【PPT_FVEH_1.0】SIMDRIVE背景介绍
系统动力学及Vensim建模与模拟技术ppt课件

Vensim软件开发于1988年 1993年Vensim 1.50为一个稳定版本 Vensim 1.62 发布于1995 Vensim 3.0发布于1997 Vensim 4发布于1999 Vensim 4.1,4.2发布于2000 Vensim 5发布于2002. Vensim 5.3发布于2004 Vensim 5.5发布于2005 Vensim 5.6发布于2006 Vensim 5.7a发布于2008
(8)复杂系统及行为 复杂系统分析方法 基模与共性结构
Page 3
(9) Vensim高级建模与模拟技术 敏感性测试 模型刻度与政策最优化 真实性检验 模型发布 Vensim其他高级功能简介
(10)建模互动交流 牛鞭效应
3
系统动力学简介
Page 4
系统动力学发展历史 系统动力学主要应用领域 系统动力学基本观点 系统动力学学科基础 系统动力学建模基本过程
i 1,2,, p
Si——代表子系统,
Page 16
16
系统动力学数学描述
数学描述如下:
·
L PR
式中:
R A
W
L A
L——状态变量向量;
R——速率变量向量;
A——辅助变量向量;
L——纯速率变量向量;
P——转移矩阵;
W——关系矩阵。
17
Page 17
系统动力学的系统(System)观点基础
(1)系统动力学简介 系统动力学发展历史 系统动力学主要应用领域 系统动力学学科基础 系统动力学建模基本过程
(2)Vensim 软件简介 软件配置 基本功能 用户界面 模型库及辅助知识
vensim案例分析精品PPT课件精选全文完整版
1.系统动力学发展历程
❖ J.W.Forrester等教授在系统动力学的主要成果: ❖ 1958年发表著名论文《工业动力学——决策的一个重要突
破口》,首次介绍工业动力学的概念与方法。 ❖ 1961年出版《工业动力学》(Industrial Dynamics)一书,
该书代表了系统动力学的早期成果。 ❖ 1968年出版《系统原理》(Principles of Systems)一书,
2.系统动力学的原理
系统动力学是一门分析研究信息反馈系统的学科。它 是系统科学中的一个分支,是跨越自然科学和社会科学的 横向学科。
系统动力学基于系统论,吸收控制论、信息论的精髓, 是一门认识系统问题和解决系统问题交叉、综合性的新学 科。
从系统方法论来说,系统动力学的方法是结构方法、 功能方法和历史方法的统一。
论述了系统动力学的基本原理和方法。 ❖ 1969年出版《城市动力学》(Urban Dynamics),研究波
士顿市的各种问题。 ❖ 1971年进一步把研究对象扩大到世界范围,出版《世界动
力学》(World Dynamics)一书,提出了“世界模型II”。
1.系统动力学发展历程
1972年他的学生梅多斯教授等出版了《增长的极限》 (The Limits to Growth)一书,提出了更为细致的“世界模 型III”。这个由罗马俱乐部主持的世界模型的研究报告已被 翻译成34种语言,在世界上发行了600多万册。两个世界 模型在国际上引起强烈的反响。
LOGO
系统动力学
System Dynamics
2009.10.31
Contents
1
系统动力学发展历程
2Leabharlann 系统动力学的原理3系统动力学基本概念
Matlab简介PPT课件

矩阵运算与线性代
03
数应用
矩阵创建和操作方法介绍
01
直接输入法
通过直接输入矩阵元素来创建矩阵,例如`A = [1 2 3; 4 5 6; 7 8 9]`。
02
函数生成法
利用Matlab内置函数生成特定矩阵,如`zeros()`生成全零矩阵,
`ones()`生成全一矩阵,`eye()`生成单位矩阵等。
错误处理方法
根据错误信息提示,检查代码相关部分, 修正错误;对于复杂问题,可采用逐步缩 小范围的方法进行排查。
综合性程序设计案例剖析
案例选择
挑选具有代表性的综合性程序设计案例 ,如数值计算、信号处理、图像处理等
。
代码实现
详细讲解案例的代码实现过程,包括 算法设计、数据结构选择、函数编写
等。
案例分析
Matlab实现
使用Matlab内置函数进行最优化问题求解,如`fmincon`、`ga`等。
偏微分方程数值解法
01
偏微分方程基本概 念
包含未知函数及其偏导数的方程 。
02
偏微分方程数值解 法
有限差分法、有限元法、谱方法 等。
03
Matlab实现
使用Matlab内置函数或工具箱进 行偏微分方程数值求解,如PDE Toolbox等。
分析案例涉及的知识点、难点及解决 方案,引导学生深入理解并掌握相关 知识。
结果展示与讨论
展示案例运行结果,并引导学生进行 讨论,分析程序优缺点及改进方向。
课程设计或项目实践指导
选题建议
根据学生兴趣和专业背景,提供课程设计或项目实践的选题建议,如 控制系统设计、信号处理应用等。
实践指导
指导学生进行需求分析、方案设计、代码编写、测试调试等实践环节 ,培养学生解决实际问题的能力。
CarSim介绍PPT课件

制动性与平顺性等),总结同类车型的优缺点, 并提控软制件出策在一略环的个开更发与具有竞争力的整车设计零架部实目件验标样及件硬。试件制在与环台Leabharlann 确定总体设计方案.
19
子系统与零部件的设计指标
整车及系统的设计目标
子系统与零部件的 设计指标
部件组装与样车 路面试验
.
11
车辆模型的简化
刚体
簧载质量 非簧载质量 车轮 发动机 总数
自由度
1
簧载质量的移动自由度 (X,Y,Z) 3
4
簧载质量的转动自由度(X,Y,Z) 3
4
非簧载质量自由度
4
1
车轮旋转自由度
4
10 传动系旋转自由度
1
轮胎瞬态特性自由度
8
制动压力自由度
4
总数
27
.
12
Simulink/LabVIEW
量产
根据整车性能指标,可以在CarSim中选择不同性能 的各主要部件(发动机、悬架总成布置、车身外形尺 寸控软等制件)策在进略环行的开整发车与 仿真试验,从中确定零架各部实件验子样及系件硬试件统制在与与环台零部 件的设计指标。
确定总体设计方案
.
20
控制策略的开发与软件在环
整车及系统的设计目标
量产
CarSim可以很方便的与Ma部t件la组b装/S与i样m车ulink连接进行 联合仿真。因此在控制策略路的面试开验发阶段就可以把 Matlab/Sim子设u系计l统指in与标k零开部件发的的控制策略与CarSim的整车模
子系统与零部件的 设计指标
部件组装与样车 路面试验
量产
控制策略的开发与 软件在环
车辆系统仿真课件PPT(MATLAB精选课程、优质学习资料)汽车制动、悬架、四轮转向控制系统仿真

