第2章 先进去噪算法
mixture of diffusers算法原理

mixture of diffusers算法原理【最新版】目录1.Mixture of Diffusers 算法概述2.Mixture of Diffusers 算法原理3.Mixture of Diffusers 算法的实际应用4.Mixture of Diffusers 算法的优点与不足正文【Mixture of Diffusers 算法概述】Mixture of Diffusers(简称 MoD)算法是一种先进的图像去噪方法,通过将不同类型的扩散器相结合来实现图像的降噪。
在图像处理领域,去噪一直是一个重要的研究课题。
由于图像在拍摄、传输和存储过程中,很容易受到噪声的影响,因此去噪技术在提高图像质量方面具有重要意义。
【Mixture of Diffusers 算法原理】Mixture of Diffusers 算法主要基于扩散器的原理,扩散器是一种能够在图像中传播颜色信息并逐渐淡化噪声的滤波器。
MoD 算法将多种不同类型的扩散器相结合,以达到更好的去噪效果。
具体来说,MoD 算法包括以下几个步骤:1.选择合适的扩散器:根据图像的特点和噪声类型,选择适当的扩散器。
常见的扩散器有高斯扩散器、双边扩散器和周向扩散器等。
2.扩散器权重分配:为了平衡不同扩散器之间的作用,需要合理分配扩散器的权重。
通常采用软阈值法或者梯度下降法等优化算法来调整权重。
3.扩散器融合:将不同类型的扩散器按照权重进行融合,得到一个总的扩散器。
融合方式有多种,如线性加权、指数加权等。
4.应用扩散器:将融合后的扩散器应用于图像,通过多次迭代,使图像中的噪声逐渐被淡化,从而达到去噪的目的。
【Mixture of Diffusers 算法的实际应用】Mixture of Diffusers 算法在实际应用中表现出良好的去噪效果,尤其在处理高斯噪声、椒盐噪声等常见噪声时,具有较高的去噪性能。
此外,该算法具有较好的通用性,适用于多种图像格式和场景。
基于深度学习的图像去噪算法优化

基于深度学习的图像去噪算法优化第一章引言1.1 问题背景随着数字图像的广泛应用,图像质量问题变得尤为重要。
然而,现实中的图像往往受到噪声的干扰,导致图像质量下降。
因此,图像去噪成为了一个研究热点,尤其是基于深度学习的图像去噪算法。
1.2 研究目的本文旨在优化基于深度学习的图像去噪算法,提高图像去噪的效果和性能。
第二章深度学习与图像去噪2.1 深度学习简介深度学习是一种机器学习算法,通过多层神经网络模拟人脑的工作方式,实现从数据中学习和提取特征的能力。
2.2 图像去噪问题图像去噪是指通过算法处理,减少图像中存在的噪声,以恢复原始图像的清晰度和细节。
第三章基于深度学习的图像去噪算法3.1 自动编码机自动编码机(Autoencoder)是一种常用的深度学习网络结构,主要用于图像去噪任务。
它由编码器和解码器组成,通过训练数据重构和原始图像比较来学习有效的特征表示,从而去除图像中的噪声。
3.2 生成对抗网络生成对抗网络(GAN)是一种强大的深度学习模型,由生成器和判别器构成。
生成器负责生成去噪后的图像,判别器则负责判断生成的图像与原始图像的差异。
通过不断的对抗学习,生成器可以生成更加真实的去噪图像。
第四章算法优化4.1 数据增强为了提高算法的泛化能力和鲁棒性,我们可以使用数据增强技术,通过对原始图像进行旋转、缩放、平移等操作,生成更多的训练样本。
4.2 模型结构优化改进模型的结构可以进一步提高图像去噪的效果。
我们可以增加更深层次的网络结构、引入注意力机制等,以更好地捕获图像中的细节信息。
4.3 损失函数优化损失函数的选择对算法的性能有着重要的影响。
传统的均方误差损失函数对图像去噪任务并不适用,我们可以采用感知损失函数或结构相似度指标来更准确地衡量图像的质量。
第五章实验与结果5.1 数据集与实验设置我们使用经典的图像去噪数据集进行实验,通过在深度学习框架中搭建去噪模型进行训练和测试。
5.2 结果分析与讨论对实验结果进行分析和讨论,评估所提算法的性能和效果,与现有方法进行比较。
时间序列数据 去噪算法
时间序列数据去噪算法
时间序列数据是指按照时间顺序排列的数据集合,例如股票价格、气温、人口数量等。
这些数据通常包含噪声,即不必要的随机波动,这会影响数据的可靠性和准确性。
因此,去噪算法是时间序列数据分析中的重要步骤。
去噪算法的目的是从时间序列数据中去除噪声,以便更好地分析数据。
常用的去噪算法包括移动平均法、指数平滑法、小波变换法等。
移动平均法是一种简单的去噪算法,它通过计算一定时间窗口内的平均值来平滑数据。
例如,对于一个长度为n的时间序列数据,可以选择一个长度为m的时间窗口,然后计算每个时间点前后m/2个数据的平均值,用这个平均值代替原始数据。
这样可以去除一定程度的噪声,但是会导致数据的滞后性。
指数平滑法是一种更加复杂的去噪算法,它通过对数据进行加权平均来平滑数据。
具体来说,它将每个时间点的数据看作是前一时刻数据的加权平均值,其中权重随时间指数递减。
这样可以更好地保留数据的趋势性,但是对于非平稳数据效果不佳。
小波变换法是一种基于信号分解的去噪算法,它将时间序列数据分解成多个频率段,然后对每个频率段进行去噪处理。
这样可以更好地保留数据的局部特征,但是需要对数据进行复杂的数学处理。
去噪算法是时间序列数据分析中的重要步骤,不同的算法适用于不
同的数据类型和分析目的。
在实际应用中,需要根据具体情况选择合适的算法,并进行参数调整和优化,以获得更好的去噪效果。
改进的生成对抗网络图像去噪算法

