运动学基础总论
运动学基础总论共30页

6
、
露
凝
无
游
氛
,
天
高
风
景
澈
。
7、翩翩新 来燕,双双入我庐 ,先巢故尚在,相 将还旧居。
8
、
吁
嗟
身
后
名
,
于
我
若
浮
烟
。
9、 陶渊 明( 约 365年 —427年 ),字 元亮, (又 一说名 潜,字 渊明 )号五 柳先生 ,私 谥“靖 节”, 东晋 末期南 朝宋初 期诗 人、文 学家、 辞赋 家、散
文 家 。汉 族 ,东 晋 浔阳 柴桑 人 (今 江西 九江 ) 。曾 做过 几 年小 官, 后辞 官 回家 ,从 此 隐居 ,田 园生 活 是陶 渊明 诗 的主 要题 材, 相 关作 品有 《饮 酒 》 、 《 归 园 田 居 》 、 《 桃花 源 记 》 、 《 五 柳先 生 传 》 、 《 归 去来 兮 辞 》 等 。
1
0
、
倚
南
窗
以寄ຫໍສະໝຸດ 傲,审容
膝
之
易
安
。
1、最灵繁的人也看不见自己的背脊。——非洲 2、最困难的事情就是认识自己。——希腊 3、有勇气承担命运这才是英雄好汉。——黑塞 4、与肝胆人共事,无字句处读书。——周恩来 5、阅读使人充实,会谈使人敏捷,写作使人精确。——培根
运动学基础第三版的重点归纳

运动学基础第三版的重点归纳第一章人体运动学总论一、名词解释1、人体运动学:是研究人体活动科学的领域,是通过位置、速度、加速度等物理量描述和研究人体和器械的位置岁时间变化的规律活在运动过程中所经过的轨迹,而不考虑人体和器械运动状态改变的原因。
2、刚体:是由相互间距离始终保持不变的许多质点组成的连续体,它有一定形状、占据空间一定位置,是由实际物体抽象出来的力学简化模型。
在运动生物力学中,把人体看作是一个多刚体系统。
运动形式有平动、转动和复合运动。
3、复合运动:人体的绝大部分运动包括平动和转动,两者结合的运动称为复合运动。
4、力偶:两个大小相等、方向相反、作用线互相平行,但不在同一条直线上的一对力。
5、人体运动的始发姿势:身体直立,面向前,双目平视,双足并立,足尖向前,双上肢下垂于体侧,掌心贴于体侧。
6、第三类杠杆:其力点在阻力点和支点的中间,如使用镊子,又称速度杠杆。
此类杠杆因为力臂始终小于阻力臂,动力必须大于阻力才能引起运动,但可使阻力点获得较大的运动速度和幅度。
7、非惯性参考系:把相对于地球做变速运动的物体作为参考系标准的参考系叫非惯性参考系,又称动参考系或动系。
8、角速度:人体或肢体在单位时间内转过的角度,是人体转动的时空物理量。
9、人体关节的运动形式:(1)屈曲(flexion)、伸展(extension):主要是以横轴为中心,在矢状面上的运动。
(2)内收(adduction)、外展(abduction):主要是以矢状轴为中心,在前额面上的运动。
(3)内旋(internal rotation)、外旋(external rotation):主要是以纵轴为中心,在水平面上的运动。
(4)其他:旋前(pronation)、旋后(supernation)、内翻(inversion)、外翻(eversion)。
二、单选题【相关概念】·第一类杠杆:又称平衡杠杆,其支点位于力点和阻力点中间,如天平和跷跷板等。
《人体运动学》第一章 总论(生物力学基础)

时间-空间参数
时间-空间参数是步行中髋、膝、踝关节运动 规律(角度变化或位移、速度、加速度等)、身 体重心的位置变化规律、骨盆的位置变化规律 的反映。
常用的有步态周期中不同时相的关节角度参数、 关节角度曲线、角度-角度图。 单一的角度数值变化意义不大。
动力学指标
(1)足-地接触力 (2)踝关节力 (3)身体重心的加速度
支点
阻力点
动力点 支点
动力点 支点
阻力点
平衡杠杆
省力杠杆
速度杠杆
2.关节活动顺序性原理
大关节最先产生运动,然后依据关节的大小出现一 定的先后顺序。
上下肢各关节的肌肉生理横断面(cm2)
关节 性别 男 女 上 肢 下 肢 肩关节 肘关节 腕关节 髋关节 膝关节 踝关节 140 89 72 51 42 31 261 142 161 97 158 92
δ /L
Linear elastic material
P/A D1
பைடு நூலகம்
D2
D3 δ /L Nonlinear elastic material P/A=C(1-e-D δ /L)
C=a constant, D=equivalent modulus e=natural log base (自然对数的底)
躯干扭转
在身体各部分完成动作时,躯干上下 两端同时绕躯干纵轴的反向转动称躯干的 扭转运动形式。
相向运动
人体处于无支撑的腾空状态完成动作 时,由于人体两端均无约束,因此身体某 一部分向某一方向活动(转动)时,身体 的另一部分会同时产生相反方向的活动 (转动),这种身体两部分相互接近(或 远离)的运动形式称相向运动。
第一章总论第一章总论内容第一节人体运动学基础与概念第二节运动学基础第一节人体运动学基础与概念第二节运动学基础第三节动力学基础第三节动力学基础第四节静力学平衡第五节生物力学基础第六节人体运动的能量代谢第七节人体运动的效果评价第四节静力学平衡第五节生物力学基础第六节人体运动的能量代谢第七节人体运动的效果评价第五节生物力学基础材料力学相关概念1运动生物力学2?应力为了引入应力的概念参照下图首先围绕k点取微小面积有分布内力的合力应力定义为
第1章运动学基础与点的运动学资料