Fz1
Mvxh Mgb 2L
F0h
Mvyh 2C
Fz
2
Mvxh Mgb 2L
F0h
Mvyh 2C
Fz
3
Mvxh Mga 2L
F0h
Mvyh 2C
Fz 4
Mvxh Mga 2L
F0h
Mvyh 2C
考虑轮胎受到侧向力的作用,采用Gim模型对汽车制动系统进行仿真设 计,其侧向力和回转力矩分别如下式所示:
由此建立单轮车辆制动模型的微分方程式:
mu F Fb
J
Fbr
Tb
Fb
Fz
制动过程仿真模型参数如表14-1所示。
建立汽车单轮制动模型仿真框图如图14-3所示。
模型根据不同滑移率下的地面附着系数得到相应的汽车的加速度,积分后与初 始化车速得到相应的车速,运行仿真文件输出结果如图14-4~图14-7所示。
车辆系统仿真
本章讲述了汽车系统仿真,主要设计有汽车制动系统 仿真,汽车悬架的仿真,包括汽车悬架系统的方程建 立、汽车悬架系统仿真以及白噪声路面模拟输入仿真 等,汽车四轮转向系统仿真,分别考虑在低速和高速 运行情况下的四轮系统仿真,很好的解释了汽车系统 建模分析仿真,使读者了解和掌握汽车系统建模,挖 掘更深层本质。 学习目标: (1)学习和掌握汽车制动系统仿真; (2)学习和掌握汽车悬架的仿真; (3)学习和掌握汽车四轮转向系统仿真。
尤为必要。 选取三个性能指标: 车身加速度: y1 xs x2 悬架动扰度: y2 xs xt x1
轮胎动变形: y3 xr xt x3
于是得到输出方程为: Y CX
ks / ms cs / ms 0 cs / ms
C
1
0
自动驾驶介绍ppt课件

智能汽车
————自动驾驶
自动驾驶汽车概括
自动驾驶汽车(Self-driving car),又称无人驾驶汽 车、电脑驾驶汽车、或轮式移动机器人,是一种通过电 脑系统实现无人驾驶的智能汽车。
分类
驾驶辅助系统 部分自动化系统 高度自动化系统 完全自动化系统
1、驾驶辅助系统(DAS):
目的是为驾驶者提供协助,包括提供重要或有益的驾驶相关信息, 以及在形势开始变得危急的时候发出明确而简洁的警告。
2、部分自动化系统:
在驾驶者收到警告却未能及时采取相应行动时能够自动进行干预的 系统。
3、高度自动化系统:
左后轮传感器
很多人第一眼会 觉得这个像是方 向控制设备,而 事实上这是自动 驾驶汽车的位置 传感器,它通过 测定汽车的横向 移动来帮助电脑 给汽车定位,确
自动驾驶汽车 前置摄像头谷 歌在汽车的后 视镜附近安置 了一个摄像头 ,用于识别交 通信号灯,并 在车载电脑的 辅助下辨别移 动的物体,比 如前方车辆、 自行车或是行 人。
前后雷达:后车厢
的主控电脑谷歌在无人 驾车汽车上分别安装了 4个雷达传感器(前方3 个,后方1个),用于 测量汽车与前(和前置 摄像头一同配合测量) 后左右各个物体间的距 离
前雷达 后雷达
研究意义
减少交通事故
提高运输效率
完成特殊作业
国防军事应用
激光雷达
车顶的“水桶”形 装置是自动驾驶汽 车的激光雷达,它 能对半径60米的周 围环境进行扫描, 并将结果以3D地图 的方式呈现出来, 给予计算机最初步 的判断依据。
SIMDRIVE 3D 前端简介
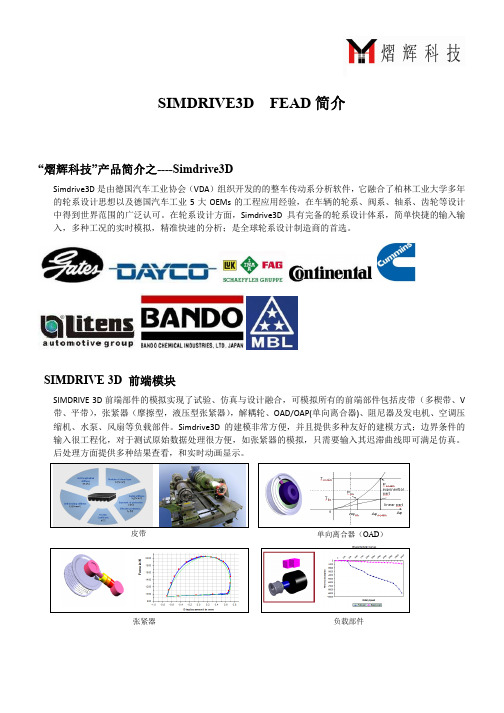
SIMDRIVE3D FEAD 简介“熠辉科技”产品简介之----Simdrive3DSimdrive3D 是由德国汽车工业协会(VDA )组织开发的的整车传动系分析软件,它融合了柏林工业大学多年的轮系设计思想以及德国汽车工业5大OEMs 的工程应用经验,在车辆的轮系、阀系、轴系、齿轮等设计中得到世界范围的广泛认可。
在轮系设计方面,Simdrive3D 具有完备的轮系设计体系,简单快捷的输入输入,多种工况的实时模拟,精准快速的分析;是全球轮系设计制造商的首选。
SIMDRIVE 3D 前端模块SIMDRIVE 3D 前端部件的模拟实现了试验、仿真与设计融合,可模拟所有的前端部件包括皮带(多楔带、V 带、平带),张紧器(摩擦型,液压型张紧器),解耦轮、OAD/OAP(单向离合器)、阻尼器及发电机、空调压缩机、水泵、风扇等负载部件。
Simdrive3D 的建模非常方便,并且提供多种友好的建模方式;边界条件的输入很工程化,对于测试原始数据处理很方便,如张紧器的模拟,只需要输入其迟滞曲线即可满足仿真。
后处理方面提供多种结果查看,和实时动画显示。
皮带 单向离合器(OAD )张紧器 负载部件SIMDRIVE 3D 前端模块技术应用基础应用:前端轮系布置,动态包角,皮带动态力,带轮间相对滑移,皮带横向振动、张紧轮抖动、轴荷载等 深入应用:皮带寿命分析、轴寿命分析,功率损失分析,TVD 设计,噪声研究新技术应用:新型零部件应用(例如OAD 的应用等),BAS 、启停技术功率损失分析皮带寿命分析SIMDRIVE 3D 将传动过程中的功率损失细分为了弯曲、径向压缩 simdrive 3d 提供了便捷的皮带寿命仿真工具, 拉伸、滑移剪切及张紧系统与皮带的振动等损失。
以便更好的分析可进行不同工况的寿命模拟传动过程中的功率损失问题。
多转速工况分析应用NEDC 工况 NEDC 工况转速分布Simdrive 3d 中提供了通过转速分布定义多转速工况的功能,如定义NEDC 工况,可通过NEDC 工况功率损失计算油耗。
第5章-动力传动系统仿真-3资料

