机械负载分类说明
平方转矩 负载
平方转矩负载【原创版】目录1.引言2.平方转矩的定义与计算方法3.负载的定义与分类4.平方转矩与负载的关系5.实际应用中的例子6.结论正文1.引言在机械工程领域,转矩是一个重要的物理量,用于描述力矩的作用效果。
平方转矩是转矩的一种类型,其计算方法是力矩的平方。
负载是指机械设备在运行过程中需要承受的外力,对机械设备的运行性能有着重要影响。
本文将探讨平方转矩与负载之间的关系,并通过实际应用案例进行分析。
2.平方转矩的定义与计算方法平方转矩是指力矩的平方,其计算公式为:M = F × L,其中 M 表示平方转矩,F 表示作用在物体上的力,L 表示力臂。
在实际应用中,平方转矩通常用于衡量机械设备的驱动能力。
3.负载的定义与分类负载是指机械设备在运行过程中需要承受的外力。
根据负载的性质,可以分为静态负载和动态负载。
静态负载是指在机械设备静止状态下作用在设备上的力,如重力、支持力等。
动态负载是指在机械设备运行过程中作用在设备上的力,如摩擦力、阻力等。
4.平方转矩与负载的关系平方转矩与负载之间存在密切的关系。
在机械设备的运行过程中,设备的驱动能力需要克服负载才能使设备正常运行。
因此,设备的平方转矩需要大于或等于负载,才能保证设备正常运行。
5.实际应用中的例子以电动汽车为例,电动汽车的驱动系统需要克服轮胎与地面之间的摩擦力、空气阻力等动态负载。
为了使电动汽车正常行驶,驱动系统的平方转矩需要大于或等于这些负载。
因此,电动汽车的驱动系统需要具备足够的平方转矩,以保证车辆在各种路况下都能正常行驶。
6.结论平方转矩与负载之间存在密切的关系,它们共同决定了机械设备是否能够正常运行。
IEC61400-13机械负载测量讲解

IEC 61400-13风力发电机组-机械载荷测量1概要范围和目标IEC 61400的这一部分解决了风力机机械载荷测量的问题。
它主要关注于大型(>40m2)水平轴风力发电机。
然而,其中描述的方法也可以应用于其它风力机(例如机械抽水机,垂直轴风力机)。
这个规范的目的是描述试验测定风力机机械载荷的方法和相应的技术。
这个技术规范被规定为用作执行测量时用来查证代码和/或用于直接测定结构载荷的指导。
这个规范不仅被规定为一系列的测量规范也被用于更多限制测量活动。
2测试期间的安全确定的测量载荷情况包括考虑涡轮运行在极端情况下和/或紧急故障条件(例如,电网丢失)。
在大多数情况下试验和测试的目的是检验原型涡轮的载荷,涡轮的运行和反应不能被假定是已经被规定的。
因此,这些试验将一致被假定为危险的并应当注意人员安全问题。
在这个基础上,这些试验将在一个安全的位置起动和观察,通常在风轮平面上风向的确定距离的地方并且人员在内部或机舱或塔架或风轮平面内将不能执行。
在执行所有的试验和试验程序之前都将获得涡轮制造商的同意以确保涡轮完整性,并且因此不会危及人员安全。
现有的有效的安全标准的要求将被遵守。
3载荷测量程序概要测量程序包括收集全面的统计数据库和设定定义涡轮在确定特殊情况下的行为的时间序列。
在这个条款中一个用于测量载荷情况(MLCs)的系统被定义用于确定风力机在被选择的IEC 61400-1的设计载荷情况(DLCs)的相关条件下的载荷。
MLCs可以直接用于DLCs相关的载荷文件,或MLCs可以提供确认在特殊和良好外部条件下计算模型的基础。
随后,此模型能被用于评估在设计条件下的载荷。
这个条款也提供了标准化的数量规范。
测量载荷情况(MLCs)概述这个次级条款描述了如何从一系列定义好的MLCs中建立载荷测量活动。
MLCs被定义在IEC 61400-1中描述的相关DLCs中。
因此,不是所有的DLCs都能通过适当的测量进行检验。
在稳定状态运行时的MLCs发电在发生故障时发电停机,空转在暂时时间中的MLCs起动普通停机紧急停机电网故障超速激活保护系统收集矩阵发电发电并发生故障停机(静止或空转)参数的标准化概述相关物理参数将被标准化为了能将风力机载荷特征分类为:●载荷参数(例如,叶片载荷、风轮载荷和塔架载荷);●气象参数(例如,风速和风、周围温度和空气压力和其它);●运行参数(例如,功率、转速、变浆角度、偏航位置、方位角度)。
机械工厂电力设计规程

机械工厂电力设计规程1.引言1.1 概述概述部分:在机械工厂电力设计规程中,电力设计是机械工厂建设过程中至关重要的一部分。
电力设计的科学合理性与效果将直接关系到机械工厂的运行质量与效益。
随着机械工业的发展,电力设施的重要性日益凸显。
机械设备和生产线的电力需求越来越复杂,对电力系统的设计提出了更高的要求。
因此,建立一套完善的机械工厂电力设计规程是必不可少的。
机械工厂电力设计规程旨在确保机械工厂电力系统的可靠性、安全性和经济性。
它包含了电源负荷计算、电力布线、设备选型、电气保护、接地与引线等方面的细则和要求,以及与建筑设计、消防安全等其他规程的协调要求。
电力设计规程的建立不仅能够规范机械工厂电力系统的建设,提高工厂电力系统的可靠性和运行效率,还能降低电力系统的维护成本,提高机械工厂的生产效益。
同时,电力设计规程的遵守也可以提高机械工厂的安全性,有效防止因电力问题引发的事故和生产故障。
为了更好地满足不同机械工厂的电力需求,电力设计规程还应根据机械工厂的特点和规模进行相应的调整和优化。