数字图像在采集和网络传输的过程中,往往会受到一些随机信号的干扰而产生图像噪声,导致图像质量降低,从而影响人对图像的理解,所以有效地降低图像的噪声,提高图像的质量仍是图像处理领域的热点之一[1-2]。
图像去噪已经有很长的一段历史了,传统的图像去噪方法有空域滤波[3]和变换域滤波[4],空域滤波直接对图像的像素用滤波模板进行卷积,包括领域中值滤波[5]、均值滤波[6]等。
变换域滤波利用噪声图像和无噪图像在频域的分布差异,将图像转换到频域进行处理后再将结果变换回空间域,从而获得去噪后的图像,常见的变换域有小波变换域[7]、傅里叶变换域[8]等。
这些方法在一定程度上可以抑制图像的噪声,但修复结果往往会使图像纹理信息缺失,导致图像模糊。
BM3D [9](Block-Matching and 3D filtering )利用自然图像中存在的自相似性,通过对相似块转换并进行加权处理得到目标块,取得了不错的去噪效果。
CBM3D [10]是BM3D 改进的彩色图像去噪方法,该方法利用了亮度-色度颜色空间的每个通道中高度稀疏的局部3D 变换域中的滤波,这种去噪效果依赖相似块的选取,在图像去噪过程中常常存在一些复杂的优化问题。
近年来,深度学习在目标识别及检测等图像处理领域大放异彩,使得很多学者将深度学习模型应用于图像去噪。
深度卷积神经网络拥有很好的学习能力,通过对噪声样本的学习,能够实现图像去噪的自动化与智能化。
Burger 等[11]提出多层感知器MLP (Multi-Layer Per-改进的生成对抗网络图像去噪算法陈人和,赖振意,钱育蓉新疆大学软件学院,乌鲁木齐830046摘要:由于图像噪声的存在会干扰人对图像的理解,为了有效地去除噪声并获得比较好的视觉观感,提出一种基于生成对抗网络算法,该算法通过增加生成网络的宽度来获取更多的图像特征,并加入一个全局残差对输入的噪声图像进行特征的提取与学习,避免特征的丢失。
网络采用对抗损失和重建损失的加权和,在去除噪声的同时能够有效地保留图像的细节信息。
时间序列数据 去噪算法
时间序列数据去噪算法
时间序列数据是指在一段时间内按一定顺序记录下来的数据。
由于时间序列数据常常存在噪声,因此对这类数据进行去噪处理是非常必要的。
下面介绍一些常用的时间序列数据去噪算法:
1. 移动平均法
移动平均法是一种时间序列平滑方法,通过对每一个时间点前后一定时间范围内的数据进行平均,来消除噪声。
该方法的优点是易于实现,但是对于数据变化较快的时间序列不够灵敏。
2. 指数移动平均法
指数移动平均法是一种加权平均方法,它对最近的数据点赋予较高的权重,而对较早的数据点赋予较低的权重,从而达到去噪的目的。
该方法的优点是对于数据变化较快的时间序列具有一定的灵敏性。
3. 小波变换法
小波变换法使用小波函数对时间序列进行分解,将其分解成多个频率的子序列,再对每个子序列进行去噪。
该方法的优点是对于不同频率的信号具有不同的处理方法,能够更好地处理时间序列数据。
4. 自适应滤波法
自适应滤波法是一种基于时间序列数据自身特性进行去噪的方法。
它根据时间序列数据的特点,自适应地调整滤波器的参数,从而达到较好的去噪效果。
该方法的优点是能够更好地适应数据变化,但需要较多的计算资源。
总之,选择哪种时间序列数据去噪算法应该根据具体的数据特点以及实际应用场景进行选择。
数字图像处理中图像去噪的算法实现方法
数字图像处理中图像去噪的算法实现方法数字图像处理是指对数字化的图像进行处理、分析和修改的过程。
图像去噪是其中一项重要的任务,它的目标是尽量降低图像中的噪声,并使图像保持尽可能多的细节信息。
本文将介绍数字图像处理中常用的图像去噪算法及其实现方法。
一、图像噪声的分类在了解图像去噪算法之前,我们需要了解图像中可能存在的噪声类型。
常见的图像噪声主要有以下几种:1. 高斯噪声:是一种符合高斯分布的噪声,其特点是随机性较强,像素值呈现连续分布。
2. 盐噪声和胡椒噪声:分别指图像中像素值变为最大值和最小值的噪声。
这种噪声会导致图像呈现颗粒状或斑点状的亮点和暗点。
3. 椒盐噪声:是指图像中同时存在盐噪声和胡椒噪声。
4. 均匀噪声:是指图像中像素值随机增减的噪声,使图像呈现均匀的亮度变化。
二、常用的图像去噪算法1. 均值滤波算法均值滤波算法是一种简单直观的图像去噪方法。
它的基本原理是用邻域像素的平均值来代替当前像素的值。
具体实现方法如下:(1)选择一个固定大小的滑动窗口,如3×3或5×5。
(2)将窗口中的像素值求平均,并将平均值赋给当前像素。
均值滤波算法的优点是简单易懂、计算量小,但它对于去除噪声的效果有限,特别是对于像素值发生较大变化的情况效果较差。
2. 中值滤波算法中值滤波算法是一种基于排序统计的图像去噪方法。
它的基本原理是用邻域像素的中值来代替当前像素的值。
具体实现方法如下:(1)选择一个固定大小的滑动窗口,如3×3或5×5。
(2)对窗口中的像素值进行排序,并取中间值作为当前像素的值。
中值滤波算法的优点是对于不同类型的噪声都有较好的去除效果,但它在去除噪声的同时也会对图像细节产生一定的模糊。
3. 双边滤波算法双边滤波算法是一种基于像素相似性的图像去噪方法。
它的基本原理是通过考虑像素的空间距离和像素值的相似程度来进行滤波。
具体实现方法如下:(1)选择一个固定大小的滑动窗口,如3×3或5×5。
图像处理中的图像去噪算法使用方法
图像处理中的图像去噪算法使用方法图像去噪算法是图像处理领域的一个重要研究方向,它的主要目标是通过消除或减少图像中的噪声,提高图像的视觉质量和信息可读性。
图像噪声是由于图像信号的获取、传输和存储过程中引入的不可避免的干扰所致,例如传感器噪声、电磁干扰等,使图像中的细节模糊,影响图像的清晰度和准确性。
因此,图像去噪算法在许多应用领域中都具有重要的意义,如医学图像处理、计算机视觉、图像识别等。
现在,我们将介绍几种常见的图像去噪算法及其使用方法。
1. 中值滤波算法:中值滤波算法是一种简单而有效的图像去噪方法。
它的基本原理是对图像中的每个像素点周围的邻域进行排序,然后取中间值作为该像素点的输出值。
中值滤波算法适用于去除椒盐噪声和脉冲噪声,它能够保持图像的边缘和细节信息。
使用中值滤波算法时,需要设置一个邻域大小,根据该大小确定图像中每个像素点周围的邻域大小。
较小的邻域大小可以去除小型噪声,但可能会丢失一些细节信息,较大的邻域大小可以减少噪声,但可能会使图像模糊。
2. 均值滤波算法:均值滤波算法是一种基本的线性滤波技术,它的原理是计算图像中每个像素点周围邻域像素的平均值,并将平均值作为该像素点的输出值。
均值滤波算法简单易实现,适用于消除高斯噪声和一般的白噪声。
使用均值滤波算法时,同样需要设置邻域大小。
相较于中值滤波算法,均值滤波算法会对图像进行平滑处理,减弱图像的高频细节。
3. 降噪自编码器算法:降噪自编码器算法是一种基于深度学习的图像去噪算法。
它通过使用自编码器网络来学习图像的特征表示,并借助重建误差来去除图像中的噪声。
降噪自编码器算法具有较强的非线性建模能力,可以处理复杂的图像噪声。
使用降噪自编码器算法时,首先需要训练一个自编码器网络,然后将噪声图像输入网络,通过网络进行反向传播,优化网络参数,最终得到去噪后的图像。
4. 小波变换去噪算法:小波变换去噪算法是一种基于小波分析的图像去噪算法。
它将图像分解为不同尺度下的频域子带,通过对各个子带进行阈值处理来消除图像中的噪声。
数据去噪算法及公式