peakNormForce = 16000;
coeffFricTable = [0 1.31; 22.7 1.47; 30.3 1.5; 400.0 1.59];
staticFricPeak = 1.1;
clutchPressThresh = 0.1;
velTol = 1e-3; %换挡离合器同步阈值
Output
Output
Sun Inertia
Planetary Gear
四、变速机构模型
3.换挡离合器模型 1)压紧力变化规律的传递
From模块
Simulink中signal Routing:
•From模块
•Goto模块 •Demux模块
Goto模块
Demux模块
四、变速机构模型
3.换挡离合器模型 2)离合器A和离合器D
Clutch B l o o ku p
Clutch C l o o ku p
Clutch D l o o ku p
Clutch R l o o ku p
1 cl u tch Ri se .s+1
A
1 cl u tch Ri se .s+1
B
1 cl u tch Ri se .s+1
C
1 cl u tch Ri se .s+1
第5章 动力传动系统仿真
——SimDriveLine对动力传动系统仿真
章节概览
3.1 部件模型 3.2 系统模型及仿真
仿真对象和仿真内容
1.仿真对象
+ 发动机
带闭锁离合 器的变矩器
+
四前一倒行 星变速器
+
主减 速器
+
SimoDrive611Ue伺服模块驱动的使用PPT课件

!
根据总线设备调整终端电阻开关的位置
第25页/共57页
系统的连接 – PROFIBUS总线连接
ON OF F
A1 B1
A2 B2
O OF NF
A1 B1
A2 B2
ON OF F
A1 B1
ON OF F
A1 B1
A2 B2
A2 B2
Exchange X333 X222 X111
802D PCU
X423
EA 831
在611UE模块的液晶显示窗口上, 显示 “A831” – 表示驱动器找 不到总线主设备(既802D没有 访问该驱动器)
第32页/共57页
802D参数的保护级、口令及生效条件
802系统的保护级:
1. 专家级(口令:SUNRISE )- 只有在必要时使用 2. 制造商级(口令:EVENING )- 更改标准机床参数 3. 用户级(口令:CUSTOMER)- 浏览机床参数但不能修
功能选择窗口 给定速度
编码器型号 实际速度
控制端子状态
实际电流
按F1键启动在线帮助
第30页/共57页
选择监控其他状态
611UE驱动器的基本参数配置
第31页/共57页
611UE驱动器的基本参数配置
驱动器设定后的状态:
参数设定完毕后,在611UE模块 上,标有R/F的红色指示灯熄灭
X423
在611UE模块上,总线选件模块 上的双色指示灯为红色 – 表示总 线上无数据交换。
第35页/共57页
802D参数设定 – 驱动器模块定位
驱动器模块定位轴参数,是802D系统确定驱动器模块位置的路标: MD30110 – 该轴的速度给定值应发送到轴号指定驱动器模块 MD30220 – 该轴的位置测量信号应来自轴号所指定驱动器模块
一Matlab简介与安装ppt课件

Matlab 的安装
购买(下载)Matlab 软件 插入光盘,自动运行; 或点击安装程序 setup.exe
Matlab 的特点与功能
Matlab 是一个交互式软件系统
输入一条命令,立即就可以得出该命令的结果
Matlab 具有很强的数值计算功能
✓ Matlab 以矩阵作为数据操作的基本单位,但无需预先指定 矩阵维数(动态定维)
✓ 按照 IEEE 的数值计算标准进行计算 ✓ 提供十分丰富的数值计算函数,方便计算,提高效率 ✓ Matlab 命令与数学中的符号、公式非常接近,可读性强,
容易掌握
Matlab 的特点与功能
Matlab 符号计算功能
Matlab 和著名的符号计算语言 Maple 相结合
Matlab 的绘图功能
存储指定的变量
save 文件名 变量名列表 变量名列表中各变量之间用空格分隔。 例:>> save mydata A x z
变量的读取
将数据文件中的变量载入当前工作空间
load mydata 载入数据文件中的所有变量 load mydata A x 从数据文件中提取指定变量
清除当前工作空间中的变量
长格式,双精度数15位,单精度数7位 3.14159265358979
format short e 短格式e方式(科学计数格式)
3.1416e+000
format long e 长格式e方式
3.141592653589793e+000
format short g 短格式g方式
3.1416
format long g format compact format loose
Matlab 中数的输出格式可以通过 format 命令指定
《启帆工业机器人》课件

传感器技术:采用 高精度传感器,能 够实时监测和控制 机器人动作
通信技术:采用先 进的通信技术,能 够实现机器人与外 部设备的实时通信 和协同工作
感知与识别技术
语音识别:通过麦克风捕捉 声音,识别语音指令、语音 命令等
视觉识别:通过摄像头捕捉 图像,识别物体、颜色、形 状等特征
触觉识别:通过传感器捕捉 触觉信息,识别物体材质、
启帆工业机器人在物 流行业的应用:启帆 工业机器人在物流行 业的应用包括仓储、 分拣、配送等环节
应用效果:启帆工业 机器人在物流行业的 应用提高了工作效率 ,降低了人工成本, 提高了物流行业的智 能化水平
案例展示:展示启帆 工业机器人在物流行 业的实际应用案例, 如仓储机器人、分拣 机器人等
案例四:医疗行业应用
启帆工业机器人在医疗行业 的应用
机器人在医疗行业的优势
启帆工业机器人在医疗行业 的成功案例
启帆工业机器人在医疗行业 的未来发展趋势
07
启帆工业机器人 的挑战与对策
技术瓶颈与突破
技术瓶颈:机器人成本高, 难以大规模推广
技术瓶颈:机器人智能化程 度低,无法适应复杂环境
技术突破:研发智能机器人, 提高智能化程度
精确度高:减少 误差,提高产品 质量
生产速度快:缩 短生产周期,提 高生产效率
适应性强:适用 于多种生产环境, 提高生产效率
降低生产成本
自动化生产:减 少人工成本,提 高生产效率
精确控制:减少 材料浪费,降低 生产成本
提高产品质量: 减少返工和维修 成本
提高生产灵活性: 适应不同产品需 求,降低生产成 本
求
竞争格局与发展趋势
市场竞争激烈,国内外品牌众多 发展趋势:智能化、自动化、柔性化 市场需求:制造业转型升级,对工业机器人的需求日益增长 技术挑战:需要不断研发创新,提高产品质量和性能,降低成本
SIMOVERT MASTERDRIVES VC Compact PLUS 微型驱动器系列说明书

