汽车操纵稳定性研究的发展与展望
操纵稳定性介绍

1、问题的由来
“反应迟钝”:驾驶员转向指令已发出相当时间,但汽车还 没有转向反应,或转向过程完成的过慢。 “丧失路感”:正常汽车的转弯的程度,会通过转向盘在驾 驶员手上产生相应的感觉。有些操纵性能不好的汽车,在车 速较高或急剧转向时会丧失这种感觉。这会增加驾驶员的操 纵困难或影响驾驶员做出正确的判断。 “晃”:驾驶员给出稳定的转向指令,但汽车却左右摇摆, 行驶方向难于稳定。
2、操纵稳定性概念
汽车的操纵稳定性是指在驾驶者不感到过分紧张、疲劳的条 件下,汽车能遵循驾驶者通过转向系及转向车轮给定的方向 行驶,且当遭遇外界干扰时,汽车能抵抗干扰而保持稳定行 驶的能力。 汽车的操纵稳定性不仅影响到汽车驾驶的操纵方便程度,而 且也是决定高速汽车安全行驶的一个主要性能,所以人们称 之为“高速车辆的生命线”。汽车的操纵稳定性日益受到重 视,已成为衡量现代汽车的主要性能之一 。
6、操稳的评价标准
(1)GB/T 6323.1-1994《蛇行试验 》; (2)GB/T 6323.2-1994《角阶跃输入特性试验 》; (3)GB/T 6323.3-1994《角脉冲输入特性试验 》; (4)GB/T 6323.4-1994《回正性能试验 》; (5)GB/T 6323.5-1994《转向轻便性能试验 》; (6)GB/T 6323.6-1994《稳态回转试验 》; (7)QC/T 480-1999《汽车操纵稳定性指标限值与评价方 法 》。
4、操稳分析内容
汽车的操纵稳定性涉及的问题较广泛,它需要采用较多的物理参量从多方 面进行评价
4、操稳分析内容
5、操稳评价方法
汽车性能最后通过试验来进行测定与评价。试验中的性能评 价有主观评价 客观评价 主观评价和客观评价 客观评价法是通过测试 主观评价 客观评价两种方法。客观评价法 客观评价法 仪器测出表征性能的物理量如横摆角速度、侧向加速度、转 向力等来评价操纵稳定性的方法。主观评价法 主观评价法就是感觉评价, 主观评价法 其方法是让试验评价人员根据试验时自己的感觉来进行评价, 并按规定的项目和评分方法进行评分。
操纵稳定性论文 (2)

汽车操纵稳定性的研究摘要:汽车操纵稳定性是决定汽车安全行驶的一个主要性能,本文主要论述了汽车操纵稳定性的研究进展及其影响因素,然后通过试验(稳态回转试验、转向回正试验等等)对汽车操纵稳定性进行定性测定和评价,并提出了汽车操纵稳定性研究存在的问题及发展前景。
关键词:汽车;操纵稳定性;影响因素;评价;试验The Research of the VehicleHandling and StabilityAbstract: The vehicle handling and stability is decided to the safety driving of a major performance, this paper mainly discusses the research progress of the vehicle handling and stability and its influence factors, and then through the test (steady-state test, turning back to the positive test, etc.) on the vehicle steering and stability for qualitative determination and evaluation,and puts forward the vehicle handling and stability the problems of the research and development prospects.Key words:car; handling and stability; influencing factors; evaluation; test引言汽车操纵稳定性是指驾驶者在不感到过分紧张、疲劳的条件下,汽车能遵循驾驶者通过转向系及转向车轮给定的方向行驶,且当遭遇外界干扰时,汽车能抵抗干扰并保持稳定行驶的能力[1]。
汽车操纵稳定性的影响因素分析

汽车操纵稳定性的影响因素分析首先,车身结构是影响汽车操纵稳定性的重要因素之一、车身结构的稳定性直接影响汽车在行驶过程中的稳定性。
在现代汽车中,多采用刚性车身结构,通过增加车身承受力和减小车身变形来提高操纵稳定性。
此外,也可以通过设置加强材料和合理的技术来增强车身结构的稳定性。
其次,悬挂系统也是影响汽车操纵稳定性的重要因素之一、悬挂系统是汽车传递和吸收路面不平衡的重要组成部分。
合理的悬挂系统可以提供更好的动力传递和路面适应能力,从而增强汽车的操纵稳定性。
常见的悬挂系统包括独立悬挂、麦弗逊悬挂和多连杆悬挂等。
每种悬挂系统都有其特点和适用范围,根据车辆的具体需求选择合适的悬挂系统可以提高操纵稳定性。
此外,轮胎也是影响汽车操纵稳定性的重要因素之一、轮胎是汽车与地面直接接触的部分,其对操纵稳定性的影响非常明显。
轮胎的胎压、胎面宽度、花纹设计等都会对汽车的操纵稳定性产生影响。
保持合适的轮胎胎压和选择适合路面状况的轮胎类型可以提高汽车的操纵稳定性。
此外,制动系统和转向系统也会对汽车的操纵稳定性产生影响。
制动系统的性能直接影响汽车在制动过程中的稳定性,制动系统工作正常、制动力分配合理可以提高汽车的操纵稳定性。
转向系统的灵活性和准确性对汽车的操纵稳定性也有很大的影响,一个优秀的转向系统可以提供更好的转向操控性能,从而提高操纵稳定性。
最后,车辆动力系统也是汽车操纵稳定性的影响因素之一、动力系统的平衡性和输出能力直接影响汽车在行驶过程中的稳定性。
一个动力系统输出平稳、动力响应灵敏的汽车会具有更好的操纵稳定性。
综上所述,影响汽车操纵稳定性的因素有车身结构、悬挂系统、轮胎、制动系统、转向系统和车辆动力系统等。
通过合理选择车辆的配置和维护保养车辆的各个部分,可以提高汽车的操纵稳定性,保证驾驶员和乘客的安全。
新能源汽车车身稳定性控制系统的研究与优化
新能源汽车车身稳定性控制系统的研究与优化随着全球对环境保护和能源替代的日益重视,新能源汽车作为一种清洁能源交通工具受到了广泛关注。
新能源汽车的发展不仅可以有效减少对传统石油能源的依赖,还可以降低运行成本、减少尾气排放,对环境友好。
然而,新能源汽车也面临着一些挑战,其中之一就是车辆的稳定性控制系统设计与优化问题。
在过去的几年里,随着新能源汽车技术的不断完善和发展,车身稳定性控制系统成为了研究的热点之一。
车身稳定性控制系统是指通过传感器感知车辆当前的状态,运用控制算法调整发动机、制动系统等车辆部件的工作状态,以提高车辆在不同路况下的操控性、稳定性和安全性。
该系统的设计和优化对于保障新能源汽车的安全性和性能至关重要。
为了提高新能源汽车的车身稳定性控制系统的性能,需要对系统进行深入的研究和优化。
首先,需要对车辆在不同路况下的动力学特性进行分析,以建立车辆稳定性控制系统的数学模型。
