基于YL-236步进电机控制系统的设计
附亚龙YL-236型单片机控制功能实训考核装置采购项目要求
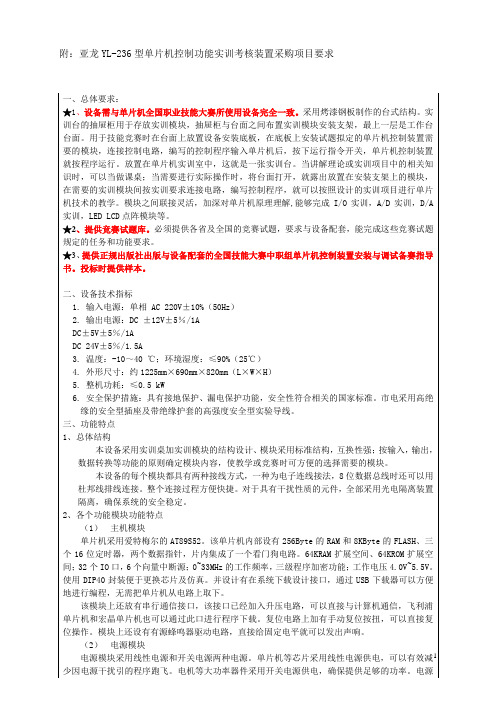
(3)仿真器模块
配备有高性能单片机仿真器,可以全功能仿真MCS51系列单片机,也可以软件仿真;软件为中国自主研发,可以很好的支持中文,支持关键字提示,自动完成符号配对等功能。支持64K程序地址断点、64K源程序有效行断点和64K临时断点,单片机内部寄存器状态一目了然。主机与计算机采用流行的USB接口。
(4)显示模块
该模块无论从最基本的显示元件LED发光二极管,还是到最高级的LCD显示屏都包含在内。具体配置为8位跑马灯(逻辑电平指示)、8位数码管动态显示、16×32点阵LED屏、1602字符型液晶显示屏、128×64绘图液晶显示屏。单片机常用的显示器件全部包含在内,使学习者可以接触所有的显示方案,设计人机界面时可以得心应手。
该模块上还放有串行通信接口,该接口已经加入升压电路,可以直接与计算机通信,飞利浦单片机和宏晶单片机也可以通过此口进行程序下载。复位电路上加有手动复位按扭,可以直接复位操作。模块上还设有有源蜂鸣器驱动电路,直接给固定电平就可以发出声响。
(2)电源模块
电源模块采用线性电源和开关电源两种电源。单片机等芯片采用线性电源供电,可以有效减少因电源干扰引的程序跑飞。电机等大功率器件采用开关电源供电,确保提供足够的功率。电源采用漏电保护开关作为总控制,安全可靠。用船形开关单独控制低压电,市电与低压电分开控制。该模块共有三组相互独立的低压电源,其中有两组是正负双电源输出。面板上放置了一个AC220输出插板,可以同时挂接三个仪器仪表。其中每组电源都有保险丝作过载保护。
步进电机驱动控制系统设计(有程序)

步进电机驱动控制系统设计(有程序)⽬录⼀前⾔ (1)⼆总体⽅案设计 (1)1⼯作原理 (1)2⽅案选择 (1)2.1时钟脉冲 (1)2.2脉冲分配器 (1)2.3驱动器 (1)3 总的框架 (2)三单元模块设计 (2)1单⽚机模块 (2)1.1复位控制 (3)1.2单⽚机频率 (3)2接⼝ (3)3驱动器ULN2003 (4)4按键模块 (5)5步进电机 (5)5.1⼯作原理 (5)5.2 28BYJ48型四相⼋拍 (7)四整机调试与技术指标测量 (8)五设计总结 (8)参考⽂献 (9)附录1电路原理图 (10)附录2 源程序 (11)⼀、前⾔步进电动机是⼀种将电脉冲信号转换成机械位移的机电执⾏元件,是机电⼀体化的关键产品之⼀, ⼴泛应⽤在各种⾃动化控制系统中。
随着微电⼦和计算机技术的发展,步进电机的需求量与⽇俱增,在各个国民经济领域都有应⽤。
⼆、总体⽅案设计1、⼯作原理步进电机是⼀种将电脉冲转化为⾓位移的执⾏机构。
通俗⼀点讲:当步进驱动器接收到⼀个脉冲信号,它就驱动步进电机按设定的⽅向转动⼀个固定的⾓度(及步进⾓)。
您可以通过控制脉冲个数来控制⾓位移量,从⽽达到准确定位的⽬的;同时您可以通过控制脉冲频率来控制电机转动的速度和加速度,从⽽达到调速的⽬的。
2、⽅案选择(1)时钟脉冲通常有两种⽅法实现:⽅案⼀直接有硬件组成如:多谐振荡器 LC 等。
⽅案⼆⽤软件的⽅式形成优点便于随时更改,调整。
为了⽅便我们选⽤软件⽅式有单⽚机实现。
(2)脉冲分配器⽅案⼀硬件环形分配器:由计数器等数字电路组成的。
有较好的响应速度,且具有直观、维护⽅便等优点。
⽅案⼆软件环分:由计算机接⼝电路和相应的软件组成的。
受到微型计算机运算速度的限制,有时难以满⾜⾼速实时控制的要求。
由软件完成脉冲分配⼯作,不仅使线路简化,成本下降,⽽且可根据应⽤系统的需要,灵活地改变步进电机的控制⽅案。
考虑到硬件设备的有限和对步进电机的控制我们选择软件环分可以有单⽚机实现。
yl236

电源电路:电源电路主要分为开关型电源和线性电源。开关电源体积小重量轻效率高等优 点,但干扰相对线性电源大。电源电路的质量直接关系到系统的可靠性和抗干扰能力。
二 单片机实验项目 ............................................................................................................................. 8 2.1 实验 1 灯光闪烁 ......................................................................................................... 8 2.2 实验 2 跑马灯实验.................................................................................................... 10 2.3 实验 3 独立按键输入实验........................................................................................ 12 2.4 实验 4 光电隔离输入输出实验................................................................................ 15 2.5 实验 5 金属检测实训................................................................................................ 16 2.6 实验 6 动态数码管显示实验.................................................................................... 18 2.7 实验 7 矩阵键盘接口实训........................................................................................ 21 2.9 实验 9 继电器隔离控制实验.................................................................................... 25 2.10 实验 10 蜂鸣器演奏实验........................................................................................ 27 2.11 实验 11 8255 芯片扩展 IO 口实验......................................................................... 32 2.92 实验 92 字符型液晶显示模块控制实验................................................................ 38 2.12 实验 12 液晶显示模块控制实验............................................................................ 