电液伺服负载模拟器多余力补偿及控制策略
一种电液负载模拟器多余力的结构补偿方法

1 负 载 模 拟 器 数 学 模 型
1 . 1 负 载 模 拟 器 工 作 原 理
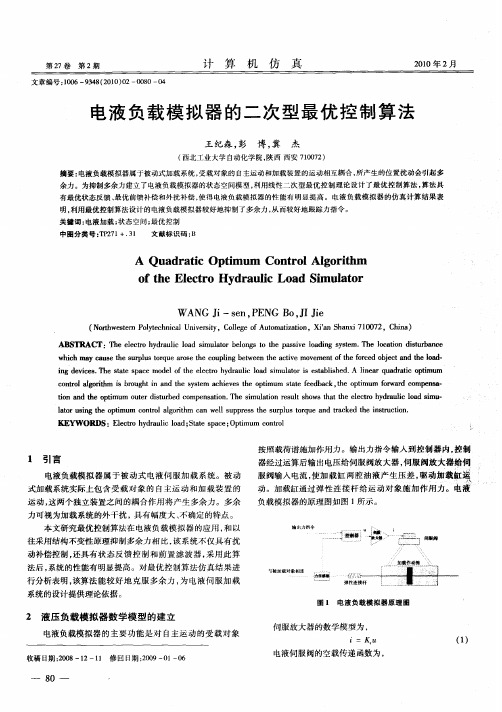
图1 为 负载 模 拟 器 的运 行 原 理 图 。 由加 载 马 达 、 加 载
系 统伺 服 阀 、 扭 矩传 感器 构成 了负载 模 拟 器 的加 载模 块 , 承 载
马达 、 承载 系统 伺服 阀 、 角位 移传 感 器构 成 了负 载模 拟 器 承 载
模块 。加 载模块 接 收力矩 信 号 , 承载 模 块接 收 角 位 移信 号 , 两
个模 块 分别 通过 相应 的传 感 器实 现 闭环反 馈 。
1 . 2 负载模 拟器 数 学模 型 将 负载 模拟 器 的加 载模 块与 加 载对 象模 块 均 看 作 阀控 马 数 看作 一样 , 从 而得 出加 载模 块 、 承 载模 块 及 整个 负 载 模 拟器
摘要 : 电 液 负 载 模 拟 器 属 于典 型 的 被 动 式 电 液 力 伺 服 系 统 。 为 抑 制 和 消 除 系统 内 固有 的 强 多 余 力 干 扰 , 本 文
突 破 传 统 的从 干 扰 补 偿 的 角 度 消 除 多 余 力 的 方法 , 建 立 位 置 系统 和加 载 系 统耦 合 在 一 起 的单 输 入 双 输 出 系统 数学模型 , 分 析 研 究 被 动 式 电液 力 伺 服 系 统 的 力 / 位 耦 合 机 理 并 以结 构 解 耦 为 出发 点 , 提 出 一 种 采 用 复 式 结 构 伺 服 马 达 进 行 同 步结 构 解 耦 的 加 载 新 原 理 , 以 此 来 消 除 系 统 中 的 多 余 力 。仿 真 结 果 表 明 : 此 方 法 可 以 有 效 地 消 除 小 梯 度 加 载 时 负 载 模 拟 器 的多 余 力 。
《2024年四足机器人液压驱动单元负载模拟系统多余力抑制研究》范文

《四足机器人液压驱动单元负载模拟系统多余力抑制研究》篇一一、引言随着科技的发展和应用的扩展,四足机器人在多个领域中的角色愈发重要。
四足机器人不仅能在极端环境中执行复杂任务,还因其高效的能源利用和卓越的稳定性得到了广泛的关注。
在四足机器人的研究中,液压驱动单元是决定其性能的关键部分。
然而,在实际的负载模拟系统中,由于多种因素的影响,如机械结构的摩擦、环境干扰以及液压系统本身的不稳定性等,常常会出现多余力的现象。
多余力不仅会降低机器人的工作效率,还可能对机器人的结构造成损害。
因此,对四足机器人液压驱动单元负载模拟系统的多余力抑制研究显得尤为重要。
二、多余力的产生与影响多余力主要由于液压驱动单元的内部和外部因素产生。
内部因素包括液压系统的非线性特性、系统内部摩擦等;外部因素则包括负载的动态变化、环境干扰等。
这些因素都可能导致机器人运动过程中产生不必要的力矩,即多余力。
多余力的存在不仅会降低机器人的工作效率,还会影响其运动的稳定性和精度,甚至可能对机器人的结构造成损害。
三、多余力抑制策略为了解决这一问题,研究者们提出了多种多余力抑制策略。
这些策略主要分为两大类:基于控制算法的策略和基于机械结构的策略。
1. 基于控制算法的策略:(1)引入先进的控制算法,如自适应控制、模糊控制等,以提高系统的稳定性,从而抑制多余力。
(2)采用扰动观测器来预测和补偿多余力的影响,以提高系统的抗干扰能力。
(3)通过优化PID(比例-积分-微分)控制器参数,调整系统响应的快速性和准确性,从而减小多余力的产生。
2. 基于机械结构的策略:(1)优化液压驱动单元的机械结构,减少内部摩擦和阻力,从而降低多余力的产生。
(2)通过改进液压系统的设计,提高其稳定性和可靠性,从而减少外部因素的干扰。
四、研究方法与实验结果在研究中,我们采用了基于控制算法的策略,通过引入先进的控制算法来抑制多余力。
我们首先建立了四足机器人的动力学模型,然后设计了自适应控制器和扰动观测器来处理多余力的问题。
电液负载模拟器的二次型最优控制算法
-
动。加载缸通过弹性连接杆给运动对象施加作用力。电液
负 载 模 拟 器 的原 理 图如 图 1 示 。 所
运动 , 这两个独立装置之 间的耦合作用将产 生多余力 。多余
力可视为加载 系统 的外干扰 , 具有幅度大 、 不确定 的特点。
本文研究最优控制算法在电液负载模 拟器 的应用 , 和以
余力 。为抑制 多余力建立了电液负载模拟器的状态空 间模型 , 利用线性二次 型最优控制理论设计 了最优控制算法 , 算法具 有最优状态反馈 、 最优前馈补偿 和外扰补偿 , 使得电液负载模拟器的性能有 明显 提高。电液负载模拟器的仿真计算结果表 明, 利用最优控制算法设计 的电液负载模 拟器较好地抑制了多余力 , 从而较好地跟踪力指令。
WANG J —sn。 E o J i i e P NG B ,IJe
( o h et nPl eh i l n esy oeeo uo a ztn X ' hni 10 2 C i ) N r w s r o tcnc i r t,Cl g f tm ta o , inSax 7 0 7 , hn t e y aU v i l A i i a a
第7 第 期 2卷 2
文 章 编 号 :06— 3 8 2 1 )2— 0 0— 4 10 9 4 (0 0 0 0 8 0
计
算
被动式电液伺服加载系统的多余力抑制
要求配置合适的蓄能器,使系统有适当的体积弹性模量,从而使活塞运动所产生的多余力在可控制的范围之 内;其次通过结构不变性原理对多余流量进行精确补偿,但由于伺服阀的流量增益与负载压力是非线性的,
采用状态观测器获得内部压力,以实现对流量的精确控制。以AMESim.Simulink为基础建立联合仿真模型, 仿真结果表明,采用上述方法对多余力的抑制效果有明显提高。 关键词:被动伺服加载;多余力;结构不变性;AMESim 中图分类号:THl37;TV273文献标志码:B文章编号:1000-4858(2014)05-0052-05
必V=—K.K生q(pL)
(6)
由于结构不变性原理在常规应用中往往将疋(P。)
图2
电液伺服加载系统方框图
万方数据
54
液压与气动
2014年第5期
图3应用结构不变性原理后的系统方框图
工作区
图4系统控制部分Shnulink模型
作为常值,而实际Kq(P。.)却是非线性的,简单的线性 化处理将不能使强迫流量得到完全补偿,从而导致结 构不变性原理的补偿效果大幅度降低。因此,考虑实 时负载压力下伺服阀的流量增益非常有必要。 虽然由式(1)可得实时缸压和流量的关系,但是 实际中测量伺服阀的负载压力往往会提高成本。而由 式(5)可知通过控制流量可以补偿干扰位移的运动, 式(1)也说明流量与液压缸内压力有关。因此在没有 压力传感器的情况下,利用现代自动控制理论通过系 统重构建立一套状态观测系统,采用状态观测器预估 系统状态的办法,实时地修正状态观测系统,使其与实 际系统一致¨…,从而保证观测器中液压缸两端的压力 与实际系统中的一致,其控制模型如图4所示。
2结构不变性原理的应用与改进
当假设,相关假设可参考文献[9]。除此之外,加载液压 缸与等效负载视为刚性连接,力传感器刚度较高,其弹