然后,可以根据建立的模型设计相应的控制算法,从而实现对车辆的稳定性控制。
同时,还可以通过机电一体化技术和智能控制技术来提高系统的自适应性和灵活性,以适应复杂多变的路况和驾驶环境。
在系统设计和优化过程中,还需要考虑到不同车辆型号和不同驾驶习惯对车身稳定性控制系统的影响。
通过对不同车辆和不同驾驶模式的实际测试数据进行分析和比对,可以优化系统的参数设置和控制策略,以提高系统的响应速度和稳定性。
此外,还可以采用先进的传感器技术和数据处理算法来提高系统的感知性能和准确性,确保系统对车辆状态的实时监测和反馈。
除了技术创新,车身稳定性控制系统的研究与优化还需要考虑到制度和的支持。
相关部门部门可以通过出台相关和标准来规范新能源汽车的车身稳定性控制系统设计和生产,促进系统技术的不断完善和推广应用。
同时,还需要加强对新能源汽车技术的宣传和推广,提高社会对新能源汽车的认知度和接受度,从而推动新能源汽车的发展和普及。
让我们总结一下本文的重点,我们可以发现,新能源汽车车身稳定性控制系统是新能源汽车技术研究的重要方向之一,其设计和优化对于提高车辆的操控性、稳定性和安全性具有重要意义。
汽车操纵稳定性的研究与评价

汽车操纵稳定性的研究与评价随着汽车工业的不断发展,汽车性能得到了显著提升。
汽车操纵稳定性作为衡量汽车性能的重要指标之一,直接影响着驾驶者的操控感受和行车安全。
因此,对汽车操纵稳定性进行深入研究,提高其评价水平,对于提升汽车产品竞争力具有重要意义。
汽车操纵稳定性研究主要涉及车辆动力学、控制理论、机械系统等多个领域,其目的是在各种行驶条件下,保证汽车具有良好的操控性能和稳定性。
然而,目前汽车操纵稳定性研究仍存在一定的问题,如评价标准不统测试条件不完善等,制约了其发展。
汽车操纵稳定性对于保证驾驶安全具有重要意义。
在行驶过程中,车辆受到外部干扰或自身惯性力的影响,容易导致车身失稳,从而引发交通事故。
良好的汽车操纵稳定性通过有效抑制车身晃动、调整轮胎磨损,为驾驶者提供稳定的操控感,降低交通事故风险。
影响汽车操纵稳定性的因素主要包括以下几个方面:(1)车辆动力学性能:车辆的加速、减速、转弯等动力学性能直接影响驾驶者的操控感受和行车安全。
(2)轮胎性能:轮胎的抓地力、摩擦系数等性能对车辆的操控性和稳定性具有重要影响。
(3)悬挂系统:悬挂系统的设计直接影响车辆的侧倾、振动等特性,从而影响操纵稳定性。
(4)驾驶者的操控技巧:驾驶者的预判、反应速度、操控技巧等直接影响车辆的操纵稳定性。
为提高汽车操纵稳定性,需要采取相应的控制策略。
其中,最重要的是采取主动控制策略,包括:(1)防抱死制动系统(ABS):通过调节制动压力,防止轮胎抱死,提高制动过程中的稳定性。
(2)电子稳定系统(ESP):通过传感器实时监测车辆状态,对过度转向或不足转向进行纠正,保证车辆稳定行驶。
(3)四轮驱动(4WD):通过将驱动力分配到四个轮胎上,提高车辆的加速性能和操控稳定性。
汽车操纵稳定性的评价主要从以下几个方面进行:(1)侧向稳定性:评价车辆在侧向受力情况下的稳定性。
(2)纵向稳定性:评价车辆在纵向受力情况下的稳定性。
(3)横向稳定性:评价车辆在横向受力情况下的稳定性。
车辆稳定性研究报告

车辆稳定性研究报告一、引言随着汽车工业的飞速发展,车辆稳定性对于行车安全的重要性日益凸显。
据统计,我国每年因车辆稳定性问题导致的交通事故数量居高不下,给人民生命财产安全带来严重威胁。
因此,研究车辆稳定性对于预防交通事故、提高行车安全具有重要意义。
本报告以车辆稳定性为研究对象,旨在探讨影响车辆稳定性的因素,分析现有技术的优缺点,并提出改进措施。
本研究问题的提出主要基于以下背景:一方面,车辆稳定性问题涉及多个因素,如车辆结构、驾驶行为、道路条件等,这些因素相互交织,增加了研究难度;另一方面,随着新能源汽车、智能网联汽车的推广,车辆稳定性问题愈发复杂。
因此,有必要对车辆稳定性进行深入研究。
研究目的与假设:1. 分析影响车辆稳定性的主要因素,提出相应的评价指标;2. 对比现有车辆稳定性控制技术的优缺点,探讨技术发展趋势;3. 基于研究结果,提出改进车辆稳定性的措施,并通过实验验证其有效性;4. 假设通过优化车辆稳定性控制策略,可以有效降低交通事故发生率。
研究范围与限制:1. 研究对象为乘用车,不考虑其他类型车辆;2. 研究主要针对车辆在直线行驶和转弯过程中的稳定性问题;3. 本报告所涉及的数据、实验和结论均基于国内实际情况。
本报告将系统、详细地呈现研究过程、发现、分析及结论,以期为提高我国车辆稳定性及行车安全提供参考。
二、文献综述国内外学者在车辆稳定性领域已进行了大量研究,形成了丰富的理论框架和研究成果。
早期研究主要关注车辆动力学模型建立,如阿克曼转向几何原理、车辆侧向力分配等。
随着控制理论的发展,研究者开始探讨车辆稳定性控制策略,如PID控制、滑模控制等。
在理论框架方面,研究者提出了基于车辆动力学模型的稳定性评价指标,如侧向加速度、横摆角速度等。
同时,针对不同行驶工况,如直线行驶、转弯、制动等,研究者也提出了相应的稳定性控制方法。
主要研究发现如下:1. 车辆稳定性受多因素影响,包括车辆结构、驾驶行为、道路条件等;2. 稳定性控制技术能有效提高车辆行驶安全性,降低交通事故发生率;3. 不同的稳定性控制策略具有不同的优缺点,如PID控制简单易实现,但参数调节困难;滑模控制鲁棒性强,但存在抖振问题。
汽车动力学稳定性控制系统研究现状及发展趋势

2006年2月农业机械学报第37卷第2期汽车动力学稳定性控制系统研究现状及发展趋势3李 亮 宋 健 祁雪乐 【摘要】 汽车动力学稳定性控制系统(D SC )是汽车主动安全电控系统的重要研究前沿,是继ABS 之后需要进行重点突破的汽车主动安全控制系统。
收集、整理并研究了国内外关于D SC 的研究文献和开发的产品,系统总结了D SC 研究的关键问题:系统建模、控制策略、控制器开发、性能评估等4个方面的研究现状,为D SC 研发提供参考。
关键词:汽车 动力学控制系统 主动横摆力偶矩控制 制动防抱死系统 控制策略 控制器中图分类号:U 463.2文献标识码:AI nvestiga tion and D evelopm en t of Veh icle D ynam icsStab il ity Con trol SystemL i L iang Song J ian Q i Xuele(T sing hua U n iversity )AbstractT he veh icle dynam ics stab ility con tro l (D SC )system is an i m po rtan t advanced research field ,and is also the veh icle active safety con tro l system after AB S w h ich needs to be b roken th rough .B y co llecting ,classificating and studing of the