数据去噪算法及公式
数据去噪是一种常见的信号处理技术,用于从含有噪声的数据中提取出干净的信号。
以下是一些常见的数据去噪算法及其公式:
1. 均值滤波(Mean Filter):
公式:y[n] = (x[n] + x[n-1] + x[n+1]) / 3
这种方法将每个数据点的值替换为它周围邻近数据点的平均值。
2. 中值滤波(Median Filter):
公式:y[n] = Median(x[n-k], ..., x[n], ..., x[n+k])
这种方法将每个数据点的值替换为它周围邻近数据点的中值,其中k是滤波器的大小。
3. 加权平均滤波(Weighted Average Filter):
公式:y[n] = (w1*x[n-1] + w2*x[n] + w3*x[n+1]) / (w1 + w2 + w3)
这种方法根据权重系数对每个数据点进行加权平均。
4. 傅里叶变换滤波(Fourier Transform Filter):
这种方法基于频域分析和滤波,通过将信号转换到频域进行滤波处理,然后再进行逆变换得到去噪后的信号。
这些只是一些常见的数据去噪算法,具体选择哪种算法取决于数据的特点和噪声类型。
还有其他更高级的算法,如小波去噪、卡尔曼滤波等,可以根据具体需求选择合适的方法。
语音上行去噪经典算法

语音上行去噪经典算法语音去噪是指在语音通信或语音处理过程中,采用算法来减少或消除噪声对语音信号的影响,使语音更加清晰。
常用的语音去噪算法包括经典的谱减法、Wiener 滤波器和子空间方法等。
1. 谱减法是一种经典的语音去噪算法。
它基于傅里叶分析,将语音信号从时域转换到频域,通过对频域幅度进行修剪来减少噪声。
该算法的基本原理是在短时傅里叶变换(STFT)的基础上,对每个频带的幅度进行修正,减小低信噪比(SNR)的频带的幅度,然后进行逆变换得到去噪后的语音。
2. Wiener滤波器是一种以最小均方误差为准则的自适应滤波器。
该算法假设语音信号和噪声信号是高斯随机过程,通过最小化均方误差来估计信号和噪声的功率谱密度。
Wiener滤波器的基本原理是在频域采用逐帧处理,通过估计语音信号和噪声信号的功率谱密度比值,计算出每个频带的Wiener滤波器增益,然后将滤波器增益应用到频谱上得到去噪结果。
3. 子空间方法是一种基于信号与噪声在子空间中的性质来进行去噪的方法。
该算法利用信号与噪声在统计上的互相独立性,在子空间中对语音信号和噪声信号进行分离。
子空间方法常用的算法包括主成分分析(PCA)、独立成分分析(ICA)和稀疏表示等。
谱减法、Wiener滤波器和子空间方法是常用的语音去噪算法,它们在实际应用中有各自的优缺点。
谱减法简单易实现,适用于低噪声的情况,但在高噪声环境中会产生伪声;Wiener滤波器对于高噪声环境和非高斯噪声具有较好的去噪效果,但在弱信号和非平稳噪声环境下效果较差;子空间方法具有较好的去噪效果,对于非线性噪声具有较好的适应性,但计算复杂度较高。
除了经典算法外,近年来也出现了一些使用深度学习进行语音去噪的方法,如基于卷积神经网络(CNN)的去噪自编码器、基于循环神经网络(RNN)的长短时记忆网络(LSTM)等。
这些算法通过学习大量训练数据,利用神经网络的强大拟合能力来进行语音信号和噪声信号之间的映射,从而实现去噪效果。
信号去相噪噪算法
信号去相噪噪算法
信号去相噪噪算法是一种用于去除信号中噪声的方法。
以下是几种常见的信号去相噪噪算法:
1.滑动平均法:滑动平均法也称为移动平均法,是一种时间域上的信号光滑方法。
它通过将该点附近的采样点做算数平均,从而作为这个点光滑后的值。
2.小波阈值去噪:小波阈值去噪是一种非常有效的去噪方法。
它通常通过将小波分解结构中的高频系数全部变为零,然后将信号进行重构处理,以达到去噪的目的。
这种方法在去除噪声的同时,能够较好地保留信号的有用成分。
3.中位值法:中位值法也称为移动中位数法、中值滤波法等。
它通过在数据采样点密集且比较平滑的情况下,剔除离群值,从而实现对信号的去噪处理。
4.标准差法:标准差法通过规定一个数据波动阈值,当数据超过这个阈值时,便认为该数据离群。
这种方法适用于数据采样点密集且比较平滑的情况。
5.MAD法:MAD法定义了一个阈值,这个阈值叫做中位数绝对偏差MAD。
如果超过了3倍的MAD,则认为该数据离群。
以上信息仅供参考,如有需要,建议您咨询专业技术人员。
图像去噪算法性能与对比分析