电动负载模拟器多余力矩产生机理及抑制_李成功
收稿日期:2004-12-24 作者简介:李成功(1980-),男,吉林松原人,博士生,cario @vip .sina .com .电动负载模拟器多余力矩产生机理及抑制李成功 靳红涛 焦宗夏(北京航空航天大学自动化科学与电气工程学院,北京100083) 摘 要:介绍了直流力矩电机驱动的电动负载模拟器的机械结构和工作原理,建立了电动负载模拟器执行机构的数学模型并用方框图表示.分析了直流力矩电机的机械特性并指出其正常工作的范围.分析了电动负载模拟器在启动过程、正常运行和换向过程中多余力矩产生的机理,提出用基于结构不变性原理的前馈补偿方案来补偿多余力矩.仿真结果从理论上证明了前馈补偿方案可以很好地解决多余力矩带来的干扰,实验结果也证明了前馈补偿方案的有效性和可行性.关 键 词:电动负载模拟器;多余力矩;结构不变性;干扰抑制中图分类号:TP 271+.4文献标识码:A 文章编号:1001-5965(2006)02-0204-05Mechanism and suppression of extraneous torque of motordriver load simula torLi Chenggong Jin Hongtao Jiao Zongxia(School of Automation Science and Electrical Engineering ,Beijing University of Aeronautics and Astronautics ,Beijing 100083,China )Abstract :Based on an introduction to the mechanical structure and operating principle of the load simulator drived by the direct current torque motor ,a mathematical model of the actuating mechanism of the electrical loading system was founded and was expressed by means of block diagram .The mechanical characteristic of the direct cur -rent torque motor and the operating range were studied .The production mechanism of the extraneous torque during the start -up ,operating mode and r eversing of the motor -drive load simulator was analyzed .A method of feedfor ward compensating the extraneous torque based on the principle of structure invariance was promoted .The result of the simulation shows theoretically that the feedforward c ompensating can reduce the interference caused by the extrane -ous torque effectively .The feasibility and effectivity of the method are also proved by experiments .Key words :motor drive load simulator ;extraneous torque ;structure invariance ;inter ference suppression 负载模拟器是用来模拟飞行器在飞行过程中舵面所受空气动力矩的地面半实物仿真设备,对于缩短系统研制周期,节约研制经费,提高可靠性和成功率有着重要意义.目前,国内外研制的各种负载模拟器大多是采用液压马达作为执行机构的电液伺服控制系统,其主要用于大转矩、大功率领域[1,2].有必要研制在小转矩范围内应用的负载模拟器.电动负载模拟器是一种转矩控制系统,它避免了电液伺服系统的缺点,又充分发挥电机伺服系统的优势,降低了成本,方便维护,对于负载模拟器的研制有重要意义.随着国防和军事工业的发展,对负载模拟器性能指标的要求越来越高.但在动态加载过程中,由舵机运动引起的多余力矩会严重影响系统的载荷谱跟踪精度.因此,弄清电动负载模拟器多余力矩的产生机理并采取合理的抑制措施是设计、改善系统控制性能的关键.2006年2月第32卷第2期北京航空航天大学学报Journal of Beijing University of Aeronautics and Astronautics February 2006Vol .32 No .21 系统介绍电动负载模拟器的结构原理如图1所示,它是以转矩为被控量的直流电机伺服系统,采用PWM 驱动装置,产生大功率电流驱动直流力矩电机对被加载对象加载,加载系统通过连接机构与承载对象相连,对其加载并随之运动[3,4].1—舵机系统;2—可调惯量盘;3—力矩传感器;4—力矩电机;5—底座图1 电动负载模拟器示意图由系统结构原理图可得电动负载模拟器的执行机构模型方框图,如图2所示.其中,u m 、M 、θl 、θm 分别为电枢电压、电动负载模拟器输出转矩、力矩传感器角位移和电机角位移;K a 、K r 、K t 和K e 分别为电机控制器电压放大倍数、电机控制调理电路增益、电机转矩系数和电机反电动势常数;B m 、J m 、L m 和R m 分别为电机阻尼系数、电机电枢的转动惯量、电枢回路总电感和电枢回路总电阻;J l 、B l 、G l 和G ε分别为负载等效转动惯量、负载等效粘性阻尼系数、负载等效扭转刚度和力矩传感器扭转刚度.图2 电动负载模拟器执行机构方框图2 多余力矩产生原因从物理概念上讲,舵机是被加载对象[5],它是按照位置指令进行运动的,负载模拟器的连接轴通过连接机构被迫与舵机一同运动,也就是说加载电机的运动规律与舵机轴的运动规律基本一致,与加载系统的控制作用无关.要理解电动负载模拟器多余力矩产生机理,首先要了解加载电机的机械特性.图3为加载电机在不同工作状态的机械特性曲线,图中横坐标为电机转矩;纵坐标为电机转速;T d 为连续堵转转矩;T p 为峰值堵转转矩;U 1为顺向峰值堵转电枢电压;U 5为逆向峰值堵转电枢电压.图3 力矩电机机械特性曲线电机峰值堵转转矩是受电机磁铁去磁条件所限制的最大堵转转矩,对应电枢电流称为峰值电流.电枢电流不能超过峰值电流,否则电机磁铁将失磁.同时,由于受到峰值堵转电压的限制,电机只能工作在斜线包含区域,其形状由电机本身特性决定,只能在电机的设计中加以考虑,电机一旦出厂,斜线包含区域的形状就确定了.用户在使用时,必须保证电枢电流在允许的范围内.为了使电动负载模拟器能够正常工作,舵机角速度不能超过斜线包含区域对应的最大转速.