智能车模块4电源原理图.ppt
飞思卡尔智能车电源设计
E Ud 1
直流升压斩波电路(Boost Chopping)
• 电路两种工作状态。 状态一 在开关管T导通时, 电流经电感L、T流通, iL 上升, 电感储能。 负载R由电容C提供电流,二极管的作用是阻断电 容经开关管T放电的回路。 状态二 在T关断时,二极管D导通,电容C在电 源E和电感反电动势的共同作用下充电,电感释放 储能,电流iL从I02下降,iL同时提供电容的充电 电流和负载电流iR。如果电容足够大,电容两端 电压ud波动不大,负载R的电流是连续的。
的。
直流升降压斩波电路
直流升降压斩波电路
Ud E 1
• 当0≤α≤0.5时,Ud<E, • 在0.5≤α<1时,Ud>E, • 因此调节占空比α,电路既可以 降压也可以升压。
TPS73XX系列开关稳压芯片 的电源设计
• 美国TI公司微功耗、低压差电源管理 芯片, • 有2.5、3、3.3、4.85、5V几种固定电 压输出和一种可调电压输出, • 输出电流限制在1A左右,TPS7350在 100mA时只有35mV压差。
芯片规格
• • • • • • TPS7325 TPS7303 TPS7333 TPS7348 TPS7350 TPS7301 输出电压2.5V 输出电压3.0V 输出电压3.3V 输出电压4.85V 输出电压5V 输出电压1.2~9.75V
使用注意事项:
• 由于热损失小,基本上可以不考虑散热器。 • 芯片SENSE端直接连接输出端Vo,并且接 线尽可能短,以减小噪声,不推荐在SENSE 端和输出端Vo之间接RC滤波器。 • TPS7350通常不需要输入滤波电容,如果电 源离TPS7350有几英寸,使用陶瓷旁路电容 可以改善动态响应和有利降低噪声。为了保持 输出电压稳定性,一般在输出端接10μF旦电 容即可。 • TPS7350集成了电源复位电路,将RESET引 脚接至HCS12DG128B的复位引脚,可以代 替通常使用的MC34064复位芯片。
智能车设计原理及电路图
1.红外接收控制电路由红外接收头ICl、晶体管Vl、电阻器Rl-R3、RlO、电容器Cl-C3和脉冲分配器集成电路IC2组成。
2.音效/语音电路由音效集成电路IC3、语音集成电路IC4、晶体管V2-V5、电阻器R4、R5和二极管VDl-VD4组成。
3.驱动电路由晶体管V6-Vll、电阻器R6-R9和电动机M组成。
4.电源电路由电池GB、电源开关S、滤波电容器C2、C4、C5和电阻器R2组成。
1. 接通电源开关S时,IC1的3脚输出高电平,使Vl饱和导通,IC2的YO端输出高电平,此时电动机M不工作,汽车停止不动。
按一下遥控器上任意键时,ICl接收到红外遥控信号并将其转换为电信号,该信号经ICl内电路处理后从其3脚输出一个高电平脉冲,使Vl由导通变为截止,从IC2的CP端输入一个计数脉冲,使C2的Yl端输出高电平,VDl和V2导通,IC3通电工作,其O/P端输出的音效电信号经V3放大后,驱动BL发出警笛声。
2. 再按一下遥控器,IC1的3脚又输出一个高电平脉冲,使V1瞬间截止,IC2的CP端又加入一个计数脉冲,其Y2端输出高电平,使V6。
V8导通,M正转,汽车前进;同时,VD2导通,IC3和V2、V3仍维持工作,BL仍发出警笛声。
3. 第3次按动遥控器按键时,IC2的Y3端输出高电平,Y2端变为低电平,VD2和V2、V3、V6-V8、1C3停止工作,M停转;同时VD3导通,使V5导通,IC4通电工作,其O/P端输出的语音电信号经V4放大后,驱动BL发出“倒车,请注意!”的语音声。
4. 第4次按遥控器按键时,IC2的Y4端输出高电平,使V9-Vll导通,M反转,汽车后退;同时VD4导通,使V4、V5和1C4维持工作。
5. 第5次按遥控器按键时,IC2的Y5端输出高电平,IC2强制复位,YO端输出高电平,M停转,BL停止发声,汽车停止不动。
