’s our commitment to cover you for tomorrow while keeping your present needs into focus.always included always included as INFRARED 800 only optional23E N _30_010_0023V I P r i n t e d i n G e r m a n y . C Z -I V /2019T h e c o n t e n t s o f t h e b r o c h u r e m a y d i f f e r f r o m t h e c u r r e n t s t a t u s o f a p p r o v a l o f t h e p r o d u c t o r s e r v i c e o f f e r i n g i n y o u r c o u n t r y . P l e a s e c o n t a c t o u r r e g i o n a l r e p r e s e n t a t i v e s f o r m o r e i n f o r m a t i o n . S u b j e c t t o c h a n g e s i n d e s i g n a n d s c o p e o f d e l i v e r y a n d d u e t o o n g o i n g t e c h n i c a l d e v e l o p m e n t . R o b o t i c V i s u a l i z a t i o n S y s t e m , K I N E V O , Q E V O ,F L O W , A u t o D r a p e , V a r i o s k o p , S M A R T D R A P E a n d V i s i o nG u a r d a r e e i t h e r t r a d e m a r k s o r r e g i s t e r e d t r a d e m a r k s o f C a r l Z e i s s M e d i t e c A G .© C a r l Z e i s s M e d i t e c A G , 2019. A l l r i g h t s r e s e r v e d .Carl Zeiss Meditec AG Goeschwitzer Strasse 51–52 07745 Jena Germany/med /kinevoKINEVO 900QEVO ECU BLUE 400YELLOW 5600297QEVOINFRARED 800 with FLOW 800 Option SMARTDRAPEView of the cerebellar tonsils and medulla. Image courtesy of Dr. Robert F. Spetzler, Barrow Neurological Institute, Phoenix, Arizona, USA. (Cover page)View onto cerebellum and lower cranial nerves. Image courtesy of Dr. Robert F. Spetzler, Barrow Neurological Institute, Phoenix, Arizona, USA. (Page 2) Front temporal area for STA-MCA bypass procedure. Image courtesy of Dr. Peter Nakaji, Barrow Neurological Institute, Phoenix, Arizona, USA (Page 2)View onto optic nerve and internal carotid artery. Image courtesy of Dr. Peter Nakaji, Barrow Neurological Institute, Phoenix, Arizona, USA (Page 4)Image-guided surgery. Image courtesy of BrainLab AG (Page 6 and 7)View onto spinal cord dura. Image courtesy of Dr. Robert F. Spetzler, Barrow Neurological Institute, Phoenix, Arizona, USA (Page 8 and 9)Small view of the cerebellum through the Retrosigmoid Approach. Image courtesy of Dr. Peter Nakaji, Barrow Neurological Institute, Phoenix, Arizona, USA (Page 10)Left mini-pterional approach for clipping an aneurysm. Image courtesy of Dr. Peter Nakaji, Barrow Neurological Institute, Phoenix, Arizona, USA (page 11)View onto corpus callosum and septum pellucidum. Image courtesy of Dr. Peter Nakaji, Barrow Neurological Institute, Phoenix, Arizona, USA (Page 12)Transnasal transspenoidal for re-exploration and excision of recurrent pituitary Macroadenoma with possible abdominal fat. Image courtesy of Dr. William White, Barrow Neurological Institute, Phoenix, Arizona, USA (Page 13)Right temporal Craniotomy for AVM. Image courtesy of Dr. Robert F. Spetzler, Barrow Neurological Institute, Phoenix, Arizona, USA (Page 14 and 15)Glioma surgery using BLUE 400. Image courtesy of Prof. Dr. Walter Stummer, University Clinic, Münster, Germany (Page 15)Left-temporal craniotomy for tumor resection with YELLOW 560. Image Courtesy of Dr. Peter Nakaji, Barrow Neurological Institute, Phoenix, Arizona, USA. (Page 15)。
LandMark问题集锦

Landmark软件的特点:Landmark软件主要有两部分组成:OpenWorks软件平台和各个应用程序。
应用程序都OpenWorks 的插件,均运行于OpenWorks的环境下,受它的管理,遵循其设置的规则和标准。
例如,所有应用程序的数据测量系统,投影和坐标系统等都与OpenWorks软件平台的设置一致,这样有利于数据的交换。
所有应用程序产生的各类数据包括地质、地震、测井、人文四大类数据,均存储于OpenWorks数据库中,形成了一个统一的数据体,即所谓的数据一体化,总体说来,主要有下列三个特点:方便的数据交换:各个应用程序之间都可以很方便地进行数据交换,SeisWorks和StratWorks中的断层多边形、层面网格线、等值线等可以方便地相互交换,MapView的图像也可以转成ZMAP+格式,输出高质量的图像。
数据共享:OpenWorks是一个多用户系统,允许多个用户在一个工区内工作,你可以指定用哪些用户的数据,并可指定应用的次序,达到数据全面的共享。
便利的数据通讯:通讯就是实时的数据交换。
Landmark软件各个应用程序之间以及每个应用程序内部都存在广泛的通讯。
另外,Landmark软件还具有多平台系统的特点,软件可以运行在SUN、SGI、IBM三种工作站上。
应用PetroWorks的软件开发工具包(ModelBuilder),用户可以开发自己的应用程序,增强软件的功能。
OpenWorks有浮动许可的功能,因此网上的任意一台工作站都可通过许可证浮动的方式运行软件。
OpenWorks软件平台所挂接的应用程序很多,其中包括单井处理软件(PetroWorks)和多井处理软件(StratWorks)。
怎样在同一个系统中同时起两个OpenWorks 菜单用同一个用户,在不同的unix 窗口中,使用下面命令:startow -i $$可启动两个OpenWorks 菜单,分别调用不同的井工区,用不同的解释员,作不同的作业。
LANDMARK-ASSISTED NAVIGATION

专利名称:LANDMARK-ASSISTED NAVIGATION发明人:ALBERTSON, Jeffrey,WILLIAMS, Natalie, O'Connell,JOHN, John, Payyappillil,BISHOP,Amanda,THORSEN, Justin, Joseph,LU, Jiexi 申请号:US2017/064690申请日:20171205公开号:WO2019/112564A1公开日:20190613专利内容由知识产权出版社提供专利附图:摘要:A computer-implemented method for providing landmark-assisted navigation guidance by selectively utilizing database information includes receiving navigationrequests from one or more mobile computing devices, each of the requests being associated with a respective starting point, destination, and travel mode. For each navigation request, a corresponding route to be depicted in a corresponding digital map is determined. For each navigation request associated with a first travel mode, corresponding points of interest (POIs) are determined from among a plurality of POIs stored in a database. The corresponding POIs are determined based on at least a zoom level of the corresponding map and whether the corresponding POIs are associated with any landmark category. For each navigation request associated with a second travel mode, corresponding POIs are determined based on at least a zoom level of the corresponding map, but irrespective of whether the corresponding POIs are associated with any landmark categories.申请人:GOOGLE LLC地址:1600 Amphitheatre Parkway Mountain View, CA 94043 US国籍:US代理人:BATEMAN, Andrew, W. et al.更多信息请下载全文后查看。