The proven MASTERDRIVES VC series with optimized power density.The Compact PLUS design is ideally suited for applications where space is at a premium.MASTERDRIVES VC Compact PLUS drives together with the 1PH7 or1LA5/1LA7 series motors form a perfectly harmonized drive system.SIMOVERTMASTERDRIVES VCCompact PLUSThe Compact PLUS design is the newestmember of the SIMOVERT MASTER-DRIVES VC (Vector Control) family andcompliments the spectrum in the lowerpower range. The SIMOVERT MASTER-DRIVES VC power spectrum now spansfrom 0.55 kW to 2300 kW. The CompactPLUS series covers the power rangefrom 0.55 kW to 18.5 kW. Larger powerratings are available in the form of com-pact, chassis and cabinet series units.3-ph. 380–480 V3-ph. 200–230 V3-ph. 380–480 V3-ph. 500–600 V3-ph. 200–230 V3-ph. 380–480 V3-ph. 500–600 V3-ph. 660–690 VSIMOVERT MASTERDRIVES VC is theoptimal drive solution for applicationswhich place high demands on reliabilityand control performance. MASTER-DRIVES VC Compact PLUS are the idealdrives for applications in the textile,packaging and printing industries as wellas in plastics processing and manufac-turing.2CHASSIS22–23kWCOMPACT2.2–37kW1-ph. 380–480 V3-ph. 500–600 V3-ph. 660–690 VCABINET45–15kWCOMPACTPL55185SIMOVERTMASTERDRIVES VC Compact PLUSMulti-motor drive systems may be im-plemented with minimal wiring require-ments using Compact PLUS inverters and rectifier units:The DC link connections are realised using tinned copper bus-bars to DIN 46 433(E-Cu 3 x 10) which are simply inserted into the terminals located on the upper side of the drives. Electrical contact is maintained via spring contacts avoiding the need for tightening screw terminals.The electronics of the rectifier and inver-ter units need only be supplied via an external 24 V auxiliary power supply and the multi-motor drive system is ready for operation.D U L ESystem components may be used to expand the Compact PLUS drive system – also at a later date.Energy may be stored for short periods of time using the capacitor module .The DC link module is used for making the connection between cop-per bus-bar and wired DC links, e.g.for connecting other SIMOVERT MASTERDRIVES series components such as AFE compact rectifier units to the DC link of the Compact PLUS series.Converters may be used for both single and multi-motor drive pact PLUS converters may also be used to supply additional inverters with power and are therefore ideally suited for smaller multi-motor drive systems.The converter is used to supply the in-verters with both power and 24 V DC.C A P A C I T O R M OD U L ED A 65-5964==M =M =M ...InverterRectifier unitBraking resistor Commutating reactorRFI filter=24 V DCPower supply 24 V DCX9X100X100X100X1003AC 380 - 480 V DA65-59673~3~3~~~~~~RFI filter Commutating reactor 3AC 380 - 480 V RFI filter Commutating reactor3AC 380 - 480 VSIMOVERT MASTERDRIVES VC Compact PLUSThe converter has an integrated braking chopper. Only an external braking resistor is required to dissipate the braking energy generated during generative operation. Within the compact PLUS series, addi-tional inverters may be connected to a converter unit via the DC link bus. The sum of the nominal power ratings of the connected inverters may equal the nominal power rating of the converter,e.g. a 5.5 kW converter may supply a4 kW inverter and additionally two0.75 kW inverters.A switched mode power supply is used to supply the converter control electro-nics from the DC link. The control elec-tronics may also be supplied externally using a 24 V DC power supply connected to terminals X9, e.g. in order to maintain communication with a higher level con-trol system when the power section is switched off (DC link is discharged). The switched mode power supply of a converter is also capable of supplying the control electronics of an additional two inverters with the necessary power. The control electronics of an inverter unit must always be supplied externally with 24 V DC power via the X100 termi-nals. The location of the X100 terminalsis always identical enabling the 24 V DC power supply to be wired easily.Unit OptionsSafe STOP (K80)With appropriate external components, unexpected starting of the drive toEN954-1 Safety Category 3 may beprevented. This option is available forall inverters and for converters from5.5 kW nominal power rating.Operation with non-earthedsupplies (L20)Converters without radio-interferencesuppression capacitors, enabling connec-tion to IT-supply networks.Notice:Rectifier units and inverters are suitable for connection to IT-supply networks as standard.The control electronics are alwaysearthed (PELV circuit).4U2V2W2P24P15DCM3~ X100X53312433334P24VM24DA65-5976ASICwithtrigger logicK1Safety relayVoltage adaptationControl electronics24 V DCSupplyOptionK80C o n v e r t e rI n v e r t e rw i t h“S a f e S T O P”O p t i o nU2V2W2M3~ X100123334P24VM24X9U1V1W1D C G HDA65-5975AVoltage adaptactionControl electronics24 V DCOutput24 V DCSupplySwitched-modepower supplyBraking resistor(external)SBP•Evaluation of an external encoder or frequency generator, e.g. setpoint signal•HTL or TTL level selectableNotice:All units have a HTL motor encoder input as standard.5MASTERDRIVES VC Compact PLUSCBP2•Communication via PROFIBUS-DP •The CBP2 board supports PROFIBUS Profile V3 (direct communication,acyclical communication with Master Class II)CBC•Communication via CAN Bus •The CBC board supports CAN levels 1 and 2SLB•Fast communication between the drives via the SIMOLINK bus(fiber-optic cable) with a maximum of 201 nodesCOMMUNICATION BOARDSOption Boards for the Available Option Board Slots (Slots A and B):EB1•4 bidirectional digital inputs/outputs •3 digital inputs •2 analog outputs •3 analog inputs EB2•3 relay outputs with make contacts •1 relay output with change-over contact •2 digital inputs •1 analog output •1 anlaog inputTERMINAL EXPANSION BOARDSPULSE ENCODER EVALUATIONThe units are available with the requiredoption boards factory fitted using the option codes. A maximum of 2 option boards may be installed.For a detailed description of the option boards, please refer to Catalog DA 65.10SIMOVERT MASTERDRIVES VC, Chap-ter 6.Option Option Board Code Board Slot A Slot B CBP2G91G92CBC G21G22SLB G41G42EB1G61G62EB2G71G72SBPC11C12S l o t AS l o t BMASTERDRIVES VC Compact PLUSThe control structure of the SIMOVERT MASTERDRIVES VC is initially set in the factory and maybe selected via parameter, e.g. V/f control, field oriented frequency control.Additionally, signals may be picked-off and injected at given points. Soft-ware defined connections may be severed and new connections made. All possible thanks to BICO Tech-nology.With its free function blocks the SIMOVERT MASTERDRIVES VC is in the position to carry out simple PLC (programmable logic controller) functions. BICO Technology enables the free function blocks to be freely configured.6Available as free function blocksare, for example:•fixed setpoints•fault and alarm signal blocks•arithmetic and control blocks•logic blocks•timers•counters•ramp-function generator•wobble generator•technology controllerUsing BICO Technology, flexible drivesolutions for all applications may becreated.With SIMOVERT MASTERDRIVES VCsimple technology functions throughto complex applications, e.g. winders,may be realised.Doing away with external PLCcomponents saves space and re-duces both engineering time andcosts.Function diagram87654321fp_vc_360_e.vsdSpeed controllerMASTERDRIVES VC09.04.98Speed control, master drive- 360 -smooth n/f(set)0...2000 msP221.M (4)KK0150n/f(set)n/f(set,smo'd)r229P241.B (0)KSrcSetV n/f-Reg1P242.B (0)BSrc Set n/f-Reg1P243.B (0)BSrc nf-Reg1 STOPKp TnLimitation active from torque limit,stop I component when torque limits of the unithave been reached;Limit I component to torque limitsK0153T(set, n/f Reg)T(set,reg. off)r255K0154n/f (Reg,P)K0155n/f(Reg,I-Comp)P254.M (50.0)5.0...200.0 HzResonFreqBStopFilter bandwidth0.5...20.0 HzP253.M (0.5)Band-Stop Gain0.0...150.0P251.M (0.0)n/f Reg Time25...32001 msP240.M (400)P233.M (0.0)0.0...200.0 %n/f Reg. Adapt.1P234.M (100.0)0.0...200.0 %n/f-Reg. Adapt.2n/f-Reg. Gain20.0...2000.0P236.M (10.0)n/f-Reg Gain 10.0...2000.0P235.M (~)n/f RegGain(act)r237P232.B (0)KSrc n/f RegAdaptKK0152n/f Deviation+–>0.0%=0.0 %Scale T(Pre)[ 317.7]KK0158n/f(Band-Stop)T3 = 8 xT0B0229Set I Comp act.Smooth n/f(act)0...2000 msP223.M (~)n/f(act,smo'd)r230KK0151n/f(act,smo´d)xyMotor #PolePairs1 (15)P109.M (~)n (act)r219xyn/f(act)r218KK0148n/f(act)To torque pre-control [365.6]From speedprocessing[350.8]Is only calculated if P260 or P262are not connected in diagram 375From setpoint channel[319.8], [329.8]From control word 2 bit 25 [190.5]r014Setp SpeedK0156n/f RegGain(act)B0228n/f-Reg.StopP238.B (1)KSrc n-RegGain n957.15 = 3P256.B (173)KSrc M(lim,reg1)MINK0161Mmax1(reg,act)P257.B (173)KSrc T(lim,reg2)MAXK0162Mmax2(reg,act)M(lim,act)[369], [370]T(lim2,act)[369], [370]xy[371.5] ... [374.5]DA65-6367F MF 1d n/d tD n F JD V n +M +FD ManeuveringV setboostactset Power sectionSpeed controllerCurrent controllerFriction torque act actGain-adaptionGain-adaptionactTaper tension characteristic Jog setpointTension controlactInertia characteristicDiameter calculatoractconstD A 65-6034Datum Bearb. Zelder09.11.0130A&D MC PM5Siemens AG Dateifp_winder_030_e.vsdSeite Diameter- Speed calculationWinder concept, Basic drive CUMC/VCy x x =43U951.32 =4U961.32 =1085KK0484K0471U115 (0).01x4K0401.02x x 12•x1x2K0501.03y2=x4100%x3 (16bit)y2ScalingK0483y when division by 0 (x3=0):x4 > 0 :y =+199,99 %x4 = 0 :y =0,00 %x4 < 0 :y = -199,99 %value range of X4: -400 % ...+400 %;in case of KK0484 limited on range -200% (200)<1>(32bit)(32bit)200%-200%200%-200%D min [%]Transformation line speed setpoint -> speed setpointn set [%] (Source main speed setpoint)D act [%] (Output limiter)V set [%]Jog line speed setpointto [40.C2]from [35.B7]from [30.C6]KK0470.01U176 (0)U950.86 =4U960.86 =1065KK0526KK0470U177 (0)B0601.02KK040501Jog OFF: 0Jog ON: 1V set [%]U951.31 =4U961.31 =1055KK0404U110 (0).01yKK0001.02x1x2100 %•x1x2200%-200%Maneuvering input (e.g. analog input)Line speed setpointU951.05 =4U961.05 =1075K0471K0526U111 (0).01yK0042.02x1x2x x 1100%2•when division by 0 (x2=0):x1 > 0 :y =+199,99 %x1 = 0 :y =0,00 %x1 < 0 :y = -199,99 %200%-200%KK0042Gear ratio k Gto [30.E3]P402.F (100%) -200.00 ... 200.00%K0405U005.F (0%)-200.00...200.00 %V set [%]n act [%]y x x =43U951.06 =4U961.06 =1005KK0482K0404U114 (0).01x4K0401.02x x 12•x1x2K0091.03y2=x4100%x3 (16bit)y2ScalingK0481y when division by 0 (x3=0):x4 > 0 :y =+199,99 %x4 = 0 :y =0,00 %x4 < 0 :y = -199,99 %value range of X4: -400 % ...+400 %in case of KK0482 limited on value range -200% (200)<1>(32bit)(32bit)200%-200%200%-200%Diameter calculation-1-13210U124 (1)0 (3)K0481U123 (0)Smoothing time constant0...10000 ms U125 (100 ms)K0493U952.67 =4U962.67 =1015D act [%] (Input motorpoti)D min [%]to [35.D4]D A 65-60358•4 combined digital inputs/outputs •3 additional digital inputs •1 analog input, current or voltage •1 analog input, voltage•1 analog output, current or voltage •1 analog output, voltage•One RS 232 and one RS 485 interface•••••In In P10 V / N10 V I < 5 mA 5V 24VIn5V24V7819101112R i = 3.4 k 1314P10N101516DADA In 5V24V121718DA S345-10...+10 V DA -10...+10 VMMX102In In AI 1AI 2U : R in = 60 k I : R in = 250 k U : I < 5 mAAO 2AO 192120HS1HS2R i = 3.4 k R in = 60 k 30 V / 0.5 AOutU : I < 5 mA I : 0...+20 mA0...+20 mA3S4-10...+10 V-10...+10 VDA65-5971Ω ΩΩΩΩ 4 bidirectional digital inputs/outputsOutputsReference voltage Digital inputs Analog input 2(non-floating)11 bits + sign (close S3)Analog output 210 bits + sign Analog output 110 bits + sign InputsDigital input Analog input 1(non-floating)11 bits + sign Floating switch A9MASTERDRIVES VC Compact PLUS10Converters 3-ph. 380 V –15% to 480 V +10% 50/60 HzNominal Rated Line Order No.Dimensions Weight Cooling Soundpower output Short-time current W x H x D air re-press.rating current I n current1)*)quirement levelkW A A A mm kg m3/s db (A)0.55 1.5 2.4 1.76SE7011-5EP60 45 x 360 x 260 3.00.002181.1 3.0 4.8 3.36SE7013-0EP6067.5 x 360 x 260 3.70.009401.5 5.0 8.0 5.56SE7015-0EP6067.5 x 360 x 260 3.70.009403 8.012.8 8.86SE7018-0EP60 90 x 360 x 260 4.10.01837410.016.011.06SE7021-0EP60 90 x 360 x 260 4.20.018375.514.022.415.46SE7021-4EP60135 x 360 x 26011.10.041487.520.532.822.66SE7022-1EP60135 x 360 x 26011.20.041481127.043.229.76SE7022-7EP60180 x 360 x 26015.30.061591534.054.437.46SE7023-4EP60180 x 360 x 26015.50.06159*)Rated line current of a converter excluding additional inverters. If the converter supplies additional inverters then this value is 1.76 x I n (I n = rated output current).Within the compact PLUS series, additional inverters may be connected to a converter unit via the DC link bus.The sum of the nominal power ratings of the complete system may equal twice the nominal power rating of the converter.For the infeeding power, a coincidence factor of 0.8 must be taken into account, i.e. the rectifier of the converter is thermically designed for 1.6 times the nominal power of the converter.The converter switched mode power supply can supply an additional 2 inverters with 24 V DC power(in the case of a 6SE7011-5EP60 converter only 1 additional inverter may be supplied).A capacitor module may be connected to the converter for short-time energy storage.Inverters DC 510 V –15% to 650 V +10%Nominal Rated DC link Order No.Dimensions Weight Cooling Sound Aux. currentpower output Short-time rated W x H x D air re-press.24 V DCrating current I n current1)current quirement level(max. at 20 V)kW A A A mm kg m3/s db (A)A0.75 2.0 3.2 2.46SE7012-0TP6045 x 360 x 260 2.60.00218 1.51.5 4.0 6.4 4.86SE7014-0TP6067.5 x 360 x 260 3.20.00940 1.52.2 6.1 9.8 7.36SE7016-0TP6067.5 x 360 x 2603.30.00940 1.5410.216.312.16SE7021-0TP6090 x 360 x 260 3.40.01837 1.55.513.221.115.76SE7021-3TP60135 x 360 x 260 8.90.0414827.517.528.020.86SE7021-8TP60135 x 360 x 260 9.10.0414821125.540.830.36SE7022-6TP60135 x 360 x 260 9.30.0414821534.054.440.56SE7023-4TP60180 x 360 x 26013.80.06159218.537.560.044.66SE7023-8TP60180 x 360 x 26014.00.0615921)Short-time current1.6 x I n for 30 s1.36 x I n for 60 srefer to diagram on page 111.36 x I n for 60 srefer to diagram above2)The busbars E-Cu 3x10 have a rated current of 120 A. The 100 kW rectifier unit must therefore be located in the middle of the multi-motor drive configuration,so that the DC link current is shared equally to the inverters connected to the left and the right of the rectifier unit.1112MASTERDRIVES VC Compact PLUS13Braking resistorsRated braking power Short-time braking Continuous braking Resistance Order No.Dimensions Weight power power W x H x D P20P3PDB kWkWkWOhmmmkg5 7.5 1.25806SE7018-0ES87-2DC0145 x 180 x 5406 10 15 2.5406SE7021-6ES87-2DC0145 x 360 x 54012 20 30 5206SE7023-2ES87-2DC0450 x 305 x 48517 50 7512.5 86SE7028-0ES87-2DC0745 x 305 x 4852710015025 46SE7031-6ES87-2DC0745 x 605 x 48547Capacitor moduleCapacitance max. DC link voltage Order No.DimensionsWeight continuous short-time W x H x D mFVVmmkg5.17157806SE7025-0TP87-2DD090 x 360 x 2606DC link moduleContinuous current Voltage rangeOrder No.Dimensions Weight W x H x D Ammkg120510 V DC –15% to 650 V +10%6SE7090-0XP87-3CR090 x 360 x 260 2.6Radio interference suppression filtersRated current Integrated Limit-Typ. power loss Order No.Weight line reactor value class2% u kAWkg2yes B1 56SE7012-0EP87-0FB0 2 6yes B1 136SE7016-0EP87-0FB0 3.5 12yes B1 236SE7021-2EP87-0FB0 5.5 18yes B1 266SE7021-8EP87-0FB0 7.5 36no B1 306SE7023-4ES87-0FB1 4 80no B1 406SE7027-2ES87-0FB110190no A1 706SE7031-8ES87-0FA013320no A11006SE7033-2ES87-0FA121Commutating reactors 2% u kRated current Power loss Order No.Weight 50/60 Hz approx.AWkg1.5 8/104EP3200-4US 1 312/184EP3200-5US 1 523/354EP3200-2US 1 9.135/384EP3400-2US 1.511.235/384EP3400-1US 1.51645/484EP3500-0US 21852/574EP3600-4US 32852/574EP3600-5US 3Rated current Power loss Order No.Weight 50/60 Hz approx.AWkg35.5 57/604EP3700-2US 4 40 57/604EP3700-5US 4 50 67/714EP3800-2US 5 63 67/714EP3800-7US 5 80 82/874EP3900-2US 6.5125 96/1034EP4000-6US10224190/2004EU2552-8UA00-0A 16.5System componentsDC link connectionThe DC link connection is made using three busbars: positive-connection (C), negative-connection (D) and protective earth (PE). Copper busbar E-Cu 3x10 tinned and rounded according to DIN 46 433, rated current 120 A (e.g. Siemens 8WA2 842length 1 m, or Phoenix Contact GmbH & Co., type NLS-Cu 3/10 Internet: )3000 1/min15MASTERDRIVES VC Compact PLUSDimensionsRectifier unitsFront views without front coverDC link and capacitor moduleConverter 0.55 kW 1.1/1.5 kW 3 kW and 4 kW 5.5/7.5 kW 11/15 kW Inverter0.75 kW1.5/2.2 kW4 kW5.5/7.5/11 kW15/18.5 kWFront views without front coverMASTERDRIVES VC Compact PLUSBraking resistor 100 kW6SE7031-6ES87-2DC016MASTERDRIVES VC Compact PLUS6SE7012-0EP87-0FB0MASTERDRIVES VCCompact PLUS ArrayScrew terminal 8WA9 200(for I≤ 15 A)LNSolid0.5 mm2 to 6.0 mm2Finely stranded 1.5 mm2to 4.0 mm2Screw terminal RKW 110 or16 A to 35.5 A)TRKSD 10 (for ILNSolid 1.0 mm2 to 16.0 mm2Finely stranded 1.0 mm2to 10.0 mm2Earthing stud M 6 x 12Solid 2.5 mm2 to 10.0 mm2Finely stranded 4.0 mm2to 10.0 mm2Screw terminal RKW 110≤ 40 A)or TRKSD 10 (for ILNSolid 1.0 mm2 to 16.0 mm2Finely stranded 1.0 mm2to 10.0 mm2Earthing stud M 6 x 12Solid 2.5 mm2 to 10.0 mm2Finely stranded 4.0 mm2to 10.0 mm2Screw terminal 8WA1 30440 A to 50 A)(for ILNSolid 1.0 mm2 to 16.0 mm2Stranded10.0 mm2 to 25.0 mm2Finely stranded 2.5 mm2to 16.0 mm2Earthing terminalEK 16/35Solid 2.5 mm2 to 16.0 mm2Finely stranded 4.0 mm2to 16.0 mm2MASTERDRIVES VC Compact PLUSSiemens AGAutomation and Drives Group Motion Control SystemsP .O. Box 3269, 91050 Erlangen Federal Republic of Germany Siemens AktiengesellschaftOrder No. 6ZB5711-0AA02-0BA0Printed in the Federal Republic of Germany 18401/222198 SV 1101 4.0© Siemens AG 2001Subject to change without prior notice Additional information about SIMOVERT MASTERDRIVEScan be found in our Catalogs DA 65.10 and DA 65.11Information about this product can befound in the Internet under:http://www.siemens.de/automation/mc。
LSIS-MECAPION-伺服应用案列PPT课件