1.Rl-R9选用1/4W金属膜电阻器或碳膜电阻器。
2.Cl、C2和C5均选用耐压值为lOV的铝电解电容器;C3和C4均选用独石电容器。
电动汽车驱动电机ppt课件

26
第三章
驱动电机系统控制策略简介
驱动电机系统下电流程
27
第三章
驱动电机系统控制策略简介
驱动电机系统驱动模式
整车控制器根据车辆运行的不同情况,包括车速、挡位、电池 SOC值来决定,电机输出扭矩/功率。
当电机控制器从整车控制器处得到扭矩输出命令时,将动力电池 提供的直流电,转化成三相正弦交流电,驱动电机输出扭矩,通过机械 传输来驱动车辆。
9
第二章
驱动电机系统关键部件简介
C33DB 驱动电机控制器结构
10
第二章
驱动电机系统关键部件简介
C33DB 驱动电机控制器结构
11
第二章
驱动电机系统关键部件简介
C33DB 驱动电机控制器主要零件
12
第二章
驱动电机系统关键部件简介
C33DB驱动电机系统工作原理
在驱动电机系统中,驱动电机的输出动作主要是靠控制单元给定命令执 行,即控制器输出命令。控制器主要是将输入的直流电逆变成电压、频 率可调的三相交流电,供给配套的三相交流永磁同步电机使用。
CAN总线接口
29 CAN_SHIELD
10
TH
9
TL
电机温度传感器接口
28
屏蔽层
8
485+
7
485-
RS485总线接口
15 HVIL1(+L1) 26 HVIL2(+L2)
高低压互锁接口
19
第二章
驱动电机系统关键部件简介
检修——驱动电机控制器低压插件
建议检修时先确认插件是否连接到位,是否有“退针”现象。
20
第二章
驱动电机系统关键部件简介
检修——确认高压动力线束连接
2024版智能小车控制PPT课件

不同类型的传感器具有不同的作用原理。例如,超声波传感器通过发射超声波 并接收其反射波来测量距离;红外线传感器则利用红外线的反射或吸收特性来 检测物体;摄像头则通过捕捉图像信息来实现视觉感知。
电机驱动方式及性能比较
电机驱动方式
智能小车的电机驱动方式主要有直流电机、步进电机、伺服电机等。这些电机具有不同的特点和适用场景,需要 根据智能小车的实际需求来选择合适的电机。
要点一
深度学习在路径规划中的应用
要点二
强化学习在路径规划中的应用
随着深度学习技术的发展,越来越多的研究将深度学习技术 应用于路径规划中,通过训练神经网络模型来学习路径规划 策略,提高路径规划的智能化水平。
强化学习是一种通过与环境交互来学习策略的机器学习方法, 可以应用于路径规划中,通过不断试错来学习最优路径规划 策略。
实施效果评估
通过实际测试和数据分析,评估避障策略的实施效果,并进行优 化和改进。
06
智能小车调试与性能评估
硬件组装注意事项
选择合适的组件和配件,确保其 质量和性能符合设计要求。
按照电路图和说明书正确连接各 个模块,避免出现短路或断路现
象。
注意电源线的接线方式,确保正 负极正确连接,避免反接或虚接。
传感器数据采集与处理策略
传感器类型选择
根据智能小车功能需求,选择合适的 传感器,如超声波、红外、陀螺仪等。
数据采集与处理
设计合理的数据采集电路和信号处理 算法,提高传感器数据的准确性和稳 定性。
电机控制算法实现与优化
电机控制算法
实现基本的电机控制算法,如PID控制、 模糊控制等,确保小车能够稳定、准确地 行驶。
04
路径规划与导航技术探讨
智能小车硬件介绍PPT课件
图像传感器
② 暗电流噪声 暗电流噪声可以分为两部分:其一是耗尽层热激发产
生的,可用泊松分布描述;其二是复合产生中心非均匀 分布,特别是在某些单元位置上形成暗电流尖峰。由于 器件工作时各个信号电荷包的积分地点不同,读出路径 也不同,这些尖峰对各个电荷包贡献的电荷量不等,于 是形成很大的背景起伏,这就是常称的固定图像噪声的 起因。 ③ 转移噪声
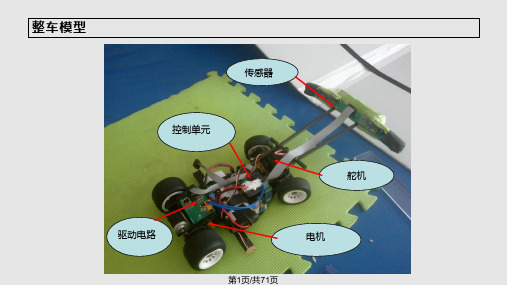
整车模型
传感器
控制单元