从机场到我家的路线英语作文100字
从机场到我家的路线英语作文(5篇)1When you arrive at the airport and want to reach my home, here is the detailed route for you. You can choose either public transportation or taxi. Let's start with the subway option. From the airport, you can take Metro Line 3. After several stops, transfer to Metro Line 5 at the Central Station. This transfer station is quite busy but well-signposted. As you continue on Metro Line 5, you'll pass by a huge shopping mall, which is a famous landmark in our city. Get off at the Park Avenue Station, and my home is just a short walk away.If you prefer to take a taxi, the driver will drive along the Main Street. On this route, you'll see a historical museum on your left. It has a beautiful architecture and showcases many precious cultural relics. The taxi will then turn right onto Green Road and keep going straight until it reaches a large park. My home is located near the park.Another possible way is by bus. Take the Airport Express Bus and get off at the City Square. From there, you need to walk for about ten minutes and you'll reach my neighborhood.Whichever transportation you choose, I'm sure you'll enjoy the journey and have a pleasant experience. The route is not only convenient but also allows you to catch glimpses of the city's attractions and uniquescenery. Welcome to my home!2When you arrive at the airport and are eager to reach my home, here are several convenient and distinctive routes for you.If you prefer public transportation, taking the bus is a great choice. The bus route is not only economical but also offers you the opportunity to enjoy the beautiful scenery along the way. You can observe the changing landscapes and local life as the bus winds through the city. The buses are well-connected and have frequent services, making it a reliable option.Another option is to take a taxi. Taxis provide a direct and comfortable journey. You don't have to worry about transfers or waiting for connections. The drivers are usually familiar with the local roads and can get you to your destination in the shortest time possible.For those who enjoy more independence and flexibility, driving your own car or renting one is an excellent choice. You can set your own pace and stop whenever you want to take a break or explore something interesting. It gives you the freedom to change your plans as you wish.If you are in a hurry and want to reach my home quickly, you can consider taking the subway. The subway system is efficient and avoids traffic congestion on the roads.No matter which route you choose, each has its own unique features and advantages. I'm sure you'll have a pleasant journey from the airport tomy home.3When you land at the airport and embark on the journey to my home, it's like setting foot on an exciting adventure. As you exit the airport, you'll find yourself on a wide boulevard flanked by tall palm trees that seem to wave hello and guide your way.You then turn onto a busy street where cars rush by like a rapid river. The traffic lights here are like guardians, regulating the flow of this urban current. Keep going straight until you see a large shopping mall on your right. It stands out like a huge treasure chest, filled with all kinds of wonders.Next, you'll pass by a beautiful park. The green grass and colorful flowers are like a vibrant painting, offering a moment of tranquility in the midst of the bustling city. The winding paths within the park are like secret trails leading you deeper into a world of peace.After that, you'll reach a bridge that spans across a river. The water below flows gently, reflecting the sunlight and creating a shimmering spectacle. The bridge itself is like a connection between two different worlds, carrying you towards your destination.Finally, you'll turn into a quiet neighborhood and spot my house, nestled among the trees. It's like a haven of warmth and comfort, waiting to welcome you with open arms. This is the route from the airport to myhome, a journey full of surprises and delights.4When it comes to the route from the airport to my home, a well-planned itinerary is essential, considering both the traffic conditions and the time factor.First and foremost, if you arrive at the airport during peak hours, it is advisable to avoid the main thoroughfares that are prone to heavy congestion. For instance, instead of taking the busy highway that connects directly to the city center, you could opt for the secondary roads that wind through the suburbs. These roads may have less traffic, although they might add a few extra minutes to your journey.Another option is to choose different transportation modes depending on the time of your arrival. If it's early in the morning or late at night, when traffic is relatively light, a taxi could be a convenient choice as it offers a direct and swift journey. However, if you arrive during the midday or afternoon when traffic builds up, public transportation such as the metro or buses might