结构力学总结[优质PPT]
合集下载
结构力学(全套课件131P) ppt课件
的两根链杆的杆轴可以平行、交叉,或延长线交于
一点。
当两个刚片是由有交汇点的虚铰相连时,两个刚
片绕该交点(瞬时中心,简称瞬心)作相对转动。
从微小运动角度考虑,虚铰的作用相当于在瞬时
中心的一个实铰的作用。
19
20
规则二 (三刚片规则): 三个刚片用不全在一条直线上的三个单铰(可以
是虚铰)两两相连,组成无多余约束的几何不变体 系。
两个平行链杆构成沿平行方向上的无穷远虚铰。
三个刚片由三个单铰两两相连,若三个铰都有交 点,容易由三个铰的位置得出体系几何组成的结论 。当三个单铰中有或者全部为无穷远虚铰时,可由 分析得出以下依据和结论:
1、当有一个无穷远虚铰时,若另两个铰心的连 线与该无穷远虚铰方向不平行,体系几何不变;若 平行,体系瞬变。
3、通过依次从外部拆除二元体或从内部(基础、 基本三角形)加二元体的方法,简化体系后再作分 析。
41
第一部分 静定结构内力计算
静定结构的特性: 1、几何组成特性 2、静力特性 静定结构的内力计算依据静力平衡原理。
第三章 静定梁和静定刚架
§3-1 单 跨 静 定 梁
单跨静定梁的类型:简支梁、伸臂梁、悬臂梁 一、截面法求某一指定截面的内力
15
1、单约束(见图2-2-2) 连接两个物体(刚片或点)的约束叫单约束。
1)单链杆(链杆)(上图) 一根单链杆或一个可动铰(一根支座链杆)具
有1个约束。 2)单铰(下图)
一个单铰或一个固定铰支座(两个支座链杆) 具有两个约束。 3)单刚结点
一个单刚结点或一个固定支座具有3个约束。
16
2、复约束 连接3个(含3个)以上物体的约束叫复约束。
三、对体系作几何组成分析的一般途径
结构力学讲义PPT课件

载移作用下的动力反应
结构受到的地震力
、
速
度
、
加
速
度
及
动
26
§1-2 结构计算简图
一、支座和支座反力
支座定义:把结构与基础联结起来的装置。 1. 固定支座
B
A
实际形状
工程实例
27
简图:
FxA A MA
FyA
特点: 1) 结构在支座截面不产生线位移和转角; 2) 支座截面有反力矩以及x、y方向的反力。
有 用在结构上。如:楼面活荷载,雪荷载。
结
36
2
.
按 固定荷载——作用位置不变的荷载,如自重等。
荷 移动荷载——荷载作用在结构上的位置是移动
载 的,如吊车荷载、桥梁上的汽车和火车荷载。
作 用
3. 按荷载作用的性质可分为:
位 静荷载——荷载的大小、方向、位置不随 时间
置 变化或变化很缓慢的荷载。恒载都是静 荷载。
结构力学
Structural Mechanics
1
目录
结构力学(I)
第一章 绪论 第二章 平面体系的几何构造分 析 第三章 静定结构的受力分析 第五章 影响线 第六章 静定结构的位移计算 第 七章 力法 第八章 位移法 第九章 渐近法
3
目录
结构力学(II) 第十 章 矩阵位移法 第十三章 结构的动力计算 第十五章 结构的塑性分析与极限荷载
可 动荷载 ——荷载的大小、方向随时间迅
分
为 速变化,使结构产生显著振动,结构的质量
: 承受的加速度及惯性力不能忽略。化爆和核
爆炸的冲击波荷载、地震荷载等都是动力荷
载。
37
四、线性变形体系
《结构力学总结复习》课件

2 动力响应
考虑结构在地震、风载等动力荷载下的响应,需要进行动力分析和优化。
3 可持续性设计