舵机
驱动电路
电机
第1页/共71页
第2页/共71页
智能汽车设计基础—硬件
从外观上看,智能车系统主要表现为由一系列的硬件组成,包括组成车体 的底盘、轮胎、舵机装置、马达装置、道路检测装置、测速装置和控制电路板等。 本章主要介绍智能车设计中使用到的传感器(包括光电式传感器、图像传感器和 测速传感器等)和控制电路板中的功能电路设计。
第16页/共71页
图像传感器
(2)面阵CCD图像传感器 面阵CCD图像传感器的感光单元呈二维矩阵排
列,能检测二维平面图像。由于传输与读出方式不 同,面阵图像传感器有许多类型,常见的传输方式 有行传输、帧传输和行间传输三种。
2.CCD图像传感器的特性参数 CCD图像器件的性能参数包括灵敏度、分辨率
、信噪比、光谱响应、动态范围和暗电流等,CCD
第31页/共71页
图像传感器
表2.1 常见的1/3 OmniVision CMOS摄像头的时序 参数
第32页/共71页
磁场检测传感器
根据麦克斯韦电磁场理论,交变电流会在周围产生 交变的电磁场。智能汽车竞赛使用路径导航的交流电流 频率为20kHz,产生的电磁波属于甚低频(VLF)电磁 波。甚低频频率范围处于工频和低频电磁破中间,为 3kHz~30kHz,波长为100km~10km。如下图所示 :
自动循迹小车-PPT课件
小车沿线自动行驶
• 1.智能寻迹小车的研究意义 • 2.系统模块组成结构
• 3.系统硬件设计
• 4.系统软件设计 • 5 实验测试
1.智能寻迹小车的研究意义
大家在新闻中都看到过登月小车 或者听说过无人驾驶车吧
在那些人类很难适应、或无法进入的工 作环境中,我们可以看到它们的身影。
40 39 38 37 36 35 34 33 32 31 30 29 28 27 26 25 24 23 22 21
1 0K 1 0K 1 0K 1 0K 1 0K 1 0K 1 0K 1 0K
VCC 4 7K 4 7K 4 7K 4 7K 1K
VCC
V SS RS(CS) RW( SI D ) V D D E (SCL K ) V0
1 28 6 4
从单片机
键盘
液晶显示
单片机系统电路
/RST NC VOUT LEDK LEDA
D B0 D B1 D B2 D B3 D B4 D B5 D B6 D B7 PSB
• 电源电路
• L298电机控制驱动:
小车光电采样电路
3.2 寻迹电路原理
a.采样电路原理框图
采 样 电 路 1 P 2 .7
采 样 电 路
2
P 2 .6
采 样 电 路
3
P 2 .5
采 样 电 路
4
P 2 .4
采 样 电 路
5
P 2 .3
图
7
光 电 采 样 原 理 框 图
提示
红外发射管
红外接收管
VCC
红外发射管
10K R21 8 VCC 3 U1C 4.7K R17 R18 200
智能小车设计ppt课件

开发环境
Keil uVision,Visual Studio Code等,提供代码编辑、编译、调试等功能。
库函数使用
调用开发板提供的库函数,简化编程难度,提高开发效率。
编程语言及开发环境介绍
03
处理算法
采用滤波算法、阈值判断等方法对采集的数据进行处理,以得到准确的环境信息。
01
传感器类型
红外传感器、超声波传感器、陀螺仪等,用于采集环境信息。
图像处理技术
结合智能小车设计,介绍如何利用深度学习框架实现图像处理相关任务,如路面检测、交通标志识别等。
实现案例
深度学习框架在图像处理中应用
06
CHAPTER
性能测试与评估方法
包括速度、加速度、制动距离、转向灵活性等关键指标,用于全面评估智能小车的性能。
性能测试指标
根据性能指标要求,选择合适的测试方法,如室内轨道测试、室外场地测试等,确保测试结果的准确性和可靠性。
避障策略
路径规划与导航策略编写
调试技巧及问题解决方法
硬件调试
检查电路连接是否正确,电源供电是否稳定,传感器是否工作正常等。
软件调试