40 2.13 实验 13 点阵 LED 屏汉字显示实验...................................................................... 50 2.14 实验 14 AD 转换实验............................................................................................. 54 2.15 实验 15 DA 转换实验............................................................................................. 57 2.16 实验 16 LM35 温度传感器采集实验..................................................................... 60 2.17 实验 17 单总线温度传感器采集实验.................................................................... 68 2.18 实验 18 交直流减速电机控制实验........................................................................ 76 2.19 实验 19 外部中断光电计数控制电机实训............................................................ 79 2.21 实验 21 开环步进电机控制实训............................................................................ 80 2.25 实验 25 RS232 通信实验........................................................................................ 83
有关于YL-236的一些经验
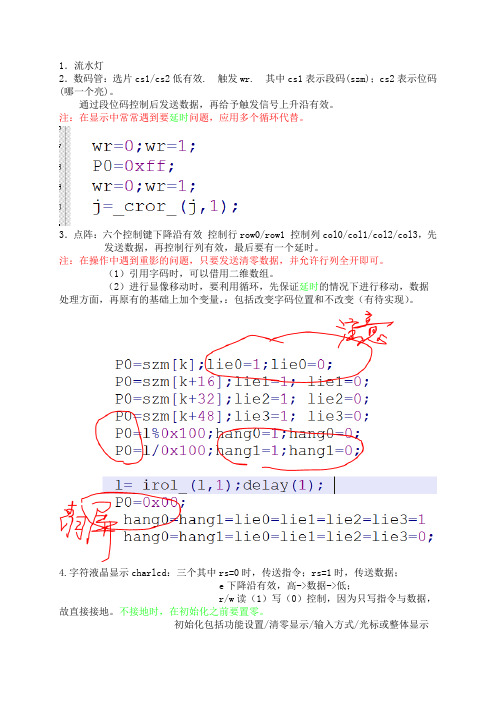
1.流水灯2.数码管:选片cs1/cs2低有效. 触发wr. 其中cs1表示段码(szm);cs2表示位码(哪一个亮)。
通过段位码控制后发送数据,再给予触发信号上升沿有效。
注:在显示中常常遇到要延时问题,应用多个循环代替。
3.点阵:六个控制键下降沿有效控制行row0/row1 控制列col0/col1/col2/col3,先发送数据,再控制行列有效,最后要有一个延时。
注:在操作中遇到重影的问题,只要发送清零数据,并允许行列全开即可。
(1)引用字码时,可以借用二维数组。
(2)进行显像移动时,要利用循环,先保证延时的情况下进行移动,数据处理方面,再原有的基础上加个变量,:包括改变字码位置和不改变(有待实现)。
4.字符液晶显示charlcd:三个其中rs=0时,传送指令;rs=1时,传送数据;e下降沿有效,高->数据->低;r/w读(1)写(0)控制,因为只写指令与数据,故直接接地。
不接地时,在初始化之前要置零。
初始化包括功能设置/清零显示/输入方式/光标或整体显示/显示光标;注:显示文字时,要用到字码,除了系统自带外,很多要自己写入(在初始化中),先写指令设置CGROM地址0x40(将CGROM送入AC中),再传入数据。
显示时以发送数据的形式发送,若这是第一个造字符,即发送xieshuju(0)。
时间的变化只需要是变量自加即可,然后加入数据的限制。
5.液晶显示12964:六个控制键包括rs=0时,传送指令;rs=1时,传送数据;rw读(1)写(0)控制,因为只写指令与数据,故直接接地。
不接地时,在初始化之前要置零。
e读写使能,高电平有效,下降沿锁定数据。
高-数据->低;cs1和cs2控制左右两片,高电平有效。
rst复位开关,低有效,高正常工作。
初始化包括:打开开关设置(0x3f)开显示cs1=1cs2=1;扫描页(8)+列(64),再送数据。
主函数:延时+初始化+数据(开cs/页/列/数据)。
基于YL-236的智能物流配送模拟控制系统的设计方案的实现

4. 软件部分设计
软件部分设计主要分成两部分,物料装箱和物料运送。 编程软件使用 C 语言。程序流程图 5 所示。 ■■4.1 物料装箱
if(!s1 &&fangkuai[1]+fangkuai[0]) // 系统检测有料,启动物料运送 { n1++; break; } lcd_dis();// 液晶显示 break;
直流电机、矩阵键盘、机械手、液晶显示等模块,设计框图 如图 2 所示,实物图如图 3 所示。
1. 系统简介
本智能物料配送模拟控制系统由待传输物料、计数传感 器、物料传送带、物料识别与装运区、地感线圈、电网电压 检测、控制面板等模块组成。示意图如图 1 示。
图 2 系统设计方案
图 3 设计实物图
3. 硬件部分设计
n1++; break; fangkuai[isB]--;// 方块数量减 1 n1=1; break;
case 13:
case 3:
5. 程序烧写
将编写好程序进行编译, 生成文件后缀名为 hex 的文件。 使用烧写软件 SLISP 进行程序烧写。如图 7 所示。
■■4.2 物料运送 (1)物料运送流程由运送车辆触发地感线圈而启动。 当系统检测到有运料车辆进入地感线圈时,运料开始。关键
图 5 程序流程图 图 6 物料箱数显示界面
语句如下: if(!s1 &&fangkuai[1]+fangkuai[0]){n1++;break;} (2)运料传送带把一箱物料由装箱区送到物料识别区 工位一位置上(由直流电动机转 1S 表示)。关键语句如下: case 2: dc_y(); // 直流电机转动,传送带送料
基于单片机的步进电机控制系统的设计(有全套CAD图纸)
基于单片机的步进电机控制系统的设计(有全套CAD图纸)全套CAD图纸,联系 695132052由于部分原因,说明书已删除大部分,完整版说明书,CAD图纸等,联系695132052基于单片机的步进电机控制系统的设计摘要:步进电动机由于用其组成的开环系统既简单,廉价,又非常可行,因此在打印机等办公自动化设备以及各种控制装置等众多领域有着极其广泛的应用。
本文用汇编语言编写电机的正转,反转,加速,减速,停止程序,通过单片机,电机的驱动电路以及相应的按键实现以上功能,并且步进电机的工作状态要用相应的LED管显示出来。