力学模型:
建立力学模型的意义:
反映事物本质,忽略其次要因素,合理、抽象、简化,便 于数学描述。
常见的力学模型:
质点 质点系 刚体 刚体系 连续介质
参考系(参考空间):
通常选取某个物体作为描述运动的参照物,称为参考体。 与参考体相固连的整个延伸空间,称为参考系(参考空 间)。
坐标系:
确定参考系后,为了便于对物体的运动进行定量描述,即确定物体在此参考 系中的位置,还必须选定与参考系相固连的某种坐标系,从而建立物体位置 与其坐标值之间的一一对应关系。在同一参考系中可以根据需要建立不同的 坐标系。不作特殊说明,一般选取地球作为描述物体运动的参考系。 4
1
O1
O2
y
M
9
约束的分类:
按物体间相互接触的形式及其限制运动的特点,将约束分 类如下:
1.柔索约束和刚性约束; 2.光滑面约束; 3.光滑圆柱铰链约束; 4.固定铰支座约束; 5.活动铰支座约束; 6.光滑球铰链支座约束; 7.固定端约束
10
1.柔索约束和刚性约束:
柔索约束是物体与柔软不可伸长的柔索相连接而成,只限 制物体产生背离柔索方向的位移。
a
对于标量 ab a b ab
对于矢量
ab
a
b
a
b
b a b
分量与投影: 补充内容
无定义
一个矢量的某轴分量 两个不同的概念
一个矢量在某轴的投影
一个矢量的某轴分量取决于另一轴的方位。
一个矢量在某轴的投影只取决于该轴的位置。
y y
ry
r ry
r
r
rx 0
rx
rx
x
rx x
x
7
工程力学
运动学知识总结

运动学知识总结运动学是物理学中研究物体运动的学科。
下面是运动学的一些基本知识总结:运动的基本概念- 位置:物体所处的空间位置,通常用坐标表示。
位置:物体所处的空间位置,通常用坐标表示。
- 位移:物体从一个位置到另一个位置的变化量。
位移:物体从一个位置到另一个位置的变化量。
- 速度:物体在单位时间内位移的变化量,通常用公式速度 = 位移 / 时间来计算。
速度:物体在单位时间内位移的变化量,通常用公式速度 = 位移 / 时间来计算。
- 加速度:物体在单位时间内速度的变化量,通常用公式加速度 = 速度变化量 / 时间来计算。
加速度:物体在单位时间内速度的变化量,通常用公式加速度 = 速度变化量 / 时间来计算。
运动的描述- 直线运动:物体在一条直线上运动,速度和加速度的方向与运动方向一致。
直线运动:物体在一条直线上运动,速度和加速度的方向与运动方向一致。
- 曲线运动:物体在曲线上运动,速度和加速度的方向与运动方向不一定一致。
曲线运动:物体在曲线上运动,速度和加速度的方向与运动方向不一定一致。
- 匀速运动:物体在单位时间内的位移保持恒定。
匀速运动:物体在单位时间内的位移保持恒定。
- 变速运动:物体在单位时间内的位移不保持恒定,速度会变化。
变速运动:物体在单位时间内的位移不保持恒定,速度会变化。
运动的图像表示- 位置-时间图像:横轴表示时间,纵轴表示位置,可以通过连接点来表示物体在不同时间的位置,从而得到运动的轨迹。
位置-时间图像:横轴表示时间,纵轴表示位置,可以通过连接点来表示物体在不同时间的位置,从而得到运动的轨迹。
- 速度-时间图像:横轴表示时间,纵轴表示速度,可以通过连接点来表示物体在不同时间的速度变化情况。
速度-时间图像:横轴表示时间,纵轴表示速度,可以通过连接点来表示物体在不同时间的速度变化情况。
利用运动学方程求解问题- 位移-时间关系:根据位移和时间的关系,可以求解物体的速度和加速度。
位移-时间关系:根据位移和时间的关系,可以求解物体的速度和加速度。
第3章 运动学基本知识

小
2 2 a aτ an
(3-21a )
全加速度与法线间的夹角如图3.10所示。为
tan α aτ an
(3-21b )
M n α
τ
aτ
v aτ
M
α
τ
v
a an (a) a (b)
an
图3.10 切向加速度与法向加速度
例题3-3飞轮边缘上的点按 s 4 sin t 的规律运动,飞轮的半径 4 r 20cm 。试求时间 t 10 s该点的速度和加速度。 解:当时间 t 10 s时,飞轮边缘上点的速度为
2 2
例题3-2如图3.5所示为液压减震器简图,当液压减震器工作时, 其活塞M在套筒内作直线的往复运动,设活塞M的加速度为a k v , v为活塞M的速度, k为常数,初速度为 vo,试求活塞M的速度和 运动方程。
x
O
M
x
Hale Waihona Puke 图3.5 解:因活塞M作直线的往复运动,因此建立x轴表示活塞M的运动 规律,如图3.5所示。活塞M的速度、加速度与x坐标的关系为
比较式(3-7)和式(3-8)得速度在直角坐标轴上的投影为
dx (t) v = x dt x dy (t) y v y = dt v = dz z (t) z dt
(3-9)
因此,速度在直角坐标轴上的投影等于动点所对应的坐标对时间的 一阶导数。
若已知速度投影,则速度的大小和方向为
v
π
方向沿轨迹曲线的切线。 飞轮边缘上点的切向加速度为 法向加速度为
v
r t
平均速度 v 与 r 同向。 平均速度的极限为点在t瞬时的速度,即 dr v lim v t 0 dt 式(3-2)称为动点矢量形式的速度。点的速度等于动点的矢径 对时间的一阶导数。它是矢量,其大小表示动点运动的快慢,方向 沿轨迹曲线的切线,并指向前进一侧。速度单位是米/秒(m/s) 。
人体运动学基础总论