同时,随着电力技术和工业自动化的发展,电力设计规程也需要不断更新和完善,以适应新的技术和设备的应用。
因此,在机械工厂电力设计规程中,概述部分的目的是对电力设计规程的重要性进行介绍,并提出建立该规程的目的和意义。
通过对机械工厂电力设计规程的概述,读者能够全面了解本规程的内容和作用,为接下来的详细介绍做好准备。
1.2文章结构文章结构是指文章在整体上的组织结构和章节划分,以清晰地呈现出文章的内容和重点。
本文的结构主要分为引言、正文和结论三个部分。
在引言部分,我们将对机械工厂电力设计规程进行概述,介绍其背景和意义。
同时,我们还会说明本文的结构,以便读者可以更好地理解文章的内容和组织。
正文部分是文章的核心部分,将详细介绍机械工厂电力设计的相关原则和计算方法。
其中,设计原则一节将阐述在机械工厂电力设计中需要考虑的各种因素和要求,以确保电力系统的安全和可靠性;电力负载计算一节将介绍如何根据机械工厂的用电需求和负载特点进行合理的负载计算,以确定电力系统的容量和配置。
加工中心主轴负载参数表

加工中心主轴负载参数表一、加工中心主轴负载参数表概述加工中心主轴负载参数表是对主轴在加工过程中所承受的各种负载的详细描述,包括轴向、径向、扭矩和转速等方面的负载参数。
这些参数是衡量主轴性能和安全运行的重要依据,对于加工中心的选型、应用和维护具有指导意义。
二、主轴负载参数表的构成1.轴向负载参数:主要包括主轴在轴向承受的力矩、压力等。
这些参数与主轴的刚度、轴承类型及安装方式等因素密切相关。
2.径向负载参数:主要包括主轴在径向承受的力矩、弯矩等。
这些参数与主轴的径向跳动、轴承间隙及安装方式等因素有关。
3.扭矩负载参数:主要包括主轴在加工过程中承受的扭矩值。
这些参数与主轴的扭矩容量、刀具的切削力及加工材料的性质等因素有关。
4.转速负载参数:主要包括主轴在不同转速下的性能表现。
这些参数与主轴的转速范围、功率输出及加工过程的稳定性等因素有关。
三、主轴负载参数表的作用1.指导选型与应用:通过对主轴负载参数的了解,可以为用户提供合适的加工中心型号和配置,满足其加工需求。
2.辅助故障诊断与分析:当加工中心出现故障时,主轴负载参数表可作为参考,帮助用户快速定位问题,缩短故障排查时间。
3.优化加工过程与提高加工效率:通过分析主轴负载参数,可以调整加工参数,降低能耗,提高加工效率。
四、如何正确解读与运用主轴负载参数表1.了解相关概念与术语:在使用主轴负载参数表之前,需要了解其涉及的术语和概念,如主轴扭矩、转速范围等。
2.结合实际应用场景进行分析:不同应用场景下,主轴负载的需求和表现各异。
因此,在解读主轴负载参数表时,要结合实际情况进行分析。
3.对比不同厂家产品的性能指标:在选购加工中心时,可将不同厂家的主轴负载参数表进行对比,以挑选出性能优越、安全可靠的产品。
五、主轴负载参数表在实际加工中的应用案例(此处举例说明主轴负载参数表在实际加工中的应用,如提高某型号加工中心的加工效率、降低故障率等。
)六、总结与展望主轴负载参数表在加工中心选型、应用和维护方面具有重要指导作用。
机械系统设计 第三章机械系统的载荷特性与动力机选择

工作机械的负载特性是指工作机 械在运行过程中其功率、转矩和转 速或位移间的关系。选择动力机的 容量时,主要考虑工作机械在输入 动力端的转矩、功率和转速之间的 关系。Tz=f(n),Pz=f(n)。
负载特性有 : 1)恒转矩负载特性
恒转矩特性是指转矩与转速无关, 即当转速变化时,转矩保持常数。 如起重机起升机构负载特性。
计算法即根据机械的功率要求和结 构特点运用各种力学原理、经验公式 或图表等计算确定载荷的方法。
例如设计起重机时,要计算: (1)起重量(吊重)表
起升载荷包括起重机的额定起重力 和随货物一起升降的装置的重力 。
100吨全地面起重机配重28吨时起 重 量 表
带 副 臂 起 重 量 表
第三章 载荷与动力装置选择
第一节 机械系统的载荷分析
一、载荷类型
所有机械在工作中都会受到多种外 力的作用,这些外力工程上称之为载 荷。确定载荷类型、大小、变化规律 是机械系统设计的重要内容。用以计 算强度、刚度、稳定性、可靠性和寿 命,选择动力机类型和容量。
1.按载荷的作用方式分类 直接作用载荷——载荷以力或力矩的形 式直接作用在机械上,如由工作阻力产生 的载荷、惯性载荷、风载荷、驱动力、制 动力等。 间接作用载荷——以变形的形式间接作 用在机械上,如温度、地震的作用引起的 载荷。 2.按零件发生变形的不同分 拉伸载荷、压缩载荷、弯曲载荷和扭转 载荷。
确定载荷通常有三种方法:类比 法、计算法和实测法。 1.类比法
参照同类或相近的机械,根据经验 或简单的计算确定所设计机械的载荷, 这种方法称为类比法。它主要应用在 载荷较难确定的情况或初步设计阶段。 仿造(测绘)。
使用类比法确定载荷一般需要一定的实际 经验,否则容易出现载荷过大或过小的情况。 应用类比法时常可采用相似原理进行推断,其 中常用的有:
六轴机器人分类标准

六轴机器人分类标准
六轴机器人有多种分类标准,其中一种主要标准是按负载能力和应用领域来划分:
1. 工业级六轴机器人:主要应用于生产线,满足自动化生产的需求。
根据负载能力,可以分为轻型、中型和重型。
轻型负载能力小于10千克,适用于