图像去噪算法性能与对比分析引言:图像去噪是数字图像处理领域的重要研究内容之一,其目的是将存在于图像中的噪声信号或干扰信号去除,提高图像质量。
随着数字图像处理技术的发展,现在有许多不同类型的图像去噪算法被广泛应用于图像处理领域。
本文将对几种主流的图像去噪算法进行性能与对比分析。
一、经典去噪算法1. 均值滤波器均值滤波器是一种简单且广泛使用的图像去噪算法。
它通过计算像素周围邻域像素的平均值来取代该像素的值。
然而,均值滤波器的性能有限,对于复杂的噪声类型效果较差。
2. 中值滤波器中值滤波器是另一种常见的图像去噪算法。
它基于中心像素周围邻域像素值的中值来替代该像素的值。
中值滤波器能够有效地去除椒盐噪声等离群点噪声,但对于高斯噪声效果较差。
3. 总变差去噪(TV)总变差去噪是一种最小化图像总变差的优化算法。
它基于假设图像在相邻像素之间具有平滑性。
总变差去噪算法在去噪图像的同时能够保持图像的边缘和细节信息,因此在去除噪声的同时能够保持图像的清晰度。
二、基于机器学习的去噪算法1. 自编码器自编码器是一种无监督学习算法,通过将输入映射到隐藏层,再将隐藏层的特征映射重构为输出层,从而实现对输入信号的噪声去除。
自编码器通过对训练样本的学习来还原输入信号,从而能够保留原始图像的重要信息,同时去除噪声。
2. 条件生成对抗网络(CGAN)条件生成对抗网络是一种通过生成模型来进行图像去噪的算法。
它引入条件信息,将噪声图像作为输入,并生成一个与原始输入噪声图像对应的真实图像。
CGAN通过生成器和判别器之间的对抗学习来实现去噪效果的优化。
三、性能与对比分析1. 去噪效果比较:经典去噪算法如均值滤波器和中值滤波器能够有效去除一些简单的噪声,但对于复杂的噪声类型如高斯噪声等效果不佳。
基于机器学习的去噪算法如自编码器和CGAN则能够更好地处理复杂的噪声类型,恢复图像的清晰度和细节信息。
2. 处理速度比较:经典去噪算法通常具有较快的处理速度,适用于实时应用场景。
图像去除噪声方法

图像去除噪声方法图像去噪是数字图像处理的一种重要技术,在数字图像传输、存储和分析过程中都会遇到噪声的干扰。
目前图像去噪的方法主要分为基于空域的滤波方法和基于频域的滤波方法。
基于空域的滤波方法是指直接对图像的像素进行处理,常见的方法有均值滤波、中值滤波和高斯滤波等。
1. 均值滤波是一种简单的图像平滑方法,它通过对图像的每个像素值周围像素的平均值进行计算来减小噪声。
具体步骤是,对于图像中的每个像素,以该像素为中心取一个固定大小的窗口,然后计算窗口内所有像素的平均灰度值作为该像素的新值。
由于均值滤波是线性滤波器,因此它对于高斯噪声具有一定的去噪效果,但对于细节部分的保护能力较弱。
2. 中值滤波是一种非线性滤波方法,它通过在窗口内对像素值进行排序,将中间值作为该像素的新值来减小噪声。
相比于均值滤波,中值滤波更能保护图像的细节,对椒盐噪声(指图像中的黑白颗粒噪声)有较好的去噪效果。
3. 高斯滤波是基于高斯函数的一种线性滤波方法,它通过对图像像素的邻域像素进行加权平均来减小噪声。
高斯滤波的核函数是一个二维高斯函数,它具有旋转对称性和尺度不变性。
高斯滤波可通过调整窗口的大小和标准差来控制平滑程度,窗口越大、标准差越大,平滑程度越高。
高斯滤波对高斯噪声的去噪效果较好,但对于椒盐噪声则效果较差。
基于频域的滤波方法是指通过将图像进行傅立叶变换后,在频率域对图像进行滤波,然后再进行逆傅立叶变换得到去噪后的图像。
这种方法的优点是可以同时处理图像中的各种频率成分。
1. 傅立叶变换是一种将图像从空间域转换为频率域的方法,它将图像表示为了频率和相位信息的叠加。
在频率域中,图像可以分解为不同频率的成分,其中低频成分代表图像的平滑部分,高频成分代表图像的细节部分。
因此,通过滤除高频成分可以达到去噪的效果。
2. 基于小波变换的图像去噪方法利用小波变换的多分辨率分析特性来实现。
小波变换将图像分解成不同尺度的频带,通过选择合适的阈值来滤除噪声分量,然后再进行逆变换得到去噪后的图像。
数据去噪算法

数据去噪算法
1、中值滤波器(Median Filter):这是一种非线性数字滤波技术,通过用邻域中值替换每个像素值来去噪。
它对于去除椒盐噪声(Salt-and-Pepper Noise)特别有效。
2、Wiener滤波器:Wiener滤波器是一种统计最优估计方法,它基于对信号和噪声的统计特性的了解。
在去噪问题中,Wiener滤波器试图找到能够最大限度地减少误差的滤波器。
3、Kalman滤波器:这是一种线性动态系统状态估计方法,它也适用于去噪。
Kalman滤波器特别适合于处理带有随机噪声的数据。
4、小波去噪(Wavelet Denoising):小波分析可以提供信号的时间和频率信息,这使得它成为一种有效的去噪技术。
小波去噪通过将信号分解为小波系数,然后去除噪声的小波系数,最后重构信号。
5、非局部均值去噪(Non-Local Means Denoising):这种算法基于图像块的相似性。
它将每个像素替换为其最相似的邻居的平均值,这样可以有效地去除噪声。
几种去噪方法的比较与改进