3.三个自由度 球窝关节:肩关节 杵臼关节:髋关节 平面关节:腕骨间关节、跗跖关节
四、运动链
1.开放链 远端游离为开放运动链,其远端在空间上可以 自由运动,可以随意活动某一关节或同时活动 几个关节。 2.闭合链 远端闭合为封闭运动链,只能是多关节的协调 活动,不能做单一活动。其远端连结成环状或 闭合圆圈,如骨盆和胸廓,活动范围较小。
骨杠杆:在人体,骨可以在肌肉拉力下围绕关 节轴转动,其原理与杠杆原理相同,称为骨杠 杆。
一、有关杠杆原理的几个名词
1.力点(E) 2.支点(F) 3.重力点(W)或称阻力点(R) 4.力臂(d) 5.阻力臂(dw) 6.力矩(M) M =E * d 7.阻力矩(Mw) Mw = W * dw
二、关节运动的常用术语
1.屈曲 2.伸展 3.外展 4.内收 5.旋转 6.环转
三、运动自由度
1.一个自由度(单轴关节) 屈戌关节:又名滑车关节、铰链关节,如指间关节 车轴关节:寰枢正中关节、桡尺近侧关节
2.两个自由度(双轴关节) 椭圆关节:桡腕关节 鞍状关节:拇指的腕掌关节
上肢运动大多为开放运动链
下肢活动多为封闭运动链 如下蹲时必须同时活动髋、膝、踝关节。
研究运动器官的结构是如何适应其生理功能的 学科,为功能解剖学。 研究生物体机械运动的规律,以及力与生物体 的运动、生理、病理之间关系的学科为生物力 学。 研究运动中人体和器械运动力学规律的学科, 为运动生物力学。
在研究人体运动时,是以牛顿力学理论为基础的。 在运动生物力学中,把人体简化为质点、质点系、刚 体和多刚体系等力学模型,而使研究的问题大大简化。 但是人体是生命体,因此在研究人体运动学时,还要 尽可能地考虑人的生命特征,才能正确地研究人体的 运动。
理论力学教学材料-4运动学基础

目录
运动学基础概述 运动学基本定理 运动学分析方法 运动学应用实例 运动学问题求解技巧 运动学问题综合练习
01
CHAPTER
运动学基础概述
运动学是研究物体运动规律的学科,它主要关注物体位置、速度和加速度等运动参数随时间的变化。
定义
在运动学中,我们通常将物体的运动分解为平动和转动,并分别研究它们的运动规律。
概念
定义与概念
工程应用
运动学在工程领域中有着广泛的应用,如机械设计、机器人技术、航空航天等。通过对运动学的研究,我们可以更好地理解各种机械系统的运动行为,优化设计,提高性能。
基础学科
运动学是理论力学的一个重要组成部分,是学习动力学和振动理论的基础。掌握运动学的知识对于深入学习力学其他分支以及相关学科具有重要意义。
火箭发射的运动学分析
VS
卫星轨道的运动学分析涉及到卫星的发射、运行和回收等阶段,需要对卫星的轨道、速度、加速度等参数进行精确计算和控制。
详细描述
卫星轨道的运动学分析需要对地球引力、太阳辐射压和其他天体对卫星的作用力进行精确计算,以确定卫星的轨道参数、运行速度和周期等。这需要运用运动学的基本原理,如万有引力和离心力之间的关系,以及轨道稳定性和变轨控制等。
要点一
要点二
详细描述
通过分析行星绕太阳运动的实例,深入理解椭圆轨道和开普勒定律的基本原理。掌握行星绕太阳运动的轨迹和周期性规律,了解行星轨道参数的测量和计算方法。同时,了解行星运动对地球气候和天文观测的影响。
练习三:行星绕太阳运动的运动学分析
THANKS
感谢您的观看。
总结词
卫星轨道的运动学分析
汽车行驶的运动学分析涉及到汽车的起步、加速、减速和转弯等阶段,需要对汽车的运动轨迹、速度、加速度等参数进行精确控制。
运动学基础第二章 运动学基础