小型零部件的加工和装配、半自动化生产线等场景;中型负载能力在10千
克至50千克之间,适用于汽车零部件、机械零部件等大批量制造的自动化
生产线;重型负载能力在50千克至500千克之间,适用于钢铁和船舶等重型制造业自动化生产线。
2. 服务级六轴机器人:主要用于服务领域,例如医疗、餐饮、照顾老年人、保安巡逻等场景。
相比于工业机器人,服务机器人更加注重外观与人性化交互设计,外形重量更加小巧灵活,功率更低。
此外,还可以根据搬运重量将六轴关节机器人分为微型机械手、小型机械手、中型机械手和大型机械手等。
如需了解更多关于六轴机器人的分类标准,建议咨询机器人领域专业人士或查阅相关文献资料。
电机的工作制分类和绝缘等级
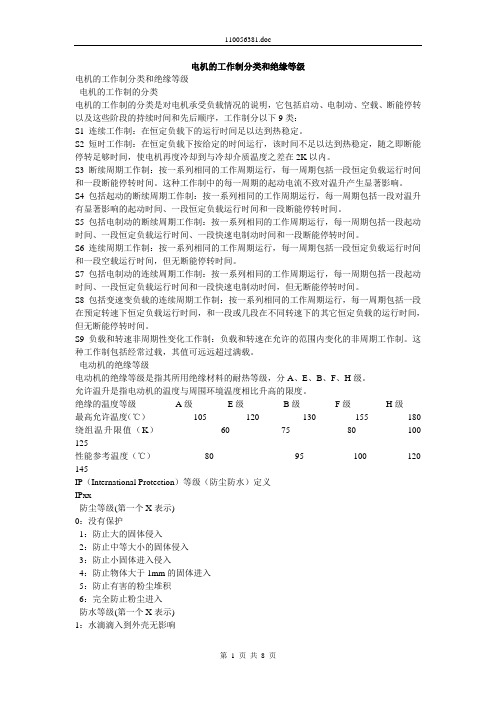
电机的工作制分类和绝缘等级电机的工作制分类和绝缘等级电机的工作制的分类电机的工作制的分类是对电机承受负载情况的说明,它包括启动、电制动、空载、断能停转以及这些阶段的持续时间和先后顺序,工作制分以下9类:S1 连续工作制:在恒定负载下的运行时间足以达到热稳定。
S2 短时工作制:在恒定负载下按给定的时间运行,该时间不足以达到热稳定,随之即断能停转足够时间,使电机再度冷却到与冷却介质温度之差在2K以内。
S3 断续周期工作制:按一系列相同的工作周期运行,每一周期包括一段恒定负载运行时间和一段断能停转时间。
这种工作制中的每一周期的起动电流不致对温升产生显著影响。
S4 包括起动的断续周期工作制:按一系列相同的工作周期运行,每一周期包括一段对温升有显著影响的起动时间、一段恒定负载运行时间和一段断能停转时间。
S5 包括电制动的断续周期工作制:按一系列相同的工作周期运行,每一周期包括一段起动时间、一段恒定负载运行时间、一段快速电制动时间和一段断能停转时间。
S6 连续周期工作制:按一系列相同的工作周期运行,每一周期包括一段恒定负载运行时间和一段空载运行时间,但无断能停转时间。
S7 包括电制动的连续周期工作制:按一系列相同的工作周期运行,每一周期包括一段起动时间、一段恒定负载运行时间和一段快速电制动时间,但无断能停转时间。
S8 包括变速变负载的连续周期工作制:按一系列相同的工作周期运行,每一周期包括一段在预定转速下恒定负载运行时间,和一段或几段在不同转速下的其它恒定负载的运行时间,但无断能停转时间。
S9 负载和转速非周期性变化工作制:负载和转速在允许的范围内变化的非周期工作制。
这种工作制包括经常过载,其值可远远超过满载。
电动机的绝缘等级电动机的绝缘等级是指其所用绝缘材料的耐热等级,分A、E、B、F、H级。
允许温升是指电动机的温度与周围环境温度相比升高的限度。
绝缘的温度等级A级E级B级F级H级最高允许温度(℃)105 120 130 155 180 绕组温升限值(K)60 75 80 100 125性能参考温度(℃)80 95 100 120 145IP(International Protection)等级(防尘防水)定义IPxx防尘等级(第一个X表示)0:没有保护1:防止大的固体侵入2:防止中等大小的固体侵入3:防止小固体进入侵入4:防止物体大于1mm的固体进入5:防止有害的粉尘堆积6:完全防止粉尘进入防水等级(第一个X表示)1:水滴滴入到外壳无影响2:当外壳倾斜到15度时,水滴滴入到外壳无影响3:水或雨水从60度角落到外壳上无影响4:液体由任何方向泼到外壳没有伤害影响5:用水冲洗无任何伤害6:可用于船舱内的环境7:可于短时间内耐浸水(1m)8:于一定压力下长时间浸水电动机的工作制的分类电机的工作制的分类是对电机承受负载情况的说明,它包括启动、电制动、空载、断能停转以及这些阶段的持续时间和先后顺序,工作制分以下9类:S1 连续工作制:在恒定负载下的运行时间足以达到热稳定。
机械负载分类说明
用变频器给电动机供电与用工频电网供电相比较,电动机的电流会增加10%而温升会增加20%左右。所以在选择电动机和变频器时,应适当留有余量,以防止温升过高,影响电动机的使用寿命。
高环境温度、高开关频率、高海拔高度等,此时会引起变频器的降容,变频器需放大一档选择。 变频器驱动同步电动机时,与工频电源相比,会降低输出容量10%~20%,变频器的连续输出电流要大于同步电动机额定电流与同步牵入电流的标称值的乘积。
恒功率负载
机床主轴和轧机、造纸机、塑料薄膜生产线中的卷取机、开卷机等要求的转矩,大体与转速成反比,这就是所谓的恒功率负载。负载的恒功率性质应该是就一定的速度变化范围而言的。当速度很低时,受机械强度的限制,TL 不可能无限增大,在低速下转变为恒转矩性质。负载的恒功率区和恒转矩区对传动方案的选择有很大的影响。电动机在恒磁通调速时,最大允许输出转矩不变,属于恒转矩调速;而在弱磁调速时,最大允许输出转矩与速度成反比,属于恒功率调速。如果电动机的恒转矩和恒功率调速的范围与负载的恒转矩和恒功率范围相一致时,即所谓“匹配”的情况下,电动机的容量和变频器的容量均最小。
●
●
自动仓库(行走)
●
●
送料器
●
●
流体机械
泵类
●
●
风机
●
●
压缩机
●
●
●
齿轮泵
●
●
●
金
属
加
工
冲床
●
●
拉丝机
●
●
离心铸造机
●
●
车床
●
●
●
磨床
●
●
电路板钻孔机
●
●
电
梯
电梯
●