下面对电动负载模拟器在启动过程、正常运行和换向过程中多余力矩产生的机理分别加以分析.1)启动过程在负载模拟器启动前,加载电机和舵机均处于静止状态,此时多余力矩为零.当舵机顺时针转动时负载模拟器启动,电机电枢被迫顺时针转动,从而产生反电动势.反电动势作用于电枢,产生电枢电流,进而产生电磁转矩.此电磁转矩方向为逆时针,与电机运动方向相反,即为瞬态多余力矩.其产生过程可以从力矩电机机械特性曲线上解释,负载模拟器未启动时电机处于O 点,突然启动时带动电机,使其有一转角,由于控制电压不能突变,此时电机处于A 点,在电机控制器控制电压作用下,回复到B 点.在此过程中偏离纵坐标的值即为多余力矩值.由于舵机的角速度、力矩信号传输的延迟、电枢电阻、电机电枢电感、电机控制电路的滞后等因素的影响,实际过渡过程为·205·第2期 李成功等:电动负载模拟器多余力矩产生机理及抑制曲线O CB ,如图4所示.图4 启动过程中多余力矩的产生2)正常运动与启动过程相似,在负载模拟器和舵机正常运动中,当舵机有一角位移变化时也会产生多余力矩,如图5所示.为了抵消多余力矩,电机有一定的电枢电压变化.但由于滞后的存在,导致电枢电压与其反电动势之差随电枢速度的增大而增大,从而导致舵机速度越快,多余力矩越大,在图5中即曲线O 1CB 曲率越大,顶点C 与纵坐标轴距离越远.图5 运行过程中多余力矩的产生3)换向过程当舵机运动换向,电枢反电动势也跟着换向.然而由于滞后的存在,电机电枢电压还来不及换向,从而导致二者之差很大,使电枢电流非常大.电枢电压需要改变方向才能消除多余力矩.可见舵机换向时的多余力矩比负载模拟器启动时的多余力矩还要大,如图6所示.图6 换向过程中多余力矩的产生3 多余力矩的抑制在动态加载过程中,由舵机运动引起的多余力矩会严重影响系统的加载精度,使系统的稳定性变坏、频宽变窄、加载灵敏度降低.因此必须设法对其进行抑制.要消除多余力矩可以采取被动式和主动补偿两种方案.1)被动式方案被动式方案其基本原理是增大电流或机械机构的滤波作用,从而在结构上减小多余力矩的影响程度,增加电机电枢电阻、降低连接刚度、增大电枢电感等.由于受到物理条件的限制,只能把多余力矩消除到某种程度,并且它们都是以增加能源损耗作为代价,因而不宜单独使用.2)主动补偿方案.主动补偿方案通过某种途径来预测强迫电流,依靠控制策略进行主动补偿.本文主要介绍基于结构不变性原理的主动补偿方案.力矩电机的力矩输出中除了与电机电枢电压U m 相关的部分为可控输出以外,其他部分为干扰力矩.从动力执行机构的简单模型来看,系统的干扰就是舵机的角速度﹒θf ,根据结构不变性原理只要加入该角速度的固定系数前馈补偿就完全可以消除干扰.由电动负载模拟器执行机构方框图表示的动力学方程,经拉普拉斯变换可得其传递函数关系式M (S )=K tR mU c (S )-J m L m R m S 2+J m +L m B m R m S +B m +K e K t R m S ·θl (S )J m L m R m G εS 3+J m G ε+B m L m R m G εS 2+B m G ε+L m R m +K e K tG εR m S +1 从上式可知,可以使用力矩传感器角速度﹒θl 完全补偿干扰力矩,且补偿后的动力机构传递函数将不受负载部分机械谐振频率的制约,故可以大大提高系统的闭环频宽.将执行机构的传递函数表达成不同的形式,可以看出从力矩电机角速度﹒θm 和舵机的角速度﹒θf 引入前馈补偿也可以补偿干扰力矩.综合考虑补偿后系统的频宽、实现难易程度等因素,本文选择使用力矩传感器输出轴角速度﹒θl 进行前馈补偿,该方案的系统方框图如图7所示.·206·北京航空航天大学学报 2006年图7 使用﹒θl 的消扰原理方框图图中:G m (S )=J m L m R m G εS 3+J m G ε+B m L m R m G εS 2+B m G ε+L m R m +K e K t G εR mS +1根据不变性原理有G c om (S )=G d (S )(T a S +1)K r ·K a ·K t,这就使补偿后的动力机构传递函数为三阶环节.因为角速度信号中已经包含了负载部分的影响因素,经补偿的控制系统可以不受负载变化的影响.4 仿真及试验结果根据电动负载模拟器的数学模型,使用Mat -lab 进行了计算机仿真,并进行了试验分析,比较了加入前馈补偿环节后多余力矩的消除情况.数学模型中的各个参数取值情况如表1所示.表1 参数表参数取值参数取值K a 10L m /mH 7.9K r0.8R m /Ψ4.0K t /(N·m ·A -1)4.375J l /(kg ·m 2)0.129K e /(V ·s ·rad -1)4.375B l /(N ·m ·s ·rad -1)0.6B m /(N ·m ·s ·rad -1)0.232G l /(N·m ·rad -1)48738J m/(kg ·m 2)0.038G ε/(N ·m ·rad -1)190985 1)仿真结果首先观察电动负载模拟器在没有加入前馈补偿环节前的多余力矩产生情况.给定转矩输入为零,干扰输入为5Hz 的正弦信号,幅值为0.2rad 的角度信号时,系统产生的多余力矩的仿真结果如图8所示.由上面分析结果可知补偿环节G co m (S )中含有高阶微分环节,在仿真时难以实现完全补偿,根据系统中各结构参数的特点可将其简化成PD 控制环节,鉴于纯微分环节在控制系统中的不可用性和在实际应用中的不可实现,G com (S )用不完全图8 未补偿时仿真结果微分PD 环节来实现.加入前馈补偿后系统多余力矩的仿真结果如图9所示,图8和图9的仿真结果对比非常明显,未进行任何补偿前多余力矩为15N ·m ,引入力矩传感器输出轴角速度前馈补偿信号后多余力矩下降到0.04N ·m .因此基于结构不变性原理的前馈补偿很好地解决了多余力矩带来的干扰.图9 加入前馈补偿后仿真结果2)试验结果对以上的理论和方法进行了试验验证,图10和图11分别为加入补偿前后系统多余力矩试验结果.图10 加入前馈补偿前试验结果图11 加入前馈补偿后试验结果试验结果表明,采用前馈补偿以后,减小了多余力矩,与仿真结果是基本一致的.但由于试验过·207·第2期 李成功等:电动负载模拟器多余力矩产生机理及抑制程中干扰信号和非线形因素的存在,试验效果不如仿真效果明显.5 结束语电动负载模拟器多余力矩的产生是由于舵机角位移变化引起,在启动过程、正常运行和换向过程中均会产生多余力矩.仿真和试验结果表明,基于结构不变性原理的前馈补偿引入力矩传感器输出轴角速度作为补偿环节,可以有效地补偿多余力矩的干扰,且补偿后的动力机构传递函数不受负载部分机械谐振频率的制约,可以大大提高系统的闭环频宽.另外这种方式也比较容易实现,有着较好的工程应用价值,也有利于电动负载模拟器的应用和推广.参考文献(References)[1]任志婷,焦宗夏.小转矩电动式负载模拟器的设计[J].