DD马达 (BiSS-B Enc.)
第三方电机 (EnDat2.2/Tamagawa/Sinusoidal)
L7N案列·BOE·液晶面板专机
主要特征
应用构成
▪ 客户: BOE B4 Line
▪ 一台设备最多的是26轴同步(FB01AMN~FE22DMN) ▪ 因轴数多,需要高速的数据处理 ▪ 因与运动控制器一起使用,所以PC负载率很重要 ▪ 要让整个构成简单化,易于维护
随后EtherCAT成为韩国 工业标准协议,也是最 早把EtherCAT上升为战 略端的国家之一
LS是较早推出 EtherCAT产品的 集团公司
2012年LS Mecapion向中国 正式出售 EtherACT伺服
L7N
2015年 LS Mecapion 推出高 性能版 EtherCAT 伺服 L7NH
主要特征
▪ 扭矩 & 速度控制 ▪ 构造简单 ▪ 使用Visual Studio 2010 ▪ 开发时用Windows XP,但实际应用时用Windows7 64bit
24
L7N案列·舞台
设备:升降机械,舞台控制 轴数:916轴 适应电机:SB04ANK1 适应伺服: L7NA004B 应用上位机:beckhoff控制器 控制方式:循环同步位置控制模式
7
L7N案列·弹簧机
Coil Machine (7-Axis, 1-MPG)
Forming Machine
(6-Axis, 1-MPG, 1-External Encoder)
MXN弹簧机专用软件
CAM-less Forming Machine (20-Axis, 1-MPG,
1-External Encoder)
SIMDRIVE 3D 前端附件轮系技术介绍