【机电传动控制-辅导】复习要点
机电传动控制复习提纲第二章 机电传动系统的动力学基础2.1 知识要点2.1.1 基本内容1.机电传动系统的运动方程式机电传动系统是一个由电动机拖动,并通过传动机构带动生产机械运转的机电运动的动力学整体[如图2.1(a)所示]尽管电动机种类繁多、特性各异,生产机械的负载性质也可以各种各样,但从动力学的角度来分析时,则都应服从动力学的统一规律,即在同一传动轴上电动机转矩T M 、负载转矩T L 、转轴角速度ω三者之间符合下面的关系: T M -T L =Jdt d (2.1) 或用转速n 代替角速度ω,则为 T M -T L =dt dn GD 3752 (2.2)式(2.1)和式(2.2)称为机电传动系统的运动方程式。
机电传动系统的运动方程式是描述机电系统机械运动规律的最基本方程式,它决定着系统的运行状态,当动态转矩T d =T M -T L =0时,加速度a =dt dn =0 ,表示没有动态转矩,系统恒(匀)速运转,即系统处于稳态;当T d ≠0时,a =dt dn ≠0 ,表示系统处于动态,T d >0时,a =dt dn 为正,传动系统为加速运动;T d <0时,a =dt dn为负,系统为减速运动。
因式(2.1)和式(2.2)中的T M 、T L 既有大小还有方向(正负),故确定传动系统的运行状态不仅取决于T M 和T L 的大小,还要取决于T M 和T L 的正负(方向)。
因此,列机电传动系统的运动方程式和电路平衡方程时,必须规定各电量的正方向,也必须规定各机械量的正方向。
对机电传动系统中各机械量的正方向约定[见图2.1(b)]如下:在确定了转速n 的正方向后,电动机转矩T M 取与n 相同的方向为正向,负载转矩T L 取与n 相反的方向为正向,因此,若T M 与n 符号相同,则表示T M 与n 的方向一致;若T L 与n 符号相同,则表示T L 与n 方向相反。
也可以由T M 、T L 的方向来确定T M 、T L 的正负。
第三章 机械系统的载荷和动力选择2

一、电动机的种类、机械特性及其选择 电动机是一种最常用的动力机。 (一)电动机的种类及其机械特性 按不同的使用电源可分为交流电动机和 直流电动机两大类。 直流电动机根据励磁方式分为他励、并 励、串励、复励等型式。 交流电动机根据电动机的转速与旋转磁 场的转速是否相同分为同步电动机和异 步电动机两种。
1.峰值计数法 峰值计数法是对载荷--时间历程中的峰、 谷值进行计数以此作为载荷谱的特征量。 首先在最大和最小载荷值之间分级(或称 划分区间),然后统计每一级载荷中出现 载荷的峰值或谷值的频次,据此绘出频 次直方图。
在峰值计数法中如果只对载荷历程的峰 值计数,就称为正峰值计数法; 如果只对谷值进行计数,就称为负峰值 计数法; 如果首先求出整个载荷--时间历程的均 值,然后分别对大于均值的峰值或小于 均值的谷值进行计数,就称为跨均峰值 计数法。
图3—7称为频率直方图,该图提供了各载荷值所占 据的百分比。图中双点划线所示曲线,称为概率密 度曲线,其表征的函数称为概率密度函数。
图3-5 频率直方图
图3—8为累积频次曲线图。由该曲线完全 可确定任何一载荷值出现的频次以及所占 的概率。
四、工作机械的工作制
一般用负载持续率 FC表示 tW FC 100 tW t0 (3 - 15)
第三章 机械系统的载荷特性和动 力选择
§3-1 工作机械的载荷和工作制 一、载荷类型 按使零件发生变形的不同,载荷可分为: 拉伸(压缩)载荷、弯曲载荷和扭转载 荷等。 按载荷是否随时间变化,载荷可分为: 静载荷和动载荷。
载荷--时间历程(载荷历程):动载荷的载 荷值随时间的变化规律。 动载荷主要有:周期载荷、非周期载荷、随 机载荷。 确定性载荷 (一)周期载荷 周期载荷:载荷的大小随时间作周期性 变化。它可用幅值、频率和相位角三个 要素来描述。
生产机械的负载转矩特性分析

生产机械的负载转矩特性分析杨勇【摘要】The equation of motion of electric drive system including the relationship between electromagnetic torque, mechanical production ofthe load torque and rotational speed, which quantitatively describe the motion law of drive system. However, to solve the equations of motion, we must first know the mechanical properties of the motor and the load characteristic. Load torque characteristic refers to the function relationship between speed and torque producing mechanical work mechanism. Machiner. Machinery for the production of different characteristics of the load torque is not the same, this paper mainly for the typical load torque characteristics were introduced and analyzed.%电力拖动系统的运动方程式中包括了电动机的电磁转矩、生产机械的负载转矩与转速之间的关系,定量的描述了拖动系统的运动规律。
