Kalman filter
卡尔曼滤波通俗理解

卡尔曼滤波通俗理解
卡尔曼滤波通俗理解
卡尔曼滤波(Kalman Filter)是一种用来估计系统状态的算法。
它是一种有效的滤波算法,被用于许多模式拟合场合,如智能位置跟踪或自动控制系统。
卡尔曼滤波的核心思想是,通过先验概率分布来估计状态,而这种先验概率分布是基于观察到的测量值,以及我们对变化过程的知识,形成的。
也就是说,卡尔曼滤波给出了一种融合当前观测值和之前观测值的知识技术,用之来估计状态变量,而不仅仅是根据当前观测值来估计。
它的工作原理是,从先前状态估计,然后反馈新观测的量,根据测量值更新估计状态。
这样就可以得到一个更准确的估计。
简而言之,卡尔曼滤波使得我们可以使用当前测量值和先前观测值的组合,以估计一个可能的状态,而不仅仅是根据当前测量值来估计。
这就是卡尔曼滤波的优势所在。
估计 kalman filter model 参数 -回复
估计kalman filter model 参数-回复估计Kalman Filter Model参数一、引言卡尔曼滤波器(Kalman Filter)是一种用于预测和估计系统状态的强大数学工具。
它使用递归贝叶斯估计的方法,结合系统模型和观测数据,以更新和调整状态的估计。
在估计Kalman Filter Model的参数时,我们需要了解该模型的原理、参数的含义以及如何使用已有的数据进行参数估计。
二、Kalman Filter模型的原理Kalman Filter通过组合系统模型和观测数据来估计系统的状态。
它假设系统可以用线性动态系统模型和线性观测模型来描述。
Kalman Filter 的核心是递归贝叶斯估计,即通过更新先验概率得到后验概率,从而实现状态估计的迭代更新过程。
Kalman Filter模型的核心方程包括状态预测方程和状态更新方程。
状态预测方程用于根据先验信息预测系统的状态,而状态更新方程用于根据观测数据修正状态的估计。
状态预测方程和状态更新方程之间通过卡尔曼增益(Kalman Gain)进行连接。
三、Kalman Filter模型的参数在估计Kalman Filter模型的参数时,我们主要需要确定以下几个参数:1. 系统状态转移矩阵(State Transition Matrix):描述系统的状态如何从一个时刻传递到下一个时刻,通常表示为Φ。
2. 控制矩阵(Control Matrix):描述外部控制输入对系统状态的影响,通常表示为B。
3. 系统过程噪声协方差矩阵(Process Noise Covariance Matrix):描述系统在状态传递过程中的不确定性,通常表示为Q。
4. 观测矩阵(Observation Matrix):描述系统的状态如何被观测到,通常表示为H。
5. 观测噪声协方差矩阵(Measurement Noise Covariance Matrix):描述观测数据的噪声特性,通常表示为R。
卡尔曼滤波c语言实现

卡尔曼滤波c语言实现
卡尔曼滤波(Kalman filter)是一种著名的非线性估计方法,它由美国工程师R.E.KALMAN于1960年提出。
卡尔曼滤波基本思想是将系统状态采用隐马尔可夫模型来描述,将系统状态的不确定性表示为有限的概率分布,由此建立一个状态估计问题。
c语言实现卡尔曼滤波的步骤如下:
1、初始化:设置初始条件,包括状态变量x的初始值和协方差矩阵P的初始值。
2、预测:根据当前的状态变量x估计下一时刻的状态变量x_prediction。
3、更新:根据观测值z和预测状态变量
x_prediction更新当前状态变量x_update。
4、循环:重复以上步骤,直到达到目标精度或者停止条件。
卡尔曼滤波代码实现c++

卡尔曼滤波代码实现c++卡尔曼滤波(Kalman Filter)是一种用于估计线性系统状态的算法。
下面是一个简单的卡尔曼滤波代码实现示例,使用 C++编写:```cpp#include <iostream>#include <vector>class KalmanFilter {public:// 初始化卡尔曼滤波器KalmanFilter(double initial_state, double initial_error_variance, double process_variance) {S = initial_error_variance;X = initial_state;P = initial_error_variance;}// 预测下一时刻的状态void predict(double measurement) {X = X + measurement;P = P + process_variance;}// 修正当前时刻的状态void correct(double measurement) {S = S + P;K = P / S;X = X + K * (measurement - X);P = (1 - K) * P;}private:double X; // 当前时刻的状态估计double P; // 状态估计的误差协方差double S; // 测量噪声的协方差double K; // 卡尔曼增益double process_variance; // 过程噪声的方差};int main() {// 初始状态和误差协方差double initial_state = 0.0;double initial_error_variance = 1.0;double process_variance = 0.1;// 创建卡尔曼滤波器对象KalmanFilter filter(initial_state, initial_error_variance, process_variance);// 进行状态预测和修正std::vector<double> measurements = {1.0, 2.0, 3.0};for (double measurement : measurements) {filter.predict(measurement);filter.correct(measurement);std::cout << "当前状态估计: " << filter.X << std::endl;}return 0;}```上述代码实现了一个简单的卡尔曼滤波器,用于对线性系统的状态进行估计。
【译】图解卡尔曼滤波(KalmanFilter)