采用单步调试、断点调试等方法对程序进行逐步排查,找出问题所在并进行修改。
问题解决方法
针对常见问题,如传感器失灵、小车无法直行等,提供相应的解决方法。同时,也可通过查阅相关资料、请教专业人士等方式寻求帮助。
智能小车可以作为移动医疗平台,协助医护人员进行药品配送、病人转运等工作。
智能小车可以与智能家居系统相结合,实现家庭环境的智能监控、物品搬运等功能。
智能小车可以作为教学实验平台,帮助学生进行自动控制、传感器技术等相关实验和研究。
安全性
确保智能小车在运行过程智能小车的可扩展性,方便后续功能升级和扩展。
《汽车电源系统》课件

调节器主要由触点、弹簧、电阻器和 电子元件组成。调节器通过监测发电 机输出电压,控制触点开关的通断来 调节磁场电流,从而控制发电机输出 电压在设定范围内。
充电系统的结构与原理
总结词
充电系统是汽车电源系统中用于给蓄电池充电的子系统,其结构和工作原理对于保持蓄 电池良好状态至关重要。
详细描述
充电系统主要由充电线、充电指示灯和充电插座等组成。当发动机运转时,发电机产生 电流并通过充电线给蓄电池充电。充电指示灯用于指示充电状态,当充电完成后指示灯
无线充电技术
总结词
无线充电技术是一种无需插线、无需接触的 充电方式,通过磁场将电能从充电设备传输 到接收设备。
详细描述
无线充电技术具有方便、安全、高效等优点 ,可以解决传统有线充电方式存在的各种问 题,如插口损坏、线缆混乱等。目前,无线 充电技术已经在手机、智能手表等消费电子 产品中得到广泛应用,未来有望在汽车领域 得到广泛应用。
《汽车电源系统》车电源系统概述 • 汽车电源系统的结构与原理 • 汽车电源系统的维护与保养 • 汽车电源系统常见故障诊断与排除 • 汽车电源系统新技术与发展趋势
01 汽车电源系统概述
汽车电源系统的定义与组成
总结词
基本构成与功能
详细描述
汽车电源系统是汽车电气系统的核心组成部分,主要负责提供和调节电能,为 汽车所有用电设备提供稳定的电力。它通常由蓄电池、发电机、调节器和其他 相关电路组成。
熄灭。
03 汽车电源系统的维护与保 养
汽车蓄电池的维护与保养
蓄电池的定期检查
蓄电池的正负极连接
检查蓄电池的外观、电解液的液位和 浓度,确保蓄电池没有泄漏或损坏。
定期检查蓄电池的正负极连接,确保 连接紧固,防止因接触不良引起的故 障。
智能车入门PPT课件
智能汽车电源研究
• 目前,车载动力电源的弊端是容量偏小、功率较低、持续稳定工作时间短,国内外不少学者对此进行了大 量研究,智能汽车作为新一代汽车的代表,为应对日益严重的环境问题,必须采用电能作为动力。但至目 前为止,智能汽车动力电源仍是一个有待突破的技术关键。
第16页/共86页
1.2 国外智能汽车设计竞赛
第12页/共86页
智能汽车的信息采集与处理技术
• 汽车在行驶过程中,必须得到的信息包括车辆自身状况的信息、道路信息、近邻行驶汽车的信息及导航定 位信息等。这些信息一般被外界噪声所干扰,如何精确、实时、有效地采集到这些信息,并进行处理,需 要特别研究。
第13页/共86页
智能汽车控制策略的设计
• 目前,在智能控制领域内,已经提出了模糊控制理论、神经控制理论、专家控制理论、分层递阶控制理论 等智能控制方案。所有这些智能控制策略,其核心思想就是模仿人的思维和行动,去完成或部分完成只有 人类专家才能完成的控制任务。设计一个“类人”的汽车控制器,是智能汽车控制策略研究中的终极方案。 但由于汽车驾驶任务的复杂性,研究设计这种汽车智能控制器的任务是十分艰巨的。
第14页/共86页
智能汽车导驶定位技术
• 智能汽车作为一种自动或半自动交通工具系统,如何选择交通路线、如何识别道路、如何精确实时地确定 自己的地理位置、如何记录自己的行车路线等问题,是当前研究的技术热点,而数字导驶技术就是解决这 些问题的综合方案。从硬件上讲,车载计算机、控制器、显示器、数字地图、定位系统是必不可少的。车 辆数字导驶技术研究已经取得了一些结果,但是要完全彻底地解决问题,还需要做很多研究。