但是,要对运动方程式求解,首先必须知道电动机的机械特性和负载特性。
负载转矩特性是指生产机械工作机构的转矩与转速之间的函数关系,即。
液压千斤顶史上最全的十二大分类精讲
液压千斤顶世上最全的十二大分类精讲一、桥梁专用液压千斤顶1、超薄自锁式液压千斤顶超薄自锁式液压千斤顶适合应用于要求活塞长时间伸展持续支撑负荷的作业,高效的特性和机械承载的安全性,桥梁架设的支撑。
该液压千斤顶单作用,弹簧复位设计,有贯穿整个行程长度的螺纹线与整个锁环螺纹相配合。
螺母锁定使负载更安全操作非常简单,即先举起负荷,然后旋紧锁环,使其与液压千斤顶紧缩为一体,再释放液体压力,依靠机械支撑负荷。
所有型号只能垂直作业,可选配合适的标准倾斜鞍座顶帽以减少液压千斤顶的侧压风险。
超薄自锁式液压千斤顶特性:活塞有耐磨镀层,缸体内侧镀硬铬;特别的复合材料涂层使耐磨能力更强,摩擦力更小。
二、分体式液压千斤顶1、单作用液压千斤顶单作用液压千斤顶具有广泛的行程长度和举升能力范围,是维修,生产制造,建筑等作业的最佳选择。
所有的型号都有颈部螺纹,底部设计有安装孔,使得配套安装定位方便。
单作用液压千斤顶特性:外环螺纹和底部安装孔使得定位方便、安装便捷;活塞和油缸内壁镀硬铬,防止刮伤和腐蚀;高温烤漆,表面耐磨耐腐蚀及撞击;单作用设计,高强度弹簧复位,能加速活塞的回缩;防尘密封圈可减少污染,延长液压千斤顶使用寿命;每个单作用千斤顶都有一个标准的3/8"接头和防尘盖。
2、双作用液压千斤顶双作用液压千斤顶适用于高吨位的举升作业,高要求精确控制物体升降及维修作业。
在隧道管道水平推移安装作业中,它的液压复位设计能迅速而有效的将活塞缩回原来的位置,为推进下一根管子做好准备。
双作用液压千斤顶特性:双作用设计,液压复位;内置式卸压阀防止突发性的超压;可互换的硬处理沟槽为标准件配置;高温烤漆表面耐腐蚀和撞击;带环槽的鞍座防止负载物滑动;活塞杆镀硬铬,保证千斤顶的高使用寿命;装有防尘圈减少污染,延长液压千斤顶使用寿命;每台双作用千斤顶都有两个标准的3/8"NPT接头和防尘盖。
三、薄型液压千斤顶1、薄型液压千斤顶说明:薄型液压千斤顶使用范围最广,所有型号都采用弹簧复位活塞,并且结合了较低的闭合高度和最适宜的行程长度。
埃斯顿机器人 通用大负载系列 本体使用说明书

通用大负载系列本体使用说明书ESTUN机器人通用大负载系列本体使用说明书M-0104CN-10感谢您使用埃斯顿机器人产品。
在使用机器人之前,务必仔细阅读机器人安全使用须知,并在理解该内容的基础上使用机器人。
本公司致力于不断提升产品品质,本手册中与产品有关的规格和信息如有改动,恕不另行通知。
本手册中所有陈述、信息和建议均已经过慎重处理,但不保证完全正确。
本公司对于因使用本手册而造成的直接或间接损失不负任何责任。
用户必须对其应用任何产品负全部责任,须谨慎使用本手册及产品。
本手册所有内容的解释权属南京埃斯顿机器人工程有限公司。
本手册未对任何一方授权许可,不得以任何方式复制和拷贝其中的全部或部分内容。
版权所有:南京埃斯顿机器人工程有限公司产品服务热线:400-025-3336地址:南京市江宁经济开发区吉印大道1888号邮编:211102电话:************公司主页:电子邮箱:***************安全使用须知本章说明为安全使用机器人而需要遵守的内容。
在使用机器人之前,务必熟读并理解本章中所述内容。
使用埃斯顿机器人的公司、个人应该熟读所在地区、国家的标准和法律,并且安装适当的安全设施保护机器人的使用人员。
使用前(安装、运转、保养、检修),请务必熟读并全部掌握本说明书和其他附属资料,在熟知全部设备知识、安全知识及注意事项后再开始使用。
但是使用人员即使完全按照手册中给出的所有安全信息进行,埃斯顿公司也无法保证使用人员不会受到任何伤害。
使用人员的定义使用人员的定义如下所示。
•操作人员进行机器人的电源ON/OFF操作。
从操作面板启动机器人程序。
•程序人员进行机器人的操作。
在安全区域内进行机器人的示教等。
•维修人员进行机器人的操作。
在安全区域内进行机器人的示教等。
进行机器人的维护(修理、调整、更换)作业。
操作人员不能在安全区域内进行作业。
程序人员和维修人员可以在安全区域内进行作业。
在进行机器人的操作、编程、维护时,操作人员、程序人员、维修人员必须注意安全,至少应穿戴以下物品进行作业。
螺栓楔负载-概述说明以及解释
螺栓楔负载-概述说明以及解释1.引言1.1 概述螺栓楔负载是指在螺纹连接中,螺栓的拉力通过楔形结构传递到负载对象上的一种特殊载荷形式。
螺栓楔负载常见于工程领域,广泛应用于机械设备、建筑结构以及其他需要承受大载荷的领域。
螺栓楔负载的作用是通过螺纹结构的紧固性和楔形结构的传力性能,将负载均匀、稳定地传输到连接的两个物体之间,从而实现连接的稳固和承载功能。