肌拉力线:肌肉起点、止点中心的连线。
若是超关节,则以动点中心
到拐弯中心的连线。
10
(二)内力
2、组织弹力:当机体拉伸、压缩、扭转时 会发生形变,弹力是机体形变做功的能力。
希尔三元素:a,可收缩成分:骨骼肌纤维
b,串联弹性元:肌腱
c,并联弹性元:结缔组织
11
(二)内力
3、其他:各内脏器官的摩擦力、
39
牛顿第二定律及其应用
牛顿第二定律:当物体收到的合外力不为 零时,物体的运动状态会发生改变。(加 速度定律)
计算 F=ma
这点也就是前面所言的冲量的内容
40
牛顿第三定律及其应用
牛顿第三定律:作用力与反作用力 牛顿第三定律的应用:增加人体对外界的作用力可以增大
外界对人体的反作用力(起跑)
2、力的空间累积效应:力与力作用方向上移动距离的乘 积(F.S),是力的空间累积效应,在力学上称力对物体做 了功。
15
1)、动量定理
物体在运动过程中,在某段时间内动量的改变,等于所受 合外力在这段时间内的冲量。即:
KI
F tm t v v0
16
动量定理和动量守恒定律:
1. 动量与冲量的概念 ① 动量(矢量性)
重点与支撑点的关系 下支撑点平衡
混合支撑平衡
平衡
稳定平衡
平衡稳定程度 有限稳定平衡
不稳定平衡
随遇平衡
45
人体平衡的分类
1、根据人体重心与支撑点的位置关系 上支撑平衡(悬垂平衡) 下支撑平衡(倒立平衡) 混合支撑平衡(肋木侧平衡)
2、根据平衡的稳定性(稳度)----保持平衡的能力 ▪稳定平衡(吊袋、悬垂 ) ▪有限度的稳定平衡(人下支撑平衡) ▪不稳定平衡(单臂倒立) ▪随遇平衡(球的平衡)
运动学基础

肌肉分类
(2)按照运动功能分类 1)原动肌(agonist) 2)辅助肌(assistant mover) 3)拮抗肌(antagonist) 4)固定肌(fixator) 5)协同肌(synergist)
肌肉分类
按肌肉的运动作用分类: 提肌 下降肌 括约肌
肌肉分类
按照关节运动方向分类 屈肌、伸肌、内收肌、外展肌、旋前肌、
第一节 运动学基础
一、运动学的概念
运动学(kinematics)是运用几何学的方 法来研究物体运动的学科。
运动特征
位置改变的轨迹 位移距离 速度 加速度等。
运动疗法(kinesiotherapy)
运动疗法是根据疾病的特点和病人功能 情况,利用力学的原理,通过病人自身的 力量或治疗师的辅助操作或借助于器械所 进行的主动或被动运动,以改善局部或全 身功能为目的的一种治疗方法。
特殊关节运动
躯干:前屈、后伸、侧屈 臂有旋前、旋后 腕关节有掌屈、背屈 踝关节有跖屈、背屈、外翻(包括旋内、外
展、背屈)与内翻 (包括旋外、内收、跖屈) 等的运动
关节的分类
1.按照关节组织结构分类:可以分为纤维性 关节、软骨性关节和滑膜性关节。
2.按组成骨的数目分类,可以分为: (1)单关节 (2)复合关节
关节的分类
3.按运动多少分类: (1)不动关节 (2)少动关节
①靠纤维连接 ②靠韧带和骨间膜连接 (3)活动关节
关节的分类
4.按运动轴多少分类: (1)单轴性关节
①滑车关节 ②车轴关节 (2)双轴性关节 ①椭圆关节 ②鞍状关节 (3)多轴性关节 ①球窝关节 ②杵臼关节 ③平面关节
关节的活动度和稳定性
肌肉分类
(5)按组织生化学染色分类 肌肉可分为I型与Ⅱ型
运动学基础

ad d vtττvτ2naττannaτan
切向加速度:
a
d v dt
s
表示速度矢量大小的变化率;
法向加速度:
an
v 2
表示速度矢量方向的变化率;
点的速度与加速度
描述点的运动的弧坐标表示法
讨论1:
弧坐标中的加速度表示:
点沿着一螺旋线自外向 内运动。点所走过的弧长 与时间的一次方成正比。 请判断点的运动性质:
s
弧坐标中的加速度表示:
P'
P
/2
dτ
d
lim τ lim 2τ
0
0
sin
2
sin
lim
2
0
1
当 0时,
2 的极限方向垂直于 ,亦即n方向。
dτ n d
点的速度与加速度
描述点的运动的弧坐标表示法
s
弧坐标中的加速度表示:
P'
P
/2
d dsd 1
dt
dt
ds
vτ
其中:
d 1 曲率 ds
平移刚体上各点的加速度
平移的特点
平移的特点
应该注意,平移刚体内的点,不一定沿直线运动,也 不一定保持在平面内运动,它的轨迹可以是任意的空间曲 线。
—运动副
高副—通过点、线接触
低副—通过面接触
移动副 转动副
6.2 点的运动
描述点的运动的矢量法
z
O
x
位置矢量为变矢量
P
P´
r = r (t) ---点的运动方程
r r´ r P
点P在运动过程中,其位置矢量 的端点描绘出一条连续曲线
y ----位矢端图(运动轨迹)
运动学基础