几种去噪方法的比较与改进在信号处理领域,去噪是一个非常重要的任务,它是为了消除信号中的噪声成分,提高信号的质量。
有许多不同的方法可以用来去噪,这些方法之间有一些差别,也可以相互改进。
本文将对几种常见的去噪方法进行比较,并介绍它们的改进方法。
1.经典去噪方法:-均值滤波:均值滤波是一种简单的去噪方法,它用局部区域的像素值的平均值来替代当前像素的值。
这种方法的主要优点是简单易懂,计算效率高。
然而,均值滤波在去除噪声时可能会模糊图像的细节,并且对于孤立的噪声点效果较差。
-中值滤波:中值滤波是一种非线性滤波方法,它用局部区域的像素值的中值来替代当前像素的值。
与均值滤波相比,中值滤波不会模糊图像的细节,能够有效去除椒盐噪声等孤立的噪声点。
然而,对于高斯噪声等连续的噪声,中值滤波效果不佳。
-维纳滤波:维纳滤波是一种根据信号与噪声的统计特性来估计出信号的滤波方法。
它在频域上处理信号,根据信号和噪声的功率谱密度进行滤波。
维纳滤波在理论上是最优的线性估计滤波器,但是它对于噪声和信号的统计性质要求较高,对于复杂的噪声和信号模型不适用。
2.改进方法:-自适应滤波:自适应滤波是一种能够根据信号与噪声的统计特性进行自适应调整的滤波方法。
它利用邻域像素的相关性来估计滤波器的参数,从而更好地去除噪声。
自适应滤波方法可以根据图像的不同区域调整滤波器的参数,提高了去噪的效果。
其中,自适应中值滤波是一种常见的自适应滤波方法,它结合了中值滤波和自适应调整滤波器窗口的大小,能够在去除噪声的同时保护图像的细节。
-小波去噪:小波去噪利用小波变换的多尺度分析能力,将信号分解成不同尺度的频带,对每个频带进行阈值处理,然后进行重构,从而实现去噪的目的。
小波去噪具有局部性和多尺度分析的优势,能够更好地保护信号的细节和边缘。
其中,基于阈值的小波去噪是一种常见的方法,它通过设置阈值将噪声频带中的系数置零,保留信号频带中的系数,然后进行重构。
然而,小波去噪对于不同类型的信号和噪声需要选择不同的小波函数和阈值方法,这是一个非常重要的问题需要解决。
基于深度学习的语音去噪算法研究

基于深度学习的语音去噪算法研究章节一:引言语音去噪是指通过信号处理和机器学习技术,去除语音信号中的噪声干扰,使语音信号更加清晰和可理解。
随着人工智能技术的快速发展,深度学习作为一种强大的机器学习技术,被广泛应用于语音去噪领域。
本文将探讨基于深度学习的语音去噪算法的研究进展,并总结其优势和挑战。
章节二:传统语音去噪方法传统的语音去噪方法包括基于频域分析的方法和基于时域分析的方法。
基于频域分析的方法通过对语音信号进行快速傅里叶变换(FFT),将语音信号分解成频谱图,再利用滤波器去除频谱图中的噪声成分。
基于时域分析的方法则通过对语音信号进行帧分割和滤波处理,实现噪声的去除。
然而,这些方法往往需要手动选择滤波器参数和先验信息,且对噪声类型和信号特征的适应性较差。
章节三:深度学习在语音去噪中的应用深度学习技术的出现,使得语音去噪得到了极大的改进。
基于深度学习的语音去噪算法通过构建深度神经网络(DNN)、卷积神经网络(CNN)和递归神经网络(RNN)等模型,实现语音信号的自动特征提取和噪声的自动建模,从而达到去噪的目的。
典型的深度学习模型如循环神经网络(RNN)和变分自编码器(VAE)等,在语音去噪中取得了良好的效果。
章节四:基于深度学习的语音去噪算法研究方法基于深度学习的语音去噪算法的研究方法可以总结为以下几个步骤:首先,收集带有噪声的语音数据集,并进行预处理,包括信号采样、采样率转换等;然后,构建合适的深度学习模型,如基于CNN的自编码器(Denoising Autoencoder,DAE)和基于RNN的长短时记忆网络(LSTM),使用有噪声的语音作为输入,无噪声的语音作为输出;接下来,通过反向传播算法和梯度下降法,优化模型参数,使得模型能够准确地重构无噪声的语音;最后,使用训练好的模型对带有噪声的语音进行去噪处理。
章节五:基于深度学习的语音去噪算法的优势基于深度学习的语音去噪算法相比传统的方法具有以下几个优势:首先,深度学习可以自动地学习语音信号的特征表示,无需手动选择特征;其次,深度学习可以通过训练大规模的数据集,提高模型的性能;再次,深度学习模型具有较强的泛化能力,能够适应不同类型的噪声和信号场景;最后,基于深度学习的语音去噪算法在音频质量和信号完整性方面取得了显著的改善,使得语音信号更加清晰和自然。
图像处理中的去噪算法

图像处理中的去噪算法随着数字图像技术的不断发展,去噪算法在图像处理领域中扮演着至关重要的角色。
去噪算法主要用于消除数字图像中的噪声,提高图像的质量和清晰度,使其更加逼真。
本文将介绍图像处理中常用的去噪算法及其优缺点。
1、中值滤波中值滤波是一种简单而又常用的去噪算法,它的基本原理是将数字图像中的噪声像素替换为该像素周围邻域像素的中值。
中值滤波对于椒盐噪声和斑点噪声的去除效果非常好,但对于高斯噪声和其他类型的噪声效果较差。
2、均值滤波均值滤波是一种常用的线性平滑滤波算法,其基本原理是将数字图像中的噪声像素替换为相邻像素的平均值。
均值滤波对于高斯型噪声的去噪效果较好,但不适用于其他类型的噪声。
3、基于波尔兹曼机的去噪算法基于波尔兹曼机的去噪算法是一种新兴的非线性去噪算法,它采用一种基于概率逼近函数的非线性模型对数字图像中的噪声进行建模,并以此对数字图像进行去噪处理。
该算法适用于多种类型的数字图像噪声,具有较好的效果和鲁棒性。
4、小波去噪算法小波去噪算法是一种非常常用的去噪算法,它采用小波变换对数字图像进行分析,利用小波变换具有的多分辨率性、时间局部性和频率局部性特点,有效地抑制噪声,提高图像的清晰度和质量。
尤其是对于包含多种类型噪声的数字图像,小波去噪算法的效果尤为显著。
5、基于神经网络的去噪算法基于神经网络的去噪算法是一种较新的非线性去噪算法,它基于人工神经网络原理,对数字图像进行建模和训练,并以此对数字图像中的噪声进行去噪处理。
该算法具有良好的适应性和鲁棒性,适用于多种类型噪声的去除。
总之,不同类型的数字图像噪声需要采用不同的去噪算法进行处理。
相比较而言,小波去噪算法在各种类型数字图像噪声处理中都有很好的效果。
而基于神经网络的去噪算法在处理特定类型的噪声时也有着不错的去噪效果。
了解并熟悉各种去噪算法,能够为更好地处理数字图像提供有效帮助。
数据去噪算法及公式