在设计过程中考虑结构的生命周期成本和环境影响,追求可持续性发展。
结构力学的学习资源和进一步研究建议
经典教材
《结构力学导论》、《结构力学 基础》等。
在线课程
如Coursera和edX上的结构力学课 程。
进一步研究
分析机械零件的受力情况,保证机械系统的正 常运行。
结构力学的重要性
1 安全性
结构力学可以评估结构的 强度和稳定性,确保其在 各种力的作用下不会发生 破坏。
2 效率Байду номын сангаас
通过优化结构设计,可以 最大程度地利用材料和资 源,提高结构的效率。
3 创新
结构力学为设计师提供了 工具和知识,鼓励创新和 设计出更具挑战性的结构。
阅读相关期刊论文,参与学术研 究和项目。
《结构力学总结复习》 PPT课件
结构力学是研究物体受力、变形和破坏行为的科学,它在工程领域具有重要 的应用价值。
结构力学的定义
结构力学是研究物体如何承受外部力以及对力的作用下物体的变形和破坏行为的学科。通过结构力学,我们可 以深入了解和预测各种结构的性能和行为。
结构力学的基本原理
1 牛顿第三定律
力的作用与反作用相等且 方向相反。
2 叠加原理
多个力的作用可以相互叠 加。
3 等效法则
将复杂的结构等效为简化 的模型,以简化计算。
结构力学的应用领域
建筑设计
帮助设计师评估和优化建筑结构的性能。
航天航空
研究飞机、火箭等载体的结构强度和稳定性。
桥梁工程
分析桥梁的受力情况,确保结构的安全和可靠 性。
考虑结构在地震、风载等动力荷载下的响应,需要进行动力分析和优化。
3 可持续性设计
在设计过程中考虑结构的生命周期成本和环境影响,追求可持续性发展。
结构力学的学习资源和进一步研究建议
经典教材
《结构力学导论》、《结构力学 基础》等。
在线课程
如Coursera和edX上的结构力学课 程。
进一步研究
分析机械零件的受力情况,保证机械系统的正 常运行。
结构力学的重要性
1 安全性
结构力学可以评估结构的 强度和稳定性,确保其在 各种力的作用下不会发生 破坏。
2 效率Байду номын сангаас
通过优化结构设计,可以 最大程度地利用材料和资 源,提高结构的效率。
3 创新
结构力学为设计师提供了 工具和知识,鼓励创新和 设计出更具挑战性的结构。
阅读相关期刊论文,参与学术研 究和项目。
《结构力学总结复习》 PPT课件
结构力学是研究物体受力、变形和破坏行为的科学,它在工程领域具有重要 的应用价值。
结构力学的定义
结构力学是研究物体如何承受外部力以及对力的作用下物体的变形和破坏行为的学科。通过结构力学,我们可 以深入了解和预测各种结构的性能和行为。
结构力学的基本原理
1 牛顿第三定律
力的作用与反作用相等且 方向相反。
2 叠加原理
多个力的作用可以相互叠 加。
3 等效法则
将复杂的结构等效为简化 的模型,以简化计算。
结构力学的应用领域
建筑设计
帮助设计师评估和优化建筑结构的性能。
航天航空
研究飞机、火箭等载体的结构强度和稳定性。
桥梁工程
分析桥梁的受力情况,确保结构的安全和可靠 性。
【经典】结构力学ppt课件
§2-3 几何不变体系的基本组成规则
二元体:两根不在一直线上的链杆连接成一个新结点的构 造称为二元体。
二元体规则 在一个体系上增加或拆除二元体,不会改变原有体系的几何构造性质。
铰结点
链杆
链杆 体系
§2-3 几何不变体系的基本组成规则
分析图示铰结体系
