UHF Cruiser模块
UHF常用芯片汇总

UHF常用芯片汇总以下是一些常用的UHF(Ultra High Frequency)芯片的汇总,这些芯片主要用于无线通信和RFID(Radio Frequency Identification)应用。
1. Impinj Monza系列Impinj Monza系列芯片是全球最著名的UHF RFID芯片之一、这个系列提供了高性能、高度集成、低功耗的解决方案。
Monza系列的芯片通常用于物联网、零售、物流和库存管理等领域。
2.NXPUCODE系列NXPUCODE系列芯片是业界最常见的UHFRFID芯片之一、这个系列的芯片具有卓越的性能和可靠性,支持多协议,能够满足不同应用的需求。
UCODE芯片广泛应用于零售、物流、运输和电子票务等领域。
3. Alien Higgs系列Alien Higgs系列芯片是另一个广受欢迎的UHF RFID芯片。
这个系列的芯片采用先进的射频和数字电路技术,具有高度集成、低功耗和高性能的特点。
Higgs芯片常用于零售、制造业、医疗和物流等领域。
4. STMicroelectronics ST25系列ST25系列芯片由STMicroelectronics推出,是一款多功能的UHF RFID芯片。
该系列的芯片具有高度集成、低功耗和优秀性能等特点。
ST25系列芯片广泛应用于物联网、安全识别、物流和库存管理等领域。
5. TI Tag-it系列TI Tag-it系列芯片是德州仪器(Texas Instruments)推出的UHF RFID芯片。
这个系列的芯片具有高度集成、低功耗和高性能的特点,能够满足不同应用领域的需求。
Tag-it芯片常用于物流、库存管理和电子车牌等领域。
6. Smartrac Frog系列7. SensThys SensArray系列SensThys SensArray系列芯片是一种集成射频前端和数字电路的UHF RFID芯片。
这个系列的芯片具有高度灵活性和可扩展性,适用于不同射频环境下的部署和应用。
CRUISE_M_系列教程_冷却系统建模(基础)v1

CRUISE M冷却系统建模教程(基础)说明A VL 先进模拟技术部门于2015 年10 月正式发布了车辆系统级仿真平台软件A VL CRUISE M,旨在为车辆及子系统的开发提供助力。
CRUISE M 仿真平台专门设计用于车辆多物理系统仿真,和高度灵活、多层次的建模方法相结合,同时集成了第三方工具的标准接口FMI,无缝地将发动机热力循环、尾气净化装置系统、冷却和润滑系统、车辆传动系统以及控制系统集成到统一的仿真平台上。
为了帮助工程师尽快了解和掌握CRUISE M软件,我们制作了CRUISE M系列学习教程。
根据CRUISE M对应的模块,分为实时发动机建模、车辆与传动系统建模、冷却与润滑系统建模、发动机尾气后处理仿真等不同部分。
同时,每一模块的教程又分为基础教程和专题教程,以满足不同领域和不同阶段的工程需要。
本教程的目的是帮助用户熟悉软件的基本操作,同时初步了解发动机冷却系统建模方法,所搭建的模型仅能计算不同回路的流量和压降,并不能计算换热。
如需详细了解具体参数的含义、模型背后的计算公式等,请查阅CRUISE M Users Guide 或直接与我们联系。
本教程作为CRUISE M Flow的基础培训教程,基于CRUISE M v2015版本制作而成。
建模过程中需要导入的文件和阶段性完成模型位于(……\Tutorial\Cooling\)文件目录下。
软件学习过程中遇到任何问题,请与我们联系(CRUISE_support_china@),以获帮助。
教程难免有不足之处,欢迎指正以及改进意见!本教程版权归A VL公司所有,未经允许,请勿传播。
A VL 先进模拟技术部ast.china@2016年5月31日目录第1章CRUISE M Flow简介 (1)第2章冷却系统模型搭建 (2)2.1 冷却水套(Cooling jacket) (3)2.2 散热器支路(Radiator) (6)2.3 小循环支路(Radiator Bypass) (7)2.4 乘员舱支路(Cabin Heater) (8)2.5 涡轮增压器冷却支路(Turbocharger) (9)2.6 润滑油冷却器(Oil Cooler) (9)2.7 控制单元 (10)第3章模型参数输入 (11)3.1 水泵(Pump) (11)3.2 节点(CL Node) (13)3.3 液路管道(Liquid Flow Pipes) (14)3.4 压力损失(Discrete Loss) (15)3.5 阀(Valve) (16)3.6 弯管(Bend) (16)3.7 膨胀水箱(Expansion Chamber) (17)3.8 小孔(Orifice) (18)3.9 渐变管(Diffuser) (18)3.10 突变管(Expansion Contraction) (19)3.11 液体换热器(Liquid Heat Exchanger) (19)3.12 壁面(Solid Wall) (21)3.13 其他元件参数设置 (23)3.14 数据总线连接 (24)第4章计算任务 (25)4.1 流体回路设置(Circuit) (25)4.2 计算任务设置 (26)第5章算例及运行设置 (28)第6章计算结果后处理 (32)第1章CRUISE M Flow简介A VL CRUISE M Flow 模块是车辆能量管理系统的重要组成部分,能够建立冷却系统、润滑系统和传热网络,详细描述热量的产生和传递过程,实现关键零部件的冷却和加热。
UHF跳频增程电台说明书——【无人机 零件及设备】
一、名词解释: (3)二、特性介绍: (4)1. 通用特性 (4)2. 开发中的其他特性(当前固件还未支持) (4)3. 地面电台: (4)4. 机载电台: (5)三、设备模块和模块接口介绍: (6)1. 地面电台: (6)2. 机载电台 (6)3. 机载电台的天线和地网 (7)4. 舵机板 (9)5. 蓝牙板 (9)四、功能选项设置、指示灯含义 (11)1. 工作模式下指示灯状态含义: (11)2. 如何对码: (11)3. 选项设置模式下指示灯状态含义: (11)4. 地面电台设置选项: (12)5. 机载电台设置选项: (12)五、遥控信号接入地面电台的方式: (13)1. 遥控器的高频头接口接入 (13)ØFS9X、JR、X9D等JR高频头接口的遥控器 (13)ØFUTABA、天地飞等FUTABA高频头接口的遥控器 (13)2. 遥控器的模拟口接入 (14)ØFUTABA方口 (14)Ø天7、ESKY等键盘口 (14)1ØJR等音频插头 (14)3. 接收机转接 (14)Ø普通PWM转接 (15)Ø混合PPM转接 (15)ØSBUS转接 (16)4. 头追接入 (16)六、地面电台接地面站、用升级软件升级固件: (16)1. USB-TTL板: (16)2. 蓝牙模块: (17)七、机载电台接飞控电台接口: (17)1. H飞控 (17)2. APM飞控 (18)八、机载电台接舵机板,输出PWM舵机信号: (18)九、实测距离 (19)1一、名词解释:PWM:舵机信号(接收机输出,舵机输入)PPM:混合PPM信号,一般由1-8通道混合而成,常用于模拟口、高频头、头追的输出。
通道顺序分为:1、FUTABA通道顺序(1副翼、2升降、3油门)2、JR通道顺序的 1油门、2副翼、3升降SBUS:FUTABA及兼容接收机(FRSKY)输出的总线格式,单条舵机线可传输16个模拟通道和2个开关通道。
黑翼飞行模拟器用户手册说明书