运动学基础 / 骨骼肌的功能解剖与生物力学
F
f1
f2
50/61
运动学基础 / 骨骼肌的功能解剖与生物力学 3)生理学条件 ① 兴奋性和疲劳 ② 中枢神经系统功能状态
51/61
运动学基础 / 骨骼肌的功能解剖与生物力学
①兴奋性和疲劳:肌肉是由多条肌纤维组成,肌纤维全部 收缩时,肌力最大。肌肉的兴奋性正常,则肌纤维易于达 到全部兴奋。肌肉的兴奋性决定于其本身的功能状态及支 配肌周围神经的功能状态。肌肉失去神经支配或肌肉的兴 奋性下降,均会引起肌力下降,肌肉疲劳肌力也会降低。
34/61
运动学基础 / 骨骼的功能解剖与生物力学
35/61
运动学基础 / 骨骼的功能解剖与生物力学
36/61
运动学基础 / 骨骼的功能解剖与生物力学
骨骼肌为支持身体运动的肌肉,由收缩成分和弹性成分构成。 收缩成分的基本单位是肌原纤维,由肌凝蛋白微丝和肌动蛋白 微丝组成,兴奋时肌丝滑行,引起收缩。弹性成分指的是肌腱 和肌膜。肌肉的两端是肌腱,为胶原纤维平行排列组成,具有 一定的弹性,与肌肉呈串联关系,称为肌肉的串联弹性成分; 肌膜包括肌内膜、肌束膜和肌外膜,由结缔组织组成,含有胶 原纤维和弹性纤维,它包裹着肌肉的收缩成分,与收缩成分大 致呈并联关系,称肌肉的并联弹性成分。
等长收缩(isometric contraction) 肌肉收缩时,肌张力达最大值,但肌肉的长度并未改变, 关节不活动,称等长收缩。肌肉本身未做功,所增强的能 量全部变为热能。等长收缩为静态活动,可保持关节的位 置。
40/61
运动学基础 / 骨骼肌的功能解剖与生物力学
等张收缩(isotonic contraction) 肌肉收缩时肌张力不变,肌收缩速度可变,产生关节活 动,肌肉做功叫等张收缩。 等张收缩有两种形式,二者均为动态活动,使肌肉能带动 关节并控制其活动。 ①向心性肌收缩:起点和止点相靠近; ②离心性肌收缩:起点和止点远离。
第六章 运动学基础
第二篇 运动学引言在静力学中,我们研究了物体在力系作用下的平衡条件。
如果作用在物体上的力系不平衡,物体的运动状态将发生变化。
研究物体运动变化的规律以及引起运动改变的原因属于运动学和动力学的研究范畴。
1研究内容运动学是从几何方面来研究物体的运动。
即:研究物体运动的几何性质,而不涉及改变运动的原因。
几何性质:轨迹、运动方程、速度和加速度。
2几个基本概念参考体:物体的运动是绝对的,但对某一物体的运动描述是相对的。
任何一个物体在空间的位置和运动情况必须选取另一个物体作为参考才能确定,这个参考的物体称为参考体。
与参考体固连的坐标系称为参考系。
在运动学中,将固连于地球上的参考系,通常称为静参考系。
瞬时:指物体在运动过程中某一时刻,它对应于物体运动的瞬时状态。
时间间隔:指两个瞬时相隔的时间,它表示某事件所经过的一段时间历程。
质点:只具有质量而无大小的几何点。
研究物体的运动时,如果物体的大小和形状对所研究的问题并不是主要因素,就可以把物体抽象化为一个质点。
在运动学中不涉及质量,常简称为点或动点。
第六章 运动学基础目的和要求:掌握描述点的运动的矢量法、自然法和直角坐标法,能熟练求点的运动轨迹、速度和加速度。
掌握刚体平动和定轴转动的概念,会计算转动刚体的角速度和角加速度。
会计算转动刚体上一点的速度和加速度。
能用矢积表示转动刚体上一点的速度、加速度。
重点和难点:点的运动学,刚体的基本运动。
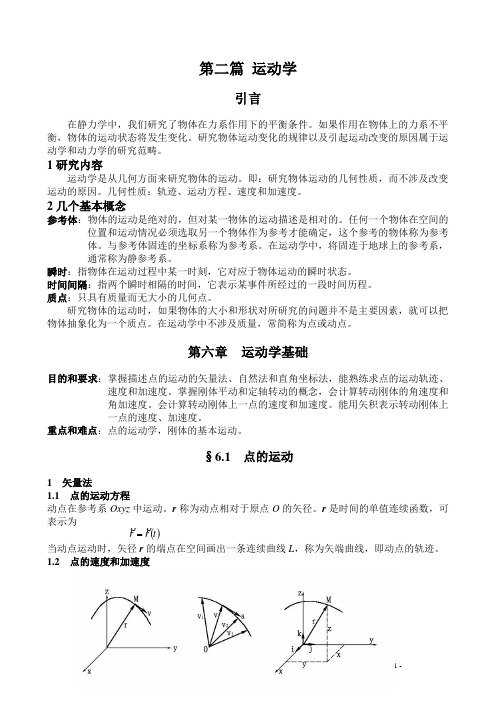
§6.1 点的运动1 矢量法1.1 点的运动方程动点在参考系Oxyz 中运动。
r 称为动点相对于原点O 的矢径。
r 是时间的单值连续函数,可表示为()t r r=当动点运动时,矢径r 的端点在空间画出一条连续曲线L ,称为矢端曲线,即动点的轨迹。
1.2 点的速度和加速度速度:描述动点运动快慢和方向的物理量,等于矢径对时间的一阶导数。
r dtr d v== 速度是矢量,它的模等于dtrd ,方向沿矢端曲线的切线,并指向运动的前进方向。
《人体运动学》第一章 总论(运动学、动力学基础)