ach ievem en ts on D SC research and its p roducts ,the system m odeling ,con tro l strategy ,the con tro ller developm en t ,p erfo rm ances evaluati on on the D SC w ere summ arized fo r the D SC developm en t .Key words V eh icles ,D ynam ics con tro l system ,A YC ,AB S ,Con tro l strategy ,Con tro ller收稿日期:200410273国家自然科学基金资助项目(项目编号:50575120)李 亮 清华大学汽车安全与节能国家重点实验室 博士生,100084 北京市宋 健 清华大学汽车安全与节能国家重点实验室 教授 博士生导师祁雪乐 清华大学汽车工程系 硕士生 引言汽车动力学稳定性控制系统(D SC )是汽车电控的研究前沿。
汽车操纵稳定性标准

汽车操纵稳定性标准汽车操纵稳定性是指汽车在行驶过程中对驾驶员操纵指令的响应和车辆稳定性的表现。
操纵稳定性标准是衡量汽车安全性能的重要指标之一,对于保障驾驶员和乘客的安全具有重要意义。
首先,汽车操纵稳定性标准受到多种因素的影响。
其中,车辆的悬挂系统、转向系统、制动系统、轮胎和车辆质量等都会对操纵稳定性产生影响。
悬挂系统的设计和调校直接影响了车辆在转弯时的稳定性和平顺性,转向系统的精准度和灵敏度会影响驾驶员对车辆方向的控制,而制动系统的灵敏度和制动距离则直接关系到车辆的操纵安全性。
此外,轮胎的抓地力和车辆质量的分布也会对操纵稳定性产生重要影响。
其次,为了保障汽车操纵稳定性的标准,制定相应的技术规范和测试标准是非常必要的。
在技术规范方面,需要对汽车的悬挂系统、转向系统、制动系统等进行详细的设计要求和性能指标,确保其能够满足操纵稳定性的要求。
在测试标准方面,需要建立相应的测试方法和测试流程,对车辆在不同路况和操纵条件下的操纵稳定性进行全面的测试评估。
只有通过严格的技术规范和测试标准,才能够确保汽车的操纵稳定性达到标准要求。
此外,对于汽车操纵稳定性标准的监督和管理也是非常重要的。
相关部门需要建立健全的监督体系,对汽车制造企业进行定期的检查和评估,确保其生产的汽车能够符合操纵稳定性标准。
同时,还需要建立消费者投诉和举报机制,让消费者能够及时反映汽车操纵稳定性方面的问题,从而促使企业改进产品质量,保障消费者的安全。
总之,汽车操纵稳定性标准是保障汽车安全性能的重要指标,需要综合考虑车辆的悬挂系统、转向系统、制动系统、轮胎和车辆质量等多个因素,制定相应的技术规范和测试标准,并建立健全的监督和管理体系。
只有这样,才能够确保汽车在行驶过程中具有良好的操纵稳定性,保障驾驶员和乘客的安全。
汽车动力学稳定性控制系统研究现状及发展趋势

行重点突破的 汽 车 主 动 安 全 控 制 系 统1收 集2整 理 并 研 究 了 国 内 外 关 于 *+,的 研 究 文 献 和 开 发 的 产 品.系 统 总 结
了 *+,研 究 的 关 键 问 题3系 统 建 模2控 制 策 略2控 制 器 开 发2性 能 评 估 等 4个 方 面 的 研 究 现 状.为 *+,研 发 提 供 参
图 \ 带有预瞄的 +EH示意图 ’()*\ EO.14327aNP13.+EHb(1313.a,.-(.b(6)
c "#$控制策略与算法
控 制 策 略 和 算 法 的 开 发 是 +EH开 发 的 核 心 工 作<在光滑的路面上进行控制时横摆角速度和横向 加速度不对应8因 此 横 摆 角 速 度 和 侧 偏 角 都 必 须 加 以控制9%=Y%F;8如图 :所示<
J "#$建模与仿真
建 立 精 确 的 整 车 模 型 8是 进 行 系 统 仿 真 的 关 键 < 两轮模型 参 数 简 单8能 够 考 虑 纵 向W横 向 运 动 控 制8 是 动 力 学 控 制 系 统 开 发 常 用 模 型 <基 于 该 模 型 8开 发 了 侧偏 角 估 算 算 法8侧 向 速 度 估 算 算 法 < 9%X; 但 在 进 行环仿真分析过 程 中8一 般 采 用 四 轮 多 自 由 度 汽 车 仿 真 分 析 模 型 8可 以 考 虑 悬 架 W轮 胎 W车 身 的 非 线 性 8 以及汽车的动态 非 线 性8能 够 较 为 精 确 地 反 映 汽 车 的 动 态 特 征9%%Y < %M;
2000 年 豪华婚车 PK 个性婚车 流行婚车:凯迪拉克、奔驰、个性
汽车操纵稳定性主观评价试验方法

文献综述
文献综述
在已有的文献中,对于汽车操纵稳定性的主观评价主要采用问卷调查、模糊评价等方法,这些方法虽 然在一定程度上可以反映汽车的操纵稳定性,但是存在评价结果不够客观、评价标准不统一等问题。
研究现状
目前,国内外对于汽车操纵稳定性的主观评价研究主要集中在建立客观评价体系、制定评价标准等方 面,但是这些研究还存在着一定的不足之处,需要进一步完善和发展。
结果评估
根据主观评价标准和数据处理结果,对车辆的操纵稳定性进行 评价。
建议反馈
根据评估结果,提出针对性的改进建议,为车辆设计和性能优 化提供参考。
03
试验方法的应用
车辆选择与准备
车辆选择
应选择具有代表性的汽车,包括不同品牌、型号、配置和性能的车辆,以确保试验结果的广泛适用性 。
车辆准备
进行试验前,应对车辆进行详细检查和预处理,确保其处于正常工作状态,并安装必要的仪器和设备 ,如GPS定位仪、速度传感器等。
中的表现进行评估。
结论总结果,对车辆的操纵稳定性进行总结, 指出其优点和不足之处,并提出相应的改进建议。
要点二
建议提出
针对车辆操纵稳定性的不足之处,提出具体的改进方案 和建议,包括优化车辆结构设计、调整悬挂系统参数、 改进驾驶辅助系统等,以提高车辆的操纵稳定性和驾驶 安全性。
《汽车操纵稳定性主观评价 试验方法》
2023-10-29
目录
• 引言 • 主观评价试验方法 • 试验方法的应用 • 试验结果分析 • 结论与展望
01
引言
背景介绍
汽车工业的发展
随着汽车技术的不断进步,对于汽车的操纵稳定性要求也越 来越高,因此需要一种主观评价试验方法来评估汽车的操纵 稳定性。
李亮--汽车动力学稳定性控制研究进展

本人在2008年,提出了汽车失稳临界区域概念,界定ESP由稳定滑向失稳过程,临界 失稳时汽车由准稳态向瞬态非线性快速过度,过度时间100ms量级。
nonlin _ wr
μe μe
0.8 0.6 0.4 0.2
0 0 0.1
基于ay偏差的μe
0.8
0.6
基于横摆偏差的μe
附 着
0.4
估
0.2
算
0.3 0.5 0.7 0.9
0 0
0.5
1
1.5 偏
ay偏差/(m/s2)
e1
横摆角速度偏差/(rad/s)
e2
仲裁模块
e (e1 e2 ) ? e1 : e2
估计
成果发表在 Int. J. Veh Design,Inaˆ ty. J.
