(WTR)基于最优压力的CVT多片湿式离合器模糊自适应PID控制
基于最优压力的CVT多片湿式离合器模糊自适应PID控制

[ src] B pligteter o dpv uz I ot l ot l ytm f em l—lew t Abtat yapyn hoy faatefzyPD cnr ,acnr s rt utpa e h i o os e o h i t
cuc f o t uul vr be rnm si ( V )s eeoe , hc e r n s h pi a c agn l o te lt o acni os ai l t s i o C T i d vl d w i dt mie teot l hn igr e f h n y a a sn p h e m u h
维普资讯
汽
车
工
程 20 ( o.0 N . 0 8 V 1 ) o5 3
20 0 8年 ( 3 ) 5期 第 O卷 第
A t oi ni e n uo t eE g er g m v n i
20 05 0 89
基 于最 优 压 力 的 C T多 片 湿 式 离合 器 V 模 糊 自适 应 PD控 制 木 I
lf ft e c u c ie o h l th.
Ke wo ds:CVT;m u t- a e we l c y r lipl t t cut h;a ptv u z D o t o ;o i a e s e da i e f z y PI c n r l ptm lpr s ur
2 C lg A tm beE gneig inU i r t,C a gh n 10 2 ; . . oeeo u oi n ier ,Jl n sy hn cu 3 0 5 l f o l n l e v i 3 C lg Meh n a n uo blE gne n H n nU i rt, h nsa 4 0 8 . ol e e o f ca i l d A m i n i r g, u a nv sy C agh 10 2 c a to e ei e i
模糊自整定PID算法在CVT变量施肥系统中的应用
中图 分 类 号 : ¥ 2 2 3 . 2
文 献标 识码 :A
文章编号 : 1 0 0 0 — 1 7 0 0 ( 2 0 1 3 ) 0 4 — 0 4 6 1 — 0 6
w o u l d i n l f u e n c e f e r t i l i z e r p r e c i s i o n o f Va f a b l e Ra t e F e ti r l i z a t i o n s y s t e m.On t h e b a s i s o f t h e c o n v e n t i o n a l P I D c o n t r o l l e r ,f u z z y P I D c o n t r o l l e r w a s d e s i g n e d f o r t h e e l e c t r o n i c c o n t r o l me c h a n i c a l c o n t i n u o u s l y v a i r a b l e t r a n s mi s s i o n f CV T 1 Va fa b l e Ra t e
模糊 自整定 P I D 算 法在 C VT变量施肥 系统 中的应 用
梁春英 1 , 2 a吕 鹏 , 纪建 伟 , 王 熙
( 1 . 沈 阳农 业 大学 信 息 与 电 气 工程 学 院 , 沈阳 1 1 0 1 6 1 ; 2 . 黑龙 江八 一 农 垦 大 学 a . 信 息技 术 学 院 , b . 工程学院 , 黑龙 江 大庆 1 6 3 3 1 9 ) 摘要 : 针 对 变 量 施 肥 系 统 因土 壤 平 整度 、 机车行进速度 等因素变化 , 导致施肥轮转速不稳定 , 影 响 施 肥 效 果 的问 题 , 在传 统 P I D控 制 器 的基 础 上 , 设 计 了 电控 机 械 无 级 变 速 机 构 ( C V T ) 变 量 施 肥 系 统 模 糊 自整定 P I D控制器。 采 用 MA T I J A B , s i mu ml k仿 真 , 对 比传 统P I D 和模 糊 自整 定 P I D系 统 的 阶跃 信 号 响应 和 脉 冲 干 扰 信 号 响 应 , 结果表 明 : 模 糊 自整 定 P I D控 制 器 在 响应 速 度 、 超 调 量 及 抑 制 干 扰 能 力 等 方 面 均优 于 传 统 P I D, 并 通 过试 验 进 一 步 验 证 控 制 效 果 。 关 键 词 :变 量 施肥 ; 模 糊 自整 定 P I D; MA T L A B仿 真 ; 无 级 变 速