关键词:步进电机;驱动电路;单片机;转动The Design of the Control System of Step-Motor Based on SCMOrient Science&Technology College of Hunan Agricultural University,Changsha 410128,ChinaAbstract: The open-loop system which is composed by stepping motor is simple, cheep, but very practical, so there are very wide range ofapplications in printers and other officeautomation equipment and various control devices, and many other fields. In this article descibes one design of step-motor system based on microcontroller. It designs the system hardware circuit and the program of the preparation of a motor, reverse, speed up, slow down, stop is written by compile language. The above function are realized through the microcontroller, motor driver circuit and correspond keys, and the work state of stepper motor is displayed through the light-emitting diode.Key Words: Stepping motor;driving circuit;single chip microcomputer;rotation1 前言课题研究的目的和意义步进电机是一种将电脉冲信号转换成直线位移或角位移的控制微电机,其机械位移和转速分别与输入电机绕组的脉冲个数和脉冲频率成比例.通过改变电脉冲频率,可在大范围内进行调速.同时,该电机还能快速起动、制动、反转和自锁.此外,步进电机易于实现与计算机或其他数字元件接口,适用于数字控制系统.步进电机只需采用最简单的开环控制就可取得非常高的控制精度,且这种系统不需要反馈信号,系统硬件实施比较简单。
基于亚龙YL-236装置与Proteus软件为平台的单片机项目教学实践
、
提 高 学 生 学 习 的主 动 性 和 兴 趣 。 2 . 从 最 容 易成 功 的项 目着 手 我 们 尝 试 学 习 编 程 从 一 个 发 光 管 的 点 亮 和 熄 灭 开 始 。为 了让 学生 理 解 十六 进 制 与 二进 制 的 转 换 ,学 习A T 8 9 S 5 2 的各 引脚 功 能 , 学 习 点 亮 和 熄 灭 的指 令 , 明确 低 电平 为 点 亮 发 光 管 。 例 如 : M O V P O ,# 0 D B H :l 1 0 1 i 0 1 i - - 零 为 亮 ,就 是 将 立 即数 D B( 十六进制) 送给A T 8 9 S 5 2 的P 1 口 ,D B 转 换 为二 进 制 为 1 1 0 l 1 0 l 1 ( P O . 7 , P O . 6 ,P O . 5 ,P O . 4 P 0 . 3 ,P O . 2 P O . 1 ,P O . 0 ) ,说 明P O . 5 ,P O . 3 口输 出低 电平 。在 万 能 板 上 焊 上 A T 8 9 S 5 2 插座,l 8 、 1 9 脚接1 2 M H z 晶振 和 两个 3 0 P 电容 ,2 O 脚 接地 , + 5 V 电源 2 n  ̄ U 4 0 脚和3 1 脚 ,还 通 过 1 0 u F 电容 和 1 O K 电 阻加 到第 9 脚 进 行 上 电复 位 。在 P O . 5 ,P O . 3 口接 上两 个 L E D 的 负极 ,L E D 正 极 通 过几 百 欧 的 限流 电 阻接 到 + 5 v 电源 上 。通 电就 可 看 到两 个 L E D 点亮 。 若M O V P O ,# 2 4 H ;O 0 1 0 0 1 0 0 ,刚 好P O . 5 ,P 0 . 3 口接 上 的两 个L E D 熄 灭 ,其 它 口接 上 的L E D 点亮 。 至 于 点亮 和 熄灭 的时 间 ,则 由延 时子 程 序确 定 , 很好 修 改 的 。此 时 小 组任 务 为 三 路到 八 流 水灯 设 计 与制 作 , 八 路流 水 灯 又可 深 入 到3 2 路 跑 马灯 , 2 4 路 花 样 彩 灯 , 也 可 以利 用 P r o t e u s 软 件 仿 真 与 Y L 一 2 3 6 系 统进 行 测 试 。 3 . 项 目设 计 制 作 的层 层 深 入 接 下 来 我们 可 以进 行 独 立按 键 、光 电耦 合 、 动 态 数 码 管 、 液 晶 显 示 、5 1 2 点 阵显 示 、A D 、D A 转 换 、 红外 摇 控 、数 字 温度 采 集 与 显示 、矩 阵键 盘 控 制 、十 字 路 口交 通 灯设 计 、步进 电机 控 制等 电路 的制 作 。这 些 电路 元件 便 宜 , 易于 购 买 和 制 作 , 对提 升 学 生 兴趣 有 很 大帮 助 。所 以说 ,采 用 项 目教 学法 不 在 于教 师 讲 了 多少 理 论和 程 序 的 分 析 ,而 是你 的学 生学 到 了多少 ,运 用 知识 的 能 力 怎样 , 学生 能 否 做 出一 些 作 品 ,作 品 有没 有 技 术 含 量 和社 会 实用 性 。
全国技能大赛单片机236(1)

GLOBAL char variable printf (“System init ok\n"); GLOBAL bit flag */ #endif while(1);
}
宏定义
宏定义可以将一个指定的标识符来代表一个字符串, 用一个短的名字来代表一个长的字符串。 (1)实参如果是表达式容易出问题
#define S(r) r*r area=S(a+b);第一步换为area=r*r;,第二步被换为area=a+b*a+b; 宏定义的一般形式为: (r)*(r) 正确的宏定义是#define S(r) (2)宏名和参数的括号间不能有空格 #define 标识符 字符串 (3)宏替换只作替换,不做计算,不做表达式求解 (4)函数调用在编译后程序运行时进行,并且分配内存。宏替换在编译前进 举例: 行,不分配内存 (5)宏的哑实结合不存在类型,也没有类型转换。 #define PI 3.1415926 (6)宏展开使源程序变长,函数调用不会 (7)宏展开不占运行时间,只占编译时间,函数调用占运行时间(分配内存、 #define LCD_DATA P0 保留现场、值传递、返回值)
文件包含
#include的注意事项
死调用
a.h
b.h
c.h
可以用条件编译 解决此问题
重复调用
a.h c.h a.h d.h e.h
条件编译
一般情况下,编译器将对程序文件中的每一行都 进行编译,但是在有此情况下,希望满足一定条件后 才能编译。
例如DEBUG时,通过串口输出调试信息,调试完 成后这部分代码就没有必要编译了,可以通过一个宏 定义来告诉编译器是否编译串口输出代码。
SLISP
基于YL-236单片机实训装置的数字电压表的制作

加* 攥 : ………一 . … . … . 茧 一 0 。
图2 A D  ̄ 0 8 0 9 接 口电路
【 } … … … … … … 一 《譬 : 量