IntroductionThe Blackwing BW 635RG is an ultralight two-seater aeroplane designed for recreational flying and training purposes. It features a sleek and modern design, with a composite airframe and a low-wing configuration. The Blackwing has a cruising speed of up to 120 knots and a range of approximately 700 nautical miles, making it suitable for both short and long-distance flights. The cockpit is equipped with state-of-the-art avionics, including a glass cockpit display and an autopilot system. The Blackwing is also known for its superior handling and stability, making it a popular choice among flying enthusiasts and flight schools. The BW 635RG is powered by the venerable Rotax 915 iS engine.Development Credits:Mal Cartwright Product LeadRuss White3D Modelling, Interior and Exterior TexturingJack Lavigne IntegrationHarry Stringer AnimationPropAir Flight Model and SystemsJordan Gough ManualWith special thanks to our Beta Testers:Rob Abernathy John BurgessNick Cooper John DowMatt McGee Darryl WightmanTable of ContentsIntroduction (2)Development Credits: (2)With special thanks to our Beta Testers: (2)Table of Contents (3)Notes on Hardware (4)Overview (5)Aircraft Limitations (6)Airspeed Limitations (6)Engine Limitations (6)Operating Conditions (6)Fuel (7)Other Limitations (7)Emergency Procedures (8)Engine Failure on the Take-off Roll (8)Engine Failure after Take-off (8)Glide Performance (8)Emergency Landing (9)Spin Recovery (9)Normal Procedures (10)Before Starting Engine (10)Starting Engine (10)Before Taxiing (11)Taxiing (11)Engine Runup (11)Before Take-off (11)Take-Off (12)Initial Climb (12)Cruise Climb (12)Cruise (12)Landing (13)Balked Landing (13)After Landing (13)Securing Aircraft (14)Basic Performance (15)Stall Speeds (15)Take-Off Performance (15)Landing Performance (16)Systems Description (17)Instrument Panel Layout (17)Switch Logic and Electrical System (18)Master Switch (18)Fuel Pump Switch (19)LAND/TAXI Switch (19)Strobe/Nav Switch (19)Electrical System Diagram (20)Engine (21)Propeller (21)Fuel (21)Notes on HardwareDue to the unusual 3-position switches in this aircraft, conventional hardware 2position toggle switches (eg. strobe or nav light switches) cannot be translated tothe single 3-position switch which combine these.Additionally, as this aircraft utilises a single level power control (throttle), conventional throttle/prop/mixture hardware may interfere with the function of this system, and not work as intended. It is recommended to place your propeller and mixture levers in the IDLE position, and not move them while the engine is running.OverviewThe Orbx BW 635RG has been developed using official documentation and Computer Aided Design (CAD) resources from Blackwing Sweden. As a result, the aeroplane has been created through masterful modelling, texturing, systems integration, and flight model development.Figure 1 – Aircraft 3-viewAircraft DimensionsLength 6.6m Height 2.2m Wingspan8.4mWeightsBasic Empty Weight 375kg Maximum Take-off Weight 600kg Maximum Fuel Capacity (Litres)130LThe content in this manual and the operation of the BW 635RG in Microsoft Flight Simulator strictly must not be used as reference material in any form for operating the real aircraft.Aircraft LimitationsAirspeed LimitationsAirspeed Description Airspeed (KIAS) RemarksVne Never Exceed Speed 157 Must not exceed this speed in any operation.Va Manoeuvring Speed 109 If full or abrupt control deflection is made, the airframe may be overstressed.Vfe1 Max flap extended speed20 degrees90 Maximum speed for flaps 20°Vfe2 Max flap extended speed35-45 degrees 70 Maximum speed for flaps 35-45°Vlo Maximum landing gearoperating speed 70Do not extended or retract the landing gearabove this speed.Vle Maximum landing gear extended speed 90 Do not exceed this speed with the landing gearalready down.Vs0 Stall speed flaps/gearextended 38 Stall speed with gear down/flaps >0° and in level flight at MTOWVs1 Stall speed clean 49 Stall speed flaps retracted, gear up and in level flight at MTOWEngine LimitationsEngineEngine Manufacturer Rotax Engine Model Rotax 915 iSMaximum Power Take-off (Max 5 min.) 141 hp Continuous 135 hpMaximum RPM Take-off (Max 5 min.) 5800 Continuous 5500Critical Altitude 15000ft AMSL Maximum OperatingAltitude23000ft AMSL Operating ConditionsAerobatic manoeuvres, flight in IFR conditionsand flights in icing conditions are prohibited inthis aircraft.FuelFuel TanksLeft Right Litres US Gal Litres US GalTotal Fuel in Tank 67.5 17.8 62.5 16.5Unusable Fuel 2.5 0.7 2.5 0.7 Total Useable Fuel in Tanks 66.5 17.6 61.5 16.2Other LimitationsMaximum demonstrated crosswind for the BW 635RG is 20 knots.Emergency ProceduresNote: The following procedures have been modified to be suitable for simulation. It does not cover emergencies that are a) not simulated and b) not reasonable. Checklist items from the real procedures have been omitted and these procedures must not under any circumstances be used for training purposes.Engine Failure on the Take-off RollThrottle: IDLEIgnition: OFFFuel Pump: MAIN (DOWN POS)Brakes: APPLYWhen stopped: SECURE AIRCRAFTEngine Failure after Take-offNose: IMMEDIATELY LOWERAirspeed: 65 KNOTSLanding Area: DETERMINE WITHIN 30° OF NOSEFlaps: USE AS REQUIREDLanding Gear: USE DESCRETIONFuel Selector: OFFIgnition: OFFMaster Switch: OFFGlide PerformanceThe BW 635RG, the approximate performance for a glide is 65 KIAS which willgive approximately a 545ft/min rate of descent in the clean configuration.Glide performance will degrade significantly on extension of flaps and landinggear.Emergency LandingAirspeed: 65 KIASField: PICK BEST OPTIONLanding Gear: USE DISCRETION DEPENDING ON FIELD TYPEFlaps: AS REQUIREDFuel Selector: OFFIgnition: OFFFuel Pump: MAIN (down)Master Switch: OFF BEFORE LANDINGSpin RecoveryThrottle: IDLEControl Stick: AILERON NEUTRALRudder: FULL OPPOSITE TO DIRECTION OF ROTATIONControl Stick: POSITIVELY FORWARD OF NEUTRALRudder: NEUTRAL WHEN ROTATION STOPSControl Stick: SMOOTHLY PULL OUT OF DIVEWARNING:INTENTIONAL SPINS ARE NOT APPROVED INTHIS AIRCRAFT.Normal ProceduresNote: The pre-flight inspection portion of the normal procedures has been removed due to impracticality in the simulator.Before Starting EngineIgnition: OFFMaster Switch: OFF (down)Backup Battery: OFF/AUTO (down)Landing Gear Lever: DOWNCircuit Breakers: INCanopy CLOSED (CLICKING THE LATCHON THE INSIDE LEFT SIDEWALL.) Starting EngineParking Brake: HOLD TOE BRAKES AND ENGAGE PARKINGBRAKEMaster Switch: ENGINE START (middle position)Fuel Selector: SETFuel Gauge: CHECKFuel Pump: BOTH (up)Ignition: BOTHNav Lights: STROBE (middle position)Throttle: SET ½-1 INCH OPENIgnition: STARTOil Pressure: GREEN WITHIN 10 SECWarnings: NONEBefore TaxiingMaster Switch: NORMAL OPERATION (up)Altimeter: SETAvionics: SETParking Brake: DISENGAGETaxiingInstruments: CHECKED (COMPASS/HSI/BALL/ATT) Engine RunupParking Brake: ENGAGERPM: 2500 RPMFuel Pump: CYCLE, CHECK FUEL PRESSUREIdle: CHECK IDLE 1800 +/- 100 RPM Before Take-offCanopy: CLOSED AND LOCKEDFlaps: 1 STAGE (20°)Elevator Trim: SET FOR TAKE-OFFEngine Instruments: NORMALLanding Light: ON (up)Controls: FULL FREE AND CORRECT MOVEMENTParking Brake: DISENGAGETake-OffThrottle: FULLControls: NEUTRAL45 Knots: ROTATEAccelerate: NOSE ON HORIZON, ACCEL TO 80 KIASPositive Rate of Climb: GEAR UPLanding Light: OFF (down)Flaps: RETRACT ABOVE 500’ AGLInitial ClimbThrottle: MAX CONTINUOUS (5500 RPM)Airspeed: 90 KIASFuel Pump: MAIN (down) ABOVE 500’ AGL Cruise ClimbThrottle: MAX CONTINUOUS (5500 RPM)Airspeed: 130 KIASCruiseThrottle: 55-75% PowerAirspeed: 120-157 KIAS (<130 KIAS IN TURB)LandingFuel: QTY CHECKEDFuel Selector: FULLEST TANKFuel Pump: BOTH (up position)Airspeed: 90 KIASFlaps: EXTEND FLAP 1 <90 KIASDownwind Airspeed: 65 KIASLanding Gear: DOWN @ 65 KIAS; CHECK 3 GREENLanding Light: ON (up position)Base Leg: EXTEND FLAP 2 < 65 KIASFinal Approach Airspeed: 60 KIASBalked LandingThrottle: SMOOTHLY INCREASEAirspeed: 60 KIASTrim: COURSE TRIM TO RELIEVE PRESSUREFlaps: RETRACT TO POSITION 1 (20°)Gear: UPTrim: TRIM FOR CLIMBAfter LandingFlaps: RETRACTExterior Lights: AS REQ’DFuel Pump: MAIN (down)Securing AircraftParking Brake: ENGAGEDThrottle: IDLESwitches: ALL OFF EXCEPT ACL AND MASTERIgnition: OFFNav Lights: OFF (down)Master Switch: OFFBasic PerformanceStall SpeedsMTOW 600kg | CG 32% MAC | Power Idle | Level FlightFlap Position Stall Speed (KIAS) 0° 49 20° 44 35° 39 45°38Take-Off PerformanceMTOW | ISA CONDITIONS | SEA LEVEL | FLAPS 1 (20°) | MTOW (600kg)Cruise PerformanceRunway Surface Ground RollOver 50ft Obstacleft mft mPaved Runway328 100 656 200 Unpaved (Grass) Runway 361110689208Pressure Altitude Power (%) TAS Fuel Flow LPH MAP (inHg) Endurance(hr)Range (nm) 500055 161 19.7 30 5.8 941 65 170 23.3 34.1 4.9 827 7517826.937.44.1738Landing PerformanceMTOW | ISA CONDITIONS | FLAPS 2 (35°) | MTOW (600kg) | Speed 1.3 x VsoRunway Surface Ground Roll Over 50ft Obstacle ft m ft mPaved Runway 525 160 951 290 Unpaved (Grass) Runway 558 170 984 300Systems Description Instrument Panel LayoutSwitch Logic and Electrical SystemThe electrical switches in the BW 635RG are 3-position switches. These are generally known as “DOWN”, “MIDDLE” and “UP”. They are briefly explained below.Master SwitchThe MASTER switch functions in a unique way, with the following switch logic:1.When the MASTER switch is DOWN, all battery power is off. There will beno electrical power provided to the aircraft.•Note: The engine CANNOT be shut down when the master switch isoff. Electrical power must be present for the engine to turn off.2.When the MASTER switch is in the MIDDLE (Engine Start) position, limitedsystem functionality will be present. The backup battery will be activatedand power the following systems:•Primary Flight Display•Compass•AHRS (Attitude Heading Reference System)•Radio3.When the MASTER switch is UP (Normal Operation), full electrical supplywill be provided to the aircraft. The following systems will be powered on: •Note: the engine CANNOT be started with the MASTER switch in theUP position. If the engine won’t start, check the switch is in theMIDDLE position•Multi-Function Display•Transponder•Autopilot•Audio panel•STBY instruments•Pitot Heat•Main battery is disconnected from running engine. Alternatorprovides power.See Section NORMAL PROCEDURES for positioning of the MASTER switch.Fuel Pump SwitchThe Fuel Pump switch also has some advanced logic to it, due to two fuel pumpsbeing present, however, to put it simply, it operates in the following way:1.In the DOWN position, the main fuel pump is in use.2.In the MIDDLE position, the auxiliary fuel pump is in use.3.In the UP position, both fuel pumps will be on.LAND/TAXI SwitchThe LAND/TAXI switch powers the Taxi and Landing lights. It operates in the following logic:1.In the DOWN position, both lights will be OFF.2.In the MIDDLE position, the taxi light will switch on when the landinggear is extended.3.In the UP position, the Landing Light will switch on when the landinggear is extended.Strobe/Nav SwitchThe Strobe/Nav switch powers the Navigation (Red/Green) and Strobe (flashingwhite) lights. It operates in the following logic:1.In the DOWN position, both lights will be OFF.2.In the MIDDLE position, the STROBE light will be on.3.In the UP position, both the strobe and Nav lights will be on.Electrical System DiagramThe BW 635RG’s electrical system is modelled in the following way in Microsoft Flight Simulator.Because the starter system is connected to the BACKUP BUS, this means you cannot start the engine with the MASTER switch in the UP position, due to the BACKUP BUS being disconnected from the circuit once the MAIN BAT BUS is powered.Page 21 of 21User Guide v1.0 –RevisionEngineThe BW 635RG is powered by the Rotax 915iS. The Rotax 915iS is a four-stroke, four-cylinder, fuel-injected, turbocharged aircraft engine with a maximum power output of141 horsepower. The engine utilizes electronic fuel injection (EFI) technology toprovide precise fuel delivery and improved fuel efficiency. It also features a modernliquid-cooling system and a dual electronic ignition system for reliable performance.The Rotax 915iS engine has a maximum operating RPM of 5,200, with a recommended continuous operation range of 5,000 RPM or less.PropellerThe propeller is a 3-blade wood-composite design, which is hydraulically adjustable for operation at various pitch angles, controlled independently of the pilot. The propeller is linked to the engine through an electronically controlled governor, where RPM isadjusted in accordance with the position of the throttle control. This pitch curve cannot be adjusted in flight, however is designed to ensure maximum performance in allphases of flight.FuelBoth wings have fuel tanks, which are fed to the engine via electric fuel pumps. Fuelsystem information is fed via sensors to the Garmin avionics suite and can be viewedon the displays inside the cockpit.AIRPLANE WEIGHTSBasic Empty Weight……………………….…375 KgMaximum Takeoff Weight…………………..600 KgMaximum Fuel Weight………………………...95 Kg Maximum Landing Weight………………….600 Kg TANK USABLE FUEL LEFT WING TANK67.5 litres 17.8 US Gallons RIGHT WING TANK62.5 litres 16.5 US Gallons TOTAL 130 litres34.3 US GallonsFUEL CAPACITY AIRSPEEDS Never Exceed Speed ……….…………….173 KIAS Max Structural Cruising Speed…………..156 KIAS Maneuvering Speed MTOW……………….109 KIAS Initial Climb………………………………………80 KIASBest Angle Climb……………………………….75 KIASBest Rate of Climb……………………………..90 KIASMax Flap Ext 20°……………………..............90 KIASMax Flap Ext 35-45°……………………………70 KIASMax Landing Gear Operation……………….70 KIASMax Landing Gear Extended………………..90 KIASPlanned Cruise TAS………………………….130 KIASFinal Approach Speed………………………..60 KIAS POWERPLANT LIMITATIONSENGINE LIMITS (RPM)Take-off (5 Minutes)………....5800 RPM Max Continuous……………….5500 RPMALTITUDE LIMITSMaximum Operating Altitude………………23 000ftFor Microsoft Flight Simulator Use Only0-12023 Orbx Simulation Systems Pty. Ltd BW 635RG QUICK REFERENCESHEETIssued: 21 Apr 2023Revised: 21 Apr 20230-2PROCEDURESBEFORE STARTING ENGINEPreflight Inspection………………………….COMPLETECrew Briefing………………………………….COMPLETEIgnition…………………………………………………….OFFMaster Switch…………………………………………..OFFBackup Battery …..…………………………….OFF/AUTOLanding Gear Lever………………………………..DOWNCircuit Breakers…………………………………………..IN Canopy………………………………………………CLOSED STARTING ENGINEArea……………………………………………………..CLEARParking Brake……………….HOLD TOE BRAKES ANDENGAGEMaster Switch …..……………….ENGINE START (MID)Fuel Selector…………………………………………….SETFuel Pump………………………………………BOTH (UP)Ignition………………………………………………….BOTHExternal Lights……………………………………..AS REQThrottle ………………………..………..Τ12-1 INCH OPENIgnition………………………………………………….START AFTER START Oil Pressure.…………………………………………RISING Master Switch ……………………………..NORMAL (UP)Radios………………………………………………………SET Altimeter…………………………………………………..SET ATIS and Clearance…………………………..OBTAINEDBEFORE TAXIBrakes/Park Brake ………………………….DISENGAGEFlight Instruments……………………………..CHECKEDCompass…………………………………………CHECKED BEFORE TAKEOFFCanopy/Harnesses………………………………SECURE Flaps…………………………………….……1 STAGE (20°)Trim ..……………………………………SET FOR TAKEOFF Flight Instruments………………………………………SET Engine Instruments………………CHECKED NORMAL Avionics…………………………………………………….SET External Lights………………………………………AS REQ Flight Controls…………..FULL, FREE AND CORRECT Takeoff Safety Brief………………………….DELIVERED TAKEOFFBrakes/Park Brake………………………….DISENGAGEPower…………SMOOTHLY INCREASE TO MAXIMUM45 knots………………………………………………ROTATEAccelerate……….…NOSE ON HORIZON, TO 80 KTSPositive Rate of Climb………………………….GEAR UPLanding Light.……………………………….OFF (DOWN)Flaps ………………………..RETRACT ABOVE 500’ AGLMEMORY ITEMS 2023 Orbx Simulation Systems Pty. Ltd ENGINE RUN UP Parking Brake ……………………………………..ENGAGE Engine Instruments……………………………CHECKED Engine RPM…………………………………SET 2500 RPM Fuel Pump…………………………………………….CYCLE Idle …………………..…..CHECK IDLE 1800 ±100RPM Navigation Equipment …..…………………………….SETFor Microsoft Flight Simulator Use OnlyIssued: 21 Apr 2023Revised: 21 Apr 2023AFTER TAKEOFF Engine Instruments……………………..WITHIN LIMITS Climb Speed…………………………………………90 KIAS Fuel Pump………….MAIN (DOWN ) ABOVE 500’ AGL0-3CRUISEPower….……………………………………….SET 55-75%Airspeed…..……….120-157KTS (<130KTS IN TURB.)DESCENTAltimeter…………………………………………………..SETFuel Selector………………………………FULLEST TANKPower Lever………………….AS REQUIRED FOR RODApproach Brief………………………………PLETE BEFORE LANDINGBrakes……………………………………………………..OFFFuel ………….………………………………QTY CHECKEDFuel Selector………………………………FULLEST TANK Fuel Pump……….………………………………BOTH (UP)LANDINGDOWNWINDAirspeed….………………………………………….90 KIASFlaps….………………………………………STAGE 1 (20°)Airspeed………….………………………………….65 KIASLanding Gear…..…………………….DOWN @ 65 KIASCHECK 3 GREENLanding Light………………………………………ON (UP)BASEFlaps…………………………… STAGE 2 (35°) < 65 KIASFINALAirspeed………….………………………………….60 KIASTouchdown ……………………….MAIN WHEELS FIRSTStick………………………………………………FULL BACK Brakes…………………………………………………..APPLYAFTER LANDING Flaps………………………………………………..RETRACT Landing Lights…………………………………………..OFFFuel Pump….………………………………MAIN (DOWN)SHUTDOWNParking Brake ……………………………………..ENGAGE Throttle……………………………………………………IDLE Switches….………………………….OFF EXCL. MASTERIgnition..…………………………………………………..OFFLights….……………………………………….OFF (DOWN)Master Switch..……………………………..OFF (DOWN)MEMORY ITEMS 2023 Orbx Simulation Systems Pty. Ltd For Microsoft Flight Simulator Use OnlyPROCEDURESIssued: 21 Apr 2023Revised: 21 Apr 2023。
UHF电子标签读写模块UHFReader用户手册V