be a better option. They follow dedicated lanes and are less likely to be stuck in traffic jams.In addition, it's worth noting that using navigation apps on your mobile phone can provide real-time traffic updates and suggest alternative routes based on the current situation. This can be extremely helpful in ensuring a smooth and efficient journey.Overall, the key to a successful journey from the airport to my home lies in careful planning and flexibility in choosing the right route and transportation mode based on the specific time and traffic conditions.5When it comes to the route from the airport to my home, it is a topic that demands a meticulous and strategic analysis. To ensure an efficient and pleasant journey, several crucial factors need to be taken into consideration.First and foremost, the application of Geographic Information System (GIS) proves to be highly beneficial. By inputting the starting point at the airport and the destination of my home, GIS can generate multiple potential routes. It takes into account various elements such as road conditions, traffic flow, and construction works. This helps us identify the most suitable path that minimizes travel time and potential delays.In addition, referring to theories related to traffic planning is also of great significance. For instance, understanding peak traffic hours and avoiding major thoroughfares during those times can significantly enhance the efficiency of the journey. Also, considering alternative routes that bypass congested areas or those with ongoing road maintenance can make a substantial difference.Another aspect to consider is the mode of transportation. If one opts for public transportation, such as the metro or buses, understanding theschedules and transfer points is essential. On the other hand, if driving a private vehicle, having knowledge of parking facilities along the route becomes crucial.Furthermore, real-time traffic updates and navigation apps play a vital role. They can provide immediate information on unexpected traffic incidents or changes in road conditions, allowing for on-the-fly adjustments to the chosen route.In conclusion, determining the route from the airport to my home requires a comprehensive consideration of multiple factors, including the utilization of advanced technologies and theoretical knowledge in the field of transportation planning. Only by doing so can we ensure a smooth and hassle-free journey.。
各国道路命名方法

各国道路命名方法Every country has its own unique way of naming roads, which often reflects its history, culture, and geography. 对于每个国家来说,道路的命名方式往往反映了它的历史、文化和地理特点。
In the United States, roads are typically named based on a grid system, with numbers and letters used to designate various routes. 在美国,道路通常是根据网格系统命名的,数字和字母用来指定不同的路线。
For example, Interstate highways are assigned numbers such as I-95 or I-10, while local roads may have names that reference local landmarks or historical figures. 例如,州际高速公路被分配了如I-95或I-10的编号,而当地的道路可能有参考当地地标或历史人物的名字。
However, in countries like India, roads may be named after important figures or events in the country's history, such as Mahatma Gandhi Road or Independence Day Road. 然而,在印度等国家,道路可能以国家历史上重要的人物或事件命名,比如圣雄甘地路或独立日路。
In many European countries, roads are often named after cities, towns, or landmarks that they connect. 在许多欧洲国家,道路往往以它们连接的城市、城镇或地标命名。
写一篇家附近位置地图的英语作文

写一篇家附近位置地图的英语作文全文共3篇示例,供读者参考篇1A map is an essential tool for navigation, helping us find our way around unfamiliar places. In this essay, I will be describing a map of my local area, highlighting key locations and landmarks.The map of my local area is divided into several sections, each representing a different neighborhood or district. Starting from the top left corner, there is the residential area where I live. It is a quiet and peaceful neighborhood, with rows of houses lining the streets. In the center of this area, there is a park with a playground and a small lake, perfect for leisurely walks or picnics.Moving to the right, there is a commercial district with shops, restaurants, and cafes. This is where I usually go to run errands or meet up with friends. One of the main streets in this area is lined with boutique stores and trendy cafes, making it a popular spot for shopping and dining.Next to the commercial district is a school, where students from the surrounding neighborhoods attend classes. It is a large and modern building, with sports fields and a playground foroutdoor activities. The school is a hub of activity during the day, with students bustling in and out of the classrooms.Further down the map, there is a hospital, which provides medical care to the residents of the area. It is a large facility with several departments, including a emergency room, surgery wing, and maternity ward. The hospital is an important resource for the community, offering healthcare services to those in need.On the bottom right corner of the map, there is a park with a community center. The park has walking trails, a basketball court, and a playground for children. The community center hosts various events and programs for residents, such as fitness classes, workshops, and community gatherings.Overall, the map of my local area is a diverse and vibrant representation of the community. It showcases the different facets of life in the neighborhood, from residential areas to commercial districts to recreational spaces. With its variety of locations and landmarks, the map serves as a valuable guide for residents and visitors alike.