3 . 数字 电压表硬件模 块接 线 用Y L 一 2 3 6 实训 装置 实现 本任 务 要求 的硬 件 模 块接 线如 图3 所 示 。 该 电路 由主 机 模 块 ( M c U 0 1 )、显示模块 ( M C U O 4 )和A D c / D A c 模 块 ( M c u 0 7 )组成 。将 时钟源 1 M H Z 接 到A D C 电路 的 C L K 口, 由模拟 电压源提供0 ~5 v 输入 电压 。 地址 锁存 允许信 号A L E 由P 3 . 6 控制 通道地 址选 择 ,以w R 作 写选通 信号 。我们 将A L E 信 号 与s T A R T 信 号接 在一起 ,这样 使得A D O 8 0 9 在锁 存通 道地址的 同时 ,也启动 了A / D 转换 。
.
示。
s b i t AD w R - P 3 6 s bi t A D R D = P 3 7
脚 ^ D 转换子函数料料料料料扣 髀/ v o i d a d ( v o i d ) / / 读出A D 输出的值 { A D C S = O : / / 选择通道 d e l a y ( 1 O ) : / / 延时 l O m s 等待转换完成 P 0 = 2 5 5 : / / 将P O 置为 高 电平 ,准备读 取数
据
图3数字电压表硬件模块接线图 ຫໍສະໝຸດ 围 1系 统 设 计 方 案
v o l = A D C S ; / / 将转换结果存放到变量v o 1 中 ) 2 . 主 函数流程图 主函数流程图如图5 所 示。
步进电机控制系统方案设计书

课程设计任务书设计题目:微机步进电机控制系统设计设计目的:1.巩固和加深课堂所学知识;2.学习掌握一般的软硬件的设计方法和查阅、运用资料的能力;3.通过步进电机控制系统设计与制作,深入了解与掌握步进电机的运行方式、方向、速度、启/停的控制。
设计任务及要求:(在规定的时间内完成下列任务)任务:控制四相步进电机按双八拍的运行方式运行。
按下开关SW1时启动步进电机,按ESC键停止工作。
采用循环查表法,用软件来实现脉冲循环分配器的功能对步进电机绕组轮流加电。
要求对题目进行功能分析(四项功能:快速顺时针旋转,慢速顺时针旋转,快速逆时针旋转和慢速逆时针旋转),进行步进电机远程控制系统硬件电路设计,画出电路原理图、元器件布线图、实验电路图;绘制程序流程图,进行步进电机控制程序设计(采用8086汇编语言);系统调试、运行,提交一个满足上述要求的步进电机控制系统设计。
时间安排:(部分时间,某些工作可以自己安排重叠进行)具体要求:设计报告撰写格式要求(按提供的设计报告统一格式撰写),具体内容如下:①设计任务与要求②总体方案与说明③硬件原理图与说明④实验电路图与说明⑤软件主要模块流程图⑥源程序清单与注释⑦问题分析与解决方案(包括调式记录、调式报告,即在调式过程中遇到的主要问题、解决方法及改进设想);⑧小结与体会附录:①源程序(必须有简单注释)②使用说明③参考资料指导教师签名: 08年12月01日教研室主任(或责任教师)签名:年月日目录第1章需求分析11.1课程设计题目11.2步进电机介绍11.3课程设计任务及要求11.4软硬件运行环境及开发工具1第2章概要设计22.1设计原理及实现方法22.1.1 步进电机控制原理22.1.2微机步进电机控制系统原理图22.1.3 运行方式与方向的控制——循环查表法32.1.4步进电机的启/停控制——设置开关42.2微机步进电机控制系统设计流程图4第3章详细设计53.1 硬件设计与实现53.2软件设计53.2.1正向慢转子程序53.2.2正向快转子程序63.2.3反向慢转子程序63.2.4反向快转子程序63.2.5长延时子程序73.2.6短延时子程序7第4章系统调试与操作说明74.1系统调试74.2 操作说明8第5章课程设计总结与体会8参考文献8附录微机步进电机控制系统源程序9第1章需求分析1.1课程设计题目微机步进电机控制系统设计1.2步进电机介绍步进电机是一种将电脉冲信号转换成相应的角位移和线位移的电磁机械装置,是一种输出与输入数字脉冲对应的增量驱动元件。
亚龙 YL236说明书1

亚龙Y L-236型单片机应用实训考核装置实训指导书亚龙科技集团有限公司2009.05目录第一章51 单片机开发流程及开发环境介绍 (2)一、概述 (2)二、开发软件的使用...........................................................................................................................4 第二章单片机实训项目.............................................................................................................................8 实训一灯光闪烁实训.......................................................................................................................8 实训二跑马灯实训.........................................................................................................................10 实训三独立按键输入实训.............................................................................................................12 实训四光电隔离输入输出实训.....................................................................................................15 实训五金属检测实训.......................................................................................................................16 实训六动态数码管显示实训...........................................................................................................18 实训七矩阵键盘接口实训...............................................................................................................22 实训八继电器隔离控制实训...........................................................................................................26 