基于多DSP的混合式结构自主移动机器人设计
世界技能大赛移动机器人运动控制系统设计

0引言世界技能大赛由世界技能组织举办,被誉为“技能奥林匹克”,是世界技能组织成员展示和交流职业技能的重要平台,比赛项目共分为6个大类,分别为结构与建筑技术、创意艺术和时尚、信息与通信技术、制造与工程技术、社会与个人服务、运输与物流。
移动机器人项目属于制造与工程技术领域的赛事之一,随着制造业的转型升级,技能人才的培养也扮演着越来越重要的角色,为了更好地推广移动机器人项目,让更多的院校参与世界技能大赛,让更多的学生学会利用自动控制技术设计世界技能大赛所需的移动机器人,笔者将几年来对移动机器人电机控制、运动规划方面的一些技巧及实现做了总结,旨在让更多的参与者快速学会对移动机器人的控制,更好地推动移动机器人相关专业的发展。
1系统组成1.1系统基本构成世界技能大赛移动机器人项目一般要求参赛队伍所制作的移动机器人具有较为灵活的移动能力,为了满足这一条件,普遍采用全方位移动的机器人设计。
全方位移动机器人具有全方位运动能力,其实现方式关键在于全方位的轮系结构,该结构具备每一个大轮边缘套有小轮的机构,能够避免普通轮系不能侧滑带来的非完整性运动限制,从而实现全方位运动。
在比赛中,机器人较为常用的底盘是用 3 个全向轮组成的底盘运动控制系统。
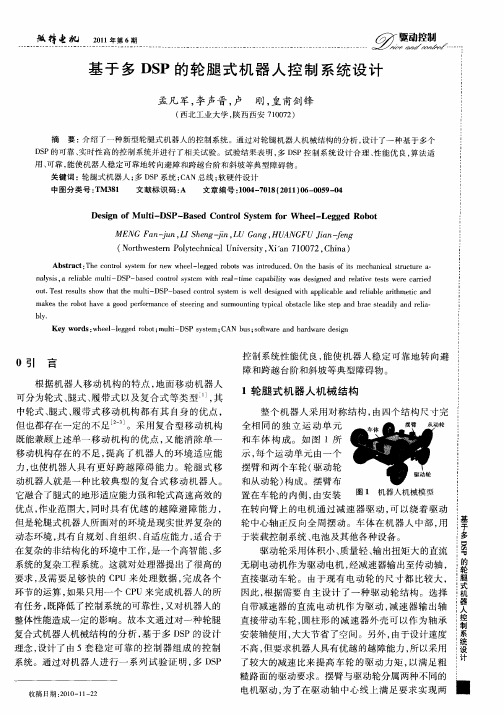
其中,三个全向轮运动轴心夹角按照 120°进行设计,之间通过3条横梁互为60°连接构成,如图1所示,底盘三个全向轮由独立的电机驱动。
底盘运动信息主要通过三个360线的编码器和一个9轴陀螺仪获取。
图1 三轮机器人效果图(左)及实物图(右)1.2系统主体框架世界技能大赛移动机器人项目所设计的机器人,既要考虑到实用性,又要考虑到使用提供指定套件来搭建。
整个指定套件提供了4个直流电机、3个舵机、1个陀螺仪、2个超声波传感器、2个红外传感器、2个限位开关,设计的机器人需要依赖于上述提供的电气元件。
笔者所使用的三轮平台由核心控制模块(MYRIO)、传感器检测模块、世界技能大赛移动机器人运动控制系统设计 章安福(广州市工贸技师学院,广州,510000)摘 要世界技能大赛移动机器人项目要求设计的机器人能够在2m×4m的平面场地中完成一定的任务,而全向轮式移动机器人为非完整性约束系统,机器人可向任意方向做直线运动而不需事先做旋转运动,同时可执行复杂的弧线运动。
基于DSP的工业机器人控制器的设计与实现
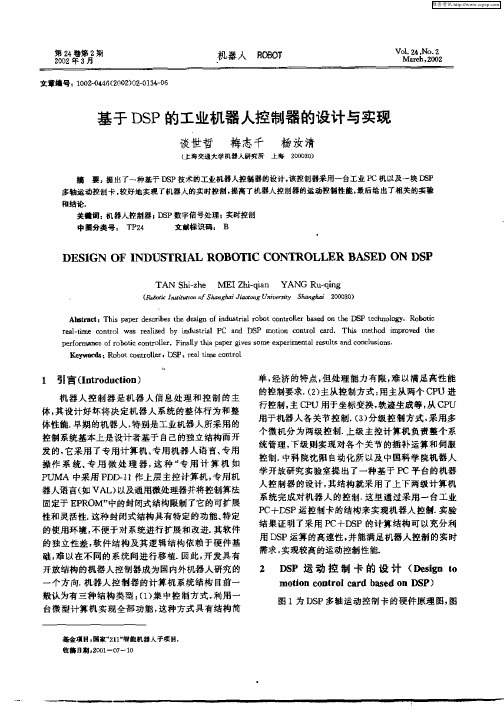
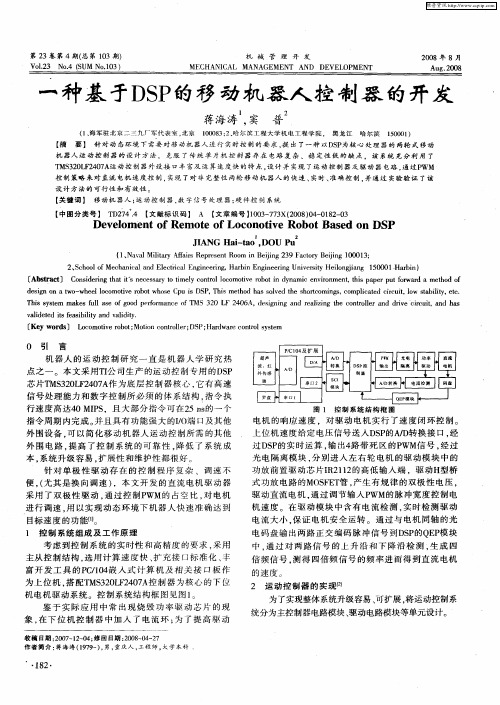
图 1为 D P多轴运动控制卡 的硬件 原理 图, S 图
基金硬 目, 国家“ 1 馏 能机器人子项 目 21
收翦 日辫,。1 7 0 2 0—0—1
维普资讯
第 2 卷第 2 4 期
谈 世哲等 : 基于 DS P的工业机器人控制器 的设计 与实现
1 引言 (nrd cin I to u t ) o
机 器人控制器是 机器 人信 息处 理和控制 的主 体, 其设计好坏将决定机器人系统的整体行为和整 体性能. 早期的机器人 , 特别是工业机器人所采用 的 控 制 系统基 本 上是 设 计者 基于 自己的独立 结 构而 开 发的, 它采用 了专用计算机、 专用机器人语言、 专用 操作 系 统、 用 微 处 理 器 , 种 专 用 计 算 机 如 专 这 P M A 中采 用 P D ¨ 作 上 层 主 控 计 算机 , U D 专用 机 器人语言( VA ) 如 L 以及通用微处理器并将控制算法 固定于 E R M” P 0 中的封闭式结构限制了它的可扩展 性和灵活性. 这种封 闭式结构具有特定的功能、 特定 的使用环境, 不便于对系统进行扩展和改进. 其软件 的独立性差 , 软件结构及其逻辑结构依赖于硬件基 础 , 以在不同的系统问进行移植. 难 因此 , 开发具 有 开放结构的机器人控制器成为 国内外机器人研究 的 个 方 向. 器 人 控 制 器 的计算 机 系统 结 构 目前 一 机 般认为有三种结 构类型 :1 集 中控制方式, () 利用一