EKF 卡 尔 轮缸压力(估算) V y 曼 滤 波 侧 轮速
侧向速度 向 速 度 观 车速(估算)
Auto
Tec测h 等
SCI
期
纵向加速度
刊横摆上角速,度
土
耳
其
Toosi
科
技
大
学
Khaknejad 教授认为“提出了一种侧预估偏侧向估加算速度算法,并在不同路前面一上时刻验侧证向速了度其鲁棒性”,韩国
三、失稳过程测量与预判
3
失稳预判
稳定性预测判据
转向可响应分析
滑动离散傅里叶变换(SDFT)法
① 初始化(DFT)
N 1
X k (1) x(n)e j 2 kn/ N n0
2023年车身稳定控制系统(ESC)行业市场分析现状

2023年车身稳定控制系统(ESC)行业市场分析现状车身稳定控制系统(ESC)是一种现代汽车安全技术,旨在提高车辆的稳定性和控制性能。
它是一种电子系统,通过传感器和控制单元监测车辆的运动状态,并在需要时自动调整刹车力和引擎输出,以保持车辆的稳定性。
随着人们对安全驾驶的日益重视,车身稳定控制系统在汽车行业的市场份额不断增加。
根据统计数据显示,从2018年到2025年,全球车身稳定控制系统市场的年复合增长率预计将达到7.3%。
这一增长主要受益于以下几个因素。
首先,政府对汽车安全的法规要求不断加强。
以欧洲为例,自2014年起,所有新型轿车和小型货车都必须配备车身稳定控制系统。
这样的法规推动了车身稳定控制系统市场的增长,并促使其他国家和地区采取类似的措施。
其次,消费者对汽车安全性的意识不断提高。
车身稳定控制系统可以帮助驾驶员在发生潜在事故时保持对车辆的控制,减少事故风险。
作为主要的汽车市场,中国和美国的消费者对安全驾驶的需求较高。
此外,车身稳定控制系统的技术不断创新和进步。
随着传感器和控制单元的性能提高,车身稳定控制系统的功能得到了增强,可以在更广泛的驾驶条件下工作,并提供更精确的控制。
然而,车身稳定控制系统市场也面临一些挑战。
首先,车身稳定控制系统的成本较高,这使得一些经济发展水平较低的国家和地区无法广泛采用。
其次,技术标准的不一致可能限制了该市场的增长。
不同国家和地区对车身稳定控制系统的要求和测试标准不一致,这给制造商带来了一定的挑战。
综上所述,车身稳定控制系统市场的前景十分广阔。
随着汽车安全意识的提高和政府法规的推动,车身稳定控制系统的需求将继续增长。
未来,随着技术的不断进步和成本的降低,车身稳定控制系统将进一步普及,为驾驶员提供更高的安全性和舒适性。
汽车操纵稳定性道路试验测试方法研究
汽车操纵稳定性道路试验测试方法研究汽车操纵稳定性是指车辆在行驶过程中保持平稳、可控的能力。
这是一个非常重要的指标,直接影响车辆的安全性能和驾驶舒适性。
为了评估和测试车辆的操纵稳定性,需要进行道路试验。
本文将研究汽车操纵稳定性道路试验测试方法。
在进行道路试验时,一般采用以下几种测试方法。
首先是曲线行驶测试。
这项测试是通过在特定的道路上,让车辆以一定的速度行驶,进行曲线转弯。
测试时需要记录车辆横向加速度、方向盘转角等参数。
曲线行驶测试可以评估车辆在转弯时的操控稳定性和抓地力。
其次是蛇形行驶测试。
这项测试是让车辆在连续的左右变道中行驶。
测试时需要记录车辆的姿态变化、横向加速度等参数。
蛇形行驶测试可以评估车辆的侧倾稳定性和方向盘的响应能力。
第三是紧急避障测试。
这项测试是模拟紧急情况下的避让障碍物动作。
测试时需要记录车辆的刹车距离、避障动作的稳定性等参数。
紧急避障测试可以评估车辆的刹车性能和操控的可靠性。
最后是稳定性控制系统测试。
现代汽车普遍配备了稳定性控制系统,用于提高车辆的操纵稳定性。
测试时可以模拟车辆在不同路面条件或动态情况下的行驶,评估稳定性控制系统的效果。
在进行道路试验测试时,需要注意以下事项。
首先是确保测试道路的光滑度和平面度。
道路的几何形状会影响到车辆的操控稳定性,因此应选择平整度较高的道路进行测试。
其次是选择合适的测试速度。
测试速度应当符合实际的行驶条件,同时注意遵守交通规则和安全要求。
第三是对测试数据进行准确记录和分析。
记录准确的测试数据是评估车辆操纵稳定性的基础,对于数据的处理和分析可以通过计算机辅助模拟或专业软件进行。
最后是综合考虑试验结果。
道路试验只是评估车辆操纵稳定性的一种方法,还应结合其他测试方法和虚拟仿真数据,综合考虑综合性能和实际使用情况。
总之,汽车操纵稳定性道路试验测试方法的研究是评估车辆操纵性能和安全性能的重要内容。
通过合理选择测试方法和准确记录数据,可以为汽车制造商和消费者提供有关车辆操纵稳定性的参考信息,促进汽车行业的发展。
汽车操纵稳定性试验的相关研究
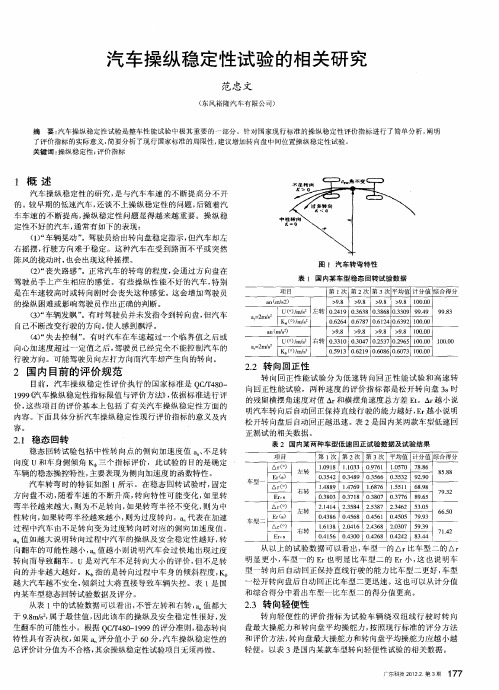
21 稳态 回转 .