北京航空航天大学学报,2003,29(1):91~94Ren Zhiting,Jiao Zongxia.Des ign of mot or-drive load simulator with s malltorque outputs[J].Journal of Beijing Universit y of Aeronauticsand Astronautics,2003,29(1):91~94(in Chinese)[2]Yoons u Nam,Jinyoung Lee,Sung Kyung Hong.Force control s ys-tem des ign for aerodynamic l oad simulator[A].In:Proceeding of theA merican Control Conference[C].Chicago:lllinois USA,2000,7:3043~3047[3]华 清.电液负载模拟器的关键技术研究[D].北京:北京航空航天大学自动化科学与电气工程学院,2001Hua Qing.Study on the key technology of electro-hydraul ic load s im-ulator[D].Beij ing:School of Automation Science and Electrical Engineering,Beijing Universit y of Aeronautics and As tronautics,2001(in Chines e)[4]李运华.负载模拟器的多余力矩的抑制方法研究[J].机床与液压,1999,2:27~30Li Y unhua.Research on method to reject to extraneous mo mental of load si mulat or[J].Machine&Hydraul ics,1999,2:27~30(in Chi-nese)[5]于慈远,赵克定,耿春明,等.飞行器负载仿真台速度反馈克服多余力矩的仿真研究[J].哈尔滨工业大学学报,1997,29(6):126~129Yu Ciyuan,Zhao Keding,Geng Chunming,et al.Study on speed feedback appl ied to craft load s timulator to overcome dis turbance torque[J].Journal of Harbin Ins titute of Technol ogy,1997,29(6): 126~129(in Chines e)(上接第166页)参考文献(References)[1]陈桂彬,邹丛青,杨 超.气动弹性设计基础[M].北京:北京航空航天大学出版社,2004.78Chen Guibin,Zou Congqing,Yang Chao.Elements of aeroelastic dy-namics[M].Beij ing:Beijing Univers ity of Aeronautics and As tronau-tics Press,2004.78(in Chines e)[2]李 健.遗传算法在复合材料气动弹性优化中的应用[D].北京:北京航空航天大学航空科学与工程学院,2002Li J ian.Aeroelas tic opti mization of composite wing structure using ge-netic al gorithms[D].Beijing:School of Aeronautic Science and Technology,Beijing University of Aeronautics and Astronautics,2002 (in Chinese)[3]向锦武,张呈林,周传荣,等.有频率、振型节线位置要求的结构动力学优化设计[J].计算结构力学及其应用,1995,12(4): 401~408Xiang Jinwu,Zhang Chenglin,Zhou Chuanrong,et al.Structural dynamics optimum design with given frequencies and pos ition of mode s hape node l ines[J].Computational Structural M echanics and Appli-cations,1995,12(4):401~408(in Chinese)[4]张世基.振动学基础[M].北京:北京航空航天大学出版社,1990.2Zhang Shij i.Elements of libration[M].Beijing:Beijing University of Aeronautics and Astronautics Press,1990.2(in Chinese)[5]管 德.飞机气动弹性力学手册[M].北京:航空工业出版社,1994.126Guan D e.Aircraft aeroelastic dynamic handbook[M].Beijing:Avia-tion Industry Press,1994.126(in Chinese)[6]Wan Z,Yang C,Zou C.D es ign studies of aeroelastic tail oring of for-ward-s wept compos ite aircraft us ing hybrid genetic al gorithm[R].A-IAA-2003-1491,2003[7]Sahoo D,Cesnic C E S.R oll maneuver control of U CAV wing us inganis otropic piez oelectric actuators[R].AIAA-2002-1720,2002 [8]Guan J,Aral M M.Progress ive genetic al gorithm for s olution of opti-mization problems with nonlinear equality and inequality cons traints [J].Elseview Science,1999,24(3):329~343[9]万志强,杨 超,郦正能.混合遗传算法在气动弹性多学科优化中的应用[J].北京航空航天大学学报,2004,30(12):1142~1146Wan Zhiqiang,Yang Chao,Li Zhengneng.Application of hybrid ge-netic algorithm in aeroelastic multidiscipl inary optimization[J].Jour-nal of Beijing Univers ity of Aeronautics and Astronautics,2004,30(12):1142~1146(in Chines e)·208·北京航空航天大学学报 2006年。
电动负载模拟器抑制多余力的结构补偿控制

T a i y u a n S h a n x i 0 3 0 0 5 1 . Ch i n a)