数据去噪算法及公式全文共四篇示例,供读者参考第一篇示例:数据去噪是数据预处理中非常重要的一个环节,在数据科学和机器学习中,干净的数据对于模型的建立和预测结果至关重要。
数据的质量往往是影响模型性能的主要因素之一,而数据中的噪声往往会导致模型的性能下降。
数据去噪算法在实际应用中扮演着重要的角色。
数据去噪算法的目的是从数据中识别并移除不必要的干扰、复杂性或随机性,以便更好地揭示数据的潜在模式、结构和关系。
常用的数据去噪算法包括中值滤波、均值滤波、高斯滤波、小波去噪等。
这些算法各有特点,适用于不同类型和特点的数据。
中值滤波是一种基本的非线性滤波算法,它的核心思想是用一个窗口内的像素值的中值来代替该像素值。
中值滤波的优点是可以有效地去除图像中的椒盐噪声和斑点噪声,不会造成图像模糊。
中值滤波对边缘部分的保持效果较差,可能会导致图像出现边缘模糊的情况。
小波去噪是一种基于小波变换的非线性滤波算法,它的核心思想是对信号进行小波变换,去除小波系数中的噪声,并利用逆小波变换重构干净的信号。
小波去噪的优点是可以有效地去除不同尺度的噪声,并保持信号的细节和边缘特征。
小波去噪算法较复杂,需要选择合适的小波基和阈值函数。
除了以上常用的数据去噪算法外,还有很多其他方法和技术,如经验模态分解(EMD)、时域滤波、频域滤波等。
每种算法都有其适用的场景和特点,需要根据具体的数据类型和噪声类型选择合适的算法。
在实际应用中,数据去噪算法通常会与数据预处理和特征提取等步骤结合,以提高数据的质量和模型的性能。
数据去噪的效果直接影响到后续数据分析和建模的结果,因此需要认真选择和优化数据去噪算法。
在数据去噪算法的实际应用中,常用的评价指标包括均方误差(Mean Square Error,MSE)、信噪比(Signal-to-Noise Ratio,SNR)、峰值信噪比(Peak Signal-to-Noise Ratio,PSNR)等。
这些指标可以帮助我们评估数据去噪算法的性能和效果,并进行比较和选择。
5种降噪算法

深入了解五种降噪算法,教你消除嘈杂声音嘈杂的环境声音一直是我们生活和工作中面临的挑战之一,如何有效消除这些噪音,是许多人热衷于探索的问题。
本文将为你介绍五种不同的降噪算法,让你掌握消除噪音的技巧。
1.频率域降噪算法频率域降噪算法基于信号的频率特性,通过分析信号频谱中的噪声与信号的差异,将噪声成分从信号中分离出来,实现噪声的消除。
在音频处理领域,常用的频率域降噪算法有基于快速傅里叶变换的FIR 滤波器和卡尔曼滤波器。
2.时域降噪算法时域降噪算法主要是通过分析噪声信号与非噪声信号的时域波形特性,实现噪声的分离和消除。
时域降噪算法通常包括自适应降噪算法和基于深度学习的降噪算法。
3.小波域降噪算法小波变换是一种信号分解和重构的技术,可以将信号分解成多个频率分量,并对每个分量进行相应的处理。
在降噪领域,小波域降噪算法既可以基于频率域,也可以基于时域进行分析和处理。
4.Kalman滤波算法Kalman滤波是一种常见的状态估计算法,可以实现对噪声信号的建模和预测,然后通过建模来消除噪声。
Kalman滤波算法常用于噪声消除、图像插值等领域,其特点在于能够根据前一时刻的估计值和当前的观测值进行改进和优化。
5.基于深度学习的降噪算法深度学习技术在噪声消除中表现出了出色的效果,其基本思想是通过训练模型,使得模型能够对不同噪声场景下的信号进行自动分析和优化。
目前,基于深度学习的降噪算法已经广泛应用于语音识别、图像处理等领域。
以上五种降噪算法都有其优缺点,选择何种算法主要是根据应用场景的不同而定。
但无论你选择哪种算法,最关键的是根据场景的实际需求,对算法进行优化和调试,才能实现最佳的消噪效果。
医疗图像处理中的噪声去除算法研究