稳 态 回转 试 验 包 括 中 性 转 向 点 的 侧 向加 速 度 值 不 足 转 向度 U和 车 身 侧倾 角 K 三 个 指 标 评 价 ,此 试验 的 目的 是 确 定 车 辆 的稳 态 操 控 特 性 , 要 表现 为侧 向加 速 度 的 函数 特 性 。 主 汽车转弯 时的特征 如图 1 示。在稳态 回转试 验时 , 所 固定 方 向盘不 动, 随着 车速 的不断升高 , 向特 性可能变化 , 转 如里转
容。
22 转 向 回正性 .
转 向 回 正 性 能试 验 分 为 低 速 转 向 回 正 性 能 试 验 和 高 速 转 向 回正 性 能 试 验 ,两 种 速 度 的 评 价 指 标 都 是 松 开 转 向盘 3 时 s 的残 留横 摆 角 速 度 对 值 △ 和 横 摆 角速 度 总 方 差 E 。△ 越 小 说 r t r 明汽车转向后 自动回正保持直线行驶 的能力越 好, r E 越小说 明
中
右摇摆 , 行驶方 向难于稳定 。这种汽车在 受到路面不平或突然
陈 风 的 拢 动 时 , 会 出现 这 种 摇 摆 。 也 () 丧失路感 ” 2“ 。正常汽车 的转弯 的程度 , 会通过方向盘在 驾 驶 员 手 上 产 生相 应 的 感觉 。有 些 操 纵 性 能 不 好 的汽 车 , 别 特 是在 车速 较 高 时或 转 向剧 时会 丧 失这 种 感 觉 。这 会增 加 驾驶 员 的 操 纵 困 难 或 影 响 驾驶 员作 出正 确 的判 断 。 () 车 辆 发 飘 ” 3“ 。有 时 驾驶 员并 未 发 指 令 到 转 向盘 , 汽 车 但 自 己不 断 改变 行驶 的方 向 , 人 感 到 飘 浮 。 使 () 失去 控 制  ̄ 4“ * I P 时汽 车 在 车 速 超 过 一 个 临 界 值 之 后 或 o有 向 一 D 速 度 超 过 一 定 值 之 后 , 驶 员 已经 完 全 不 能控 制 汽 车 的 CH  ̄ , 驾 行驶 方向。可 能驾驶 员向左 打方 向而汽车却产生 向的转 向。
对汽车操纵稳定性的影响因素分析及对操稳性的研究评价
#& % 前轴或车架变形导致汽车操纵失稳
由于车架是汽车的基础,它的变形会直接影响各部件的连 接及配合, 从而直接影响操纵稳定性。如果汽车前轴变形, 就会 改变主销孔的轴线位置, 使主销内倾角变大, 则外倾角变小, 反 之, 内倾角变小, 外倾角变大, 从而行驶时会产生转向沉重, 磨 胎和无自动回正的能力。
万方数据 # 来稿日期: (""+ # "% # (%
++++++++++++++++++++++++++++++++++++++++++++++++++++++++++,
前悬架导向机构的几何参数决定前轮定位参数的变化趋 势和变化率。在车轮跳动时,外倾角的变化包括由车身侧倾产 生的车轮外倾变化和车轮相对车身的跳动而引起的外倾变化 两部分。在双横臂独立悬架中,前一种变化使车轮向车身侧倾 的方向倾斜, 即外倾角增大, 结果使轮胎侧偏刚度变小, 因而使 整车不足转向效果加大;后一种变化取决于悬架上、下臂运动 的几何关系,在双横臂结构中,往往是外倾角随弹簧压缩行程 的增大而减小,这种变化与车身侧倾引起的外倾角变化相反, 会产生过度转向趋势。 后悬架结构参数对汽车操纵稳定性的影响, 近似于前悬架的 “干涉转向” 。它是在汽车转向时,由于车身侧倾导致独立悬架的 左右车轮相对车身的距离发生变化,外侧车轮上跳,与车身的距 离缩短,内侧车轮下拉,与车身的距离加大。悬架的结构参数不 同, 车轮上下跳动时, 车轮前束角的变化规律也必然会不同。 前轮前束指汽车转向的前端向内收使两前轮的前端距离 小于后端距离。两车轮前后的距离之差, 称为前束值, 一般不大 于 Y X !(OO。其作用是消除由于前轮外倾使车轮滚动时向外分 开, 引起车轮滚动时边滚边拖的现象, 引导前轮沿直线行驶。 主销内倾角与后倾角由结构上保证, 在调整时难以改变。调 整时主要调整前轮外倾及前轮前束。前轮外倾随负荷的变化而变 化。当车辆转向时, 在离心力作用下, 车身向外倾斜, 外轮悬架处 于压缩状态, 车轮外倾角逐渐减小 ’ 向负外倾变化 * ; 内轮悬架处 于伸张状态,使得本来对道路向负外倾变化的外倾角减弱。从而 提高车轮承受侧向力的能力, 使汽车转向时稳定性大为提高。前 轮前束不可过大,若前束过大,会使车轮外倾角、主销后倾角变 小, 会使前轮出现摆头现象, 行驶中有蛇行, 转向操作不稳。 横向稳定杆常用来提高悬架的侧倾角刚度,或是调整前、后 悬架侧倾角刚度的比值。在汽车转弯时,它可以防止车身产生很 大的横向侧倾和横向角振动,以保证汽车具有良好的行驶稳定 性。提高横向稳定杆的刚度后, 前悬架的侧倾角刚度增加, 转向时 左右轮荷变化加大,前轴的每个车轮的平均侧偏刚度减小,汽车
汽车的操纵稳定性概述