实训九蜂鸣器演奏实训...................................................................................................................28 实训十8255 芯片扩展I O 口实训..................................................................................................34 实训十一字符型液晶显示模块控制实训.....................................................................................40 实训十二液晶显示模块控制实训...................................................................................................48 实训十三点阵L ED 屏汉字显示实训............................................................................................56 实训十四A D 转换实训..................................................................................................................61 实训十五DA 转换实训..................................................................................................................65 实训十六LM35 温度传感器采集实训............................................................................................68 实训十七单总线温度传感器采集实训.........................................................................................76 实训十八交直流减速电机控制实训.............................................................................................85 实训十九步进电机开环控制实训.................................................................................................88 实训二十R S232 通信实训.............................................................................................................93 第三章各实训模块电原理图.................................................................................................................96 第四章指令表.......................................................................................................................................108 第五章ASCⅡ码表. (113)第一章51 单片机开发流程及开发环境介绍一、概述对于初学者来说,熟悉开发流程和开发环境是进入单片机精彩世界的必要条件。
智能洗碗机控制系统制作任务书

智能洗碗机控制系统制作任务书一、工作任务要求请你在4h (240min)内,用YL-236型单片机应用实训考核装置制作智能洗碗机模拟控制系统,具体要求如下:1)根据智能洗碗机模拟控制系统的相关说明和工作要求,选用所需要的模块和元器件,在赛场提供的图纸上,画出你所设计的智能洗碗机模拟控制系统的模块接线图。
2)根据你画出的模块接线图,合理确定各模块的摆放位置,按照相关工艺规范连接智能洗碗机模拟控制系统的硬件电路。
3)根据你所设计的硬件电路以及工作任务的要求,编写智能洗碗机模拟控制系统的控制程序,存放在D盘以工位号命名的文件夹内。
4)调试你编写的程序,检测和调整有关硬件设置,完成智能洗碗机模拟控制系统规定的任务要求,最后将编译通过的程序“烧入”单片机中。
二、智能洗碗机模拟控制系统相关说明(一)智能洗碗机模拟控制系统说明智能洗碗机模拟控制系统由控制面板、温度测控器、刷子、分拣机械手、键盘、液晶显示器、数码管等部分组成。
1.控制面板2.水温测控器水温测控器使用LM35温度模块模拟。
3.分拣机械手使用YL-G001型智能物料搬运装置模拟分拣机械手。
分拣动作为:机械手从工位一或工位二提升一个金属或陶瓷餐具到工位三上方。
4.液晶显示器使用12864液晶显示器显示有关信息。
5.数码管6.声音报警系统声音报警由主机模块中的蜂鸣器实现。
7.独立按键使用独立按键SB1、SB2增加要清洗的陶瓷和金属餐具数量。
8.LED使用LED0作为系统电源指示灯。
8.电源总开关使用钮子开关SA1来模拟。
钮子开关SA1打到上面,表示“开电源”,打到下面,表示“关电源”。
三、系统工作要求(一)系统初始状态要求1. 系统上电后,将钮子开关SA1打到上面,系统开机进行初始化:LED0电源灯亮;在12864液晶显示器显示“欢迎使用”;数码管显示当前温度和默认设定时间;机械手复位:升到高位,移到工位二,手爪放开待命。
2.示“密码正确”,再次按下“确定”键进入系统设置界面。
基于YL—236步进电机控制系统的设计

基于YL—236步进电机控制系统的设计作者:王永贵来源:《消费电子·理论版》2013年第01期摘要:通过YL-236实训设备完成步进电机定位系统,能够准确定位步进电机的位置。
整个系统采用模块化设计,结构简单、可靠,通过人机交互接口可实现各功能设置,操作简单,易于掌握。
关键词:步进电机;单片机;系统设计中图分类号:TP271 文献标识码:A 文章编号:1674-7712 (2013) 02-0049-02一、引言单片机控制的步进电机广泛地应用于工业自动控制、数控机床、机器人、卫星天线定位系统以及各种可控机械工具等。
随着经济的发展,步进电机的应用领域更加广阔,同时也对步进电机的运行性能提出了更高的要求。
该文采用当前流行的AT89C51单片机来控制步进电机,实现其正反转以及准确定位等功能。
二、控制系统设计(一)控制系统要求1.系统设置四个按键(S1、S2、S3、S4)和三位数码显示,S1和S2的功能分别为位置设定加与减的控制;S3的功能是启动步进电机;S4的功能是步进电机复位归零;三位数码显示步进电机的目的位置值。
2.系统启动前先把步进电机的指示刻度手动归零,系统上电后,电机不转,数码显示“000”。