UHF电子标签读写模块UHFReader86用户手册V1.10目录一、通讯接口规格 (1)二、协议描述 (1)三、数据的格式 (2)1. 上位机命令数据块 (2)2. 读写模块响应数据块 (2)四、操作命令总汇 (4)1. EPC C1 G2(ISO18000-6C)命令 (4)2. 读写模块自定义命令 (4)五、命令执行结果状态值 (5)六、电子标签返回错误代码 (9)七、标签存储区及需要注意的问题 (9)八、操作命令详细描述 (10)8.1 命令概述 (10)8.2 EPC C1G2命令 (10)8.2.1 询查标签 (10)8.2.2 读数据 (12)8.2.3 写数据 (14)8.2.4 写EPC号 (15)8.2.5 销毁标签 (15)8.2.6 设定存储区读写保护状态 (16)8.2.7 块擦除 (18)8.2.8 读保护设置(根据EPC号设定) (19)8.2.9 读保护设置(不需要EPC号) (20)8.2.10 解锁读保护 (21)8.2.11 测试标签是否被设置读保护 (21)8.2.12 EAS报警设置 (22)8.2.13 EAS报警检测 (23)8.2.14 询查单张标签 (23)8.2.15 块写命令 (23)8.2.16 读取Monza4QT工作参数 (25)8.2.17 设置Monza4QT工作参数 (26)8.2.18 指定掩码扩展读数据 (27)8.2.19 指定掩码扩展写数据 (28)8.2.20 带缓存询查 (30)8.3读写模块自定义命令 (32)8.3.1 读取读写模块信息 (32)8.3.2 设置读写模块工作频率 (33)8.3.3 设置读写模块地址 (34)8.3.4 设置读写模块询查时间 (34)8.3.5 设置串口波特率 (34)8.3.6 调整功率 (35)8.3.7蜂鸣器设置 (35)8.3.8 GPIO控制命令 (36)8.3.9 读取GPIO状态 (36)8.3.10 读写模块唯一序列号获取 (36)8.3.11 标签自定义功能设置 (37)8.3.12 设置缓存的EPC/TID长度 (37)8.3.13 获取缓存的EPC/TID长度 (37)8.3.14缓存数据获取 (38)8.3.15清缓存 (39)8.3.16 查询缓存区标签数量 (39)一、通讯接口规格读写模块通过UART或者USB接口与上位机串行通讯,按上位机的命令要求完成相应操作。
UHF跳频增程电台蓝牙使用说明书