以铰结三角形123为基础,增加一个二元体得结点4, 1234为几何不变体系;如此依次增加二元体,最后的体系为几何不变体系,没 有多余联系。
瞬变体系
可变体系
瞬变体系
§2-7 几何构造与静定性的关系
体系
几何不变体系 (形状、位置不变)
几何可变体系 (形状、位置可变)
无多余联系 有多余联系
可变体系 瞬变体系
静定结构 超静定结构
§2-7 几何构造与静定性的关系 分析图a所示体系
分析图b所示体系
无多余联系的几何不变体系 由平衡方程→三个支反力 →截面内力→静定结构 有多余联系的几何不变体系 由平衡方程不能求全部反力
§2-1 概述
一般结构必须是 几何不变体系
几何不变体系—在不考虑材料应变的条件下,体系的位置 和形状是不能改变的。(图a)
几何可变体系—在不考虑材料应变的条件下,体系的位置和 形状是可以改变的。(图b)
§2-2 平面体系的计算自由度 自由度:确定体系位置所需的独立坐标数
一个点的自由度=2
一个刚片的自由度=2
第一章 绪论
§1-1 结构力学的研究对象和任务 §1-2 荷载的分类 §1-3 结构的计算简图 §1-4 支座和结点的类型 §1-5 结构的分类
§1-1 结构力学的研究对象和任务
结构:工程中担负预定任务、支承荷载的建筑物。 如:房屋、塔架、桥梁、隧道、挡土墙、水坝等。
说课结构力学总结.ppt

.精品课件.
15
▪ 刚架弯矩图的绘制
做法:拆成单个杆,求出杆两端的弯矩,按与单跨 梁相同的方法画弯矩图.
分段 定点 连线 迭加原理
▪ 结点规律 m2
m2
0
m m2
m1
m1 m1=m2
m1
m1=m2
m2 - m1 + m = 0 m1 - m2.=精品m课件.
m1
m2
m1=m2
16
绘M图的一些原则
三刚片规则:三个刚片通过三个不共线单铰两两相连,
组成几何不变体系。
二元体规则:在一个体系上增加或拆除二元体,不会
改变体系的机动性质
二元体:两根不共线链杆组成的装置
两刚片规则:两个刚片通过一个单铰及一根不过铰心
的链杆相连,或通过三根不全平行也不全交于一点的链 杆相连,组成几何不变体系
.精品课件.
5
3、三个规则的应用
k F SFSP ds GA
M M P ds EI
对于梁和刚架结构
kP
M M P ds EI
对于桁架
kP
N N P ds N N Pl
EA
EA
对于组合结构
kP
M M P ds EI
N NPl EA
(受弯杆)
(二力杆)
.精品课件.
33
6.图乘法
• 图乘法适用条件为 (1) EI=常数; (2) 杆轴线为直线; (3) 至少有一个为直线弯矩图。 • 图乘法的公式为
力法的思路是搭桥法。即:综合考虑结构的平衡条件、物理条 件和位移条件,将超静定结构的计算转化为静定结构的计算。 可见,力法计算实际上是对静定结构进行计算。
超静定计算问题 基本结构 静定计算问题
考研结构力学必看精华总结绪论PPT课件

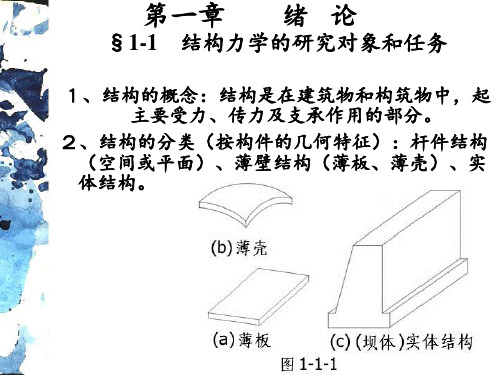
(2)板壳结构—也称薄壁结构。厚度要比长度和宽度小得多。例 如:楼板和壳体屋盖等。
(3)实体结构—长、宽、厚三个尺度大小相仿。例如:重力坝。
§1-1 结构力学的学科内容和教学方法
2 结构力学的研究对象
理论力学:着重讨论物体机械运动的基本规律;其余三门力学 着重讨论结构及其构件的强度、刚度、稳定性和动 力反应等问题,其中:
材料力学:以单个杆件为主要研究对象; 结构力学:以杆件结构为主要研究对象; 弹性力学:以实体结构和板壳结构为主要研究对象。
§1-1 结构力学的学科内容和教学方法
结构力学的任务: 讨论结构的组成规律和合理形式,结构计算简图的合理选择; 讨论结构内力和变形的计算方法,进行结构的强度和刚度的验算; 讨论结构的稳定性以及在动力荷载作用下的结构反应。
第1章 绪论
§1-1 结构力学的学科内容和教学要ቤተ መጻሕፍቲ ባይዱ §1-2 结构的计算简图和简化要点 §1-3 杆件结构的分类 §1-4 荷载的分类 §1-5 学习方法(略) §1-6 结构力学求解器简介(略)
§1-1 结构力学的学科内容和教学要求
1 结构 建筑物和工程设施中承受、传递荷载而起骨架作用的部分。 例如:房屋中的梁柱体系、水工建筑物中的闸门和水坝、桥 梁和隧洞等。 结构分类(从几何角度): (1)杆件结构—由杆件组成。杆件的几何特征是横截面尺寸要比 长度小得多。例如:梁、拱、桁架、刚架等。
6. 荷载的简化
结构承受的荷载分为体积力和表面力两大类。两者均简 化为作用在杆件轴线上的力。
荷载按其分布情况可简化为集中荷载和分布荷载。
§1-3 杆件结构的分类
(1)梁:是一种受弯构件,其轴线为直线。可以是单跨 的或多跨的。
(2)拱:其轴线为曲线,力学特点是在竖向荷载作用下 有水平支座反力(推力)。
(3)实体结构—长、宽、厚三个尺度大小相仿。例如:重力坝。
§1-1 结构力学的学科内容和教学方法
2 结构力学的研究对象
理论力学:着重讨论物体机械运动的基本规律;其余三门力学 着重讨论结构及其构件的强度、刚度、稳定性和动 力反应等问题,其中:
材料力学:以单个杆件为主要研究对象; 结构力学:以杆件结构为主要研究对象; 弹性力学:以实体结构和板壳结构为主要研究对象。
§1-1 结构力学的学科内容和教学方法
结构力学的任务: 讨论结构的组成规律和合理形式,结构计算简图的合理选择; 讨论结构内力和变形的计算方法,进行结构的强度和刚度的验算; 讨论结构的稳定性以及在动力荷载作用下的结构反应。
第1章 绪论
§1-1 结构力学的学科内容和教学要ቤተ መጻሕፍቲ ባይዱ §1-2 结构的计算简图和简化要点 §1-3 杆件结构的分类 §1-4 荷载的分类 §1-5 学习方法(略) §1-6 结构力学求解器简介(略)
§1-1 结构力学的学科内容和教学要求
1 结构 建筑物和工程设施中承受、传递荷载而起骨架作用的部分。 例如:房屋中的梁柱体系、水工建筑物中的闸门和水坝、桥 梁和隧洞等。 结构分类(从几何角度): (1)杆件结构—由杆件组成。杆件的几何特征是横截面尺寸要比 长度小得多。例如:梁、拱、桁架、刚架等。
6. 荷载的简化
结构承受的荷载分为体积力和表面力两大类。两者均简 化为作用在杆件轴线上的力。
荷载按其分布情况可简化为集中荷载和分布荷载。
§1-3 杆件结构的分类
(1)梁:是一种受弯构件,其轴线为直线。可以是单跨 的或多跨的。
(2)拱:其轴线为曲线,力学特点是在竖向荷载作用下 有水平支座反力(推力)。
结构力学复习 Microsoft PowerPoint 演示文稿
弯矩:等于截面一侧 所有外力对该截面形心力矩的代数和。
内力符号规定 FN FN FN FN FS FS FS FS
弯矩正负号无统一规定,对梁或拱,习惯上假定: M M
M
M
4). 绘内力图 绘图规定: 弯矩图绘在受拉纤维的一侧,不必注明正负号 轴力图 剪力图 可绘在杆件任一侧,但需注明正负号