【译】图解卡尔曼滤波(KalmanFilter)译者注:这恐怕是全网有关卡尔曼滤波最简单易懂的解释,如果你认真的读完本文,你将对卡尔曼滤波有一个更加清晰的认识,并且可以手推卡尔曼滤波。
原文作者使用了漂亮的图片和颜色来阐明它的原理(读起来并不会因公式多而感到枯燥),所以请勇敢地读下去!本人翻译水平有限,如有疑问,请阅读原文;如有错误,请在评论区指出。
推荐阅读原文,排版比较美:)背景关于滤波首先援引来自知乎大神的解释。
“一位专业课的教授给我们上课的时候,曾谈到:filtering is weighting(滤波即加权)。
滤波的作用就是给不同的信号分量不同的权重。
最简单的loss pass filter,就是直接把低频的信号给1权重,而给高频部分0权重。
对于更复杂的滤波,比如维纳滤波, 则要根据信号的统计知识来设计权重。
从统计信号处理的角度,降噪可以看成滤波的一种。
降噪的目的在于突出信号本身而抑制噪声影响。
从这个角度,降噪就是给信号一个高的权重而给噪声一个低的权重。
维纳滤波就是一个典型的降噪滤波器。
”关于卡尔曼滤波Kalman Filter 算法,是一种递推预测滤波算法,算法中涉及到滤波,也涉及到对下一时刻数据的预测。
Kalman Filter 由一系列递归数学公式描述。
它提供了一种高效可计算的方法来估计过程的状态,并使估计均方误差最小。
卡尔曼滤波器应用广泛且功能强大:它可以估计信号的过去和当前状态,甚至能估计将来的状态,即使并不知道模型的确切性质。
Kalman Filter 也可以被认为是一种数据融合算法(Data fusion algorithm),已有50多年的历史,是当今使用最重要和最常见的数据融合算法之一。
Kalman Filter 的巨大成功归功于其小的计算需求,优雅的递归属性以及作为具有高斯误差统计的一维线性系统的最优估计器的状态。
Kalman Filter 只能减小均值为0的测量噪声带来的影响。
卡尔曼滤波器的五个公式
卡尔曼滤波器的五个公式
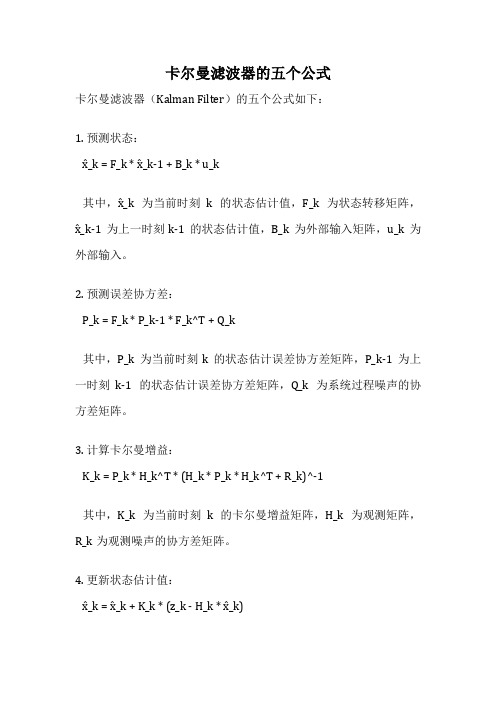
卡尔曼滤波器(Kalman Filter)的五个公式如下:
1. 预测状态:
x̂_k = F_k * x̂_k-1 + B_k * u_k
其中,x̂_k为当前时刻k的状态估计值,F_k为状态转移矩阵,x̂_k-1为上一时刻k-1的状态估计值,B_k为外部输入矩阵,u_k为外部输入。
2. 预测误差协方差:
P_k = F_k * P_k-1 * F_k^T + Q_k
其中,P_k为当前时刻k的状态估计误差协方差矩阵,P_k-1为上一时刻k-1的状态估计误差协方差矩阵,Q_k为系统过程噪声的协方差矩阵。
3. 计算卡尔曼增益:
K_k = P_k * H_k^T * (H_k * P_k * H_k^T + R_k)^-1
其中,K_k为当前时刻k的卡尔曼增益矩阵,H_k为观测矩阵,R_k为观测噪声的协方差矩阵。
4. 更新状态估计值:
x̂_k = x̂_k + K_k * (z_k - H_k * x̂_k)
其中,z_k为当前时刻k的观测值。
5. 更新状态估计误差协方差:
P_k = (I - K_k * H_k) * P_k
其中,I为单位矩阵。
卡尔曼滤波Kalman filter