1、买一对主、从蓝牙模块,HC06或者HC07,主从要一样的型号。
波特率都设置成57600。
2、从机模块要裸的蓝牙模块,不带底板,3.3V供电(或者买带底板的,自己再拆下来)焊接到蓝牙板的头追蓝牙模块位置。
3、主机模块要带底板的,可以接5V供电的。
这样可以从头追模块5V处取电。
头追模块的5V、GND、TX1,接主机蓝牙模块的5V、GND、RX。
4、地面电台进入设置模式,功能3,进入【关闭地面站蓝牙模块15秒】功能(看说明书),避免蓝牙对码对到地面站蓝牙模块上。
如果没有地面站蓝牙模块,只有头追蓝牙模块,则无需进行此操作。
5、按头追处的主机蓝牙模块的对码按钮,直到蓝牙对码成功,地面电台蓝牙板上的绿灯常亮,头追上的蓝牙模块灯常亮。
头追上一个小开关是回中开关这个开源头追上有介绍
因为311眼镜5V 不太好引出线太细了,开始准备2S降压,试了下2S电池比较重就用了1S升压5V 也是很小的模块找了个小1S锂电
试了下距离大概5-6米距离灵敏度很好。
CRUISE_计算任务介绍

Simulation3/4/ 5用于实时仿真
路谱与时间相关 路谱与距离相关
标准 高级
自定义惯性质量 通过惯性质量等级定义
Cruise Support Team, 12.2010
14
Project Data - 任务文件夹 计算任务 – 循环工况
CRUISE自带路谱:
Profile
换挡信息可以直接在Gear Box Control中定义
v2009 + v2009.1
Cruise Support Team, 12.2010
12
Project Data - 任务文件夹 计算任务 -循环工况(Cycle Run)
主要目标是计算驾驶循环中的燃油消耗和排放,比如标准的驾驶路谱 (e.g.
Cruise Support Team, 12.2010
17
Project Data - 任务文件夹 计算任务 – 爬坡性能
固定额外载荷(绝对) 变动额外载荷(绝对) 固定额外载荷(相对)
空载 半载 满载
Cruise Support Team, 12.2010
18
Project Data - 任务文件夹 计算任务 – 稳态性能分析(Constant Drive)
Expert mode 专家模式 PP variables PP变量 Vehicle车辆
SAM Folder SAM文件夹 OPT Folder OPT文件夹 VSM Folder VSM文件夹 Task Folder 任务文件夹
Cruise Support Team, 12.2010
3
Project Data - 任务文件夹 设置和PP 变量文件夹– 数据
2024年CRUISE基础培训教程