Ab s t r a c t :E x t r a t o r q u e e x i s t i n g i n t h e mo t o r d i r v e l o a d s i mu l a t o r i n l f u e n c e s t h e l o a d p r e c i s i o n a n d s y s t e m s t a b i l i t y . Ai mi n g a t t h e p r o b l e m ,b a s e d o n t h e w o r k p i r n c i p l e a n d s t r u c t u r e ,t h e mo d e l o f t h e l o a d s y s t e m w a s b u i l t a n d t h e s t r u c t u r e c o mp e n s a t i o n u n i t wa s
电液伺服系统的控制策略和性能分析
电液伺服系统的控制策略和性能分析电液伺服系统的控制策略和性能分析摘要:电液伺服系统是一种常用的工业控制系统,广泛应用于机械、航空、航天等领域。
在电液伺服系统中,液压元件是主要的执行元件,电液伺服系统的控制策略和性能分析是提高系统稳定性和响应速度的关键。
本文主要介绍了电液伺服系统的工作原理,常见的控制策略以及对系统性能的分析。
关键词:电液伺服系统;控制策略;性能分析;稳定性;响应速度1. 引言电液伺服系统以其高功率密度、可靠性和可调节能力成为许多应用领域的首选。
电液伺服系统的核心是液压传动装置,其将电信号转换为液压能量,通过液压缸或液压马达实现系统的运动控制。
因此,电液伺服系统的控制策略和性能分析对于提高系统的稳定性和响应速度至关重要。
2. 电液伺服系统控制策略2.1 比例控制比例控制是电液伺服系统中最简单和最常见的控制策略之一。
该策略通过调整比例阀的开度,使液压缸产生一定的运动。
在比例控制中,控制信号与反馈信号之间的差值乘以比例增益,得到输出信号。
2.2 积分控制积分控制是在比例控制的基础上加入积分环节,用于消除系统的静差。
在积分控制中,控制信号与反馈信号之间的积分值乘以比例增益,得到输出信号。
2.3 模糊控制模糊控制是一种具有自适应能力的控制策略,能够根据系统的动态特性调整控制策略。
模糊控制通过建立一组模糊规则,将输入信号映射到输出信号。
模糊控制的优点是对于非线性系统具有较好的控制效果。
2.4 自适应控制自适应控制是通过对系统参数进行估计和调整,实现对系统动态特性的自适应调节。
自适应控制可以根据系统的工作状态和性能要求,自动选择合适的控制策略。
自适应控制的优点是对于复杂系统具有较好的控制效果。
3. 电液伺服系统性能分析3.1 稳定性分析在电液伺服系统中,稳定性是一个重要的指标,它决定了系统是否能够保持预定的运动轨迹。
稳定性分析可以通过分析系统的传递函数、极点和频率响应来实现。
稳定性分析的目标是确定系统的稳定域和临界稳定性条件。
《四足机器人液压驱动单元负载模拟系统多余力抑制研究》范文

《四足机器人液压驱动单元负载模拟系统多余力抑制研究》篇一一、引言随着科技的发展和进步,四足机器人在多个领域,如救援、搬运和军事行动等方面获得了广泛应用。
其核心部分——液压驱动单元负载模拟系统,负责将负载力传递给机器人四肢,对于机器人稳定性和效率的提升具有重要作用。
然而,在实际应用中,系统往往面临多余力的产生和传播问题,这不仅影响机器人的性能,还可能对系统造成损害。
因此,研究四足机器人液压驱动单元负载模拟系统的多余力抑制问题,对于提高机器人的运动稳定性和操作性能至关重要。
二、系统构成及工作原理四足机器人液压驱动单元负载模拟系统通常包括负载、机器人肢体、液压传动系统及控制系统等部分。
其中,液压传动系统是传递动力和力的主要途径,而控制系统则负责调节和监控整个系统的运行。
在系统工作时,通过液压驱动单元的驱动,机器人肢体将负载力传递给模拟系统,并由控制系统进行实时调节,以实现稳定、高效的负载模拟。
三、多余力产生的原因及影响多余力的产生主要源于系统内部和外部的多种因素。
内部因素包括液压传动系统的泄漏、摩擦等;外部因素则包括环境变化、负载变化等。
多余力的存在会导致机器人运动不稳定,降低工作效率,甚至可能对系统造成损害。
因此,研究多余力的产生机制和影响因素,对于抑制多余力具有重要意义。
四、多余力抑制方法研究针对多余力的问题,研究者们提出了多种抑制方法。
其中,一种常见的方法是通过优化液压传动系统的设计,减少泄漏和摩擦等内部因素对系统的影响。
此外,通过引入传感器和控制系统进行实时监测和调节,也可以有效抑制多余力。
同时,利用先进的控制算法和技术,如模糊控制、神经网络等,进一步提高系统的稳定性和效率。
五、实验验证与结果分析为了验证多余力抑制方法的有效性,我们进行了多组实验。
实验结果表明,通过优化液压传动系统设计和引入先进的控制算法,可以有效抑制多余力的产生和传播。
同时,我们还对不同抑制方法的效果进行了比较和分析,发现综合运用多种方法可以取得更好的效果。
电液负载模拟器多余力的混合补偿策略
Hy b r i d Co mp e n s a t i o n Me t h o d o f Re d u n d a n t F o r c e f o r El e c t r i c a l — h y d r a u l i c L o a d i n g S i mu l a t o r
l i mi n a t e s t he s u r pl u s o f i t .I t ’ S o b t a i ne d b y a p p l y i n g t h e s t r uc t u r a l i n v a r i a n c e t h e o r y a n d s o l v i n g H m i x e d ・ s e n s i t i v —
c o m p e n s a t o r w h i c h c o m p e n s a t e s t h e m a j o i r t y p a r t s o f r e d u n d a n t f o r c e ,a n d a D i s t u r b a n c e o b s e ve r r( D O B)t h a t e —
Abs t r a c t:Ai me d a t t h e p r o b l e m o f b a d p e r f o r ma n c e i n l o a d i n g a c c ur a c y o f t h e e l e c t ic r a l - h y d r a u l i c l o a d i n g s i mu l a —
t o r d u e t o t h e r e d u n d a n t f o r c e,a ma t h e ma t i c a l mo d e l i s b u i l t S O t h e me c h a n i s m o f r e d u n d a n t f o r c e i s p o i n t e d o u t ,
《2024年四足机器人液压驱动单元负载模拟系统多余力抑制研究》范文
《四足机器人液压驱动单元负载模拟系统多余力抑制研究》篇一一、引言随着科技的发展和进步,四足机器人在各个领域中的应用逐渐得到拓展,而液压驱动单元作为四足机器人的核心部分,其性能的优劣直接影响到机器人的运动性能和负载能力。