图中数字统一注绝对值
MCD=10kNm C
MDC=28kNm
D
q=16kN/m C D
MCD=10kNm
MDC=28kNm D
l=4m
28kNm
C
q=16kN/m
10kNm
C
l=4m
D
32kNm
要点:先求 叠 MCD=10kNm q=16kN/m MDC=28kNm 出杆两端截 加 面弯矩值, 法 C 然后在两端 D 作 l=4m 弯矩纵矩连 弯 线的基础上 矩 28kNm 叠加以同跨 图 32kNm 度,同荷载 的简支梁的 弯矩图
用节点法求各杆内力
20kN 10kN 1 F1 α 2m 3 10kN 4 7 2m 8 2m F8
2
2m
5
2m
6
a.求支座反力
F1=30kN F8=10kN b.取结点列投影方程求杆内力
平面汇交力系
∑Fix =0
∑ Fiy =0
20kN 10kN 1 F1
y
10kN 4
F87
7
2m 8 2m F8
2. 截面法
当脱离体包含多个结点时,称截面法 脱离体包含不少于两个结点的桁架部分时 脱离体上受到的是平面任意力系,应用三个独 立的平衡方程求解,故一般切断的未知轴力的 杆件不多于三根。
第4章 结构的位移计算
工程力学之结构力学(PPT31页)

•工程力学之结构力学(PPT31页)培训课件培训讲义培 训ppt教程管 理课件 教程ppt
分析实例4
A
•工程力学之结构力学(PPT31页)培训课件培训讲义培 训ppt教程管 理课件 教程ppt
A
B
CD
E
上部体系与基础用不交 于一点的三根链杆相连
B
CD
E
再去掉二元体A
B
CD
E
先去掉基础
剩下BC,DE用两根平行链杆 相连,所以原体系是有一个自 由度的几何可变体系。
II
III
II III
I
I
几何不变体系
几何瞬变体系
三、增减二元体规则
一体系上增加或减少若干个二元体,不改变原体系的几何组 成。
二元体:两根不共线的链杆固定一个新结点的装置。如:
•工程力学之结构力学(PPT31页)培训课件培训讲义培 训ppt教程管 理课件 教程ppt
•工程力学之结构力学(PPT31页)培训课件培训讲义培 训ppt教程管 理课件 教程ppt
工程力学之结构力学(PPT31页) 工程力学之结构力学(PPT31页)
第2章
几何组成分析
Geometrical Constitution Analysis
目录
§2-1 几何组成分析的目的和概念 §2-2 几何不变体系的简单组成规则 §2-3 几何组成分析示例 §2-4 静定结构和超静定结构
§2-1 几何组成分析的目的和概念
装配过程通常有两种: 1、从基础出发构造
2、从内部刚片出发构造
•工程力学之结构力学(PPT31页)培训课件培训讲义培 训ppt教程管 理课件 教程ppt
•工程力学之结构力学(PPT31页)培训课件培训讲义培 训ppt教程管 理课件 教程ppt
结构力学知识点总结大全PPT共110页

▪
26、要使整个人生都过得舒适、愉快,这是不可能的,因为人类必须具备一种能应付逆境的态度。——卢梭
▪
27、只有把抱怨环境的心情,化为上进的力量,才是成功的保证。——罗曼·罗兰
▪
28、知之者不如好之者,好之者不如乐之者。——孔子
▪
29、勇猛、大胆和坚定的决心能够抵得上武器的精良。——达·芬奇
▪
30、意志是一个强壮的盲人,倚靠在明眼的跛子肩上。——叔本华
谢谢!