模糊自适应PID控制器在水轮机调节系统中的应用

L u IJn
L ann P m e tr e P0 c D p r eto n hvn n rqe c d l i o e ee ̄i o pn hn ia u p d Soa rl t eat n f H g ' e m k S aig ad Feu nyMo u ̄o P w rG nr o C m ay o C i n n f a
S uh r o rG i, io 7 1 5,C ia o tenP we r Hak u 5 0 0 d hn )
Ab t ac : Ac o d ng t h o i a h r ce n i ai b lt fp r mee s a d t c ra n y sr t c r i o t e n nl ne rc a a tr a d tme v ra iiy o a a t r n he un e t i t
o d l o y r u i u b n g v r i g y t m,t i a e e in n a a t e I c n r l r o f mo e f h d a l t r i e o e n n s se c h s p r d sg s a d p i P D o tol f p v e
p r me e s b s d o u z e s n n ,a d us s Ma lb t i lt h tbi t n o usn s f t e a a t r a e n f z y r a o i g n e ta o smu ae t e sa l y a d r b t e s o h i c ntol r Th smu a in e u t s o o r le . e i l to r s ls h w t t he o tolr ha t c n r le ha g o d n mi a d t a y t t s o d y a c n se d sa e p ro ma e n i v rh o ,ta st n p o e s tme n oh r c n r lpe fr n e a e betr t n e f r nc ,a d t o e s o t r n ii r c s i ,a d t e o to ro ma c r te ha s o t a f ta iina D o tol r tc n me tt e r q ie n s o y r u i u b n e u a i y t m h to r d to lPI c n r le .I a e h e u r me t f h d a lc t r i e r g l t ng s se frpa a t rc n r 1 o r mee o to. Ke wor : f z y d p i e;PI y ds u z a a tv D;c n r le ; h d a lc t r i e e ltn y t m ;p o to lr y r u i u b n r g ai g s se u ump d— t r g e so a e
模糊自适应PID控制器在型材冷弯机送料机构的应用
( aut fEet meh nclE g er g G a g o g U ies y f T e o g ,u n zo 5 0 9 , C ia F cl o lc o c a ia ni ei , u n d n nvri o en l y a gh u 10 0 hn ) y r n n t o G