3.系统启动后可以按S1或S2按钮设置步进电机的目的位置(“000”-“160”任意可调),按S3按钮启动步进电机,使步进电机到达目的位置后停止。
这时又可以设置步进电机的目的位置,按S3按钮使步进电机走到新的目的位置,也可按S4按钮,使步进电机复位归零。
4.注:当电机运行时,按键不起作用,只有当电机停转时,才能控制按键。
(二)系统软件设计的整体组成本系统选择c语言对单片机进行程序设计,用c语言编程,编译速度快,有良好的可移植性,而且c语言有完善的模块程序结构,能大大缩短开发周期,便于改进和扩充。
1.系统设计程序流程图2.系统设计参数设置(1)步进脉冲信号CP。
步进脉冲信号CP用于控制步进电机的位置和速度,也就是说,驱动器每接受一次CP脉冲,就驱动步进蛋卷旋转一个步距角,CP脉冲的频率改变,则同时使步进电机的转速改变,控制CP脉冲的个数,则可以使步进电机精确定位,这样就方便达到步进电机调速和定位的目的。
步进电机控制系统设计

步进电机控制系统设计基于单片机的步进电机控制电路板设计摘要随着微电子和计算机技术的发展,步进电机的需求量与日俱增,它广泛用于打印机、电动玩具等消费类产品以及数控机床、工业机器人、医疗器械等机电产品中,其在各个国民经济领域都有应用。
研究步进电机的控制系统,对提高控制精度和响应速度、节约能源等都具有重要意义。
步进电机是将电脉冲信号转换为角位移或线位移的机电元件。
步进电机控制系统主要由步进控制器、功率放大器和步进电机组成。
用单片机控制和软件代替步进控制器,电路简单,成本低,可靠性大大提高。
软件编程可灵活生成不同类型步进电机的励磁序列,控制各种步进电机的运行方式。
本设计是采用at89c51单片机对步进电机的控制,通过io口输出的时序方波作为步进电机的控制信号,信号经过芯片uln2021驱动步进电机;同时,用4个按键来对电机的状态进行控制,并用数码管动态显示电机的转速。
该系统由硬件设计和软件设计两部分组成。
其中,硬件设计包括AT89C51单片机最小系统、电源模块、键盘控制模块、步进电机驱动(集成达林顿uln2022)模块、数字显示(sm420361k数码管)模块、测速模块(含霍尔芯片ugn3020),以及各模块在电路板上的有机组合。
软件设计包括键盘控制程序、步进电机脉冲、数码管动态显示和速度信号采集模块。
最后,控制步进电机的旋转方向和速度,并在LED数码管上动态显示步进电机的转速,实时监控和显示速度。
该软件在keil软件环境中编辑*************第一章导言1.1课题背景在当今社会,电机在工农业生产和人们的日常生活中起着非常重要的作用。
步进电机是最常见的控制电机,广泛应用于各个领域。
步进电机作为执行机构,是机电一体化的关键产品之一,广泛应用于各种自动控制系统中。
随着微电子和计算机技术的发展,步进电机的需求量与日俱增,在各个国民经济领域都有应用。
步进电机是一种将电脉冲转化为角位移的执行机构。
当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(称为“步距角”),它的旋转是以固定的角度一步一步运行的。
基于yl-236的生产线分拣系统设计

基于YL-236的生产线分拣系统设计摘要随着电子技术及智能控制技术的飞速发展,自动控制系统的适应能力逐渐增强,高度智能化也正在逐步成为现实。
以单片机为核心实现的自动控制装置因其体积小、性价比高、功能强、可靠性高、简便易行而得到广泛应用。
气动技术与计算机技术、信息技术等结合形成智能控制气动系统,已经普遍存在于现代自动化领域且仍处于进一步大规模研发阶段。
本课题是设计实现一个生产线分拣系统,完成对产品(以两种颜色高尔夫球为模拟产品对象)的称重、检测以及分拣功能。
此系统综合了电类专业的电工电子技术及电气控制技术、传感检测技术与仪表、微机控制技术及接口等课程的内容。
本系统以YL-236型单片机控制装置为硬件基础,该系统由单片机主机模块、智能物料搬运装置、指令模块、继电器电路模块、电源电路模块、传感器电路模块、显示模块等部分组成,完成后既可以移植到柔性自动生产线上作为产品检测分拣的重要一环,又可以作为大中专院校学生基于生产过程的综合性实训项目。
本论文在简单分析了设计研究的重要性,其研究背景及现实意义后,提出了总体的设计方案,依据设计方案在详细分析研究YL-236各模块功能的基础上,选用适合功能实现的模块,组成硬件电路,通过该装置配备的ME-52HU仿真器模块,代替主机芯片以适应多次程序擦写调试,程序编写是在与此仿真器对应的MedWinV3集成开发环境中,通过不断地调试,实现该设计的称重、识别、抓取、分类、包装,以及状态显示、故障报警等功能。
关键词:YL-236教仪生产线分拣系统智能控制系统Design of Sorting Device Production Line Based on YL-236AbstractWith the rapid development of electronic technology and intelligent control technology, automatic control systems’ adaptabili ty is gradually increasing and high intelligence is becoming a reality step by step. The automatic control device, cored on the single chip microcomputer, is widely used due to its small size, high performance price ratio, strong function, high reliability ,and simplicity, The way to combine the pneumatic technology with computer technology and information technology, thus forming the intelligent control of pneumatic system, has been widely used in modern automation field,and is still in the stage of further large-scale development. The aim of thesis is to design a production line sorting system, so that to complete the functions of (with two colors of golf as the object) weighing, detection ,and sorting. This system combines the content of technology spec ialty’s courses, such as electrical and electronic technology, electrical control technology, sensor technology and instrument, microcomputer