卡尔曼滤波器– Kalman Filter1.什么是卡尔曼滤波器(What is the Kalman Filter )在学习卡尔曼滤波器之前,首先看看为什么叫“卡尔曼”。
跟其他著名的理论(例如傅立叶变换,泰勒级数等等)一样,卡尔曼也是一个人的名字,而跟他们不同的是,他是个现代人!卡尔曼全名Rudolf Emil Kalman,匈牙利数学家,1930年出生于匈牙利首都布达佩斯。
1953,1954年于麻省理工学院分别获得电机工程学士及硕士学位。
1957年于哥伦比亚大学获得博士学位。
我们现在要学习的卡尔曼滤波器,正是源于他的博士论文和1960年发表的论文《A New Approach to Linear Filtering and Prediction Problems》(线性滤波与预测问题的新方法)。
如果对这编论文有兴趣,可以到这里的地址下载:/~welch/media/pdf/Kalman1960.pdf。
简单来说,卡尔曼滤波器是一个“optimal recursive data processing algorithm(最优化自回归数据处理算法)”。
对于解决很大部分的问题,他是最优,效率最高甚至是最有用的。
他的广泛应用已经超过30年,包括机器人导航,控制,传感器数据融合甚至在军事方面的雷达系统以及导弹追踪等等。
近年来更被应用于计算机图像处理,例如头脸识别,图像分割,图像边缘检测等等。
2.卡尔曼滤波器的介绍(Introduction to the Kalman Filter)为了可以更加容易的理解卡尔曼滤波器,这里会应用形象的描述方法来讲解,而不是像大多数参考书那样罗列一大堆的数学公式和数学符号。
但是,他的5条公式是其核心内容。
结合现代的计算机,其实卡尔曼的程序相当的简单,只要你理解了他的那5条公式。
在介绍他的5条公式之前,先让我们来根据下面的例子一步一步的探索。
假设我们要研究的对象是一个房间的温度。
卡尔曼滤波原理

卡尔曼滤波原理卡尔曼滤波(Kalman Filtering)是一种用于估计、预测和控制的最优滤波方法,由美国籍匈牙利裔数学家卡尔曼(Rudolf E. Kalman)在1960年提出。
卡尔曼滤波是一种递归滤波算法,通过对测量数据和系统模型的融合,可以得到更准确、更可靠的估计结果。
在各种应用领域,如导航、机器人、航空航天、金融等,卡尔曼滤波都被广泛应用。
1. 卡尔曼滤波的基本原理卡尔曼滤波的基本原理是基于状态空间模型,将系统的状态用随机变量来表示。
它假设系统的状态满足线性高斯模型,并通过线性动态方程和线性测量方程描述系统的演化过程和测量过程。
具体而言,卡尔曼滤波算法基于以下两个基本步骤进行:1.1 预测步骤:通过系统的动态方程预测当前时刻的状态,并计算预测的状态协方差矩阵。
预测步骤主要是利用前一时刻的状态和控制输入来预测当前时刻的状态。
1.2 更新步骤:通过系统的测量方程,将预测的状态与实际测量值进行融合,得到最优估计的状态和状态协方差矩阵。
更新步骤主要是利用当前时刻的测量值来修正预测的状态。
通过不断迭代进行预测和更新,可以得到连续时间上的状态估计值,并获得最优的估计结果。
2. 卡尔曼滤波的优势卡尔曼滤波具有以下几个优势:2.1 适用于线性系统与高斯噪声:卡尔曼滤波是一种基于线性高斯模型的滤波方法,对于满足这些条件的系统,卡尔曼滤波能够给出最优的估计结果。
2.2 递归计算:卡尔曼滤波是一种递归滤波算法,可以在每个时刻根据当前的测量值和先前的估计结果进行迭代计算,不需要保存过多的历史数据。
2.3 最优性:卡尔曼滤波可以通过最小均方误差准则,给出能够最优估计系统状态的解。
2.4 实时性:由于卡尔曼滤波的递归计算特性,它可以实时地处理数据,并及时根据新的测量值进行估计。
3. 卡尔曼滤波的应用卡尔曼滤波在多个领域都有广泛的应用,以下是一些典型的应用例子:3.1 导航系统:卡尔曼滤波可以用于导航系统中的位置和速度估计,可以结合地面测量值和惯性测量传感器的数据,提供精确的导航信息。
卡尔曼滤波