在四足机器人液压驱动单元负载模拟系统中,多余力的产生是一个普遍存在的问题,它会对系统的稳定性和精确性产生负面影响。
因此,对四足机器人液压驱动单元负载模拟系统多余力抑制的研究具有重要的理论意义和实际应用价值。
二、研究背景及意义四足机器人作为一种新型的移动平台,具有较好的地形适应能力和负载能力,在军事、救援、农业等领域得到了广泛的应用。
液压驱动单元作为四足机器人的关键组成部分,其负载模拟系统的性能直接影响机器人的作业效果。
然而,在实际应用中,由于各种因素的影响,如系统内部的摩擦、泄漏、外部环境的干扰等,会导致液压驱动单元在运行过程中产生多余力,进而影响系统的稳定性和精确性。
因此,对多余力抑制的研究对于提高四足机器人液压驱动单元负载模拟系统的性能具有重要意义。
三、国内外研究现状及发展趋势目前,国内外学者在四足机器人液压驱动单元负载模拟系统多余力抑制方面进行了大量的研究。
其中,国内学者主要从系统结构优化、控制策略改进、材料选择等方面入手,通过理论分析和实验验证,提出了一系列有效的多余力抑制方法。
而国外学者则更加注重从理论模型和算法方面进行研究,通过建立精确的数学模型和采用先进的控制算法,实现对多余力的有效抑制。
随着科技的不断进步,未来四足机器人液压驱动单元负载模拟系统将更加智能化、高效化、精确化。
四、多余力产生原因及影响四足机器人液压驱动单元负载模拟系统中多余力的产生主要源于以下几个方面:一是系统内部的摩擦和泄漏,二是外部环境的干扰和变化,三是控制策略和算法的不完善。
这些因素会导致液压驱动单元在运行过程中产生不必要的力和扭矩,进而影响系统的稳定性和精确性。
具体表现为:系统振动、运动轨迹偏差、能量损失等。
P-Q伺服阀抑制电液负载模拟器多余力的研究

P-Q伺服阀抑制电液负载模拟器多余力的研究王经甫,李洪人,张大鹏(哈尔滨工业大学机电工程学院,哈尔滨150001)摘要:建立了采用P-Q伺服阀控制加载的电液负载模拟器系统键图模型,并通过仿真验证了该模型的正确性。
通过对P-Q伺服阀和普通的流量伺服阀加载试验曲线的对比分析表明,采用P-Q伺服阀控制可以有效地抑制多余力。
关键词:电液负载模拟器;P-Q伺服阀;键图;多余力中图分类号:T H137 文献标识码:A 文章编号:1001-3881(2006)11-104-3Study on App ly i n g P-Q Servo-va lve to E li m i n a te Superfluous For ce ofE lectro-hydra ulic L oa d S i m u l a torWA N G J ingfu,L I Hongren,ZH ANG Dapeng(School of Mechanica l and Electrical Engineering,H ar bin I nstitute of Technology,Ha r bin150001,C hina) Ab stra ct:Bond graph model of electr o-hy draulic l oad si mulator contr o lled by P-Q serv o-v a lve wa s set up1It’s testified by si mula ti on1T hrough the co mparison with expe ri m ental l oading curve s of l oading s ystem contr olled by P-Q s e rv o-valve and fl o w se rv o -va l ve re s pectiv e ly,it is indicated tha t the for me r can effec tively e li m ina t e supe rfluous force1Keywor ds:Electro-hydraulic l oad si m ulat or;P-Q s e rv o-valve;Bond graph;Superflu ous force0 前言电液负载模拟器是用于模拟飞行器舵机所受空气动力负载的地面半实物试验设备。
正弦运动条件下负载模拟器的多余力补偿策略

作者简介 : 赵英娜 ( 1 9 9 1 一) , 女, 河北邢 台人 , 硕士研究 生 , 主 要研究方 向为 电液伺服及运动控制 。
理 的改进方案 , 提出了利用驱动伺服机构位置反馈信
液 压 与 气动
上, 活塞杆 一端 则 与转 动 横 梁 的一 端 相 连 。推 力矢 量 伺 服机 构底座 安装 于 刚度 支 撑板 上 , 活塞 杆 一 端则 与
1 . 1 工作 原 理
负载模 拟器 是用 来模 拟 飞行器 舵机 在 飞行过 程 中
舵面所受的空气动力载荷 , 是大型运载火箭和导 弹等
复杂 系统 的地 面半 实 物仿 真设 备 。按 照 加 载方式 的不
同, 负载模拟器可以分为机械式、 电动式和电液式¨ 。
与机 械式 和 电动式 负载 模 拟 器 相 比 , 电液 式 负 载模 拟
运 动是 有效 的 , 避 免 了受到 非 线性 因素影 响 的速度 反馈 对 多余 补 偿 效果 的干扰 , 对 用 于正弦 运动测试 的 负
载模 拟 器设 计提供 了一种 可行 的方 法 。
关键 词 : 正 弦运动 ; 多余 力 ; 信号补 偿 ; 相位 修 正 中图分类 号 : T H1 3 7 文献 标 志码 : B 文章 编号 : 1 0 0 0 - 4 8 5 8 ( 2 0 1 3 ) 1 0 - 0 0 2 3 - 0 5
梁绕 支点 的 旋 转 运 动 转 化 为 两 液 压 缸 的 直线 对 顶 运
动 。如 图 2所示 为力 加 载 系统 原 理 图 , 左 边 的为 力 加 载 系统 , 右 边 的为承 载系统 。
图3 常值 加 载 系统 模 型 方 框 图
由此 可得 出 , 常 值加 载 系 统 的输 力 矩 由两 部 分 组成: 加 载伺服 阀产 生 的输 出力矩 和承 载 对象 主 动 运
伺服电机负载模拟系统控制策略研究

伺服电机负载模拟系统控制策略研究摘要:通过阅读大量的参考文献,本文总结了相关伺服电机负载模拟系统控制策略的国内外研究现状。
对已存在的问题加以分析和总结。
然后对电动负载模拟系统位置扰动力矩分析与系统仿真,最后提出电动负载模拟系统位置扰动力矩抑制及控制策略研究,为相关研究提供参考。
关键词:伺服电机;负载模拟系统;控制策略1、国内外研究现状上世纪90年代日本学者应用Matlab进行了科学仿真分析,用来解决电动负载相关模拟系统的系列问题。
本世纪初期,美国科研人员把加载伺服电动负载模拟器的设备选为感应式力矩电动机,他们的模拟惯性负载是用惯性盘来模拟解决的。
而惯性盘是在其实验过程中被提出的,有效解决了该实验过程中的模拟难题。
直至2007年法国相关学者将负载模拟元件选为直流电机,使得加载过程中的冲击问题得到有效解决,并利用带间隙补偿的特定算法对元件进行控制。
本世纪初我国对电动负载模拟技术进行相关研究,截止到2022年,我国对负载模拟技术的理论基础已经熟练掌握,在仿真分析方面也取得了一定成就,很多实验成果在实际中已经取得了相应的应用。