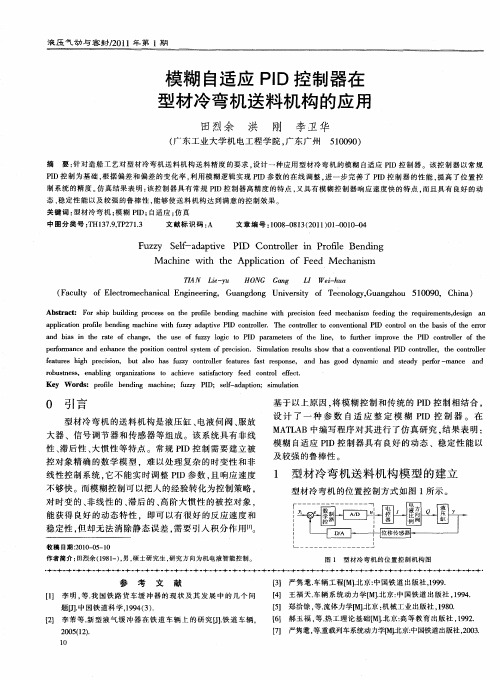
Ab t a t F r s i u l i g p o e s o h r f e b n i g ma h n i r cso e d me h n s f e i g t e r q ie n s e i n l sr c : o h p b i n r c s n t e p o l e d n c i e w t p e iin fe c a im e d n h e u r me t, sg al d i h d a p ia in p o l e d n c i e w t u z d p i e P D c n r l r T e c n r l r t o v n in lP D c n r lo h a i f t e e r r p l t r f e b n i g ma h n i f zy a a t I o t l . h o tol o c n e t a I o t n t e b ss o h ro c o i h v oe e o o
液 压 气 - 与 密 封 / 01 z A - 2 1年 第 1期
模糊 自适应 P 制器在 l D控 型材冷弯机送料机构 的应 用
田烈余 洪 刚 李 卫 华
( 东工业 大学 机 电工程 学院 , 东广 州 5 0 9 ) 广 广 1 0 0
自适应模糊PID控制在陶瓷压机布料系统液压调速中的应用
钟 勤 , 童 军 郭
(. 西 陶 瓷 工 艺 美 术 职 业 技 术 学 院, 德 镇 1江 景 3 30 : 3 0 1
2 景 德 镇 陶 瓷 学 院 机 械 电子 工 程 学 院 , 德 镇 . 景
2 陶瓷压 机 布 料 系统 液压 调速
法实现这样 的过程精确控制 , 不能实时调整 P D参数 I 且响 的均匀性 ,料车的速度转换也 由采用传统 的液压元件发展 应速度不够快 。 而模糊控制对数学模型的依赖性弱 , 不需要 为采 用 比例 电磁 方 向阀 ,由角 度 编 码 器或 转 速 传 感 器检 测
关键词 : 压调速 ; 糊控制 ; 液 模 自适 应模 糊 P D控 制 ; 真 I 仿
相结合 , 设计 了一种 自适应模糊 P D I 控制器。该 自适应模糊
P D控制器的设计分 为两部 分 , I 简单方便 , 它在偏差 { l E 较
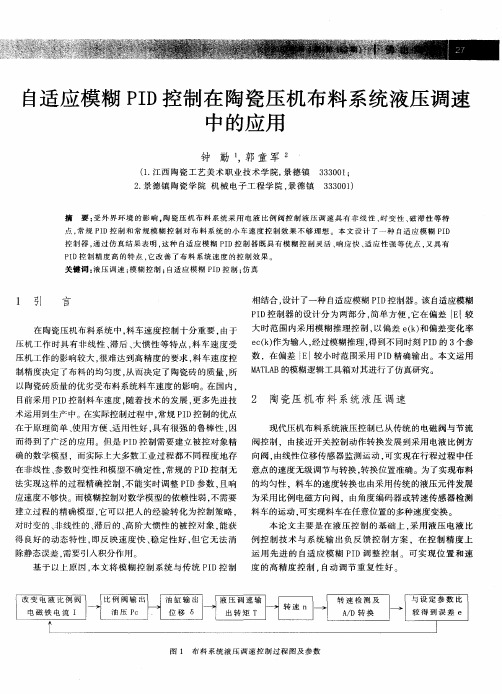
以 () 在 陶瓷 压 机布 料 系统 中 , 车 速度 控 制 十 分 重 要 . 于 大 时 范 围 内采 用 模 糊 推 理 控 制 , 偏 差 ek 和 偏 差 变 化 率 料 由 ck作 经过 模 糊推 理 , 到 不 同时 刻 P D 3 参 得 I的 个 压机 工 作 时 具 有 非 线 性 、 后 、 惯 性 等 特 点 , 车 速 度 受 e () 为输 入 , 滞 大 料
建立 过 程 的 精确 模 型 . 可 以把 人 的 经 验转 化 为控 制 策 略 . 料 车 的运 动 , 它 可实 现料 车在 任 意位 置 的多 种 速度 变换 。 对 时变 的 、 线 性 的 、 后 的 、 阶 大惯 性 的被 控 对 象 。 获 非 滞 高 能 本 论 文 主要 是 在 液 压 控 制 的 基 础 上 . 用 液 压 电液 比 采 运 用 先 进 的 自适 应 模 糊 P D调 整 控 制 。可 实 现 位 置 和 速 I 得 良好 的 动态 特性 , 即反 映 速 度 快 、 定 性 好 , 它 无 法 消 例 控 制 技 术 与 系 统 输 出负 反 馈 控 制 方 案 .在 控 制 精 度 上 稳 但
基于模糊自适应PID的直驱式容积控制电液伺服系统性能的研究

建筑科技大学 ,0 2 20 . [ ] 马玉 , 3 谷立臣. 基于 电流信号的液压设备状态监测技术研
作 者简介 : 秦二卫 (9 5 )男 , 18 一 , 河南郑州人 , 硕士研究生 , 主 要从事直驱式 电液伺服系统的研究开发工作 。
算 机 应 用 技 术 ,0 6 3 ( 1 :5— 7 20 ,3 1 ) 3 3 .