CRUISE基础培训教程一、引言CRUISE(CruiseControlSystem)是一种车辆巡航控制系统,通过自动调节车速,使车辆保持恒定的速度行驶。
本教程旨在帮助用户了解CRUISE的基础知识,掌握其使用方法,并确保驾驶安全。
二、CRUISE系统概述1.系统组成CRUISE系统主要由控制单元、传感器、执行器等部件组成。
控制单元负责接收传感器信息,处理数据并输出控制信号;传感器包括车速传感器、转向角传感器等,用于实时监测车辆状态;执行器包括节气门执行器、制动执行器等,用于实现车速的自动调节。
2.工作原理CRUISE系统通过控制节气门开度,使发动机输出合适的功率,以实现车速的恒定。
当车辆速度低于设定值时,系统会增加节气门开度,提高发动机输出功率;当车辆速度高于设定值时,系统会减小节气门开度,降低发动机输出功率。
3.系统功能(1)恒速巡航:根据驾驶员设定的速度,CRUISE系统自动调节车速,使车辆保持恒定速度行驶。
(2)自适应巡航:CRUISE系统通过雷达或摄像头等传感器,实时监测前方车辆的速度和距离,自动调整自身车速,保持与前车的安全距离。
(3)弯道巡航:CRUISE系统可根据转向角传感器信息,自动降低车速,确保车辆在弯道行驶时的稳定性。
(4)停车巡航:当车辆需要临时停车时,CRUISE系统可自动控制制动器,使车辆平稳减速并停车。
三、CRUISE系统操作方法1.开启CRUISE系统(1)按下CRUISE开关,使系统进入待机状态。
(2)当车速达到期望值时,按下SET/-按钮,设定当前车速为巡航速度。
(3)释放加速踏板,CRUISE系统开始工作,车辆进入恒速巡航状态。
2.调整巡航速度(1)按下RES/+按钮,车速将逐渐增加,每按一次,车速增加1km/h。
(2)按下SET/-按钮,车速将逐渐降低,每按一次,车速降低1km/h。
3.取消CRUISE系统(1)按下CANCEL按钮,系统将立即退出巡航模式。
UHF车载型发射与接收系统用户使用手册[内芯]
![UHF车载型发射与接收系统用户使用手册[内芯]](https://img.taocdn.com/s3/m/ab32084469eae009581bec47.png)
PLUSTEK-2010 UHF 数字化音视频通讯指挥系统车载型发射与接收系统说明书科技有限责任公司安全事项请阅读以下简明的规则。
以便您能够更好、更安全地使用PLUS TEK-2010数字化无线音视频指挥系统。
不遵守这些规则可能会导致危险或触犯法律。
本系统使用DC 12V/A C220V,请注意安全用电。
机内有数字无线发射与接收模块、多媒体数据编解码模块、功率放大器等配件,未经厂家授权,请勿拆卸。
设备应放置干燥、通风、无腐蚀性气体场合,避免潮湿、腐蚀带来的设备损害。
注意保持机体清洁,机体清洁时,应断开电源,用清洁的棉布擦拭。
请勿在加油站内或禁止使用无线设备的场所使用本设备,在燃料或化学制品附近时请不要使用本设备。
只有合格的维修人员才可以安装或修理本设备。
目录安全事项 (2)1、前言 (5)1.1本书目的 (5)1.2读者对象 (5)1.3注意事项 (5)1.4环境保护 (6)2、产品简介 (6)2.1产品概述 (6)2.2产品技术特点 (7)3、电气/物理结构 (7)3.1设备介绍 (7)3.2车载发射机面板 (9)3.2.1车载发射机前面板 (9)3.2.2车载发射机后面板 (10)3.3中心接收机面板 (11)3.3.1中心接收机前面板 (11)3.3.2中心接收机后面板 (12)4、设备安装 (13)4.1车载发射机 (13)4.1.1车载发射机组件 (13)4.1.2车载发射机安装方法 (14)4.2中心接收机 (14)4.2.1接收机组件 (14)4.2.2全向玻璃钢天线安装 (15)4.2.3接收机安装方法 (15)5、基本操作手册 (16)5.1车载发射机控制 (16)5.2中心接收机菜单控制 (17)5.3视频监控 (17)5.3.1通过网络进行多媒体的实现 (17)5.3.1.1通过局域网实现 (17)5.3.1.2通过外网实现 (19)6、包装单 (20)6.1、车载发射机设备 (20)6.2、中心接收机设备 (20)7、附录 (21)7.1 保修说明 (21)7.1.1售后服务规定 (21)7.1.2非保修范围情况说明 (22)1、前言1.1本书目的《PL UST EK-2010 U HF数字化音视频指挥系统用户操作手册》描述了安装和配置PL UST EK-2010 U HF数字化音视频指挥系统的具体方法。
南京依维柯欧胜纯电动汽车 使用说明书

注意事项.......................................................... 69 车辆充电.......................................................... 74 电源总开关...................................................... 76 车辆起动.......................................................... 77 运行.................................................................. 79 低速提示音装置.............................................. 79 停车.................................................................. 80 突发事件及处理.............................................. 80 动力系统布置(70KWH) .............................. 83 动力系统布置(78KWH、88KWH) ............... 84 动力系统布置(90.7KWH) ........................... 85 汽车的合理使用.............................................. 90 正常运营车辆的使用要求.............................. 91 久放不用车辆的使用要求.............................. 91 充电机的使用.................................................. 91 电池保养的操作方法...................................... 92 使用辅助电瓶起动.......................................... 93 踏板.................................................................. 95 驻车制动.......................................................... 95 行车制动.......................................................... 96 车辆牵引.......................................................... 96 制动防抱死系统(ABS) ............................... 97 *车身电子稳定系统(ESP) .......................... 99
潍柴汽车产品说明书

I
INDEX
v w
Main Menu
Index
Changing Oil How to......................................... 147 When to...................................Байду номын сангаас... 135
Charging System Indicator .... 46, 186 Checklist, Before Driving............. 123 Child Safety ...................................... 29
Booster Seats ............................... 38 Child Seats.................................... 34 Important Safety Reminders ...... 32 Larger Children ........................... 37 Risk with Airbags ........................ 30 Small Children.............................. 33 Child Seats........................................ 34 Cleaning Seat Belts........................ 160 Clock.................................................. 54 Clutch Fluid.................................... 154 CO in the Exhaust ......................... 207 Cold Weather, Starting in ............. 124 Compact Spare Tire....................... 174 Consumer Informationˎ................ 212 Controls, Instruments and.............. 43 Convertible Top ............................... 70 Convertible Top Cover................ 72 Lowering the Convertible Top... 70 Maintenance................................. 74 Raising the Convertible Top ...... 73
cruise2010详细教程

需要的方案
载入选中的方案:
快捷键图标
右击鼠标下拉菜单
load命令
载入后桌面切换到
Project Data 文件夹
项目/方Байду номын сангаас的使用
从载入的项目生成新的项目和/或方案
点击快捷图标“quick save
project
as …” 打开对话框,路径、项目名
称和方案可以修改和保存
点击Cruise浏览器按钮打开“cruise explorer “
用户界面结构和管理
导航窗口主选项卡
导航窗口上侧三个主 选项卡: Desk tab桌面选项卡 作为建模的主要界面 User tab用户选项卡 作为登录选项卡和当 前项目目录界面 Tools tab工具选项卡 对支持应用程序,比 如Cruise手册,信道 向导,后处理图形浏 览器,数据文件编辑 器等
用户界面结构和管理
CRUISE软件讲解流程
用户界面结构和管理 启动CRUISE平台 项目/方案的使用 创建车辆模型 组件数据管理 数据线和信号线的连接 项目数据任务文件夹 计算中心 结果管理器
用户界面结构和管理
Navigation Frame导 航窗口 左侧是带快捷键的导 航窗口,有三个选项 卡和不同 使用功能的结构目录 Application Frame 应用窗口 右侧是与导航窗口所 选择的应用功能相对 应的视图 Side bar工具栏 是应用窗口的一部分
2024版cruise详细教程