control technology and interfaces. This system is based on the hardware of YL-236 single-chip microcomputer control device, mainly composed of host module, intelligent material handling device, command module, relay module, power supply module, sensor module and display module. After being completed, it can be one important annulus once transplanted to the flexible automatic production line to test or sort products, and it is also can be used as comprehensive training project based on the production process for college students.In this thesis a simple analysis of the importance of design research, the research background and significance, and proposed the overall design scheme, on the basis of detailed analysis and Research on the YL-236programme in the design of each module function, select function realizationmodule, hardware circuit,ME-52HU emulator module via the device equipped with, instead of host chip in order to adapt to the times of program erasedebugging, program written in MedWinV3 integrated development environmentwith the simulator in the corresponding, through continuous debugging, the design of weighing, recognition, grab, classification, packaging, and state display, fault alarm etc..Key words:YL-236 ordinances; Production line sorting system;Intelligent control system目录第一章引言1.1 生产线分拣系统 (1)1.1.1 生产线分拣系统的概述 (1)1.1.2 生产线分拣系统的发展现状 (1)1.2 单片机实训设备的发展现状 (2)1.3 课题研究的内容 (3)1.4 课题研究的目标和主要工作 (3)第二章方案设计论述2.1 模块的功能要求 (5)2.2 模块的设计方案 (5)第三章生产线分拣系统的硬件设计3.1 YL-236 单片机控制装置简介 (9)3.2 主机模块电路 (9)3.3 显示模块电路与接口设计 (12)3.4 指令模块电路与接口设计 (16)3.5 重量信号采集电路设计 (17)3.6 传送带电机与闸门电机电路设计 (20)3.7 分拣装置电路 (26)3.8 电源电路 (27)3.9 主机端口分配与扩展电路设计 (27)第四章生产线分拣系统的软件设计4.1 软件设计简介 (28)4.1.1 设计过程概述 (28)4.1.2 开发环境的搭建 (29)4.2 显示、指令模块程序设计 (29)4.2.1 数码管显示程序设计 (29)4.2.2 12864 液晶显示程序设计 (30)4.3 串口通信程序设计 (38)4.4 重量采集程序设计 (38)4.5 颜色识别程序设计 (39)4.6 传送带电机程序设计 (40)4.7 分拣程序设计 (40)4.8 报警程序设计 (41)第五章试验平台的搭建与系统调试5.1 试验平台的搭建 (42)5.1.1 硬件调整 (42)5.1.2 软件调试 (42)5.2 功能小结 (44)第六章讨论6.1 成果 (45)6.2 展望 (45)参考文献 (46)致谢 (48)个人简历在学期间发表的学术论文及研究成果 (49)附录 (50)第一章引言在自动生产线的各环节中,分拣是非常重要的一环。
对基于YL-236型实训装置的项目教学的几点思考
对基于 YL-236型实训装置的项目教学的几点思考摘要:针对职业院校实训教学中大量采用亚龙YL-236型单片机控制功能实训考核装置的现状,结合《单片机技术应用》项目教学改革和职业技能大赛,笔者提出了教学和培训过程中的一些思考跟大家进行探讨,以便更好地利用该设备提高教学质量,服务人才培养。
关键词:单片机;YL-236;项目教学;技能大赛亚龙YL-236型单片机实训装置(以下简称YL-236),是浙江亚龙公司推出的单片机控制功能实训控考核装置,同时也是全国职业院校技能大赛中职组“单片机控制装置安装与调试项目”的指定参赛设备。
经过五年的学习和竞赛,笔者对于YL-236在实训教学和技能培训中的的使用有了一些经验和体会,现总结如下:1 YL-236设备的对单片机项目教学的意义《单片机技术应用》一课,由于知识的抽象和琐碎,一直是中职教学中的一个难点所在,老师难教,学生难学,以至于很多中职学校都取消了这门课程。
然而,大多数电子产品都和单片机的使用是不可分割的,单片机在生产、生活中的应用是越来越广泛,所以对于电子专业的中职学生来讲,了解一定的单片机知识,能够利用单片机实现简单的控制是一项基本的技能,为了完成对技能的培训,原来的以理论为主的教学模式已经无法满足要求,在这样前提下,采用项目教学的方式,更利于提升教学质量,真正实现技能培养的目标。
YL-236单片机控制功能实训考核装置,根据功能把设备模块化,以AT89S52主机模块为核心,以各种外围设备模块为配套。
通过不同模块的组合来实现不同的控制功能。
在教学过程中,弱化了对单片机内部结构和功能的学习,更侧重于外部设备的连接和基本控制功能的实现,通过项目任务的设置,使单片机的相关知识,融入到一个一个的项目中,由浅及深,并且利用显示模块、电机模块、机械手等外设,将结果直观的展现在学生面前,提高了学生的学习兴趣。
当学生看到自己完成了一项任务时,内心的成就感和满足感,会促使他们能主动投入到后面项目的学习中,学习的主动性增加了,教学效果也得到了明显提高。
步进电机驱动与控制系统的设计

本次演示对步进电机驱动与控制系统进行了详细的设计与分析。通过对步进 电机驱动方式的介绍,探讨了电压驱动、电流驱动和位置检测等驱动原理和实现 方式;针对步进电机的控制方式进行了研究,包括位置控制、速度控制和力矩控 制等。在此基础上,结合实际应用情况,讲解了如何使用单片机、PLC等设备实 现对步进电机的驱动和控制。对于提高步进电机的控制精度和响应速度具有一定 的指导意义。
2、PLC驱动控制
PLC(可编程逻辑控制器)是一种广泛用于工业控制系统的设备。在步进电 机驱动与控制中,PLC也可以发挥重要作用。通过编写相应的程序,PLC可以实现 对步进电机的精确控制。与单片机相比,PLC具有更强的抗干扰能力和更高的可 靠性,因此在一些复杂工业环境下,PLC更为适用。
结论与展望
2、电流驱动
电流驱动是通过调节加在电机绕组上的电流来实现对步进电机的控制。与电 压驱动不同的是,电流驱动需要考虑电机的磁滞效应和涡流效应等因素,因此需 要采取特殊的控制策略。在实际应用中,通过使用电流反馈和控制电路来实现对 电机电流的精确控制,进而实现对电机转速和转向的控制。
3、位置检测
位置检测是一种通过检测步进电机转子的位置来实现对电机精确控制的方法。 通过在电机转子上安装感应器或编码器,可以实时检测转子的位置,并将位置信 息反馈给控制系统。控制系统根据反馈的位置信息,实时调整加在电机绕组上的 电压或电流,以实现电机的精确定位。
6、医疗人才队伍建设。国家应该加强医疗人才队伍建设,包括医疗人才的 培养、引进、使用等方面。同时,应该加强对医疗人才的培训和管理,提高医疗 人才的素质和能力。
最后,国家应该加强对医疗卫生体系建设的投入和管理,确保医疗卫生体系 的建设符合社会需求和人民利益。同时,应该加强对医疗卫生体系建设的评估和 监管,确保医疗卫生体系的建设符合科学规律和法律法规。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
、
引 言
单片机控制的步进电机广泛地应用于工业 自动控制、 数控机
2 . 系统 设计参数 设置 ( 1 )步进脉冲信号 C P 。步进脉冲信号 C P用于控制步进电
床 、机器人、卫星天线定位系统以及各种可控机械工具等。随着 机 的位置和速度,也就是说,驱动器每接受一次 C P脉冲 ,就驱 经济的发展,步进电机的应用领域更加广阔,同时也对步进电机 动步进蛋卷旋转一个步距角,c P脉冲的频率改变 ,则 同时使步
u , ; h a r k e y l , k e y 2 . k e y s . k e y 4
O1 0
4
8
O . 4 5。
0.2 2 5。
3 . 系统设计程序编写 ( 编 写部分)
# i n c l u d e < r e g 5 2 i f( k e y 2 =2 5 5 ) k e y 2 = 4 1
Байду номын сангаас
编译速度 快 , 有 良好的可移植性, 而且 C 语 言有完善 的模块程 序结构,能大大缩短开发周期,便于改进 和扩 充。
摘 要 :通过 Y L - 2 3 6实训设备 完成 步进 电机定位 系统 ,能够 准确定位 步进 电机的位置。整个 系统采用模 块化设 计 ,结构简单、可靠,通过人机 交互接 口可实现各功 能设置 ,操作 简单 ,易于掌握。 关键词 :步进 电机 ;单片机 ;系统设计 中图分类号: T P 2 7 1 文献标识码:A 文章编号:1 6 7 4 - 7 7 1 2 ( 2 0 1 3 ) 0 2 - 0 0 4 9 - 0 2
S 4 按钮 ,使步进 电机 复位 归零 。 4 . 注: 当电机运行时 , 按键不起作用 , 只有 当电机停转时 , 才能控制按键 。 ( 二 )系统软件设计的整体组成 本系统选择 C 语言对单片机进 行程序 设计 , 用C 语言编程,
细分数
2
步距角
0. 9。
O O l
v o i d№l n 0 / , { i 瓣毁
u c h  ̄ c t a b l e [ ] : ( o x c O , 0 x f 9 , 0 x a 4
O x b O , 0 x 9 9 , 0 x 9 2 , 0 x 8 2 0 x f 8 , O x S O O x 9 0 }
端} l 定j c 路;
i f ( S j = = 0 j
t c , h o r T  ̄ . B 1 [ ] = { 0 x f f 0 x f, 0 x f f , 0 x f £ O x f f , 0 x f f ,
0 x f f , 0 x f n
{ 打羽 定时撩和杯 意位,程f # 昭: J
1 . 系统设 置四个按键 ( S 1 、 s 2 、s 3 、S 4 ) 和三位数码显示 , S l 和s 2 的功能分 别为位 置设 定加与减 的控制 ; S 3 的功能是启动
( 3 ) 细分数及相电流的设定。 Y L - 2 3 6 设备上用的是S J - 2 3 0 M 2 步进 电机 ; S 4 的功能是步进 电机复位归零; 三位 数码 显示 步进 驱动器 ,它可 以通过驱动器上的拨盘 开关来设定细分数及相电
1 f ( S l  ̄ = = 嘴& c 0 u n t = = 0 )
u c h a r T 墟2 c ] : { O x f e . 0 x f d . O ) f f b . 。 x .
0 x e f . O x d f . 0 x b f . O x T f }
( 盟垃键, 程跨崔 ; 『 ; )
的运行性能提出了更高的要求。该文采用当前流行 的A T 8 9 C 5 1 单 进 电机的转速改变, 控制 C P脉冲的个数 ,则可 以使步进 电机精
片机来控制步进电机 ,实现其正反转 以及准确定位等功能。
二 、控 制 系统 设计 ( 一 )控 制系 统 要 求
确定位,这样就方便达到步进 电机调速和定位的 目的。 ( 2 )方 向电平信号 D I R 。方 向电平信号 D I R用于控 制步 进 电机 的旋转方 向。 此端高 电平时 , 电机一个转 向, 低 电平时, 另一个转 向。电机换 向必须在 电机停止后再进行 。
电机 的 目的位置值 。
电后 ,电机不转 ,数码显示 “ 0 0 0 ”。
, 流。在控制器评论允许的情况下,应尽量选择高细分数。
拨盘设置
2 . 系统启动前先把步进 电机 的指示刻度手动归零, 系 统上
3 . 系统启动后可 以按 S 1 或S 2 按钮 设置步进 电机 的 目的位 置 (“ 0 0 0 ”一“ 1 6 0 ”任意可调),按 S 3按钮启动步进 电机 ,
i . 系统设计程序流程图
# d e f i n e u c h a r u n s i g n e d c h a r # d e f i n e u i n t u n s i ne g d i n %
i f ( c o u n t = = 一 l } c o u n t = 1 5 9 ) e I s e k e y 2 : O ; J
消 费 电子
2 0 1 3年 1月下
C o n s u me r E l e c t r o n i c s Ma g a z i n e
计算机科学
基于Y L 一 2 3 6 步进电机控制系统的设计
王永贵
( 皖江职 业教 育中心 学校 ,安徽马鞍 山 2 4 3 0 0 0 )
拨盘了 f l 关设定0 N = 0 ,O F F = I 细分设定 ( 位1 、2 、3 )以0 . 9 。/ 1 . 8 。电机为例 位1 2 3
00 0
使步进 电机到达 目的位置后停止 。 这时又可 以设置步进 电机 的 目的位置 ,按 s 3按钮使步进 电机 走到新的 目的位置 ,也可按