[ ] 余佑 国, 国芳 , A Sm仿真 技术及 其在 液压 系统 7 龚 等. ME i
中的应用 [ ] 液压气动与密封 ,0 5 ( ) 2 J. 20 ,3 :8—3 . 1
究[ ] 液压与气动 ,05 3 ( ) J. 2 0 ,0 7 . [ ] 王益群 , 4 张伟 . 流体 传动及控 制技 术 的评 述 [ ] 机 械工 J.
Q N E -e , I u — n , I N i a, U N h n I r i LU Jnl g JA G J— i H A G Z e g w o h
( 哈尔 滨 工 业 大 学 , 龙 江 哈 尔 滨 黑 100 ) 50 1
摘
要: 针对 直驱 式容积控 制 电液 伺服 系统 的大时滞 、 线性 等 因素制 定 了模 糊 自适 应 PD控 制 器 , 非 I 并
前 言
滞、 时变 系统性 能优越 的模糊 自适 应控制 , 将其 与传统 PD结合起 来构 成 模糊 自适 应 PD控 制器 , I I 利用 模 糊
控 制在线 整定 PD控制 器参 数 , 控 制器 既 具有 模 糊 I 使 控 制灵活 且适用 性强 的优点 又具有传 统 PD控制精 度 I 高的优 点 , 实现 了 良好 的控制 效果 J 。
基于自适应模糊PID控制的水轮机调节系统
及 其对 电力 系统 自动 控 制 要 求 的提 高 ,对 其 控 制 品 质 提 出 了更 高 的要求 。水 轮机 的惯 性一 般 比较大 而且 容 易 产生 “水 锤 ”,传 统 的 PID控 制 器 易 出现 超 调 量 大 、 波 动频 繁 、摆 动 时间长 和调 节“迟 钝 ”等现象 。而模 糊 PID智 能控 制器 能在 线 自整定 PID控 制 器 的 系数 , 提 高水 轮机 控制 系统 的 自适 应性 和鲁 棒 性 ,上 述 问 题 也 会 迎 刃 而 解 。
好 的 跟 随 性 能 ,稳 态精 度 高 ,超调 量 明 显较 小 ,具 有 较 强 的 自适 应 性 和 鲁棒 性 能 。
关 键 词 :有 功 功 率 ;模 糊控 制 ;自适 应 PID;水轮 机
中 图 法 分 类 号 :TV734.1
文 献 标 志 码 :A
DOI:10.16232/j.cnki.1001—4179.2016.04.018
收 稿 日期 :2015—07—23 作 者 简 介 :万 瑞 文 ,男 ,硕 士研 究 生 ,研 究 方 向 为 新 型 电气 传 动 计 算 机 控 制 及 应 用 。E—mail:1020483583@ qq.cor n
80
人 民 长 江
2016丘
状 态下 ,机组 按控制 系 统 的 静态 特 性 曲线对 功 率 和 频 率 进行调 节 ¨ ” ,改变 |I}值 即可 改变 静态特 性 曲线 的 斜 率 ¨ 。该 系 统 由频 率 和 功 率 反馈 系 统 构 成 ,将 频 率 和功率 的净输 入值 叠加作 为模 糊 自适应 PID的输 入 ,以此来控 制机 液 随 动 系统 、引 水 系 统 ,通过 控 制 导 叶位置来 调 节水 轮机 的 转速 ,从 而 实 现 发 电机 的频 率 稳 定 和功率 因数 稳定 。
基于模糊自适应PID的开关磁阻电机滞环脉宽调制直接瞬时转矩控制

2019,46 ( 1)
控制与应用技术EMCA
通过改变控制策略可以优化输出转矩。文献 [8]首次将变结构控制应用于 SRM 控制中,无须 事先掌握电机的特性数据,将转矩脉动看做系统 干扰,非线 性 看 作 增 益 偏 差,通 过 系 统 控 制 减 小 SRM 的转矩脉动。文献[6,9-11]研究了 SRM 的 静态矩角特性,根据转矩分配函数( TSF) 的特性, 优化相关系统设置,实现在线调整,利用加权函数 等方法实现转矩脉动的抑制。文献[4,12 - 13]将 PI 和 BP 神经网络等运用到直接转矩控制器上完 成电机的直接转矩控制。
CHENG Yong, CAO Xiaoxiao ( College of Electrical and Control Engineering,Xi'an University of Science and Technology,
Xi'an 710054,China)