07 总结与展望
回顾本教程内容
cruise2024基础概念介 绍
系统安装与配置
详细解释了cruise2024的定义、 功能和应用领域。
提供了详细的安装步骤和配置 选项,帮助用户顺利搭建 cruise2024环境。
添加cruise2024路径
在环境变量中,将cruise2024的安装路径添加到 系统路径(PATH)中,以便系统能够找到并执 行cruise2024命令。
保存并关闭编辑器 保存对环境变量的更改,并关闭编辑器。
验证安装和配置
打开命令行终端
启动命令行终端或控制台。
输入cruise2024命令
在终端中输入cruise2024命令,并按Enter键执行。如果安装和配置正确,系统将显示 cruise2024的帮助信息或版本信息。
调试技巧和工具
技巧1:使用日志记录 在程序中添加适当的日志记录语句,以便在出现问题时能够追踪和诊断。
调试技巧和工具
技巧2:断点调试
在代码中设置断点,使用调试器逐步执行代码,观察变量值和程序状态。
调试技巧和工具
工具1:调试器
使用专门的调试工具,如GDB或Visual Studio的调试器,进行更深入的调试和分析。
源。
进阶课程与培训
对于希望深入了解cruise2024的用户,可 以参加相关的进阶课程和培训课程,提升
自己的技能水平。
社区论坛
cruise2024拥有活跃的社区论坛,用户可 以在其中交流经验、解决问题并获取最新 动态。
实践项目与经验分享
通过参与实践项目和阅读他人的经验分享, 用户可以更好地掌握cruise2024的应用技 巧并拓展自己的视野。
泛马汽车GM AUTOnomy水化燃料单元系统概述说明书

52April 2002GM’s Futuristic ‘Skateboard’General Motors has devel-oped the world’s first vehi-cle designed completely around a hydrogen fuel cell propulsion system. Dubbed AUTOnomy, this futuristic GM concept vehicle so pro-foundly changes the auto-motive industry, says GM,that the company is seeking 24 patents covering related business models, technolo-gies and manufacturing processes. The chassis,which GM nicknamed “skateboard,” would con-tain all of its propulsion and control systems within a 6-inch-thick skateboardlike chassis.All of AUTOnomy’s es-sential systems, including the fuel cell stack and on-board hydrogen storage system, are neatly packaged in the thin chassis, whose unique design simplifies manufacturing and service,and enables a wide variety of vehicles to be built on a small number of platforms,with much shorter product development cycles, as well. AUTOnomy runs on a fuel cell adapted from GM’s existing HydroGen III fuel cell system.The nerve center of AUTOnomy’s electrical sys-tem is the universal “dock-ing port,” or connection, at the center of the chassis. It creates a quick and fool-proof way to connect all the body systems—controls,Tom Nash As shown in the illustration above, GM’s AUTOnomy concept houses the entire hydrogen fuelcell powertrain and all controls in what GM calls a “skateboard” chassis. This allows for avariety of body styles to be used interchangeably. AUTOnomy’s configuration could be changed from a sleek sports sedan (shown below) to a pickup body for hauling, say, fire-wood. Different body styles could be leased from the local GM dealership.The Mercury Marauder Convertible concept vehicle shown at the recent Chicago Auto53April 2002but Mercury says that me-dia and public response has been positive.MAP Revises Its StandardsThe Motorist Assurance Program has released its re-vised 2002 Uniform In-spection & Communication Standards (UICS) for all seven vehicle systems—Brakes, Drivetrain, Engine Maintenance & Perfor-mance, Electrical, Exhaust, HVAC and Steering & Sus-pension. Service providers participating in MAP need to implement the new UICS immediately.“These revisions are made biannually to reflect changes in technology as part of MAP’s commitment to consumers and partici-pating service providers,”explained MAP presidentLawrence Hecker. “We alsoupdate the Uniform In-spection and Communica-tion Standards to continuemaking them as user-friendly as possible fortechnicians and their cus-tomers.”Copies of the UICS canbe downloaded from theMembers Only section ofMAP’s website (located at)using apass code provided by theMAP office. A copy is alsoavailable on CD. Nonmem-bers may purchase copies inprinted form by contactingMAP at 301-634-4955 or****************.Associations Stand UpAgainst Scrappage LawsSeven automotive aftermar-ket associations recentlysigned a letter to U.S. Sen-ate Majority Leader TomDaschle (D-SD) opposingSection 803 of Senate Bill1766, the Energy PolicyAct of 2002. Section 803,“Assistance for State Pro-grams to Retire Fuel-Inef-ficient Motor Vehicles,”would provide states fundsfor vehicle scrappage pro-grams. The program is de-signed to reduce domesticfuel consumption.The letter was written onbehalf of the following after-market groups: AutomotiveService Assn. (ASA), Auto-motive Aftermarket IndustryAssn. (AAIA), AutomotiveEngine Rebuilders Assn.(AERA), Automotive PartsRebuilders Assn. (APRA),Automotive Warehouse Dis-tributors Assn. (AWDA),Specialty Equipment Man-ufacturers Assn. (SEMA)and Tire Assn. of NorthAmerica (TANA).The program in Section803 allows for the purchaseof vehicles that are 15 yearsold or older and requiresthat they be scrapped. Thesection does not provide arepair option or a means todetermine if a vehicle hasvalue as a classic model orcontains salvageable parts.Section 803 does notguarantee a scrapped vehi-cle will be replaced with amore fuel-efficient vehicle;it does not guarantee thatlow-income or fixed-in-come persons will be ableto afford a new vehicle,much less a fuel-efficientone; and it does not recog-nize that older vehicles canbe repaired and maintainedto be fuel-efficient vehicles.RADIATOR FANASSEMBLIESApplication Specific AssembliesHonda Accord 1997-92AC Fan 2.2, 2.7LChrysler Corp. Mini Vans 1995-912.5,3.0, 3.3, 3.8L54April 2002“ASA has consistently tak-en issue with any scrappage legislation, state or federal,that did not, at a minimum,provide a repair option for these older vehicles,” said Bob Redding, ASA’s Wash-ington DC representative.“The few state programs in existence have also eliminat-ed in their policy discussions the hope of a repair option,but none of these programs have produced reduced emis-sions to any large degree.”NAPA/ASE NamesPiraino Tech of the YearNAPA Auto Parts, in con-junction with the National Institute for Automotive Service Excellence (ASE),named Jim Piraino, owner of Camarillo Car Care Cen-ter in Camarillo, California,its 2002 NAPA/ASE Tech-nician of the Year. Piraino was honored for demon-strating superior technical skills and business prac-tices, showing a commit-ment to customer service and technician training,supporting the community in which his business oper-ates and demonstrating outstanding service to the automotive repair and maintenance industry.“In our business plan, we set the goal of being recog-nized as the premier ser-vice facility in our commu-nity,” said Piraino. “Being recognized as best in the nation was beyond my wildest dreams. It’s a tremendous honor, and something we will take a great deal of pride in as we represent NAPA and ASE in 2002.”Jim Piraino, owner of Camarillo Car Care Center in Camarillo,California, was named 2002 NAPA/ASE Technician of the Year (he was a finalist in each of the previous five years). His NAPA AutoCare shop employs six ASE-Certified Master Technicians.FLEXIBLE W AND GETS INTO TIGHT AREAS!NEW! UL TRA-BRIGHT LED TECHNOLOGY!COMFOR T GRIP WITH E-Z ACCESS ON/OFFBUTTONFLEX n GLOW53512 (P A T . PEND.)CORDL ESS 12V/50W UV LIGHT KIT53400UV LEAK DETECTION•This Unique cordless light offers convenience and portability •Light kit includes high intensity light, UV enhancing safety goggles, rechargeable battery pack and battery chargerAdding dye to an A/C systemis FAST & EASY!Simply connect the injector and twist the handle just one turn to the next application line. Replaceable cartridges are available for 10 or 25 applications of Universal Dye that is compatible with R12 and R134a systems. The injectorhose comes complete with a R134a Adapter for 1/4FL systems.“World Class Quality”MASTERCOOL • 2 Aspen Drive • Randolph, NJ • PH: (973) 252-9119 • FAX: (973) 252-9119Circle #24。
2024版Cruise教程PPT课件