卡尔曼滤波卡尔曼滤波(Kalman filtering ) 一种利用线性系统状态方程,通过系统输入输出观测数据,对系统状态进行最优估计的算法。
由于观测数据中包括系统中的噪声和干扰的影响,所以最优估计也可看作是滤波过程。
斯坦利施密特(Stanley Schmidt)首次实现了卡尔曼滤波器。
卡尔曼在NASA埃姆斯研究中心访问时,发现他的方法对于解决阿波罗计划的轨道预测很有用,后来阿波罗飞船的导航电脑使用了这种滤波器。
关于这种滤波器的论文由Swerli ng (1958), Kalman (I960) 与Kalma n and Bucy (1961) 发表。
数据滤波是去除噪声还原真实数据的一种数据处理技术,Kalman滤波在测量方差已知的情况下能够从一系列存在测量噪声的数据中,估计动态系统的状态•由于,它便于计算机编程实现,并能够对现场采集的数据进行实时的更新和处理,Kalman滤波是目前应用最为广泛的滤波方法,在通信,导航,制导与控制等多领域得到了较好的应用•中文名卡尔曼滤波器,Kalman滤波,卡曼滤波外文名KALMAN FILTER表达式X(k)=A X(k-1)+B U(k)+W(k)提岀者斯坦利施密特提岀时间1958应用学科天文,宇航,气象适用领域范围雷达跟踪去噪声适用领域范围控制、制导、导航、通讯等现代工程斯坦利施密特(Stanley Schmidt)首次实现了卡尔曼滤波器。
卡尔曼在NASA埃姆斯研究中心访问时,发现他的方法对于解决阿波罗计划的轨道预测很有用,后来阿波罗飞船的导—航电脑使用了这种滤波器。
关于这种滤波器的论文由Swerling (1958), Kalman (1960)与Kalma n and Bucy (1961) 发表。
2定义传统的滤波方法,只能是在有用信号与噪声具有不同频带的条件下才能实现. 20世纪40年代,N .维纳和A. H .柯尔莫哥罗夫把信号和噪声的统计性质引进了滤波理论,在假设信号和噪声都是平稳过程的条件下,利用最优化方法对信号真值进行估计,达到滤波目的,从而在概念上与传统的滤波方法联系起来,被称为维纳滤波。
kalman filter 的英文术语
kalman filter 的英文术语Kalman Filter(卡尔曼滤波器)是一种高效且递归的滤波器,用于估计线性动态系统的状态。
该算法由匈牙利数学家Rudolf Kalman于20世纪60年代提出,并已广泛应用于航空航天、无人驾驶、金融预测、机器人技术、传感器融合、计算机视觉等众多领域。
Key Terms and Concepts of Kalman Filter:State Estimation: The process of determining the most likely state of a system based on a set of observations. In Kalman Filter, this is achieved by combining the system's predicted state with the actual measurements.System Model: A mathematical representation of the system's behavior. It typically consists of a state equation and an observation equation. The state equation describes how the state evolves over time, while the observation equation defines how the state is related to the measurements.State Variables: The internal variables that describe the system's state at any given time. These variables are estimated using the Kalman Filter.Process Noise: Uncertainty in the system model that cannot be explained by the measurements. It represents the noise or uncertainty in the system's dynamics.Measurement Noise: Uncertainty in the measurements caused by various factors such as sensor errors, environmental disturbances, etc.Covariance Matrix: A matrix that quantifies the uncertainty associated with the estimated state variables. It is used to track the uncertainty and adjust the filter's estimates accordingly.Prediction Step: The process of estimating the system's state at the next time step based on the current state and the system model. This step involves applying the state equation to predict the next state and updating the covariance matrix.Update Step: The process of correcting the predicted state based on the actual measurements. This step involves calculating the Kalman gain, which determines how much to trust the measurements relative to the predictions, and then updating the state estimate and covariance matrix accordingly.The Kalman Filter algorithm iterates between these prediction and update steps, continuously improving the state estimation as new measurements become available. Its recursive nature allows it to process data in real-time, making it an ideal choice for many real-world applications.。
卡尔曼滤波与粒子滤波