螺栓楔负载的优势在于其能够大幅度增加连接的承载能力,并且具有较好的可靠性和耐久性。
本文主要对螺栓楔负载的定义和作用进行详细介绍。
首先会从概述螺栓楔负载的基本概念入手,阐述其在工程领域的重要性和应用广泛性。
随后,会深入探讨螺栓楔负载的定义,包括其结构特点、传力原理以及相关参数的计算方法。
进一步,还将详细介绍螺栓楔负载在实际工程中的作用以及优势,例如在大型机械设备的组装中的应用、在高层建筑结构连接中的使用等。
通过本文的研究,可以更好地了解螺栓楔负载的基本概念和作用机理,为工程设计和实施提供指导和参考。
同时,对螺栓楔负载的应用前景和发展趋势进行展望,将有助于进一步推动这一领域的研究和应用。
1.2 文章结构文章结构部分的内容可以包括以下几个方面:文章结构主要包括引言、正文和结论三个部分。
引言部分主要是对螺栓楔负载的概述,介绍该概念的起源和背景,简要说明螺栓楔负载的重要性和研究的必要性。
同时,引言还要明确本文的目的,即要解释螺栓楔负载的定义和功能,并展望在未来的应用领域。
正文部分将详细阐述螺栓楔负载的定义和作用。
首先,要对螺栓楔负载的定义进行解释,包括螺栓楔负载的物理概念、组成和结构特点等。
然后,要详细说明螺栓楔负载在实际工程中的作用,可以举例说明螺栓楔负载在不同领域的应用,如建筑、航空航天、交通运输等。
此外,还可以从安全性、可靠性、经济性等角度探讨螺栓楔负载的优势和挑战。
结论部分要对全文进行总结,并对螺栓楔负载的意义和应用的展望进行评述。
可以总结螺栓楔负载的重要性和研究成果,同时指出未来研究的方向和挑战。
机械臂工作负载
机械臂工作负载机械臂是一种能够模拟人类手臂运动的机器人,广泛应用于工业生产、医疗卫生、军事等领域。
机械臂的工作负载是指它所能承受的最大重量或力矩,是评估机械臂性能和适用范围的重要指标。
本文将从机械臂工作负载的定义、计算方法、影响因素等方面进行详细解析。
一、机械臂工作负载的定义机械臂工作负载是指机械臂在正常运行状态下所能承受的最大重量或力矩。
简单来说,就是机械臂能够承受多少重量或力矩而不会损坏或失效。
通常情况下,机械臂的工作负载由制造商在设计和制造过程中确定,并在产品说明书中公布。
二、计算方法1.静态负载计算静态负载是指在不考虑加速度和惯性作用下,物体对机械臂产生的重力或力矩。
静态负载计算需要考虑以下因素:(1)物体重量:物体本身的重量是静态负载计算的基础,通常以千克(kg)为单位。
(2)距离:物体离机械臂基座的距离也会影响静态负载,通常以米(m)为单位。
(3)重心位置:物体重心位置对静态负载也有很大影响,需要通过重心坐标计算来确定。
通过以上因素的计算,可以得到机械臂在静态状态下所能承受的最大重量或力矩。
2.动态负载计算动态负载是指在考虑加速度和惯性作用下,物体对机械臂产生的重力或力矩。
动态负载计算需要考虑以下因素:(1)加速度:物体在运动过程中所受到的加速度是动态负载计算的基础,通常以米每秒平方(m/s^2)为单位。
(2)惯性力:由于物体具有惯性,其运动过程中还会产生一定大小和方向的惯性力,需要通过牛顿第二定律计算得出。
通过以上因素的计算,可以得到机械臂在动态状态下所能承受的最大重量或力矩。
通常情况下,机械臂制造商会将静态负载和动态负载的计算结果都列在产品说明书中,供用户参考。
三、影响因素机械臂工作负载受到多种因素的影响,主要包括以下几个方面:1.机械臂结构机械臂结构对工作负载有直接影响。
一般来说,机械臂结构越坚固、稳定,其工作负载就越大。
同时,机械臂的长度、自由度数目等也会对工作负载产生影响。
起重机械施工类别划分依据
起重机械施工类别划分依据起重机械施工,这个听起来很“高大上”的话题,其实离我们并不遥远。
说到起重机械,大伙儿可能首先想到的就是那些庞大的吊车、起重机,或者就是一些超级牛的机器。
它们一看就知道是做“大事情”的,吊车一拉,一堆重物就能“飞”起来,咻地一声就能完成搬运任务。
嘿,听上去是不是挺有意思的?但其实啊,起重机械的施工类别划分也有一番讲究,咱们今天就来“深挖”一下这个话题,看看它是怎么搞的。
起重机械在施工中的应用广泛,像我们平时看到的高楼大厦、桥梁建设,这些都离不开起重机械的帮助。
不同的工程根据需求,起重机械的种类和工作方式也都不同。
比如说在一些小型的工地,可能会用到一些小型的吊车,工作起来灵活方便,但在大型的项目中,大家往往会看到超级大的塔吊,嗯,那种能把几吨重的钢铁结构吊起来的家伙。
不同的需求决定了这些机器的大小、种类,这也是为了保证施工效率,确保安全。
你一定会问了,哎,怎么分这些机器呢?简单!其实按起重机械的使用环境、负载能力以及工作性质,咱们可以大致把它们分成几类。
第一类呢,就是固定式起重机械,顾名思义,就是那些安装在一个固定位置上的机械,像塔吊、桥式起重机等等。
这些机器一般都很庞大,也很沉稳,它们的负载能力强,能够吊起重型的建筑材料,通常都用于大规模的工地。
固定式起重机械的好处就是,稳定性强,可以承受更大的负载,效率也很高。
第二类嘛,是移动式起重机械,说得直接点,就是可以到处走的吊车。
不同于固定式的塔吊,移动式起重机械不固定在一个地方,像那些施工现场常见的轮式起重机、履带起重机就是这一类。
这些机器走起路来是“轻松自在”,可以根据施工需要移动到不同的地方,不像塔吊那样死死地固定在原地,灵活性就高了不少。