汽车在其行驶过程中, 碰到各种复杂的隋况 , 有时沿直线行驶, 有时 线 。当车速不变时, 汽车横摆角速度本应立即变到相应的 ∞ 。 , 但实际上 沿曲线行驶。此外, 汽车还要经受来 自地面不平 、 坡道 、 大风等各种外部 汽车横摆角速度的变化为 ∞ ( t ) 。此过程及为瞬态响应 , 其将 如图 1 。 因素的干扰。 操纵 陛差 , 导致汽车侧滑、 倾覆, 汽车的稳定性就破坏了。 如 2 . 1相应时间滞后。 汽车的横摆角速度不能立即达到稳态横摆角速 稳定 l 生 差, 则会失去操纵 陛。 汽车的操纵稳定 陛, 是汽车的主要使甩陛能 度 t o o , 而要经过时问 t o , 这段时间短、 驾驶员将感到汽车转向反应速度 , 之一 , 随着汽车速度的提高 , 操纵稳定胜越来越显得重要。 它不仅影响着 否则驾驶员将感到汽车转 向反应迟钝。 汽车的行驶安全 , 而且与运输生产率和驾驶员的疲劳强度有关。 2 . 2横摆角速度超调量 。最大的横摆角速度 ( 0 , 1 0 o( I ) 加 1 0 O 9 猕 为 1汽车 操纵 稳定 性 超调量。 它表示执行指令误差的大小。 超调量越小越好。 减小超调量可 汽车在纵 向坡道上行驶时 , 例如等速上坡 , 随着道路坡度增大 , 作 使横摆角速度波动较 决衰减。 用在前 、 后车轮上的法向反作用力也发生相应的改变 , 前轮的地面法向 2 . 3横摆角速度的波动。 在瞬态响应中, 横摆角速度 C O 以频率 C O 在 反作用力不断减小。 当道路坡度大到一定程度时, 前轮地面法向反作用 ( 1 ) 值 上下波动。波动的频率 ∞, 决定与汽车动力学系统的结构参数 , 也 力为零。 在这样的坡度上 , 汽车将失去操纵 , 并可能产生纵向翻倒。 汽车 上坡时 , 坡度阻力随坡度的增大而增加 , 在坡度大到一定程度时, 为克 2 . 4稳定时间。横摆角速度达到稳定值的 9 5 % 1 0 5 %之间的时间, 服坡度阻力所需要的驱动力超过附着力 , 此时驱动轮将滑转。 这两种情 称为稳定时间。 这段时间应尽量短些 , 凡是能使横摆角速度加快衰减的 性遭到破坏。假定汽车在硬路面上以较低的 因素, 也是使稳定时间缩短的因素。 速度等速上坡 , 空气阻力及滚动阻力可忽略不计 , 当前轮的法向反作用 个别汽车可能出现横摆角速度不收敛隋况, 即 ∞越来越大 , 若车速 力等于零 时, 即汽车上坡发生绕后轴翻车的情况 , 经过整理 , 可推出不 不变 即转 向半径越来越小 , 就会急剧增加离心力 , 汽车将发生侧滑或侧 发生翻车的最大坡度角由下式确定 : 翻等危险 隋况。 t a n a m  ̄ = h / h g ( 1 ) 汽车的操纵稳定性同汽车行驶时的瞬态响应应有密切关系。常用 上式中, b 为汽车重心到后轴之间的距离 , h 为汽车重心的高度。 当 转向盘角阶跃输人下 的瞬态响应来表征。给等速直线行驶的汽车以前 道路的坡度角 ≥ 一时 , 汽车即失去操纵 陛并可能绕后轴翻到。由上 轮角阶输 ^, 经过短暂时间后 , 将进人等速圆周行驶 。等速直线行驶与 式可知, 汽车重心至后轴的距离 b 越大 , 重心高度 h 越低 , 则汽车不致 等速圆周行驶的过度过程便是瞬态,相应的响应称为前轮角阶跃输 入 上升坡度便越大 ,汽车的纵 向稳定 也就 下的汽车瞬态响应。 在一般汽车行驶时 , 实际上驾驶员不断接触到的是
汽车操纵稳定性评价方法研究
汽车操纵稳定性评价方法研究汽车的操纵稳定性是衡量汽车行驶质量的一个重要指标。
一辆汽车的操纵稳定性,不仅关乎乘坐者的安全与舒适,也直接影响车辆的市场竞争力。
为了精确地评价一辆汽车的操纵稳定性,需要运用科学的测试方法和评价标准。
评价方法1. 车载试验车载试验是评价一辆汽车操纵稳定性的一个重要手段。
通过在车内安装多种测试仪器,如惯性测量单元(IMU)、制动力反馈(BBFM)、转向率传感器(TSR)等,对汽车在不同的路况和驾驶状态下进行测试和分析。
车载试验可以动态地评估汽车的加速度、制动、转向等指标,及时反馈车辆运动学和动力学参数的变化,有利于发现和整改车辆操纵稳定性的缺陷,提高行驶安全性和舒适性。
2. 静态试验静态试验是对汽车操纵稳定性的一种简单而又直接的评估方式。
通过推拉车测量系统、悬架测试机等设备对汽车的悬架系统、悬挂刚度、车身刚度等进行测试分析,从而评估汽车悬架系统的稳定性。
静态试验方法可以帮助设计人员优化汽车结构设计,提高车辆操纵稳定性。
3. 路试路试是指在真实路况下对汽车操纵稳定性进行评估。
通过在不同路段进行测试,如山路、高速公路等,可以评估车辆在不同路况下的操纵稳定性。
路试有利于检测车辆在实际操作中的运动学和动力学性能,全面评估车辆的操纵稳定性。
评价标准1. 车辆侧倾角(roll angle)车辆在转弯时的侧倾角是评估操纵稳定性的一个重要指标。
一辆汽车悬挂系统的稳定性能够直接影响车辆的侧倾角大小。
在较高的车辆侧倾角下,车辆容易失去操纵,导致事故的发生。
2. 车辆侧向加速度(Lateral Acceleration)侧向加速度能够反映车辆在转弯时的稳定性。
较小的侧向加速度代表车辆的稳定性较好。
在高速公路上行驶,若车辆的侧向加速度过大,则容易导致车辆失去操纵。
3. 车辆制动减速度(Braking Deceleration)车辆制动减速度是一个反映汽车操纵稳定性的重要指标。
在制动时,车辆制动减速度越大,代表汽车的稳定性越好。
汽车操纵稳定性控制系统的分析

汽车操纵稳定性控制系统的分析【摘要】汽车操纵稳定性的研究,是与汽车车速的不断提高分不开的。
早期的低速汽车,还谈不上操纵稳定性问题,最早提出操纵稳定性问题,是在具有较高车速的赛车上。
后来,随着车速的不断提高,在轿车、大客车和载货汽车上也都不同程度地出现了类似的问题。
因此汽车操纵稳定性的研究成为当今研究热点。
本文从国内外汽车操纵稳定性控制的研究现状出发,对汽车操纵稳定性进行仿真分析。
【关键词】汽车操纵稳定性控制仿真一、汽车操纵稳定性研究的目的及意义随着高速公路的发展和汽车技术的进步,公路交通呈现出行驶高速化、车流密集化的趋势。
现代轿车的设计最高时速一般都大于200km/h,有的运动型轿车甚至超过300km/h。