研究所和高校是我国科学研究的主要阵地,其中代表性的大学包括:北京大学、四川大学、哈尔滨工业大学、国防科技大学等,都参与了我国国防系统的设计与研制,其中由这些大学成员组建的航空航天科研所在电动式负载模拟器的研制方面取得了显著的成就。
2、系统仿真与位置扰动力矩分析2.1位置扰动力矩特性分析对于加载施力机构来说,加载误差是指系统要求的指令加载力矩与加载机构实际输出力矩之间的差值。
加载误差与多种因素有关,例如传感器精度、轴系之间的摩擦力、电机控制器的死区和零漂、系统参数变化以及承载对象的主动位置扰动等等。
其中由承载对象的主动运动引起的加载误差与其他因素引起的加载误差有着本质的区别,且对加载系统影响最大,通常将这种干扰力称为位置扰动力矩。
相关文献定义,电动负载模拟系统是属于位置扰动型加载系统,承载对象按照自身控制器的位置指令运动。
电液伺服系统的控制策略和性能分析
电液伺服系统的控制策略和性能分析电液伺服系统作为一种集机械、液压、电气等多种技术于一体的高科技产品,在工业生产中具有重要的应用价值。
电液伺服系统通过控制液压传动系统的液压阀和执行元件,实现对负载的精准控制,具有响应速度快、控制精度高、动态性能优越等特点。
然而,一直是研究的热点和难点之一。
电液伺服系统的控制策略主要包括位置控制、速度控制和力控制等几种基本控制方式。
其中,位置控制是电液伺服系统最常用的控制方式之一,通过控制伺服阀的开度,实现对执行元件位置的精确控制。
而速度控制则是通过控制伺服阀的流量,调节液压缸的运动速度。
而力控制则是通过控制液压缸施加的力,实现对负载力的精确控制。
不同的应用场景需要选择合适的控制策略,以满足工艺要求。
电液伺服系统的性能分析主要包括静态性能和动态性能两个方面。
静态性能是指在稳态工作条件下,电液伺服系统的输出与输入之间的关系。
静态性能分析主要包括静态误差、静态刚度和静态灵敏度等指标。
动态性能是指在动态工作条件下,电液伺服系统对输入信号的响应速度和稳定性。
动态性能分析主要包括系统的时间响应、频率响应和阻尼比等指标。
通过对电液伺服系统的性能分析,可以评估系统的稳定性和控制质量,为系统的优化设计提供依据。
在电液伺服系统的控制策略和性能分析中,影响系统性能的因素有很多。
首先是系统的结构设计,包括液压传动系统的结构、液压缸的结构和伺服阀的结构等。
合理的结构设计可以提高系统的控制精度和承载能力,从而提高系统的性能。
其次是系统的控制算法,不同的控制算法对系统的性能有着重要影响。
常用的控制算法包括比例积分微分(PID)控制、模糊控制和自适应控制等。
选择合适的控制算法对系统的性能提升至关重要。
另外,系统的传感器和执行元件的质量也会影响系统的性能,高精度的传感器和执行元件可以提高系统的控制精度和稳定性。
电液伺服系统的控制策略和性能分析是一个复杂而又具有挑战性的研究领域。
在实际应用中,需要综合考虑系统的工作环境、负载特性和控制要求等多方面因素,从而选择合适的控制策略和优化系统的性能。
电液伺服系统的控制策略研究
电液伺服系统的控制策略研究随着科技的不断发展,电液伺服系统的应用越来越广泛。
电液伺服系统是指通过电学与机械学相结合的方式来实现精密的控制系统,其中液压部分负责力量的传输和变换,而电气部分则负责对系统进行控制和指令传输。
电液伺服系统具有反应速度快、精度高、效率高等优点,在机械工业、航空航天等领域都得到了广泛的应用。
本文将对电液伺服系统的控制策略进行深入研究。
1. 传统PID控制传统PID控制是电液伺服系统中最常用的一种控制策略。
PID控制器通过调节输出量使系统反馈量与参考量尽可能接近,其中比例项、积分项和微分项分别对应于响应速度、静态误差和稳定性。
在电液伺服系统中,PID控制器需要根据系统的动态特性来确定适当的PID参数,以获得较好的控制效果。
由于电液伺服系统的动态特性复杂,PID控制系统的参数选择往往需要经过多次试验和调整才能达到最优。
2. 自适应控制自适应控制是近年来电液伺服系统中较为流行的一种控制策略。
自适应控制器可以根据实时反馈信息自动调整控制参数,从而实现更为精准和稳定的控制效果。
自适应控制在电液伺服系统中的应用较为广泛,其优点在于可以实时监测系统状态和参数变化,从而及时进行调整,大大提高系统的控制精度和效率。
3. 模糊控制模糊控制是一种针对复杂非线性系统的控制策略,其核心思想是基于模糊数学理论,将人类的模糊思维应用于系统控制中。
电液伺服系统通常具有复杂的非线性特性,而模糊控制策略在这方面具有较好的适用性。
模糊控制器可以通过与模糊推理相结合的方式,实现对系统状态的自适应控制。
与传统控制相比,模糊控制可以在一定程度上克服系统的非线性和不确定性,提高系统的控制精度和鲁棒性。
4. 神经网络控制神经网络控制是一种基于神经网络理论的先进控制技术,其特点在于模拟人类的学习能力和适应能力,并可以自适应地调整控制器参数。
电液伺服系统通常需要在复杂的环境中进行运动控制,因此神经网络控制在这一领域中也得到了广泛的应用。
《四足机器人液压驱动单元负载模拟系统多余力抑制研究》范文

《四足机器人液压驱动单元负载模拟系统多余力抑制研究》篇一一、引言四足机器人作为现代机器人技术的重要分支,其液压驱动单元的负载模拟系统在实现机器人稳定、高效运动中发挥着重要作用。
然而,在实际应用中,系统多余力的产生成为制约其性能的重要因素。
本文针对这一问题展开研究,探讨多余力的产生原因及其抑制方法,以期为四足机器人液压驱动单元的优化设计提供理论依据和实践指导。
二、多余力产生原因分析1. 液压系统非线性因素:液压系统中的压力、流量等参数受多种因素影响,如温度、粘度等,导致系统非线性,从而产生多余力。
2. 机械结构误差:四足机器人的机械结构在制造、装配过程中可能存在误差,导致各部分运动不协调,产生多余力。
3. 控制算法不完善:控制算法的优劣直接影响机器人的运动性能,若算法不完善,可能导致机器人运动过程中产生多余力。
三、多余力抑制方法研究1. 优化液压系统设计:通过改进液压系统的结构、材料等,降低系统非线性因素对多余力的影响。
例如,采用高精度传感器、优化管路布局等。
2. 提高机械结构精度:在制造、装配过程中严格控制机械结构的精度,减小误差,使各部分运动更加协调。
3. 完善控制算法:针对四足机器人的运动特性,设计合理的控制算法,实现机器人运动的精确控制。
例如,采用模糊控制、神经网络控制等方法,提高机器人的自适应能力和抗干扰能力。
四、负载模拟系统设计及实验验证1. 负载模拟系统设计:根据四足机器人的运动特性和实际需求,设计合理的负载模拟系统。
该系统应具备模拟各种复杂工况的能力,同时要便于实验验证和调试。
2. 实验验证:通过实验验证负载模拟系统的性能及多余力抑制效果。
在实验过程中,应记录各种数据,分析实验结果,为后续的优化设计提供依据。
五、实验结果与分析1. 实验结果:通过实验验证,发现所设计的负载模拟系统在抑制多余力方面取得了显著效果。
机器人在各种工况下的运动更加稳定、高效,多余力得到有效抑制。
2. 分析:分析实验结果,发现优化液压系统设计、提高机械结构精度和完善控制算法等方法在抑制多余力方面均发挥了重要作用。
负载模拟器多余力补偿控制研究
摘