医疗图像处理中的噪声去除算法研究第一章介绍医疗图像处理中的噪声去除算法研究是医学影像技术领域中的重要内容之一。
在医学影像中,由于成像设备与病态组织、病理变化等因素的影响,图像中常常存在各种噪声。
而这些噪声在医学影像的诊断分析中将会对结果的准确性和可靠性产生较大的影响。
因此,研究如何对医学影像中的噪声进行有效去除具有极其重要的意义。
本文将针对医疗图像处理中的噪声去除算法研究进行探讨,对主要的噪声去除算法进行分析总结,并重点讨论他们的适用范围、优缺点及其在实际应用中的效果。
第二章常见噪声及其特点在医学影像中,常见的噪声主要有以下几类:1.高斯噪声高斯噪声是一种随机噪声,其数值符合正态分布。
在医疗影像领域,高斯噪声主要由成像设备本身的检测噪声、图像传输、计算机处理等过程引起。
其特点为噪声强度均值为0,方差为常数。
2.椒盐噪声椒盐噪声是一种非常特殊的噪声,通常表现为图像中出现黑白颗粒状噪点。
椒盐噪声主要由成像设备本身的故障等因素引起,这种噪声的存在对于图像分析和诊断非常不利。
3.泊松噪声泊松噪声是一种与图像强度成正比的噪声,其在CT、X射线等成像技术中较为常见。
泊松噪声与图像中强度值的大小相关,当强度值较小时,泊松噪声的影响会更加明显。
4.显式噪声显式噪声是一种由于成像系统等设备操作不当产生的一种不稳定电信号,其通常表现为明显的条纹或者斑点。
该噪声在实际应用中比较少见,但是通过噪声去除算法也可以取得很好的效果。
第三章常见的噪声去除算法医学影像中的图像噪声主要来自成像设备、图像处理等环节,噪声消除的原理是根据噪声的特点和成像设备的特性,去除图像噪声并保留图像结构信息。
近年来,随着科技的发展和算法的不断更新,医学影像中的噪声去除算法也逐渐得到了改进和提高。
1.经典噪声去除算法经典的噪声去除算法主要包括均值滤波、中值滤波、高斯滤波、双边滤波等方法。
这些算法普遍采用局部平滑技术,试图将图像噪声分离出来,并进行适当的滤波处理。
医疗影像处理中图像去噪算法的使用教程