Abstract: Switched reluctance motor ( SRM) had the characteristics of torque ripple. A direct instantaneous torque control strategy combining hysteresis control and pulse width modulation ( PWM) was proposed. Based on the analyses on the mechanism of large fluctuations in torque during control process,different control methods were formulated for single-phase and commutation zones. Considering the output characteristics of torque under different conditions,the PWM equivalent strategy was introduced into the hysteresis limit interval to optimize the torque control effect. Fuzzy adaptive PID controller was added to improve the response performance of the system. The simulation results showed that the control strategy had a fast response and could suppress the torque ripple of the SRM effectively.
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2008年(第30卷)第5期汽 车 工 程Aut omotive Engineering2008(Vol .30)No .52008095基于最优压力的C VT 多片湿式离合器模糊自适应P ID 控制33湖南省科技计划重点项目(05GK2007)资助。
原稿收到日期为2007年4月24日,修改稿收到日期为2007年10月12日。
薛殿伦1,冯显武1,郑联珠2,曹 成3(11湖南大学,汽车车身先进设计制造国家重点实验室,长沙 410082; 21吉林大学汽车工程学院,长春 130025;31湖南大学机械与汽车工程学院,长沙 410082)[摘要] 利用模糊自适应P I D 控制理论和方法设计了无级变速器湿式离合器控制系统,控制系统依据最优理论方法确定在不同工况下湿式离合器摩擦片间最优的压力变化规律,对离合器的结合与分离进行控制。
台架和整车试验结果表明,相对原来压力按线性变化的P I D 控制,新的控制方法能更好地适应驾驶员的起步意图和路况,较好地解决了湿式离合器起步时接合平稳性和使用寿命等问题。
关键词:无级变速器;多片湿式离合器;模糊自适应P I D 控制;最优压力The Fuzzy Self 2adap tive P I D Control of CVT πs Multi p lateW et Clutch Based on the Op timal PressureXue D i a n lun 1,Feng X i a nwu 1,Zheng L i a nzhu 2&Cao Cheng311Hunan U niversity,S tate Key Laboratory of A dvanced D esign and M anufacturing for V ehicle B ody,Changsha 410082;21College of A uto m obile Engineering,J ilin U niversity,Changchun 130025;31College of M echanical and A uto m obile Engineering,Hunan U niversity,Changsha 410082[Abstract] By app lying the theory of adap tive fuzzy P I D contr ol,a contr ol syste m for the multi 2p late wet clutch of a continuously variable trans m issi on (CVT )is devel oped,which deter m ines the op ti m al changing rule of the p ressure bet w een the fricti on disks f or contr