卡尔曼滤波器的不足之处
• 滤波限制条件比较苛刻,它要求系统模型精确以及系统误差模型和观 测误差模型已知,这在实际应用中是很难满足的,或者在系统工作过 程中,模型发生变化,这些都导致传统KF的滤波发散或精度下降。
• 计算机字长的限制,这种情况可能导致计算过程中出现舍入误差,从 而导致方差阵P ( k | k)不对称引起滤波发散。
其中I 为1的矩阵,对于单模型单测量,I=1。当系统进入k+1状态时, P(k|k)就是式子(2)的P(k-1|k-1)。这样,算法就可以自回归的运算下 去。
卡尔曼滤波器的介绍
• 例子理解这5条公式。 • 假设我们要研究的对象是一个房间的温度。根据你的经验判断,这
个房间的温度是恒定的,也就是下一分钟的温度等于现在这一分钟 的温度(假设我们用一分钟来做时间单位)。假设你对你的经验不 是100%的相信,可能会有上下偏差几度。我们把这些偏差看成是 高斯白噪声(White Gaussian Noise),也就是这些偏差跟前后 时间是没有关系的而且符合高斯分配(Gaussian Distribution)。 另外,我们在房间里放一个温度计,但是这个温度计也不准确的, 测量值会比实际值偏差。我们也把这些偏差看成是高斯白噪声。 好了,现在对于某一分钟我们有两个有关于该房间的温度值:你根 据经验的预测值(系统的预测值)和温度计的值(测量值)。下面 我们要用这两个值结合他们各自的噪声来估算出房间的实际温度值。
• 我们先要引入一个离散控制过程的系统。该系统可用一个线性随机微分 方程(Linear Stochastic Difference equation)来描述:
X(k)=A X(k-1)+B U(k)+W(k) 再加上系统的测量值:
Z(k)=H X(k)+V(k)
序贯kf滤波

序贯kf滤波序贯Kalman滤波(Sequential Kalman Filter)是一种基于递归的滤波算法,用于估计动态系统的状态。
它通过对系统的测量值和模型进行融合,提供对系统状态的最优估计。
在本文中,我们将详细介绍序贯Kalman滤波的原理和应用。
一、序贯Kalman滤波的原理序贯Kalman滤波是一种递归滤波算法,它通过逐步处理测量值和模型,不断更新状态估计。
其基本原理可以概括为以下步骤:1. 初始化:根据系统的初始状态和协方差矩阵,初始化状态估计和协方差矩阵。
2. 预测(Prediction):利用系统的动态模型,根据上一时刻的状态估计预测当前时刻的状态。
3. 更新(Update):利用当前时刻的测量值,根据测量模型对状态估计进行修正。
4. 递归迭代:重复进行预测和更新步骤,直到滤波结束。
在预测步骤中,通过系统的动态模型和上一时刻的状态估计,可以预测当前时刻的状态。
预测的结果包括状态的均值和协方差矩阵,用于描述状态的不确定性。
在更新步骤中,通过当前时刻的测量值和测量模型,可以对状态的预测进行修正,得到更精确的状态估计。
二、序贯Kalman滤波的应用序贯Kalman滤波广泛应用于各种领域,特别是在机器人导航、目标跟踪、信号处理等领域。
以下是一些典型的应用案例:1. 机器人导航:在自主导航中,机器人需要通过传感器获取环境信息,并根据这些信息进行位置估计。
序贯Kalman滤波可以融合传感器测量和运动模型,提供对机器人位置的准确估计。
2. 目标跟踪:在目标跟踪中,需要通过传感器获取目标的位置和速度信息。
序贯Kalman滤波可以对目标状态进行实时估计,从而实现目标的准确跟踪。
3. 信号处理:在信号处理中,序贯Kalman滤波可以用于滤波和预测。
通过对信号进行滤波,可以去除噪声和干扰,提取信号的有效信息;通过对信号进行预测,可以对未来的信号进行估计和预测。
三、序贯Kalman滤波的优势和局限性序贯Kalman滤波具有以下优势:1. 递归计算:序贯Kalman滤波是一种递归滤波算法,可以实时更新状态估计,适用于实时应用。
卡尔曼滤波方程