它们在一些需要频繁移动的工地上特别受欢迎,像拆除工程、设备安装这些活儿,它们都能派上大用场。
再有,起重机械的分类还得看它们的工作方式。
比如说有些机械是垂直起升的,就像咱们说的塔吊,吊起来的物体基本上就是上下移动,简单明了;还有些则是水平移动,像桥式起重机,吊的东西可以在一个范围内自由走动,这对某些特殊的工程特别有帮助。
机械负载分类说明
用变频器给电动机供电与用工频电网供电相比较,电动机的电流会增加10%而温升会增加20%左右。所以在选择电动机和变频器时,应适当留有余量,以防止温升过高,影响电动机的使用寿命。
高环境温度、高开关频率、高海拔高度等,此时会引起变频器的降容,变频器需放大一档选择。 变频器驱动同步电动机时,与工频电源相比,会降低输出容量10%~20%,变频器的连续输出电流要大于同步电动机额定电流与同步牵入电流的标称值的乘积。
恒功率负载
机床主轴和轧机、造纸机、塑料薄膜生产线中的卷取机、开卷机等要求的转矩,大体与转速成反比,这就是所谓的恒功率负载。负载的恒功率性质应该是就一定的速度变化范围而言的。当速度很低时,受机械强度的限制,TL 不可能无限增大,在低速下转变为恒转矩性质。负载的恒功率区和恒转矩区对传动方案的选择有很大的影响。电动机在恒磁通调速时,最大允许输出转矩不变,属于恒转矩调速;而在弱磁调速时,最大允许输出转矩与速度成反比,属于恒功率调速。如果电动机的恒转矩和恒功率调速的范围与负载的恒转矩和恒功率范围相一致时,即所谓“匹配”的情况下,电动机的容量和变频器的容量均最小。
●
●
自动仓库(行走)
●
●
送料器
●
●
流体机械
泵类
●
●
风机
●
●
压缩机
●
●
●
齿轮泵
●
●
●
金
属
加
工
冲床
●
●
拉丝机
●
●
离心铸造机
●
●
车床
●
●
●
磨床
●
●
电路板钻孔机
●
●
电
梯
电梯
●
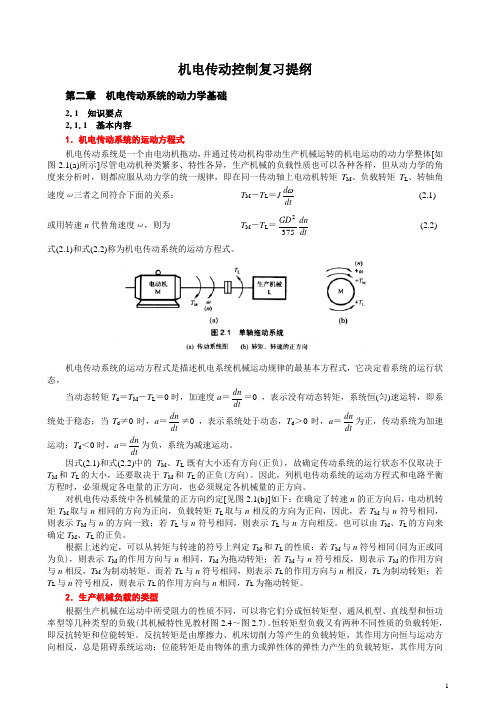
机械臂计算说明书

一、我步进电机选型:
0、定义:
负载简化:(1)、摆动相负载:将全部负载折合成作用于手指尖部的
M=2.5kg静负载
(2)、转动相:两个转动相负载(小臂、手腕转动)折合成J=0.003kg*m2 名词定义:
肩前摆Ssf 肩侧摆Sss 肩转动Sr
肘摆动Es
腕摆动Ws 腕转动Wr
1、摆动相计算:
图1-1
如图1-1,腕摆动Ws负载力矩:
M1=F×L1=25×0.15=3.75Nm
图1-2
如图1-2, 肘摆动Es负载力矩:
M2=F×(L1+L2)+Gm1×L2=8.75+2=10.75Nm
Gm1为腕关节两个电机质量和
图1-3
如图1-3, 肩前摆Ssf;肩侧摆Sss负载力矩:
M3=F×(L1+L2+L3)+Gm1×(L2+L3)+ Gm2×L3=15+4.5+7.5=27Nm
Gm2为肘关节电机与肩转Sr电机的和
2、转动相计算
腕转动Wr负载力矩
肩转动Sr负载力矩
以上两个转动相,由于转动惯量小,角加速度也很小,因此负载力矩非常小,但是需要承受给电机的轴向力,所以防止电机损坏必须加减速器,承受轴向力。
减速器的速比通过步进电机的最小工作转速确定。
#2、速度设定:
Ssf:40°/s
Sss:40°/s
Sr:40°/s
Es:30°/s
Ws:20°/s
Wr:90°/s
统计表格
黑体字的值可以依据情况减小,转速为最低转速,应该考虑满足启动,所有电机根据要求使用内置编码器。
二、电机选择与购买。
机械盘的工作负载率
机械盘的工作负载率一、引言机械盘是计算机存储设备的重要组成部分,其工作负载率直接影响到计算机的性能和稳定性。
本文将介绍机械盘的工作负载率,包括其定义、影响因素以及如何优化工作负载率。
二、机械盘工作负载率的定义机械盘的工作负载率是指机械盘在一定时间段内完成读写操作的次数与总次数的比值。
它反映了机械盘的工作繁忙程度,工作负载率越高,说明机械盘的工作越繁忙。
三、影响机械盘工作负载率的因素1. 读写操作频率:读写操作频率越高,机械盘的工作负载率就越高。
2. 磁盘容量:磁盘容量越大,需要处理的读写操作就越多,工作负载率也会相应提高。
3. 磁盘速度:磁盘速度越快,读写操作所需的时间就越短,工作负载率也会相应提高。
4. 操作系统和应用程序:不同的操作系统和应用程序对机械盘的读写操作频率和方式不同,也会影响工作负载率。
四、如何优化机械盘的工作负载率1. 合理规划磁盘分区:根据实际需求,合理规划磁盘分区,避免频繁的读写操作导致磁盘工作负载过高。
2. 优化文件系统:选择合适的文件系统,如NTFS或EXT4等,可以减少读写操作的次数,降低工作负载率。
3. 定期进行磁盘维护:定期进行磁盘碎片整理、清理垃圾文件等操作,可以提高磁盘读写速度,降低工作负载率。
4. 使用缓存技术:通过使用缓存技术,可以减少对磁盘的直接读写操作,降低工作负载率。
5. 更换更快的磁盘:如果现有的磁盘速度无法满足需求,可以考虑更换更快的磁盘,提高读写速度,降低工作负载率。
五、结论机械盘的工作负载率是计算机性能和稳定性的重要指标之一。
通过合理规划磁盘分区、优化文件系统、定期进行磁盘维护、使用缓存技术以及更换更快的磁盘等方法,可以有效地优化机械盘的工作负载率,提高计算机的性能和稳定性。
容许负载力矩表