01Cruise是一种自动化驾驶系统,旨在提供安全、舒适和高效的驾驶体验。
02Cruise通过集成多种传感器、算法和车辆控制技术,实现车辆的自主驾驶功能。
03Cruise可以应用于多种场景,如城市道路、高速公路等,提高交通效率和安全性。
Cruise定义及作用Cruise成立于2013年,由一批来自斯坦福大学和麻省理工学院的工程师创建。
2019年,Cruise获得了通用汽车的投资,并开始了商业化运营。
2016年,Cruise推出了第一代自动驾驶汽车测试车队。
目前,Cruise已经在美国几个城市开展了自动驾驶出租车和配送服务。
Cruise发展历程01应用场景02优势自动驾驶出租车、自动驾驶配送、自动驾驶公共交通等。
提高交通效率、减少交通事故、节省能源、提升乘客体验等。
应用场景与优势本次教程目标与安排目标介绍Cruise自动驾驶系统的基本原理、技术架构和应用场景;掌握Cruise自动驾驶系统的开发流程和调试方法;了解Cruise自动驾驶系统的未来发展趋势和挑战。
安排首先介绍Cruise自动驾驶系统的概述和引入;然后详细讲解Cruise自动驾驶系统的技术架构和功能模块;接着介绍Cruise自动驾驶系统的开发流程和调试方法;最后探讨Cruise自动驾驶系统的未来发展趋势和挑战,并给出相应的建议和展望。
负责接收上层控制指令,对车辆进行横向和纵向控制。
车辆控制模块将多种传感器数据进行融合处理,输出车辆周围环境信息。
传感器融合模块根据车辆当前位置和目的地,规划出最优行驶路径。
路径规划模块根据车辆周围环境信息和路径规划结果,做出驾驶决策并控制车辆行驶。
决策控制模块核心组件介绍Cruise系统通过传感器感知车辆周围环境。
路径规划模块根据感知结果规划出最优行驶路径。
决策控制模块根据规划路径和车辆状态信息做出驾驶决策。
车辆控制模块执行驾驶决策,控制车辆按照规划路径行驶。
0102030405工作原理简述自动驾驶指车辆能够在没有人类驾驶员的情况下,通过计算机系统实现自动驾驶功能。
一种基于UHF频段RFID的汽车防盗系统
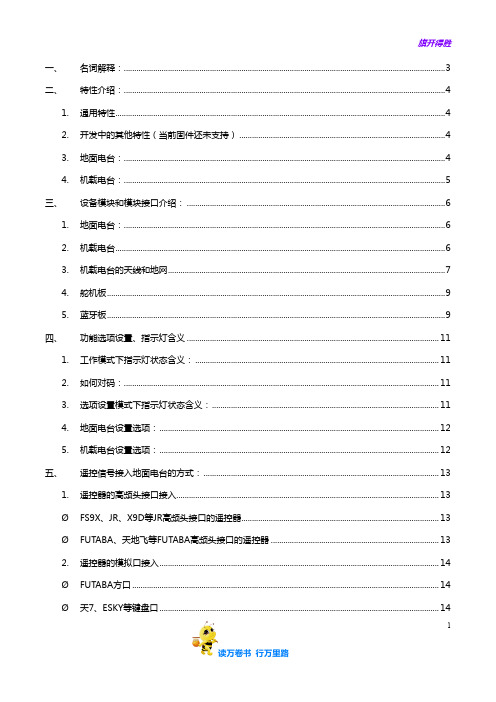
籍量弘裂裂i l l一种基于U H F频段R FI D的汽车防盗系统李筠王校(四川大学电气信息学院四川成都610065)[摘要】介绍一种基于RF T D U H F频段的汽车防盗设计。
使用欧姆龙V750读写器和N X P U-CO D E E PC G2智能卡标签结合凌阳16位单片机sPcE06l A介绍该防盗系统的实现原理,并给出其硬件和软件的设计方法。
[关键词】U H F R FI D汽年防盗U-C O D E E PC G2SPC E061^中图分类号:T P7文献标识码:A文章编号l1571--7597(2008)1120076--01一、曩述随着我围经济水平的发展,居民拥有私家车比例大大提高。
然而针对汽车的盗窃事件数量也急剧上升。
因此汽车防盗形成了涉及现代J H=会千家万户的庞人市场。
本文将介绍一种基于R FID技术0H F频段的汽午防盗系统的设计,作用范围大,适用于停车场等场合,是解决公共场所汽车安全问题的较理想方案.系统设计成本不高,易于推广.二、曩件设计(一)RF I D技术基础射频识别技术(R FID.即R adi o F r e quen cy I de nt i f i c at i on),俗称电子标签,是‘种非接触式的自动识别技术,它通过射频信号自动识别目标对象并获取相关数据,识别工作无须人工干预,可工作于各种恶劣环境。
无线射频识别技术町识别高速运动物体并可同时识别多个标签,操作快捷方便。
其基本上作原理为:标签进入磁场后,接收解读器发出的射频信号,凭借感应电流所获得的能量发送出存储在芯片中的产品信息(Pas si veTag,无源标签或被动标签),或者土动发送某一频率的信号(A ct i veTag。
有源标签或主动标签);解读器读取信息并解码后,送至中央信息系统进行有关数据处理。
按照RF I D系统读写器与标签之间进行数据交换的电磁波的工作频率.R FI D系统的工作频段町以分为低频(L F)(30~300kH z,典型频率有125kH z、134.21r i t z)、高频(H F)(3~30M l t z,典型频率为13.56删z)、超高频(u}I F)(300~968kf l'l z,典型频率869.5M H z、915.3删z)、微波(湘)(2.45~5.8G H z,典型频率为2.45G H z)等四个频段。
超高频(UHF)与高频(HF)对比分析