第18页/共86页
1.2.1 美国智能汽车大赛
• 这次智能汽车比赛的目标是对未来科学家的激励。大学、企业和发明家们期望 制造出通过洛杉矶和拉斯维加斯间荒地、行程100 mile(160 km)的自我控 制汽车。
《智能车电源设计》课件

智能车电源设计是一项重要且挑战性的任务。本课程将介绍研究背景、传统 设计问题和智能电源设计原理。
研究背景及意义
随着智能车的兴起,电源系统设计变得越来越重要。我们将探讨为智能车设 计高效安全的电源系统的意义。
传统电源设计存在的问题
1 低效率
传统设计过程中,电源系统效率低下,无法满足智能车的高功耗需求。
多路输出设计实例
展示多个智能电源输出的设 计实例,满足智能车多种电 源需求。
充电控制电路
介绍充电控制电路的设计原 则,确保电池安全充电。
实验及结果分析
1
基于实际智能车电源实验
通过实验验证智能电源设计的可行性和性能表现。
2
实验结果及分析
分析实验结果,探讨智能电源设计的优点和改进方向。
3
多方案比较
比较不同智能电源设计方案的性能和可行性。
总结与展望
智能电源设计在提高智能车性能和安全性方面具有巨大优越性。展望未来,我们将探索更先进的电源设计方法 和技术。
参考文献
[1] 张三,李四,王五(2020)《智能车电源设计原理》,科学出版社 [2] Smith, J. (2018). "Advanced Power Supply Design for Smart Cars." International Journal of Smart Car Engineering, 15(2), 123-145.
2 大功率损耗
高功耗带来的大功率损耗是智能车电源设计的一个关键问题。
3 安全隐患
传统设计容易出现安全隐患,例如过热、过载等问题。
智能电源设计原理
智能电源设计原理包括电源控制器、多路输出设计和充电控制,这些原理可以帮助解决传统设计存在的问题。
智能小车模块概述

• 任务分解:
1、智能小车驱动板电路设计、电路焊接与编程调试(5月6日-23日) 电路设计:5月6日-9日,5月10日集中辅导时提交设计报告 电路焊接:5月10日-13日,完成电路板焊接,5月13日验收 编程:5月14日-17日,完成程序编写,5月17日验收 调试:5月18日-22日,完成小车调试,5月22日验收 提交第一阶段实验报告:5月23日
电源管理:
电 池 电 压 7.2 伏
6伏,舵机驱动 5伏,芯片供电 3.3伏,传感器供电
能源效率?
LDO为主流
驱动电路: 相当于汽车排量
15:53:46
中北大学仪器与电子学院智能小车实践模块
内容
1、智能小车关键技术介绍 2、MPU6050及信号处理技术 3、智能小车的控制
中北大学仪器与电子学院智能小车实践模块
框架式思维
MCU控制核心 传感器 硬件 上位机通信 电源电路 驱动电路
15:53:45
中北大学仪器与电子学院智能小车实践模块
基本控制算法框图
15:53:45
中北大学仪器与电子学院智能小车实践模块
基本硬件参考方案
15:53:45
中北大学仪器与电子学院智能小车实践模块
如何让小车奔驰在跑道上
二、软件控制
如转向与速度
Matlab模糊工具箱
利用设计模糊控制文件建立 Simulink模型,仿真后在 ARM-Cortex环境下生成C 语言嵌入式代码。
15:53:46
中北大学仪器与电子学院智能小车实践模块
15:53:46
中北大学仪器与电子学院智能小车实践模块
j 0
模糊控制算法
随着智能车竞赛的发展,竞赛对车模速度、 稳定性、灵活性有了更高的要求。单纯的 PID算法很难满足更高的标准。基于模糊控 制、单神经元控制改进型的PID算法得以应 用。
智能小车电路原理 ppt课件

(六)单片机最小系统
1.复位电路与时钟电路
2.数码管显示
数码管显示 P2
静态显示,写出显示段码?