卡尔曼滤波方程卡尔曼滤波(Kalman filter)是一种最广泛用于处理含有测量噪声的信号的一种称为预测-建议-更新的滤波技术。
卡尔曼滤波的发明者是1960年代的科学家Rudolf Kalman。
1.什么是卡尔曼滤波卡尔曼滤波是一种统计滤波技术,用于跟踪和预测某些系统中变动数据的状态序列,该系统受到波动的测量噪声和其他随机模糊因素(如手动操作)的影响。
其基本原理是,使用现有信息(特别是采集来自传感器测量的实时数据)来更新某些观测到的状态信息,并根据系统模型对该状态信息进行预测。
2. 卡尔曼滤波的应用卡尔曼滤波的应用非常广泛,在控制、机器视觉、导航和轨迹跟踪、状态估计,等等。
该方法还可用于图像处理、金融时间序列预测、空间监测、可视化和数据挖掘等领域。
在实践中,该技术可以有效地减少测量误差和随机误差,提高信号处理的准确性。
3. Kalman Filter的方程——预测、更新和建议卡尔曼滤波的运行分为三个部分:预测、更新和建议。
所有三个部分组成了卡尔曼滤波这个方程。
(1)预测:首先,根据时间更新,在上一时刻的状态和控制输入,使用运动模型来预测当前时刻的状态。
(2)更新:然后,将采集到的测量值,和模型预测出的状态进行比较,并做出修正,以调整模型预测的状态预测值。
(3)建议:最终,将采集到的测量值和更新后的状态预测值结合起来,得出最终的状态估计值。
4. 结论卡尔曼滤波是运用统计技术对信号的一种有效的处理方法,可以有效的减少测量误差和随机误差,提高滤波的准确性,给信号处理带来极大的便利。
它的应用非常广泛,已经被广泛的应用到实时控制、机器视觉、导航和轨迹跟踪、状态估计等领域中。
未来卡尔曼滤波逐步得到发展,对能给信号处理提供更多的便利服务,起到增强信号处理准确度,降低误差,极大的改善信号处理效果。
kalman filter 卡尔曼滤波调参的实用方法和经验
kalman filter 卡尔曼滤波调参的实用方法和经验
卡尔曼滤波是一种广泛用于估计和预测线性动态系统状态的有效方法。
调参是使用卡尔曼滤波的关键步骤之一,以下是一些实用的方法和经验:
1. 理解系统:在开始调参之前,需要深入理解所处理问题的性质和动态系统的特性。
这包括确定系统的状态变量、输入和测量噪声的特性等。
2. 选择合适的模型:卡尔曼滤波需要一个线性动态系统模型。
如果系统是非线性的,需要使用扩展卡尔曼滤波或者其他非线性滤波方法。
3. 初始参数选择:初始参数包括初始状态估计、初始状态协方差矩阵、初始测量协方差矩阵和初始过程噪声协方差矩阵。
这些参数可以根据先验知识和问题的特性进行选择,也可以通过实验数据进行初步估计。
4. 实验和验证:在实际应用中,需要对卡尔曼滤波进行实验和验证,以确定参数的最优值。
这可以通过对比卡尔曼滤波的结果和实际测量数据进行调整。
5. 动态调整:在实际应用中,如果系统状态的变化是动态的,需要动态调整卡尔曼滤波的参数。
例如,在无人机导航中,位置和速度的估计会随着时间的推移而不断变化,需要根据实际情况调整滤波参数。
6. 调参工具:可以使用一些工具来辅助调参,例如Matlab或Python中的卡尔曼滤波库,这些库提供了各种参数调整的功能,可以方便地进行实验和验证。
7. 不断尝试和改进:调参是一个试错的过程,需要通过不断的尝试和改进来确定最优的参数值。
在某些情况下,可能需要结合经验和理论来调整参数。
总之,卡尔曼滤波的调参需要综合考虑理论、经验和实验验证。
通过深入理解系统、合理选择模型和初始参数、进行实验和动态调整,可以获得更好的估计效果。
卡尔曼滤波python代码

卡尔曼滤波(Kalman Filter)的原理与应用1. 什么是卡尔曼滤波?卡尔曼滤波是一种用于估计系统状态的数学算法,常用于信号处理、控制系统和机器人等领域。
它是一种递归滤波器,能够根据观测数据和系统动态模型,对系统状态进行最优估计。
卡尔曼滤波器以数学统计的方法来处理不完全和有噪声的观测数据,通过结合先验信息和测量信息,得到对系统状态的最优估计。
它的主要思想是将系统状态表示为高斯分布,并通过线性动态模型和线性观测模型来更新状态的估计。
2. 卡尔曼滤波的基本原理卡尔曼滤波的基本原理可以分为两个步骤:预测和更新。
2.1 预测(Prediction)在预测步骤中,卡尔曼滤波器使用系统的动态模型来预测系统的状态。
假设系统的状态由向量x表示,状态转移矩阵为F,控制输入为向量u,过程噪声为向量w,则预测步骤可以表示为:x' = F * x + uP' = F * P * F^T + Q其中,x’为预测的状态估计,P’为预测的状态协方差,Q为过程噪声的协方差矩阵。
2.2 更新(Update)在更新步骤中,卡尔曼滤波器使用观测数据来修正预测的状态估计。
假设观测数据由向量z表示,观测模型为H,测量噪声为向量v,则更新步骤可以表示为:y = z - H * x'S = H * P' * H^T + RK = P' * H^T * S^(-1)x = x' + K * yP = (I - K * H) * P'其中,y为残差(观测数据与预测值之间的差异),S为残差的协方差矩阵,K为卡尔曼增益,x为更新后的状态估计,P为更新后的状态协方差,R为测量噪声的协方差矩阵。
3. 卡尔曼滤波的应用卡尔曼滤波在众多领域中都有广泛的应用,以下是几个常见的应用场景:3.1 航空航天卡尔曼滤波在航空航天领域中被广泛应用于飞行器的导航和自主飞行控制。
通过融合惯性测量单元(IMU)和全球定位系统(GPS)的数据,卡尔曼滤波器能够提供高精度的飞行器位置和姿态估计。
卡尔曼滤波(Kalman Filter)原理与公式推导