超高频(UHF)与高频(HF)对比分析成都珠峰远景科技有限公司二〇一一年九月十四日目录一、超高频(UHF)与高频(HF)对比41、UHF标签读写距离远近可调____________________________________________ 42、UHF实施成本低______________________________________________________ 42、UHF标签体积小、隐蔽性好,使用寿命长________________________________ 43、UHF标签能够快速读取________________________________________________ 44、超高频技术__________________________________________________________ 5二、问题剖析61、标准问题____________________________________________________________ 62、技术成熟性__________________________________________________________ 63、辐射问题____________________________________________________________ 64、标签问题____________________________________________________________ 7一、超高频(UHF)与高频(HF)比较1、UHF标签读写距离远近可调HF RFID电子标签读取近,其极限距离为1.0m,而UHF RFID电子标签的读取距离可近可远,不但可以应用于近距离的单品识别,而且也适合于远距离的车辆自动识别,识别距离灵活可调;可轻松的从几米外读取,有源UHF RFID电子标签甚至可达到200M。
Cruise各部件参数定义说明(电动车建模)
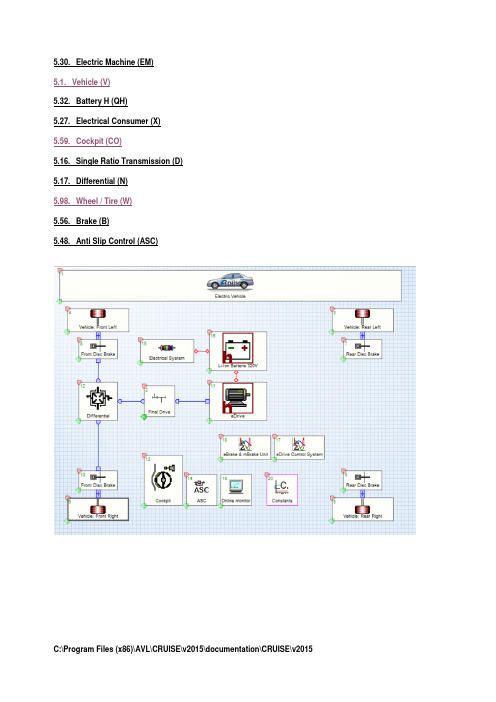
5.30. Electric Machine (EM)5.1. Vehicle (V)5.32. Battery H (QH)5.27. Electrical Consumer (X)5.59. Cockpit (CO)5.16. Single Ratio Transmission (D)5.17. Differential (N)5.98. Wheel / Tire (W)5.56. Brake (B)5.48. Anti Slip Control (ASC)C:\Program Files (x86)\AVL\CRUISE\v2015\documentation\CRUISE\v20155.30. Electric Machine (EM)The Electric Machine component can be used either as an electric motor or as a generator. There are separate characteristic maps for each mode. Together with the Battery H and Supercapacitor components, the user can simulate hybrid systems.电机组件可作为电动机或发电机使用。
每种模式都有单独的特性参数。
与电池H和超级电容器组件一起,用户可以模拟混合动系统。
The model of the electric machine contains two components, the inverter and the electric motor. For this type of model a characteristic map for the efficiency is used to calculate the loss of power.The thermic model takes the warm up of the electric machine into account regarding the occurring losses. The warm up of the environment with respect to the cooling system due to the electric machine is not considered in the electric machine component.电机的模型包含两个组件,逆变器(DC to AC)和电动马达。
UHF标签卡在矿井机车识别中的应用

…
…
…
一
掌 童 一 I
路桥 工 程 质 量 的影 响 因素分 析及 对 策
辽宁省路桥建设 集 团有限公 司第三分公 司 彭海辉
【 摘要 】路桥 工程质 量的高低不仅 关系到路桥单位经济利益的实现 ,更重要的是其对社会和 国民经济 的稳定运行也有着 至关重要 的作用 。如何保证路桥工程项 目的质量是 路桥单位应该考虑 的关键 领域,但 由于工程项 目本身的复杂性 ,如何合理地加强质量管理一直是路桥业面 临的重大难题 。本文着重剖析 了路桥工程质量 问题 的特征 以及形 成阶段 ,并在 此基础上对 如何提 高工程质 量提 出 了 相 关建议 ,为质量管理问题的解决作 出自己的一点贡献。
段。
( 2 ) 项 目决策 阶段 。决策是 在项 目可行性 研 究 的基础 之 上 , 以可 行性 研 究 的结果 为基 础 ,综 合衡量建设 项 目与环境 的适应程度 ,以 及 项 目所 能创 造 的收 益 等情 况 ,做 出开 工 与 否 的决断。决策结 果应能充分反 映建设者 的意 愿 ,使 收益、质量和 进度协调 统一,确定项 目 应达到 的质量水平和 目标。 ( 3 ) 勘 查设计 阶段 。勘查主 要是对 项 目建 设地 点的地质条件 、环境等进行 分析和论证 的 环 节 ,为 工程 的 设计 和施 工 提供 相 关 资料 。 而 设计 则 主要 针对 项 目建设 所采 用 的技 术 、 结构 、设备安装等 环节制定工作 计划和工作 方 针 。勘 查的结果准 确与否 ,直接影 响设计工 作 的完成情 况,而设计 作为整个工程 建设阶段 的 开端 ,一旦出现 问题 ,将是全局 性的,对项 目 的 预期 规划 产 生 毁灭 性影 响 。据 有关 调 查分 析 ,实 际生活 中约有4 2 % 的工程质 量 问题源 于 设计阶 段,可见勘察 设计对于工程 建设 的重要
LF, HF, UHF都分别代表什么

LF, HF, UHF都分别代表什么?和我们听的收音机道理一样,射频标签和阅读器也要调制到相同的频率才能工作。
LF,HF,UHF就对应着不同频率的射频。
LF代表低频射频,在125KHz左右,HF代表高频射频,在13.56MHz左右,UHF代表超高频射频,在860至960MHz范围之内。
对一个RFID系统来说,它的频段概念是指读写器通过天线发送、接收并识读的标签信号频率范围。
从应用概念来说,射频标签的工作频率也就是射频识别系统的工作频率,直接决定系统应用的各方面特性。
在RFID系统中,系统工作就像我们平时收听调频广播一样,射频标签和读写器也要调制到相同的频率才能工作。
射频标签的工作频率不仅决定着射频识别系统工作原理(电感耦合还是电磁耦合)、识别距离,还决定着射频标签及读写器实现的难易程度和设备成本。
RFID 应用占据的频段或频点在国际上有公认的划分,即位于ISM波段。
典型的工作频率有:125kHz、133kHz、13.56MHz、27.12MHz、433MHz、902MHz~928MHz、2.45GHz、5.8GHz等。
按照工作频率的不同,RFID标签可以分为低频(LF)、高频(HF)、超高频(UHF)和微波等不同种类。
不同频段的RFID工作原理不同,LF和HF频段RFID 电子标签一般采用电磁耦合原理,而UHF及微波频段的RFID一般采用电磁发射原理。
目前国际上广泛采用的频率分布于4种波段,低频(125KHz)、高频(13.54MHz)、超高频(850MHz~910MFz)和微波(2.45GHz)。
每一种频率都有它的特点,被用在不同的领域,因此要正确使用就要先选择合适的频率。
低频段射频标签,简称为低频标签,其工作频率范围为30kHz~300kHz。
典型工作频率有125KHz和133KHz。
低频标签一般为无源标签,其工作能量通过电感耦合方式从阅读器耦合线圈的辐射近场中获得。
低频标签与阅读器之间传送数据时,低频标签需位于阅读器天线辐射的近场区内。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
UHF Cruiser 模块
【典型应用】
1. 道闸收费
2. 食品防伪
3. 车辆进出管理
4. 产品质检
5. 资产管理
6. 物流管理
【射频参数】
1.工作频段:902MHz ~ 928MHz(US)
920MHz ~ 925MHz(CN)
2.跳频方式:可在 840MHz到 960MHz 范围内工作
3.调制方式:ASK或PR-ASK
4.调制深度:90%
5.编码/解码:FM0或Miller编码
6.信道:840MHz ~ 960MHz
7.射频输出功率:11dBm ~ 30dBm
8.通信距离:> 5m(天线增益 8dBi,ISO18000-6C线极化标签)
9.天线连接:SMA
10.天线类型:板状天线(8dBi)
【协议规范】
支持协议:EPC C1 Gen 2,兼容ISO18000-6A/B
【管脚定义】
1 0AD2
2 OAD
3 EN
4 IRQ
5 I/O
6 I/O
7 I/O
8 I/O
9 I/O
10 I/O
11 I/O
12 I/O
13 CLKSYS
14 CLK
15 EN_PA
16 DC 3.3V
17 GND
18 GND
19 DC 5.3V
20 DC 5.3V
【通信方式】
8位并行接口
【环境参数】
1. 静电防护等级:±15kV DC 空中放电
±8kV DC 直接或间接放电
1.湿度范围:10% ~ 85% 不凝结
2.工作温度:-20℃ ~ +55℃
3.贮存温度:-40℃ ~ +85℃
【电气参数】
1.工作电压:DC 5.3V
2.输入电压范围:DC 5.0V ~ 5.5V
3.最大电流:600mA
4.最大功耗:3.5W
【物理特性】
1.外形尺寸:74.5mm × 55mm × 27mm ± 1mm
2.重量:0.042Kg
3.安装孔:4 × 3.0mm
【可选附件】
1. 电子标签:ISO18000-6C UHF RFID 电子标签
2. 天线:900MHz平板天线(8dBi)(12dBi)
3. 天线支架:1.5m ~ 2m
有意请联系:
Lusa
QQ:2637633557。