110
结构力学知识点总结大全
•
6、黄金时代是在我们的前面,而不在 我们的 后面。
•
7、心急吃不了热汤圆。
•
8、你可以很有个性,但某些时候请收 敛。
•
9、只为成功找方法,不为失败找借口 (蹩脚0、只要下定决心克服恐惧,便几乎 能克服 任何恐 惧。因 为,请 记住, 除了在 脑海中 ,恐惧 无处藏 身。-- 戴尔. 卡耐基 。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
例:作图示刚架的M图
mm
F
H
G
P C
D
h E
h
mm
附属部分 F
H
G
C m/h
基本部分
0
E m/h
0
A
B
l/2
l/2
m
m
C m/h
P D
E m/h
P/2 A
B P/2
Pl/2
Ph/2l
Ph/2l
Pl/2
M图
4 桁架
• 结点法 • 截面法 • 结点法和截面法的联合应用
• 结点受力规律
N1
N3 =0
• 非荷载因素的影响
非荷载因素不会使静定结构产生内力和反力。
• 平衡力系的影响
当平衡力系作用于静定结构的某一几何不变部分上时, 只有该部分受力,其它部分不受力。
• 荷载等效变换的影响
在静定结构的某一几何不变部分进行荷载等效变换时,只有该部 分受力状态发生变化,其余部分受力状态保持不变。
三、结构位移计算
若
1
,则
2
N1N2若 Nhomakorabea1
,则
2
N1
N2,
但
N1和N2
同号
例:
P
例:
P
例:
P
例:
P
+
-+
--
5 三铰拱
• 支座反力的计算
VA H
VA0
M
0 C
f
VB VB0
a2
b2
a1
b1
C
P1
P2
HA A VA
f
l1 l
B HB
l2
VB
• 内力的计算
M M 0 Hy
Q
Q
0
c
os
H
s
in
N Q0 sin H cos
1 虚功与实功
⊿11
P1
1
2
P1
位移下标的意义:
第一个下标:表示位移的地点和方向 第二个下标:表示产生该位移的原因
1
2
⊿12
PP11
P2
P2
实功:力在自身所引起的位移上所做的功 虚功:力在别的原因的位移上所做的功
T实
1 2
P111
T虚 P112
2. 位移的概念 由于变形,结构上各点、各截面位置将发生改变,各点、各 截面位置改变量,称为位移。 按照位移的性质,结构的位移可分为线位移和角位移。 按照相对关系,位移可分为绝对位移和相对位移。
▪ 符号规定: N
Q
N M 不规定符号
Q
▪ 作图规定:N图、Q图—绘在杆件的任一侧,但要注明符号 M图—绘在杆件的受拉侧
▪ 刚架弯矩图的绘制
做法:拆成单个杆,求出杆两端的弯矩,按与单跨 梁相同的方法画弯矩图.
分段 定点 连线 迭加原理
▪ 结点规律 m2
m2
0
m m2
m1
m1 m1=m2
m1
m1=m2
求位移状态中的位移 → 虚力原理
虚位移原理 → 求力 虚力原理 → 求位移
N2
N1=N2=0
N1
N2
N1=N2
N1 N4
N1=N2
N3 N2
N3=N4
N3 α2 N2
α1 N1 N4 N1 α1 α2 N2
N3
若 1 2 ,则 N1 N2 , N3 N4
若 1 2 ,则 N1 N2 , 但 N1和 N2 反号
若 N1=0,则 N2 0;若 N2 =0,则 N1 0
mBB
mA
mB
P
+
mB Pl/4
M图的迭加不是图形的简单拼凑,而是竖标迭加
2 多跨静定梁 多跨静定梁的组成 基本部分--能独立
附属部分--不能独 承载的部分。 立承载的部分。
多跨静定梁的内力计算:先附后基
3 静定平面刚架
▪ 刚架:若干不共线杆件通过若干刚结点连接,组成的结构
▪ 平面刚架:刚架中的所有杆件和荷载均位于同一平面内
• W<0,有多余联系 2、简化
• 去二元体
• r =3,且三根支座链杆不全平 行也不交于同一点,可只考 虑体系本身 • 代换
3、取刚片,并形成扩大刚片,这 些刚片之间必须两两之间存在 足够的联系
4、利用规则得结论
• 二元体
C C
A
B
A
B
可去 二元体 不可去 二元体
二、静定结构的内力计算 1 单跨静定梁
P1
A
VA0
C
M0 C
P2
B
VB0
合理拱轴 拱中各截面弯矩为零时对应的拱轴
Q=0 ?