一、背景---卡尔曼滤波的意义随着传感技术、机器人、自动驾驶以及航空航天等技术的不断发展,对控制系统的精度及稳定性的要求也越来越高。
卡尔曼滤波作为一种状态最优估计的方法,其应用也越来越普遍,如在无人机、机器人等领域均得到了广泛应用。
对于Kalman Filter的理解,用过的都知道“黄金五条”公式,且通过“预测”与“更新”两个过程来对系统的状态进行最优估计,但完整的推导过程却不一定能写出来,希望通过此文能对卡尔曼滤波的原理及状态估计算法有更一步的理解。
二、卡尔曼滤波的基本模型假设一离散线性动态系统的模型如下所示:x_{k} = A*x_{k-1} + B*u_{k} + w_{k-1}-------(1)z_{k} = H*x_{k} + v_{k} --------------------(2)其中,各变量表征的意义为:———————————————————————————x_{k}\Rightarrow 系统状态矩阵,-------, z_{k}\Rightarrow 状态阵的观测量(实测)A\Rightarrow 状态转移矩阵,-------, B\Rightarrow 控制输入矩阵H\Rightarrow 状态观测矩阵w_{k-1}\Rightarrow 过程噪声,-------,v_{k}\Rightarrow 测量噪声———————————————————————————如果大家学过《现代控制理论》的话,对上述模型的描述形式一定不会陌生,只是多了变量 w_{k-1} 与 v_{k} 。
其中,随机变量w_{k-1} 代表过程噪声(process noise), v_{k} 代表测量噪声(measurement noise),且为高斯白噪声,协方差分别为 Q 和 R ,即 p(w) \in N(0,Q) , p(v) \in N(0,R) 。
为什么要引入这两个变量呢?对于大多数实际的控制系统(如倒立摆系统)而言,它并不是一个严格的线性时变系统(Linear Time System),亦或系统结构参数的不确定性,导致估计的状态值x_{k} 存在偏差,而这个偏差值由过程噪声 w_{k} 来表征。
kalman filter原理

kalman filter原理The Kalman filter is a mathematical algorithm used to estimate and predict the state of a dynamic system. It was developed by Rudolf E. Kálmán in 1960 and has since become a widely used tool in various fields such as engineering, finance, and geophysics. The Kalman filter is especially useful in applications where noisy measurements and uncertain dynamics are present, as it provides a way to combine information from multiple sources to obtain a more accurate estimate of the system's state.Kalman filter是一种用于估计和预测动态系统状态的数学算法。
它是由Rudolf E. Kálmán在1960年开发的,并且已经成为工程、金融和地球物理学等各个领域中广泛使用的工具。
Kalman filter在存在噪声测量和不确定动力学的应用中特别有用,因为它提供了一种将多个信息源结合起来以获得更准确状态估计的方法。
One of the key concepts in the Kalman filter is the idea of state estimation. This involves making use of a system model and a series of measurements to compute the best estimate of the system's state at any given time. The filter operates recursively, meaning that itcontinuously updates its estimate as new measurements are acquired. By taking into account the uncertainties in both the system model and the measurements, the Kalman filter is able to provide an optimal state estimate that minimizes the overall estimation error.Kalman filter中一个关键的概念是状态估计的思想。
卡尔曼滤波 原理
卡尔曼滤波原理卡尔曼滤波(Kalman filtering)是一种用于估计系统状态的方法,其主要用途是在具有不确定性的模型和传感器数据下,通过利用已知的历史数据进行状态估计和预测。
它是由1950年代初期美国空军工程师鲁道夫·卡尔曼(Rudolf Kalman)开发的,至今仍广泛应用于航空航天、导航、自动控制等领域。
卡尔曼滤波的原理是基于统计学的概率推理理论,其根本思想是结合系统模型与测量数据,通过预测和更新的方式,不断地迭代优化系统状态的估计值。
卡尔曼滤波主要包括两个阶段:预测和更新。
在预测阶段,利用系统模型和估计值推算下一时刻的状态和误差协方差矩阵。
这一过程主要包含两个步骤:状态预测和误差预测。
状态预测通过计算系统模型的状态转移矩阵和估计值得出下一时刻的状态预测值。
误差预测则是通过计算系统模型的状态转移矩阵、控制矩阵和估计值的误差协方差矩阵,得出下一时刻的误差协方差预测矩阵。
在更新阶段,利用系统模型和测量数据对预测值进行修正,以得到更加准确的状态估计。
这一过程也包含两个步骤:卡尔曼增益计算和状态估计修正。
卡尔曼增益计算主要是利用误差协方差矩阵和测量协方差矩阵计算卡尔曼增益,该增益反映了系统模型与测量数据的相对重要性。
状态估计修正则是通过卡尔曼增益对预测值进行修正。
最终,通过不断迭代预测和更新过程,可以得到系统状态的最优估计值。
需要注意的是,卡尔曼滤波的应用需要具备一定的前提条件,例如:系统模型需要满足线性动态系统的假设;误差是高斯分布的,且误差协方差矩阵与测量时间无关;系统是稳定的,即状态转移矩阵具有绝对可积的特性等。
此外,卡尔曼滤波也有其局限性,例如:对非线性系统需要考虑使用扩展卡尔曼滤波等更高级别的滤波算法。
总之,卡尔曼滤波是一种重要的状态估计方法,具有广泛的应用前景。
通过结合系统模型和测量数据,它可以优化系统状态估计,提高控制精度,提高机器人导航和满足更多智能系统的需求。
卡尔曼滤波 数学基