容许负载力矩表容许负载力矩表是在工程设计和施工过程中非常重要的工具。
它能够帮助工程师和技术人员准确计算和估算机械设备、工程结构以及其他系统的负载力矩,以确保其安全可靠地运行。
本文将介绍容许负载力矩表的定义、使用方法以及其在实际工程中的作用。
1. 容许负载力矩表的定义容许负载力矩表是一种表格,列出了各种机械设备和工程结构所能承受的负载力矩的上限。
它通常根据设备或结构的特性和材料参数进行制定,并参考了相关的国家标准和规范。
容许负载力矩表的基本单位是力乘以长度,通常以牛顿米(Nm)或千牛顿米(kNm)表示。
2. 容许负载力矩表的使用方法使用容许负载力矩表需要以下几个步骤:(1) 确定设备或结构的类型和参数:在使用容许负载力矩表之前,需要明确所涉及的设备或结构的类型和参数,如长度、宽度、材料及其强度等。
(2) 找到相应的容许负载力矩表:根据设备或结构的类型,找到对应的容许负载力矩表。
不同的设备和结构可能有不同的容许负载力矩表,因此需要选择正确的表格。
(3) 查找并确定容许负载力矩值:在容许负载力矩表中,根据设备或结构的参数,查找对应的数值。
一般来说,容许负载力矩表按照不同的参数进行分类,并给出不同的容许负载力矩值范围。
(4) 判断计算结果是否安全:将实际的负载力矩与容许负载力矩进行比较,如果实际负载力矩小于容许负载力矩,说明设计或施工是安全可靠的;反之,则需要进行调整或加固。
3. 容许负载力矩表在实际工程中的作用容许负载力矩表在实际工程中扮演着重要的角色。
它有以下几方面的作用:(1) 设计依据:容许负载力矩表提供了工程师设计设备和结构时的重要依据。
通过查找表格,工程师可以快速准确地确定负载力矩的上限,从而选择合适的材料、尺寸和结构形式。
(2) 施工控制:容许负载力矩表还可以在施工过程中进行质量控制。
施工人员可以根据表格中给出的数据,确认施工中所承受的负载力矩是否在安全范围内,并及时进行调整和加固。
(3) 安全保障:使用容许负载力矩表可以确保工程设备和结构运行的安全性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
机床主轴和轧机、造纸机、塑料薄膜生产线中的卷取机、开卷机等要求的转矩,大体与转速成反比,这就是所谓的恒功率负载。负载的恒功率性质应该是就一定的速度变化范围而言的。当速度很低时,受机械强度的限制,TL 不可能无限增大,在低速下转变为恒转矩性质。负载的恒功率区和恒转矩区对传动方案的选择有很大的影响。电动机在恒磁通调速时,最大允许输出转矩不变,属于恒转矩调速;而在弱磁调速时,最大允许输出转矩与速度成反比,属于恒功率调速。如果电动机的恒转矩和恒功率调速的范围与负载的恒转矩和恒功率范围相一致时,即所谓“匹配”的情况下,电动机的容量和变频器的容量均最小。
●
●
自动仓库(行走)
●
●
送料器
●
●
流体机械
泵类
●
●
风机
●
●
压缩机
●
●
●
齿轮泵
●
●
●
金
属
加
工
冲床
●
●
拉丝机
●
●
离心铸造机
●
●
车床
●
●
●
磨床
●
●
电路板钻●
●
门机
●
●
用途
负载特性
负载性质
速度力矩特性
摩擦负荷
位能负载
流体负载
惯性负载
恒力矩
恒输出
递减力矩
递减输出
一般机械
搅拌机
●
●
塑料机械
●
●
离心机
●
●
●
工业洗衣机
●
●
●
喷涂机
●
●
木工机械
●
●
●
载重机械
立体停车厂
●
●
传送带
●
●
斗式输送机
●
●
起重机
●
●
行车(升降)
●
●
行车(行走)
●
●
卷扬机
●
●
●
搬送台车
●
自动仓库(升降)
变频器
用变频器给电动机供电与用工频电网供电相比较,电动机的电流会增加10%而温升会增加20%左右。所以在选择电动机和变频器时,应适当留有余量,以防止温升过高,影响电动机的使用寿命。
高环境温度、高开关频率、高海拔高度等,此时会引起变频器的降容,变频器需放大一档选择。 变频器驱动同步电动机时,与工频电源相比,会降低输出容量10%~20%,变频器的连续输出电流要大于同步电动机额定电流与同步牵入电流的标称值的乘积。
风机、水泵
负载
在各种风机、水泵、油泵中,随叶轮的转动,空气或液体在一定的速度范围内所产生的阻力大致与速度n的2次方成正比。随着转速的减小,转矩按转速的2次方减小。这种负载所需的功率与速度的3次方成正比。当所需风量、流量减小时,利用变频器通过调速的方式来调节风量、流量,可以大幅度地节约电能。由于高速时所需功率随转速增长过快,与速度的三次方成正比,所以通常不应使风机、泵类负载超工频运行。
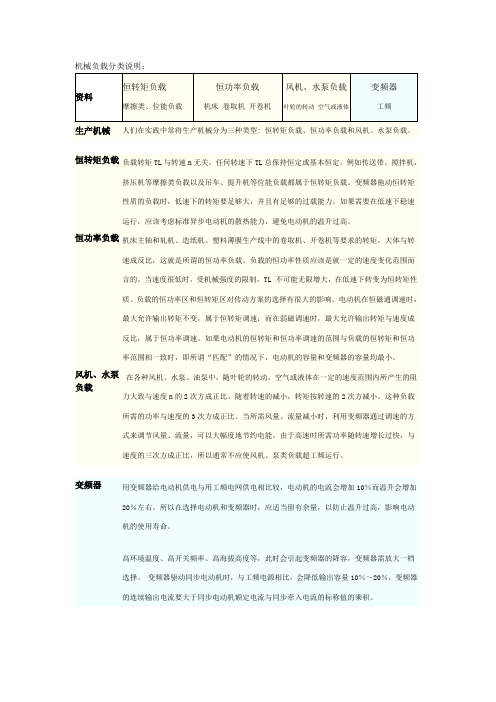
机械负载分类说明:
资料
恒转矩负载
摩擦类、位能负载
恒功率负载
机床 卷取机 开卷机
风机、水泵负载
叶轮的转动 空气或液体
变频器
工频
生产机械
人们在实践中常将生产机械分为三种类型:恒转矩负载、恒功率负载和风机、水泵负载。
恒转矩负载
负载转矩TL与转速n无关,任何转速下TL总保持恒定或基本恒定。例如传送带、搅拌机,挤压机等摩擦类负载以及吊车、提升机等位能负载都属于恒转矩负载。变频器拖动恒转矩性质的负载时,低速下的转矩要足够大,并且有足够的过载能力。如果需要在低速下稳速运行,应该考虑标准异步电动机的散热能力,避免电动机的温升过高。