p ro ma c f o t o tolr ef r n eo b i c n r l .Fial hsp p rgv ss mee p rme tlrs1s a dc n lso s ro c e n l t i a e ie o x e i na eI t n o cu in . y l K£ s :Ro o o tolr,DS , elt o to b tc n l r e P r a i c n r l me
一种基于DSP的移动机器人控制器的开发
[ e od ] L cmov btM t ncnrl rD P H d ae ot l ytm K yw rs oo t er o; oi o t l ; S ; a w r c n o ss i o o oe r r e
0 弓 言 I
机 器人 的运 动 控 制 研究 一直 是 机 器 人 学 研 究 热 点 之~ 。本 文采 用T 公 司生产 的运动 控 制 专用 的D P I S
一
种基 于D P S 的移 动机 器人 控 制器 的开发
蒋海 ቤተ መጻሕፍቲ ባይዱ 窦 普 ,
( 、 军 驻 北 京 二 三 九 厂军 代 表 室 , 京 10 8 2、 尔 滨工 程 大学 机 电工 程 学 院 , 黑 龙 江 哈 尔 滨 10 0 ) 1海 北 0 0 3; 哈 5 0 1
【 摘
芯 片T 3 0 F 4 7 作 为 底层 控 制 器核 心 , MS 2 L 2 0 A 它有 高速
信 号处理 能 力 和数字 控 制所 必 须 的体 系结 构 , 令执 指 行速 度高 达4 P .且 大 部分 指令 可在 2 S 0MIS 5I 的一 个 1 指令周 期 内完成 。 并且 具有 功能 强大 的I 端 口及其 他 / O 外 围设备 . 以简化 移 动机 器人 运 动控 制所 需 的其 他 可
维普资讯
第2 3卷 第 4期 ( 第 1 3期 ) 总 0
机 械 管 理 开 发
ME CHANI AL C MANAGEMENT AND DE VEL MEN 0P T
2o o 8年 8月
Au 2 g、 008
V 1 3 N . (U o1 3 o. o S M N .0 ) 2 4
d sg n at o wh e o o t e r b tw o e C u i P T i meh d h ss l e h h rc mi g , o l ae i u t l w sa i t, t 、 e i n O w — e l c moi o o h s p sDS , h s l v t o a o v d t e s o to n s c mp i t d cr i o t b l y e c c c , i T s se ma e u la e o o d p r r n e o MS 3 0 L 4 6 h y tm k s f l s fg o ef ma c fT 2 F 2 0 A,d sg ig a d ra iig t e c n r l r a d d v i u t a d h s o e in n n e l n h o tol n r e cr i n a z e i c . v ie e t f a i i t n a i i . l a d td i e sbl ya d v l t s i dy
两轮移动式倒立摆机器人系统结构及模型设计
两轮移动式倒立摆机器人系统结构及模型设计宋昌统【摘要】倒立摆是典型的非线性控制系统,集机器人技术、人工智能技术、计算机控制技术于一体,两轮倒立摆是一种两轮式左右并行布置结构的自平衡系统。
采用DSP最小系统实现控制模块的设计,采用倾角传感器、陀螺仪、编码器等保持系统的自平衡,通过它们测量和计算出小车的状态参数。
进而通过微分计算出小车左、右车轮的角速度,再通过控制系统与PC机之间的通信,得出倒立摆系统的控制规律和运动模型,在平衡点附近对系统进行线性化处理,得到系统的运动仿真曲线,并分析系统的稳定性和能控性。
%Inverted pendulum is a typical nonlinear control system,integrating robot technology,artificial intelli-gence technology and computer control technology.Two-wheel inverted pendulum is a self-balanced system with a structure of two wheels paralleled on the right and left.Design by using DSP minimum system control module is to keep self-balance of the system through the angle sensor Takahashi Ji,multi variable,strong coupling and strong robustness for nonlinear systems,with which to measure and calculate parameters of cars and then calculate the angular velocity of right and left wheels.The communication between the control system and the PC machine is used to decide the control law and the motion model of the inverted pendulum system.Near the equilibrium point,the system is linearized to get the motion simulation curve of the system and analyze the system stability and controllability.【期刊名称】《镇江高专学报》【年(卷),期】2014(000)001【总页数】3页(P56-58)【关键词】倒立摆;自平衡;传感器;指令【作者】宋昌统【作者单位】镇江高等专科学校电子与信息工程系,江苏镇江 212003【正文语种】中文【中图分类】TP242移动机器人是机器人学的重要分支。
基于ARM的嵌入式移动机器人控制系统的设计
基于ARM的嵌入式移动机器人控制系统的设计嵌入式移动机器人控制系统是基于ARM架构设计的一种智能机器人控制系统,该系统具有灵活性高、性能稳定、功耗低等优点。
本文将从硬件设计和软件开发两个方面来详细介绍基于ARM的嵌入式移动机器人控制系统的设计。
硬件设计方面,嵌入式移动机器人控制系统的核心是基于ARM技术的处理器,可以选择低功耗、高性能的ARM Cortex-A9或Cortex-A53处理器。
处理器上可以集成多个内核,通过多核处理器的并行计算能力,可以提高机器人的实时性和响应速度。
此外,为了实现机器人的移动功能,还需要配备驱动电机的电机控制器和位置传感器,采用PWM控制技术来控制电机的转速和方向。
在软件开发方面,首先需要开发移动机器人的操作系统。
可以选择基于Linux的嵌入式操作系统,如Ubuntu的ARM版本或自主开发的实时操作系统。
操作系统可以负责机器人的任务管理和资源调度,提供良好的多任务处理能力。
其次,还需要设计适配机器人硬件的驱动程序,包括电机驱动、传感器驱动、通信驱动等。
驱动程序负责与硬件设备进行交互,将控制指令转化为相应的电信号或数据信号,并获取传感器的数据反馈。
最后,还需要进行机器人的应用开发,根据机器人的具体应用场景,开发相关的算法和控制逻辑,实现机器人的自主导航、路径规划、避障等功能。
在嵌入式移动机器人控制系统设计过程中,还需要考虑功耗管理、通信接口和外设模块等因素。
功耗管理是嵌入式系统设计中非常重要的一环,可以使用睡眠模式来降低功耗,还可以采用动态电压和频率调节的技术,根据系统负载的大小动态调整处理器的工作频率和电压。
通信接口方面,可以采用以太网、Wi-Fi、蓝牙等无线通信技术,实现机器人与外部设备的数据交换和控制指令的传输。
外设模块可以包括摄像头、激光雷达、超声波传感器等,通过外设模块可以实现机器人的感知和环境理解能力。
总之,基于ARM的嵌入式移动机器人控制系统的设计需要进行硬件设计和软件开发,并考虑功耗管理、通信接口和外设模块等因素。
基于多DSP的轮腿式机器人控制系统设计
全相 同 的 独 立 运 动 单 元
中轮 式 、 式 、 带 式移 动 机 构 都有 其 自身 的 优点 , 腿 履
但也 都存在 一定 的不 足 。采 用复 合 型移 动 机 构
既能兼顾 上述 单一 移 动 机 构 的优 点 , 能 消 除单 一 又
力 。该 芯 片包括 3线 S I 块 ( 持 4种 帧 模式 ) P模 支 , I 模块 支持 多主器 件/ 模式 和 7位/ 0位寻 址 , C 从 1 2个 带有 FF IO缓 冲 区 的 U R A T模 块 , 符合 2 0 2个 .B 的 C N模 块 , A 这为轮 腿式 机器 人主控 制器 和伺 服分 控制 器 、 位机 之间 的通讯 提供 强有力 的支持 。 上
电 驱 ,了 驱 轴 心 上 足 求 现 一 机 动为 在 动 中 线 满 要 实 两
驱动 控制
… - … … … … … … … … 一 一
微 持电棚 2 1 第 期 0 年 6 1
方 式 , 有 控 制 器 均 挂 接 在 C N总 线 上 。C N 总 所 A A 线 具有 以下特 点 : 多主工作 方 式 ; 总线 上 的节 点可分 成 不 同的优 先级 以满 足 不 同 的实 时 要求 ; 用 非破 采 坏 总线 仲裁技 术 ; 过报 文 的标识 符 滤 波 即可 实 现 通 点 对点 、 点对多 点 及 全局 广 播 等几 种 方式 传 送 接 一 收数据 ; 直接 通信距 离最 远可 达 1 m( 0k 速率 5k / b s 以下 ) 通信 速率最 高可 达 1Mb s 此 时通信 距离 最 , /( 长 为 4 ; 0m) 节点 数可 多达 10个 ; 文采用 短 帧格 1 报
基于DSP的移动机器人驱动系统设计

感 器 接 口。 整 个 系统 结构 简单 、 靠 , 下 一 步 关 于移 动 机 器 人 轨 迹跟 踪 的 算 法研 究提 供 实验 支持 。 可 为
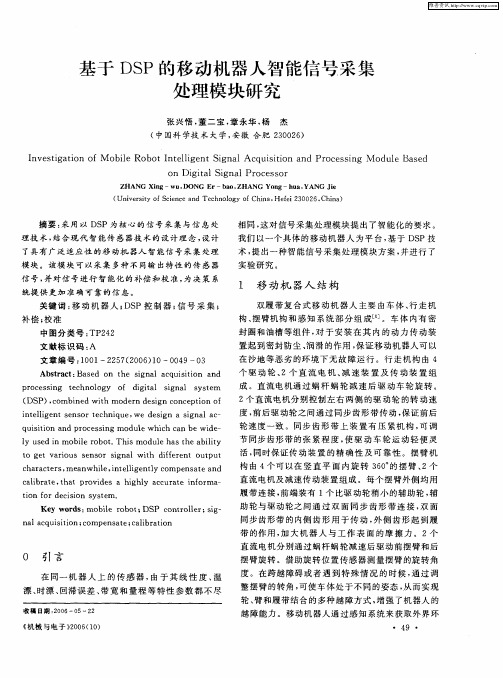
型 CP D来 扩 展 D P的 传 感 器 接 口 ,超 声 波 和 红 外 信 号 通 过 L S CP D 传 至 D P 提 供 机 器人 的位 置 信 息 。 L S ,
1 硬 件 设 计
D P输 出的左 ( 电机 的 P M、 和方 向信 号通 过 6 3 S 右) W 使能 N1 7 高 速 光 耦 后 , 后 面 的 模 拟 驱 动 信 号 很 好 地 隔 离 。 隔 离 后 , 号 和 信
基 于 D P的 移 动 机器 人驱 动 系统 设 计 S
基于 D P的移动机器人驱动系统设计 S
De i n o ie S se f r Mo l b t s d o DSP sg f Dr y t m o bi Ro o s Ba e n v e
孙 涛 师 五 喜 郭 利 进 郭 文 成 ( 天津工业大学电气工程与 自 动化学院, 天津 30 6 ) 0 10
图 1 系 统整 体 示 意 圈
获 单元 和 1个 正 交编 码 脉 冲单 元 。 另 有 1 6通 道 模 数 转换 模 块 、 串 行 外 设 接 口模 块 、 行 通 讯 接 口模 块 、 AN 控 制 器 模 块 和 4 串 C 0 个 可单 独 编 程 或 复 用 的通 用 lO。 /
关键 词 : 动机 器人 , 动 系统 , P 移 驱 DS
基于DSP的移动机器人智能信号采集处理模块研究
( P) c m b n d wih mo e n d sg o c p i n o DS , o i e t d r e i n c n e to f
i e lg n e o e hni e, e i i a c nt li e t s ns r t c qu we d sgn a sgn la — q sto nd p o e sng mod l uiii n a r c s i u ewhih c n be wi e c a d — l s d i y u e n mob l o t Thi ie r bo . s mod l st biiy u eha hea lt t t a i us e o sg l wih d fe e t o ge v ro s ns r i na t if r n ou pu t t c a a t r me nwhie,n e lg nty c m p ns t nd h r c e s, a l i t li e l o e a ea c lb a e, ha p ov d s a hi hl c u a e i or — a i r t t t r i e g y a c r t nf ma
ZHANG i g—WU D Xn . ONG Er—b o。 a ZHANG n Yo g—h a YANG Je u。 i
( n v r iy o inc d Te hn og fChi H ee 3 U i e s t fSce e an c ol y o na, fi2 002 Ch n 6. i a)
Absr c : s d on he i a a q i ii an t a t Ba e t sgn l c u ston d p oc s i t c ol gy o di t l sg l s s e r e sng e hn o f gia i na y t m
《基于ROS的机器人移动平台的设计与实现》范文
《基于ROS的机器人移动平台的设计与实现》篇一一、引言随着科技的不断发展,机器人技术已经逐渐渗透到各个领域,其中机器人移动平台作为机器人技术的重要组成部分,其设计和实现显得尤为重要。
本文将介绍基于ROS(Robot Operating System)的机器人移动平台的设计与实现,通过分析系统需求、设计思路、硬件构成、软件架构、实现方法及测试结果等方面,展示一个高效、稳定、可靠的机器人移动平台的实现过程。
二、系统需求分析在设计和实现机器人移动平台的过程中,首先需要进行系统需求分析。
本系统主要面向室内外环境下的移动机器人应用,需要满足以下需求:1. 自主导航:机器人能够根据环境信息自主规划路径,实现自主导航。
2. 稳定控制:机器人需要具备稳定的运动控制能力,以确保在复杂环境下能够安全、可靠地运行。
3. 兼容性强:系统需要具备良好的兼容性,能够与其他机器人模块(如传感器、执行器等)进行无缝集成。
4. 易于扩展:系统应具有良好的扩展性,方便后续功能的添加和升级。
三、设计思路基于上述需求分析,我们设计了一套基于ROS的机器人移动平台。
该平台采用模块化设计思想,将机器人分为运动控制模块、传感器模块、执行器模块等,各个模块之间通过ROS进行通信,实现信息的共享和协同。
同时,我们采用了先进的导航算法和运动控制策略,以确保机器人在各种环境下都能实现自主导航和稳定控制。
四、硬件构成机器人移动平台的硬件构成主要包括底盘、电机、轮子、传感器等。
底盘采用轻质材料制成,以降低机器人重量;电机和轮子负责驱动机器人运动;传感器则用于获取环境信息,为机器人的自主导航和稳定控制提供支持。
五、软件架构软件架构方面,我们采用了ROS作为机器人的操作系统,通过ROS提供的通信机制,实现各个模块之间的信息共享和协同。
同时,我们开发了相应的ROS节点,负责实现机器人的自主导航、运动控制等功能。
六、实现方法及测试结果通过《基于ROS的机器人移动平台的设计与实现》篇二一、引言近年来,随着科技的发展,机器人技术日益受到重视,其在各种应用场景下的功能性与便利性逐渐凸显。
新型移动并联机器人动力学分析与控制设计

新型移动并联机器人动力学分析与控制设计新型移动并联机器人动力学分析与控制设计一、引言近年来,机器人技术的发展取得了长足的进步,并被广泛应用于工业、医疗、军事等领域。
移动并联机器人因其具有高度机动性和灵活性的特点,成为研究的热点之一。
本文旨在对新型移动并联机器人的动力学进行分析与控制设计,以优化机器人的运动能力和工作效率。
二、新型移动并联机器人的基本结构新型移动并联机器人是指通过多个机械臂和轮式底盘结合而成的机器人系统。
其具有高度机动性,能够在不同地形环境下进行运动和工作。
新型移动并联机器人的基本结构包括机械臂部分和底盘部分。
机械臂部分是机器人的工作单位,负责完成各种任务。
通常由多个自由度的机械臂构成,每个机械臂上安装有各种工具和装置,以完成特定的工作。
机械臂的设计和动力学分析是新型移动并联机器人研究的重点之一。
底盘部分是机器人的移动单位,负责机器人的定位和导航。
底盘通常由多个封闭式回路构成,每个回路上配有一个轮子或履带,通过电机驱动实现运动。
底盘的设计和动力学分析对机器人的移动性能和稳定性至关重要。
三、新型移动并联机器人的动力学分析动力学分析是研究物体运动的一种方法,它借助于力学和数学工具,研究物体在外力作用下的运动规律。
对于新型移动并联机器人而言,动力学分析能够揭示机器人在不同工作状态下的力学特性,为机器人的运动控制提供关键参数。
1. 机械臂动力学分析机械臂的动力学分析是指研究机械臂在外力作用下的运动规律。
机械臂的运动可以分解为位置、速度和加速度三个方面。
通过分析机械臂各个关节的动力学特性,可以确定机械臂在特定工作状态下的力学性能。
动力学分析的结果可以用于机械臂的运动规划和控制。
2. 底盘动力学分析底盘的动力学分析是指研究底盘在外力作用下的移动规律。
底盘的移动可以分解为位置、速度和加速度三个方面。
通过分析底盘的运动特性和所受力的分布,可以确定底盘在不同地形环境和工作状态下的运动性能。
动力学分析的结果可以用于底盘的运动控制和路径规划。
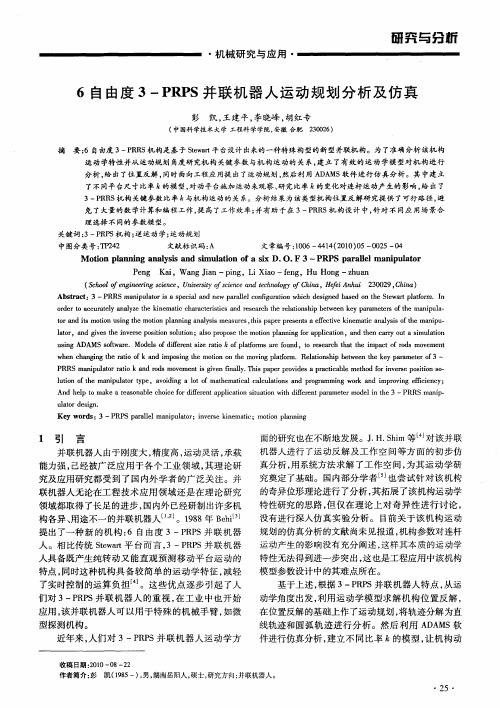
6自由度3-PRPS并联机器人运动规划分析及仿真
P R aiua r ai kadr s oe ets vnf ay T i ppr rv e apatal e o r ne epsinS— R Sm np t t d vm n ig e nl . hs ae oi s rccbem td f vr oio l or o n o m i i l p d i h oi s t O
u ig A sn DAMS s f r .Mo e so i e e t i a i f lt r l o n .t e e r h t a h mp c d v me t ot e wa d l df rn z r t k o a o ms ae f u d o rs ac h tt e i a to r s mo e n f se o p f f o
研 奔 与 分 析
・
机械研究与应用 ・
6自 由度 3一P P a S并 联 机器 人运 动规 划 分 析 及 仿 真
彭 凯, 王建平 , 晓峰 , 李 胡红 专
20 2 ) 30 6 ( 国科 学技 术 大 学 工 程科 学 学 院 , 徽 合 肥 中 安
摘
要: 6自由度 3一P R R S机 构是基 于 S w r平 台设计 出来的一种特殊构型的新型并联机构。为 了准确分析 该机 构 t at e
a o a vs h vre s i sl i ; l rps i l nn f pi t n adt ncr u s l t n lt , dg e ei es oio o t n a opooete t np n i r p l ao , n e ar ot muao rn i t n p tn uo s h mo o a g o a c i h y ai i
M o o pl n ng a l s an i i t n an i na y B d smul to o i O. 3一PRPS pa a llma p a o a i n fa sx D. F r le ni ul t r
基于DSP的三肢体仿生机器人控制系统设计
摘 要 : 于分级控 制 和模 块化 设计 思 想 , 计 了 基 设
一
种 适用 于三肢 体仿 生机 器人 控 制 的 , 用 P 机 、 采 C
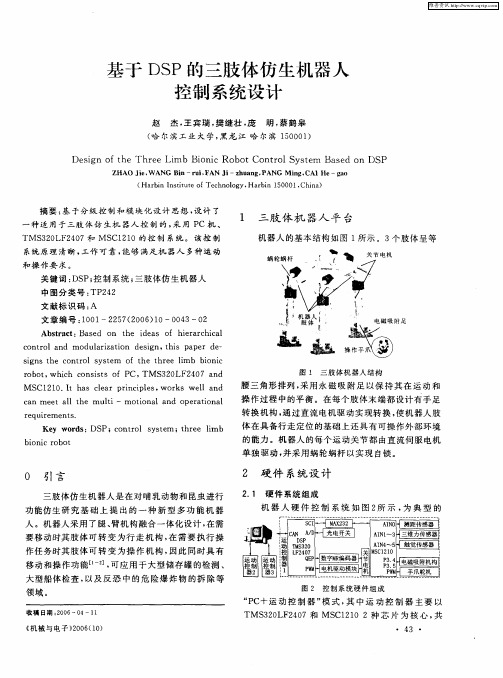
1 三肢 体 机 器人 平 台
机器人 的基本 结构 如 图 1 示 。3个肢 体呈 等 所
蜗
TM ¥ 2 LF 4 7和 M S 2 0 的控 制 系 统 。 该 控 制 30 20 C1 1
Ke wo d :DSP;c y rs ontol y t m ;t e l b r s s e hr e i m
b o c r ot i ni ob
的能力 。机 器人 的每 个运 动关 节都 由直流伺 服 电机
单 独 驱动 , 采 用蜗轮 蜗杆 以 实现 自锁 。 并
0 引 言
系统原 理清晰 , 工作 可 靠 , 能够 满足 机 器人 多种运 动
和操 作要 求 。
关键词 : S 控 制 系统 ; 肢体仿 生 机器 人 D P; 三
中图分 类号 : 2 2 TP 4
文献标 识码 : A
文章 编号 :0 1 2 7 2 0 ) 0— 0 3— 2 1 0 —2 5 ( 0 6 1 0 4 0
图 2 控 制 系 统硬 件 组 成
“ C+运 动 控 制 器 ” 式 , 中运 动 控 制 器 主要 以 P 模 其
基于DSP的机器人语言识别及控制系统设计

基于DSP的机器人语言识别及控制系统设计摘要:随着科技的快速发展和人工智能的兴起,机器人技术在日常生活和工业领域中扮演着越来越重要的角色。
人们对机器人的交互性和智能化要求也越来越高。
其中,机器人的语言识别和控制是实现人机交互的重要环节。
因此,基于DSP的机器人语言识别及控制系统的研究具有重要的现实意义。
本研究旨在设计和实现一种基于DSP的机器人语言识别及控制系统,以提升机器人的交互能力和智能化水平。
本研究的意义在于提升机器人的语言交互能力,进一步拓展机器人的应用领域。
同时,研究成果对于推动人工智能技术的发展,促进人机交互的进步具有重要意义。
关键词:DSP;机器人;语言识别;控制系统设计一、控制系统框架和架构如图一所示,基于DSP的机器人语言识别及控制系统设计主要分为两个部分:基于DSP的语音采集和识别部分以及基于FPGA的机器人动作控制部分。
图1系统原理框架图在语音采集和识别部分,首先使用麦克风或其他音频设备对人的语音信号进行采集。
采集到的语音信号经过预处理,包括去噪、滤波和增益控制等处理,以保证语音信号的质量。
接着,通过DSP芯片对语音信号进行进一步处理,将其二值化,即将连续的语音信号转化为数字化的信号。
DSP芯片利用数字信号处理算法,对语音信号进行特征提取和模式匹配,实现语音识别的功能。
通过与预先设定的语音指令进行比对和判断,DSP芯片能够确定用户的意图,并输出相应的动作指令。
在机器人动作控制部分,动作指令由DSP芯片输出后,进一步被传输到FPGA 芯片。
FPGA芯片根据动作指令的内容,生成相应的时序逻辑控制信号。
这些信号通过与步进电机及其驱动电路连接,控制机器人的运动。
例如,如果动作指令是向前移动,FPGA芯片会产生相应的控制信号,使步进电机按照预定的步进顺序完成机器人的前进动作。
通过FPGA的灵活性和高速计算能力,可以实现对机器人动作的精确控制。
基于DSP的语音采集和识别部分以及基于FPGA的机器人动作控制部分相互配合,形成一个完整的机器人语言识别及控制系统。
基于DSP的轮式移动机器人运动控制系统的研究
设 机器 人 在 t时 刻左 右 轮 的速 度 为 V 、V , o ( ( 则该 时刻机器 人的线 速度 V( 及 角速 度 ‘ 分别 为 : k J 1 ) (
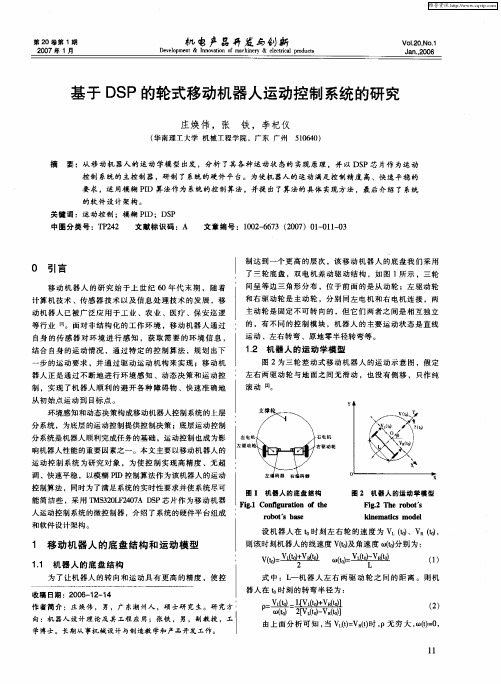
1 移 动 机 器 人 的 底 盘 结 构 和 运 动 模 型
11 机器 人的底 盘 结构 .
一
12 机器 人的运 动 学模型 .
图 2为三 轮差 动式 移 动机 器 人 的运动 示意 图 ,假 定 左右 两驱 动轮 与地 面 之 间无滑 动 ,也 没有 侧移 ,只作 纯
滚 动 闭 。
步 的运 动要 求 ,并通 过 驱动 运 动机 构来 实 现 ;移动 机
器人 正是 通过 不断 地进 行 环境 感 知 、动态 决策 和 运动 控 制 ,实现 了机 器人顺 利 的 避开 各种 障碍物 、快 速 准确 地 从初始 点运 动到 目标 点 。 环 境感知和动态决 策构成移 动机 器人控制 系统 的上层 分 系统 ,为底层 的运 动控制提供 控制决 策 ;底层运 动控制
向:机 器人 设计理论度 其工程应 用;张铁 ,男,副教 授 ,工 I 学博士。长期从事机械 设计与制造教 学和产品开发工作。 l
由上 面分 析 可 知 , V ( = I , 穷 大 , (= , 当 )V 【时 P无 t ) t t 0 o)
维普资讯
器 人在 t时刻 的转 弯半径 为 : o
p ;
作 者 简 介 :庄 焕 伟 , 男 ,广 东潮 州人 ,硕 士 研 究 生 。 研 究 方 一
VL ) L——— t t ] ( —V( + R0 o t [Ld V()
() 2
一
‘( 1 )
,ቤተ መጻሕፍቲ ባይዱ
、
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
移动机器人 ( o i o t作 为机 器人研 究领 域 的一个重 m bl rb ) e o
传_ 位机 , J : 进行远程监控 。同时 上位机可以对 自主移动机器人
要分支 , 在智能交通 、 空间探测 、 军事 、 生产 自动 化 、 农业 自动化 等许多领域都有广泛的应用 , 目前 已成 为机器人领域 的研究热
Hy i Ar hie t e Aut no o o l b tc De in Ba e o u t・ brd c tcur o m usM bi Ro o i sg s d n M liDSP e
T a gy,JN S i u ,S N i u U G n —i I h- n O G A — o j g
点之一。 笔者 提出了一种以 1 公司 3款 D P微处理器为核 心 , f 1 S 基于
进行必要的控制 , 如设定 目标点等 。
⑤系统小型化。要求体 积小 、 量轻 , 重 功耗 低 , 续工作时 连
问长 。
视觉和多传感器信息融合技术 的混合分层式体系结构的 自主移
动机器人 系统设计方案 , 并对其体系结构进行 了介绍 ,ห้องสมุดไป่ตู้对各处理 器在系统 中的功能和任务进行 了分析 。
外传感器 , 以及视觉传感器 , 如摄像头。一方面通过超声波和红 外传感器实现对远 近障碍物距 离的测量 , 同时通过摄 像头获得 图像信息 , 综合进行处理 , 实现对障碍物 的识别 。
① 同时定位和地图创建 。要求 自主移动机器人可 以通过各
种传 感器 实时地获得 自身状态信 息 , 当前 坐标 、 向角 、 如 方 速度 等; 同时还可以对周 围环境进 行探 测 , 知周 围障 碍物分 布情 获
2 感 知 系统
根据功能需求 , 自动移动机器人的感知系统可分为姿态感知 系统、 障碍探测系统、 导航定位 系统 、 环境感知系统 4个子系统 :
l 功 能 需 求
根据对应用需求进行分析 , 自主移动 机器人设计应 具有 以
下功能 :
①姿态感 知系统 。包括加速度传感器 和电子罗盘。一方面 对加速度传感器信号进行积 分获得速度 信息 , 测得移 动机器人 的运动状态 ; 同时通过读取 电子 罗盘信息获得 自主移 动机器人 当前地磁朝向角、 俯仰角和倾斜角信息。 ②障碍探 测系统 。包括非视觉传感器 , 如超声波传感器、 红
摘要 : 分析 了 自主 移动 机 器人 的功 能 需 求 , 出 了一 种 以 T S2 F 82 T S 2 D 6 2 T S2 V 5 1 提 M 3 0 21 、M 3 0 M 4 、 M 30 C 50为 微 处 理 器 的 混 合 式
结构 自主 移 动机 器人 设计 方 案 。 同时对 多 D P间高速 通 信 方 案进 行 了探 讨 , 各 处理 器在 系统 中的功 能 和任 务 进行 了分析 。 S 对 关键 词 : 自主 移 动 机 器人 ; S ; 合 式 结 构 D P混 中图 分 类 号 :P 4 T22 文 献 标 识 码 : A 文 章 编 号 :00— 8 9 2 0 )2— 0 8—0 10 82 (0 7 l 0 3 4
维普资讯
・
3 8・
《 测控技 术) 0 7年 第 2 20 6卷第 l 2期
基 于 多 D P的混 合 式结 构 自主移 动机 器 人设 计 S
涂 刚毅 , 世 俊 ,宋 爱 国 金
( 东南 大学 仪器科学 与工程学院 , 江苏 南京 2 09 ) 106
( c o l f n t me t c n ea d E gn e n ,S uh at nv r t S h o o s u n i c n n i er g o tes U ie i ,N nig 1 0 6 I r Se i s y aj 0 9 ) n2
Ab t a t T ef n t n rq i me to u o o u b l o o sa a y e , n n i d o l — P a tn mo s mo i o o c sr c : h u ci e u r o e n fa t n mo s mo i rb t n lz d a d o e k n fmut DS u o o u b l r b t e i i e i d sg h c sh ea c i a a c i cu e i p o o e . n t i d sg , MS 2  ̄ 8 2 ̄ MS 2 D 4 n MS 2 VC 5 0 a e u i e in w ih i irr h c l r h t tr s r p s d I h s e i T 3 0 e n 1 ' T 3 0 M6 2 a d T 3 0 5 1 r t ・ l e ly t e rl fmi rp o e s r B sd s a d e i u so n h g p e o i d t p a o eo co rc so . e i e , e p d s si n o ih s e d c mmu ia in b t e l — P i s d . z o h c nc t e o we n mu t DS sa o ma e i l
T n e e y mir p o e s r S f cin a d t s n ti y tm r n lz d he , v r c o r c s o ’ un to n a k i h ss se a e a ay e ,
Ke r s a tn mo smo i b t DS ; y f r htc u e y wo d : uo o u b l r o ; P h b d a c i t r eo e