仿真模型示例
熠辉科技
仿真矩 示例
曲轴转速波 输入
类型 图标
实测数 据
示例曲线
单转速
转速扫
仿真模型
说明
仿真精度高, 可用于启 工况的模拟
建模简单快 捷,计算速 度快
前端仿真标 准工况
多转速
熠辉科技
用于 率损 失、寿命分 析等工况
曲轴转速数据读入
读入数据类 称 图标
型次激 励RUN P 激励映射激 励
特点
仿真激励
说明
次激励 数据 读入工具,可转 换 转速扫
多转速激励
Run up激励 数 据读入工具,可 转换 转速扫
多转速激励
+
映射激励 能单
独做转速激励,
+
需要 转速扫
多转速激励共
使用
熠辉科技
027-84839925
发 机启 分析
建立曲轴模型,通过测试气缸压力和电 机扭矩进行启 分析
熠辉科技
气缸压力
曲轴阻尼 双质 飞 轮特性
启 电机
027-84839925
BSG启
发电机启 扭矩 发电机负载扭矩
熠辉科技
027-84839925
皮带 率损失因素
前端 率损失有多种因素 要因素有以下三种:
静态 率损失 弯曲,径向压缩 激励和共振原因的 态损失(拉伸, 滑移) 额外损失(张紧臂抖 , 皮带抖 , 轴摩擦,)
熠辉科技
循环工况定义
用于寿命分析及 率损失分析等
熠辉科技
027-84839925
SIMDRIVE 仿真结果
•SIMDRIVE 仿真 时域 态仿真 •SIMDRIVE 仿真完成 自 生成 处理结果包括:
汇川伺服产品 ppt课件