内容
第一节 人体运动学基础与概念 第二节 运动学基础 第三节 动力学基础 第四节 静力学平衡 第五节 生物力学基础 第六节 人体运动的能量代谢 第七节 人体运动的效果评价
第二节 运动学基础
1
运动学基本概念
2
运动学描写的基本知识
运动学基本概念
(一)物理量 标量、矢量、张量
(二)运动学描写常见的物理量 时刻、时间 位置、位移、路程、轨迹
体阻力 2.内力:肌肉拉力、各组织器官间的被动阻
力、各内脏器官的摩擦力、内脏器官和固定装置 间的阻力等。 (二)牛顿定律
1.牛一 2.牛二 3.牛三
(三)功与能 1.功:作用力与受力点沿力的方向上的位移
的乘积。 2.功率:是描述力对物体做功快慢的物理量,
它等于力在单位时间内对物体所做的功。 3.动能 动能物定体理所:做末的态功的Ek动 12能mv与2 初态动能的差等于
t0 t
3.角加速度:指单位时间内角速度的变化量。
a lim
t0 t
4.转动惯量:转动惯量的大小不仅与物体的质
量有关,还与质量的分布及转轴的位置有关。 (1)对于质量为m的质点,如果它离转轴的
垂直距离为r,那么,这个质点对该转轴的转动 惯量为I=mr2
在研究人体转动问题时,转动惯量是一个必测的基本参数。
4. 保守力与非保守力:重力、弹性力、万
5.势能
重力势E能pG mgh
E pk
弹性势能
1 2
kx2
6.机械能:动能和势能之和
7.功能原理:系统的外力做功与系统内部非保 守力做功的总和等于系统总的机械能的改变。
8.机械能守恒定律:
如果系统的外力做功等于零,并且系统内 部没有非保守力做功,则系统的总机械能将不 随系统状态的改变而改变。这就是机械能守恒
运动学基础原理
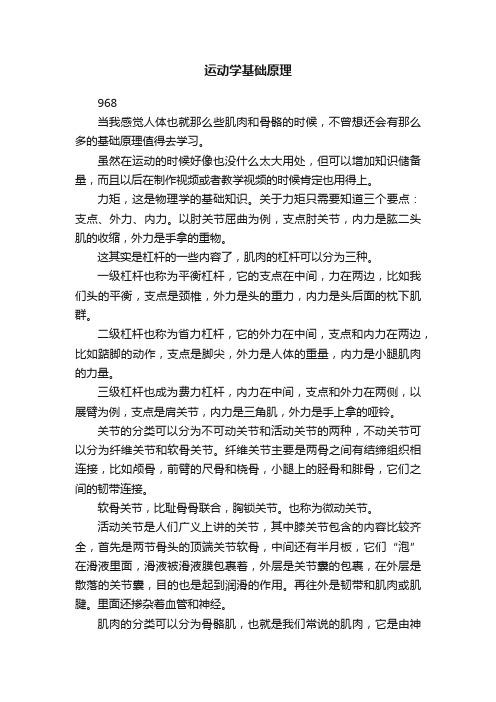
运动学基础原理968当我感觉人体也就那么些肌肉和骨骼的时候,不曾想还会有那么多的基础原理值得去学习。
虽然在运动的时候好像也没什么太大用处,但可以增加知识储备量,而且以后在制作视频或者教学视频的时候肯定也用得上。
力矩,这是物理学的基础知识。
关于力矩只需要知道三个要点:支点、外力、内力。
以肘关节屈曲为例,支点肘关节,内力是肱二头肌的收缩,外力是手拿的重物。
这其实是杠杆的一些内容了,肌肉的杠杆可以分为三种。
一级杠杆也称为平衡杠杆,它的支点在中间,力在两边,比如我们头的平衡,支点是颈椎,外力是头的重力,内力是头后面的枕下肌群。
二级杠杆也称为省力杠杆,它的外力在中间,支点和内力在两边,比如踮脚的动作,支点是脚尖,外力是人体的重量,内力是小腿肌肉的力量。
三级杠杆也成为费力杠杆,内力在中间,支点和外力在两侧,以展臂为例,支点是肩关节,内力是三角肌,外力是手上拿的哑铃。
关节的分类可以分为不可动关节和活动关节的两种,不动关节可以分为纤维关节和软骨关节。
纤维关节主要是两骨之间有结缔组织相连接,比如颅骨,前臂的尺骨和桡骨,小腿上的胫骨和腓骨,它们之间的韧带连接。
软骨关节,比耻骨骨联合,胸锁关节。
也称为微动关节。
活动关节是人们广义上讲的关节,其中膝关节包含的内容比较齐全,首先是两节骨头的顶端关节软骨,中间还有半月板,它们“泡”在滑液里面,滑液被滑液膜包裹着,外层是关节囊的包裹,在外层是散落的关节囊,目的也是起到润滑的作用。
再往外是韧带和肌肉或肌腱。
里面还掺杂着血管和神经。
肌肉的分类可以分为骨骼肌,也就是我们常说的肌肉,它是由神经自主支配的,当然也有的是无意识动起来的。
平滑肌,也就是组成我们内脏的肌肉,心肌就是心脏的肌肉。
心肌是自主收缩的,而且是生生不息,而平滑肌则是需要的时候就会自主收缩,比如肠胃消化食物时候的蠕动。
关于力的产生主要是肌肉的收缩,肌肉可以分为肌腱和肌腹两部分,肌腹是主要发力的地方,有一根根的肌纤维在肌筋膜的包裹下组成的肌肉,最小的单位就是肌纤维了。
第六章运动学基础