医疗影像处理中图像去噪算法的使用教程医疗影像处理是医学领域中一个重要的研究方向,它涵盖了许多不同的任务,其中之一就是图像去噪。
在医疗影像中,噪声是不可避免的,它可能来源于设备、传感器或者图像采集过程中的其他因素。
图像去噪算法的目标是有效地去除这些噪声,以提高图像的质量和准确性。
本文将为您介绍一些常见的医疗影像处理中的图像去噪算法和它们的使用方法。
1. 统计滤波器统计滤波器是最常见的图像去噪方法之一。
它基于统计原理,通过计算像素邻域内的统计特性来估计真实像素值,并将其作为去噪后的像素值。
常见的统计滤波器包括均值滤波器、中值滤波器和高斯滤波器。
这些滤波器可以通过调整窗口大小和参数来实现不同程度的去噪效果。
在使用统计滤波器时,需要根据图像的特点选择合适的滤波器和参数。
2. 基于小波变换的去噪方法小波变换是一种频域分析方法,可以将信号或图像分解为不同频率的子带。
基于小波变换的去噪方法利用信号在小波域内的稀疏性,通过对小波系数进行阈值处理来实现去噪效果。
常用的小波变换方法有离散小波变换(DWT)和连续小波变换(CWT)。
在使用小波变换方法时,需要选择适当的小波基函数和阈值算法来平衡去噪效果和图像细节保留。
3. 基于非局部均值的去噪方法基于非局部均值的去噪方法是一种基于图像相似性的去噪算法。
它利用图像中的相似块来估计每个像素的真实值。
该方法通过计算相似度矩阵和加权平均来得到去噪结果。
基于非局部均值的去噪方法在去除图像噪声的同时能够保留图像的细节信息。
在使用该方法时,需要选择相似度度量函数和相似块大小来平衡去噪效果和图像细节保留。
4. 基于深度学习的图像去噪方法近年来,深度学习的发展为图像去噪问题提供了新的解决思路。
基于深度学习的图像去噪方法通常利用卷积神经网络(CNN)来学习图像的噪声分布和去噪映射。
通过训练大量的图像数据,深度学习方法可以自动学习到更有效的去噪策略。
在使用基于深度学习的图像去噪方法时,需要准备大量的训练数据并选择合适的网络结构和训练参数。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
假设:自然图像有相似的纹理,即图像自相似
具有相似纹理的像素很可能具有相似的像素值 相比于Bilateral滤波,具有更好的可区分能力
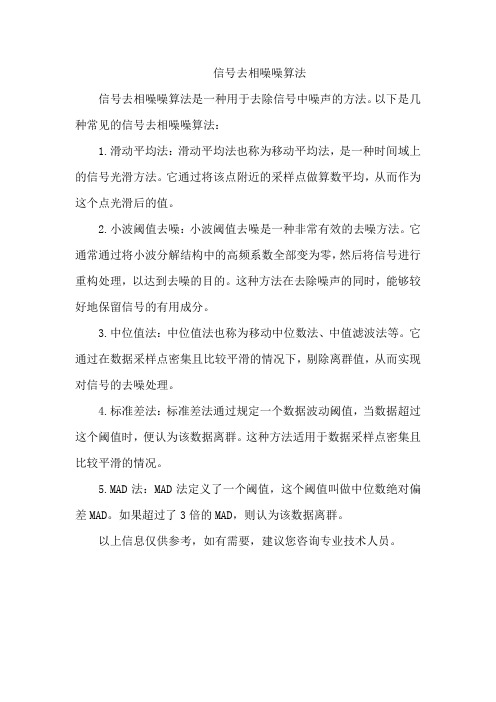
核心思想:
越是相似的 patch ,越是具有
大的权重。
p 和 r 、 q 对应的 patch 很相似, 因 此 具 有 大 的 权 重 w(p,r) 和 w(p,q) ,而 p 和 s 对应的 patch 不 相似,所以权重w(p,s)较小。
|| x ||4 4 1 16 81 3.1463
|| x || 3
|| x || max | xi |
i
TV:一维情况
差分的L1范数- Total Variation,全变差, 即变化量的总和
x ( x1 , x2 , , xN )
T V(x) | xi xi 1 |
每一个像素的估计值是图像中
所有像素值的加权平均。
计算方法 对于噪声图像 V,其估计图像为 NL(V) ,通过图像
中所有像素点的灰度值加权平均来得到每一个像素点p
的灰度值
NL V
p
q V
w p ,q V q
其中,w(p,q)为像素p和q之间的相似性权重,满足
0 w p ,q 1
q
w p ,q
1
计算方法
4. TV降噪——ROF的TV模型
基于L2范数的最小二乘导致线性系统,容易求解,但效果 不满意 基于L1范数的估计是非线性的,因不可求导,计算复杂, 但降噪和保持信号细节的效果好 提出寻求使以下积分最小的函数u(x, y) :
Total Variation
| u( x, y) | dxdy
结果对比
GSM
BM3D
改进算法:
执行BM3D两次:基本BM3D估计,最终BM3D
Shrinkage方法改进
结合形状自适应PCA
自适应方法 。。。
2.4 全变分(Total Variation)去噪
1. TV经典文献
L. Rudin, S. Osher, and E. Fatemi, Nonlinear total variation based noise removal algorithms, Physica D, 60: 259-268, 1992 【经典论文-ROF模型, 被引10340次】 A. Chambolle, and P. Lions, Image recovery via total variation minimization
NLM
参数:
1. 控制参数h太小去噪能力不强;h太大图像会变模糊 2. Patch尺寸太大,不能准确找到相似patch;patch尺 寸太小,太多的相似patch
不足:
计算量非常大,速度慢
关键在于计算两个patch之间的相似性
改进算法:
不计算欧氏距离,用其他相似度测度方法替代
对Patch进行降维,如PCA
更为稀疏(sparse)的表示是否能获得更好的效果?
2. BM3D
——Dabov et al., 2006 (IEEE TIP)
组合具有相似局部结构的patch
对于每一个group(3D)进行联合去噪 有效融合多个估计
单个BM3D估计
Block matching Inverse 3D transform R Filter / threshol ding
3. 噪声模型局限
一般噪声模型分成两部分:smooth部分(无污染图
像),oscillatory 部分(噪声部分)
局限性
噪声模型并不是最准确的 并不是所有图像都是smooth,图像同样可以包含细节和 结构,这同样是高频成分
2.2 非局部平均去噪
1. 图像先验知识
图像并不是随机组合的一群像素值
更多实例
3 2 1 0 TV=3
1
TV=5
2
3
4
5
6
7
8
9
信号中含 有噪声使 TV值提高
3 2 1 0
1
2
3
4
5
6
7
8
9
二维情况
T V(u) | u( x, y) u( x 1, y) | | u( x, y) u( x, y 1) |
x2 y 2 N M
Co-area formula:
【 619】
2. 为什么要采用TV
降噪是图像处理的基本问题,面临两个互相冲突的要求
平滑噪点 保持细节-边缘、纹理
线性滤波如Gauss卷积最为简虽能保持陡峭边缘,但会清除小于半窗口的图像
细节,视觉效果甚差 Weiner滤波可实现最小均方误差,侧重于抑制噪声,往往
相邻像素之间一般具有高度的相关性 均值去噪?
Gaussian Filter
细节!
1. 图像先验知识 图像并不是随机组合的一群像素值
相邻像素之间一般具有高度的相关性
领域的均值去噪? 领域内相似颜色的均值去噪?
• 双边滤波:非线性的滤波方法,是结合图像的空间邻近 度和像素值相似度的一种折衷处理,同时考虑空域信息 和灰度相似性,达到保边去噪的目的。优点是边缘保存。
2. 组合所有相似的patch
计算方法:
3. 计算3D的Harr小波变换
计算方法:
4. 应用收缩(shrinkage)或者硬阈值、维纳滤波等
计算方法:
5. Harr小波反变换
计算方法:
6. 组合patch形成去噪后的图像(每个patch给一个权
值)
每一个patch都有一个去噪后的估计图像,而NLM中只 是patch中的中心点像素有估计值
什么不是TV
注意,对于任何p>1,下式都不是TV:
| u | p , p 1
若p>1,求上式极小值时对图像有平滑作用,使边缘模糊, 只有当p=1时,仅沿等高线(level line)才有平滑作用,这
就是ROF的最大贡献
参看S. Osher, et al., An iterated regularization method for total variation-based image restoration, Multiscale Model. Simul., 4: 460-489, 2005 【457】
2 2 ux uy dxdy: || u ||1
平滑过度,重建图像时保持细节的能力不足 ROF提出基于L1范数的全变差模型,是对图像处理理论和 方法的重要贡献
3. 范数(Norm)
向量(矩阵)x 的范数满足以下条件:
ax = a · x x+y x + y 若 x = 0,x为零向量
3D grouping
3D transform
Denoised 3D group
多个BM3D估计
R thr
Collaborative filtering R R
Collaborative filtering R thr
计算方法:
1. 对于每一个patch,寻找相似的patch(如计算SSD)
计算方法:
内容提要
2.1 基本概念 2.2 非局部平均去噪(Non-local Means) 2.3 三维块匹配(BM3D) 2.4 全变分去噪(Total Variation ) 2.5 稀疏表示去噪(Sparse Representation)
Indoor – low light
2.1 基本概念
1. 常用噪声模型 加性噪声:加性噪声和图像信号强度不相关 v(i) = u(i) + n(i) 乘性噪声:乘性噪声和图像信号是相关的 v(i) = u(i) × n(i) 椒盐噪声:黑图像上的白点,白图像上的黑点
L2范数(Euclidean)
2 2 || x ||2 : x12 x2 xN
仅满足前两个条件 称为“半范数”- semi-norm
L1范数(Manhattan, Taxicab)
|| x ||1: | xi |
i 1
N
Lp范数
1/ p 定义: p || x || p | xi | i
量化噪声:是由量化过程引起的,解决的最好方法 是最佳量化
=
+
Observation
Scene
Additive Noise
2. 常用去噪算法
空间域:各向异性滤波、邻域滤波(如高斯、中值),等 变换域:傅立叶变换、维纳滤波、多尺度方法(小波为代 表),等 其他方法:脉冲耦合神经网络、主成分分析、学习方法 (SVM)、 Gaussian Scale Mixture ,等
Bilateral Filter 双边滤波
高噪声情况不佳!
1. 图像先验知识
图像并不是随机组合的一群像素值
相邻像素之间一般具有高度的相关性 领域的均值去噪? 领域内相似颜色的均值去噪? 领域内相似纹理的均值去噪?
2. 非局部平均去噪(NLM)
——Buades et al., 2005 (CVPR)
and related problems, Numerische Mathematik, 76: 167-188, 1997 【 1388】
T. F. Chan, S. Osher, and L. Shen, The digital TV filter and nonlinear denoising, IEEE Transactions on Image Processing, 10(2): 231-241, 2001
两个像素之间的相似性,由像素邻域 patch 之间的相似性 决定。通常情况下,相似度的测量是通过欧几里得距离来表示: