DIVA-GIS_manual_7
acgis

1 GIS网络:一个能够相互贯通的GIS对象相连的图,可模拟路径、交通、管线、设备、水文学。
2空间分析:是基于地理对象的位置和形态的空间数据的分析技术,其目的在于提取空间信息或者从现有的数据派生出新数据的,是将空间数据转变为信息的过程。
3 Clip:用一个多边形图层去剪裁另一个图层,:根据一个图层剪切另一图层中的要素。
4融合:基于属性的要素合并这个功能可以将主题中某一字段取值相同切相邻的要素合并成一个要素5矢量数据结构:是地理要素的一种概念模型,在矢量模型下,地理要素被表现为点、线、面等几何形式。
6地理配准:是为了使得影像数据可以和GIS矢量数据集成在一起,而为影响数据指定一个参考坐标系的过程。
7空间数据:是指以地球表面空间位置为参照的自然、社会、和人文经济景观数据,可以是图形、图像、文字、表格、和数字等。
8 mask:分析掩膜定义了输出栅格的范围,掩膜是根据已存在的栅格的“有效数据”区域形成的,而不是矩形区域。
9重分类:将栅格图层的数值进行重新分类组织或者重新解释。
10缓冲分析:是给定空间对象或集合后获得的它们的邻域。
11合并:图层合并这个功能将两个图层进行联合运算,派生新的图层。
12数据处理:是基于已有数据派生新数据的一种方法。
13可视性分析:实质上属于对地形进行最优化处理的范畴。
一个GIS应该包括那些基本功能?获取数据、存储数据、数据查询、数据分析、数据可视化、输出数据地理配准(影像)的步骤?1 校准栅格数据2坐标变换3检查均方差4重采样--矫正:生成新的影像文件Shape文件数模型的特点?1 shape 文件类型是基于其非拓扑性2shape 文件类型包括点、线、面三种3 一个shape 文件中只能存储一种类型的文件空间分析的步骤1确定问题并建立分析的目标和要满足的条件2针对空间问题选择合适的分析工具3准备空间操作中要用到的数据4定制一个分析计划然后执行分析操作5显示并评价分析结果S hape和cover都表示矢量数据结构不同的是shape 是非拓扑型cover 是拓扑性TIN与DEM都可以表示现实世界的地理特性,但是TIN是一种矢量数据格式,而DEM是一种栅格数据。
Cadence使用手册经典

一.File 菜单 在 File 菜单下,主要的菜单项有 New、Open、Exit 等。在具体解释之前我们不妨先理 顺一下以下几个关系。library(库)的地位相当于文件夹,它用来存放一整个设计的所有数据, 像一些子单元(cell)以及子单元(cell)中的多种视图(view)。Cell(单元)可以是一个简 单的单元,像一个与非门,也可以是比较复杂的单元(由 symbol 搭建而成)。View 则包含 多种类型,常用的有 schamatic,symbol,layout,extracted,ivpcell 等等,他们各自代表什 么意思以后将会一一提到。 New 菜单项的子菜单下有 Library、Cellview 两项。Library 项打开 New Library 窗口, Cellview 项打开 Create New File 窗口,如图 1-2-1 和 1-2-2 所示。
i——在光标处插入正文; x——删除光标处的字符; :wq——存盘退出; 要记著一点,在插入态处,不能打入指令,必需先按〈Esc〉键,返回指令态。假若户不知 身处何态,也可以按〈Esc〉键,不管处于何态,都会返回指令态其它的一些命令请读者自己参 阅有关的书籍。
§ 1-2 建立可进行 SPICE 模拟的单元文件
icfb&↙(回车键),其中& 表示后台工作。Icfb 调出1-1-1Candence 主窗口 二.在 PC 机上使用 1)将 PC 机的颜色属性改为 256 色(这一步必须); 2)打开 Exceed 软件,一般选用 xstart 软件,以下是使用步骤: start method 选择 REXEC(TCP-IP) ,Programm 选择 Xwindow。Host 选择 10.13.71.32 或 10.13.71.33。host type 选择 sun。并点击后面的按钮,在弹出菜单中选择 command tool。 确认选择完毕后,点击 run! 3)在提示符 ZDASIC22> 下键入:setenv DISPLAY 本机 ip:0.0(回车) 4)在命令行中(提示符后,如:ZUEDA22>)键入以下命令
Delft3D-Installation_Manual
4.10 Restarting vendor daemons on a license Server ...................................... 4–10
5
Installing Delft3D on Windows ........................................................................... 5–1
4.8.2 Registry keys................................................................................ 4–9
4.9 Running a license server with license files for Delft3D version 3.23.04 or lower generates errors ........................................................................... 4–9
2.2 General definitions.....................................................................................2–1
2.3 Overall structure for Delft3D.....................................................................2–2
1.3 Typographical conventions ........................................................................1–2
DIVA-5_Tutorial

DIVA-GIS v5 - TutorialFebruary 2005This tutorial guides you through some commands in DIVA-GIS, in order to become familiar with the some of the most basic aspects of the program.More details can be found in the manual and in the exercises.The data used in this tutorial can be downloaded from the Internet at. You can place these in any folder, but here we assume they are in the “C:\DIVA\tutor\” folder, and we will refer to this folder as the "data folder".1. LayersStart DIVA-GIS and Click on Layer – Add LayerThe “Open” window appears. In this window, go to the data folder and select the file bo_mroad and press the Open button.Again do Layer-Add Layer and select the file bo_department.shp and press “Open”.Two “layers” should now be present in the "Table of contents (TOC)" (left hand side of the window) of DIVA. You can see these layers on the map, by clicking onthe checkboxes next to their names in the TOC. After that, your screen should show a map of the Departments and main roads in Bolivia. This map was created by adding two “shapefiles” to the map. Shapefiles are files representing points, lines, or polygons (areas) and associated data.Right-click on the "bo-department" layer in the TOC, and select "Add to overview map".Now try out zooming in and out, and “pan” (moving the center of the map after zooming in), using the commands from the Map menu or from this toolbar: ArrayNotice how you can also pan through your map by clicking on the overview map(when the map is zoomed in).To change the way this layer is displayed, click once on the bo_department layerin the table of contents (not on the checkbox, but next to it). This makes thatlayer the “active Layer”. Now click on Layer/Properties and the Propertieswindow appears. (This window also appears after double clicking on the layer in the table of contents). Now you can change display properties such as the color and border size.Change the Style to "SolidFill", and the Fill Color to green (double click on the rectangle in the Preview to show the color palette). Change the label to"Departments". Click on Apply and Close . The departments layer should now be green.Now go to the Properties of the departments layer again. Go to the “Unique” tab, select the field "Departments", press Reset Legend and Apply . Each department should now have a different color.Change the color back to green.Double click on bo_mroad (in the table of contents) and change the Style of the lines to "Dash line", the Color to red, the Size to 3. Change the label to "Main roads".To be able to see the roads layer, drag (click on it and move it while keeping the mouse button down) it to the top in the TOC.Fill style Border on/offSave your work using the Save or Save As commands in the Project menu and save the “Project” in a folder of your choice. Then use Project -Close to close the project and Project -Open to open it again. (note that you can also pick this file from the "recently used files" list in the Project menu).The project file only stores the names of layers and some information about them, not the data. If you want to save the project with the data in a single file, you can use File-Export . This can be handy for sending a project to somebody else.Make the bo_department layer active by clicking on it in the TOC.Choose the option Layer – Identify Featurefrom the Layer menu or from the toolbar:After that, click on any part of the map of Bolivia. The Identify window will appear and show the data that are associated with the part of the map you clicked on (e.g., the name of the department).Click on Climate/Point and then click anywhere on the map (where there is land) to find out what the climate is like at that location (if you have a climate database installed – you can download these from the diva-gis website).To see the whole table related to the active layer, click on Layer-Table or on this icon:You can select a record in the database and then use Highlight, Pan To or, Zoom To, to see the location of the object related to this record on the map.You can save a map as a graphics file using Project/Map to Image and copy the map to the clipboard. Try pasting it again into Powerpoint.You can also make a more elaborate map by clicking on the "image" tab at the lower right of the DIVA window. There you can add a legend, scale, and more (e.g. text).Start with adding the main map. Then you can set where other objects are displayed by selecting them in the toolbar, setting some options on the left hand panel, and then by clicking on the map.It may take a couple of rounds of trial and error to get the placement and properties right. You can repeat the placement of an object (e.g. scale bar) until you have found the place you like. The settings are stored in the text boxes and the objects can be placed on the exact spot on the map again by pressing OK (instead of clicking on the map). Thus, you can go through all the objects, and then start all over again with a fresh map, and only press the OK buttons.In some cases it can be easier to add additional pieces to the map in Powerpoint or comparable program.Open the file bolivia_wp.txt with Excel (or other spreadsheet program). Each record (row) in this file describes localities where wild potatoes have beencollected.coordinate data in decimal degrees. Use the columns LATD, LATM, LATH,LOND, LONM, LONGH. LATD y LOND have degrees data, LATM y LONGM have decimal minutes (not minutes and seconds)), LATH and LONGH indicate the hemisphere (N/S and E/W). To calculate Latitude use a formula like“=-1*(LATD+LATM/60)” (but replace the variable names by the cell references in excel). The values in the first data row have already been calculated.It is important that in Excel you set the format of the cells to a certain number of decimals (e.g. 5). Otherwise, all the decimal numbers may be cut off when exporting the file.When you are done save the file under a different name. After that, save it as a TAB delimited text file again (.TXT).Use Data/Points (text) to Shapefile to create a shapefile from the TXT file you just made with Excel. Select the TXT file as Input File, and for Longitude and Latitude select the columns LONGITUDE and LATITUDE.Click on Output file, Set the name of the output file to "bolivia_wp". Click Apply.When the program finishes it will add the shapefile to the map.A layer showing locations where wild potatoes were collected in Bolivia should be shown. Your screen should look similar to this:Now add a new layer "bol_alt.grd" to the map, rearrange the layers and zoom in to make a map like this:This layer is made from a "gridfile", which is a different file type than the files previously used. It does not store features such as points, lines, or polygons, but rather it stores a rectangular raster (grid) of values. In this case, the values represent altitude (in meters above sea level).Make the bol_alt the active layer and move your mouse over the map. Note that you can see the values of the layer displayed on the status bar (the bottom of the window).2. Data analysisLet’s make a new gridfile with the number of observations of wild potatoes in Bolivia. Make Bolivia_wp the active layer, and then click on Analysis – Point to Grid -Richness.Go to the Parameters tab and select the field "Species".Go back to the Options tab, choose an output filename and press Apply .When the program is finished, drag the bo _department layer to the top and change (in the Properties window) its Style to No fill.Choose which field in the database shouldbe used for analysis Define parameters (x, y, gridfile.The map shows a grid that consists of five colors, each indicating a range of the number of species per grid cell.When the grid is the active layer, the row and column number and the value of the cell are shown at the bottom of the screen, when moving the mouse over the map.To change the way the grid is displayed and show other ranges (e.g.,: 1-10, 10-20, etc), or individual values, double click on the grid. The grid Properties window appears. Click on a value in the “To” column and change it. You can also insert more rows (ranges) using “Insert row” (+).11Make some more grids. First activate the bolivia_wp layer. Then selectAnalysis/Point to Grid/Richness . Select Define Grid-Options. In the Adjust With use Rows/Columns. Change the resolution (size) of the cells to 0.5 degrees and click OK. Then click Apply in the Create Grid window. The result is a grid with smaller cells than the previous grid (and hence with different values).Make another grid using the same data, but now of the number of observations per grid cell. In Output Variable select Richness / Number of Observations . Choose an output file name and click on Apply .Save your project (Project / Save ).coordenates (derived from thepoints)Cell size rows Returns to the default values Define the output area by drawing it on the screen.。
ARCGIS工具中英对照总结

Analysis Tool: 分析工具Extract 提取Clip 剪切Select 选择Split 拆分Table Select 表选择Overlay 叠加分析Erase 擦除Identity 查看Intersect 相交Symmetrical Difference 对称差Union 联合Update 更新Proximity 邻域分析Buffer 缓冲区Multiple Ring Buffer 多环缓冲区Near 临近Point Distance 点距离Statistics 统计表Frequency 频度Summary Statistics 总结统计Cartography Tool: 绘图工具Masking Tools 掩模工具Cul-De-Sac Masks Cul-De-Sac 掩模Feature Outline Masks 要素轮廓线掩模Intersecting Layers Masks 相交图层掩模Conversion Tool: 转换工具From Raster 从删格到... Raster to ASCII 删格到ASCII Raster to Float 删格到浮点Raster to Point 删格到点Raster to Polygon 删格到面Raster to Polyline 删格到线ArcGIS 9 ArcToolbox 中英文对照表① 3D Analyst Tools 三维分析工具Conversion 转换TIN 三角计算TIN 域值TIN 多边形标志TIN 节点TIN 边TIN 到栅格栅格转TINFunctional Surface 表面功能插值形状表面体积表面点表面长度视线Raster Interpolation 栅格修补克里金地形到栅格曲线拟合用文件地形到栅格自然邻域趋势距离权重倒数栅格计算Raster Math乘减加取整浮点除Raster Reclass 栅格重分类切片查找用ASCII 文件重分类用表重分类重分类Raster Surface 栅格表面坡向坡度填/挖山影曲率等高线等高线列表观察点视阈Terrain 地形地势地带领域TIN Creation 创建TIN编辑TIN TIN SurfaceTIN 创建TIN 表面TIN 坡度TIN 方位TIN 等高线多边形插值成多个面② Analysis Tool: 分析工具Extract Clip Select Split提取剪切选择拆分Table Select 表选择Overlay Erase叠加分析擦除Identity 查看Intersect 相交Symmetrical DifferenceUnion 联合对称差Update Proximity Buffer更新邻域分析缓冲区Multiple Ring Buffer 多环缓冲区Near 临近Point Distance Statistics Frequency点距离统计表频度Summary Statistics 总结统计③ Cartography Tool: 绘图工具Masking Tools 掩模工具Cul-De-Sac Masks Cul-De-Sac 掩模Feature Outline Masks 要素轮廓线掩模Intersecting Layers Masks 相交图层掩模④ Conversion Tool: 转换工具From Raster Raster to ASCII Raster to Float Raster to Point Raster to Polygon Raster to PolylineTo CAD从删格到...删格到ASCII删格到浮点删格到点删格到面删格到线到CADAdd CAD Fields Create CAD XData Export to CAD Set CAD AliasTo Coverage添加CAD 字段创建CAD 扩展实体数据导出到CAD设置CAD 别名到CoverageFeature Class To Coverage 要素类到CoverageTo dBASE 到dBASETable to dBASE [multiple] 表到dBASETo GeodatabaseFeature Class To Feature Class 要素类到要素类Feature Class to Geodatabase [multiple] 要素类到Geodatabase Import CAD Annotation 导入CAD 注记Import Coverage Annotation 导入Coverage 注记Import from CAD 从CAD 导入Raster To Geodatabase[multiple] Table to Geodatabase[multiple]栅格到Geodatabase 表到GeodatabaseTable To Table To Raster ASCII to Raster表到表到栅格ASCII 到栅格DEM to Raster Feature to Raster Float to RasterDEM 到栅格要素到栅格浮点到栅格Raster To Other Format 栅格到其他格式To Shapefile 到ShapefileFeature Class To Shapefile 要素类到Shapefile⑤Data Interoperability Tools 数据互转工具⑥ Data Management Tools 数据管理工具Database数据库Compact 紧凑Compress 压缩Disconnected Editing 分离编辑Check In 检入Check In From Delta 从增量中检入Check Out Export To Delta Domains检出导出增量值域Add Coded Value To Domain 添加编码值到值域Assign Domain To Field 赋值值域到字段Create Domain 创建值域Delete Coded Value From Domain 从值域中删除编码值Delete Domain Domain To Table 删除值域值域到表Remove Domain From Field 从字段删除值域Set Value For Range Domain 为范围值域设置值Table To Domain Feature class表到值域要素类Append Annotation Feature Classes 追加注记要素类Calculate Default Cluster Tolerance 计算缺省容限值Calculate Default Spatial Grid Index 计算缺省空间格网索引Integrate 整合Update Annotation Feature Class 更新标记要素类创建要素类Features创建要素类要素Add XY Coordinates Check Geometry Copy Features Delete Features添加XY 坐标检查几何形状复制要素删除要素Feature Envelope to Polygon 要素封装到多边形Feature To Line Feature To Point Feature To Polygon 要素到线要素到点要素到多边形Feature Vertices To Points 要素定点到点Multipart To Singlepart 多部份到单部份Polygon To Line Repair Geometry Split Line At Vertices 多边形到线修改集合形状在定点拆分线Fields Add Field 字段添加字段Assign Default To Field 设置缺省到字段Calculate Field Delete Field GeneralCopyDelete Rename Select Data追加Generalization计算字段删除字段普通复制删除重命名选择数据追加普通Aggregate Polygons 会萃多边形Collapse Dual Lines To Centerline 分解双线到中心线Dissolve Eliminate Smooth Line Simplify Building 融合消除平滑线简化建造物Simplify Line Or Polygon 简化线或者多边形Indexes 索引Add Attribute Index Add Spatial Index Remove Attribute Index Remove Spatial Index 添加属性索引添加空间索引删除属性索引删除空间索引Find Conflicts Drop Index Index Item查找冲突删除索引索引项Add Item Drop Item Joins添加项删除项连接Join Info Tables 连接Info 表Projections Define Projection Project Transform 投影定义投影投影变换Renumber Nodes 重新计数节点Update IDs Tolerances Tolerance Topology Build更新ID 容差容差拓扑构建Clean CleanCreate Labels 创建标注VPF Tile Topology VPF 图块拓扑Workspace Management 工作空间管理Create Coverage 创建CoverageJoinsAdd Join Remove Join 连接添加连接删除连接Layers and Table Views 图层和表的查看Make Query Table 制作查询表Make Raster Catalog Layer 制作栅格目录图层Make Raster Layer Make XY Event Layer Save To Layer File Select Layer By Attribute Select Layer By Location制作栅格图层制作XY 事件图层保存成图层文件通过属性选择通过位置选择制作表视图制作要素图层制作表视图制作要素图层Projections and Transformations 投影和转换Feature Batch Project 要素批量投影Project创建空间参考投影创建空间参考Raster Flip Mirror栅格翻转镜像Project Raster Rescale投影栅格重建比例Rotate Shift旋转偏移War 翘曲Define Projection 定义投影Raster 栅格Batch Build Pyramids 批量建立金字塔Batch Calculate Statistics 批量计算统计表Build Pyramids 建立金字塔Calculate Statistics 计算统计表Clip 剪切Composite Bands 组合波段Copy Raster 复制栅格Copy Raster Catalog Items 复制栅格目录项Create Raster Catalog 创建栅格目录Delete Raster Catalog Items 删除栅格目录项Mosaic To New Raster 镶嵌到新的栅格Resample创建栅格数据集重采样创建栅格数据集镶嵌镶嵌Relationship Classes 关系类Create Relationship Class 创建关系类Table To Relationship Class 表到关系类Subtypes 子类型Add Subtype 添加子类型Remove Subtype Set Default Subtype Set Subtype Field 删除子类型设置缺省子类型设置子类型字段Table 表Analyze 分析Change Privileges Copy Rows Delete RowsGet CountPivot Table改变权限复制行删除行获得数目关联表创建表Topology创建表拓扑Add Feature Class To Topology 添加要素类型到拓扑Add Rule To Topology 添加规则到拓扑Create Topology 创建拓扑Remove Feature Class From Topology 从拓扑删除要素类Remove Rule From Topology 从拓扑中删除规则Set Cluster Tolerance Validate Topology Versions 版本设置簇容限值教验拓扑Alter Version Create Version Delete Version Post Version Reconcile Version 改变版本创建版本删除版本提交版本协调版本Register As Versioned 注册版本Unregister As Versioned 取销注册Workspace 工作空间Create ArcInfo Workspace Create Feature Dataset Create FolderCreate Personal GDB创建ArcInfo 工作空间创建要素数据集创建文件夹创建个人GeodatabaseGeocoding Tools 地理编码工具Automate Geocoding Indexes 自动生成地理编码索引Create Address Locator 创建地址定位器Deautomate Geocoding Indexes 取销自动生成地理编码索引Delete Address Locator Geocode Addresses Rebuild Geocoding Indexes删除地址定位器地理编码地址重建地理编码索引Standardize Addresses 标准化地址⑦ Geocoding Tools 地理编码工具⑧ Geostatistical Analyst Tools 地理统计分析工具Geostatistical Layer To Grid 导出地理统计图层到Grid⑨ Linear Referencing Tools 线性参考工具Calibrate Routes Create Routes校准路径创建路径Dissolve Route Events 融合路径事件Locate Features Along Routes 沿路径定位要素Make Route Event Layer 制作路径事件图层Overlay Route Events Transform Route Events 叠加路径事件转换路径事件⑩ Spatial Analyst Tools 空间分析工具Conditional 拾取条件设空Density核密度点密度线密度Distance代价分配代价回联代价距离代价路径欧几里德分配欧几里德方向欧几里德距离走廊路径距离路径距离分配路径距离回联Extraction提取值到点根据属性提取用圆提取用多边形提取用掩模提取用点提取条件密度距离提取采样Generalization 区块组合多数过滤收缩消蚀细化聚合膨胀边界清理Groundwater 粒子跟踪达西流达西速率透水层Hydrology下陷点填充捕捉汇流点河流分级河流到要素河留连接流向流域流程盆地积累流量Interpolation 克里金地形到栅格曲线拟合普通地下水水文添补用文件地形到栅格自然邻域趋势距离权重倒数Local 本地像素统计分级合成大于频率小于频率普及度最低位置等于频率Map Algebra 地图代数单输出地图代数多输出地图代数Math Bitwise 数学计算为运算位与位右移位否位异或者左位移按位或者Logical 逻辑运算不等于为空大于大于等于小于小于等于测试等于组合与组合异或者组合或者逻辑与逻辑否逻辑异或者逻辑或者Trigonometric 三角函数ATan2余弦双曲余弦双曲正切双曲正弦反余弦反双曲余弦反双曲正切反双曲正弦反正切反正弦正切正弦10 的对数10 的指数2 的对数2 的指数上取整下取整乘减加取整否平方平方根指数整除浮点绝对值自然对数自然指数除MultivariateIsocluster主成份创建特征多元多变量最大似然性分类波段组统计类概率系统树图功能编辑署名函数Neighborhood 块统计点统计焦点流焦点统计线统计过滤Overlay加权叠加邻域叠加Raster Creation创建常量栅格创建正态栅格栅格创建创建随机栅格Reclass切片查找重分类用ASCII 文件重分类用表重分类重分类Surface 表面坡向坡度填/挖山影曲率等高线等高线列表观察点视阈Zonal 区域区域几何区域几何到表区域填充区域统计区域统计到表面积制表○11 Spatial Statistics Tools 空间统计工具Analyzing Patterns 分析模型Average Nearest Neighbor 平均邻近邻居High/Low Clustering[Getis-Ord General G]高/低聚类Spatial Autocorrelation [Morans I] 空间自相关Mapping Clusters 绘制群体Cluster and Outlier Analysis 群体和群外要素分析Cluster/Outlier Analysis with Rendering 带渲染群体和群外要素分析Hot Spot Analysis [Getis-Ord Gi*] 热点分析Hot Spot Analysis with Rendering 带渲染热点分析Measuring Geographic Distributions 测量地理分布Central Feature Directional Distribution Linear Directional Mean Mean Center Standard Distance中心要素定向分布平均线方向平均中心标准间隔距离Utilities 实用工具Calculate Areas Collect Events计算面积采集事件Collect Events with Rendering 带渲染采集事件Count Rendering 计算渲染Export Feature Attribute to Ascii 导出要素表到Ascii 文本Z Score RenderineCoverage Tool: Coverage 覆盖、覆盖范围工具Point Distance Point Node Thiessen Conversion From Coverage Export To DLG点距离点到结点泰森近似多边形转换从Coverage到DLGExport To Interchange File 到Interchange 文件Export To S57 Export To SETS Export To VPF UngenerateTo Coverage到S57到SETS到VPF取销生成到CoverageAdvanced Tiger Conversion 高级Tiger 转换Basic Tiger Conversion 基本Tiger 转换Generate 生成Import From DLG 从DLG 导入Import From Interchange File 从Interchange 文件导入Import From S57 Import From SETS Imort From VPF Data Management从S57 导入从SETS 导入从VPF 导入数据管理Aggregate Append 集合追加Composite Features 要素合成Line Coverage To Region 线Coverage 到区域Line Coverage To Route 线Coverage 到路径Polygon Coverage To Region 多边形Coverage 到区域Region To Polygon Coverage 区域到多边形Coverage。
基于DIVA-GIS生物地理分布图的绘制

基于DIVA-GIS生物地理分布图的绘制作者:谢春平来源:《湖北农业科学》2011年第11期摘要:简单快速地绘出准确的生物地理分布图,是生物地理学研究的第一步。
对DIVA-GIS软件的功能及界面进行了简要的介绍,并通过逐步演绎的方法,详细地介绍了利用DIVA-GIS软件进行绘制生物地理分布图的方法和步骤。
最后,对DIVA-GIS软件的特点及应用前景进行了简要的评述。
关键词:DIVA-GIS;生物地理分布图;实例中图分类号:TP319文献标识码:A文章编号:0439-8114(2011)11-2345-04 Simple Biogeography Distribution Picture Draw based on DIVA-GISXIEChun-ping(InvestigationDepartmentofNanjingForestPoliceCollege,Nanjing210046,China)Abstract:Itisveryimportantforresearchertodrawaprecisebiogeographydistributionsimplyandfastonthebiogeographystudy.TheviewandfunctionofsoftwareofDIVA-GISwerebrieflyintroduced.Howtodrawabiogeographydistributionwasshowedstepbystep.Finally,thecharacteristicsandapplicationprospectofDIVA-GISwascommentedbriefly.Keywords:DIVA-GIS; biogeographydistribution;example物种分布区是在地球表面所占据的地理区域,在地图上表现为沿分布区边界的一条或几条封闭曲线或者散布于一定地理范围的点集,而分布区图成为生物地理学家和分类学家表达思想最经常使用的“语言”,被用来推测分类群的起源、散布、分化等规律[1]。
DIVA-GIS使用手册

3.
3.1 3.2 3.3 3.4 3.5 3.6 3.7 3.8 3.9 3.10 3.11 3.12 3.13 3.14 3.15
THE DATA MENU ...................................................... 13
Abstract
DIVA-GIS is a free computer program for mapping and analyzing spatial data. It is particularly useful for analyzing the distribution of organisms to elucidate geographic and ecological patterns. It is aimed at those who cannot afford generic commercial geographic information system (GIS) software, or do not have the time to learn how to use these often complicated programs, and for anyone else who wants a GIS tailormade to analyze biological distributions. DIVA-GIS supports vector (point, line, polygon), image and grid data types. It can help improve data quality by finding the coordinates of localities using gazetteers, and by checking existing coordinates using overlays (spatial queries) of the collection sites with administrative boundary databases. Distribution maps can then be made. Analytical functions in DIVA-GIS include mapping of richness and diversity (including based on molecular marker (DNA) data; mapping the distribution of specific traits; identifying areas with complementary diversity; and calculating spatial autocorrelation. DIVA-GIS can also extract climate data for all locations on land. Ecological niche modeling can be carried out using the BIOCLIM and DOMAIN algorithms.
Diva 验证工具使用说明
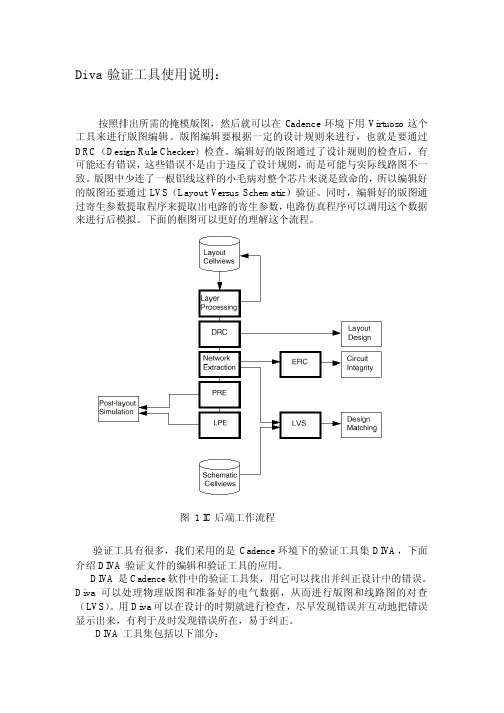
Diva 验证工具使用说明:按照排出所需的掩模版图,然后就可以在 Cadence 环境下用 Virtuoso 这个 工具来进行版图编辑。
版图编辑要根据一定的设计规则来进行,也就是要通过 DRC(Design Rule Checker)检查。
编辑好的版图通过了设计规则的检查后,有 可能还有错误,这些错误不是由于违反了设计规则,而是可能与实际线路图不一 致。
版图中少连了一根铝线这样的小毛病对整个芯片来说是致命的,所以编辑好 的版图还要通过 LVS(Layout Versus Schematic)验证。
同时,编辑好的版图通 过寄生参数提取程序来提取出电路的寄生参数, 电路仿真程序可以调用这个数据 来进行后模拟。
下面的框图可以更好的理解这个流程。
图 1 IC 后端工作流程 验证工具有很多,我们采用的是 Cadence 环境下的验证工具集 DIVA,下面 介绍 DIVA 验证文件的编辑和验证工具的应用。
DIVA 是 Cadence 软件中的验证工具集,用它可以找出并纠正设计中的错误。
Diva 可以处理物理版图和准备好的电气数据,从而进行版图和线路图的对查 (LVS) 。
用 Diva 可以在设计的时期就进行检查,尽早发现错误并互动地把错误 显示出来,有利于及时发现错误所在,易于纠正。
DIVA 工具集包括以下部分:1.设计规则检查(iDRC) 2.版图寄生参数提取(iLPE) 3.寄生电阻提取(iPRE) 4.电气规则检查(iERC) 5.版图与线路图比较程序(iLVS) Diva 的各个组件之间是互相联系的, 有时候一个组件的执行要依赖另一个组 件先执行。
例如:要执行 LVS 就先要执行 DRC 等。
在 Cadence 系统中,Diva 集成在版图编辑程序 Virtuoso 和线路图编辑程序 Composer 中,在这两各环境中 都可以激活 Diva。
要运行 Diva 前,还要准备好规则验证的文件。
可以把这个文 件放在任何目录下,这些规则文件的写法下面专门会进行说明,也会给出例子。
Indradrive 系列 故障代码

Error MessagesF9001 Error internal function call.F9002 Error internal RTOS function callF9003 WatchdogF9004 Hardware trapF8000 Fatal hardware errorF8010 Autom. commutation: Max. motion range when moving back F8011 Commutation offset could not be determinedF8012 Autom. commutation: Max. motion rangeF8013 Automatic commutation: Current too lowF8014 Automatic commutation: OvercurrentF8015 Automatic commutation: TimeoutF8016 Automatic commutation: Iteration without resultF8017 Automatic commutation: Incorrect commutation adjustment F8018 Device overtemperature shutdownF8022 Enc. 1: Enc. signals incorr. (can be cleared in ph. 2) F8023 Error mechanical link of encoder or motor connectionF8025 Overvoltage in power sectionF8027 Safe torque off while drive enabledF8028 Overcurrent in power sectionF8030 Safe stop 1 while drive enabledF8042 Encoder 2 error: Signal amplitude incorrectF8057 Device overload shutdownF8060 Overcurrent in power sectionF8064 Interruption of motor phaseF8067 Synchronization PWM-Timer wrongF8069 +/-15Volt DC errorF8070 +24Volt DC errorF8076 Error in error angle loopF8078 Speed loop error.F8079 Velocity limit value exceededF8091 Power section defectiveF8100 Error when initializing the parameter handlingF8102 Error when initializing power sectionF8118 Invalid power section/firmware combinationF8120 Invalid control section/firmware combinationF8122 Control section defectiveF8129 Incorrect optional module firmwareF8130 Firmware of option 2 of safety technology defectiveF8133 Error when checking interrupting circuitsF8134 SBS: Fatal errorF8135 SMD: Velocity exceededF8140 Fatal CCD error.F8201 Safety command for basic initialization incorrectF8203 Safety technology configuration parameter invalidF8813 Connection error mains chokeF8830 Power section errorF8838 Overcurrent external braking resistorF7010 Safely-limited increment exceededF7011 Safely-monitored position, exceeded in pos. DirectionF7012 Safely-monitored position, exceeded in neg. DirectionF7013 Safely-limited speed exceededF7020 Safe maximum speed exceededF7021 Safely-limited position exceededF7030 Position window Safe stop 2 exceededF7031 Incorrect direction of motionF7040 Validation error parameterized - effective thresholdF7041 Actual position value validation errorF7042 Validation error of safe operation modeF7043 Error of output stage interlockF7050 Time for stopping process exceeded8.3.15 F7051 Safely-monitored deceleration exceeded (159)8.4 Travel Range Errors (F6xxx) (161)8.4.1 Behavior in the Case of Travel Range Errors (161)8.4.2 F6010 PLC Runtime Error (162)8.4.3 F6024 Maximum braking time exceeded (163)8.4.4 F6028 Position limit value exceeded (overflow) (164)8.4.5 F6029 Positive position limit exceeded (164)8.4.6 F6030 Negative position limit exceeded (165)8.4.7 F6034 Emergency-Stop (166)8.4.8 F6042 Both travel range limit switches activated (167)8.4.9 F6043 Positive travel range limit switch activated (167)8.4.10 F6044 Negative travel range limit switch activated (168)8.4.11 F6140 CCD slave error (emergency halt) (169)8.5 Interface Errors (F4xxx) (169)8.5.1 Behavior in the Case of Interface Errors (169)8.5.2 F4001 Sync telegram failure (170)8.5.3 F4002 RTD telegram failure (171)8.5.4 F4003 Invalid communication phase shutdown (172)8.5.5 F4004 Error during phase progression (172)8.5.6 F4005 Error during phase regression (173)8.5.7 F4006 Phase switching without ready signal (173)8.5.8 F4009 Bus failure (173)8.5.9 F4012 Incorrect I/O length (175)8.5.10 F4016 PLC double real-time channel failure (176)8.5.11 F4017 S-III: Incorrect sequence during phase switch (176)8.5.12 F4034 Emergency-Stop (177)8.5.13 F4140 CCD communication error (178)8.6 Non-Fatal Safety Technology Errors (F3xxx) (178)8.6.1 Behavior in the Case of Non-Fatal Safety Technology Errors (178)8.6.2 F3111 Refer. missing when selecting safety related end pos (179)8.6.3 F3112 Safe reference missing (179)8.6.4 F3115 Brake check time interval exceeded (181)Troubleshooting Guide | Rexroth IndraDrive Electric Drivesand ControlsI Bosch Rexroth AG VII/XXIITable of ContentsPage8.6.5 F3116 Nominal load torque of holding system exceeded (182)8.6.6 F3117 Actual position values validation error (182)8.6.7 F3122 SBS: System error (183)8.6.8 F3123 SBS: Brake check missing (184)8.6.9 F3130 Error when checking input signals (185)8.6.10 F3131 Error when checking acknowledgment signal (185)8.6.11 F3132 Error when checking diagnostic output signal (186)8.6.12 F3133 Error when checking interrupting circuits (187)8.6.13 F3134 Dynamization time interval incorrect (188)8.6.14 F3135 Dynamization pulse width incorrect (189)8.6.15 F3140 Safety parameters validation error (192)8.6.16 F3141 Selection validation error (192)8.6.17 F3142 Activation time of enabling control exceeded (193)8.6.18 F3143 Safety command for clearing errors incorrect (194)8.6.19 F3144 Incorrect safety configuration (195)8.6.20 F3145 Error when unlocking the safety door (196)8.6.21 F3146 System error channel 2 (197)8.6.22 F3147 System error channel 1 (198)8.6.23 F3150 Safety command for system start incorrect (199)8.6.24 F3151 Safety command for system halt incorrect (200)8.6.25 F3152 Incorrect backup of safety technology data (201)8.6.26 F3160 Communication error of safe communication (202)8.7 Non-Fatal Errors (F2xxx) (202)8.7.1 Behavior in the Case of Non-Fatal Errors (202)8.7.2 F2002 Encoder assignment not allowed for synchronization (203)8.7.3 F2003 Motion step skipped (203)8.7.4 F2004 Error in MotionProfile (204)8.7.5 F2005 Cam table invalid (205)8.7.6 F2006 MMC was removed (206)8.7.7 F2007 Switching to non-initialized operation mode (206)8.7.8 F2008 RL The motor type has changed (207)8.7.9 F2009 PL Load parameter default values (208)8.7.10 F2010 Error when initializing digital I/O (-> S-0-0423) (209)8.7.11 F2011 PLC - Error no. 1 (210)8.7.12 F2012 PLC - Error no. 2 (210)8.7.13 F2013 PLC - Error no. 3 (211)8.7.14 F2014 PLC - Error no. 4 (211)8.7.15 F2018 Device overtemperature shutdown (211)8.7.16 F2019 Motor overtemperature shutdown (212)8.7.17 F2021 Motor temperature monitor defective (213)8.7.18 F2022 Device temperature monitor defective (214)8.7.19 F2025 Drive not ready for control (214)8.7.20 F2026 Undervoltage in power section (215)8.7.21 F2027 Excessive oscillation in DC bus (216)8.7.22 F2028 Excessive deviation (216)8.7.23 F2031 Encoder 1 error: Signal amplitude incorrect (217)VIII/XXII Bosch Rexroth AG | Electric Drivesand ControlsRexroth IndraDrive | Troubleshooting GuideTable of ContentsPage8.7.24 F2032 Validation error during commutation fine adjustment (217)8.7.25 F2033 External power supply X10 error (218)8.7.26 F2036 Excessive position feedback difference (219)8.7.27 F2037 Excessive position command difference (220)8.7.28 F2039 Maximum acceleration exceeded (220)8.7.29 F2040 Device overtemperature 2 shutdown (221)8.7.30 F2042 Encoder 2: Encoder signals incorrect (222)8.7.31 F2043 Measuring encoder: Encoder signals incorrect (222)8.7.32 F2044 External power supply X15 error (223)8.7.33 F2048 Low battery voltage (224)8.7.34 F2050 Overflow of target position preset memory (225)8.7.35 F2051 No sequential block in target position preset memory (225)8.7.36 F2053 Incr. encoder emulator: Pulse frequency too high (226)8.7.37 F2054 Incr. encoder emulator: Hardware error (226)8.7.38 F2055 External power supply dig. I/O error (227)8.7.39 F2057 Target position out of travel range (227)8.7.40 F2058 Internal overflow by positioning input (228)8.7.41 F2059 Incorrect command value direction when positioning (229)8.7.42 F2063 Internal overflow master axis generator (230)8.7.43 F2064 Incorrect cmd value direction master axis generator (230)8.7.44 F2067 Synchronization to master communication incorrect (231)8.7.45 F2068 Brake error (231)8.7.46 F2069 Error when releasing the motor holding brake (232)8.7.47 F2074 Actual pos. value 1 outside absolute encoder window (232)8.7.48 F2075 Actual pos. value 2 outside absolute encoder window (233)8.7.49 F2076 Actual pos. value 3 outside absolute encoder window (234)8.7.50 F2077 Current measurement trim wrong (235)8.7.51 F2086 Error supply module (236)8.7.52 F2087 Module group communication error (236)8.7.53 F2100 Incorrect access to command value memory (237)8.7.54 F2101 It was impossible to address MMC (237)8.7.55 F2102 It was impossible to address I2C memory (238)8.7.56 F2103 It was impossible to address EnDat memory (238)8.7.57 F2104 Commutation offset invalid (239)8.7.58 F2105 It was impossible to address Hiperface memory (239)8.7.59 F2110 Error in non-cyclical data communic. of power section (240)8.7.60 F2120 MMC: Defective or missing, replace (240)8.7.61 F2121 MMC: Incorrect data or file, create correctly (241)8.7.62 F2122 MMC: Incorrect IBF file, correct it (241)8.7.63 F2123 Retain data backup impossible (242)8.7.64 F2124 MMC: Saving too slowly, replace (243)8.7.65 F2130 Error comfort control panel (243)8.7.66 F2140 CCD slave error (243)8.7.67 F2150 MLD motion function block error (244)8.7.68 F2174 Loss of motor encoder reference (244)8.7.69 F2175 Loss of optional encoder reference (245)Troubleshooting Guide | Rexroth IndraDrive Electric Drivesand Controls| Bosch Rexroth AG IX/XXIITable of ContentsPage8.7.70 F2176 Loss of measuring encoder reference (246)8.7.71 F2177 Modulo limitation error of motor encoder (246)8.7.72 F2178 Modulo limitation error of optional encoder (247)8.7.73 F2179 Modulo limitation error of measuring encoder (247)8.7.74 F2190 Incorrect Ethernet configuration (248)8.7.75 F2260 Command current limit shutoff (249)8.7.76 F2270 Analog input 1 or 2, wire break (249)8.7.77 F2802 PLL is not synchronized (250)8.7.78 F2814 Undervoltage in mains (250)8.7.79 F2815 Overvoltage in mains (251)8.7.80 F2816 Softstart fault power supply unit (251)8.7.81 F2817 Overvoltage in power section (251)8.7.82 F2818 Phase failure (252)8.7.83 F2819 Mains failure (253)8.7.84 F2820 Braking resistor overload (253)8.7.85 F2821 Error in control of braking resistor (254)8.7.86 F2825 Switch-on threshold braking resistor too low (255)8.7.87 F2833 Ground fault in motor line (255)8.7.88 F2834 Contactor control error (256)8.7.89 F2835 Mains contactor wiring error (256)8.7.90 F2836 DC bus balancing monitor error (257)8.7.91 F2837 Contactor monitoring error (257)8.7.92 F2840 Error supply shutdown (257)8.7.93 F2860 Overcurrent in mains-side power section (258)8.7.94 F2890 Invalid device code (259)8.7.95 F2891 Incorrect interrupt timing (259)8.7.96 F2892 Hardware variant not supported (259)8.8 SERCOS Error Codes / Error Messages of Serial Communication (259)9 Warnings (Exxxx) (263)9.1 Fatal Warnings (E8xxx) (263)9.1.1 Behavior in the Case of Fatal Warnings (263)9.1.2 E8025 Overvoltage in power section (263)9.1.3 E8026 Undervoltage in power section (264)9.1.4 E8027 Safe torque off while drive enabled (265)9.1.5 E8028 Overcurrent in power section (265)9.1.6 E8029 Positive position limit exceeded (266)9.1.7 E8030 Negative position limit exceeded (267)9.1.8 E8034 Emergency-Stop (268)9.1.9 E8040 Torque/force actual value limit active (268)9.1.10 E8041 Current limit active (269)9.1.11 E8042 Both travel range limit switches activated (269)9.1.12 E8043 Positive travel range limit switch activated (270)9.1.13 E8044 Negative travel range limit switch activated (271)9.1.14 E8055 Motor overload, current limit active (271)9.1.15 E8057 Device overload, current limit active (272)X/XXII Bosch Rexroth AG | Electric Drivesand ControlsRexroth IndraDrive | Troubleshooting GuideTable of ContentsPage9.1.16 E8058 Drive system not ready for operation (273)9.1.17 E8260 Torque/force command value limit active (273)9.1.18 E8802 PLL is not synchronized (274)9.1.19 E8814 Undervoltage in mains (275)9.1.20 E8815 Overvoltage in mains (275)9.1.21 E8818 Phase failure (276)9.1.22 E8819 Mains failure (276)9.2 Warnings of Category E4xxx (277)9.2.1 E4001 Double MST failure shutdown (277)9.2.2 E4002 Double MDT failure shutdown (278)9.2.3 E4005 No command value input via master communication (279)9.2.4 E4007 SERCOS III: Consumer connection failed (280)9.2.5 E4008 Invalid addressing command value data container A (280)9.2.6 E4009 Invalid addressing actual value data container A (281)9.2.7 E4010 Slave not scanned or address 0 (281)9.2.8 E4012 Maximum number of CCD slaves exceeded (282)9.2.9 E4013 Incorrect CCD addressing (282)9.2.10 E4014 Incorrect phase switch of CCD slaves (283)9.3 Possible Warnings When Operating Safety Technology (E3xxx) (283)9.3.1 Behavior in Case a Safety Technology Warning Occurs (283)9.3.2 E3100 Error when checking input signals (284)9.3.3 E3101 Error when checking acknowledgment signal (284)9.3.4 E3102 Actual position values validation error (285)9.3.5 E3103 Dynamization failed (285)9.3.6 E3104 Safety parameters validation error (286)9.3.7 E3105 Validation error of safe operation mode (286)9.3.8 E3106 System error safety technology (287)9.3.9 E3107 Safe reference missing (287)9.3.10 E3108 Safely-monitored deceleration exceeded (288)9.3.11 E3110 Time interval of forced dynamization exceeded (289)9.3.12 E3115 Prewarning, end of brake check time interval (289)9.3.13 E3116 Nominal load torque of holding system reached (290)9.4 Non-Fatal Warnings (E2xxx) (290)9.4.1 Behavior in Case a Non-Fatal Warning Occurs (290)9.4.2 E2010 Position control with encoder 2 not possible (291)9.4.3 E2011 PLC - Warning no. 1 (291)9.4.4 E2012 PLC - Warning no. 2 (291)9.4.5 E2013 PLC - Warning no. 3 (292)9.4.6 E2014 PLC - Warning no. 4 (292)9.4.7 E2021 Motor temperature outside of measuring range (292)9.4.8 E2026 Undervoltage in power section (293)9.4.9 E2040 Device overtemperature 2 prewarning (294)9.4.10 E2047 Interpolation velocity = 0 (294)9.4.11 E2048 Interpolation acceleration = 0 (295)9.4.12 E2049 Positioning velocity >= limit value (296)9.4.13 E2050 Device overtemp. Prewarning (297)Troubleshooting Guide | Rexroth IndraDrive Electric Drivesand Controls| Bosch Rexroth AG XI/XXIITable of ContentsPage9.4.14 E2051 Motor overtemp. prewarning (298)9.4.15 E2053 Target position out of travel range (298)9.4.16 E2054 Not homed (300)9.4.17 E2055 Feedrate override S-0-0108 = 0 (300)9.4.18 E2056 Torque limit = 0 (301)9.4.19 E2058 Selected positioning block has not been programmed (302)9.4.20 E2059 Velocity command value limit active (302)9.4.21 E2061 Device overload prewarning (303)9.4.22 E2063 Velocity command value > limit value (304)9.4.23 E2064 Target position out of num. range (304)9.4.24 E2069 Holding brake torque too low (305)9.4.25 E2070 Acceleration limit active (306)9.4.26 E2074 Encoder 1: Encoder signals disturbed (306)9.4.27 E2075 Encoder 2: Encoder signals disturbed (307)9.4.28 E2076 Measuring encoder: Encoder signals disturbed (308)9.4.29 E2077 Absolute encoder monitoring, motor encoder (encoder alarm) (308)9.4.30 E2078 Absolute encoder monitoring, opt. encoder (encoder alarm) (309)9.4.31 E2079 Absolute enc. monitoring, measuring encoder (encoder alarm) (309)9.4.32 E2086 Prewarning supply module overload (310)9.4.33 E2092 Internal synchronization defective (310)9.4.34 E2100 Positioning velocity of master axis generator too high (311)9.4.35 E2101 Acceleration of master axis generator is zero (312)9.4.36 E2140 CCD error at node (312)9.4.37 E2270 Analog input 1 or 2, wire break (312)9.4.38 E2802 HW control of braking resistor (313)9.4.39 E2810 Drive system not ready for operation (314)9.4.40 E2814 Undervoltage in mains (314)9.4.41 E2816 Undervoltage in power section (314)9.4.42 E2818 Phase failure (315)9.4.43 E2819 Mains failure (315)9.4.44 E2820 Braking resistor overload prewarning (316)9.4.45 E2829 Not ready for power on (316)。
《城市轨道交通供电系统工程施工质量验收规范》标准全文

量安全监督总站负责技术内容的解释。执行过程中,请各有关单位结合实际,不断总结经验,
并将发现的问题、意见和建议函告杭州市建设工程质量安全监督总站[地址:莫干山路 100 号耀江国际大厦 A 座 12 楼,邮政编码:311005],以供修订时参考。
本规范主编单位、参编单位、主要起草人和主要审查人: 本规范主编单位:杭州市建设工程质量安全监督总站
本规范共分 10 章,主要技术内容包括:1 总则;2 术语;3 基本规定;4 牵引及降压变 电所;5 刚性架空接触网;6 柔性架空接触网;7 接触轨;8 杂散电流腐蚀防护系统;9 可视 化接地系统;10 电力监控与电能质量管理系统。
本规范由浙江省住房和城乡建设厅负责管理和对强制条文的解释,由杭州市建设工程质
浙江省工程建设标准
城市轨道交通供电系统施工质量验收规范
Code for acceptance of construction quality of power supply system engineering of urban rail transit
DB33/T ××/××××-201×
主编单位:杭州市建设工程质量安全监督总站 中铁电气化局集团有限公司 中铁二局集团有限公司
中铁电气化局集团有限公司 中铁二局集团有限公司 本规范参编单位:中国电建集团华东勘测设计研究院有限公司 杭州市地铁集团有限责任公司 宁波市轨道交通集团有限公司 中铁十一局集团电务工程有限公司 中铁一局集团电务工程有限公司 浙江丽水宏瑜建设有限公司 浙江德光建筑工程有限公司 浙江瓯立园林建设有限公司 纳琦绿能工程有限公司 浙江鸿旭园林建设有限公司 浙江罗邦建设有限公司 丽水市金丰建筑工程有限公司 丽水市鼎旺建设工程有限公司 浙江瓯业园林建设有限公司 丽水市汇桦市政园林有限公司 浙江屹立建设有限公司 浙江华歌建设有限公司 本规范主要起草人:史文杰 周静增 肖国军 雷 鸣 蔡佳旻 周 军 施云琼 王祥涛 于镇川 郭润桥 唐兆军 孙海东 王海涛 左传文 郭 忠 叶波涛 徐 俊 吴赟胤 王存建 王 波 朱智文 赵加建 范 卿 韩明学 陈俊卿 周洪波 何贵龙 黄美香 潘国平 蒋 真 本规范主要审查人:石西全 赵宇宏 戴新国 游劲秋 张 燕 袁 林 刘 伟 洪秀敏
arcgis file database shape解析 -回复
arcgis file database shape解析-回复ArcGIS File Database Shape解析ArcGIS是一套专业的地理信息系统(GIS)软件,被广泛应用于环境科学、城市规划、土地利用、交通规划等领域。
ArcGIS提供了多种文件格式来存储和管理空间数据,其中最常用的格式之一就是Shapefile(SHP)。
Shapefile是一种空间矢量数据格式,由一组文件组成,包括.shp、.shx、.dbf和.prj等。
每个文件都有不同的作用,一起构成了完整的Shapefile。
首先是.shp文件,它是Shapefile的核心文件,包含了空间几何形状的信息,比如点、线、多边形等。
.shp文件使用二进制格式存储,可以包含单个图层或多个图层的几何形状。
其次是.shx文件,它是Shapefile的索引文件,用于快速查找和定位.shp 文件中的几何形状。
.shx文件由一系列的索引记录构成,每个记录包含了几何形状的起始位置和长度等关键信息。
接下来是.dbf文件,它是Shapefile的属性数据文件,用于存储与几何形状相关联的属性信息。
.dbf文件可以用表格的形式显示,每一行代表一个几何形状的属性数据,每一列代表一个属性字段,比如名称、面积、人口等。
最后是.prj文件,它是Shapefile的投影文件,用于定义几何形状的坐标系和投影参数。
.prj文件通常是一个文本文件,里面包含了地理坐标系或投影坐标系的详细描述,以确保空间数据在不同的GIS软件中能正确显示和处理。
在ArcGIS中,解析Shapefile可以通过ArcPy模块来实现。
ArcPy是ArcGIS的Python库,提供了丰富的地理处理函数和对象来进行空间数据的操作和分析。
首先,我们需要导入ArcPy模块和打开Shapefile文件:import arcpyshapefile = 'path_to_shapefile.shp'#打开Shapefileshapefile_obj = yer(shapefile)然后,我们可以获取Shapefile的属性信息和几何形状信息:#获取属性信息fields = arcpy.ListFields(shapefile)for field in fields:print()#获取几何形状信息for feature in arcpy.da.SearchCursor(shapefile, ["SHAPE@"]): geometry = feature[0]print(geometry)通过上述代码,我们可以获取Shapefile的所有属性字段的名称,并通过循环打印出来。
NVIDIA GRID 许可说明书

User GuideTABLE OF CONTENTS Chapter 1. Introduction to NVIDIA GRID Licensing (1)1.1. How GRID licensing works (1)1.2. NVIDIA GRID license editions (2)1.3. How this guide is organized (2)Chapter 2. Licensing GRID Virtual GPU (3)2.1. vGPU license requirements (3)2.2. Licensing GRID vGPU on Windows (5)2.3. Licensing GRID vGPU on Linux (6)Chapter 3. Licensing GRID Virtual Workstation with passthrough (9)3.1. GRID Virtual Workstation features (9)3.2. Licensing GRID Virtual Workstation on Windows (9)3.3. Disabling GRID Virtual Workstation on Windows (11)3.4. Licensing GRID Virtual Workstation on Linux (12)Chapter 4. Advanced topics (14)4.1. Licenses obtained after boot (14)4.2. Operating with intermittent connectivity to the license server (14)4.3. Applying Windows license settings via registry (14)Chapter 5. Troubleshooting (17)5.1. Known issues (17)5.2. Troubleshooting steps (17)Figure 1 GRID licensing architecture (1)Figure 2 Managing vGPU licensing in NVIDIA Control Panel (6)Figure 3 Managing Virtual Workstation Licensing in NVIDIA Control Panel (10)Figure 4 Applying a GRID Virtual Workstation license (11)Figure 5 Disabling GRID Virtual Workstation (12)Figure 6 Configuring vGPU licensing via registry settings (16)T able 1 GRID license editions (2)T able 2 Virtual GPUs licensed on T esla M60 (3)T able 3 Virtual GPUs licensed on T esla M10 (4)T able 4 Virtual GPUs licensed on T esla M6 (4)T able 5 Licensing registry settings (15)The following NVIDIA GRID™ products are available as licensed products on NVIDIA Tesla™ GPUs:‣Virtual Workstation‣Virtual PC‣Virtual ApplicationsThis guide describes these licensed products and how to enable and use them on supported hardware.1.1. How GRID licensing worksFigure 1 provides an overview of GRID licensing:Figure 1 GRID licensing architectureIntroduction to NVIDIA GRID LicensingWhen enabled on Tesla GPUs, licensed editions of GRID Virtual Workstation or Virtual PC are activated by obtaining a license over the network from an NVIDIA GRID License Server. The license is “checked out” or “borrowed” at the time the Virtual Machine (VM) is booted, and returned when the VM is shut down.Information on setting up and running the GRID License Server is provided in GRIDLicense Server User Guide.1.2. NVIDIA GRID license editionsGRID licenses come in three editions that enable different classes of GRID features. The GRID software automatically selects the right license edition based on the features being used:T able 1 GRID license editions1.3. How this guide is organizedThe remainder of this guide is organized as follows:‣Licensing GRID Virtual GPU describes licensing of GRID Virtual GPU.‣Licensing GRID Virtual Workstation with passthrough describes licensing of GRID Virtual Workstation features with GPU passthrough.‣Advanced topics discusses advanced licensing settings.‣Troubleshooting provides guidance on troubleshooting.This chapter describes licensing of NVIDIA GRID vGPU.2.1. vGPU license requirementsNVIDIA GRID Virtual GPU (vGPU) is offered as a licensable feature on Tesla M6, Tesla M10, and Tesla M60 GPUs. If licensing is configured, the Virtual Machine (VM) obtains a license from the license server when a vGPU is booted on these GPUs. The VM retainsthe license until it is shut down; it then releases the license back to the license server.vGPUs that require licensing run at full capability even without a license. However , on Windows, until a license is acquired, users are warned each time a vGPU fails to get a license. These warnings cease after a license is acquired.NVIDIA GRID K1 and K2 GPUs do not require a license to run vGPU.Table 2, Table 3, and Table 4 list the vGPU types that are supported on Tesla M60, Tesla M10, and Tesla M6, and the license edition that each vGPU type requires.T able 2 Virtual GPUs licensed on T esla M601This virtual GPU supports only 1 virtual display head on a Windows 10 guest OS.T able 3 Virtual GPUs licensed on T esla M10T able 4 Virtual GPUs licensed on T esla M62Virtualized applications are rendered in an off-screen buffer. Therefore, the maximum resolution is independent of the maximum resolution of the display head.The higher-end GRID license editions are inclusive of lower editions: for examplevirtual GPUs that require a GRID Virtual PC license are also usable with a GRID Virtual Workstation license.For more information on the virtual GPU types listed in T able 2 and T able 4, consult GRID Virtual GPU User Guide .2.2. Licensing GRID vGPU on WindowsTo license GRID vGPU on Windows, follow these steps:1.Open NVIDIA Control Panel :‣Right-click on the Windows desktop and select NVIDIA Control Panel from the menu.‣Open Windows Control Panel and double-click the NVIDIA Control Panel icon. 2.In NVIDIA Control Panel , select the Manage License task in the Licensing sectionof the navigation pane, as shown in Figure 2.If the Licensing section and Manage License task are not displayed in NVIDIA Control Panel , the vGPU you are running on does not require a license, or the system has been configured to hide licensing controls in NVIDIA Control Panel (see Applying Windows license settings via registry on registry settings).The Manage License task pane shows that GRID vGPU is currently unlicensed.Figure 2 Managing vGPU licensing in NVIDIA Control Panel3.Enter the address of your local GRID License Server in the License Server field.The address can be a fully-qualified domain name such as, or an IP address such as 10.31.20.45.4.Leave the Port Number field unset.It will default to 7070, which is the default port number used by NVIDIA GRID License Server.5.Click Apply to assign the settings.The system will request the appropriate license for the current vGPU fromthe configured license server. If the system fails to obtain a license, refer toTroubleshooting for guidance on troubleshooting.Once configured in NVIDIA Control Panel, licensing settings persist across reboots. 2.3. Licensing GRID vGPU on LinuxTo license GRID vGPU on Linux:1.As root, open the file /etc/nvidia/gridd.conf in a plain-text editor, such as vi.[nvidia@localhost ~]$ sudo vi /etc/nvidia/gridd.confYou can create the /etc/nvidia/gridd.conf file by copying the supplied2.Set ServerAddress to the address of your local NVIDIA GRID License Server.The address can be a fully-qualified domain name such as, or an IP address such as 10.31.20.45.3.Optional: Set ServerPort to the port number of your local NVIDIA GRID LicenseServer.If you do not set ServerPort, it will default to 7070, which is the default portnumber that is used by the NVIDIA GRID License Server.4.Set FeatureType to 1, to license vGPU.5.Save your changes to the /etc/nvidia/gridd.conf file.6.Restart the nvidia-gridd service:[nvidia@localhost ~]$ sudo service nvidia-gridd restartThe service should automatically obtain a license.7.Optional: Confirm that the service has obtained a license by examining the logmessages written to /var/log/messages:[nvidia@localhost ~]$ sudo grep gridd /var/log/messages…Aug 5 15:40:06 localhost nvidia-gridd: Started (4293)Aug 5 15:40:24 localhost nvidia-gridd: License acquired successfully. Once configured in gridd.conf, licensing settings persist across reboots and need only be modified if the license server address changes, or the VM is switched to running GPU passthrough.gridd.conf file for GRID vGPUThe following example shows a gridd.conf file for GRID vGPU in which ServerAddress is set to , ServerPort is set to 7070, and FeatureType is set to 1.# /etc/nvidia/gridd.conf - Configuration file for NVIDIA Grid Daemon# This is a template for the configuration file for NVIDIA Grid Daemon.# For details on the file format, please refer to the nvidia-gridd(1)# man page.# Description: Set License Server Address# Data type: string# Format: "<address>"ServerAddress=# Description: Set License Server port number# Data type: integer# Format: <port>, default is 7070ServerPort=7070# Description: Set Feature to be enabled# Data type: integer# Possible values:# 1 => for GRID vGPU# 2 => for GRID Virtual WorkstationFeatureType=1# Description: Parameter to enable or disable Grid Licensing tab in nvidia-settings# Data type: boolean# Possible values: TRUE or FALSE, default is TRUE#EnableUI=TRUE# Description: Set license borrow period in minutes# Data type: integer# Possible values: 10 to 10080 mins(7 days), default is 10080 #Licenselnterval=10080This chapter describes how to enable GRID Virtual Workstation with passthrough on supported Tesla GPUs.3.1. GRID Virtual Workstation featuresGRID Virtual Workstation is available on Tesla GPUs running in GPU passthrough mode to Windows and Linux VMs. Virtual Workstation requires a GRID Virtual Workstation edition, and provides these features:‣Up to four virtual display heads at 4k resolution (unlicensed Tesla GPUs support a single virtual display head with maximum resolution of 2560×1600)‣Workstation-specific graphics features and accelerations‣Certified drivers for professional applications3.2. Licensing GRID Virtual Workstation on WindowsTo enable GRID Virtual Workstation on Windows, follow these steps:1.Open NVIDIA Control Panel:‣Right-click on the Windows desktop and select NVIDIA Control Panel from the menu.‣Open Windows Control Panel and double-click the NVIDIA Control Panel icon.2.In NVIDIA Control Panel, select the Manage License task in the Licensing sectionof the navigation pane, as shown in Figure 3.If the Licensing section and Manage License task are not displayed in NVIDIAControl Panel, the GPU or driver you are using do not support NVIDIA GRIDlicensed features.The Manage License task pane shows the current License Edition being used, and defaults to unlicensed.Figure 3 Managing Virtual Workstation Licensing in NVIDIA Control Panel3.Select GRID Virtual Workstation, and enter the address of your local GRID LicenseServer in the License Server field (see Figure 4).The address can be a fully-qualified domain name such as, or an IP address such as 10.31.20.45.Figure 4 Applying a GRID Virtual Workstation license4.Leave the Port Number field unset.It will default to 7070, which is the default port number used by NVIDIA GRID License Server.5.Click Apply to assign the settings.The License Edition section will indicate that your system is running in GRIDVirtual Workstation mode. The system will also request the appropriate licensefor the current GPU from the configured license server. If unsuccessful, the system warns you that it could not obtain a license. If necessary, refer to Troubleshooting for guidance on troubleshooting.Once configured in NVIDIA Control Panel, licensing settings persist across reboots. 3.3. Disabling GRID Virtual Workstation on WindowsTo disable the GRID Virtual Workstation licensed feature on Windows, follow these steps:1.Open NVIDIA Control Panel.2.In the Manage License task, select Tesla (unlicensed), as shown in Figure 5.Figure 5 Disabling GRID Virtual Workstation3.Click Apply.The setting does not take effect until the next time the system is shutdown or rebooted; GRID Virtual Workstation features remain available until then.3.4. Licensing GRID Virtual Workstation on Linux To license GRID Virtual Workstation on Linux, follow these steps:1.As root, open the file /etc/nvidia/gridd.conf in a plain-text editor, such as vi.[nvidia@localhost ~]$ sudo vi /etc/nvidia/gridd.confYou can create the /etc/nvidia/gridd.conf file by copying the supplied2.Set ServerAddress to the address of your local NVIDIA GRID License Server.The address can be a fully-qualified domain name such as, or an IP address such as 10.31.20.45.3.Optional: Set ServerPort to the port number of your local NVIDIA GRID LicenseServer.If you do not set ServerPort, it will default to 7070, which is the default portnumber that is used by the NVIDIA GRID License Server.4.Set FeatureType to 2, to license GRID Virtual Workstation.5.Save your changes to the /etc/nvidia/gridd.conf file.6.Restart the nvidia-gridd service:[nvidia@localhost ~]$ sudo service nvidia-gridd restartThe service should automatically obtain a license.7.Optional: Confirm that the service has obtained a license by examining the logmessages written to /var/log/messages:[nvidia@localhost ~]$ sudo grep gridd /var/log/messages…Aug 5 17:12:15 localhost nvidia-gridd: Started (10430)Aug 5 17:12:34 localhost nvidia-gridd: License acquired successfully. Once configured in gridd.conf, licensing settings persist across reboots and need only be modified if the license server address changes, or the VM is switched to running GRID vGPU.gridd.conf file for GRID Virtual WorkstationThe following example shows a gridd.conf file for GRID Virtual Workstation in which ServerAddress is set to , ServerPort is set to 7070, and FeatureType is set to 2.# /etc/nvidia/gridd.conf - Configuration file for NVIDIA Grid Daemon# This is a template for the configuration file for NVIDIA Grid Daemon.# For details on the file format, please refer to the nvidia-gridd(1)# man page.# Description: Set License Server Address# Data type: string# Format: "<address>"ServerAddress=# Description: Set License Server port number# Data type: integer# Format: <port>, default is 7070ServerPort=7070# Description: Set Feature to be enabled# Data type: integer# Possible values:# 1 => for GRID vGPU# 2 => for GRID Virtual WorkstationFeatureType=2# Description: Parameter to enable or disable Grid Licensing tab in nvidia-settings# Data type: boolean# Possible values: TRUE or FALSE, default is TRUE#EnableUI=TRUE# Description: Set license borrow period in minutes# Data type: integer# Possible values: 10 to 10080 mins(7 days), default is 10080#Licenselnterval=10080This chapter discusses advanced topics and settings for GRID licensing.4.1. Licenses obtained after bootUnder normal operation, a GRID license is obtained by a platform during boot, priorto user login and launch of applications. If a license is not available, as indicated by the license status on the Licensing tab of the NVIDIA Control Panel on Windows or log messages on Linux, the system will periodically retry its license request to the license server. During this time, GRID vGPU runs at full capability as described in vGPU license requirements.When a license is obtained, users are no longer warned that the vGPU has failed to obtain a license.4.2. Operating with intermittent connectivity to the license serverGRID vGPU and Virtual Workstation clients require connectivity to a license server when booting, in order to check out a license. Once booted, clients may operate without connectivity to the license server for a period of up to 7 days, after which time the client will be warned of license expiration.4.3. Applying Windows license settings via registryGRID licensing settings can be controlled via the Windows Registry, removing the need for manual interaction with NVIDIA Control Panel. Settings are stored in this registry key:HKEY_LOCAL_MACHINE\SOFTWARE\NVIDIA Corporation\Global\GridLicensingRegistry values are summarized in Table 5.T able 5 Licensing registry settingsFigure 6 shows an example of configuring virtual GPU licensing settings in the registry. Note it is sufficient to simply configure FeatureType = 1 (GRID vGPU) and set the license server address in ServerAddress.Figure 6 Configuring vGPU licensing via registry settingsThis chapter describes basic troubleshooting steps.5.1. Known issuesBefore troubleshooting or filing a bug report, review the release notes that accompany each driver release, for information about known issues with the current release, and potential workarounds.5.2. Troubleshooting stepsIf a GRID system fails to obtain a license, investigate the following as potential causes for the failure:‣Check that the license server address and port number are correctly configured.‣Run a network ping test from the GRID system to the license server address to verify that the system has network connectivity to the license server.‣Verify that the date and time are configured correctly on the GRID system. If the time is set inaccurately or is adjusted backwards by a large amount, the system may fail to obtain a license.‣Verify that the license server in use has available licenses of the type required by the GRID feature the GRID system is configured to use.GRID Licensing DU-07757-001 _v4.3 (GRID) | 17NoticeALL NVIDIA DESIGN SPECIFICATIONS, REFERENCE BOARDS, FILES, DRAWINGS, DIAGNOSTICS, LISTS, AND OTHER DOCUMENTS (TOGETHER AND SEPARATEL Y, "MATERIALS") ARE BEING PROVIDED "AS IS." NVIDIA MAKES NO WARRANTIES, EXPRESSED, IMPLIED, STATUTORY, OR OTHERWISE WITH RESPECT TO THE MATERIALS, AND EXPRESSL Y DISCLAIMS ALL IMPLIED WARRANTIES OF NONINFRINGEMENT, MERCHANTABILITY, AND FITNESS FOR A PARTICULAR PURPOSE.Information furnished is believed to be accurate and reliable. However, NVIDIA Corporation assumes no responsibility for the consequences of use of such information or for any infringement of patents or other rights of third parties that may result from its use. No license is granted by implication of otherwise under any patent rights of NVIDIA Corporation. Specifications mentioned in this publication are subject to change without notice. This publication supersedes and replaces all other information previously supplied. NVIDIA Corporation products are not authorized as critical components in life support devices or systems without express written approval of NVIDIA Corporation.HDMIHDMI, the HDMI logo, and High-Definition Multimedia Interface are trademarks or registered trademarks of HDMI Licensing LLC.OpenCLOpenCL is a trademark of Apple Inc. used under license to the Khronos Group Inc.TrademarksNVIDIA and the NVIDIA logo are trademarks or registered trademarks of NVIDIA Corporation in the U.S. and other countries. Other company and product names may be trademarks of the respective companies with which they are associated. Copyright© 2013-2017 NVIDIA Corporation. All rights reserved.。
,QWURGXFWLRQ BBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBB

7HFKQRORJ\ PDSSLQJ XVLQJ 6,6Laboratory 2in course “Logic synthesis”2002-versionWritten by Tomas Bengtsson and Shashi KumarÃÃ,QWURGXFWLRQ BBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBB'RFXPHQWV QHHGHG IRU WKLV ODEBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBB5HFRPPHQGHG SUHSDUDWLRQV IRU WKLV ODE BBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBB6KRUW LQWURGXFWLRQ WR )3*$V BBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBB,QIRUPDWLRQ DERXW &/%V XVHG LQ WKLV ODE BBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBB7DVNV BBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBB0DNLQJ VFULSWV IRU WHFKQRORJ\ PDSSLQJ BBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBB7HFKQRORJ\ PDSSLQJ RI PXOWLSOLHUBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBB7HFKQRORJ\ PDSSLQJ RI *UD\ FRGH FRQYHUWHU BBBBBBBBBBBBBBBBBBBBBBBBBBB7HFKQRORJ\ PDSSLQJ RI D EHQFKPDUN BBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBB$Q H[DPSOH RI 7HFKQRORJ\ PDSSLQJ BBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBB'HVFULSWLRQ RI H[DPSOH BBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBB6RPH WLSVBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBB7KH H[DPSOH WKURXJK 6,6BBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBBDecomposition_____________________________________________97.3.1. Gate7.3.2. LUTMapping_________________________________________________11commands_______________________________________127.3.3. Post-processing7.3.4. Programmable Logic Block Generation_____________________________14ÃÃ,QWURGXFWLRQAfter a circuit has been optimized using Logic Optimization tools, the next step is to bring the circuit closer to implementation by using the available information about implementation technology. This step is called Technology Mapping. This step involves converting the abstract description (FSM or Boolean functions) of the circuit to a network of limited type of components, normally from a library of components. Due to this reason, Technology Mapping is also sometimes referred as Library Binding. This step involves, selecting components from the library and forming a network of these components. Normally the objectives in Technology Mapping are to have the final implementation using a minimum number of components or to minimize the area of the implementation.Technology mapping to an FPGA results in the final implementation suitable for a specific FPGA type from a specific company. This is because the internal architecture of FPGAs from different companies is quite different. The internal architectures of various FPGAs from the same company also differ depending on the component series. For example, XILINX 4000 series FPGA has different type of logic blocks as compared to 3000 series. There are two further steps after a circuit has been converted to a network of blocks of a FPGA. These steps are called 3ODFHPHQW and 5RXWLQJ. In the placement step, the logic blocks in the network are assigned specific physical blocks within the FPGA. In the routing step, the used logic blocks are connected using programmable interconnection resources.In this laboratory, we are only concerned with the first step, which is converting the abstract design to a network of logic blocks for Xilinx FPGA family.'RFXPHQWV QHHGHG IRU WKLV ODEAmong the documents from the first lab you will need the document from UCLA (University of California Los Angeles), which describes the extension of SIS for technology mapping. In this document we recommend you to skip the first part and start reading the part starting with a header “Commands provided by UCLA FPGA Mapping Package”. This documents can be found in Appendix A of this lab manual.A “hand-in” form that you have to fill in to pass the lab is also given. That hand in form and this lab manual can be found in Pingpong.5HFRPPHQGHG SUHSDUDWLRQV IRU WKLV ODETo be able to use the lab time more efficient we recommend you to study the document from UCLA the part mentioned in section 2 “Documents needed for this lab”. It is also recommended that you complete the task described in section 6.1 “Task 1 Making scripts for technology mapping” before the lab.ÃÃ6KRUW LQWURGXFWLRQ WR )3*$VFPGAs are one family of programmable logic circuits. An FPGA contains programmable logic blocks and programmable interconnection between the blocks. The programmable blocks are called CLBs (Complex Logic Block). The CLBs contain one or more LUTs (Look Up Table). A LUT is a combinatory device with some inputs and one output. It can be programmed to realize any Boolean function. The CLB can be programmed so the output of the LUTs goes to the output of the CLB direct or via a flip-flop. This can be done individually for every LUT. The inputs to the CLB are connected to the inputs in the LUTs. If the CLB contains more than one LUT, some inputs to the CLB may be connected to inputs in more than one LUT.To connect outputs and inputs of CLBs to other CLBs and to the ports of a chip the programmable interconnection part is used. In this lab we are not going to deal with this. We are only going to map logic into fit CLBs. We will use some old FPGAs, Xilinx3000 – series and Xilinx4000 – series. For our purpose we don’t gain anything by using newer ones. The CLBs in both series has two LUTs. The LUTs in Xilinx3000 – series has four inputs and in Xilinx4000 – series they have five inputs.The picture below shows an example of a simple CLB. The CLBs we will use in this lab looks a little different.,QIRUPDWLRQ DERXW &/%V XVHG LQ WKLV ODEAs written in the previous section the LUTs in Xilinx 3000-series have four inputs each and in Xilinx 4000-series the LUTs have five inputs each. The parameter “-k” used in many technology-mapping commands should specify number of inputs to one LUT.ÃÃ7DVNV7DVN 0DNLQJ VFULSWV IRU WHFKQRORJ\ PDSSLQJIn this task you should prepare scripts for technology mapping. Make one script containing technology-mapping commands, which makes optimization with respect to area minimization for mapping to Xilinx 3000-series. Make another script doing the same but for minimizing the depth of the circuit. Copy those scripts and modify the copies to work for Xilinx 4000-series. You don’t need to put the final commands “match_3k” and “match_4k” into the scripts. You can write those commands in the SIS-prompt when you need them instead.Fill in the scripts in the “hand-in” form.7DVN 7HFKQRORJ\ PDSSLQJ RI PXOWLSOLHUIn this task you should use your multiplier from the previous lab and make technology mapping in some different ways. In this lab you should alter the following parameters:• You can either use technology-independent optimization before you make technology mapping or you can skip technology-independent optimization. When you are making technology-independent optimization in this task you should use “rugged-script”• You can optimize for area or for depth. To do this you should use your scripts from the previous task.• You can technology-map for either Xilinx 3000-series or Xilinx 4000-series.The alternatives enumerated above makes eight different combinations of optimizations. Make those and fill in the required results in the “hand-in” form. There are also some questions in the “hand-in” form you should answer.7DVN 7HFKQRORJ\ PDSSLQJ RI *UD\ FRGH FRQYHUWHUIn this task you should use the “Gray-code to binary converter” you have made in the previous lab. The task is to technology-map it so it fits into two CLBs in Xilinx 3000-series. Do this and answer the questions in the “hand-in” form!7DVN 7HFKQRORJ\ PDSSLQJ RI D EHQFKPDUNIn this task you should technology-map the benchmark “t481.pla”. You should map it so that it only requires five LUTs in Xilinx 3000-series. This is the goal of this task and you decide what should be done to get there. Answer the questions in the “hand-in”-form!$Q H[DPSOH RI 7HFKQRORJ\ PDSSLQJ'HVFULSWLRQ RI H[DPSOHTo describe an example of technology mapping, an FSM to control one traffic light is used. This traffic-light controller is nothing that can be used in traffic rather it can be used to show a traffic light fitting in a fair. The controller is made as a Moore-machine.ÃÃThe FSM has three inputs. The first input let the traffic-light run in normal mode if it’s “0”, and in a mode with twinkle amber (amber ≈ yellow) if it is “1”. In the normal mode the traffic light is red, green or it is on its way between. If the second input is “1”, when the traffic light is green, it is forced to red via amber. If the third input is “1”, when the traffic light is red, it is forced to green via red_amber.The outputs from the FSM are signals to the three lamps. It is in the order green, amber and red, and “1” means on.The state-diagram below shows the system.ÃÃA description of this in kiss-format is shown below:.start_kiss.i 3.o 300- green green 10001- green amber 1001-- green twinkle_amber 1000-- amber red 0101-- amber twinkle_dark 0100-0 red red 0010-1 red red_amber 0011-- red twinkle_amber 0010-- red_amber green 0111-- red_amber twinkle_amber 0110-- twinkle_amber red 0101-- twinkle_amber twinkle_dark 0100-- twinkle_dark amber 0001-- twinkle_dark twinkle_amber 000.end_kiss.endThis file is available as “/home/beto/public/logic_synthesis/traf.kiss” in the UNIX-system.6RPH WLSVIt’s good to use commands like “print_stats” and “print_level” to see what is happening between the different steps in the optimization and mapping process. Also remember that “write_blif” can give some useful information in some cases.7KH H[DPSOH WKURXJK 6,6First we make the technology independent optimization. (That is what the first laboratory was about.) We use “state_minimize”, “state_assign” and then run “rugged-script”. We then get: UC Berkeley SIS with UCLA FPGA Extension (compiled 2-Apr-98 at 11:09 PM) VLV! UHDGBNLVV WUDI NLVV.start_kissVLV! VWDWHBPLQLPL]HRunning stamina, written by June Rho, University of Colorado at Boulder Number of states in original machine : 6Number of states in minimized machine : 5VLV! VWDWHBDVVLJQRunning nova, written by Tiziano Villa, UC BerkeleyWarning: network ‘SISEAAa29918’, node "v0" does not fanoutWarning: network ‘SISEAAa29918’, node "v1" does not fanoutWarning: network ‘SISEAAa29918’, node "v2" does not fanoutVLV! VRXUFH UXJJHGVLV! ZULWHBEOLI.model traf.kiss.inputs IN_0 IN_1 IN_2.outputs OUT_0 OUT_1 OUT_2.latch v6.0 LatchOut_v3 1.latch v6.1 LatchOut_v4 1ÃÃ.latch v6.2 LatchOut_v5 0.start_kiss.i 3.o 3.p 12.s 5.r S10-- S0 S2 0101-- S0 S3 0100-0 S2 S2 0010-1 S2 S4 0011-- S2 S0 0010-- S3 S0 0001-- S3 S0 0000-- S4 S1 0111-- S4 S0 01100- S1 S1 10001- S1 S0 1001-- S1 S0 100.end_kiss.latch_order LatchOut_v3 LatchOut_v4 LatchOut_v5.code S0 000.code S2 111.code S3 001.code S4 010.code S1 110.names LatchOut_v3 LatchOut_v5 OUT_010 1.names LatchOut_v3 LatchOut_v5 OUT_100 1.names OUT_0 LatchOut_v4 OUT_201 1.names v6.1 v6.2 LatchOut_v5 v6.011- 11-0 1.names IN_0 IN_1 OUT_1 OUT_2 LatchOut_v5 v6.10-1-- 10--1- 100--0 1.names IN_0 IN_2 LatchOut_v4 LatchOut_v5 v6.2--00 10011 1.exdc.inputs IN_0 IN_1 IN_2 LatchOut_v3 LatchOut_v4 LatchOut_v5 .outputs v6.0 v6.1 v6.2 OUT_0 OUT_1 OUT_2.names LatchOut_v3 LatchOut_v4 LatchOut_v5 v6.010- 1011 1.names LatchOut_v3 LatchOut_v4 LatchOut_v5 v6.110- 1011 1.names LatchOut_v3 LatchOut_v4 LatchOut_v5 v6.210- 1011 1.names LatchOut_v3 LatchOut_v4 LatchOut_v5 OUT_010- 1011 1.names LatchOut_v3 LatchOut_v4 LatchOut_v5 OUT_1ÃÃ10- 1011 1.names LatchOut_v3 LatchOut_v4 LatchOut_v5 OUT_210- 1011 1.endThe key-word “.exdc” means that the following blif-description is the don’t-care-set. The description above is the optimized description of the function where don’t-cares are forced to one and zero to make the function as small as possible.*DWH 'HFRPSRVLWLRQIn the description of technology mapping from UCLA, it’s written that command“tech_decomp” should be run before “dmig”-command is run. The parameter “-k 4” in the “dmig”-command is chosen to 4 because the plan is to map this to an FPGA with 4-input LUTs.VLV! WHFKBGHFRPS D RVLV! GPLJ NVLV! ZULWHBEOLI.model traf.kiss.inputs IN_0 IN_1 IN_2.outputs OUT_0 OUT_1 OUT_2.latch v6.0 LatchOut_v3 1.latch v6.1 LatchOut_v4 1.latch v6.2 LatchOut_v5 0.start_kiss.i 3.o 3.p 12.s 5.r S10-- S0 S2 0101-- S0 S3 0100-0 S2 S2 0010-1 S2 S4 0011-- S2 S0 0010-- S3 S0 0001-- S3 S0 0000-- S4 S1 0111-- S4 S0 01100- S1 S1 10001- S1 S0 1001-- S1 S0 100.end_kiss.latch_order LatchOut_v3 LatchOut_v4 LatchOut_v5.code S0 000.code S2 111.code S3 001.code S4 010.code S1 110.names LatchOut_v3 LatchOut_v5 OUT_010 1.names LatchOut_v3 LatchOut_v5 OUT_1ÃÃ00 1.names OUT_0 LatchOut_v4 OUT_201 1.names [21] [22] v6.01- 1-1 1.names [25] [26] [27] v6.11-- 1-1- 1--1 1.names [23] [24] v6.21- 1-1 1.names v6.1 LatchOut_v5 [21]10 1.names v6.1 v6.2 [22]11 1.names IN_0 IN_2 LatchOut_v4 LatchOut_v5 [23]0011 1.names LatchOut_v4 LatchOut_v5 [24]00 1.names IN_0 IN_1 LatchOut_v5 [25]000 1.names IN_0 OUT_2 [26]01 1.names IN_0 OUT_1 [27]01 1.exdc.inputs IN_0 IN_1 IN_2 LatchOut_v3 LatchOut_v4 LatchOut_v5 .outputs v6.0 v6.1 v6.2 OUT_0 OUT_1 OUT_2.names LatchOut_v3 LatchOut_v4 LatchOut_v5 v6.010- 1011 1.names LatchOut_v3 LatchOut_v4 LatchOut_v5 v6.110- 1011 1.names LatchOut_v3 LatchOut_v4 LatchOut_v5 v6.210- 1011 1.names LatchOut_v3 LatchOut_v4 LatchOut_v5 OUT_010- 1011 1.names LatchOut_v3 LatchOut_v4 LatchOut_v5 OUT_110- 1011 1.names LatchOut_v3 LatchOut_v4 LatchOut_v5 OUT_210- 1011 1.endÃÃ/87 0DSSLQJWhen gate decomposition is done there are some commands to choose between, which map the function to LUTs (Look Up Tables).VLV! GDJPDS NVLV! ZULWHBEOLI.model traf.kiss.inputs IN_0 IN_1 IN_2.outputs OUT_0 OUT_1 OUT_2.latch v6.0 LatchOut_v3 1.latch v6.1 LatchOut_v4 1.latch v6.2 LatchOut_v5 0.start_kiss.i 3.o 3.p 12.s 5.r S10-- S0 S2 0101-- S0 S3 0100-0 S2 S2 0010-1 S2 S4 0011-- S2 S0 0010-- S3 S0 0001-- S3 S0 0000-- S4 S1 0111-- S4 S0 01100- S1 S1 10001- S1 S0 1001-- S1 S0 100.end_kiss.latch_order LatchOut_v3 LatchOut_v4 LatchOut_v5.code S0 000.code S2 111.code S3 001.code S4 010.code S1 110.names LatchOut_v3 LatchOut_v5 OUT_010 1.names LatchOut_v3 LatchOut_v5 OUT_100 1.names LatchOut_v3 LatchOut_v4 LatchOut_v5 OUT_201- 1-11 1.names [21] [22] v6.01- 1-1 1.names [25] [26] [27] v6.11-- 1-1- 1--1 1.names IN_0 IN_2 LatchOut_v4 LatchOut_v5 v6.2--00 10011 1.names LatchOut_v5 [25] [26] [27] [21]01-- 1ÃÃ0-1- 10--1 1.names v6.2 [25] [26] [27] [22]11-- 11-1- 11--1 1.names IN_0 IN_1 LatchOut_v5 [25]000 1.names IN_0 LatchOut_v3 LatchOut_v4 LatchOut_v5 [26]001- 10-11 1.names IN_0 LatchOut_v3 LatchOut_v5 [27]000 1.exdc.inputs IN_0 IN_1 IN_2 LatchOut_v3 LatchOut_v4 LatchOut_v5.outputs v6.0 v6.1 v6.2 OUT_0 OUT_1 OUT_2.names LatchOut_v3 LatchOut_v4 LatchOut_v5 v6.010- 1011 1.names LatchOut_v3 LatchOut_v4 LatchOut_v5 v6.110- 1011 1.names LatchOut_v3 LatchOut_v4 LatchOut_v5 v6.210- 1011 1.names LatchOut_v3 LatchOut_v4 LatchOut_v5 OUT_010- 1011 1.names LatchOut_v3 LatchOut_v4 LatchOut_v5 OUT_110- 1011 1.names LatchOut_v3 LatchOut_v4 LatchOut_v5 OUT_210- 1011 1.end3RVW SURFHVVLQJ FRPPDQGVThe post-processing command “mpack” can for some cases merge two LUTs into one LUT. VLV! PSDFN NVLV! ZULWHBEOLI.model traf.kiss.inputs IN_0 IN_1 IN_2.outputs OUT_0 OUT_1 OUT_2.latch v6.0 LatchOut_v3 1.latch v6.1 LatchOut_v4 1.latch v6.2 LatchOut_v5 0.start_kiss.i 3.o 3.p 12.s 5.r S10-- S0 S2 0101-- S0 S3 010ÃÃ0-0 S2 S2 0010-1 S2 S4 0011-- S2 S0 0010-- S3 S0 0001-- S3 S0 0000-- S4 S1 0111-- S4 S0 01100- S1 S1 10001- S1 S0 1001-- S1 S0 100.end_kiss.latch_order LatchOut_v3 LatchOut_v4 LatchOut_v5.code S0 000.code S2 111.code S3 001.code S4 010.code S1 110.names LatchOut_v3 LatchOut_v5 OUT_010 1.names LatchOut_v3 LatchOut_v5 OUT_100 1.names LatchOut_v3 LatchOut_v4 LatchOut_v5 OUT_201- 1-11 1.names [21] [22] v6.01- 1-1 1.names [25] [26] [27] v6.11-- 1-1- 1--1 1.names IN_0 IN_2 LatchOut_v4 LatchOut_v5 v6.2--00 10011 1.names LatchOut_v5 [25] [26] [27] [21]01-- 10-1- 10--1 1.names v6.2 [25] [26] [27] [22]11-- 11-1- 11--1 1.names IN_0 IN_1 LatchOut_v5 [25]000 1.names IN_0 LatchOut_v3 LatchOut_v4 LatchOut_v5 [26]001- 10-11 1.names IN_0 LatchOut_v3 LatchOut_v5 [27]000 1.exdc.inputs IN_0 IN_1 IN_2 LatchOut_v3 LatchOut_v4 LatchOut_v5 .outputs v6.0 v6.1 v6.2 OUT_0 OUT_1 OUT_2.names LatchOut_v3 LatchOut_v4 LatchOut_v5 v6.010- 1011 1.names LatchOut_v3 LatchOut_v4 LatchOut_v5 v6.110- 1011 1ÃÃ.names LatchOut_v3 LatchOut_v4 LatchOut_v5 v6.210- 1011 1.names LatchOut_v3 LatchOut_v4 LatchOut_v5 OUT_010- 1011 1.names LatchOut_v3 LatchOut_v4 LatchOut_v5 OUT_110- 1011 1.names LatchOut_v3 LatchOut_v4 LatchOut_v5 OUT_210- 1011 1.end3URJUDPPDEOH /RJLF %ORFN *HQHUDWLRQIn our installation of SIS it is possible to map to Xilinx 3000 and 4000 –series.VLV! PDWFKB N Y##PI=3 #PO=3 #LUT=11 #CLB=6 #LEVEL=3#0001: ( OUT_2 , v6.2 )#0002: ( OUT_1 , [26] )#0003: ( OUT_0 , [27] )#0004: ( v6.1 , [21] )#0005: ( v6.0 , [25] )#0006: ( [22] ) sis> match_3k -vThe argument “-v” makes it print the list about which LUTs should be in the same CLB. $SSHQGL[$SSHQGL[ $+--------------------------------------------------------------------------+ | RASP_SYN: LUT-Based FPGA Technology Mapping Package (Release B 1.0) | | -- Synthesis Core of the UCLA RASP Systems | +--------------------------------------------------------------------------+ | Copyright (C) 1991-1997 the Regents of University of California | +--------------------------------------------------------------------------+ | Authors: Eugene Ding, VLSI CAD Lab, UCLA CS Dept. <eugene@> | | Yean-Yow Hwang, VLSI CAD Lab, UCLA CS Dept.<yeanyow@>| | Chang Wu, VLSI CAD Lab, UCLA CS Dept. <changwu@> | | Songjie Xu, VLSI CAD Lab, UCLA CS Dept. <sxu@> | | Project Director: Prof. Jason Cong, UCLA CS Dept. <cong@> | +--------------------------------------------------------------------------+ | This release includes the following mapping algorithms: | | DAG_Map version 1.0 | | FlowMap version 2.1 | | FlowMap-r version 2.0 | | FlowSYN version 2.0 | | CutMap version 1.2 | | ZMap version 1.0 | | TurboMap version 1.0+--------------------------------------------------------------------------+ -------------------<0> ACKNOWLEDGEMENTÃÃ-------------------The FlowMap and CutMap and TurboMap packages are integrated into the SIS system and uses many of the routines provided by SIS. The SIS system was developed in UC Berkeley Electronic Research Lab.--------------------------------------<1> RELEASE AGREEMENT AND CONTACT INFO--------------------------------------Please refer to "release.statement".-----------<2> CONTENT-----------sis -- binary of SIS compiled with FlowMap andCutMap packages.doc -- this file.release.statement -- to be read first.rasp_syn -- a csh script of FPGA mappingselect -- mapping result selectorThis release contains programs primarily developed by September 1997. More functions will be added to future release when they are stablized. It runs on Sun SPARCstation under SunOS 4.1.3 and Solaris.Some commands are not included in the release due to nondisclosure agreement.RASP_SYN package provides a complete solution to SRAM-based FPGA mapping engine. The entire flow of RASP_SYN is:1. gate decomposition to get K-bounded circuit, where K is thefanin limit of LUTs of the target architecture2. generic LUT mapping3. post-processing mainly for area reduction4. architecture specific mapping.RASP_SYN comes with a user-friendly csh script for the ease of use. However, you can modify the script or write your own based on your specific needs.------------------------<3> TECHNICAL REFERENCES------------------------J. Cong, Y. Ding, "An Optimal Technology Mapping Algorithm for DelayOptimization in Lookup-Table based FPGA Designs," IEEE Trans. on CAD, Vol. 13, No. 1, Jan. 1994, pp. 1-12.J. Cong, Y. Ding, "On Area/Depth Trade-off in LUT-Based FPGA Technology Mapping," IEEE Trans. on VLSI Systems, Vol 2., No. 2, June 1994,pp. 137-148.J. Cong, Y. Ding, T. Gao, K. Chen, "LUT-Based FPGA Technology Mappingunder Arbitrary Net-Delay Models," Computers & Graphics,Vol.18, No.4, 1994, 507-516.J. Cong, Y. Ding, "Beyond the Combinatorial Limit in Depth Minimization for LUT-Based FPGA Designs," Proc. 1993 IEEE/ACM Int’l Conf. on CAD,Santa Clara, CA, Nov. 1993, pp. 110-114.K.Chen, J.Cong, Y.Ding, A.Kahng, P.Trajmar, "DAG-MAP: Graph-BasedÃÃFPGA Technology Mapping for Delay Optimization," IEEE Design & Testof Computers, Sept. 1992J. Cong, J. Peck, Y. Ding, "RASP: A General Logic Synthesis System forSRAM-based FPGAs," Proc. ACM 4th Int’l Symp. on FPGA, pp. 137-143, 1996J. Cong, Y. Hwang, "Simultaneous Depth and Area Minimization in LUT-BasedFPGA Mapping," Proc. ACM 3rd Int’l Symp. on FPGA, Feb. 1995, pp. 68-74.J. Cong, Y. Hwang, "Structural Gate Decomposition for Depth-OptimalTechnology Mapping in LUT-based FPGA Designs," Proc. ACM/IEEE 33rdDesign Automation Conf., pp. 726-729, 1996.J. Cong, C. Wu, "An Improved Algorithm for Performance Optimal TechnologyMapping with Retiming in LUT-Based FPGA Design," Proc. IEEE InternalConference on Computer Design, pp. 572-578, 1996Xilinx, FPGA Data Book, 1994---------<4> USAGE---------4.1 Running with a super scriptSuper Script of UCLA FPGA MappingUsage: rasp_syn circuit -sis path -k k -device xc3k/xc4k -algo algo -relax r -objective area/delay/tradeoff/allRasp_syn is a csh script for an easy usage of UCLA FPGA Mapping algorithms.In default, the input is in EQN format with extension .eqn. The output isan LUT network with/without matching information in EQN format as well.Please keep the program "select" in the current directory.To use other data formats as BLIF or SLIF which are supported by SIS of UCB, please set FMT in rasp_syn script to blif or slif and use .blif or .slifas the name extension of the input file. The output format will be changed automatically, except the CLB matching file format, which will be keptin EQN format. For Xilinx XC3K/XC4K CLBs, the CLB clustering informationwill be presented as:#CLB_number: (lut1, lut2)lut1 = ..lut2 = ..There are two ways to run rasp_syn:1. Running with single given mapping algorithmThe algorithm must be specified with option -algo algorithm. The targetis K-LUT. The output circuit is in circuit.k in EQN format.2. Running with multiple algorithmsRasp_syn can run all the built-in algorithms automatically and returnthe best result (in terms of area or delay) or a set of resultsbased on area-delay tradeoff or all the results for you.To run multiple algorithms, you simply do not specify any algorithm with-algo option.OptionsÃÃ-sis Specify the path of sis. The default is sis and the pathmust be specified in the environment.-k Used only in single algorithm mode. K is the input numberof LUTs. The output is in circuit.k.-device Used only in multi-algorithm mode. This is the default mode. The current supported devices are:xc3k Xilinx XC3000 Familyxc4k Xilinx XC4000 Family-algo Specify the mapping algorithm in single algorithm mode.The current supported algorithms are:flowmap: FlowMapflowmap-r: FlowMap-rflowsyn: FlowSYNcutmap: CutMapzmap: ZMap for delayzma: ZMap for area-relax Used only in single algorithm mode with FlowMap-r.R is the depth relaxation.-objective Used only in multi-algorithm mode. The objective can be:area: Area first. This is the default objective.delay: Depth firsttradeoff: Area-delay tradeoffall: All the results4.2 Running SIS without the super scriptSIS is a complete logic synthesis package. All of the following commands have been built in SIS which can be run directly from SIS.Commands provided by UCLA FPGA Mapping Package--------------------------------------------------------------------1. Gate Decomposition Commands* dmig [ -k <K_value> ] [ -f ]Decompose a simple gate network into a K-bounded network(i.e. each gate has no more than K inputs), orcomplex gates into K-bounded gates with -f option.For obtaining a simple gate network, use sis command"tech_decomp -a 1000 -o 1000."-k specifies max. gate input size K, with a default value 2.-f decompose complex gates in the network* dogma [ -k <K_value> ]Decompose a simple gate network into a 2-bounded networksuch that flowmap, cutmap, or zmap can obtain a best (small) depth.-k specifies the LUT input size K, with a default value 5.--------------------------------------------------------------------2. LUT Mapping Commands* dagmap [ -k <K_value> ]Map a K-bounded network into a K-LUT network of small depthÃÃ(might not be optimal).-k specifies the LUT input size K, with a default value 5.* flowmap [ -k <K_value> ] [-r <R_value> ] [ -s <S_value> ]Map a K-bounded network into a K-LUT network of optimal depth,or within the optimal depth plus R.Area can be further reduced by post-processing packing routines.-k specifies the LUT input size K, with a default value 5.-r specifies the relaxed depth value R.If -r is not used, every node is at its optimal depth,-r 0 will trade depth on non-critical paths for a smaller area(the LUT network still has an optimal depth),-r R will allow depth to increase by R (then dfmap is called toreduce the area).-s specifies the cone input size S for which resynthesis of conesare performed for a smaller LUT network depth.* dfmap [ -k <K_value> ]Map a K-bounded network into a K-LUT network of optimal areaWITHOUT any node duplication.It is used after flowmap -r and mffc_shrink, and is followedby a LUT packing procedure. For example, we use dfmap in"flowmap -k 5 -r 1; mffc_shrink -k 5; dfmap -k 5; greedy_pack -k 5"-k specifies the LUT input size K, with a default value 5.* cutmap [ -k <K_value> ] [-x ]Map a K-bounded network into a K-LUT network of optimal depthwith simultaneous area minimization.Area can be further reduced by post-processing packing routines.-k specifies the LUT input size K, with a default value 5.-x specifies depth relaxation on non-critical paths.* zmap [ -k <K_value> ] [-c ]Map a K-bounded network into a K-LUT network of optimal depthwith simultaneous area minimization (cut enumeration approach).Area can be further reduced by post-processing packing routines.-k specifies the LUT input size K, with a default value 5.-c will minimize area only with no bound on depth* turbomap [ -k <K_value> ] [-c <clock_value> ] [ -a <area_reduction> ]Map a K-bounded network into a K-LUT network with the minimum clockperiod. Area can be further reduced by post-processing packing routines.-k specifies the LUT input size K,default value: 5.-c specifies an upper-bound on the clock period,-1: no upper-bound, (default)。
带有工艺尺寸限制说明的cadence-ic5141教程Diva验证工具的使用说明
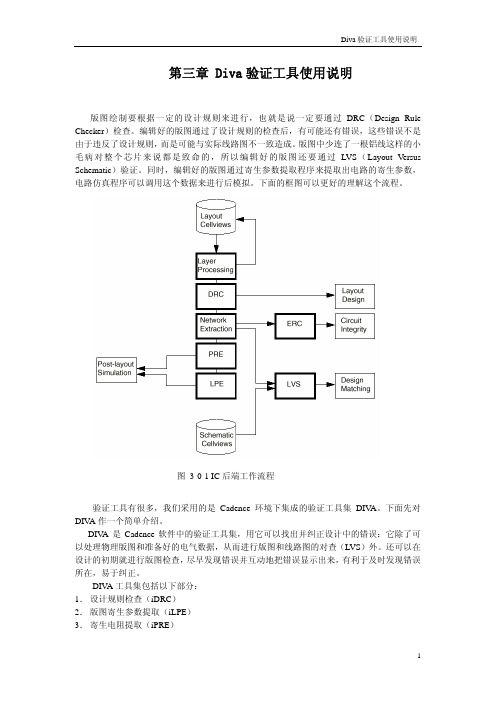
接下来,就是LVS检查了。在diva中,由于版图提取在extract中就已经完成,LVS文件
4
Diva 验证工具使用说明
中的逻辑结构相对就比较简单。只需进行网表比较,参数比较,以及把一些“并联或串联” 的元器件归并等即可。所以这一部分文件不会因为工艺层次不同而有很大不同,可以根据范 本做少许改动。 以下只介绍一下LVS的基本结构:
和“(”之间同样不能有空格,否则系统会提示没有drc语句。从上面讨论不难看出,DIVA
规则文件的编写对格式有一定要求。
在规则文件中我们还可以看到saveDerived语句,如:saveDerived(geomAndNot(pgate
nwell) "p mos device must in nwell"),这一句将输出不在nwell内部的pgate(pmos),
这种写法在规则文件的编写中经常碰到,要熟练掌握。
另外,在DRC文件中,引号引出的行是注释行。
以上就是对DRC文件编写的一些简单介绍,对于其中使用的关键字,作者有专门的说明
文章,同时在本文后面作者还会给出一个完整的DRC校检文件并给出详细说明,读者可以参
照它,以加深对文件编写的理解。
§ 3-2 版图提取文件的介绍
saveRecognition 这个命令将提取产生的可以识别的图形保存下来。通常和 extractDevice语句中的识别层一致。 saveRecognition( ngate "ngate" ) saveRecognition( pgate "pgate" ) 以上就是对extract文件的一个简要介绍,读者可以参看附录中完整的例子,以加深对它的 理解。
Vaisala QML201C数据记录仪说明书

Vaisala Data Logger QML201CThe QML201C The Vaisala Data Logger QML201C incorporates Vaisala’s proven sensor technology. A 32-bit central processing unit (CPU), 24-bit A/D conversion (ADC), autocalibrationof the ADC and measurementelectronics coupled with advanced data quality control and validation software all ensure the accuracy of data measurement. Easy to use Sensor measurements, statisticalcalculations, data logging anddata transmissions are performedaccording to a user-configuredVaisala Setup Software Lizard. Thesoftware has many setup options andadvanced features.ExpandabilityThe systems architecture enables theQML201C to be easily upgraded with The Vaisala Data Logger QML201Cnew sensors, calculations, output formats, and logging schedules at any time to accommodate users’ changing requirements. The basic system provides RS-232, RS-485 and SDI-12 ports for interfacing with almost any type of telemetry, terminal, displays, and smart sensors. With optional plug-in modules the number of serial ports can be enhanced from 3 up to 9 ports, enabling multiple RS-232, RS-485, SDI-12 and Ethernet connections.The QML201C data logger is also expandable with a multiplexer unit offering additional 10 differential analog channels or even another QML201C unit. A digital I/O unit adds 8 digital outputs and 8 digital inputs for sensors, power optimizing and unmanned control functions based on user defined requirements.Features/Benefits ▪Easy to install, economical to maintain and upgrade ▪Field-proven reliability and accuracy in harsh environments ▪Low power consumption ▪Extensive calculation and data logging capability ▪Good expandability and high level of customization through open and modular design▪Built-in TCP/IP connectivity ▪Compact designTechnical dataRef. B210718EN-C ©Vaisala 2010This material is subject to copyright protection, with all copyrights retained by Vaisala and its individual partners. Allrights reserved. Any logos and/or product names are trademarksof Vaisala or its individual partners. The reproduction, transfer,distribution or storage of information contained in this brochurein any form without the prior written consent of Vaisala is strictlyprohibited. All specifications — technical included — are subjectto change without notice.For more information, visit or contact *********************General Processor 33 MHz, 32-bit Motorola Memory 4MB RAM and 4 MB program flash A/D conversion 24 bit Data logging memory 3.3 MB internal flash memory Up to 2GB on optional, compactflash memory cardSensor inputs 10 analog inputs (20 single-ended inputs) 2 counter/frequency inputs Internal channel for BARO-1 pressure transducer SERiAl CommuNiCATioN Standard one RS-232, RS-485 (two-wire) and SDI-12Optional T wo optional plug-in slots for communication modules to increase the number of the serial I/O channels up to 6 pcs Fast serial expansion bus connecting e.g. digital I/O module Speed 300 ... 38400 bps Parameters Configurable speed, start bits, data bits, stop bits, parity , XON/XOFF , and checksum V oltage (external powering)8 ... 30 VDC Power consumption (typically with 5 sensors)<10 mA/12V Temperature operating -50 ... +60 °C (-58 ... 140 °F) extended operating -60 ... +70 °C (-76 ... 158 °F)storage -60 ... +70 °C (-76 ... 158 °F)Humidity 0 ... 100 %RH EThERNET CommuNiCATioN Standard IEEE 802.3T wo plug-in slots for ethernet modulesSpeed 10 Mbps (10 BASE-T)Can also be connected to 100 Mbps/1000 Mbps 100/1000 BASE-T networks with 10 Mbps Parameters Full/half duplex with auto-negotiation TCP/iP Supported protocols ARP , UDP/IP , TCP/IP , FTP , SMTP , PPP (with PAP or CHAP authentication), HTTP(get), Telnet, ICMP Echo, DHCP , ARP , NTP , DNS, serial port tunneling over TCP/IPAccuracyAll data for ambient temperature range -50 ... +60 °C unless otherwise specified Temperature measurement (PT100 sensor, measurementrange -50 ... +80 °C)Typical uncertainty over temperature range: -50 ... +60 °C < ±0.04 °Ctemperature range :-60 ... +70 °C < ±0.08 °CMax. error overtemperature range: -40 ... +50 °C < ±0.10 °C Max. error at 0 °C < ±0.04 °CV oltage measurement uncertainty , temperature range -50 ... +60 °C ±5.0 V range < 0.06 % of reading ±100 µV ±2.5 V range < 0.04 % of reading ±50 µV±250 mV range < 0.06 % of reading ±6 µV ±25 mV range < 0.06 % of reading ±5 µVV oltage measurement uncertainty , temperature range -60 ... +70 °C±5.0 V range < 0.10 % of reading ±150 μV±2.5 V range < 0.08 % of reading ±80 μV ±250 mV range < 0.10 % of reading ±10 μV ±25 mV range < 0.10 % of reading ±10 μV Frequency measurements ±0.003 % + resolution up to 20 kHz Common mode range +7 V/-3 V Real-time clock (standard)accuracy Better than 20 s/month back-up time minimum 5 yrs. with CR1220 Lithium cell Regulatory compliances Emission CISPR 22, class B (EN55022)ESD immunity IEC6100-4-2RF field immunity IEC6100-4-3EFT immunity IEC6100-4-4Surge (lightning pulses)IEC6100-4-5Conducted RF immunity IEC6100-4-6。
Netcool ITNM GIS 指南说明书

ContextThis guide provides a field overview of the Netcool ITNM GIS. It serves as an addendum to the general GIS information available via IBM knowledge Center as perhttps:///support/knowledgecenter/en/SSSHRK_4.2.0/visualize/task/viz_configuring geographicalviews2.htmlAll information is current as of ITNM 4.2 FP10, July 2020.IntroductionOnce installed, your Netcool ITNM UI components shall include the artifacts to run GIS enriched maps.The browser is served these maps and the base OpenLayers libraries from the DASH server $JAZZSM_HOME/profile/installedApps/JazzSMNode01Cell/isc.ear/ncp_gis.war, for example/opt/IBM/netcool/IBM/JazzSM/profile/installedApps/JazzSMNode01Cell/isc.ear/ncp_gis.warDiagram 1.0, is a high level architectural sequence flow for how GIS enrichment and GIS maps are served to the endUser.Diagram 1.0 - High Level ArchitectureDiagram 1.0, shows the loading and rendering steps involved in the ncp_gis module, which are useful to understand when debugging , analyzing logs or customizing in the future.The basic architecture is that of RESTful service which supplies geo-enriched topology to the OpenLayers JS widget, which then plots the markers (icons), polylines (links) and collects event status from Omnibus WebGUI for those topological entities.To avoid confusion, ncp_gis is not related to nor does it re-use any of the logical maps technology in ITNM, such as Network Views, Hop Views, etc. That technology stack is provided from a 3rd party commercial licensed technology stack, known as TomSawyer. The GIS maps (ncp_gis) in ITNM are built upon OpenLayers technology, therefore the operation and customization of Network Views, should not be confused with ncp_gis, they are simply different technology stacks.The ncp_gis content is served within a DASH widget, but it can also be viewed as an independent view, once a DASH authentication is present within the browser session from the URL, h ttps://server:port/ibm/console/ncp_gis/NetKitMapWidget.jsp. This URL we call the direct URL for naming convention.Logs and DebuggingLoggingThe logging in ncp_gis is in 2 parts, browser/client logs and server-side logs.Client LogsBrowser logs can be viewed from the Developer Tools Console of the WebBrowser.These logs cover the loading of OpenLayers libraries, any of the rendering of icons or links and the requests for topology and/or status.In most browsers, the developer tools are fully loaded with Console lOgs, Source Analysis, Network tracing and Performance toolkits. Within Netcool development, we tend to use both Google Chrome and Firefox for development, debugging and analysis.The following is an example of the Developer Tools Console logs for ncp_gis from the direct URLDiagram 2.0 - Web Console of ncp_gis from Google ChromeThese logs are useful when collecting information about missing icons, failures to load the maps etc. The logs themselves can be saved for transmission to IBM Level Support, by right clicking on the console log and selecting “save as”.Server LogsAs shown in the Diagram 1.0 - High Level Architecture , Step 3, invokes the RESTFul Services to load topology (aggregated or non-aggregated based on the regional aggregation used during discovery). These RESTFul services are contained within the ncp_rest module and their respective logs are location on the DASH JazzSM server at the NCP UI install path/opt/IBM/netcool/gui/precision_gui/profile/logs/tnmThe server side logs simply contain the log of the REST invocations and the underpinning dB queries, known as CTEs (Common Table Expressions) along with some info on their performance.It is often best to attempt to track performance or result based analysis front the client based logs rather than the server-side logs in ncp_gis, due to the size and volume of data that is beingreturned. This topic is covered in the next section.DebuggingRESTFul InvocationsPossibly, the most common of debug scenarios is the no-topology or slow-topology rendering scenario. The best method for analysing this scenario is to look at the RESTFul invocation from the browser via the Developer Tools -> Network toolkit.Each topology RESTFul service has a set of instrumentation data inlined in the REST JSON response. There are 2 RESTFul Services invoked on ITNM:Topology Locations- Returns the location data, gis coordinates, iconography, regional structures, etc. It’s served from the RESTFul Service Interface:https://server:port/ibm/console/nm_rest/topology/locations/?aggToRegion=trueTopology Connections- Returns a set of edges for the topology, indication which topology markers should be connected to each other and describes the layers, density of connections etc. It’s served from the RESTFul Service Interface :https://server:port/ibm/console/nm_rest/topology/connections/collectionIdsIn the Developer Toolkit -> Network tab, filter the requisition using the term “locations” as shown on the Diagram 2.1.Diagram 2.1 - Filtering Network Traffic by Locations RESTFul Service invocationThis will reduce the profile data to the applicable calls. Select 1 of the calls, the first is the overall call to load all scoped topology. The timing tab will show how long the RESTFul Service call has taken from the browsers perspective: see Diagram 2.2 below.Diagram 2.2 - Network TIming of Locations RESTFul Interface invocationFurther instrumentation data is available in each of our RESTFul Service Interface JSON responses that should be used when analyzing performance. This data can be seen in the Response tab. The data herein is the JSON response payload, which carries the dB query times and payload sizing for the retrieved topology as can be seen in Diagram 2.3.The two important measures are the queryTime and the totalExecTime. Both measures are in milliseconds. The represent the time it takes to query the geo enriched topology from the ITNM NCIM dB (queryTime) and the total time it takes to query the dB and prepare the JSON payload and respond to the RESTFul client (browser). This data is useful in analyzing performance ofncp_gis and should be provided to IBM Level Support when answering tickets.In some cases no topology is returned from the RESTFul interface. This is either:1.No geo enriched data is present in NCIM and the geo enrichment stitching process haseither not been run or has failed. To debug this the ITNM admin must analyze thestitching process and determine where the stitching has failed.2.The RESTFul Service has failed due to a failure in IBM JazzSm or when accessing thedB, in this case the Server side logs are useful as they contain trace level information of the CTE’s that are run. It’s possible to take these queries and manually run them against the dB with IBM Level Support assistance to diagnose the root cause of the problem.Aside from looking at the “locations” filtered queries, the other query of importance is the “connections” filtered query which is used to determine the links/edges between topologies. The same analytical process for “locations” applies to “connections”.Missing IconsSometimes a map may have links, but those links may appear to be not connected to anything, this is known as the missing class icon in the topology.The default endNode icon should be applied when a new classtype is being used in ITNM. The classtype for each topological entity is described in the JSON response of the Locations RESTFul Service. An example of that response is shown in Diagram 2.4 - ClassType of Location MarkersDiagram 2.4 - ClassType of Location MarkersThe classType of a location marker is translated to an icon within the code and is served from the list of iconography that is located within the deployed ncp_gis.war at$JAZZSM_HOME/profile/installedApps/JazzSMNode01Cell/isc.ear/ncp_gis.war/resources/com mon_assets/topology_icons/The translation process of classtype to icon name is based on toLower() function. Once the icon is mapped it is served to the browser, which can be traced using the Developer Tools -> Network tab.Customizing IconsIt is possible to remap the current icons or add new icons to the ncp_gis iconography. There are 2 simple rules to adhere to when remapping or adding a new icon for a classtype.1.The icon must be a PNG format, in 32 * 32 pixel size. For exampleresources/common_assets/topology_icons/dbfarm.png: PNG image data, 31 x 32,8-bit/color RGBA, non-interlaced2.The name of the icon must be lowercase and match the classtype of the locationtopology returned from NCIM. The process of defining a classtype for a new topological entity in NCIM is described in the IBM Knowledge Center documentation.Once an icon has been updated or added the endUser must logout, clear cookies and stored content and re login to DASh and ncp_gis to see the new icon.Customizing Right Click MenusThe right click menu system in ncp_gis is based on the same menu system for the logical maps served using the TomSawyer technology. The menu systems are served using another RESTFul interface, known as Tools. The invocation of the right click menus can also be viewed using the Developer Tools -> Network tab, using the filter “tools” as per Diagram 4.0 - Tools Service InvocationDiagram 4.0 - Tools Service InvocationTools are defined on the server side. There is a set of guidelines on IBM Knowledge Center at https:///support/knowledgecenter/en/SSSHRK_4.2.0/resolve/concept/ops_aboutco ntextmenus.html and the syntax is described athttps:///support/knowledgecenter/en/SSSHRK_4.2.0/admin/task/adm_xmlelement sfortools.htmlAn example of ncp_gis menus and tools can be seen in the base install at:/opt/IBM/netcool/gui/precision_gui/profile/etc/tnm/menus and/opt/IBM/netcool/gui/precision_gui/profile/etc/tnm/tools.Menu’s provide the id and declaration of which tools a menu will serve.●Right click on a gis device on a map or a device in the table view of a location will servethe menu in ncp_gis_device_menu.xml●Right click on a link on a map or a link entry on an aggregated link on locations will servethe menu in ncp_gis_link_menu.xmlThere is no current support for right click on an aggregated marker such as a region or a location, only on the device or links within them.To add new tools to the right click, follow the IBM Knowledge Center documentation. Customizing Maps with OverlaysWe support the overlay of custom maps. The feature is described on IBM Knowledge Center documentation at:https:///support/knowledgecenter/en/SSSHRK_4.2.0/resolve/task/ops_geocustom.htmlIn general, as long as the new layer is supported by OpenLayers 4.X and matches one of the formats, it will be renderable:●ArcGISRest●Web Map Service (WMS)●Web Mapping Tile Service (WMTS)Overlay for weather could be provided by h ttps:///help/#!section=rest-usage.A search of Google will turn up other overlays that are compatible. In general ArcGISRest overlays seem to perform best and are the most feature rich.It should be noted that providing and configuring overlays is supported as a means of integration and IBM and it’s IP partner’s Wipro are not responsible for the 3rd part overlay services functionality and/or performance.Defining specific Mapping ContextsFor more information on tailoring maps to pre-defined scopes or contexts, see the IBM Knowledge Center documentation at.https:///support/knowledgecenter/en/SSSHRK_4.2.0/resolve/reference/ops_geourl parameters.htmlThis feature is useful if a customer wishes to define very specific maps for specificdomains/views, etc. It is then possible to load that ncp_gis URL into a WebWidget in DASH to serve just that specific scoped set of geo enriched topology.。
BOSCH Divar - 软件开发套件 (SDK)(附件) 说明书

Divar 软件开发套件 (Software Development Kit, SDK) 是一套全面受支持的库、文档和样本,旨在开发基于 PC 的商业应用程序软件以便与博世 Divar 数字录像机通信并对其进行控制。
SDK 使开发人员可以创建 Divar 的智能前端。
它的功能非常强大,广泛应用于系统集成商领域以及博世自身的产品。
Divar 数字多功能录像机与结合了多用户和多 Divar 支持的 Divar 控制中心一起,可以应对大多数部署方案。
SDK 可以用来创建针对特定问题的定制解决方案。
Divar SDK 可以同时提供多个 Divar 登录和实时视频显示,使用户可以无缝跟踪连接至数字录像机的多台摄像机,因而大大提升了监控效率。
回放控制包括方向、速度、暂停、单步和时间定位,由于不需要前往数字录像机现场,因此进一步提高了效率和安全性。
SDK 允许用户搜索 Divar 记录的输入信号和移动报警,而 Smart Motion Search(智能移动搜索)功能可以远程识别主要事件和自动检索相关视频。
在销售终端 (POS) 和自动柜员机 (ATM) 应用中,本地系统通常与监控和安防系统集成。
SDK 使用户可以搜索 POS 和 ATM 文本以及相应的视频。
您可以根据名称、信用卡号码、交易类型或金额从不同的机器、分支机构、地区,甚至是多个国家来搜索长达数小时的视频,然后显示相应的视频。
使用 SDK 可以将短片导出至 AVI 文件或捕捉单个帧并保存为位图文件,以备将来使用。
越来越多的创新性定制监控解决方案嵌入由数字录像机、矩阵切换台和键盘构成且集成至周围环境的现有闭路电视光纤网络,而Divar SDK 恰恰构成了这些解决方案的核心。
附件数量部件1型号 DVRSDK1Divar SDK 用户指南1软件许可协议技术规格系统要求Pentium® II 450MHz,128MB RAM,50MB 可用磁盘空间,8MB 视频内存,以及任何下列软件:Windows 98,Millennium Edition,Windows NT® 4.0 Service Pack 6A 或更高版本Windows 2000(Service Pack 2 或更高版本)Windows XP Professional,或Windows XP Home所需的系统附件兼容型数字录像机:Divar 数字多功能录像机JavaScript® 和 Java® 是 Sun Microsystems, Inc 的注册商标。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Contributors
DIVA-GIS is maintained by Robert J. Hijmans. Edwin Rojas, Rachel O‟Brien, and Mariana Cruz have written parts of the code for previous versions. DIVA-GIS was improved thanks to bug-reports and/or suggestions made by many individuals, particularly Luigi Guarino, Prem Mathur, Xavier Scheldeman, and others including Østein Berg, Israel Barrantes, Rachel O‟Brien, Coen Bussink, Arthur Chapman, Dirk Enneking, Catherine Graham, Dave Hodson, Andrew Jarvis, Maarten van Zonneveld were also involved in the development of earlier versions. Support for the early development has come from the Bioversity International, the UC Berkeley Museum of Vertebrate Zoology, the International Potato Center (CIP), SINGER/SGRP, FAO, and USDA. We have benefited from the work of the following persons: M. Sawada (Rook's case), Gerald Everden and Frank Warmerdam (PROJ4); Andrew Williamson (Shapechk); the contributors to Delphi Zip Version 1.70 (/SiliconValley/Network/2114/)
3.
3.1 3.2 3.3 3.4 3.5 3.6 3.7 3.8 3.9 3.10 3.11 3.12 3.13 3.14 3.15
THE DATA MENU ...................................................... 13
Abstract
DIVA-GIS is a free computer program for mapping and analyzing spatial data. It is particularly useful for analyzing the distribution of organisms to elucidate geographic and ecological patterns. It is aimed at those who cannot afford generic commercial geographic information system (GIS) software, or do not have the time to learn how to use these often complicated programs, and for anyone else who wants a GIS tailormade to analyze biological distributions. DIVA-GIS supports vector (point, line, polygon), image and grid data types. It can help improve data quality by finding the coordinates of localities using gazetteers, and by checking existing coordinates using overlays (spatial queries) of the collection sites with administrative boundary databases. Distribution maps can then be made. Analytical functions in DIVA-GIS include mapping of richness and diversity (including based on molecular marker (DNA) data; mapping the distribution of specific traits; identifying areas with complementary diversity; and calculating spatial autocorrelation. DIVA-GIS can also extract climate data for all locations on land. Ecological niche modeling can be carried out using the BIOCLIM and DOMAIN algorithms.
ii
Warning
DIVA-GIS is a relatively new program that is under continuous development and not all parts have been tested completely. This means that you should never blindly believe the results of your analysis. Rather, you should always test if DIVA-GIS works well, for example by manually calculating the expected results for a small number of grid cells, or by first doing the calculations with a simple sample data set for which you know the results. If you find a possible error, please be so kind as to report it! Please send your comments to info@.
1.3.1 1.3.2 1.4.1 1.4.2 1.4.3 1.4.4 The Data view ........................................................................2 The Design view ......................................................................5 Shapefiles .............................................................................8 Gridfiles ...............................................................................8 Image files ............................................................................9 DBF files ..................................................................ormats ........................................................ 7
1.5
Geographic coordinates ...................................................... 10
2.
2.1 2.2
THE PROJECT MENU ................................................... 11
Projects ......................................................................... 11 Import project and Export project ......................................... 12
DIVA-GIS
Version 7.5
Manual
January 2012
Robert J. Hijmans, Luigi Guarino, and Prem Mathur
Conditions of use
The DIVA-GIS software can be used and distributed freely. It is provided "as is", without warranty of any kind, express or implied, including but not limited to the warranties of merchantability, fitness for a particular purpose and noninfringement. In no event shall the authors or copyright holders be liable for any claim, damages or other liability, whether in an action of contract, tort or otherwise, arising from, out of or in connection with the software or the use or other dealings in the software. Portions of this computer program are owned by LizardTech, Inc., and are copyright © 1995-1998, LizardTech, Inc., and/or the University of California. U.S. Patent No. 5,710,835. All rights reserved.