自然坐标法:动点轨迹已知时的运动分析; 点:指不计大小和质量,但在空间占有确定位置的几何点
例6-1 某歼击机飞行员做俯冲飞行训练时,若其飞行曲线AB近似一半径r=800m的圆弧,如图所示。
v y=dy/dt=-2Rwsinwt
一、用弧坐标表示点的运动方程
当动点M沿轨迹运动时,它的位置
随着时间而变化,即弧长s是时间t 的单值连续函数,可表示为
z
(+)
M
s=f(t) 上式称为动点
O1
沿已知轨迹的运动方程
O
(-)
y
x
第三节 描述点运动的自然法
自然轴系
(-) O1
动点M沿已知平面轨迹AB运动。在轨迹上
M
与动点M相重合的一个点处建立一个坐标
x轴和y轴对时间的一阶导数,即
速度
α—υ与x轴之间所夹的锐角,
υ的方向由υ x和υ y的正负号决定
第二节 描述点运动的直角坐标法
III. 加速度
动点的加速度沿直角坐标轴的两个分量ax和ay的大小,等于 其相应的速度分量的大小对时间的一阶导数,等于其相应 的坐标对时间的二阶导数,即
加速度
第二节 描述点运动的直角坐标法
参考系:在参考体上固结的坐标系称为参考系 点:指不计大小和质量,但在空间占有确定位置的几何点 刚体:指由无数点组成的不变形系统 时间间隔:对应于物体在不停顿的运动中从某一位置移动到另 一位置所经历的时间
瞬时:时间间隔趋于零的一瞬间
第六章 点的运动学
主要研究内容 描述点运动的矢量法 描述点运动的直角坐标法 描述点运动的自然法
康复医学概论3-运动学基础