篇2A Map of My NeighborhoodIntroductionI live in a bustling neighborhood with a mix of residential areas, shopping districts, and green spaces. In this essay, I will take you on a virtual tour of my neighborhood through a detailed map that shows the various landmarks, streets, and buildings in the area.Residential AreasThe northwestern part of my neighborhood is primarily residential, with rows of single-family homes and apartment buildings. The streets are lined with trees, and there are several parks and playgrounds scattered throughout the area. The houses range in style from modern townhouses to traditional Victorian mansions, giving the neighborhood a diverse and charming feel.Shopping DistrictsIn the center of the neighborhood is a bustling shopping district with a wide variety of stores, restaurants, and cafes. The main street is lined with shops selling everything from clothing and jewelry to books and electronics. There are also several grocery stores, pharmacies, and banks in the area, making it convenient for residents to run errands and grab a quick bite to eat.Green SpacesTo the east of the shopping district is a large park with walking trails, picnic areas, and sports fields. The park is a popular gathering spot for residents of all ages, who come to enjoy the fresh air, exercise, and socialize with friends and neighbors. In the center of the park is a playground for children, complete with swings, slides, and climbing structures.LandmarksOne of the most prominent landmarks in my neighborhood is the historic town hall, located at the corner of Main Street and Elm Avenue. The town hall is a beautiful old building with a clock tower and a bell that rings on the hour. It serves as a focal point for community events and meetings, and is a source of pride for residents who value its historic significance.Another notable landmark in the neighborhood is the local library, which is located just a few blocks away from the town hall. The library is a hub of activity, with residents coming to borrow books, attend programs and events, and use the public computers. It also has a cozy reading room and a children's section, making it a popular destination for families.ConclusionIn conclusion, my neighborhood is a vibrant and diverse community with a mix of residential areas, shopping districts, green spaces, and landmarks. I hope this map has given you a sense of the layout and character of the area, and that you have enjoyed this virtual tour of my neighborhood. Thank you for joining me on this journey!篇3Map of the NeighborhoodIntroductionLiving in a neighborhood with a detailed map can be very helpful. It not only helps you navigate your way around, but it also allows you to identify important places and landmarks in the area. In this essay, I will provide a detailed description of the map of my neighborhood, highlighting key places of interest and their significance.Description of the MapThe map of my neighborhood is divided into several sections, each representing a different area within the vicinity. The map is color-coded, with different colors representing different types of locations. For example, green indicates parks and recreational areas, blue indicates bodies of water, yellow indicates schoolsand educational institutions, and red indicates shopping centers and commercial areas.Key LocationsOne of the key locations on the map is the community park, located in the center of the neighborhood. The park is a popular gathering spot for residents, with playgrounds, picnic areas, and walking trails. It also hosts various community events throughout the year, such as concerts and holiday celebrations.Another important location on the map is the elementary school, located on the western side of the neighborhood. The school is a hub of activity, with students coming and going throughout the day. It also serves as a polling place during elections, making it an important civic location for the community.There are also several shopping centers and restaurants marked on the map, located along the main roads that run through the neighborhood. These commercial areas provide residents with convenient access to groceries, clothing, and dining options.ConclusionHaving a detailed map of my neighborhood is invaluable for both residents and visitors. It helps us navigate the area more efficiently and allows us to appreciate the various amenities and attractions that make our neighborhood unique. By highlighting key locations and their significance, the map serves as a valuable guide for exploring and enjoying all that our neighborhood has to offer.。
介绍街道方向英语作文

介绍街道方向英语作文Street Directions: Navigating the Urban Maze。