要 :通过改进传统 的结构不变性原理 ,提 出 了一 种在 电液伺服 负载模 拟器 动态加 载过程 中有效 抑制 由
于舵机位置扰动所 引起多余力 的方案 。采用傅 里叶变换 确定舵 机位 置信号 中的频 率分量 ,运用最 小二乘 法对 各 频率分量对应 的舵机速度信号 的相位进行校正 并求 和 ,得 出舵 机位置 系统 准确 的速 度输 出信 号 ,从而利 用该信
Ke y wo r d s :l o a d s i mu l a t o r ;s u r p l u s f o r c e ;F o u r i e r t r a n s f o r m ;p h a s e c o r r e c t i o n
0 引 言
在试验 室 中常用 负载模拟 器来 复现 飞行器 、 船舶 舵机 的受 载情 况 ’ 。从 物 理 概念 上 讲 ,舵 机 是被 加 载 对 象 ,它 是 按 照 位 置 指 令 进 行 运 动 的 , 负载模 拟 器 输 出轴 通 过 连 接 机 构 被 迫 与 舵 机 一 同 运 动 ,也 就是 说 加 载 马 达 的运 动 与 舵 轴 的 运 动 规
c a n b e o b t a i n e d . T h e s i g n a l c a n b e u s e d f o r l f o w c o mp e n s a t i o n o f t h e l o a d i n g s y s t e m t o e l i mi n a t e t h e s u r p l u s f o r c e o f t h e s y s —
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Ab s t r a c t : I n o r d e r t o e l i mi n a t e v a l u e a n d i mp r o v e p r e c i s i o n a n d p e r f o r ma n c e o f e l e c t r i c — h y d r a u l i c s e r v o
s y s t e m ,t h e i mp r o v e me n t s c h e me b a s e d o n t h e s t r u c t u r e i n v a r i a n c e p r i n c i p l e i s p r o p o s e d o n t h e ou f n d a —
摘 要: 为了抑制 多余力值, 改善电液伺服 系统加载精度与 系统性能, 在对正弦信号施力机构数学 建模 的基 础上 , 提 出了基 于 结构 不 变性 原 理 的 改进 方案 , 利 用驱 动 伺服 机 构 位 置反 馈 信 号 进 行 辨
识, 构造理 想 的速度 补偿 信号进 行 流量 前馈补 偿 , 抑制 多余 力 , 并 利 用 最 小二 乘 法在 线 辨识 补偿 信 号修 正相 位有 效地 补偿 了多余 力. 对 正弦运 动施 力机 构 多余 力 的补偿提 供 了理论依 据 .
( S c h o o l o f Me c h a n i c a l , E l e c t r o n i c a n d C o n t ol r E n g i n e e r i n g , B e i j i g n J i a o t o n g Un i v e r s i t y , B e i j i g n 1 0 0 0 4 4 , C h i n a )
f o r c e o f e l e c t r o — hy d r a u l i c s e r v o l o a d s i mu l a t o r
Z HANG J i n y i n g, Z HAO Yi n g n a, Y AN Ha o, LI C h a n g c h u n, SUN Me n g
关键 词 : 多余 力 ; 相 位修 正 ; 相 位辨 识 ; 位 置反 馈 中图分 类号 : T P 2 7 3 文 献标 志码 : A
Re s e a r c h o n c o mp e n s a t i o n a n d c o n t r o l s t r a t e g y o f r e d u n d a n t
t i o n o f ma t h e ma t i c a l mo d e l i n g o f S i n u s o i d a l f o r c e me c h a n i s m .Th e me t h d o i s p r o p o s e d wi t h t h e U e s o f p o s i t i o n f e e d b a c k s i g n a l o f t h e d r i v i n g s e r v o s y s t e m t o i d e n t i f y ,t h e s t r u c t u r e o f s p e e d c o mp e n s a t i o n s i g n a l t o p r o c e e d l f o w f e e d — f o r wa r d t o o mp c e n s a t e a n d r e s t r a i n r e d u n d a n t f o r c e .I n o r d e r t o o mp c e n at s e t h e r e d u n d a n t f o r c e e f f e c t i v e l y,i t u s e s l e a s t s q u a r e p r o c e d u r e f o r o n — l i n e i d e n t i f i c a t i o n t o omp c e n at s e
s i g n a l a n d or c r e c t p h a s e .Th i s me t h o d c a n p r o v i d e t h e t h e o r e t i c a l b a s i s a n d g u i d a n c e f o r t h e o mp c en a— s
第3 8卷 第 1 期
2 0 1 4年 2月
北
京
交
通
大
学
学
G
报
I Hale Waihona Puke E R S ! r r Y — —
V o 1 . 3 8 No . 1
E .2 Q
J oU RN AL o F B E UI N GJ I △ ( ] r
文章编 号 : 1 6 7 3 — 0 2 9 1 ( 2 0 1 4 ) 0 1 — 0 1 4 6 — 0 7
D OI : 1 0 . 1 1 8 6 0  ̄. i s s n . 1 6 7 3 — 0 2 9 1 . 2 0 1 4 . 0 1 . 0 2 8
电液 伺 服 负 载模 拟器 多余 力补 偿 及 控 制 策 略
张金英 , 赵英娜 , 延 皓, 李长春 , 孙 萌
( 北京交通大学 机械 与电子控制工程学 院 , 北京 1 0 0 0 4 4 )