3.血压反应
运动时,心输出量增多和血管阻力因素 可以引起相应的血压增高
4.维持和增强心血管的功能
由 于心脏舒张期的延长使冠状动脉得到更充分的 灌注,改善冠状动脉的血液循环 运动能增加纤溶系统的活性,降低血小板的 粘滞性,防止血栓的形成
(一)心血管系统
严格卧床者,基础心率加快,舒张期缩 短,将减少冠状动脉血流灌注,所以,长 期卧床者,即使从事轻微的体力活动也可 能导致心动过速 卧床后最大摄氧量(V02max)下降,肌肉 功能容量减退,肌力和耐力下降
长期卧床患者心脏对于体液的重新分布 的反应在早期和后期有所不同 早期中心血容量增加导致基础心率增加 长期卧床患者血小板聚集、动脉血流速 度降低、下肢血流阻力增加、血液的粘滞 度增高,增加了静脉血栓形成的危险性
卧位时腹压减小,不利于膀胱排空 腹肌无力和膈肌活动受限、盆底肌松弛、 神经损伤、患者神经支配异常而导致括约 肌与逼尿肌活动不协调,都是促成尿潴留 的因素 瘫痪患者导尿次数多,尿路感染的几率 增加 结石的形成降低了抗菌药物的治疗效果, 尿路感染反复发作
长期卧床的患者易发生直立性低血压, 表现为面色苍白、出汗、头晕,收缩压下 降,心率加快,脉压下降,重者产生晕厥 其发生机制: ①由于重力的作用血容量从中心转到外 周,即血液由肺和右心转向下肢 ②交感肾上腺系统反应不良,不能维持 正常血压
(二)呼吸系统
卧床数周后,患者全身肌力减退,呼吸 肌肌力也下降,加之卧位时胸廓外部阻力 加大,弹性阻力增加,不利于胸部扩张, 肺的顺应性变小,肺活量明显下降 卧位时膈肌的运动部分受阻,使呼吸运 动减小 侧卧位时下侧肺通气不良而血流灌注过 度,造成动静脉短路,导致通气/血流比 值的失调
卧床使气管纤毛的功能下降,分泌物粘 附于支气管壁,排出困难 侧卧位时下部支气管壁附着的分泌物较 上部为多,而由于咳嗽无力和卧位不便咳 嗽,分泌物沉积于下部支气管中,容易诱 发呼吸道感染
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
二关节的分型
• • • • • • • • • • (一)单轴关节 1.滑车关节 2.圆柱关节 (二)双轴关节 1.椭圆关节 2.鞍状关节 (三)三轴关节 1.球窝关节 2.杵臼关节 3.平面关节
三、关节的灵活性和稳定性
• • • • 1.构成关节的两个面的面积大小之差 2.关节囊的厚薄与松紧度 3.关节韧带的强弱与多少 3.关节周围肌群的强弱与伸展性
• • • • • •
三、运动自由度
1.一个自由度 指关节、寰枢关节、桡尺近侧关节 2.两个自由度 桡腕关节、拇指的腕掌关节 3.三个自由度 髋关节、肩关节
四、运动链
• • • • 1.开放链 其远端在空间上可以自由运动 2.闭合链 其远端连结成环状或闭合圆圈,如骨盆和 胸廓,活动范围较小。
第四节骨骼的力学特性
第七节肌肉的力学特性
• • • • • • • • • • 一、运动单位 一个运动神经元和它所支配的肌肉纤维,称为一个运动单位。 二、肌纤维的结构和收缩原理 1.肌纤维的结构 2.骨骼肌的收缩原理 H:\康复医学概论\骨骼肌的收缩_高清.mp4 三、骨骼肌纤维的类型 1.Ⅰ型肌纤维:慢-氧化型纤维 2.Ⅱa型肌纤维:快-氧化型纤维 3.Ⅱb型肌纤维:快-糖酵解型纤维
• (三)肌张力异常
• 1.肌张力下降:折刀样 • 2.肌张力增高:铅管样、齿轮样 • 3.混合状态
第八节韧带、肌腱的力学特性
• • • • • • • 一、韧带、肌腱的基本机构 二、韧带的力学特性 1.应力-应变关系 2.蠕变 3.应力松弛 三、肌腱的力学特性 四、肌腱、韧带所致的功能障碍
四、肌肉的收缩形式
• • • • • • • • (一)等张收缩 1.向心收缩 2.离心收缩 (二)等长收缩 1.原动肌 2.抗拮肌 3.固定肌 4.中和肌
• 五、肌肉在关节活动中的作用
六、肌肉的力学特性
• • • • • • • • • (一)肌肉的生理特性 1.兴奋性 2.收缩性 (二)肌肉的物理特性 1.伸展性 2.弹性 3.黏滞性 (三)后负荷对肌肉收缩的影响 (四)前负荷或肌肉初长度对肌肉收缩的影响
七、影响肌力的因素
• • • • • 1.肌肉的生理横断面 2.肌肉初长度 3.肌肉的募集 4.肌纤维走向与肌腱长轴的关系 5.杠杆效率
八、肌肉运动功能障碍
• (一)肌肉的 病理状态
• 1.假性肌肥大 • 2.肌肉萎缩 • 3.肌肉挛缩
• (二)肌力下降
• • • • • 1.年龄因素 2.失用性 3.肌源性 4.神经源性 5.神经肌肉接头病变
第四章运动学基础总论
• 掌握作用于人体的力、人体运动的杠杆原 理、运动平面和运动轴、关节运动的常用 术语、运动自由度、肌肉收缩形式。 • 熟悉关节、肌肉运动功能障碍的类型及特 点。 • 了解骨、关节、肌肉、肌腱、韧带的生物 力学特性;影响肌力的因素;肌细胞的结 构与收缩原理。
• 运动学是研究人体活动的科学,即运 用物理方法研究人体节段运动和整体 运动时,人体在空间的位置变化与时 间的关系,运动与力的关系,以及伴 随运动而发生的一系列生理、生化等 改变。
第一节作用于人体的力
• • • • • • • • • • 一、内力:人体内部各组织器官之间相互作用的力。 1.肌肉收缩产生的力 2.各组织器官间的被动阻力 3.各内脏器官间的摩擦力 二、外力:外界环境作用于人体的力。 1.重力 2.支撑反作用力 3.摩擦力 4.流体作用力 5.器械的其他阻力
第二节人体运动的杠杆原理
• • • • • 一、骨组织结构 (一)骨细胞 (二)基质 1.松质骨(有机质) 2.密质骨(无机质)
二、骨骼的力学特性
• (一)骨骼的载荷模式 • 1.拉伸 • 2.压缩 • 3.弯曲 • 4.剪切 • 5.扭转 • 6.复合载荷 (二)应力对骨结构的影响
第五节关节的力学特性
• 关节是指两个或者两个以上骨骼相连接的部 位。 • 一、关节的结构 • (一)主要结构 • 1.关节面 • 2.关节囊 • 3.关节腔 • (二)辅助结构 • 韧带、关节盘、关节唇
四、关节运动功能障碍
(一)关节活动范围受限 1.挛缩 2.强直 (二)关节活动范围过大 1.外伤性 2.炎症性 3.神经性
第六节关节软骨的力学特性
• 在滑液关节或自由活动关节中,关节的两骨 端有一层1~5mm厚的致密白色结缔组织,称 为关节软骨。 • 主要功能:扩大关节接触面以分散接触应力, 缓冲关节应力,减少关节面运动时的摩擦。 • 一、关节软骨的基本结构 • 二、关节软骨的力学特性
• 骨杠杆:在人体,骨可以在肌肉拉力下围绕关节 轴转动,其原理与杠杆原理相同,称为骨杠杆。 • 一、有关杠杆原理的几个名词 • 1.力点(E) • 2.支点(F) • 3.重力点(W) • 4.力臂(d) • 5.阻力臂(dw) • 6.力矩(M) • 7.阻力矩(Mw)
二、杠杆的分类
• 1.第一类杠杆:平衡杠杆 • 2.第二类杠杆:省力杠杆 • 3.第三类杠杆:速度杠杆
第三节关节的运动
• • • • • • • • • • • • 一、运动平面和运动轴 (一)人体的基本姿势 1.解剖位 2.中立位 (二)运动面 1.矢状面 2.冠状面(额状面) 3.水平面(横切面) (三)运动轴 1.矢状轴 2.冠状轴(额状轴) 3.垂直轴(纵轴)
二、关节运动的常用术语
• • • • • • 1.屈曲 2.伸展 3.外展 4.内收 5.旋转 6.环转