汽车在高速公路上的行驶速度通常也都在lookm/h,其次驾驶员的非职业化发展趋势,使得车辆在高速行驶时出现了各种各样的稳定性问题。
要求汽车具有更好的可控性和更高的行驶安全性。
因此,汽车的操纵稳定性日益受到重视,成为现代汽车研究的重点。
二、国内外研究现状国外发达越来越多的车型已将电子稳定性控制系统作为其标准配置2005年大约40%的新注册车辆配备了esp,在高档车上,esp 已经成为了标准配置,中档车上的装配率也迅速提高,在紧凑型车上装配率稍低。
国内对汽车操纵稳定性控制的研究起步较晚,目前仍然处于研究开发的初期,没有具备自主知识产权的产品。
电子稳定性控制系统的装配率还比较低,以往通常只在高档车上才装配esp,2006年上市的东风雪铁龙的凯旋、一汽大众的速腾和上海通用的君越都配有esp[141,但是装备的都是国外公司的产品,国内还没有自己的实际开发系统的能力,大多数学者只是基于理论的研究。
三、车辆操纵稳定性控制的基本原理及分析汽车电子稳定控制的基本思想是通过对临界稳态工况的控制,来阻止汽车进入不可控的非稳态,此时汽车的质心侧偏角往往较大,车轮的侧向力已接近轮胎与路面的附着极限,此时方向盘转角控制对车辆稳定性的改善并不明显,所以一般不使用方向盘转角控制,可以采用通过纵向力匹配来产生横摆力矩的控制方法来改善车辆稳定性。
汽车的操纵稳定性和平顺性教案

总结词:不良车型在操纵稳定性和平 顺性方面存在明显不足,驾驶和乘坐 体验较差。
操纵稳定性:不良车型通常存在转向 反馈模糊、行驶轨迹不稳定的问题。 车轮定位参数不合理或悬挂系统调校 不当可能导致操控性能不佳,使驾驶 员难以控制车辆的行驶轨迹。在高速 行驶或紧急变道时,不良车型可能表 现出较大的侧倾或摆动,降低驾驶安 全性。
07
总结与展望
本课程总结
01
02
03
04
掌握汽车操纵稳定性和平顺性 的基本概念和评价指标。
学习了影响汽车操纵稳定性和 平顺性的主要因素,包括轮胎 、悬挂系统、转向系统等。
理解了如何通过设计优化和调 整来提高汽车的操纵稳定性和
平顺性。
实践了汽车操纵稳定性和平顺 性的测试和评价方法。
对未来研究的展望
路面状况
不同路面状况对车辆的平顺性产 生直接影响,如颠簸的路面会导
致车辆振动加剧。
悬挂系统设计
悬挂系统是影响平顺性的关键因素, 设计合理的悬挂系统可以有效吸收 路面振动,提高平顺性。
座椅舒适度
座椅的舒适度直接影响乘坐人员的 感受,高品质的座椅能够提供更好 的减震效果。数, 提高悬挂系统对路面振动的吸收
平顺性:不良车型可能采用较为粗糙 的减震技术,导致在颠簸路面上行驶 时出现明显的震动和冲击。座椅设计 缺乏人体工程学考虑,长时间乘坐容 易引发疲劳。此外,发动机、传动系 统和底盘之间的匹配不佳可能导致动 力输出不顺畅,进一步影响行驶的平 顺性。整体而言,不良车型在操纵稳 定性和平顺性方面的不足会严重影响 驾驶和乘坐的舒适度及安全性。
驾驶员操作
驾驶员的驾驶技术、对车 辆性能的了解程度以及驾 驶心态等都会影响操纵稳 定性。
道路条件
道路的曲率、路面状况、 能见度等因素也会影响汽 车的操纵稳定性。
汽车的操作稳定性论文范文

第一章绪论1.1课题研究的意义根据路面的交通情况,汽车有时直线行驶,有时沿曲线行驶。
在出现意外情况时,驾驶员还要做出紧急的转向操作,以求避免事故。
此外,汽车在行驶中还不断受到地面不平和大风等外界因素的干扰。
为此,汽车应具备良好的操纵稳定性。
在实际中,从驾驶员感性的角度描述,操纵稳定性不好的汽车通常有以下几类表现:“飘”。
有时驾驶员并未发出指令,而汽车白己不断改变方向;“晃”。
驾驶员给出稳定的转向指令,但汽车却左右摇摆,行驶方问难于稳定。
汽车在受到路面不平或忽然阵风的扰动时,也会出现这种感觉;3)“反应迟饨”,驾驶员己经发出指令相当长的时间,但汽车还没有反应或转向过程完成太慢; 4)“丧失路感”。
正常汽车的转弯程度会通过方向盘在驾驶员的于上产生相应的感觉。
有些操纵性能不好的汽车,特别是在高速或转向剧烈的时候会丧失这种感觉。
这会增加驾驶员的操纵困难或影响驾驶员做出正确的判断;5)“失去控制”。
某些汽车在车速超过一个临界值后或向心加速度超过定值之后,驾驶员已经完全不能控制其方向。
随着道路的改善,特别是高速公路的发展,不仅轿车,连货车以100 km/h车速行驶的情况也是常见的,而许多汽车设计时速更超过200 km/h。
随着汽车速度的不断提高。
汽车操纵稳定性的问题就显得更加突出。
操纵稳定性不仅影响到汽车驾驶的操纵方便程度,而且也是决定高速汽车安全行驶的一个主要性能,被称之为“高速汽车的生命线”。
所以,汽车操纵稳定性的研究日益受到重视,成为现代汽车研究中最重要的课题之一。
汽车控制是靠驾驶员对转向系统的操纵而进行的,在一般的操纵条件下能够达到要求,但汽车处于恶劣工作状态或紧急状况时,汽车的控制往往比较困难,而绝大多数交通事故就发生在这种非理想的驾驶状况下,所以在这些工况下增加辅助控制以提高汽车操纵性、稳定性是十分必要的。
1.2操纵稳定性研究的概况操纵稳定性研究的早期,一般采用经典力学分析方法,进行一些简单、局部的校核计算,不能对车辆的整体性能进行评价和分析,不能对汽车设计提供直接的指导。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1 研 究 方 法
最 早 研 究 汽车 操 纵稳 定 性 的学 者是 汽 车工 程 师M a u r i c e O l l e y , 他对 汽 车操纵 稳定 性进 行 了定 性 分析 。随后 , 其 他 一 些 专 家 学 者 也 一 直 在 进 行