LL
安川
Σ7
72 SGM7A-A5A*
102
20902W 72.5mm
SGM7A-01A* 122
79.5 SGM7A-02A*
116
IP989+ 78.1mm
SGM7A-04A* 135.5
112.2 148.2
SGM7A-08A*
88 117.8
SGM7J-04A*
95.4 129
SGM7J-08A*
LL
65 96 77.5 109 72.5 100 91 119 107 140 105 128 117.5 147.5
松下
A6 MSMF5AZL1*2M MSMF012L1*2M MSMF022L1*2M MSMF042L1*2M MSMF082L1*2M MHMF042L1*2M MHMF082L1*2M
举例说明: 拉丝机 造纸机
汇川技术
四
伺服系统 | 变频器 | PLC | 伺服驱动器 | 工业互联网 | 新能源
49
汇川伺服行业应用
行业应用
行业应用
➢ 应用模型——快速点位
行业应用
➢ 应用模型——力的控制
行业应用
➢ 应用模型——轨迹类
行业应用
➢ 应用模型——多轴
行业应用
➢ 应用模型——机器人/机械手
命名规则
IS810
IS810
➢ IS810系列
型号 IS810N-INT IS810N IS810P
功能描述 EtherCAT总线控制、 CAN
EtherCAT总线
脉冲控制方式
兼容上位机
AM600,欧姆龙NJ, 倍福,Codesys体系
AM600,欧姆龙NJ, 倍福,Codesys体系
VISSIM简介ppt课件