(六)蜂鸣器与按键
蜂鸣器
按键
P0.6
P3.2
P3.4
有障碍物 INA = 0 无障碍物 INA = 1
P3.7=0 P3.7=1
(三)循迹电路
P3.5
P3.6
循迹模块
小车头 底部视图
白线 黑线
V2通 V2断
P3.5=0 P3.5=1
(四)蓝牙遥控
蓝牙接收模块硬件
HC-06 无线蓝牙串口透传模块 无线串口通讯 HC-06从机模块
(五)寻光模块
光敏电阻采集光信号,转换为电阻的变化,经与电路中的电阻串联,又转 化为电压的变化,与参考电压比较,得到一开关量。
智能小车
智能小车培训项目日程安排
时间 7.11上午
7.12 7.13~14 7.15~16 7.17上午 7.17下午
培训内容 方案与原理介绍 电路安装、小车装配、电路调试 原理图与PCB图绘制
软件设计 产品功能测试 设计报告撰写
组建学习团队:
一、设计任务
设计、制作、安装、调试一款智能小车,实现循迹、( 红外)避障、遥控、寻光等功能。
二、方案选择
1、循迹方案 方案一:用光敏电阻构成光敏探测器; 方案二:用红外发射管和接收管自己制作光电对管寻迹传感器; 方案三:用RPR220型光电对管。
2、避障: 红外传感器、超声传感器
3、遥控: 红外遥控、蓝牙遥控
4、寻光: 光敏电阻、红外对管
5、处理器:
电路框图
避障 模块
循迹 模块
处
遥控
模块
智能车各模块硬件电路及其原理的详细
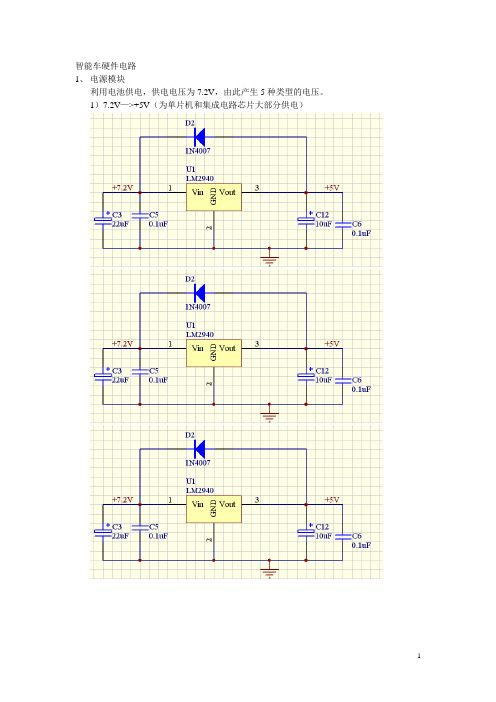
智能车硬件电路1、电源模块利用电池供电,供电电压为7.2V,由此产生5种类型的电压。
1)7.2V—>+5V(为单片机和集成电路芯片大部分供电)2)+5V—>3.3V(为SPI供电)3)±5V—>±12V(为CCD供电)4)+7.2V—>6.4V(为舵机供电)5)+5V—>-5V (为集成运放供电)2、霍尔测速模块3、电机驱动模块4、路径检测模块1)基于CCD的路径检测视频信号分离部分JK触发器实现行采样移位锁存环境检测得到基准电压(Dac0832部分)环境检测得到基准电压(比较器输出,二值化部分)2)基于光电的路径检测5、单片机控制模块1)电机驱动部分PWM6 刹车制动PWM7 方向输出(电机驱动)2)舵机控制部分PWM0和PWM1级联,输出频率为50Hz 的脉宽信号用于舵机的方向控制3)CCD检测路径部分PWM2 1MHz的行值采样信号PT0 上升沿启动场频中断PB2 高电平启动行采样,下降沿锁存行信息PB1 启动移位读入行信息PB0 行信息输入位PB3 DAC0832 输出控制信号4)光电检测输入部分利用ATD0和ATD1共同进行16路A/D转换获得路径信息5)速度检测部分由PT1 采用输入捕获方式进行速度检测。
6)无线通信模块负责传递速度、路径等信息给上位机进行分析,可以进行整车调试等工作7)环境检测部分利用ATD0的AN0对环境信息进行转换,通过滤波的方式求得环境的信息,并将其转换成数字量通过PA口输出至DAC0832,同时利用PB3 启动D/A转换,获得二值化处理的基准电压。