M M 0 Hy
Q
Q
0
c
os
H
sin
N Q0 sin H cos
y M0 H
三铰拱的合理拱轴线
荷载 三铰拱顶铰的位置 三铰拱,两铰拱,无铰拱的合理拱轴线
6 静定结构的特性
• 解答的唯一性
对于静定结构而言,满足平衡条件的内力反力,有且仅有唯一解。
组成几何不变体系。
二元体规则:在一个体系上增加或拆除二元体,不会
改变体系的机动性质
二元体:两根不共线链杆组成的装置
两刚片规则:两个刚片通过一个单铰及一根不过铰心
的链杆相连,或通过三根不全平行也不全交于一点的链 杆相连,组成几何不变体系
3、三个规则的应用
步骤:
1、计算W
• W>0,常变体系
• W=0,无多余联系 每杆只能用一次
结构力学复习
一、平面体系的机动分析
1 基本概念
刚片:几何形状不能变化的平面物体 自由度:确定体系位置所需的独立坐标数 约束(联系):能减少自由度的装置
一根链杆——1个联系 一个单铰——2个联系——2根链杆
几何不变体系:若不考虑变形,荷载下形状 不发生改变的体系
几何常变体系:荷载下形状发生改变的体系 几何瞬变体系:形状发生瞬时改变的体系
m2 - m1 + m = 0 m1 - m2 = m
m1
m2
m1=m2
绘M图的一些原则
• 凡有悬臂杆段、简支杆段,可先绘其M图 • 直杆无荷载作用杆段, M图为直线 • 剪力相等的平行杆段, M图也平行 • 含滑动连接的杆段(两平行链杆与杆段平行),
M图为平行线 • 铰处若无集中力偶作用, M=0 • 对称性 • 区段迭加原理
3 变形体系的虚功原理 变形体系处于平衡状态的充要条件是,对于任何虚位移,外力 在虚位移上所做虚功等于内力在虚变形上所做的变形虚功。
虚功方程 FΔ FNdu FS ds Md
虚功原理的应用
• 给定力状态,虚设位移状态,利用虚功方程
求力状态中的力 → 虚位移原理
• 给定位移状态,虚设力状态,利用虚功方程
▪ 内力图规律
荷载 内力图
Q图 M图
q=0 q=C 区段 区段
P点
m点
铰支端
无m 有m
水平线 斜直线 有突变 无变化 无变化 无变化
斜直线 抛物线 有尖角 有突变 0
m
P
L/2
L/2
P
Q图
M图 PL/4
q
L
qL2/8
Q图 M图
m
a
b
m
Q图 M图
m
m M图
• M图的迭加原理
mA
P
mB
mA
mmAA PPll//44
几何可变体系
几何不变体系
A
C
B
几何常变体系
几何瞬变体系
几何可变体系
联系:链杆、单铰、复铰
W—自由度,m—刚片数,h—单铰数,r—支座链杆数
W = 3m - (2h+r) 若有复铰,则要换算成单铰。
连接n个刚片的复铰,相当于 (n-1)个单铰。
2 几何不变体系的简单组成规则
三刚片规则:三个刚片通过三个不共线单铰两两相连,