VISSIM主要功能
➢ 系统建模与动态仿真
加快仿真速度:使用VisSim/C-Code(单独提供),用户可生成
在任何支持ANSI C编译器平台上编译和运行的代码。相比对应的模块 图形,由此产生的可执行文件最快可运行到高于正常速率五倍的运行 速度,其尤为适用于高采样率系统。
查看仿真结果:为查看执行仿真后模型性能VisSim为用户提供了
由的进行软件之间的数据和图形交换。
7
VISSIM主要功能
对于动态控制系统, VisSim 的算法和解决方 案具有更快、更准确、适应性更强的优点。同时 针对飞速发展的通信行业及嵌入式系统的运用, Visual Solutions 在 VisSim 软件基础上开发了 点到点物理层验证工具和嵌入式控制系统开发工 具,完美的解决了通信系统和嵌入式控制系统开 发过程中的设计验证问题。这可使用户拥有更低 廉的成本和更短的产品上市时间。
执行模式:用户通常从VisSim的图形用户界面运行仿真,但如果
用户需要查看仿真结果,可在批处理方式中对其进行运行。用户还有
以下几种执行模式选择:▪ 标准模式:对模型进行说明性的仿真。▪
快速模式:模型中的组件被转换成为可执行的代码,并作为VisSim生
成的DLL纳入模型之中(需要VisSim/C-Code)。
编码器和射频组件:对于需要编码的设计,VISSIM /COMM支持常
规的编码技术(卷积,里德 - 所罗门,网格为基础的),以及更先 进的方法,如UMTS或LTE Turbo码。此外,设计要求的射频元器件的 建模,VISSIM /COMM提供了放大器,混频器,分路器,衰减器,耦合 器和交换机,包括噪声系数和非线性效应im/Comm C-Code:将通信模块翻译成为满足ANSI C代码。为了翻 译成为标准VisSim模块您亦需要VisSim/C-Code。
《ROFIBUS系统》PPT课件

Receiver 站 CPU314C-2DP
Publisher 站 CPU315-2DP
精选ppt
PROFIBUS-DP功能划分
精选ppt
RS485 / RS485-IS的应用
最大段长度 [m]
Transmission Rate [kBits/s]
9.6; 19.2; 45.45; 93.75
DP(Decentralized periphery) 一种高速低成本通信,用于设备级控制系统与分散式I/O
的通信。
PA(Process Automation) 专为过程自动化设计,使用MBP(Machester coded,Bus powered)、IS技术。
FMS(Fieldbus Message Specification) 用于车间级网络监控。是一个令牌结构、实时多主网络。
精选ppt
第二篇,PROFIBUS网络拓扑
一,总线拓扑1
波特率(K Bit/s) 9.6~187.5
500
总线长度 (米)
1000
400
1500 200
3000~12000 100
选用西门子中继器最多可以串连9个
精选ppt
二,总线拓扑2
通过OLM拓展
精选ppt
OLM
三,树形拓扑1
电器接口需要通过中继器
精选ppt
八,PROFIBUS连接图2
DP or PA 接口
分布式 电气柜
Transmitter
Positioner
控制室 现场
PEL
适合使用接地故障监视和延伸 PEL = potential equalisation line
很大区域的安装
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
CONTECS
SIMDRIVE 简介
由VDA 组织, 林工业大学主导研发
Berlin Map
Head Office 6th Floor
Test Lab
-泛亚汽车 术中心有限公司-重庆长安汽车股份有限公司
--Gates Unitta Korea Co. Ltd., Korea --Gates Unitta India Co. Pvt. Ltd., India --Gates Unitta Asia Technical Center, Japan --Mitsuboshi Belting Ltd., Japan -Bando Chemical Industries Ltd., Japan -Bando Korea Co., Ltd.-盖茨优霓塔传动系统,中国-岱高 州 汽车零部件有限公司-莱顿汽车部件( 州)有限公司-GMB Korea Corp, Korea
-Suzuki Motor Corporation, Japan -NOK Corporation, Japan -J.K. Fenner India Ltd.- 南方轴 股份有限公司-无锡永凯达齿轮有限公司
-上海振华轴 股份有限公司
-成都嘉陵华西光学精密机械有限公司- 爱尔特实业有限公司
SIMDRIVE 背景简介
全球范围内的用户
Europe
America
Asia
-Chrysler, USA -Cummins Tech Center, USA/ Brazil
-Dayco Products, L.L.C., USA -Gates Corporation, USA -Litens Automotive Group,USA , Canada
-Schaeffler Group USA Inc. (INA USA Group)
-ContiTech North America, USA -General Motors, USA -Fiat Automóveis S.A., Brazil
-Audi AG Ingolstadt / Neckarsulm -BMW Group, BMW M GmbH -Cummins Engine Company Ltd., UK -Daimler AG, Germany
-Jaguar Cars Ltd. & Land Rover, UK -Mercedes-AMG GmbH
-Dr. Ing. h.c. F. Porsche AG, Germany -Porsche Engineering Group GmbH, Germany -Skoda Auto, Czech Republic
-Volkswagen AG, Volkswagen Motorsport, Germany -Ford Motor Company Ltd., worldwide -General Motors Powertrain GmbH, Germany -MTU Friedrichshafen GmbH, Germany
-Volvo Cars Corporation, Sweden -Muhr und Bender MUBEA, Germany -IAV GmbH, Germany, France -Valeo Electrical Systems, France
-ContiTech Antriebssysteme GmbH, Germany -Schaeffler Technologies GmbH & Co. KG, Germany -Litens Automotive Group, Germany -Gates GmbH, Germany -Dayco Europe, Italy, Germany -Hutchinson, France, Germany -Metaldyne Int., Germany, France -Optibelt GmbH, Germany -Jaguar Landrover Ltd, UK
-Mbtech Group, Deutschland
-MBL Antriebstechnik Deutschland, Germany
-Winkelmann Powertrain Components GmbH, Germany -LUK GmbH & Co. KG, Germany -MAN Nutzfahrzeuge AG, Germany -Vibracoustic GmbH & Co. KG, Germany -SKF France
-Adam Opel AG, Germany -IAV GmbH, Germany
规模规模 参数规模越来越大,原有仿真模式无法满足项目要求
响应
响应 设计更改往往限于少数零部件,如进行样件试验需花费大 时间和资金 数据、部门…… 验
验 过往的设计 验只能有条件的借鉴边界
边界 仿真模型的边界及设计更改对边界的影响难以明确,甚至无法获取
多学科
多学科 设计必须考虑多学科之间的相互影响新 术应用
新 术应用 新 术引进对于整体的影响,尽快评估其风险 对于时间敏感度更高
开发背景
需要系统的,高效的仿真平 有了这个虚拟测试平 ,所有工程师都 以 到是哪个零件在影响他的设计
SIMDRIVE 简介开发背景
系统仿真平 SIMDRIVE 3D
SIMDRIVE 功能
仿真平
正时阀系前端附件
轴系
齿轮传动
离合壳体关键部件DMF
轴 轮胎……
高新 术混合动力
电 电机热学
控制……
总体模拟
总体仿真
SIMDRIVE 功能
前端附件
缸体、壳
体
正时、阀系
齿轮传动
轴系、飞
轮、离合
控制、整体
DMF 离合轴
缸体壳体新 术-轮胎-控制
-电机电 -混合动力平 平 总体总体
SIMDRIVE 功能
前端附件
正时传动
阀系
轴系
齿轮传动
其它
应用
动力传动系统
仿真平。