In the bustling urban landscapes around the world, streets serve as the arteries of connectivity, guiding the flow of people and vehicles towards their destinations. Understanding street directions is not only essential for travelers but also for locals navigating their daily routines. Let's delve into the intricacies of street directions and how they facilitate movement in the urban maze.First and foremost, streets are typically oriented along cardinal directions: north, south, east, and west. This cardinal orientation forms the basis of street navigation in many cities. For instance, in cities like New York or London, streets often run either north-south or east-west, creating a grid-like pattern that simplifies navigation.However, not all streets adhere strictly to cardinal directions. In older cities with historical layouts,streets might twist and turn, following the contours of the land or reflecting the organic growth of the city over time. In such cases, landmarks, signage, and local knowledge become crucial for navigating the labyrinthine streets.In addition to cardinal directions, streets are often categorized based on their functions and importance. Main thoroughfares, such as boulevards or avenues, are typically wider and accommodate heavier traffic flow. They often connect major landmarks, neighborhoods, or business districts. In contrast, side streets or alleys are narrower and quieter, serving primarily as access routes to residential areas or local establishments.Navigating street directions also involvesunderstanding the numbering or naming conventions employedin different cities. In some cities, streets are numbered sequentially, with odd numbers typically on one side and even numbers on the other. This system helps in determining the relative location of addresses along a particularstreet. Meanwhile, other cities may use a combination of numbers and names for streets, with names often reflecting historical figures, geographical features, or local landmarks.Moreover, street signage plays a crucial role inguiding travelers along their routes. Clear and informative signage provides essential information such as street names, directions to nearby landmarks, and distances to key destinations. Multilingual signage is particularly helpfulin diverse urban environments, catering to the needs ofboth locals and visitors from different linguistic backgrounds.In recent years, technological advancements have revolutionized street navigation through the widespread adoption of GPS-enabled devices and smartphone apps. Platforms like Google Maps or Waze offer real-time navigation assistance, helping users navigate streets with turn-by-turn directions, traffic updates, and alternate routes. These digital tools have significantly simplified the process of navigating unfamiliar streets, reducingreliance on traditional paper maps and physical signage.Furthermore, urban planning initiatives often aim to enhance street navigation by improving infrastructure, optimizing traffic flow, and enhancing pedestrian accessibility. Initiatives such as pedestrian-friendly streetscapes, bike lanes, and wayfinding signage contribute to creating more inclusive and navigable urban environments for all residents and visitors.In conclusion, understanding street directions is essential for navigating the intricate urban landscapes of cities worldwide. Whether it's following cardinal directions, recognizing landmark-based navigation cues, or leveraging technological aids, mastering street navigation empowers individuals to traverse the urban maze with confidence and ease. By embracing the diversity of street layouts and navigation methods, we can unlock the full potential of cities as vibrant hubs of connectivity and exploration.。
托福听力tpo58 lecture1、2、3 原文+题目+答案+译文

托福听力tpo58lecture1、2、3原文+题目+答案+译文Lecture1 (1)原文 (1)题目 (4)答案 (6)译文 (6)Lecture2 (8)原文 (8)题目 (10)答案 (12)译文 (12)Lecture3 (14)原文 (14)题目 (16)答案 (18)译文 (19)Lecture1原文NARRATOR:Listen to part of a lecture in a biology class.FEMALE PROFESSOR:So,those are some of the common theories on bird migration. Now let’s talk about“homing.”Homing is more than just the return flight home from migratory trips—homing can take place at any time and from any location.It’s the ability that some birds have of finding their way back to an exact location regardless of their starting point…or how far away they are…or the time of year…and so on. You’ve all heard of homing pigeons but there are lots of bird species that have highlyrefined homing skills so maybe there’s some evolutionary advantage.Why would birds be so good at this?Todd?MALE STUDENT:Well,baby birds stay in the nest while the parents go out and hunt for food.If the parents have to fly all over the place to find the food,they’d need to be able to find the nest again.FEMALE PROFESSOR:And once you’d found food you’d want to get home quickly, wouldn’t you?To feed your young?So you’d want the most direct path home—you wouldn’t want to retrace whatever winding,meandering path you’d taken while you were searching for food.Being able to fly home directly is very efficient:the offspring get food faster and their parents are home sooner to look out for them.MALE STUDENT:But,it isn’t just the offspring that benefit—the adult birds get back to a safe place sooner as well.FEMALE PROFESSOR:Right.Now,what about finding your way home after going