olling the engage ment and disengagement of the clutch at different work 2ing conditi ons based on op ti m al theory .The results of bench test and comp lete vehicle test show that compared with original P I D contr ol with the p ressure changing al ong an oblique line,the ne w contr ol method can better res pond t o the driver πs intenti on and the r oad conditi ons,and hence i m p r ove the engage ment s moothness in starting and service life of the clutch .Keywords:CVT;m ulti 2pl a te wet clutch;adapti ve fuzzy P I D con trol ;opti m a l pressure前言无级变速传动装置(continuously variable trans 2m issi on,CVT )是汽车的理想传动装置,能使汽车在行驶过程中根据行驶工况实现速比连续变化,使汽车获得最佳的燃油经济性和动力性,降低排放[1]。
CVT 控制是开发该装置的关键技术,而离合器的控制是CVT 三大核心控制问题之一,尤其以起步时离合器控制最困难。
目前开发的CVT 常用的起步装置主要有电磁离合器、液力变矩器和多片湿式离合器3种,多片湿式离合器以其结构简单、布置方便、控制容易、成本低而著称,近年来在CVT 上得到了广泛的应用。
离合器控制目标是提高起步过程中离合器接合的平稳性,延长离合器使用寿命,减小发动机转速的波动,降低噪声和排放,提高经济性[2]。
目前对湿式离合器的控制主要采用基于线性压力的P I D 控2008(Vol .30)No .5薛殿伦,等:基于最优压力的CVT 多片湿式离合器模糊自适应P I D 控制・425 ・图1 湿式离合器片间压力的线性控制制[3-5],如图1所示,由于湿式离合器自身特点,其参数随着环境和时间而变化,因此确定控制过程中离合器摩擦片间初始压力和压力变化率十分困难,模糊自适应P I D 控制将模糊控制与P I D 控制结合起来,既保持了P I D 控制器结构简单、适用性强等优点,又通过模糊控制调整P I D 控制器的参数,以适应被控对象特性的变化,增强控制器的自适应能力,还综合考虑驾驶员以及外界道路等因素,对提高汽车起步的快速性和平顺性有着重要的意义。
1 湿式离合器111 结构原理多片湿式离合器的结构原理如图2所示,它主要由前进起步离合器、倒挡制动器、液压执行机构和实现倒挡功能的双行星齿轮机构组成[6]。
图2 多片湿式离合器结构图通过控制液压系统的油路使液压油推动活塞控制湿式离合器主动片与从动片的接合与分离,实现湿式离合器的接合与分离。
112 离合器接合过程动力学模型离合器接合过程可简化为如图3所示模型[7]。
图3 离合器接合过程示意图由此可得离合器主、从动盘动力学方程为I e ω・e +B e ωe =T e -T cl(主动盘)I p ω・p +B p ωp =ηT cl -T l(从动盘)(1)式中ωe 、ωp 分别为离合器主、从动盘角速度;B e 、B p分别为主、从动盘等效阻尼系数;I e 为离合器主动盘(发动机及飞轮)的转动惯量;I p 为离合器从动盘的转动惯量(指变速器、前后车轮及汽车平移质量等效到离合器输出轴上的转动惯量);T cl 为离合器传递的摩擦转矩;T e 为发动机动态输出转矩;T l 为离合器输出轴上的阻力矩;η为汽车传动系的效率;F ncl 为离合器主从动盘间压力。
113 离合器接合过程最优压力的确定汽车起步时,对离合器有2项基本要求:(1)要求接合平顺、柔和;(2)使用寿命长。
研究表明,汽车起步过程中冲击度j 主要与离合器主从动盘间压力变化率d F ncl /d t 有关,滑磨功W 与离合器主从动盘间压力F ncl 大小有关,因此汽车起步过程中合理地控制主、从动盘间压力F ncl 及d F ncl /d t 就可实现汽车平稳起步,满足平顺性要求,且能有效控制滑磨功W 的大小[8]。