e l 在 前 辈 们研 究 成 果 的基 础 上 又 建 立 了“ 线 性 四 自由度 汽 车 转 向模 型 ” 5 J 。学 者 们 应 用 这 些 数 学 模 型对 汽车 的稳 态 转 向特性 和瞬态 转 向特 性 进行
基金项 目: 江苏省 自然科学基金资助项 目( B K 2 0 1 2 5 8 6 ) ; 国家 自然科学基金资助项 目( 5 1 3 0 5 1 7 5 )
纵 轻便 程度 的同 时 , 也成 为汽车 行驶 安全 的主要参
考 因素 之一 。因此 , 汽车操 纵稳定 性一 直 以来 都是 世 界各 国专家 学者们 研究 的主要 课题 之一 。 操纵 稳定性 研究 主要从 以下 3个 方面进 行 ¨ J :
a . 通过试 验对 与 汽 车操 纵 稳定 性 相 关 的 主要 运 动量 进行测 量 , 通 过人 一车 闭环系统 来研究 汽 车
感觉, 对 汽车 的性能进 行 主观评价 ;
c . 通过建 立 汽 车动 力 学模 型和 人 一车 闭环 系
在 汽车操 纵稳 定 性 研 究初 期 采 用 的基 本 上 都 是开环方法。1 9 2 5年 , B r o u l h e i t 在 文 章 中首 次 提
统模 型 , 运用仿 真软件 对 汽车 的操 纵稳定 性进 行研 究 和客 观评价 。
现 如今 , 随着 经 济 的发 展 和科 技 的进 步 , 越来
越 多 的人 拥有 和使 用汽车 。与此 同 时 , 伴随着 汽车 保 有量 的逐年 增加 以及交 通事故 的频 繁发 生 , 汽 车
客观评 价法 和主观 评价 法 。
1 . 1 研 究 方 法
的使用性能受到越来越多的关注, 汽车的行驶安全
汽车数 学模 型 的建立 、 轮 胎模 型的 建 立、 驾驶 员模 型 的建 立 、 评 价指 标 的提 出等 问题 的研 究历 史
与现状 , 以及操 纵 逆动 力学在操 纵稳 定性研 究 中的发展 历 史 , 综述 了虚 拟仿 真在 汽 车操 纵稳 定 性
研 究 中的应 用历 史 , 最后提 出 了操纵 稳定性 研 究要 解 决的一 些 问题 。 关键词 : 汽车操纵 稳 定性 ; 开环/ 闭环 系统 ; 主 客观评 价 ; 仿 真
作者简介 : 汪伟( 1 9 8 4 一) , 男, 江西弋 阳人 , 江苏理工学院讲 师, 博士 , 主要研究方向为车辆 系统动 力学 。
着相关 研究 。 汽车 操 纵稳 定 性 的研究 方 法 主要有 开 环 系统
收稿 日期 : 2 0 1 4—0 8一l 8
Wh i t e c o m b等人 建立 了“ 二 自由度 线性 汽车 转 向模
型” 和“ 三 自由度 线性 汽车 转 向模 型 ” ; 1 9 6 5年 S e g —
中 图分 类 号 : U 4 6 1 . 6
文献标 识码 : A
文章 编号 : 2 0 9 5— 5 0 9 X( 2 0 1 4 ) 1 0— 0 0 0 6— 0 7 法和 闭环系统 法 , 以及 近些年发 展起 来 的操纵逆 动
力 学法 。操纵 稳定性 好坏 的评 价方法 又分 为两类 :
性 也受 到前所 未 有 的重 视 。作 为 汽 车使 用 性 能 的
一
1 . 1 . 1 开环 系统 法
个重 要方 面 , 汽 车操纵 稳定性 在影 响汽车 驾驶操
所 谓开环 系统 法 , 就是 已知驾驶 员操 纵输 入和
汽车模 型 的情 况下求 得 汽车运 动状 态响 应 , 其研 究
2 0 1 4年 1 0月 第4 3卷 第 1 0期
机械设计与制造工程
M a c h i n e D e s i g n a n d M a n u f a c t u r i n g E n g i n e e i r n g
0c t . 2 01 4
V o 1 . 4 3 No . 1 0
D O I : 1 0 . 3 9 6 9 / j . i s s n . 2 0 9 5— 5 0 9 X . 2 0 1 4 . 1 0 . 0 0 2
汽 车 操 纵 稳 定 性 研 究 的 发 展 与 展 望
汪 伟 , 贝绍轶 , 赵 又群 , 汪永志 , 张兰春 , 杨 慧
过 程没有 考虑 驾驶 员 的反 馈作 用 。汽 车开 环 系 统 示意 图如 图 1 所示 。
一
笪 .
J . . . . . . . . . . . . . . . . . . . . . . . . _ J
图1 汽 车 开 环 系统
的特性 , 并 按 照研究 结果建 立评价 指标进 行评 价 ; b . 通过 研究 驾驶 员在 汽 车 试验 过 程 中的 主观
出侧 偏 和侧偏 角 的概 念 , 为汽 车高速 稳定 性 的研 究 打下 了基 础 。1 9 3 1年 , B e c k e r 等 人通 过研 究 轮 胎
特性 对 汽车操 纵稳定 性 的影 响 , 促进 了汽 车稳 定性
研 究 的 发 展 4 j 。2 0世 纪 3 O年 代 到 6 O年 代 末 , 许
2 1 3 0 0 1 ) 2 1 0 0 1 6 ) ( 1 . 江 苏理工 学 院 汽车 与交 通工程 学 院 , 江苏 常州 ( 2 . 南 京航 空航天 大学 能源 与动力 学 院 , 江苏 南京
摘要 : 详 细 阐述 了汽 车操 纵稳 定性研 究的发 展 历史 。 介 绍 了汽 车操 纵稳 定 性研 究发 展过 程 中诸 如