south for the winter?FEMALE STUDENT:Well,it’d be nice if you could go back to a place you knew was OK. Ya’know,one that’s got water or food…Not too many predators.Some place where you might even still have a nest.FEMALE PROFESSOR:Good.Now,so far,we’ve been talking about times when birds intentionally—or,at least instinctively—leave home,but are there other reasons why a bird might find itself away from its nest?FEMALE STUDENT:Birds are vulnerable to really strong winds.Storms could blow them pretty far off course.FEMALE PROFESSOR:But finding your way back to your nest when you’ve been accidentally displaced is a little different from getting home after your annual migration to a warmer climate.So,do you think all those mechanisms we discussed…that birds use when migrating…apply to homing as well?FEMALE STUDENT:I think so.I mean we talked about using the Sun and the stars asnavigational guides—and that would certainly be helpful for homing.And so would that ability to sense Earth’s magnetic poles—the one in the studies you described about the,uh,internal magnetic compass birds have.Yeah,it should be the same.FEMALE PROFESSOR:OK,so celestial bodies make good navigational aids.Anything else?MALE STUDENT:Well,for short distances,you could just memorize the e landmarks.Like,when my friend tells me to turn left after I see the post office to get to his house.FEMALE PROFESSOR:So,when birds are out searching for food,they can memorize landmarks.Mountains,rivers…who knows,maybe even the post office.Studies of gannets have shown that this is one way they navigate.Gannets are seabirds so when they wind up in an unfamiliar location over land,they fly in outward spirals until they reach the coast.Then they use the coastline to find their way home.Of course,when we say that birds“memorize”their terrain—that may not be accurate.It’s not always a good idea to use human analogies when trying to understand animal behavior—particularly when it comes to navigation which we,as a species,are spectacularly bad at.I mean,even with maps,how often do we get lost? But,with birds,they’re actually overengineered to be good at navigation.Just think about all those tools we’ve discussed—celestial bodies,magnetic fields, landmarks—they’ve got a lot of sensory cues at their disposal.But how do they use them?For example:do birds use one navigational cue at a time…Like being guided by stars when the sky is clear and using magnetic fields when it’s cloudy?Or,do they use all these tools simultaneously—calibrating their location from multiple cues at the same time?Does the answer depend on the particular species?This is a really rich subject for research…In fact,let’s talk about how you might go about designing some experiments to answer these questions.Keeping in mind,as I said,that your personal experiences won’t be of much use as you try to come up with hypotheses to test.题目1.What does the professor mainly discuss in the lecture?[Click on2answers.]A.Some ways birds benefit by having homing abilitiesB.Several ways that birds improve their homing abilitiesC.Some navigational tools that birds use in migration and homingD.Several research studies that measure migration and homing abilities in birds2.According to the professor,what are three ways in which homing behavior is different from migration behavior in birds?[Click on3answers.]A.Homing is not a seasonal activity.B.Homing does not always involve long distances.C.Homing behavior is learned rather than instinctive.D.Homing abilities allow birds to deal with unexpected situations.E.Homing requires the use of different navigational tools than does migration.3.According to the professor,birds often take a different route when they leave the nest to hunt for food than they do when they return to the nest.What is one reason for this behavior?A.Birds use the return flight to teach their young homing skills.B.Birds want to complete the return trip as quickly as possible.C.By taking different routes,birds have access to more food sources.D.By taking different routes,birds avoid predators that may try to follow them.4.Why does the professor mention a study with gannets?A.To identify a bird species that does not migrate long distancesB.To explain that some birds fly in spiral patterns until they locate food sourcesC.To illustrate differences in behavior between coastal and mountain bird speciesD.To demonstrate that some birds use distinctive features of the landscape as a navigation tool5.What does the professor imply about the design of research experiments that the students might conduct on bird navigation?A.Well-designed research studies help to explain human as well as bird navigational abilities.B.Past research studies were mistakenly designed to study only one navigational skill at a time.C.Students need to be careful to avoid designing experiments that are based on faulty assumptions.D.Students should try to design experiments that challenge traditional theories about birds’navigational abilities.6.Why does the student say this?FEMALE STUDENT:I think so.I mean we talked about using the Sun and the stars as navigational guides—and that would certainly be helpful for homing.And so would that ability to sense Earth’s magnetic poles—the one in the studies you described about the,uh,internal magnetic compass birds have.Yeah,it should be the same.A.To establish a connection between two scientific studiesB.To point out that the professor mentioned these details in a previous classC.To indicate she is confident that her initial response was correctD.To show that she agrees with the professor’s interpretation of a theory答案AC ABD B D C C译文旁白:在生物课上听一节课的部分内容。