根据离合器设计要求,为提高离合器起步过程接合平稳性,延长离合器使用寿命,建立二次型综合性能指标函数J [9]为J =12∫t f[X T Q X +ru 2+c ]d t(2)式中Q 为状态向量的权重;r 为控制量的权重;c 为时间量的权重;t f 为离合器接合时间。
依据最优理论当J 取最小值时所得的控制u 3(t )为最优控制,通过求解离合器结合过程状态方程可以得到最优迹线,该曲线也就是离合器接合过程中摩擦盘间压力变化曲线F 3ncl (t )。
因此离合器接合过程中主从动摩擦盘间最优压力的求解是属于包含各种边界约束下的最优决策问题。
将不同的发动机节气门开度及其变化率所对应的一系列离散值进行拟合,根据对各种工况下离合器接合过程最优压力分析可知,可用如下拟合公式・426 ・汽 车 工 程2008年(第30卷)第5期F 3ncl (t )=a +b e-t+ct e-t(3)来计算某一工况下最优压力,实时控制时F 3ncl (t )是离线计算好的,起步时控制系统根据离合器接合时间t f 、离合器开始结合时的发动机转速n es 、输入转矩T e 和阻力矩T l 查询存储在内存中的数据表格,可以得到一组系数a 、b 、c ,对表中未列出的数值可以通过插值确定,从而确定不同工况下离合器摩擦盘间压力变化曲线。
图4中曲线1~4为直接计算与公式拟合的比较,可见实际计算数值与采用式(3)计算数值吻合很好。
曲线5为通过对曲线1、4和曲线2、3的系数a 、b 、c 进行插值后的结果与直接计算结果的比较。
图4 直接计算值与拟合值及插值的比较2 模糊自适应P I D 控制系统211 模糊原理常规P I D 控制器具有结构简单、使用方便、可靠性高、应用广泛、鲁棒性强等优点,但其参数是在某一特定条件下整定完成的,所以对于大延迟与高阶系统,一组P I D 参数难以适应各种不同的工作条件。
模糊自适应P I D 控制器是在常规P I D 控制器基础上,通过计算当前输入的误差和误差变化率,利用工程技术人员的技术知识和实际经验,形成P I D 参数的模糊控制规则,进行模糊推理,对比例增益k p 、积分增益k i 、微分增益k d 进行整定,增强控制器的自适应能力。
控制模块以离合器接合过程中最优压力作为参考输入,与离合器结合过程中实际压力进行比较,根据压力偏差e 及压力偏差变化率ec 对离合器接合过程进行控制,以参数k p 、k i 、k d 的变化量Δk p 、Δk i 、Δk d 作为输出变量,它们的离散论域为{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6},在离散论域内以模糊子集{NB ,NM ,N S,ZO,PS,P M ,PB }来描述误差e 、误差变化ec 以及变化量Δk p 、Δk i 、Δk d ,分别代表负大、负中、负小、零、正小、正中、正大。
212 模糊控制规则根据工程技术人员的总结和实际操作经验,得到Δk p 、Δk i 、Δk d 的模糊控制规则如表1~表3所示。
表1 Δk p 的模糊规则ec eNB NM N S ZO PS P M PB NB NB NB NM NM N S ZO ZO NM NB NM NM NS N S PS PS NS NM NM N S NS ZO PS P M ZO NM NS ZO ZO PS PS P M PS N S NS ZO PS PS P M P M P M N S ZO PS PS P M P M PB PBZOZOPSP MP MPBPB表2 Δk i 的模糊规则ec eNB NM N S ZO PS P M PB NB NB NB PS PB PS ZO NM NM NB NM PS PB PS ZO NM NS NB NM P M P M P M NS NM ZONM NS P M PS P M NS NM PS NM NS P M P M P M NM NB P M NM ZO PS PB PS NM NB PBNMZOPSPBPSNBNB表3 Δk d 的模糊规则ec eNB NM N S ZO PS P M PB NB PB PB P M P M PS PS NS NM PB P M P M PS PS ZO NM NS P M P M PS PS ZO NS NM ZO P M PS PS ZO N S NS NM PS PS PS ZO NS N S NM NB P M PS ZO N S NS NM NM NB PBPSNSN SNMNMNBNB213 模糊推理与解模糊采用Ma mdani 方法进行模糊推理,用重心法实现解模糊,通过查询模糊控制表将控制量变成精确输出量[10]。