卡尔曼滤波(Kalman Filter)是一种强大的数学工具,它是一种线性二次调节器,可以用于估计状态变量。
其基本思想是:通过系统输入输出数据,对系统状态进行估计。
卡尔曼滤波算法可以分为两个部分:预测部分和更新部分。
在预测部分,算法根据上一时刻的状态变量和系统的输入,对当前时刻的状态进行预测。
具体来说,算法通过一个状态转移矩阵和一个输入矩阵,将上一时刻的状态变量和当前时刻的输入转化为当前时刻的预测状态变量。
在更新部分,算法将实际观测值与预测值进行比较,然后通过一个卡尔曼增益矩阵对预测值进行修正,得到当前时刻的最优估计值。
卡尔曼滤波算法需要满足以下假设:
1. 系统是线性的;
2. 系统的噪声是高斯分布的;
3. 初始状态变量是已知的。
在实现卡尔曼滤波时,需要定义状态转移矩阵、输入矩阵、观测矩阵和卡尔曼增益矩阵。
这些矩阵需要根据系统的具体情况进行定义和调整。
总的来说,卡尔曼滤波是一种基于数学模型的算法,它通过对系统输入输出数据的分析,实现对系统状态的估计。
它是控制理论中非常重要的工具之一,被广泛应用于各种实际应用领域,如航空航天、机器人、金融预测等。
opencv 4 中的kalmanfilter 跟踪方法

opencv 4 中的kalmanfilter 跟踪方法Kalman Filter(卡尔曼滤波器)是一种用于估计系统状态的递归算法,它在目标跟踪领域中得到广泛应用。
在OpenCV 4中,Kalman Filter 提供了一个用于目标跟踪的实用类。
下面是关于在OpenCV 4中使用Kalman Filter进行目标跟踪的一般步骤:1. 安装OpenCV:首先,确保你的Python环境中已经安装了OpenCV 4。
你可以使用以下命令安装:pip install opencv-python2. 导入相关库:import cv2import numpy as np3. 初始化Kalman Filter:kf =cv2.KalmanFilter(dim_x=4, dim_z=2)这里,dim_x 表示状态向量的维度,dim_z 表示观测向量的维度。
在这个例子中,我们假设目标的状态包括位置(x,y)和速度(vx,vy),因此dim_x 设置为4,观测向量维度为2(我们只能通过观测到目标的位置)。
4. 设置状态转移矩阵和观测矩阵:kf.transitionMatrix =np.array([[1, 0, 1, 0],[0, 1, 0, 1],[0, 0, 1, 0],[0, 0, 0, 1]], dtype=np.float32)kf.measurementMatrix =np.array([[1, 0, 0, 0],[0, 1, 0, 0]], dtype=np.float3 2)5. 设置过程噪声协方差和测量噪声协方差:kf.processNoiseCov =1e-4*np.eye(4, dtype=np.float32)kf.measurementNoiseCov =1e-1*np.eye(2, dtype=np.float32)6. 初始化目标状态:kf.statePost =np.array([[0], [0], [0], [0]], dtype=np.float32)7. 读取视频或摄像头流:cap =cv2.VideoCapture('your_video.mp4')8. 开始跟踪:while True:ret, frame =cap.read()if not ret:breakprediction =kf.predict()measurement =np.array([[float(mouse_x), float(mouse_y)]])kf.correct(measurement)predicted_x, predicted_y =prediction[0], prediction[1]cv2.circle(frame, (int(predicted_x), int(predicted_y)), 5, (0, 255, 0), -1)cv2.imshow('Kalman Filter Tracking', frame)if cv2.waitKey(30) &0xFF==27:breakcap.release()cv2.destroyAllWindows()这是一个简单的Kalman Filter目标跟踪示例。