英语作文那里有河流那里就有城市

英语作文那里有河流那里就有城市Where There Are Rivers, There Are Cities。
Rivers have played a significant role in the development of human civilization throughout history. They have not only provided a source of water for drinking and irrigation but also served as transportation routes for trade and commerce. It is often said that where there are rivers, there are cities. This statement holds true as rivers have been the lifelines of many cities around the world. In this article, we will explore the relationship between rivers and cities and how they have shaped each other.Firstly, rivers have always been attractive locations for human settlement due to their abundant water supply. Water is essential for human survival, and rivers offer a continuous source of fresh water. This has allowed civilizations to flourish along riverbanks, as seen in ancient cities like Mesopotamia, Egypt, and the Indus Valley. The availability of water for drinking, agriculture, and industrial purposes has been crucial in the growth and sustenance of these cities.Moreover, rivers have served as natural transportation networks, facilitating trade and communication between different regions. Historically, rivers have been the primary means of transporting goods and people over long distances. Cities located along major rivers have benefited from this connectivity, becoming centers of trade and commerce. For example, the ancient city of Rome was strategically built along the Tiber River, which provided easy access to the Mediterranean Sea and facilitated trade with other parts of the Roman Empire.In addition to water supply and transportation, rivers have also influenced the physical layout and architecture of cities. Many cities have been built around river bends or at the confluence of multiple rivers, taking advantage of the natural features for defense and navigation. The winding canals of Venice, for instance, were originally designed to serve as a defense mechanism against invasions while also providing efficient transportation within the city. The riverfronts of cities like Paris and London have become iconic landmarks, attracting tourists and serving as recreational spaces for locals.Furthermore, rivers have played a crucial role in the economic development of cities. They have provided a source of energy through watermills and hydroelectric power plants, driving industrialization and urbanization. The textile mills of Manchester in the United Kingdom, for instance, were powered by the River Irwell, which contributed to the city's rapid growth during the Industrial Revolution. Even today, many cities rely on rivers for hydropower generation, supporting their economic activities.However, the relationship between rivers and cities is not without challenges. Flooding is a common natural disaster associated with rivers, and cities located in flood-prone areas are particularly vulnerable. Over the years, cities have developed various strategies to manage and mitigate the risks of flooding, such as building levees, flood control channels, and reservoirs. These measures have helped protect cities from the destructive forces of rivers but have also altered the natural flow and ecology of the waterways.In conclusion, rivers have been instrumental in the development of cities worldwide. They have provided water, transportation, and energy, shaping the growth and prosperity of urban centers. The relationship between rivers and cities is a symbiotic one, with cities relying on rivers for their sustenance while rivers benefit from the economic activities and human settlements that cities bring. As we continue to build and develop our cities, it is essential to recognize the importance of rivers and strive for a harmonious coexistence with these vital natural resources.。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Carl Owen and Ulrich Nehmzow
University of Manchester Department of Computer Science Manchester M13 9PL United Kingdom
owenc,ulrich@
1. Introduction
In this paper we present a landmark based navigation mechanism for a mobile robot. The system uses a self-organising mechanism to map the environment as the robot is led around that environment by an operator. Detected landmarks, and their relative position towards each other, are recorded in a map that can subsequently be used to plan and execute paths from the robot's current location to a `goal' location speci ed by the user. The main motivation for the research described in this paper is to develop a mobile robot navigation system that is robust (through the use of perceptual landmarks), and allows the robot to plan arbitrary paths within its known environment. The system presented here achieves these objectives.
Abstract
Research in mobile robotics has produced two main approaches to modeling environments: metric and topological. In the rst scheme, an accurate metric map of the robot's environment is either constructed by the robot or supplied by a human designer (Kampman and Schmidt, 1991; Knieriemen and von Puttkamer, 1991). In the latter approach the environment is modeled as a graph containing nodes representing distinct locations, pathways between locations are denoted by arcs connecting the appropriate nodes (Kurz, 1996; Yamauchi and Beer, 1996; Zimmer, 1996; Mataric, 1992). A metric map has the advantage of being a simple and natural representation for human users. However, due to the amount of detail contained in such a representation, these maps are time consuming to construct, require large amounts of memory, and are often over speci ed for the task of general navigation. Conversely, the topological approach gives a compact representation since only distinctive places within the environment are encoded. In addition, this type of map is well suited for use with the various path planning algorithms that have been developed within the eld of articial intelligence (e.g. A , Best First Search). One of of Adaptive Behaviour '98, MIT Press 1998.
main problems with this method is perceptual aliasing i.e. distinct locations within the environment appearing identical to the robot's sensors. Various approaches to the problem of perceptual aliasing have been utilized within the topological mapping paradigm. One method is to e ectively increase the robot's perceptual resolution by adding and combining additional information from di ering sensor modalities (sensor fusion). In (Kortencamp and Weymouth, 1994), for example, vision is used to augment the sonar data of the robot. However, this type of approach cannot be guaranteed to disambiguate all situations, and is more useful as a tool for reducing, rather than eliminating, perceptual ambiguity. Other systems use positional information to disambiguate perceptually similar but physically distinct locations (Kurz, 1996; Zimmer, 1996; Mataric, 1992). However, since positional information based on the robot's internal odometry is subject to drift e ects, some means of correction is required if the robot is to map anything other than small scale environments. In (Kurz, 1996), for example, an extended Kalman- lter is used for drift compensation. The system described in this paper constructs a topological map of the environment based on a process of self-organisation of the robot's sensory data. The approach of self-organisation to landmark detection was chosen for two reasons. Firstly, interpreting the world using the robot's relatively impoverished sensors is difcult for the human designer. Thus, user de ned landmarks tend to be rather simplistic. The type of environment that can be categorised using this method is therefore restricted. Secondly, since the clustering techniques used in self-organisation enable a generalisation over perceptions, this approach gives a robust, noise tolerant, method of landmark detection. Global positioning information does not form part of the representation of the system described here, thus obviating the need for drift compensation. An exploration strategy is used to resolve perceptual ambiguity. The paper is structured as follows: Section 2. deals
with the navigation mechanism. In this section the implementation details of the system are discussed. Section 3. sets out the results of several experiments conducted within the robotics laboratory of Manchester University. This section also details a performance metric that was used to measure the robot's navigational ability. Section 4. draws conclusions and discusses further work. The navigation mechanism consists of two main processes: 1. Mapbuilding - construction of a topological vector map. 2. Map interpretation - path planning and execution. These two processes are performed consecutively, i.e. the mapbuilding process is fully completed before map interpretation begins. The robot used for our experiments was a Nomad 200 mobile robot (see gure 1). This robot is equipped with sixteen ultrasonic range nding sensors (range up to 6.5 m), sixteen infrared (IR) sensors (range up to 60 cm), twenty tactile sensors, a compass and a monochrome CCD camera. In the experiments described here, only the sonar sensors and compass were used.